3.1. The Underlimiting and Limiting Currents
The one-dimensional (1D) steady-state,
, solution of the system (
21)–(
33) describes both underlimiting and limiting current regimes. The tangential electric field,
, for such solutions is absent and the hydrodynamic flow is not involved in the solution. Both regimes are the result of competition between electromigration. The solution does not depend on the coupling coefficient
and the Darcy number
; it is function of the potential drop
, the fixed charge
N and the Debye number
.
The system (
21)–(
33) can be transformed into a system of ordinary differential equations. For the all three layers, Equations (
21) can be integrated once. Taking into account boundary conditions (
27)–(
31), after long and tedious derivations this system was transformed into the following three equations,
Here index
refers to one of three layers, the fixed space charge in the electrolyte layers is absent,
,
and
are constants of integration. The boundary conditions (
24) and (
30) turn into the ones,
At the interfaces
and
function
and its first derivatives
and
are taken continuous; it follows from the original conditions (
30), which, in turn, are valid when permittivity of the membrane
and its diffusivity
are equal to the permittivity
and diffusivity
of the electrolyte, respectively.
Three different expansions in the Chebyshev series were exploited in the layers. Upon substitution of these series into Equation (
34) and into boundary conditions of their continuity and boundary conditions (
35), we obtained a system of nonlinear algebraic equations with respect to unknown coefficients of the expansion. Depending on the voltage
from 20 to 150 terms of the expansion were taken, so that the largest order of the nonlinear system was about 500 equations.
Our system of equations,
, can be considered as a system of parameterized, nonlinear algebraic equations,
where
is a vector of unknowns and the Debye number
, the voltage
, and the fixed charge
N are the parameters of the system. Newton’s method was used to solve Equation (
36). When the solution
for some parameters
was found, this solution was extended to the solution with close parameters, etc. The previous solution was taken as the initial approximation for the search for the next one and eventually to find the whole family. When
and its first derivatives were known, the ion concentrations
, the charge density
, the salt concentration
, and the ion fluxes
were readily found.
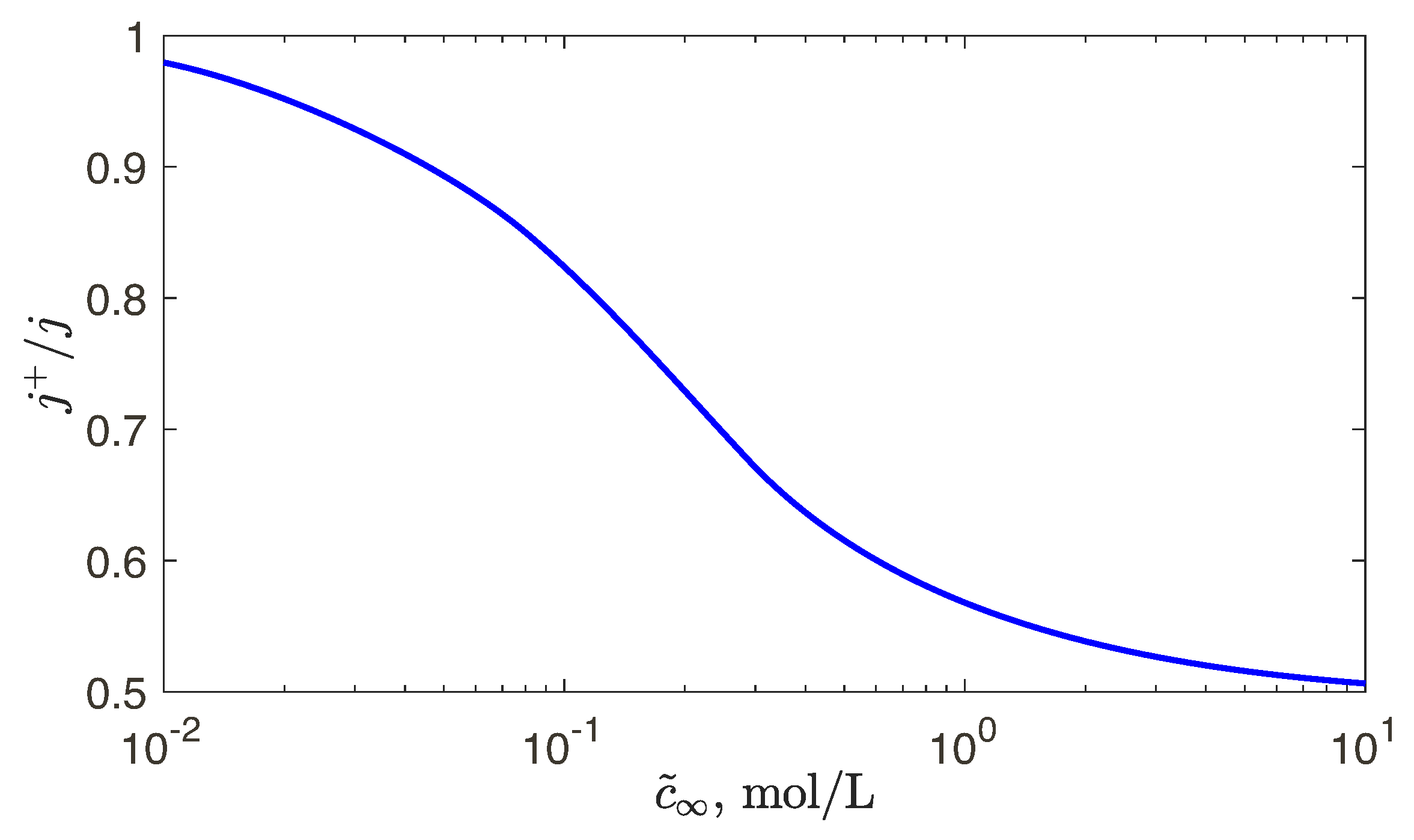
We begin our analysis with an important quantity, the selectivity of the membrane,
, which shows deviation from the perfect membrane with
and
. It was found that selectivity depends weakly on the voltage, but its dependence on the dimensionless fixed charge,
, is strong. For different standard membranes used in industry the dimensional fixed charge is always about 1 mol/L. Hence, it is instructive to plot the selectivity versus the bulk concentration
instead of
N. Such dependence for the Nafion 120 membrane is shown in
Figure 3. For low-concentration salt solutions,
mol/L, the membrane with a good accuracy can be assumed perfect. Increasing the bulk salt concentration decreases the selectivity significantly; for
mol/L it is only 0.5! Note that our numerical model allows to avoid painstaking experiments and, instead, seek selectivity theoretically.
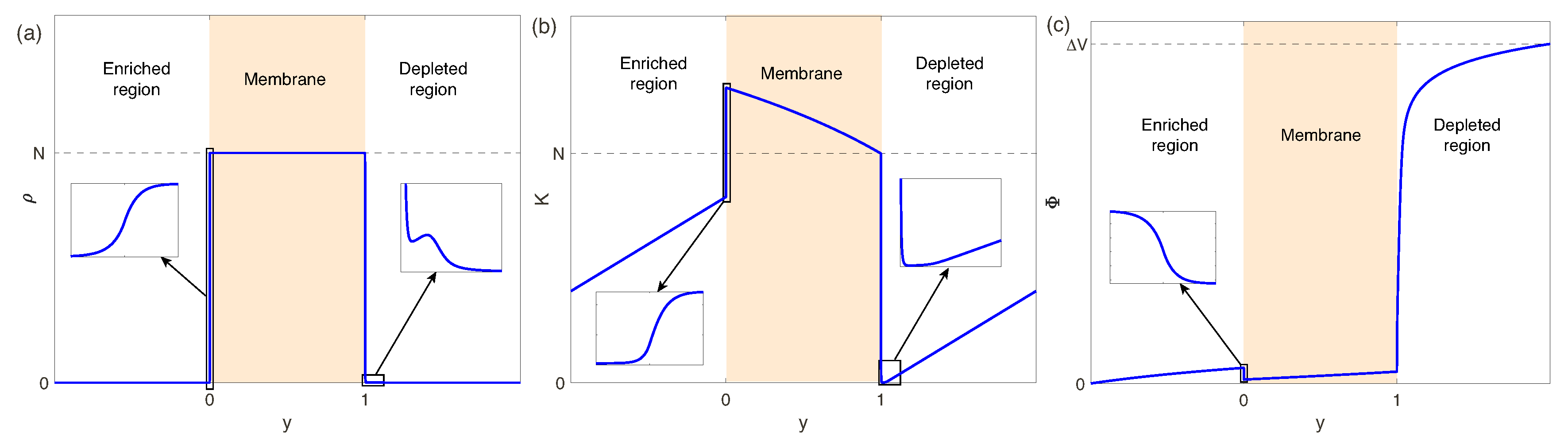
Consider detailed results for three different membranes with the fixed dimensionless charge density
N,
,
and
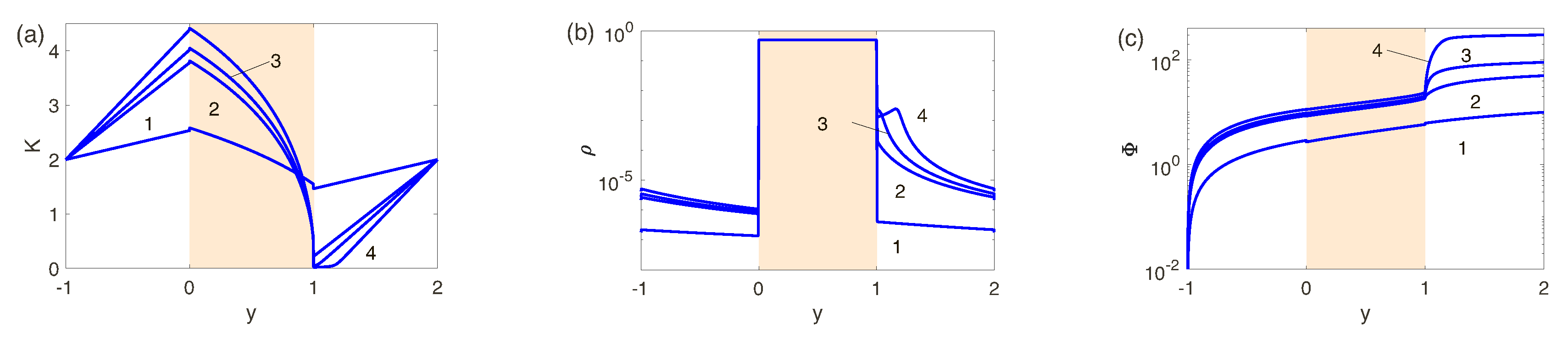
thus having characteristic ion-selectivities which are, respectively, close to perfect, intermediate and imperfect. In
Figure 4a–c the dependence of the salt concentration
K, the charge density
and the potential
on the spatial coordinate
y for
(perfect membranes or low-concentration electrolyte solutions)and four values of the voltage
are presented. Pay attention to the jumps in salt concentration, charge density, and potential when crossing the electrolyte-membrane interface for all
. This is characteristic of the Donnan enrichment/exclusion of membranes approaching perfectly ion-selective behavior. For the first values of
, 10 and 50, corresponds to the underlimiting current regime, where
and
K vary with distance practically linearly, excluding narrow
EDLs near phase interfaces. For the limiting current regime,
and 300, neither the behavior in the salt enriched region nor the porous membrane changes qualitatively. However, in the salt depleted region, the behavior of all the unknowns changes dramatically. For
K a zone of practically zero salt concentration appears near
, which expands as the potential difference
increases. In the
-profile, a maximum appears in the space charge which increases and departs from the membrane with increasing
. The potential distribution,
, along the membrane, shown in
Figure 4c, has its own distinctive features. The potential drop inside the nanoporous membrane is almost linear, i.e., obeying Ohm’s law. The potential change in the enriched solution region is relatively small due to its good electrical conductivity. In the case of limiting current regimes, a jump in potential both in the membrane and in the zone of an enriched solution can be neglected in comparison with a change of the potential in the zone of a depleted solution. This is due to the fact that in the last zone the electric conductivity tends to zero at
.
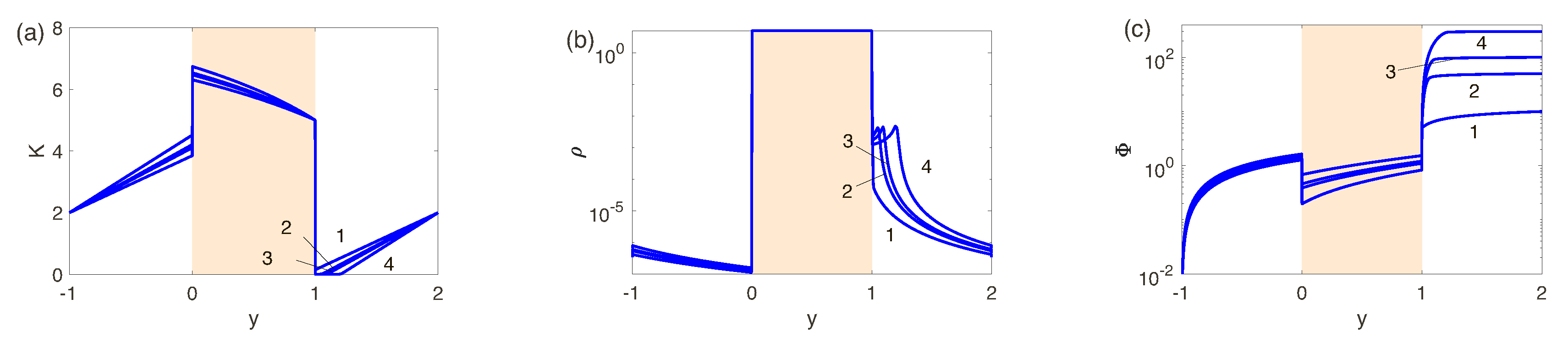
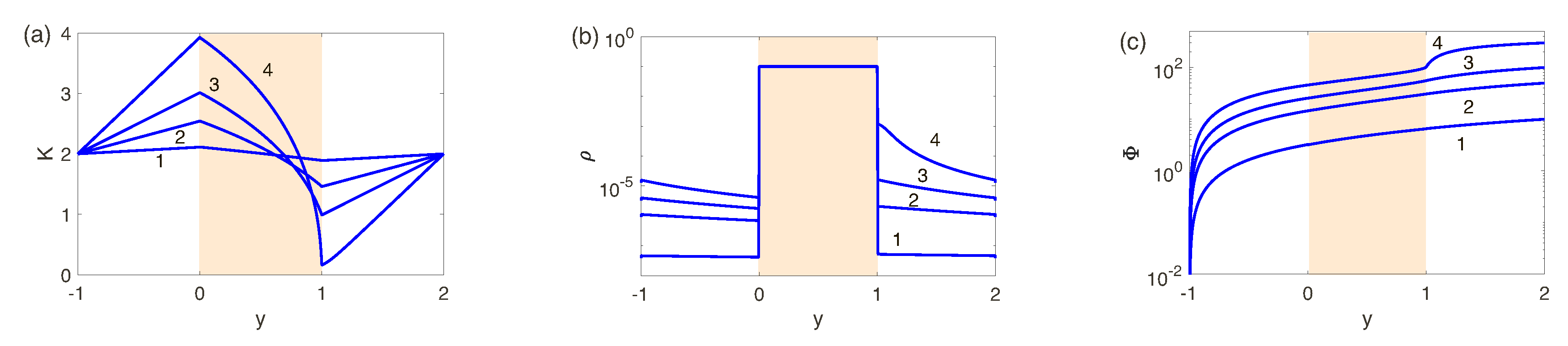
In
Figure 5a–c
,
and
for the intermediate value for the fixed charge,
, and four values of the voltage
are shown. Qualitatively, the behavior is similar outside the membrane. However, the exclusion/enrichment effect inside the membrane decreases with decreasing
N. Still, there is a small jump of the salt concentration
K in the EDL of the enriched electrolyte solution. As a consequence of the reduced selectivity, at
; the maximum of the charge in the
-distribution of the depleted region,
, does not appear until higher voltages and becomes less profound. The zone of depleted solution in
becomes smaller and
-distribution becomes smoother; specifically the transition between the membrane and the electrolyte near the interface
does not have a jump. The steep gradient at
remains, however, reduced in comparison to the perfect case due to the increased conductivity in the depleted region.
In
Figure 6a–c a smaller value of the fixed charge,
(high-concentration electrolyte solutions), is considered. The most astonishing difference between large and small N (or low-concentration and high-concentration solutions) lies in absence of the salt depleted region. In turn, the maximum of the space charge, typical for low-concentration solutions, disappears (compare
Figure 4a,b and
Figure 6a,b). As a result, the gradient of
on the coordinate
y in the depleted region decreases even further, see
Figure 6c. Summarizing, we can say that for the small
N (high-concentration electrolyte solutions) the difference between the underlimiting and limiting currents vanishes.
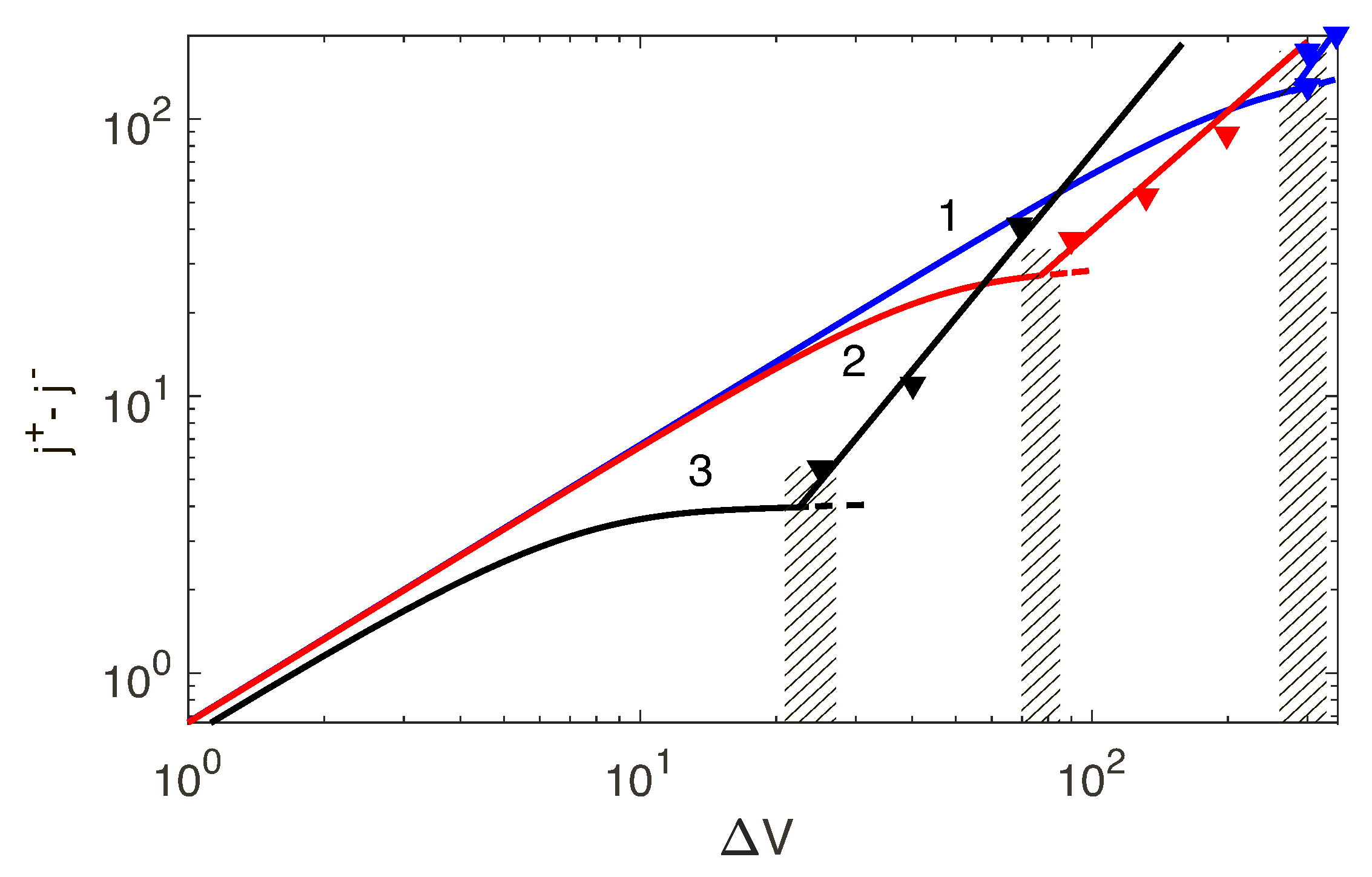
Let us consider this fact from the view point of the voltage-current characteristic; the VC-dependence for the different
, 0.5 and 5 is shown in
Figure 7. We point to a rather long segment of the limiting currents for
(low-concentration electrolyte solutions) and its practical absence for
; there is no difference between the underlimiting ang limiting regimes for the high-concentration electrolytes. This fact was theoretically pointed out in the work by Rubinstain and Zaltzman [
22]. We will return to this VC-characteristic in the next chapters.
3.2. Transition to the Overlimiting Currents
As was first discovered theoretically [
11,
12], the main reason for the transition to the overlimiting regimes is a special kind of electrohydrodynanic instability, the electrokinetic instability. In this subchapter, the transition to the overlimiting currents is considered from the viewpoint of classical linear stability theory. Assume that at some
the 1D quiescent steady-state solution, described by Equations (
34) and (
35), is disturbed by small sinusoidal perturbations,
with the wave number
k and the growth (decay) factor
. These perturbations trigger a hydrodynamic flow so that now the velocity components
and
are nonzero. The subscript 0 is related to the mean 1D solution, the ‘
’, to perturbations. Upon substitution into the system (
21)–(
33), then linearizing with respect to perturbations and omitting the subscript 0 in the mean solution, we get the following system,
which is an eigenvalue problem for
for a system of linear ordinary differential equations (ODEs). The coefficients of these equations depend on the solution of 1D problem (
34) and (
35). If real part of
for all wave numbers
k is negative, the 1D solution is stable; if real part of
is positive for at least one
k, the 1D solution is unstable and it gives the threshold of transition to the overlimiting currents.
The system has two small parameters before the highest order derivatives, the Debye number,
, in the Poisson equation and the Darcy number,
, in the Darcy–Brinkman equations. That is the very reason of creation of the thin boundary layers near the interfaces
and
. In view of the foregoing, in each of the three layers—the region of the depleted solution, the membrane, and the region of the enriched solution, discretization was performed by the Galerkin method, and the Chebyshev polynomials,
, were used as basis functions,
The length of each layer is 1. Since the Chebyshev polynomials are defined in the interval , the length of all three layers was doubled. The resolution of these polynomials increases as we approach the boundaries of the region; therefore, the Chebyshev polynomials ideally take into account the specifics of the problem. Individually, the Chebyshev polynomials do not satisfy the boundary conditions at the cathode and anode and the continuity conditions. Therefore, a -version of the Galerkin method was used.
The essence of the
-version is that the relations (
61) were substituted into the Equations (
38)–(
42), (
46)–(
53) and (
54)–(
59), and the condition of orthogonality was applied of the residual of the right-hand side of the equations. The last 22 conditions of orthogonality were excluded from the system and replaced by boundary conditions (
37), (
43)–(
45), (
51)–(
52) and (
60), where the Galerkin polynomials (
61) were also substituted. Eventually, the eigenvalue problem for the ODE system was replaced by a generalized algebraic eigenvalue problem of matrices, as it follows,
This problem was solved numerically by a standard -algorithm.The maximum dimension of the matrix reached 6000; we usually confined them to 2000.
The transition to the overlimiting currents is described by the following parameters: the voltage,
, the fixed charged density,
N, the Darcy number,
, and the Brinkman coefficient,
(we recall, that the Debye number and the coupling coefficient were fixed,
and
). The Brinkman coefficient
is determined by the texture properties of the nanoporous membranes and the size of its pores; this parameter varies from
to 1. Kuznetsov [
35] showed that the influence of this parameter is insignificant. However, in his formulation the electrodynamical effects are not involved. Following [
35], we also varied the parameter
in the above range, and found that the difference between solutions with
, 0 and
is less than
for all the studied modes. Physically, this effect can be explained as follows: (a) For large values of
N, the membrane is close to a perfect and, hence, the instability is dominated by the surface galvanosmotic slip velocity and must be independent of the membrane inner properties (see Ref. [
22,
23,
25]) and, in particular, of
. (b) In the case of small
N, the influence of the inner properties of the membrane as a whole becomes important. However, since for small
N the electroconvection is largely caused by the volumetric residual charge in the electrolyte layer rather than the electroosmotic slip velocity (see [
25]), again, influence of the inner properties of the membrane layer remains negligible. Hypothetically, the parameter
may be important for the equilibrium electrokinetic instability caused by the electroosmotic velocity, but such a regime was not found in the acceptable ranges of the parameters. Taking into account all this arguments, the results with
are presented below.
The discrete spectrum of eigenvalues
consists of both real and complex-conjugate eigenvalues. We will enumerate the eigenvalues according to their real part,
. When the first real eigenvalue
or the first pair of the complex-conjugate eigenvalues
crosses the imaginary axis of the complex
-plane, the 1D steady-state solution looses its stability and induces transition to the overlimiting currents. For large
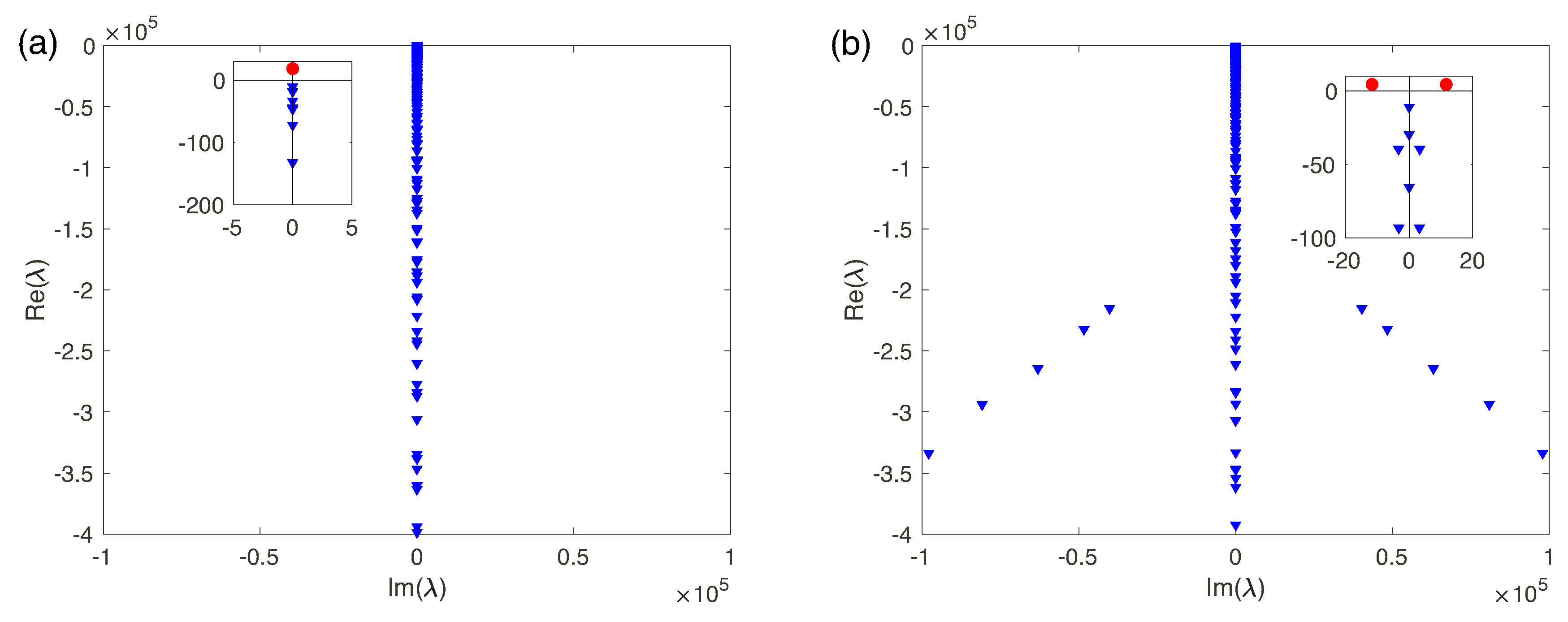
N, the membrane approaches the perfect case and the spectrum is real (see Ref. [
17]). In this case, the instability is monotonic. However, small
N corresponds to the complex-conjugate pairs of eigenvalues and, hence, instability is oscillatory (
Figure 8a,b, respectively). So, transition to the overlimiting regimes is realized through one of two scenarios:
Figure 8a the monotonic transition for a perfect membrane (low-concentration electrolyte solutions), or
Figure 8b the oscillatory one for the imperfect membranes (high-concentration electrolyte solutions).
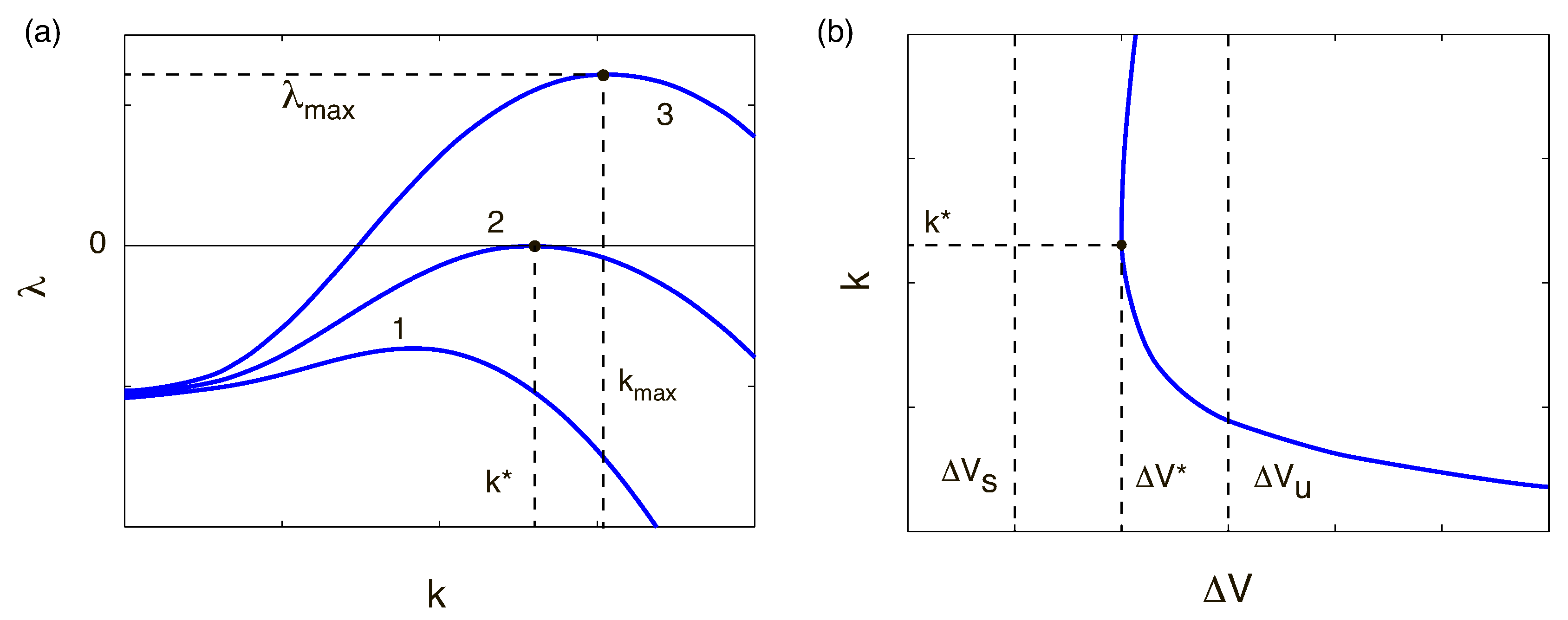
The instability and transition are connected with the largest eigenvalue,
. For stable
decays for all wave numbers; for the unstable
there is a window of unstable wave numbers with
; the for critical case
there is critical
with
, while all other wave numbers are stable,
for
. The critical value
gives the electrokinetic instability threshold and critical wave number
and the boundary between the one-dimensional underlimiting or limiting regimes and two-dimensional microvortex regime, see
Figure 9a,b.
Let us return to the VC-characteristics for the underlimiting and limiting currents from the previous chapter (
Figure 7), described by the 1D steady-state quiescent equilibria. The instability violates this state of equilibrium and leads to the ovelimiting regimes. While the one-dimensional equilibria do not depend on the hydromechanics of the process and thus on the Darcy number, the transition point
does in fact depend on it (see shaded areas in the Figure). The portion of the VC-characteristic for the supercritical voltage,
, can be described only by the direct numerical simulation of the problem in the full nonlinear formulation (
21)–(
33).
is a function of the fixed charge
N: (a) For sufficiently large
N,
N from 5 to 10, the membrane becomes practically perfect (low-concentration electrolyte solutions) and the critical voltage ceases to depend on
N. (b) For a small
N (high-concentration electrolyte solutions)
increases with decreasing of
N. An interesting feature of high-concentration electrolyte solutions is that the flat portion of the VC-characteristic, responsible for the limiting currents, disappears and transition to the overlimiting regimes happens right from the underlimiting regimes, thus bypassing the portion of the current saturation in the VC curve. This fact was first elucidated in the works [
22,
23] for a simplified solution for small
N.
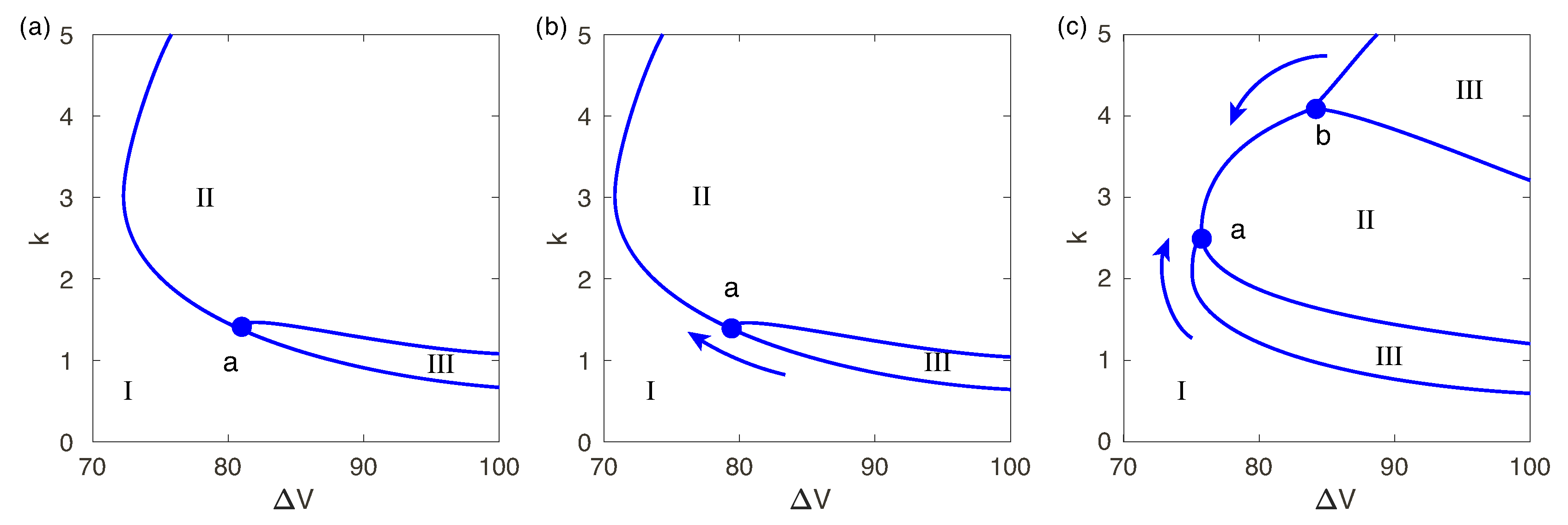
Marginal stability curves depend on the parameters
N and
in a rather sophisticated way. In
Figure 10a a typical marginal stability curve is shown for a small but nonzero
. For a small subcriticality there is only one unstable mode, region II. However, with increasing voltage a thin region III with a second unstable mode appears near the lower branch of the marginal curve (the long-wave mode). The left boundary of this region is determined by the point “a”. With increasing
-number, this point moves towards the nose of the stability curve. At the same time a point “b” on the upper branch of the stability curve appears; it characterizes an additional unstable region III which arises for the large wave numbers (the short-wave mode). As the Darcy number increases, both points move towards each other and merge at a critical voltage
, see
Figure 10b,c. With increasing of
N region III disappears, and the instability is governed by only one unstable real eigenvalue.
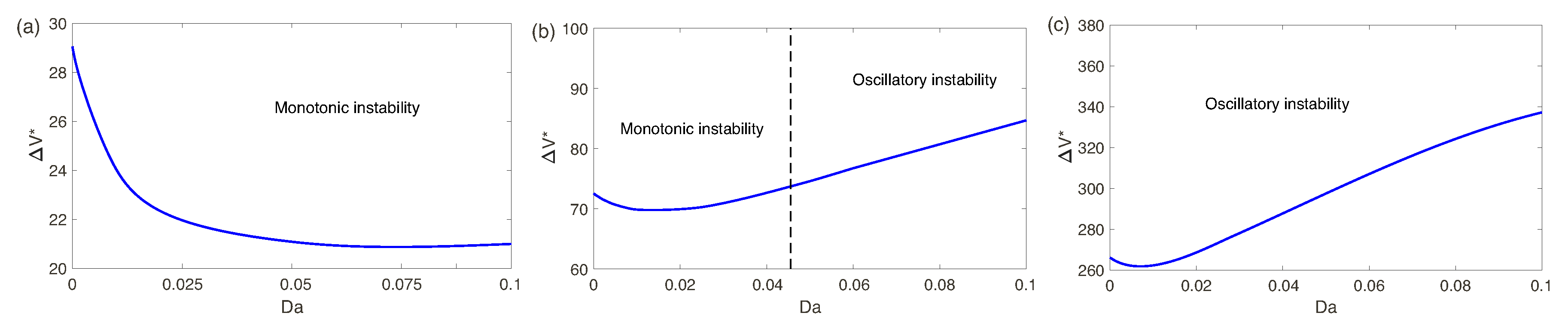
Dependence of the critical voltage
on both
N and
is shown in
Figure 11. The dependence of
on
is not monotonic; it has a minimum: at
at
, at
at
and at
at
. Existence of this minimum is connected with the fact of interplay of the short-wave and long-wave modes.
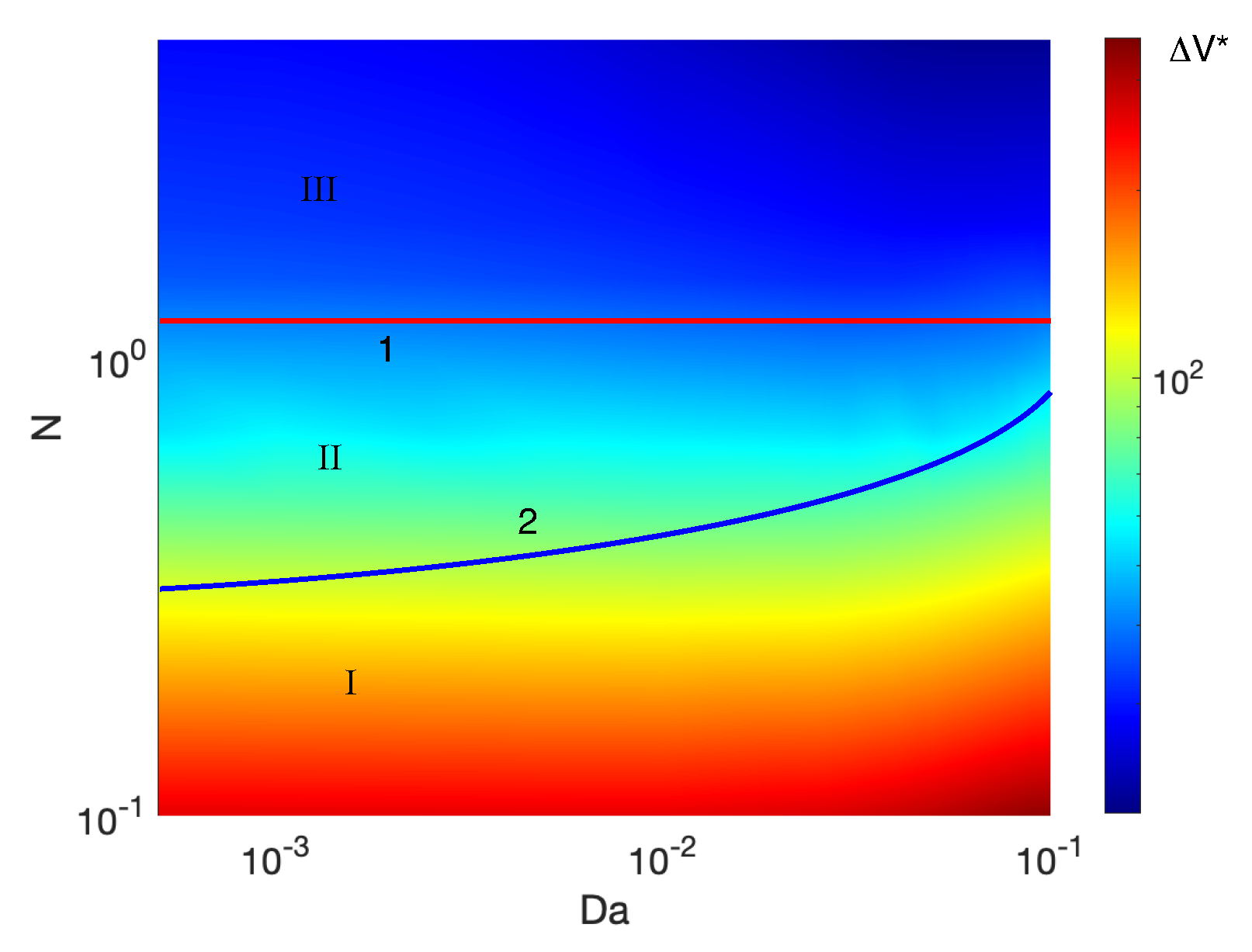
The results are summarized on the mode map,
Figure 12, where a composite dependence of
on
N and
is shown. The critical voltage is highlighted by the background color, see to the left of the map. The nonequilibrium instability is characteristic for the large
N (perfect membranes and low-concentration electrolyte solutions). The equilibrium instability begins to prevail with decreasing of
N (imperfect membranes and high-concentration electrolyte solutions). The critical voltage,
, is increasing with decreasing fixed charge
N. An increase in the Darcy number enhances the growth of critical voltage
. Instability is monotonic for perfect membranes and this fact is independent of the Darcy number. As the Darcy number increases, the transition region in
N between monotonic and oscillatory instabilities narrows.
3.3. Direct Numerical Sumulation of Well-Developed Overlimiting Regimes
In order to find numerical solutions of the full nonlinear system (
21)–(
33) for the developed overlimiting currents, the quasi-spectral discretization in space was used. With respect to the independent variable
x directed along the membrane, the unknown concentrations of anions and cations, the electric potential, and the velocity components in all three layers were represented as Fourier series:
where
k is a basic wave number for a characteristic length of the channel,
and
,
are the overtones. Therefore, for each layer,
one-dimensional unsteady problems for the each harmonic,
arise,
The problem in the membrane layer is now formulated as,
for zero harmonic,
,
and the Darcy–Brinkman equations turn into,
Then, for each function
, discretization by
y was carried out using the Galerkin method with the choice of Chebyshev’s polynomials
as basis functions. The
y-coordinate was stretched twice to be mapped to
,
Chebyshev’s polynomials are well suited to our problem, since they have an accumulation of zeros and therefore a high resolution near the Debye and Darcy layers. Substituting the finite Chebyshev series into the system (
63)–(
71) and using the Lanczos
method (see [
36,
37]) to satisfy the boundary conditions (
24)–(
30) leads to a system of coupled ODEs for the unknown Galerkin coefficients
and two systems of linear algebraic equations with respect to
and
for the each layer. To obtain these systems, all nonlinear algebraic operations are executed in physical space, in the collocation points, while derivatives with respect to both spatial variables
x and
y are calculated in the space of the Galerkin coefficients. Derivatives of the Chebyshev polynomials are calculated by means of the collocation matrix method (see [
36]). The connection between the collocation points and the Galerkin coefficients is performed by means of the fast Fourier transform.
A special method is developed to integrate the system in time. The numerical solution of the problem turned out to be very computationally costly. Therefore (a) the parallelization of the problem was applied on the Lomonosov supercomputer of the Moscow State University, (b) a special numerical scheme was used to discretize the problem in time. The second order Adams-Bashforth scheme for nonlinear terms along with the Crank-Nicholson scheme for linear terms were used in our work [
13] for the perfect one-layer membrane. In order to significantly accelerate the calculations this method was changed. The system of ODE’s with respect to
was integrated by the special third-order Runge-Kutta semi-implicit scheme adapted from the work [
38].
“Room disturbances” as conditions at
and initial stage of their evolution. At
electroneutrality conditions were used,
for the electrolyte layers and
in the membrane layer. These electroneutral conditions always contain small random (thermal) perturbations at a minimum. Sometimes they are called “room disturbances”. To mimic the initial small-amplitude broad-banded white noise the initial conditions are presented in the form,
which is consistent with the decomposition (
62). The amplitudes of these harmonics
are assumed to be small and their absolute value and phase
for the each harmonic
set by a random number generator uniformly distributed in the region
. The simulations were carried out for amplitude of the harmonic disturbance varying from
to
, with most at
. However, changing the amplitude did not change the results, but only the saturation time. Two basis wave numbers were taken; the rough calculations were done at
, but for more precise calculations
were taken. In particular
were taken for the evaluation of critical
and
. Only the ion transport equations contain time derivatives and, hence, require the initial conditions.
The initial evolution of the entire spectrum of small-amplitude harmonics is then described by the linear stability theory (see the previous Chapter). The amplitude of each harmonic
,
, for the stable wavenumbers is exponentially decaying, while for the unstable wavenumbers it is growing. As it follows from the linear stability theory, evolution of each harmonic takes place independently from each other and is described by the eigenvalue problem (
37)–(
60). For the critical conditions
there is a critical wave number
, for which the amplitude does not change in time. Amplitudes of all other harmonics,
, are exponentially decaying in time. Comparison between the linear stability theory and our direct numerical calculation is presented in
Figure 13 for two values of the fixed charge
N. According the linear theory
,
and
,
, while according to the DNS
and
,
. It shows reasonably good match between the linear stability theory and the direct numerical simulation of the full nonlinear system (
21)–(
33).
Typical evolution of the initial small-amplitude broad-banded white noise for a nonzero supercriticality
is shown in
Figure 14.
was taken as a basic wave number, so that the harmonics, involved in the calculation, were
with
. Evolution begins with a random distribution of the amplitudes of these harmonics versus the wave number,
. At
the linearly stable harmonics decayed. Amplitude of the linearly unstable harmonics, in the wave number window from 5 to 20, increased about 200 times. The amplitude of the “surviving” harmonics was still small and they continued to develop according to the linear stability theory, exponentially growing in time. At
the initial small-amplitude broad-banded white noise was filtered into practically monochromatic disturbances with a dominant wave number
, corresponded to the maximum growth rate
according to the linear theory.
Note, that the primary band focuses due to the filtering until the amplitudes of the disturbances are small. With amplitudes growing, the nonlinear effects began to corrupt this linear filtering. Overtone
and and zero-frequency bands appeared, as seen in the
Figure 14 at
. The exponential growth downstream was also saturated by this nonlinear interaction.
3.4. The Nonlinear Stage of Evolution
The next stages of evolution are nonlinear processes with eventual saturation of the disturbance amplitude. For a small supercriticality , the nonlinear saturation leads to steady periodic electroconvective vortices along the membrane surface. With increasing supercriticality the attractor can be described as a structure of periodically oscillating vortices. With a further increase in supercriticality, the behavior eventually becomes chaotic in time and space.
Established solutions are shown in
Figure 15,
Figure 16 and
Figure 17, where snapshots of the stream lines
are presented. All the calculations are for small supercriticalities
, so that the attractor at
is regular.
We begin the discussion with the simplest case of the perfect membranes (low-concentration electrolyte solutions) for different Darcy numbers and voltage, see
Figure 15a–c. According to the results of the linear stability analysis, the attractor corresponds to a pair of steady vorticies for all the Darcy numbers. For very small
,
Figure 15a, despite of strong instability and hydrodynamic movement in the depleted electrolyte layer, the membrane and enriched electrolyte layers practically do not react to it and velocity field in the regions
and
is rather weak. With the Darcy number increasing, see
Figure 15b,c, the character of the vortex pair in the depleted region does not change much, but even small increasing of
leads to a rise in the velocity field in the layers
and
, comparable with the one in the depleted region. With increasing of the supercriticality
, the regime of regular microvortices, through several secondary instabilities and transitions, changes to a chaotic regime. These instabilities and transitions qualitatively are the same, as described in Ref. [
17] for
. Eventually note, that the charge field,
, near the electrolyte -membrane interface
acquires a typical spike-like distribution with an angle at the apex of the spike about 120°, see Ref. [
17],
Figure 10 (the charge distribution is not presented in this work).
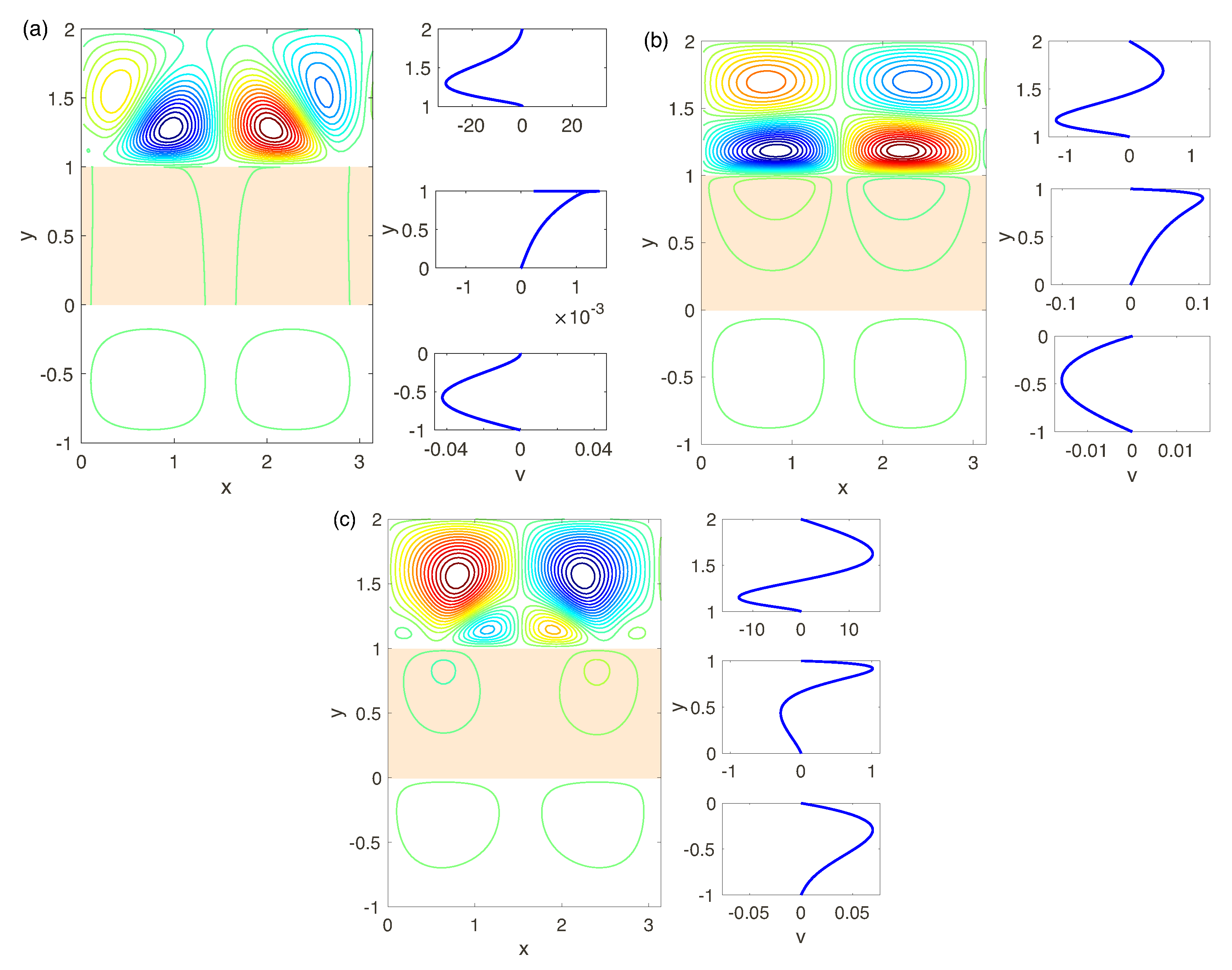
The results of the previous chapter on linear stability show the complex hydrodynamic behavior and, in particular, the appearance of several unstable modes and the change of the monotonic nature of the instability to the oscillatory one at decreasing of the fixed charge
N, see
Figure 11. The established regimes for
, for a small supercriticality
and different Darcy numbers are presented in
Figure 16. Again, for very small
the picture is similar with
and the attractor is a pair of steady vorticies,
Figure 16a. With increasing of
there is a possibility either of oscillatory or monotonic instabilities, see
Figure 16b,c. The velocity field in the electrolyte depleted region initiates the hydrodynamic movement in the membrane and the electrolyte enriched region. The latter has the same order of magnitude as in the layer
.
According to the linear analysis the stability for
is always oscillatory. The nonlinear direct numerical simulation confirms this fact. Its resalts are presented in
Figure 17. For all
the instability is caused by a complex-conjugate pair and is thus oscillatory. Several vortices appear in the depleted region,
, the complex behavior begins already for rather small supercriticality. With further very small increasing of
the dynamics becomes chaotic.
For sufficiently large , the hydrodynamics in all three regions (electrolyte/membrane /electrolyte) begin to be linked and the analysis presented above, which affects only the depleted zone of the electrolyte and the membrane region, while ignoring the enriched zone, ceases to adequately reflect the behavior of the system.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















