
Modeling and Implementation of Multi-Position Non-Continuous Rotation Gyroscope North Finder

 ,
,
Abstract
:1. Introduction
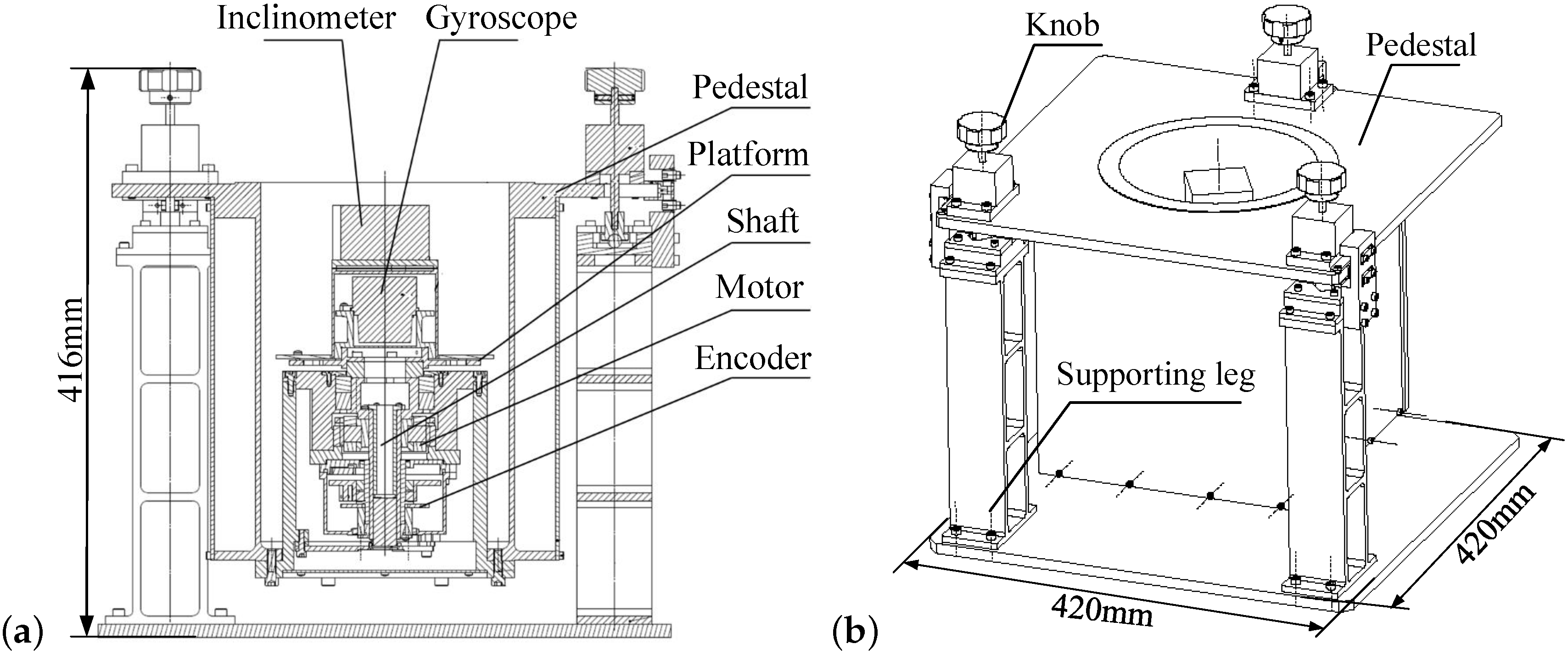
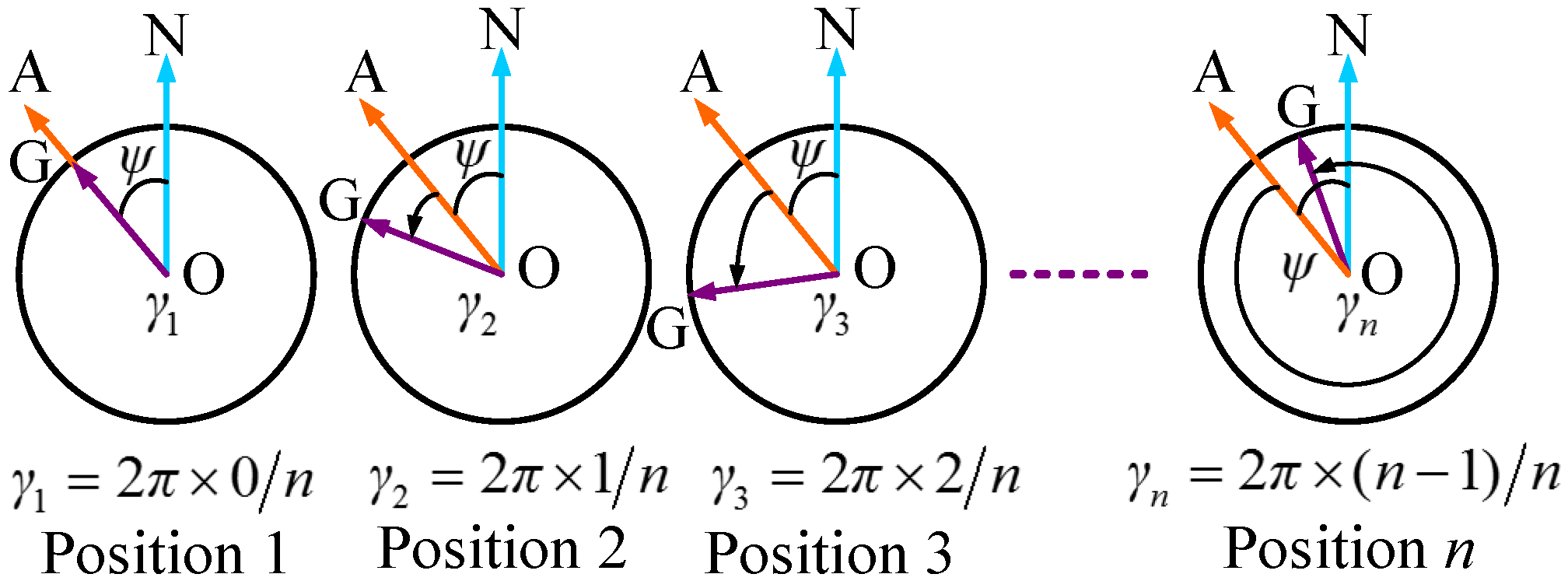
2. The Multi-Position Non-Continuous Rotation Gyro North Finder Scheme
3. Modeling of the Gyro Outputs
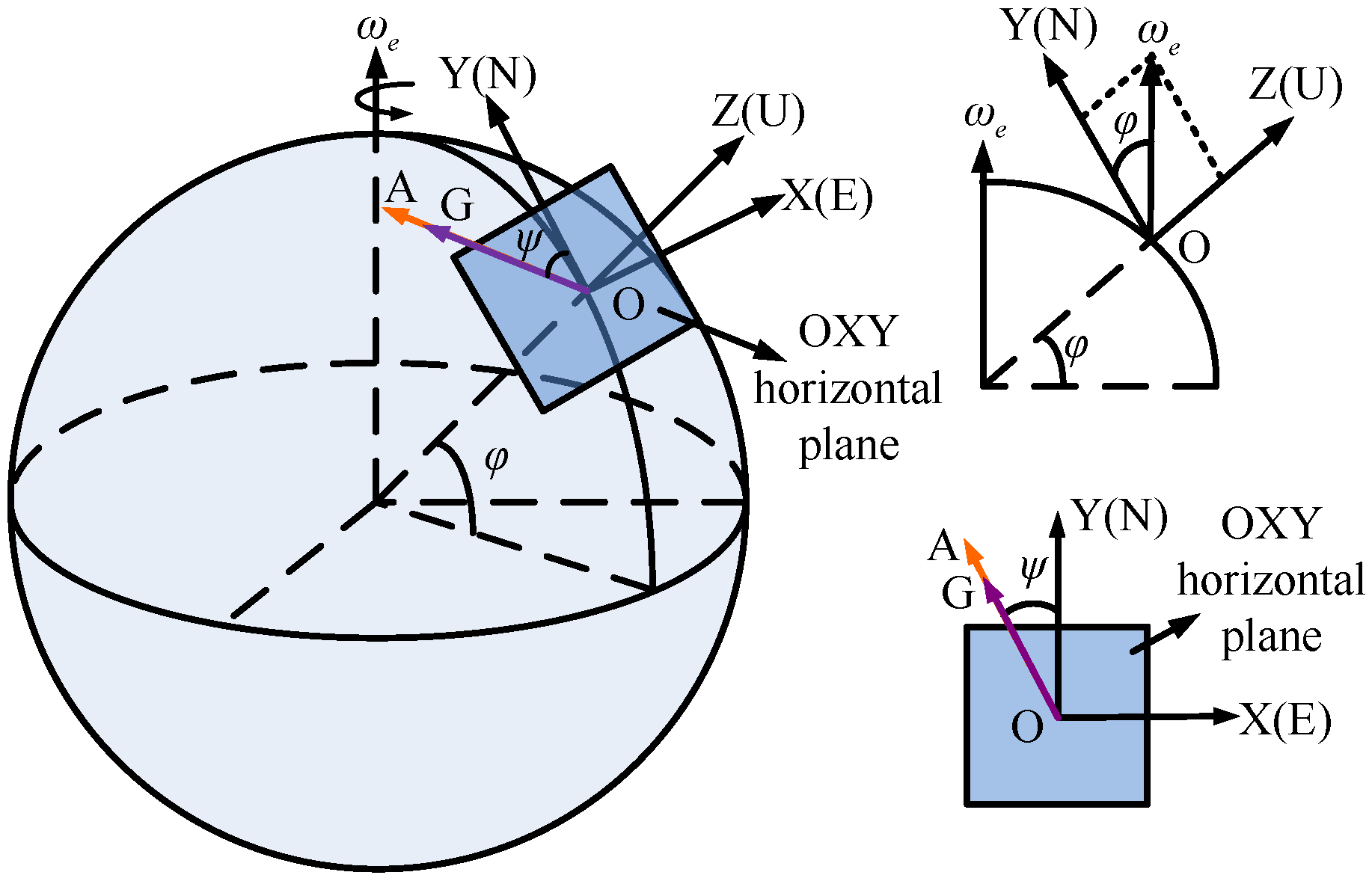
3.1. Gyro Outputs Modeling Under Ideal Conditions
3.2. Gyro Outputs Modeling with Gyro Misalignment
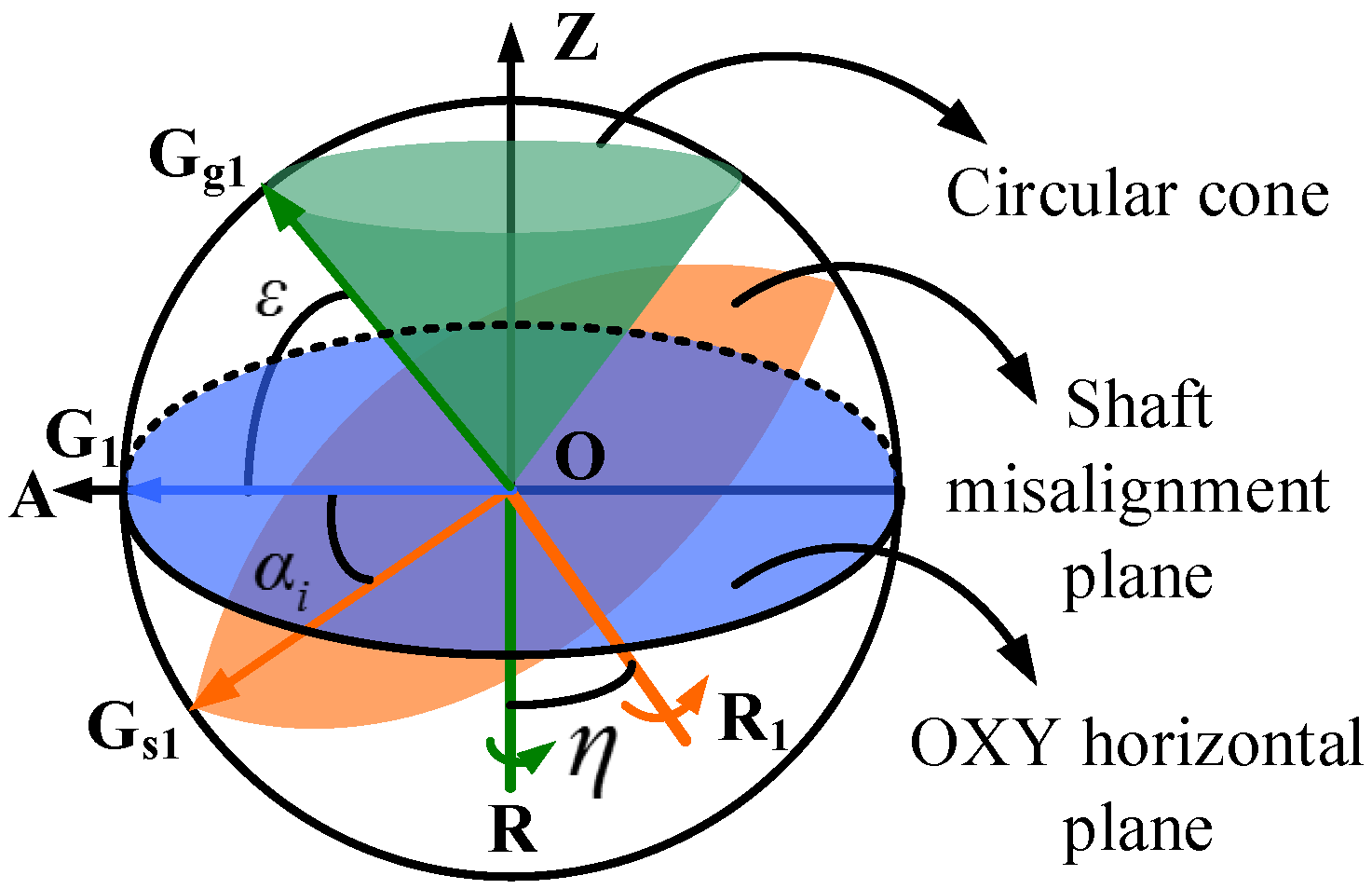
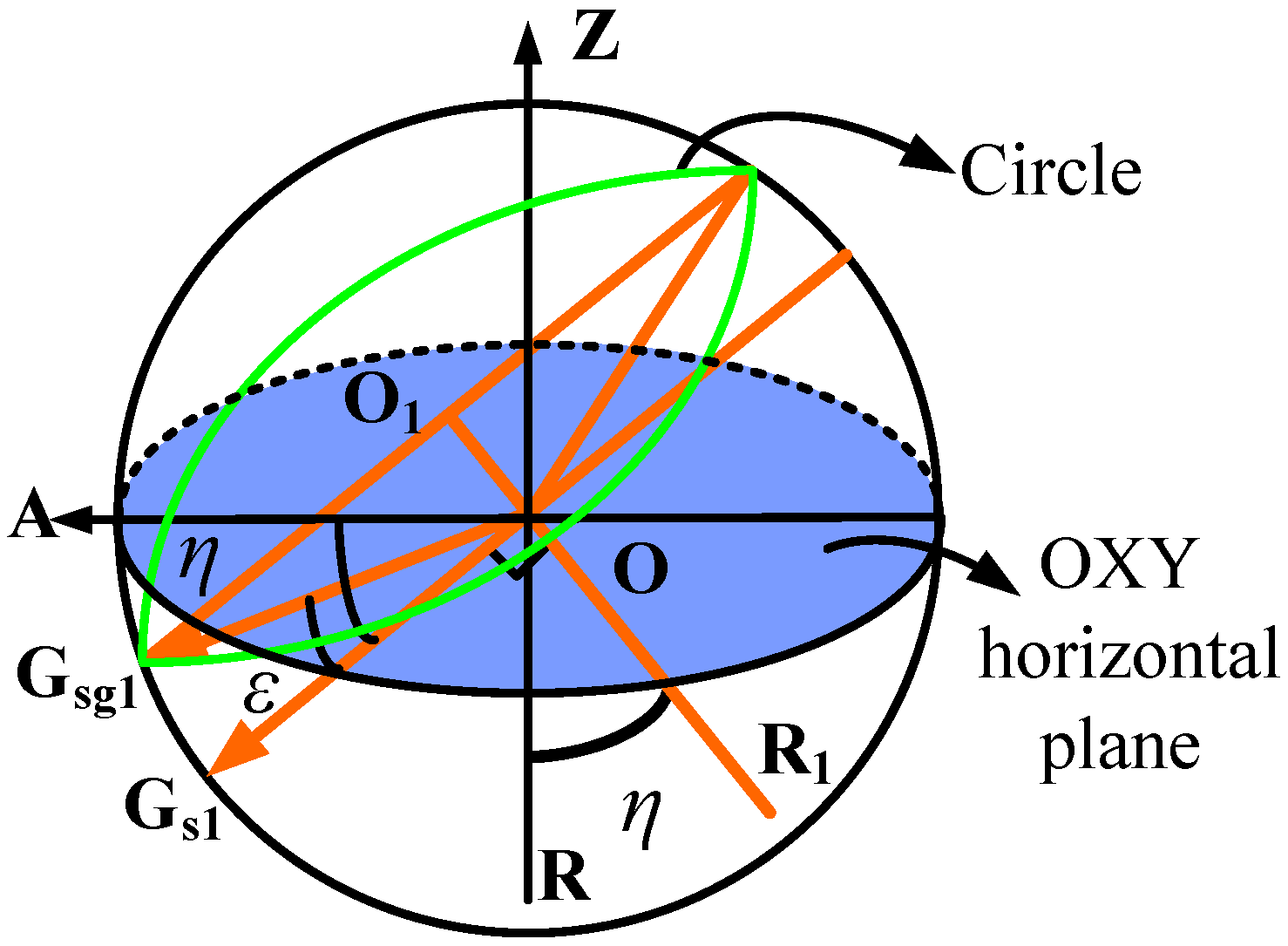
3.3. Gyro Outputs Modeling with Shaft Misalignment
4. Estimate Azimuth Uncertainty
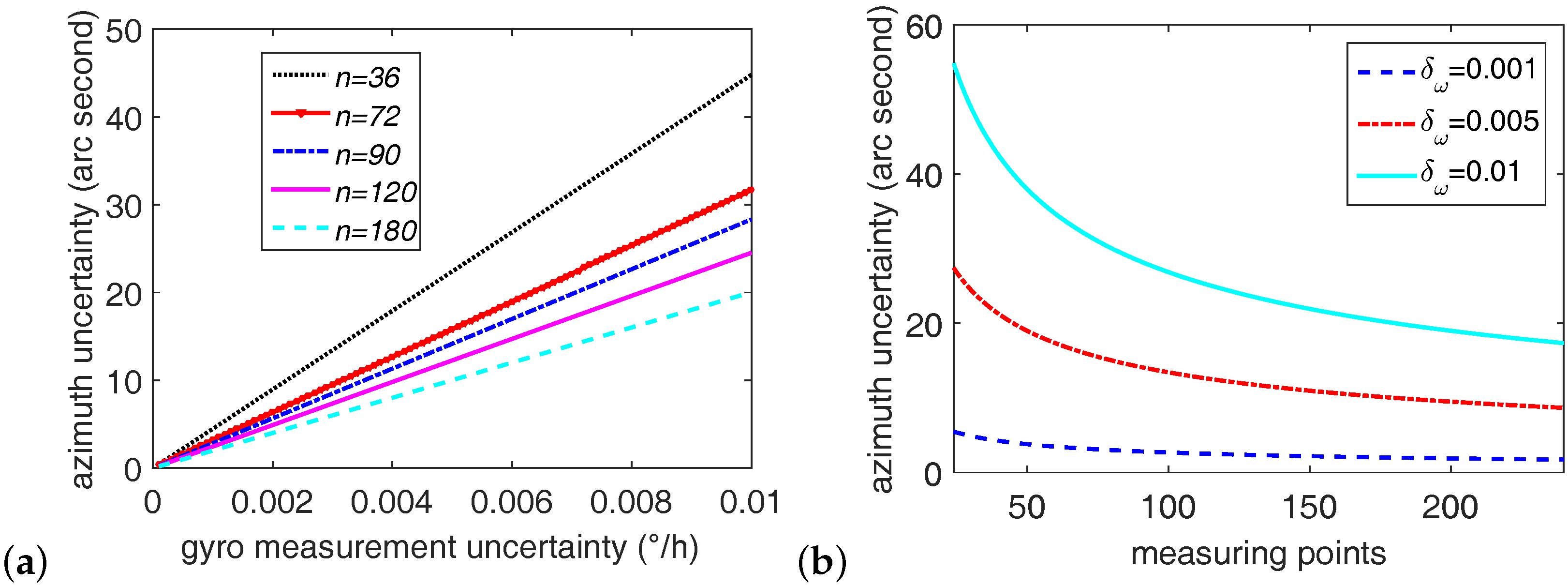
- Constrain the gyro bias error and the gyro random error. Regarding to the former, on one hand, selecting a high precision gyro usually attains a low bias error; on the other hand, using filtering approaches [20,24,32] is an alternative method to reduce the gyro bias error. For the gyro random error, a simple and effective method is to average a large number of gyro outputs at each rotation position. Other filtering approaches can be found in [21,22,24,25] .
- Increase the number of measurement points (ensure that the north finding time is less than the time scale of the bias instability [4]).
- Execute the azimuth measurement at a low latitude area. When the north finding experiment is executed at the equator (), all the earth rotation rate is detected by the gyro sensitive axis. In contrast, the north finding task is impossible to achieve when φ = 90. Generally, the north finding experiment should be conducted away from the Antarctic Circle and the Arctic Circle.
- Improve the encoder measurement precision. In the multi-position north finding scheme, a high precise rotary platform and a corresponding high precision encoder are prerequisites to achieve high precision azimuth results.
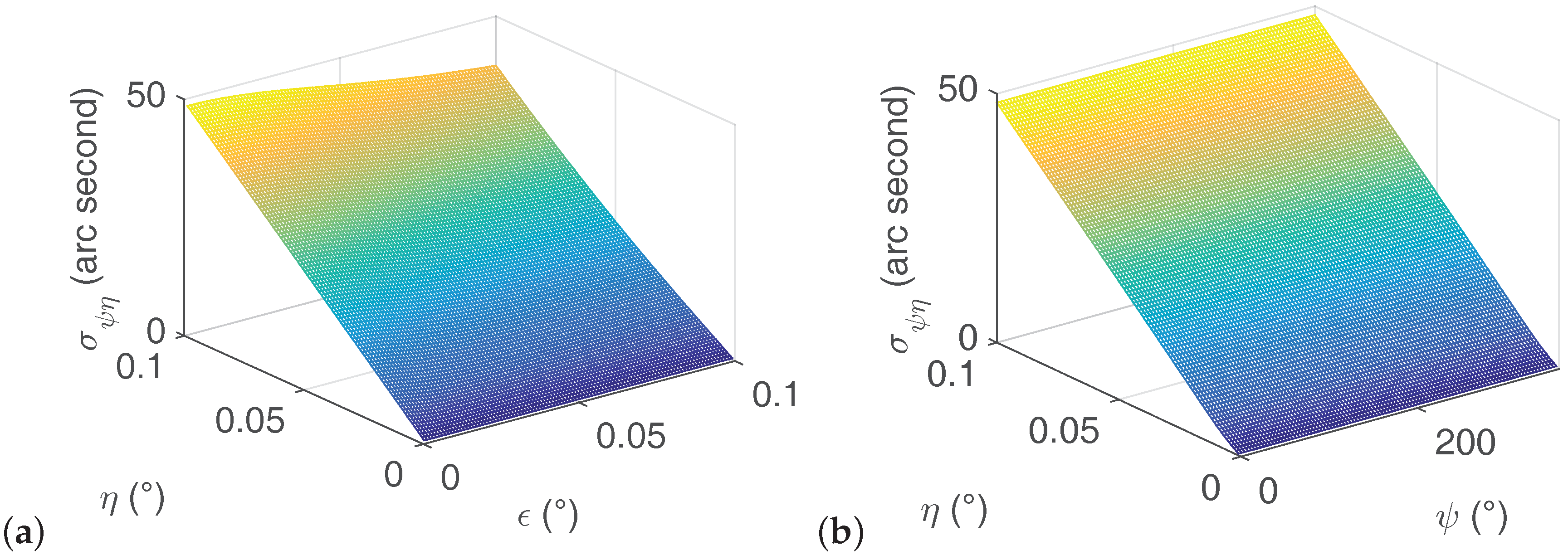
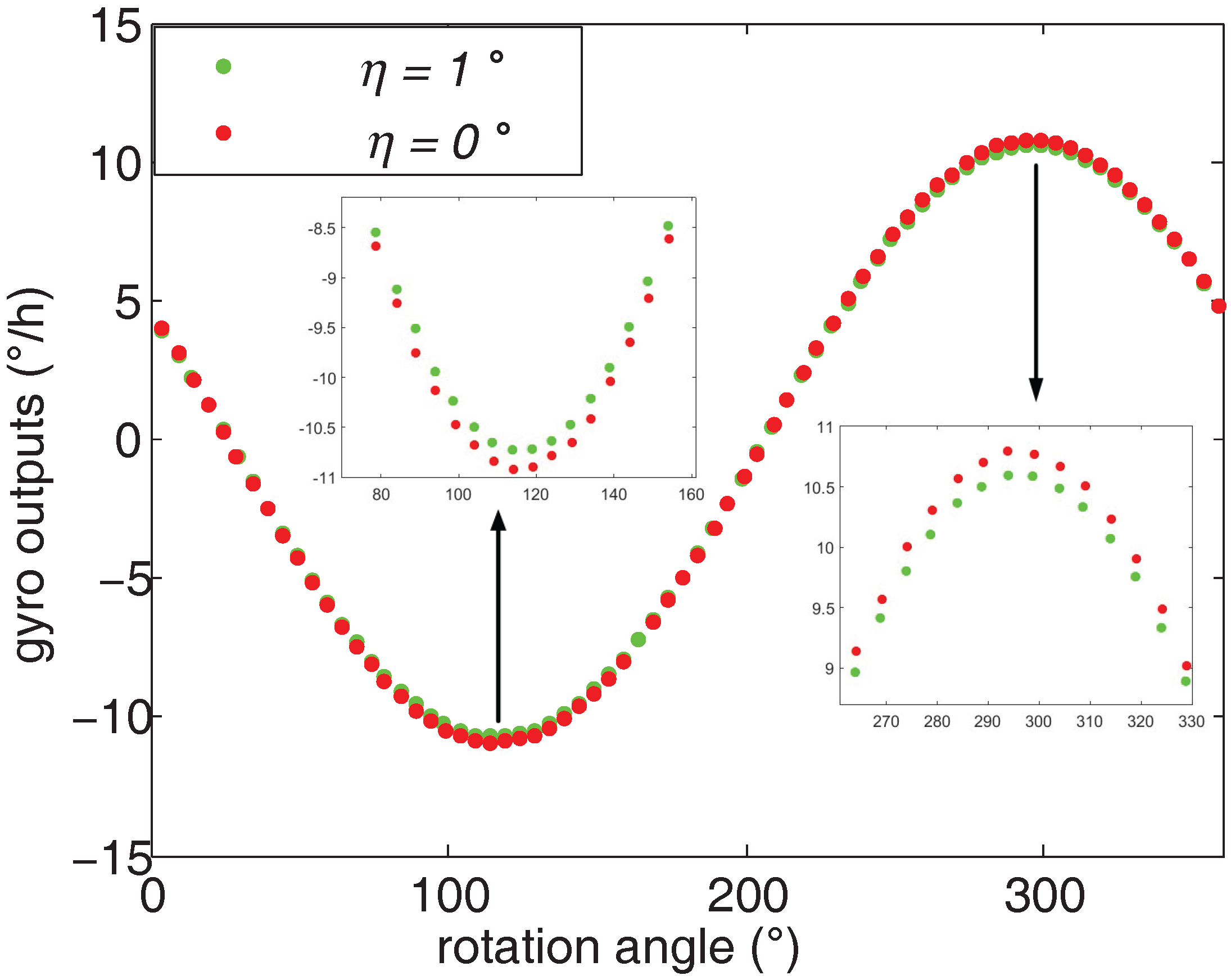
- Align the shaft to make the shaft misalignment angle as small as possible. As described in Equation (28), the gyro misalignment angle has no effect on the azimuth results when shaft misalignment angle is 0. However, when a shaft misalignment exists, both the shaft misalignment angle and the gyro misalignment angle corrupt the gyro outputs, as shown in Figure 7a. Therefore, the best choice is to align the shaft.
- Based on the value of and Equation (24), the gyro bias error and the gyro random error are decided, and then the specified rate gyro can be selected.
- Combining the value of and Equation (26), the encoder uncertainty is calculated, thus the encoder is selected.
- According the value of and Equation (29), the shaft misalignment angle is calculated, thus the shaft misalignment angle measurement instrument can be chosen. In practice, we usually align this angle to a very small value. The details of shaft misalignment angle calculation and alignment process refer to [35].
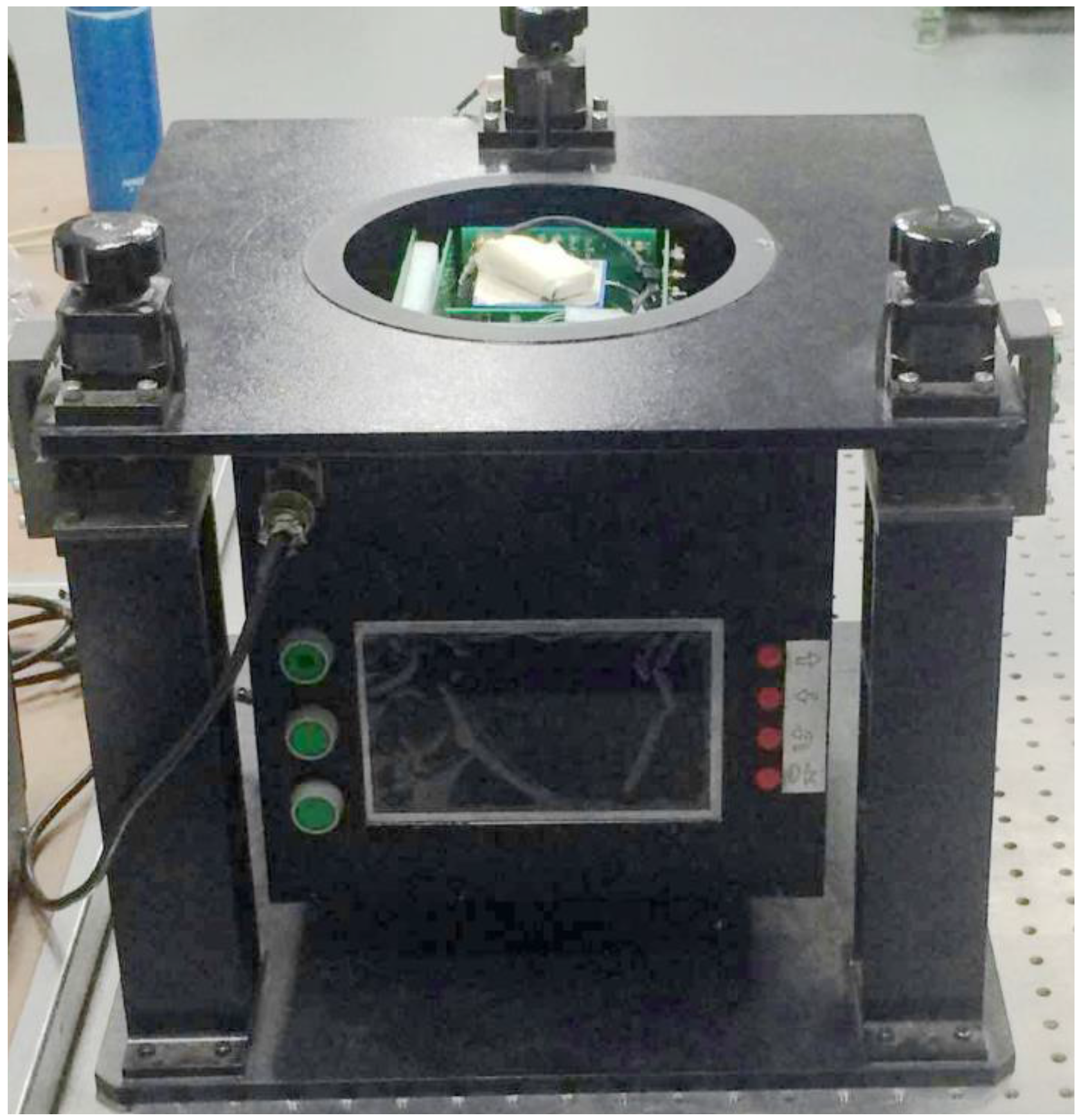
5. Implementation of a High Precision Robust Gyro North Finder
5.1. Gyro Outputs Modeling with Shaft Misalignment
5.2. Azimuth Measurement Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dyott, R. Method for finding true north using a fibre-optic gyroscope. Electron. lett. 1994, 30, 1087–1088. [Google Scholar] [CrossRef]
- Celikel, O. Application of the vector modulation method to the north finder capability gyroscope as a directional sensor. Meas. Sci. Technol. 2011, 22, 035203. [Google Scholar] [CrossRef]
- Arnaudov, R.; Angelov, Y. Earth rotation measurement with micromechanical yaw-rate gyro. Meas. Sci. Technol. 2005, 16, 2300. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Zotov, S.A.; Trusov, A.A.; Shkel, A.M. What is MEMS gyrocompassing? Comparative analysis of maytagging and carouseling. J. Microelectromech. Syst. 2013, 22, 1257–1266. [Google Scholar] [CrossRef]
- Consumer, S.N.T. How good is your gyro? IEEE Control Syst. Mag. 2010, 1066, 12–15. [Google Scholar]
- Raman, J.; Cretu, E.; Rombouts, P.; Weyten, L. A closed-loop digitally controlled MEMS gyroscope with unconstrained sigma-delta force-feedback. IEEE Sens. J. 2009, 9, 297–305. [Google Scholar] [CrossRef] [Green Version]
- Fazlyab, M.; Pedram, M.Z.; Salarieh, H.; Alasty, A. Parameter estimation and interval type-2 fuzzy sliding mode control of a z-axis MEMS gyroscope. ISA Trans. 2013, 52, 900–911. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Li, H.; Kou, Z.; Shi, Y.; Tang, J.; Ma, Z.; Shen, C.; Liu, J. Optimization and experimentation of dual-mass MEMS gyroscope quadrature error correction methods. Sensors 2016, 16, 71. [Google Scholar] [CrossRef] [PubMed]
- Xia, D.; Hu, Y.; Ni, P. A digitalized gyroscope system based on a modified adaptive control method. Sensors 2016, 16, 321. [Google Scholar] [CrossRef] [PubMed]
- Ciminelli, C.; Dell’Olio, F.; Campanella, C.E.; Armenise, M.N. Photonic technologies for angular velocity sensing. Adv. Opt. Photonics 2010, 2, 370–404. [Google Scholar] [CrossRef]
- Qu, T.; Yang, K.; Han, X.; Wu, S.; Huang, Y.; Luo, H. Design of a superluminal ring laser gyroscope using multilayer optical coatings with huge group delay. Sci. Rep. 2014, 4, 7098. [Google Scholar] [CrossRef] [PubMed]
- Terrel, M.A.; Digonnet, M.J.; Fan, S. Resonant fiber optic gyroscope using an air-core fiber. J. Lightwave Technol. 2012, 30, 931–937. [Google Scholar] [CrossRef]
- Ciminelli, C.; Dell’Olio, F.; Campanella, C.; Armenise, M. Numerical and experimental investigation of an optical high-Q spiral resonator gyroscope. In Proceedings of the 2012 14th International Conference on Transparent Optical Networks, Coventry, UK, 2–5 July 2012; pp. 1–4.
- Ciminelli, C.; Dell’Olio, F.; Armenise, M.N. High-Q spiral resonator for optical gyroscope applications: numerical and experimental investigation. IEEE Photonics J. 2012, 4, 1844–1854. [Google Scholar] [CrossRef]
- Wang, J.; Feng, L.; Wang, Q.; Jiao, H.; Wang, X. Suppression of backreflection error in resonator integrated optic gyro by the phase difference traversal method. Opt. lett. 2016, 41, 1586–1589. [Google Scholar] [CrossRef] [PubMed]
- Ciminelli, C.; D’Agostino, D.; Carnicella, G.; Dell’Olio, F.; Conteduca, D.; Ambrosius, H.P.; Smit, M.K.; Armenise, M.N. A high-InP resonant angular velocity sensor for a monolithically integrated optical gyroscope. IEEE Photonics J. 2016, 8, 1–19. [Google Scholar] [CrossRef]
- Song, J.W.; Lee, J.G.; Kang, T. Digital rebalance loop design for a dynamically tuned gyroscope using H2 methodology. Control Eng. Pract. 2002, 10, 1127–1140. [Google Scholar] [CrossRef]
- Cain, J.S.; Staley, D.A.; Heppler, G.R.; McPhee, J. Stability analysis of a dynamically tuned gyroscope. J. Guidance Control Dyn. 2006, 29, 965–969. [Google Scholar] [CrossRef]
- Poletkin, K.V.; Chernomorsky, A.I.; Shearwood, C. Proposal for a micromachined dynamically tuned gyroscope, based on a contactless suspension. IEEE Sens. J. 2012, 12, 2164–2171. [Google Scholar] [CrossRef]
- Xu, G.; Tian, W.; Jin, Z.; Qian, L. Temperature drift modelling and compensation for a dynamically tuned gyroscope by combining WT and SVM method. Meas. Sci. Technol. 2007, 18, 1425. [Google Scholar] [CrossRef]
- Qian, L.; Xu, G.; Tian, W.; Wang, J. A novel hybrid EMD-based drift denoising method for a dynamically tuned gyroscope (DTG). Measurement 2009, 42, 927–932. [Google Scholar] [CrossRef]
- Cheng-Wu, S.; Shao-Jin, L.; Chang, L.; Sheng, C. The application of Kalman filtering technique on the multi-position strap-down north seeking system. In Proceedings of the 2012 Fifth International Symposium on Computational Intelligence and Design, Hangzhou, China, 28–29 October 2012; pp. 273–276.
- Yu, H.; Wu, W.; Wu, M.; Feng, G.; Hao, M. Systematic angle random walk estimation of the constant rate biased ring laser gyro. Sensors 2013, 13, 2750–2762. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Liu, Y.; Li, M.; Song, S. AMA-and RWE-based adaptive Kalman filter for denoising fiber optic gyroscope drift signal. Sensors 2015, 15, 26940–26960. [Google Scholar] [CrossRef] [PubMed]
- Yuan, G.; Yuan, W.; Xue, L.; Xie, J.; Chang, H. Dynamic performance comparison of two Kalman filters for rate signal direct modeling and differencing modeling for combining a MEMS gyroscope array to improve accuracy. Sensors 2015, 15, 27590–27610. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Zhang, P.; Wei, G.; Xie, Y.; Yu, X.; Long, X. Multiple-point temperature gradient algorithm for ring laser gyroscope bias compensation. Sensors 2015, 15, 29910–29922. [Google Scholar] [CrossRef] [PubMed]
- Iozan, L.; Kirkko-Jaakkola, M.; Collin, J.; Takala, J.; Rusu, C. Using a MEMS gyroscope to measure the Earth’s rotation for gyrocompassing applications. Meas. Sci. Technol. 2012, 23, 025005. [Google Scholar] [CrossRef]
- Karnick, D.A.; Hanson, T.J. Gyroscope North Seeker System and Method. U.S. Patent 7,412,775, 19 August 2008. [Google Scholar]
- Yu, H.; Zhu, H.; Gao, D.; Yu, M.; Wu, W. A stationary north-finding scheme for an azimuth rotational IMU utilizing a linear state equality constraint. Sensors 2015, 15, 4368–4387. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.H.; Kwon, Y.; Lee, D.C.; Chung, H.S.; Jeong, H.M. Study on the algorithm characteristic of true north-finding utilizing 1-axis gyro sensor equipment. J. Korea Soc. Power Syst. Eng. 2015, 19, 36–41. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, F.; Li, H. Design and implementation of fiber optic gyro north-seeker. In Proceedings of the 2010 International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 1058–1062.
- Bojja, J.; Collin, J.; Kirkko-Jaakkola, M.; Payne, M.; Griffiths, R.; Takala, J. Compact North Finding System. IEEE Sens. J. 2016, 16, 2554–2563. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.; Shen, C.; Wen, Z.; Liu, S.; Cai, S.; Li, J. Rotating shaft tilt angle measurement using an inclinometer. Meas. Sci. Rev. 2015, 15, 236–243. [Google Scholar] [CrossRef]
- Alegria, F.C. Bias of amplitude estimation using three-parameter sine fitting in the presence of additive noise. Measurement 2009, 42, 748–756. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.; Shen, C.; Liu, S.; Wen, Z. High precision robust automatic alignment method for rotating shaft. MAPAN 2016, 31, 189–196. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Run | Azimuth () | Sum of Residual Square (×0.001) |
|---|---|---|
| 1 | 65.5378 | 0.1484 |
| 2 | 65.5484 | 0.1047 |
| 3 | 65.5324 | 0.1249 |
| 4 | 65.5523 | 0.1021 |
| 5 | 65.5542 | 0.1045 |
| 6 | 65.5472 | 0.0911 |
| 7 | 65.5452 | 0.0668 |
| 8 | 65.5588 | 0.1059 |
| 9 | 65.5554 | 0.074 |
| 10 | 65.5341 | 0.1337 |
| Run | Azimuth () | Sum of Residual Square (×0.0001) |
|---|---|---|
| 1 | 65.5411 | 0.6271 |
| 2 | 65.5225 | 0.894 |
| 3 | 65.5497 | 0.606 |
| 4 | 65.5558 | 0.8603 |
| 5 | 65.5524 | 0.5651 |
| 6 | 65.5571 | 0.6942 |
| 7 | 65.5538 | 0.6859 |
| 8 | 65.5568 | 0.5812 |
| 9 | 65.5427 | 0.5754 |
| 10 | 65.5523 | 0.603 |
| Run | Azimuth () | Sum of Residual Square (×0.0001) |
|---|---|---|
| 1 | 65.5411 | 0.8966 |
| 2 | 65.5225 | 0.7253 |
| 3 | 65.5497 | 0.6616 |
| 4 | 65.5558 | 0.6652 |
| 5 | 65.5524 | 0.4259 |
| 6 | 65.5571 | 0.7311 |
| 7 | 65.5538 | 0.6436 |
| 8 | 65.5568 | 0.6466 |
| 9 | 65.5427 | 0.6887 |
| 10 | 65.5523 | 0.4927 |
| Run | Azimuth () | Sum of Residual Square (×0.0001) |
|---|---|---|
| 1 | 65.5457 | 0.5889 |
| 2 | 65.5277 | 0.8186 |
| 3 | 65.5376 | 0.6666 |
| 4 | 65.5488 | 0.5508 |
| 5 | 65.5513 | 0.723 |
| 6 | 65.5401 | 0.5321 |
| 7 | 65.5392 | 0.5979 |
| 8 | 65.5493 | 0.5302 |
| 9 | 65.5402 | 0.8117 |
| 10 | 65.5451 | 0.5569 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, J.; Wang, Z.; Shen, C.; Kuijper, A.; Wen, Z.; Liu, S. Modeling and Implementation of Multi-Position Non-Continuous Rotation Gyroscope North Finder. Sensors 2016, 16, 1513. https://doi.org/10.3390/s16091513
Luo J, Wang Z, Shen C, Kuijper A, Wen Z, Liu S. Modeling and Implementation of Multi-Position Non-Continuous Rotation Gyroscope North Finder. Sensors. 2016; 16(9):1513. https://doi.org/10.3390/s16091513
Chicago/Turabian StyleLuo, Jun, Zhiqian Wang, Chengwu Shen, Arjan Kuijper, Zhuoman Wen, and Shaojin Liu. 2016. "Modeling and Implementation of Multi-Position Non-Continuous Rotation Gyroscope North Finder" Sensors 16, no. 9: 1513. https://doi.org/10.3390/s16091513