Underwater Sensor Networks and Internet of Underwater Things
(Closed)
A topical collection in Sensors (ISSN 1424-8220). This collection belongs to the section "Sensor Networks".
Viewed by 34509
Share This Topical Collection
Editors
 Dr. Jaime Lloret
Dr. Jaime Lloret
Dr. Jaime Lloret
E-Mail
Website
Collection Editor
Integrated Management Coastal Research Institute, Universitat Politecnica de Valencia, 46022 Valencia, Spain
Interests: network protocols; network algorithms; wireless sensor networks; ad hoc networks; multimedia streaming
Special Issues, Collections and Topics in MDPI journals
Topical Collection Information
Dear Colleagues,
Underwater wireless sensor networks (UWSNs) have been proposed as a way to observe and explore aquatic environments. They are gaining a lot of research interest lately due to their various applications, including environmental and pollution monitoring, disaster prevention, and assisted navigation. The Internet of Underwater Things (IoUT) is a part of the Internet of Things (IoT) composed of smart interconnected underwater objects. UWSN is an important feature that enables IoUT applications like marine transportation, smart oceans, emergency rescue and environmental protection, etc. Because of its environment nature, the implementation of such a system faces several challenges: the network topology (large number of needed nodes, connectivity and reliability, network protocols, etc.), limited energy and computation resources of the nodes/objects, low bandwidth capacity, security and data confidentiality, designing smart and autonomous devices dedicated to underwater environments, etc. The aim of this Topical Collection is to bring together academia and industrial researchers to present their recent research in the areas of UWSN and IoUT.
Prof. Dr. Abdallah Makhoul
Prof. Dr. Jaime Lloret
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Sensors is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2600 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- UWSN and IoUT system optimization and deployment techniques
- Smart underwater sensors, devices, and things
- Artificial intelligence and deep learning techniques for IoUT
- Underwater data sensing, mining, and dissemination
- Underwater localization and tracking
- UWSN and IoUT security and confidentiality
- Underwater communication and networking technologies
Published Papers (15 papers)
Open AccessArticle
Self-Adjustment Energy Efficient Redeployment Protocol for Underwater Sensor Networks
by
Saoucene Mahfoudh
Viewed by 609
Abstract
The diversity of applications supported by Underwater Sensor Networks (UWSNs) explains the success of this type of network and the increasing interest in exploiting and monitoring seas and oceans. One of the most important research fields is network deployment, since this deployment will
[...] Read more.
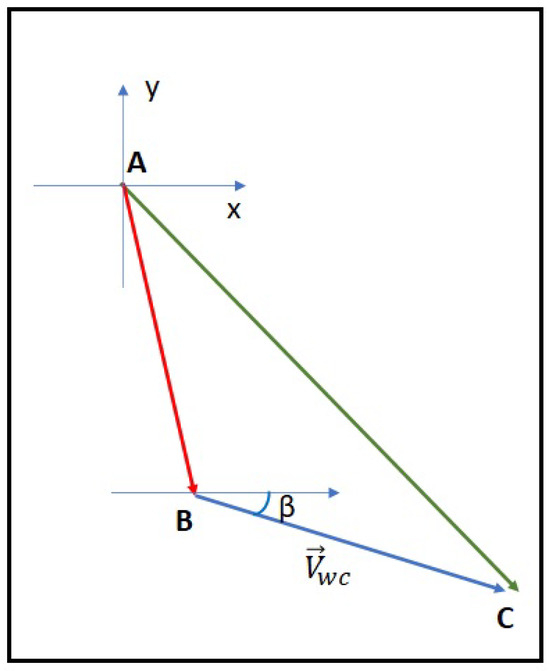
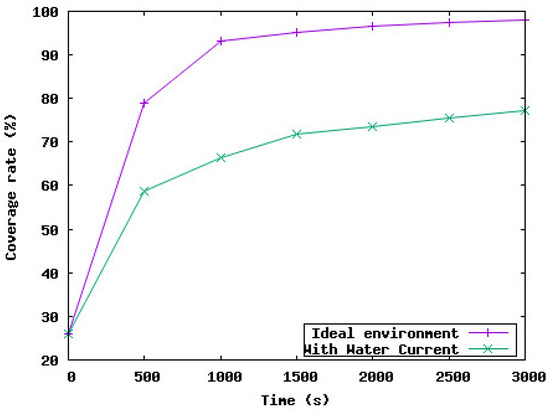
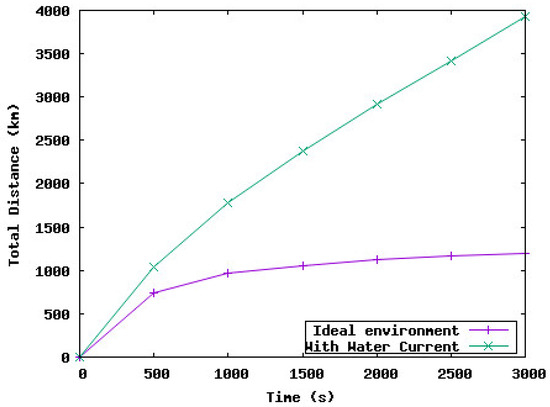
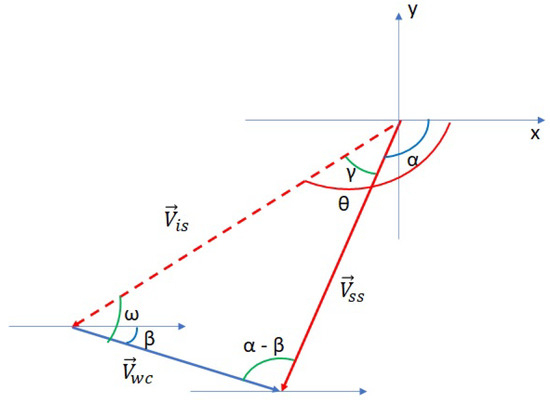
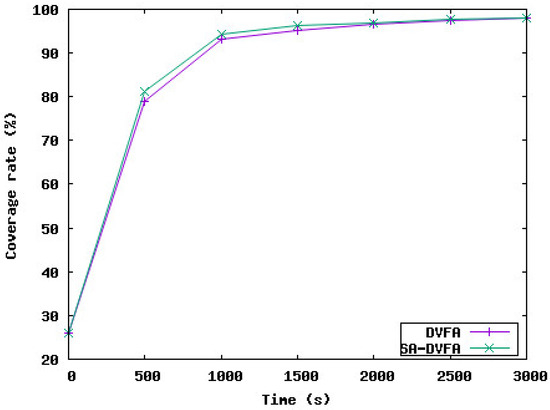
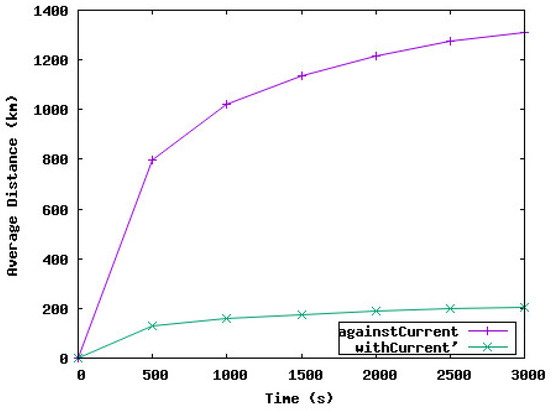
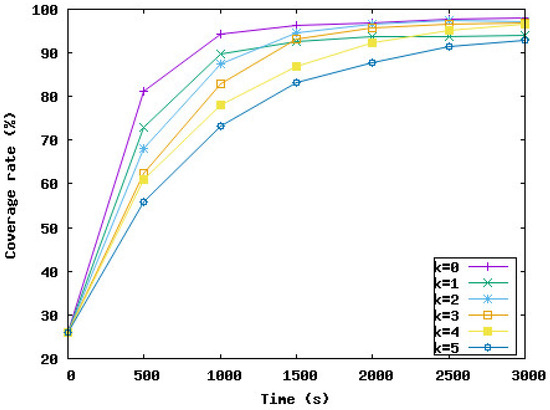
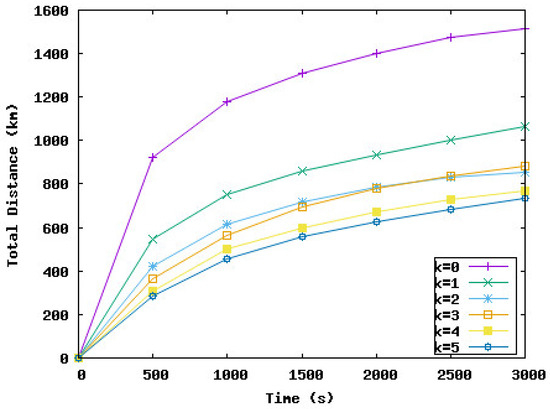
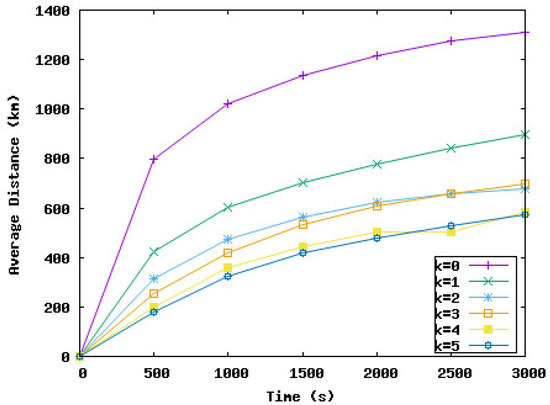
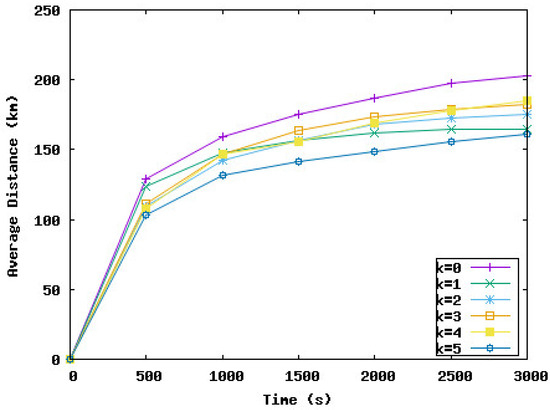
The diversity of applications supported by Underwater Sensor Networks (UWSNs) explains the success of this type of network and the increasing interest in exploiting and monitoring seas and oceans. One of the most important research fields is network deployment, since this deployment will affect all other research aspects in the UWSNs. Moreover, the initial random deployment resulting from scattering underwater sensor nodes on the network area’s surface does not ensure this area’s coverage and network connectivity. In this research, we propose a self-adjustment redeployment protocol that enhances network coverage and connectivity while reducing the energy consumed during network deployment. This protocol takes into account the peculiar dynamism of the underwater environment due to the water currents. First, we study the impact of these water currents on network deployment. Then, we exploit these water currents to adjust the nodes’ positions to achieve total area coverage and reduce the energy consumed during the deployment by reducing the total distance traveled by the underwater sensor nodes. Simulation results show that the proposed protocol achieves a very high coverage rate (97%) and reduces the distance traveled by nodes during the deployment by 41%.
Full article
►▼
Show Figures
Open AccessArticle
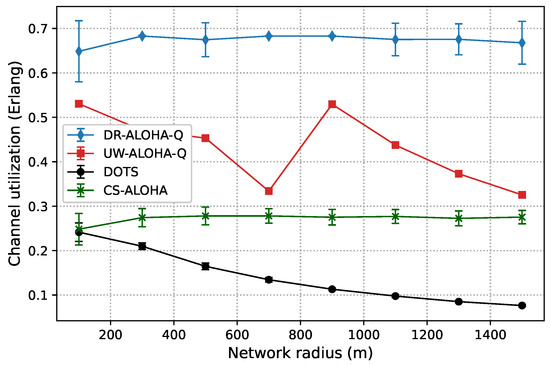
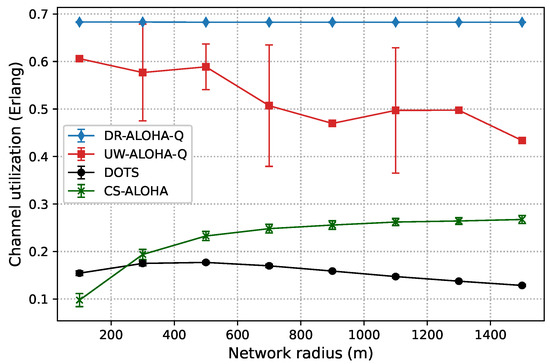
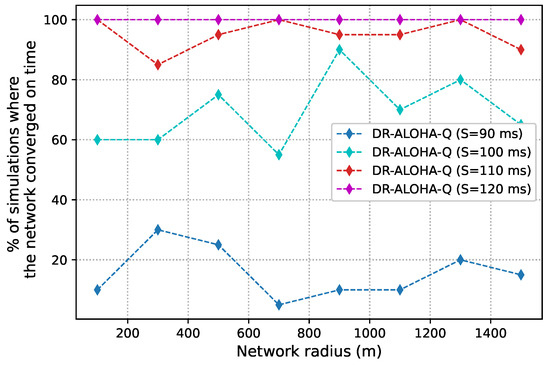
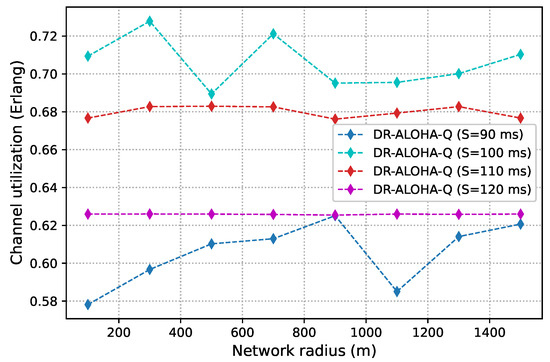
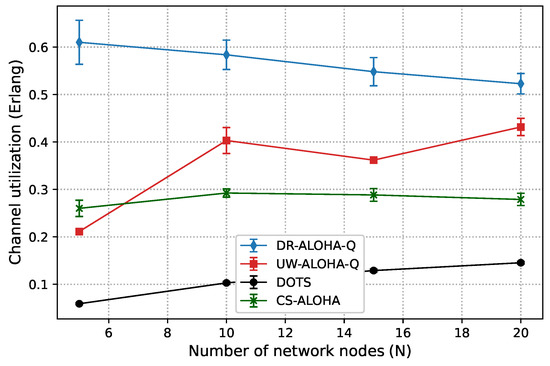
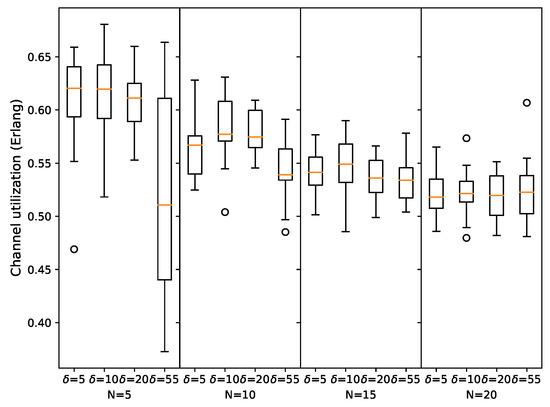
DR-ALOHA-Q: A Q-Learning-Based Adaptive MAC Protocol for Underwater Acoustic Sensor Networks
by
Slavica Tomovic and Igor Radusinovic
Cited by 3 | Viewed by 1631
Abstract
Underwater acoustic sensor networks (UASNs) are challenged by the dynamic nature of the underwater environment, large propagation delays, and global positioning system (GPS) signal unavailability, which make traditional medium access control (MAC) protocols less effective. These factors limit the channel utilization and performance
[...] Read more.
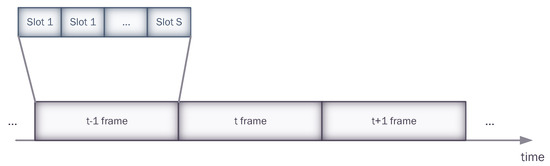
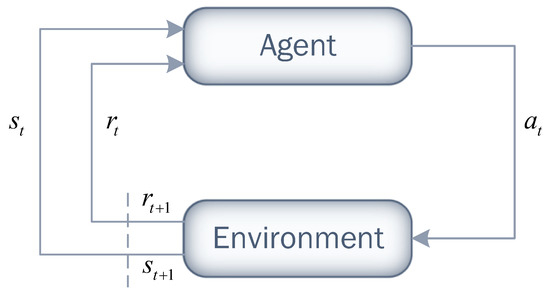
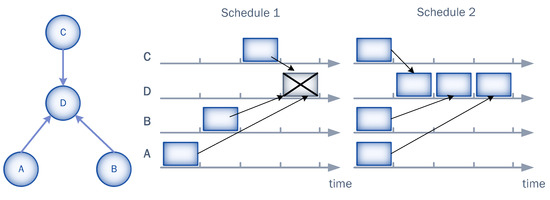
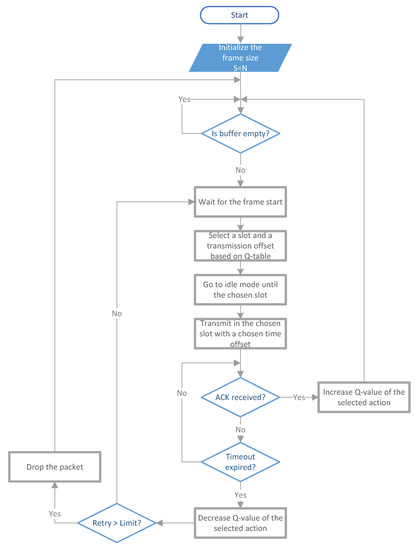
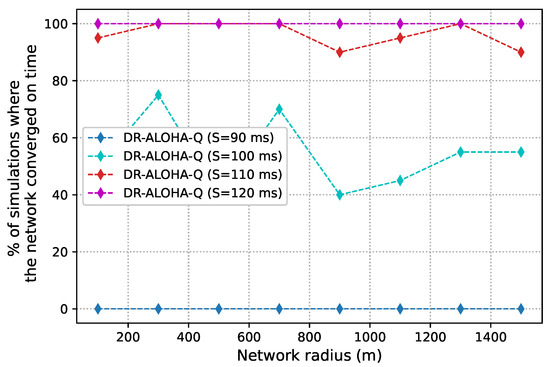
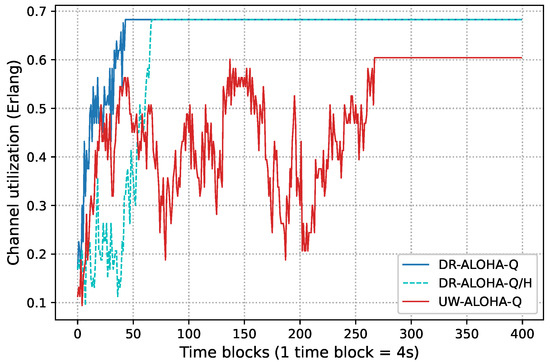
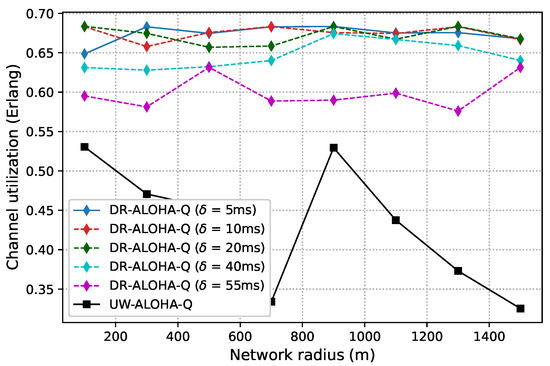
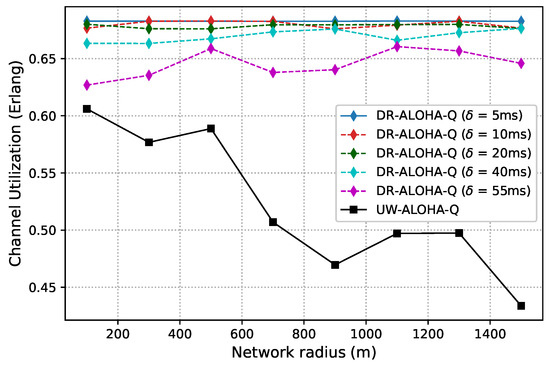
Underwater acoustic sensor networks (UASNs) are challenged by the dynamic nature of the underwater environment, large propagation delays, and global positioning system (GPS) signal unavailability, which make traditional medium access control (MAC) protocols less effective. These factors limit the channel utilization and performance of UASNs, making it difficult to achieve high data rates and handle congestion. To address these challenges, we propose a reinforcement learning (RL) MAC protocol that supports asynchronous network operation and leverages large propagation delays to improve the network throughput.he protocol is based on framed ALOHA and enables nodes to learn an optimal transmission strategy in a fully distributed manner without requiring detailed information about the external environment. The transmission strategy of sensor nodes is defined as a combination of time-slot and transmission-offset selection. By relying on the concept of learning through interaction with the environment, the proposed protocol enhances network resilience and adaptability. In both static and mobile network scenarios, it has been compared with the state-of-the-art framed ALOHA for the underwater environment (UW-ALOHA-Q), carrier-sensing ALOHA (CS-ALOHA), and delay-aware opportunistic transmission scheduling (DOTS) protocols. The simulation results show that the proposed solution leads to significant channel utilization gains, ranging from 13% to 106% in static network scenarios and from 23% to 126% in mobile network scenarios.oreover, using a more efficient learning strategy, it significantly reduces convergence time compared to UW-ALOHA-Q in larger networks, despite the increased action space.
Full article
►▼
Show Figures
Open AccessArticle
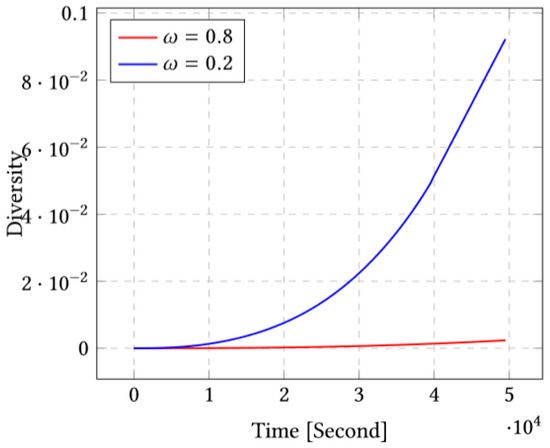
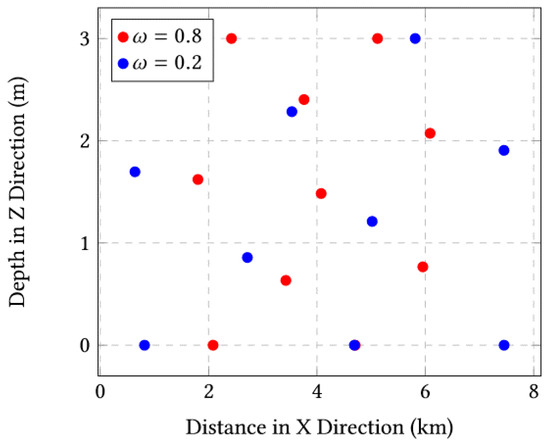
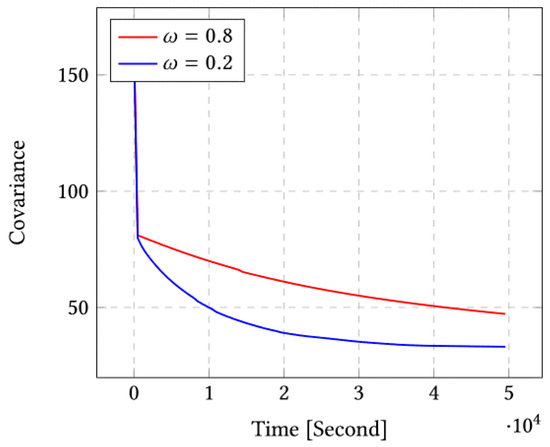
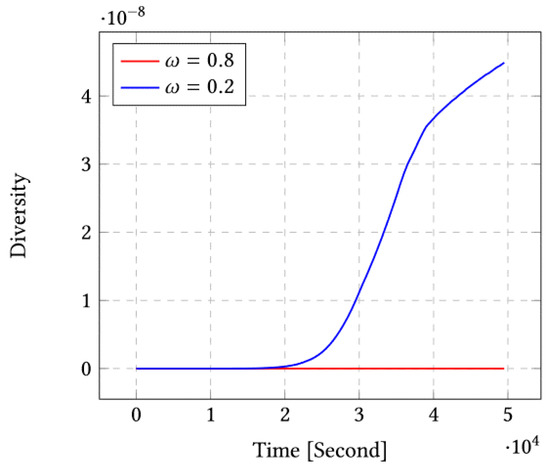
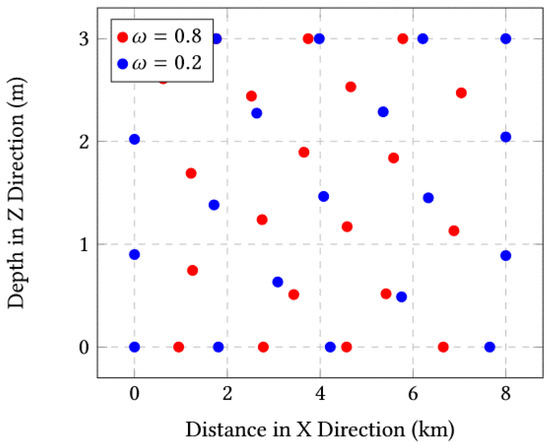
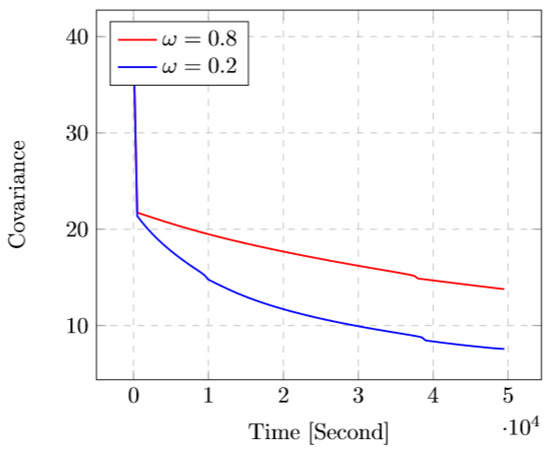
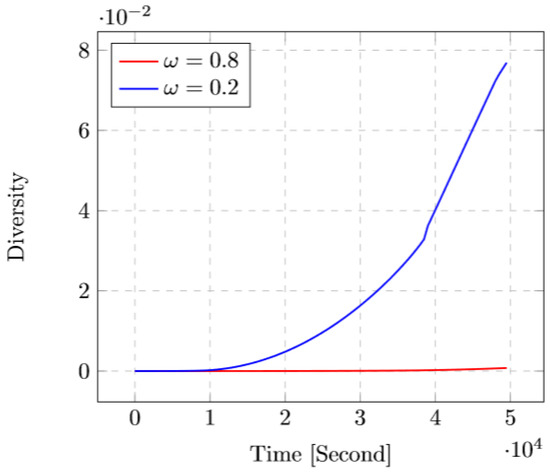
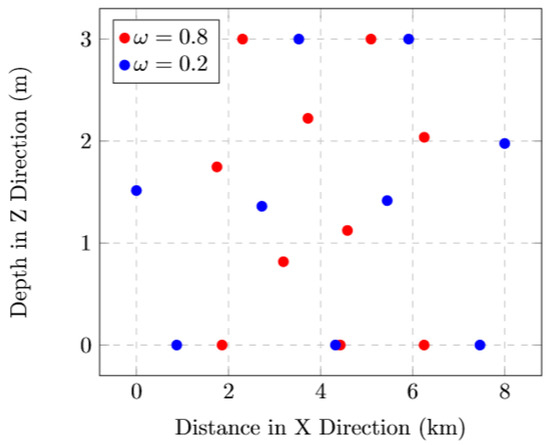
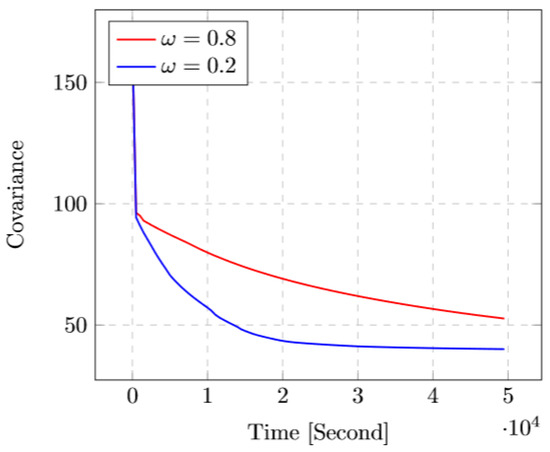
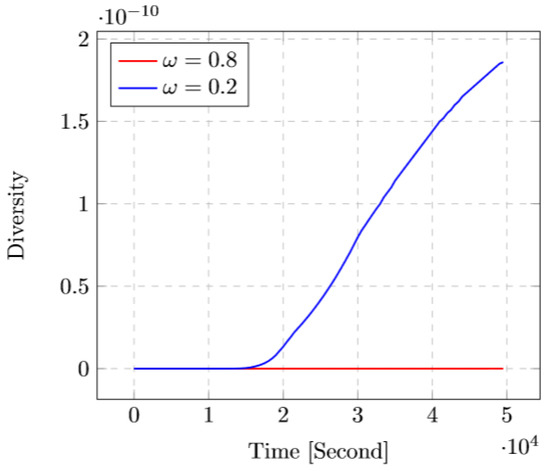
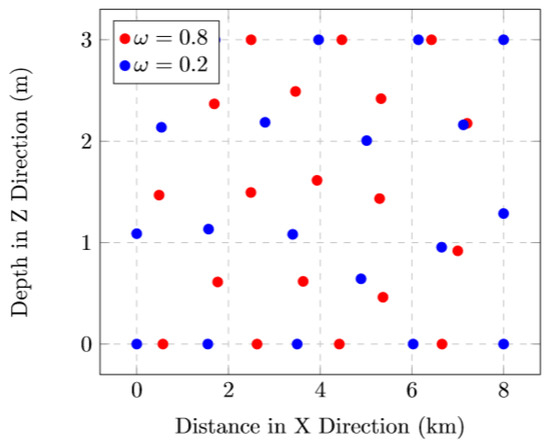
Quality of Monitoring Optimization in Underwater Sensor Networks through a Multiagent Diversity-Based Gradient Approach
by
Mohamed Ould-Elhassen Aoueileyine, Hajar Bennouri, Amine Berqia, Pedro G. Lind, Hårek Haugerud, Ondrej Krejcar, Ridha Bouallegue and Anis Yazidi
Cited by 1 | Viewed by 1687
Abstract
Due to the complex underwater environment, conventional measurement and sensing methods used for land are difficult to apply directly in the underwater environment. Especially for seabed topography, it is impossible to perform long-distance and accurate detection by electromagnetic waves. Therefore, various types of
[...] Read more.
Due to the complex underwater environment, conventional measurement and sensing methods used for land are difficult to apply directly in the underwater environment. Especially for seabed topography, it is impossible to perform long-distance and accurate detection by electromagnetic waves. Therefore, various types of acoustic and even optical sensing devices for underwater applications have been used. Equipped with submersibles, these underwater sensors can detect a wide underwater range accurately. In addition, the development of sensor technology will be modified and optimized according to the needs of ocean exploitation. In this paper, we propose a multiagent approach for optimizing the quality of monitoring (QoM) in underwater sensor networks. Our framework aspires to optimize the QoM by resorting to the machine learning concept of
diversity. We devise a multiagent optimization procedure which is able to both reduce the redundancy among the sensor readings and maximize the diversity in a distributed and adaptive manner. The mobile sensor positions are adjusted iteratively using a gradient type of updates. The overall framework is tested through simulations based on realistic environment conditions. The proposed approach is compared to other placement approaches and is found to achieve a higher QoM with a smaller number of sensors.
Full article
►▼
Show Figures
Open AccessArticle
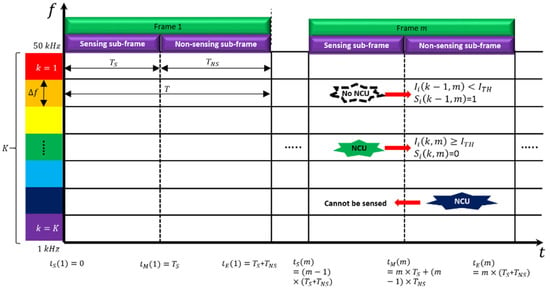
An Underwater Cooperative Spectrum Sharing Protocol for a Centralized Underwater Cognitive Acoustic Network
by
Changho Yun
Cited by 4 | Viewed by 1237
Abstract
To efficiently utilize nonexclusive underwater acoustic frequencies, we propose an Underwater Cooperative Spectrum Sharing (UCSS) protocol for a centralized underwater cognitive acoustic network that mainly consists of two parts. In the first part, to check the random occurrence of interferers periodically, the time
[...] Read more.
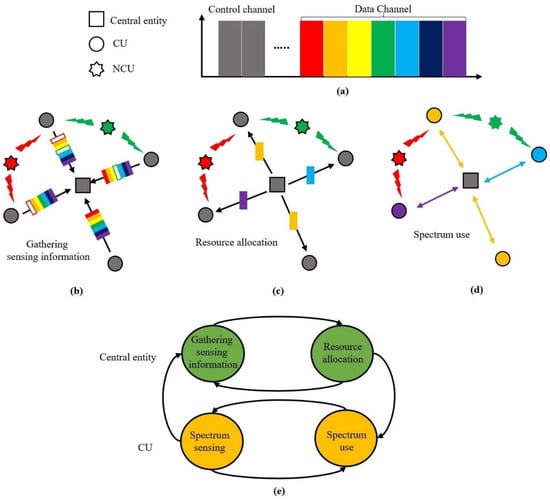
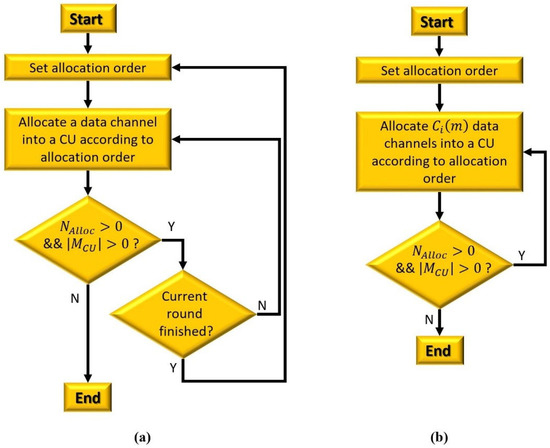
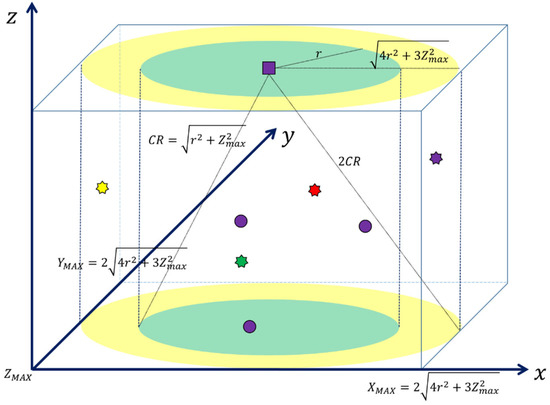
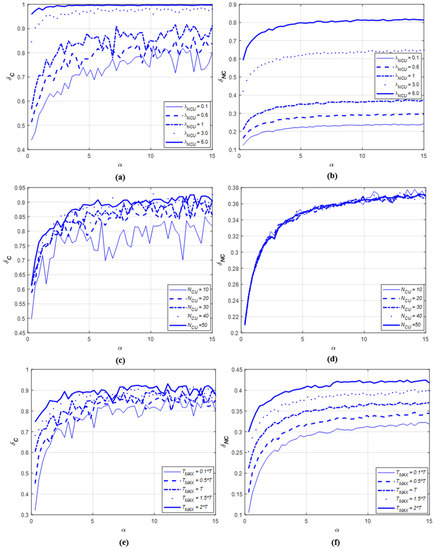
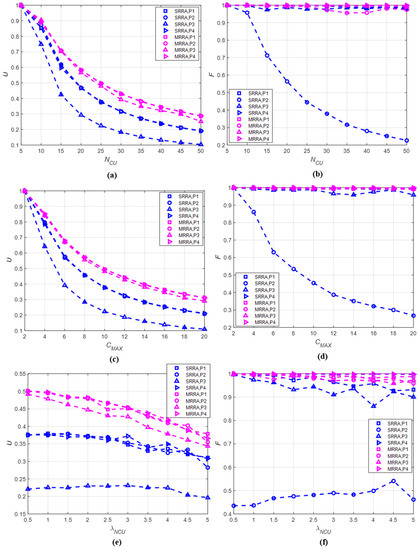
To efficiently utilize nonexclusive underwater acoustic frequencies, we propose an Underwater Cooperative Spectrum Sharing (UCSS) protocol for a centralized underwater cognitive acoustic network that mainly consists of two parts. In the first part, to check the random occurrence of interferers periodically, the time domain is divided into frames that consist of a sensing and a non-sensing sub-frame. Then, we set the ratio of the two sub-frames to enhance the sensing rate via simulations. As a result, there exists the upper limit of the ratio, which can be used for determining the proportion of the sensing time within a frame. The second part is to design two heuristic resource allocation (RA) algorithms. One is a multiround RA (MRRA), where a central entity allocates a data channel (i.e., resource) to a CU each round so that multiple rounds are executed until no CUs need to be allocated or there is a lack of data channels. The other is a single-round RA (SRRA), where a CU is allocated to as many data channels as its QoS within a round. We also specify four rules to determine the allocation order of the CUs: random, fixed, high-QoS-based, and low-channel allocation-rate-based. In this study, we investigate the best RA allocation order pair supporting the highest channel allocation rate and fairness index via extensive simulations. It is shown that the MRRA outperformed the SRRA, regardless of allocation orders at any conditions, and the random and low-channel allocation-rate-based allocation orders with MRRA supported the best performance. In particular, even without the optimization process, the MRRA guarantees more than 95% fairness.
Full article
►▼
Show Figures
Open AccessArticle
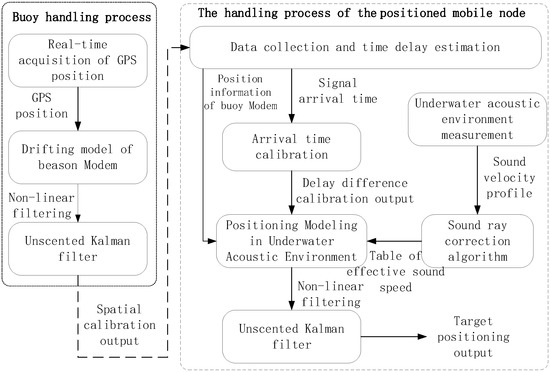
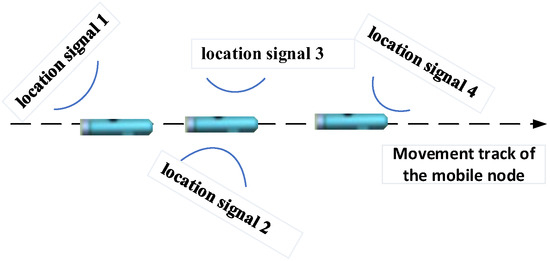
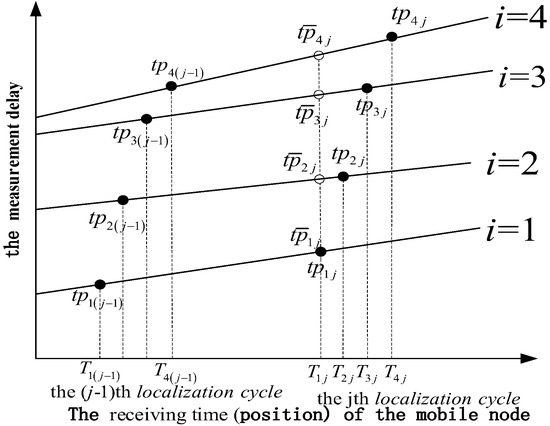
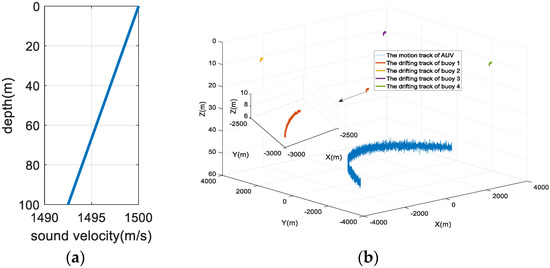
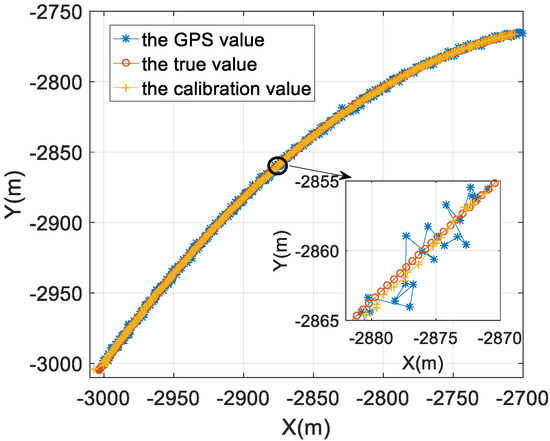
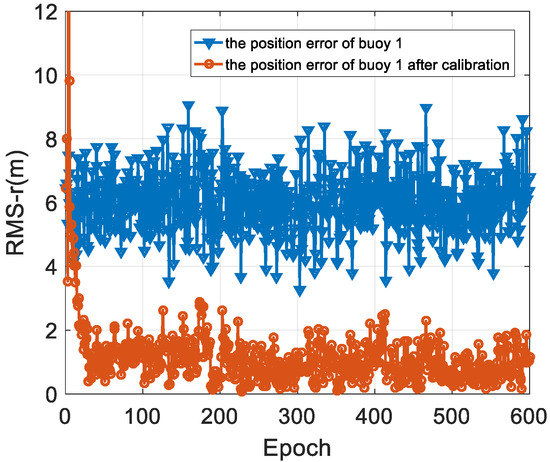
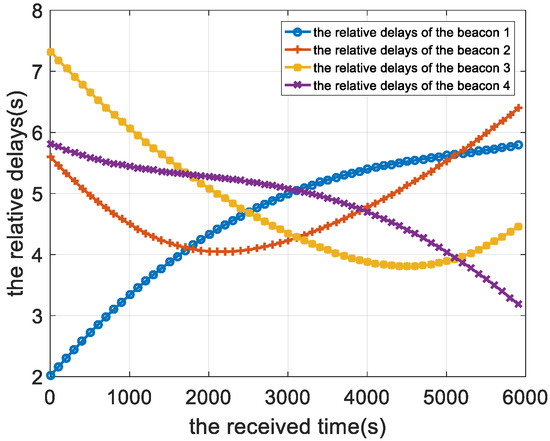
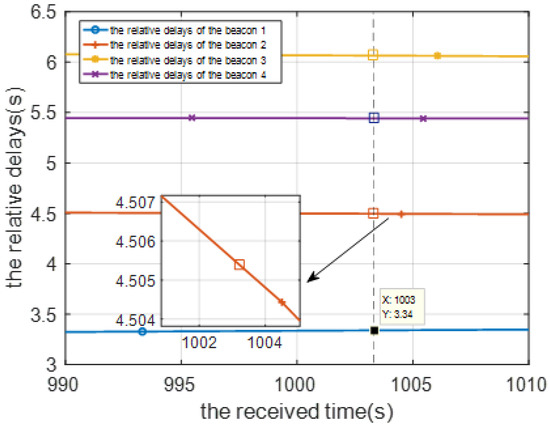
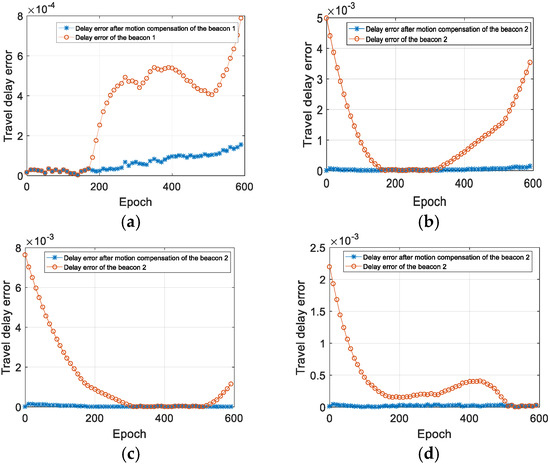
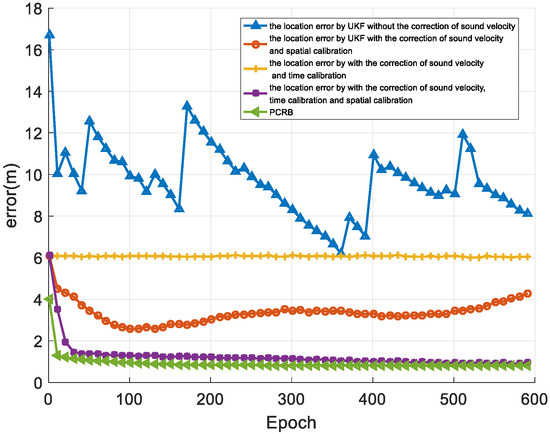
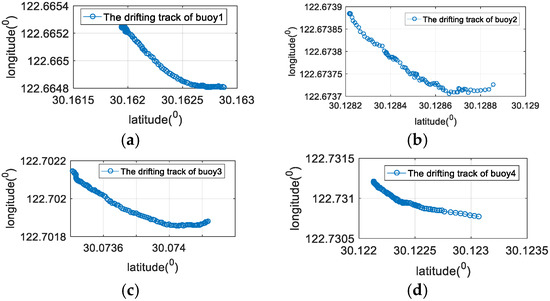
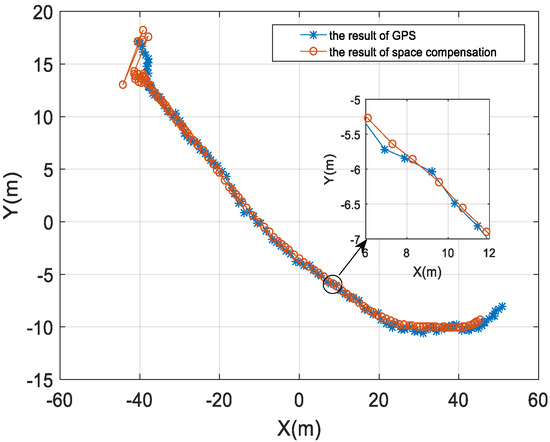
An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration
by
Chao Wang, Pengyu Du, Zhenduo Wang and Zhongkang Wang
Viewed by 1563
Abstract
The emergence of underwater acoustic networks has greatly improved the potential capabilities of marine environment detection. In underwater acoustic network applications, node location is a basic and important task, and node location information is the guarantee for the completion of various underwater tasks.
[...] Read more.
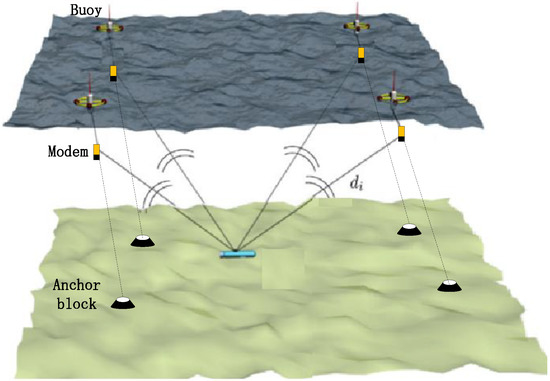
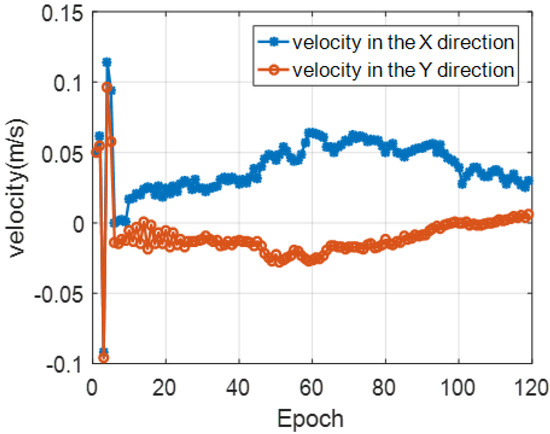
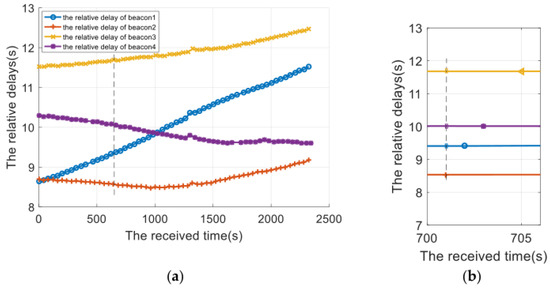
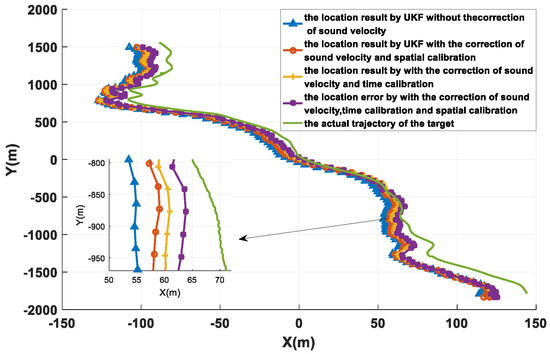
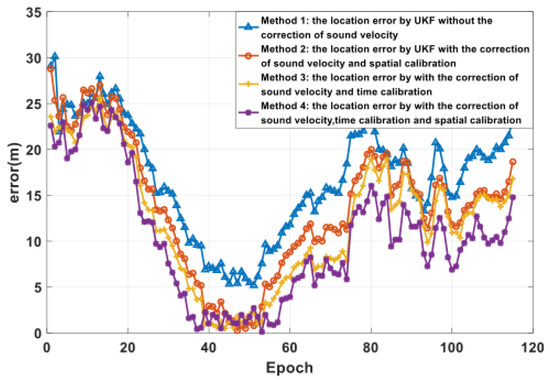
The emergence of underwater acoustic networks has greatly improved the potential capabilities of marine environment detection. In underwater acoustic network applications, node location is a basic and important task, and node location information is the guarantee for the completion of various underwater tasks. Most of the current underwater positioning models do not consider the influence of the uneven underwater medium or the uncertainty of the position of the network beacon modem, which will reduce the accuracy of the positioning results. This paper proposes an underwater acoustic network positioning method based on spatial-temporal self-calibration. This method can automatically calibrate the space position of the beacon modem using only the GPS position and depth sensor information obtained in real-time. Under the asynchronous system, the influence of the inhomogeneity of the underwater medium is analyzed, and the unscented Kalman algorithm is used to estimate the position of underwater mobile nodes. Finally, the effectiveness of this method is verified by simulation and sea trials.
Full article
►▼
Show Figures
Open AccessArticle
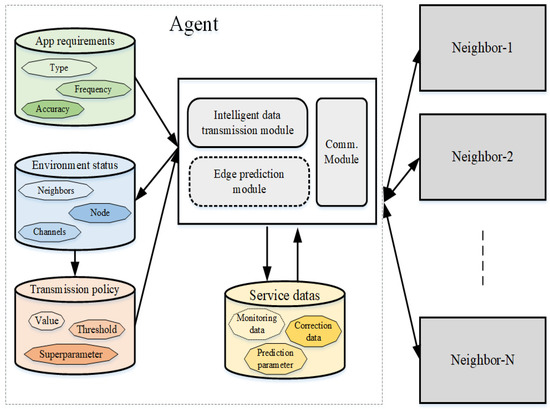
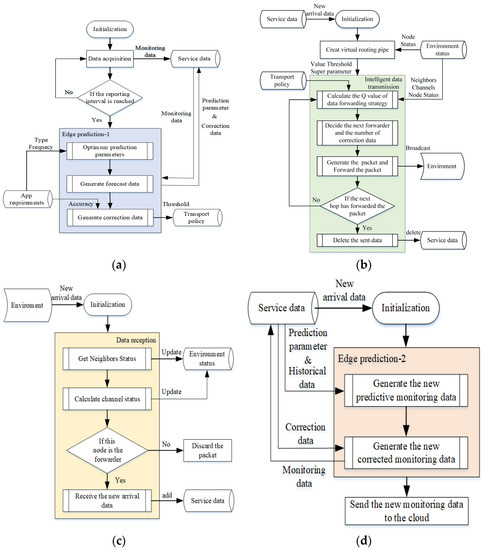
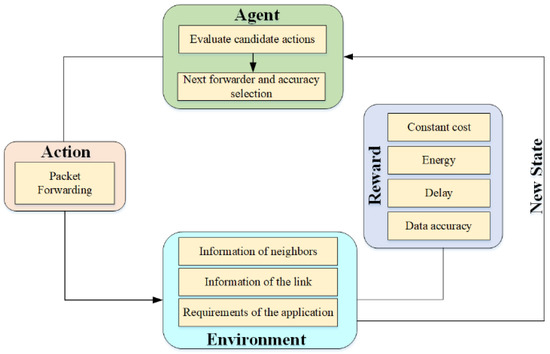
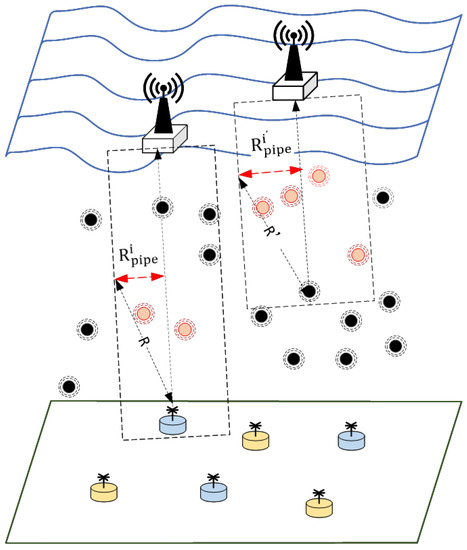
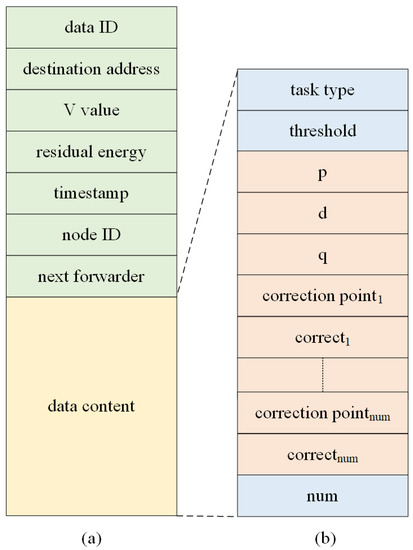
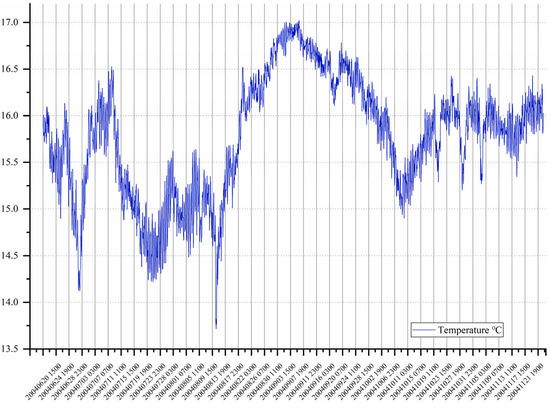
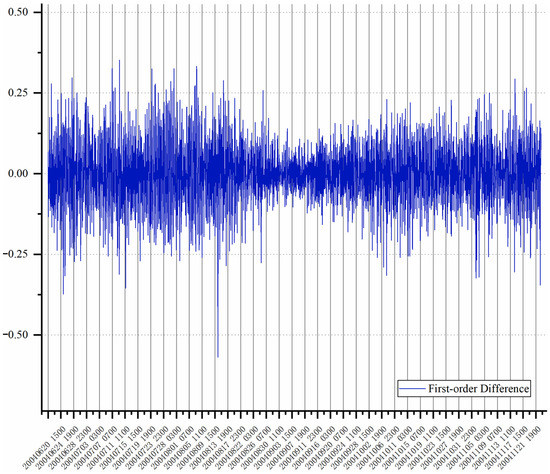
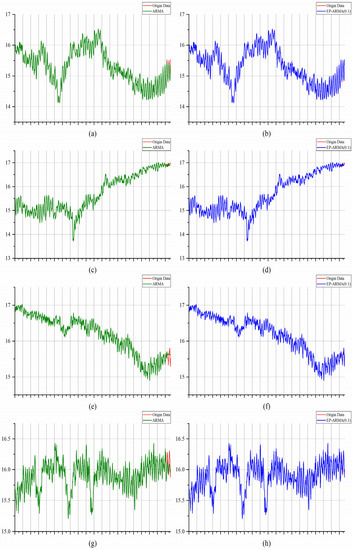
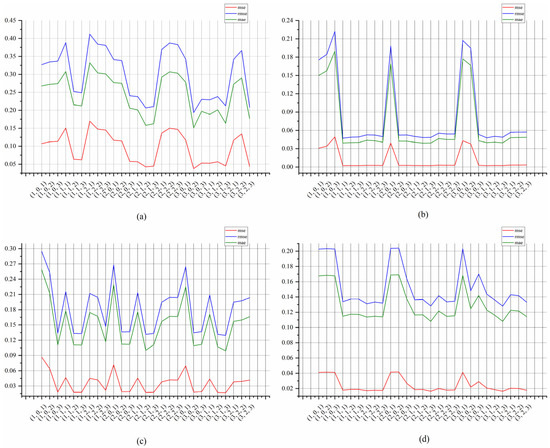
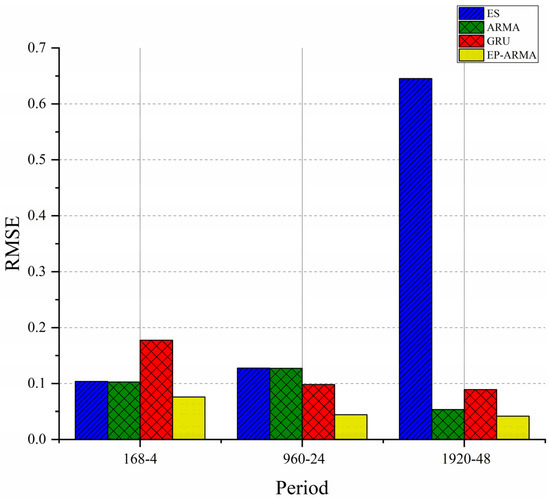
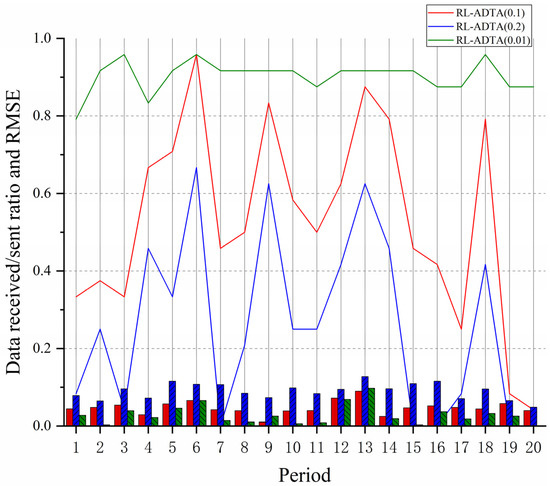
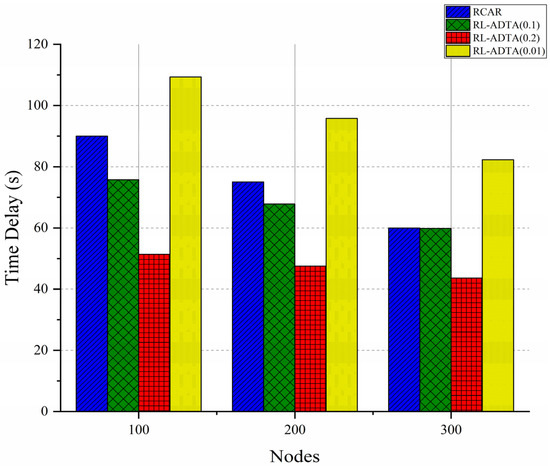
EP-ADTA: Edge Prediction-Based Adaptive Data Transfer Algorithm for Underwater Wireless Sensor Networks (UWSNs)
by
Bin Wang, Kerong Ben, Haitao Lin, Mingjiu Zuo and Fengchen Zhang
Cited by 5 | Viewed by 1629
Abstract
The underwater wireless sensor network is an important component of the underwater three-dimensional monitoring system. Due to the high bit error rate, high delay, low bandwidth, limited energy, and high dynamic of underwater networks, it is very difficult to realize efficient and reliable
[...] Read more.
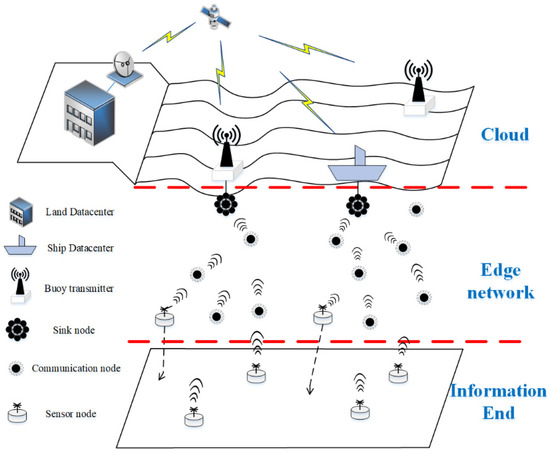
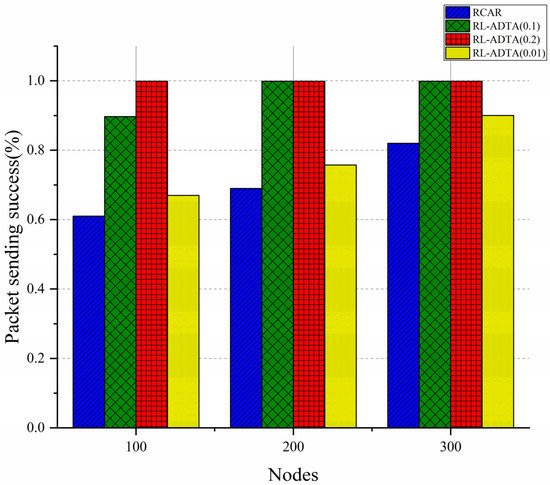
The underwater wireless sensor network is an important component of the underwater three-dimensional monitoring system. Due to the high bit error rate, high delay, low bandwidth, limited energy, and high dynamic of underwater networks, it is very difficult to realize efficient and reliable data transmission. Therefore, this paper posits that it is not enough to design the routing algorithm only from the perspective of the transmission environment; the comprehensive design of the data transmission algorithm should also be combined with the application. An edge prediction-based adaptive data transmission algorithm (EP-ADTA) is proposed that can dynamically adapt to the needs of underwater monitoring applications and the changes in the transmission environment. EP-ADTA uses the end–edge–cloud architecture to define the underwater wireless sensor networks. The algorithm uses communication nodes as the agents, realizes the monitoring data prediction and compression according to the edge prediction, dynamically selects the transmission route, and controls the data transmission accuracy based on reinforcement learning. The simulation results show that EP-ADTA can meet the accuracy requirements of underwater monitoring applications, dynamically adapt to the changes in the transmission environment, and ensure efficient and reliable data transmission in underwater wireless sensor networks.
Full article
►▼
Show Figures
Open AccessArticle
A Study of Standardizing Frequencies Using Channel Raster for Underwater Wireless Acoustic Sensor Networks
by
Changho Yun and Suhan Choi
Cited by 2 | Viewed by 2069
Abstract
In this paper, we propose the method to standardize acoustic frequencies for underwater wireless acoustic sensor networks (UWASNs) by applying the channel raster used in the terrestrial mobile communications. The standardization process includes: (1) Setting the available acoustic frequency band where a channel
[...] Read more.
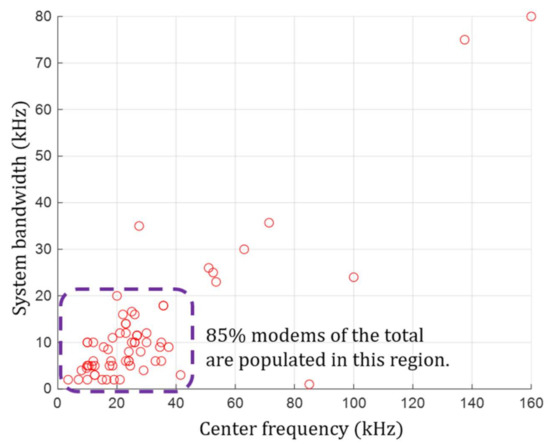
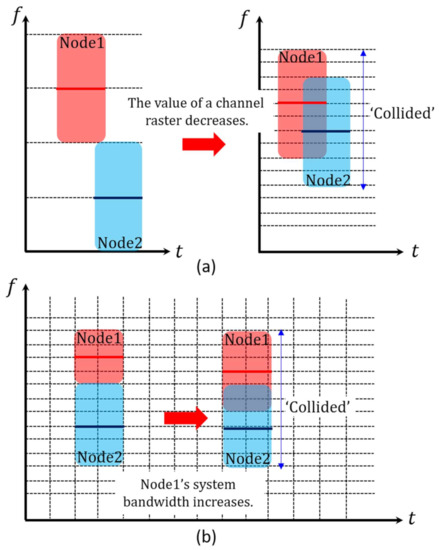
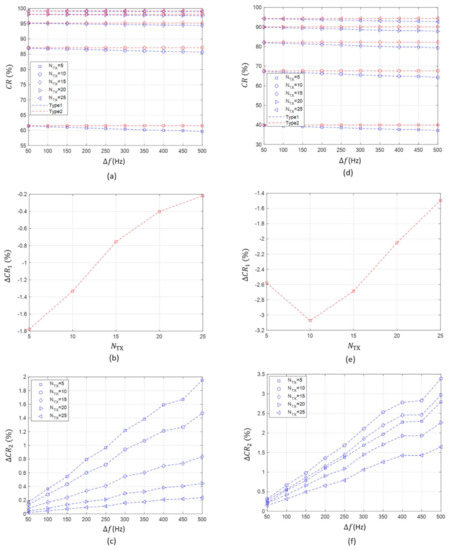
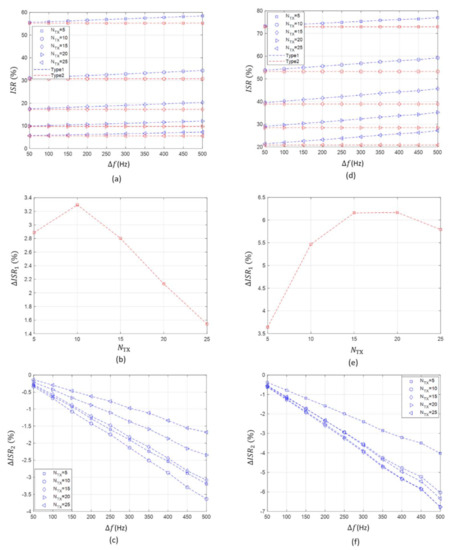
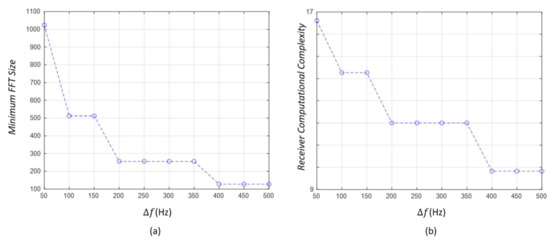
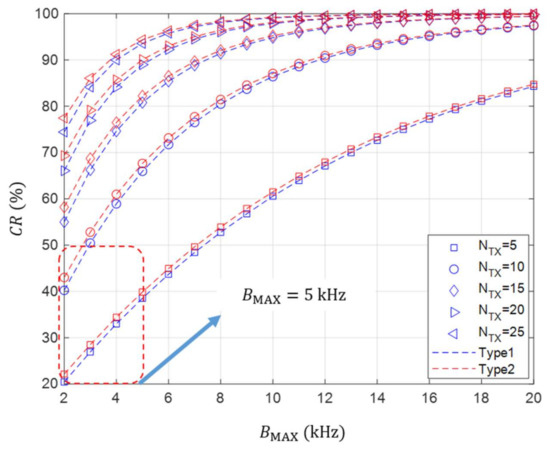
In this paper, we propose the method to standardize acoustic frequencies for underwater wireless acoustic sensor networks (UWASNs) by applying the channel raster used in the terrestrial mobile communications. The standardization process includes: (1) Setting the available acoustic frequency band where a channel raster is employed via the frequency specification analysis of the state-of-the art underwater acoustic communication modems. (2) Defining the center frequencies and the channel numbers as a function of channel raster, and the upper limit of the value of channel raster. (3) Determining the value of the channel raster suitable for the available acoustic frequency band via simulations. To set the value, three performance metrics are considered: the collision rate, the idle spectrum rate, and the receiver computational complexity. The simulation results show that the collision rate and the idle spectrum rate according to the value of channel raster have a trade-off relationship, but the influence of channel raster on the two performance metrics is insignificant. However, the receiver computational complexity is enhanced remarkably as the value of channel raster increases. Therefore, setting the value of channel raster close to its upper limit is the most adequate in respect of mitigating the occurrence of a collision and enhancing the reception performance. The standardized frequencies based on channel raster can guarantee the frequency compatibility required for the emerging technologies like the Internet of Underwater Things (IoUT) or the underwater cognitive radio, but also improves the network performance by avoiding the arbitrary use of frequencies.
Full article
►▼
Show Figures
Open AccessArticle
A New Method for Gaining the Control of Standalone Underwater Sensor Nodes Based on Power Supply Sensing
by
Daniel Rodríguez García, Juan A. Montiel-Nelson, Tomás Bautista and Javier Sosa
Cited by 3 | Viewed by 2060
Abstract
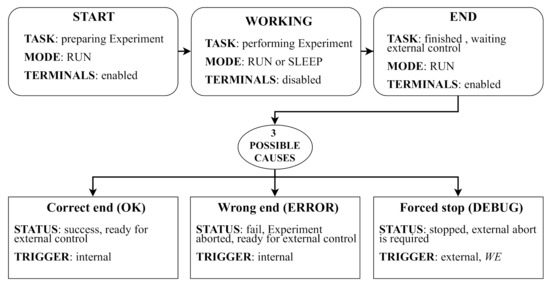
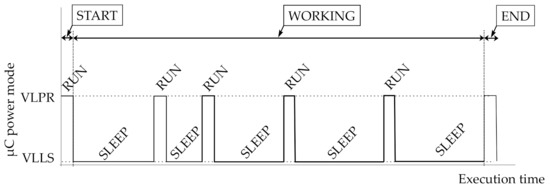
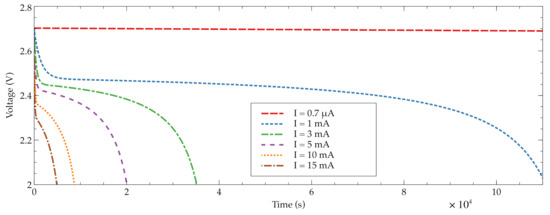
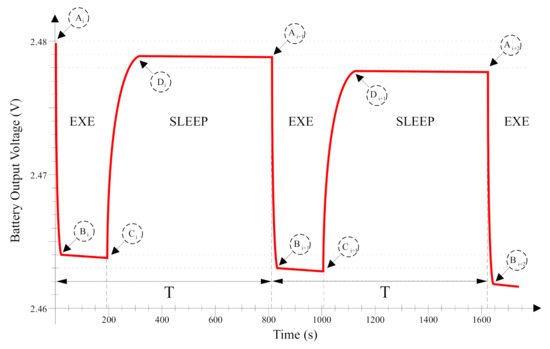
In this paper, a new method for gaining the control of standalone underwater sensor nodes based on sensing the power supply evolution is presented. Underwater sensor networks are designed to support multiple extreme scenarios such as network disconnections. In those cases, the sensor
[...] Read more.
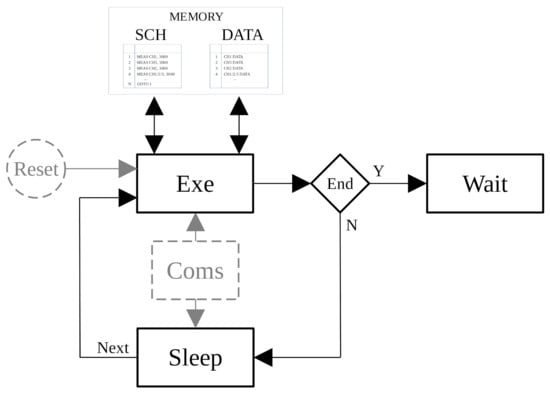
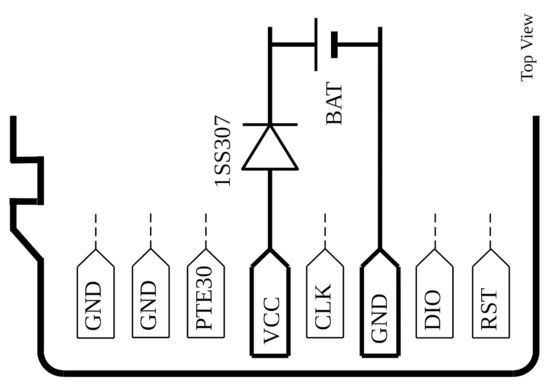
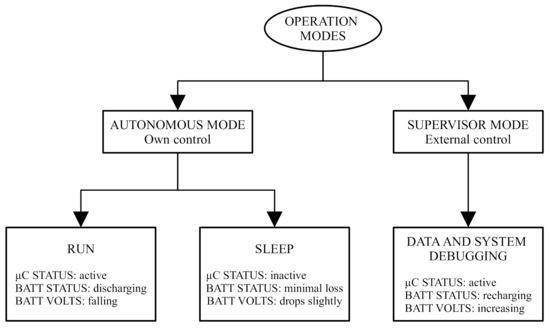
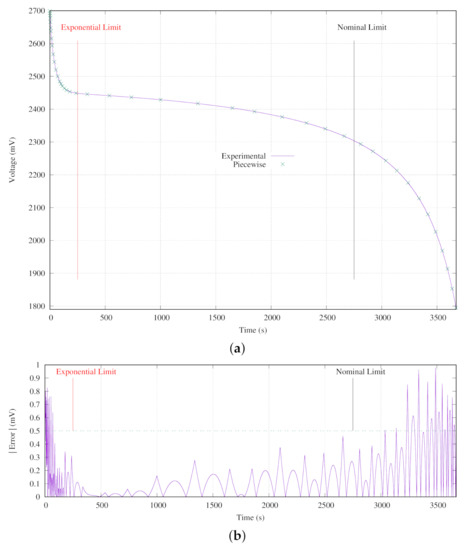
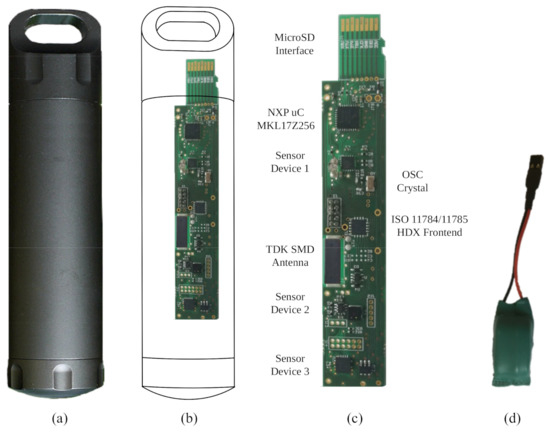
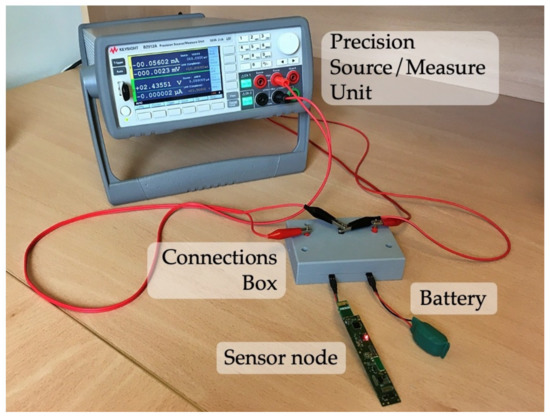
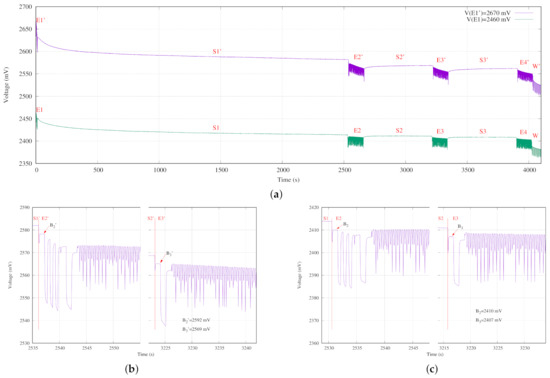
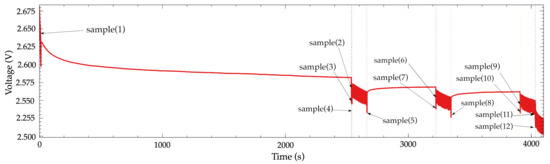
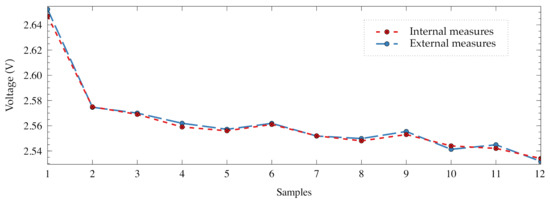
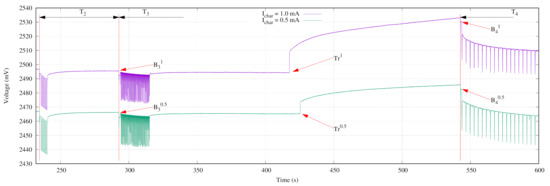
In this paper, a new method for gaining the control of standalone underwater sensor nodes based on sensing the power supply evolution is presented. Underwater sensor networks are designed to support multiple extreme scenarios such as network disconnections. In those cases, the sensor nodes involved should go into standalone, and its wired and wireless communications should be disabled. This paper presents how to exit from the standalone status and enter into debugging mode following a practical ultra-low power design methodology. In addition, the discharge and regeneration effects are analyzed and modeled to minimize the error using the sensor node self measurements. Once the method is presented, its implementation details are discussed including other solutions like wake up wireless modules or a pin interruption solution. Its advantages and disadvantages are discussed. The method proposed is evaluated with several simulations and laboratory experiments using a real aquaculture sensor node. Finally, all the results obtained demonstrate the usefulness of our new method to gain the control of a standalone sensor node. The proposal is better than other approaches when the hibernation time is longer than 167.45
s. Finally, our approach requires two orders of magnitude less energy than the best practical solution.
Full article
►▼
Show Figures
Open AccessArticle
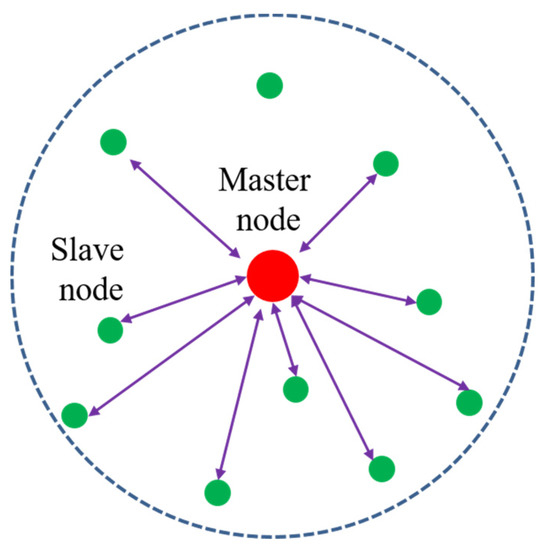
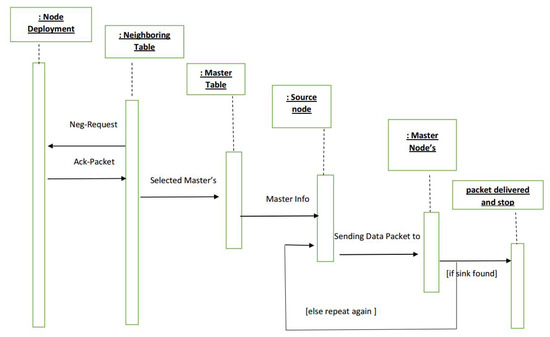
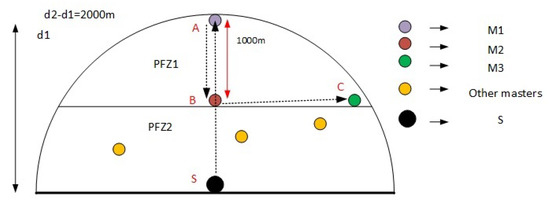
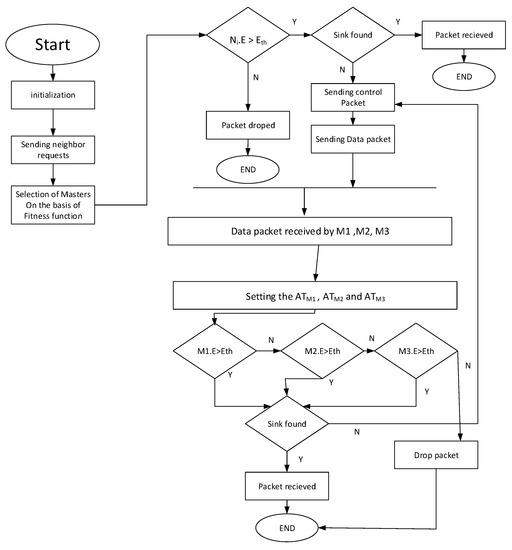
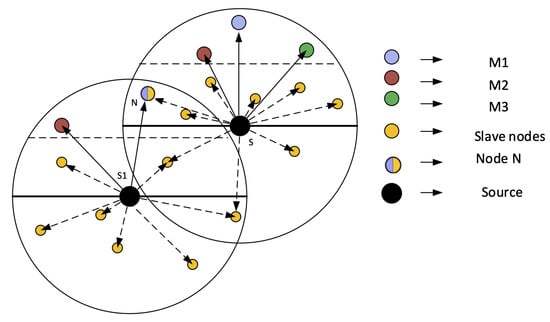
Investigating Master–Slave Architecture for Underwater Wireless Sensor Network
by
Sadeeq Jan, Eiad Yafi, Abdul Hafeez, Hamza Waheed Khatana, Sajid Hussain, Rohail Akhtar and Zahid Wadud
Cited by 10 | Viewed by 3919
Abstract
A significant increase has been observed in the use of Underwater Wireless Sensor Networks (UWSNs) over the last few decades. However, there exist several associated challenges with UWSNs, mainly due to the nodes’ mobility, increased propagation delay, limited bandwidth, packet duplication, void holes,
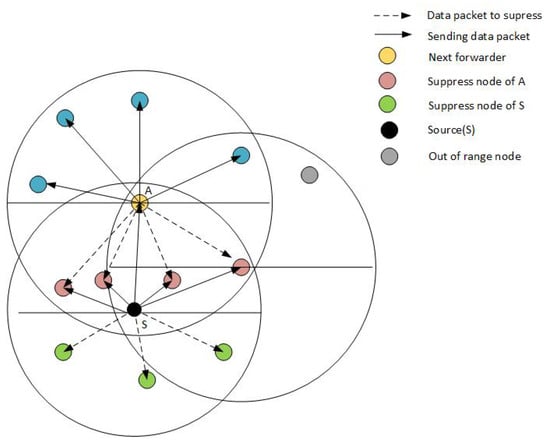
[...] Read more.
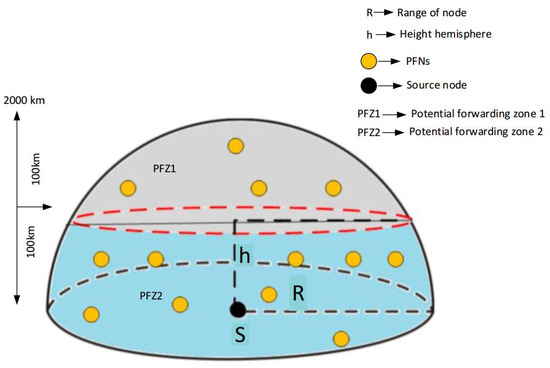
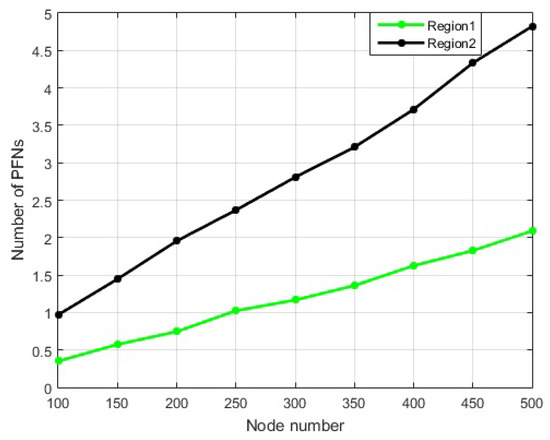
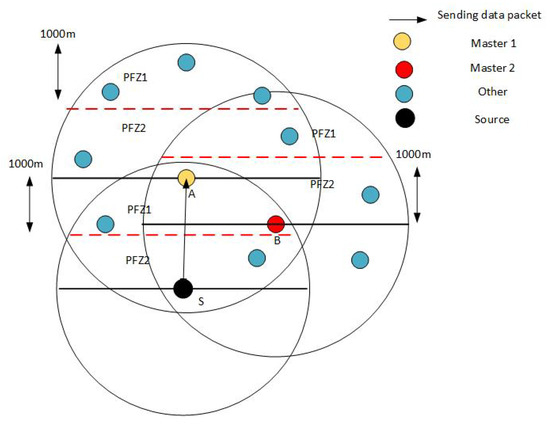
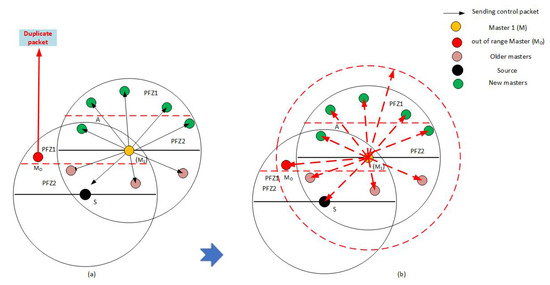
A significant increase has been observed in the use of Underwater Wireless Sensor Networks (UWSNs) over the last few decades. However, there exist several associated challenges with UWSNs, mainly due to the nodes’ mobility, increased propagation delay, limited bandwidth, packet duplication, void holes, and Doppler/multi-path effects. To address these challenges, we propose a protocol named “An Efficient Routing Protocol based on Master–Slave Architecture for Underwater Wireless Sensor Network (ERPMSA-UWSN)” that significantly contributes to optimizing energy consumption and data packet’s long-term survival. We adopt an innovative approach based on the master–slave architecture, which results in limiting the forwarders of the data packet by restricting the transmission through master nodes only. In this protocol, we suppress nodes from data packet reception except the master nodes. We perform extensive simulation and demonstrate that our proposed protocol is delay-tolerant and energy-efficient. We achieve an improvement of 13% on energy tax and 4.8% on Packet Delivery Ratio (PDR), over the state-of-the-art protocol.
Full article
►▼
Show Figures
Open AccessArticle
Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s)
by
Rahul Mourya, Mauro Dragone and Yvan Petillot
Cited by 11 | Viewed by 2037
Abstract
Underwater acoustic sensor networks (UWASNs) can revolutionize the subsea domain by enabling low-cost monitoring of subsea assets and the marine environment. Accurate localization of the UWASNs is essential for these applications. In general, range-based localization techniques are preferred for their high accuracy in
[...] Read more.
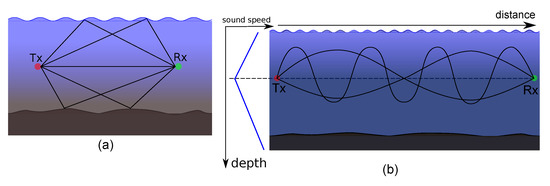
Underwater acoustic sensor networks (UWASNs) can revolutionize the subsea domain by enabling low-cost monitoring of subsea assets and the marine environment. Accurate localization of the UWASNs is essential for these applications. In general, range-based localization techniques are preferred for their high accuracy in estimated locations. However, they can be severely affected by variable sound speed, multipath spreading, and other effects of the acoustic channel. In addition, an inefficient localization scheme can consume a significant amount of energy, reducing the effective life of the battery-powered sensor nodes. In this paper, we propose robust, efficient, and practically implementable localization schemes for static UWASNs. The proposed schemes are based on the Time-Difference-of-Arrival (TDoA) measurements and the nodes are localized passively, i.e., by just listening to beacon signals from multiple anchors, thus saving both the channel bandwidth and energy. The robustness in location estimates is achieved by considering an appropriate statistical noise model based on a plausible acoustic channel model and certain practical assumptions. To overcome the practical challenges of deploying and maintaining multiple permanent anchors for TDoA measurements, we propose practical schemes of using a single or multiple surface vehicles as virtual anchors. The robustness of localization is evaluated by simulations under realistic settings. By combining a mobile anchor(s) scheme with a robust estimator, this paper presents a complete package of efficient, robust, and practically usable localization schemes for low-cost UWASNs.
Full article
►▼
Show Figures
Open AccessArticle
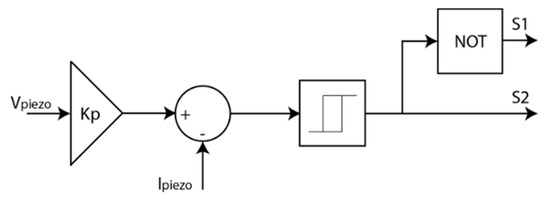
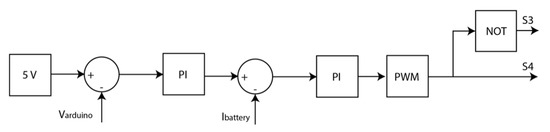
Piezoelectric Energy Harvesting Controlled with an IGBT H-Bridge and Bidirectional Buck–Boost for Low-Cost 4G Devices
by
Daniel Teso-Fz-Betoño, Iñigo Aramendia, Jon Martinez-Rico, Unai Fernandez-Gamiz and Ekaitz Zulueta
Cited by 10 | Viewed by 2890
Abstract
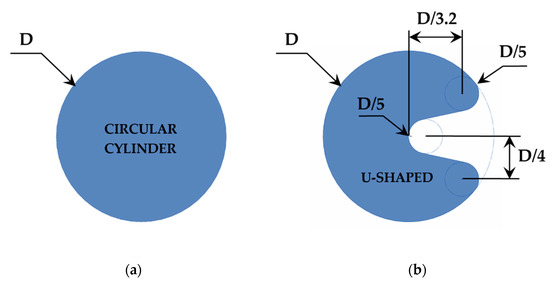
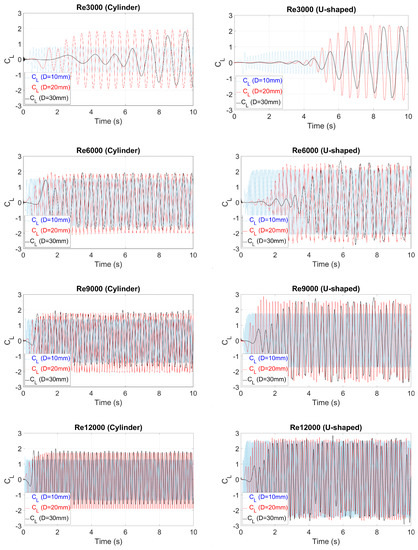
In this work, a semi-submersible piezoelectric energy harvester was used to provide power to a low-cost 4G Arduino shield. Initially, unsteady Reynolds averaged Navier–Stokes (URANS)-based simulations were conducted to investigate the dynamic forces under different conditions. An adaptive differential evolution (JADE) multivariable optimization
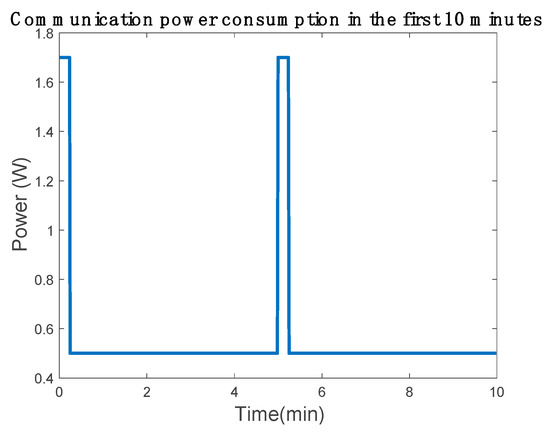
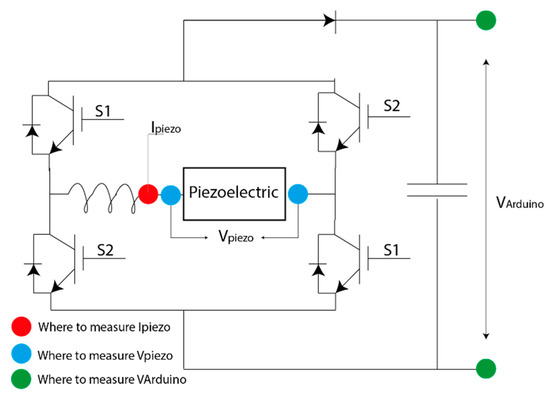
[...] Read more.
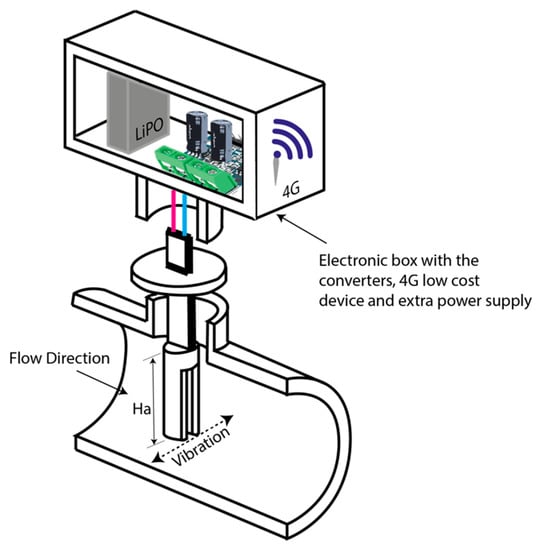
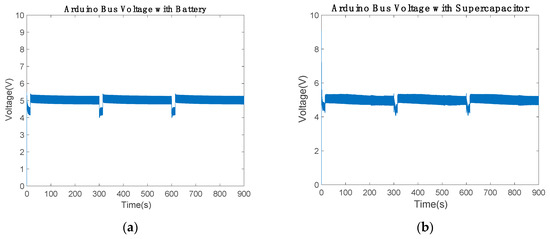
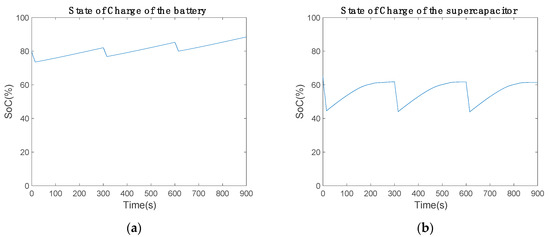
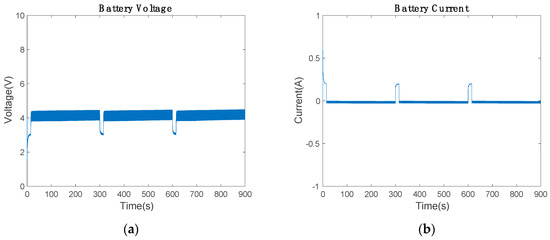
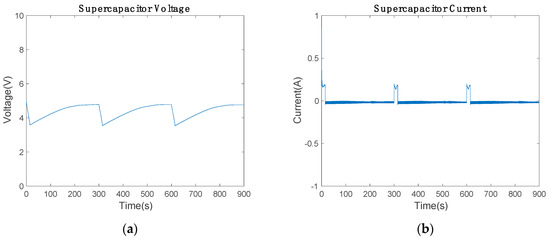
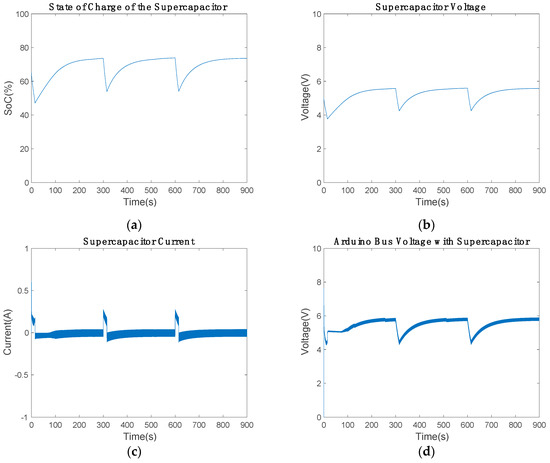
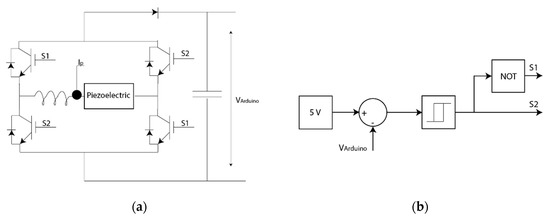
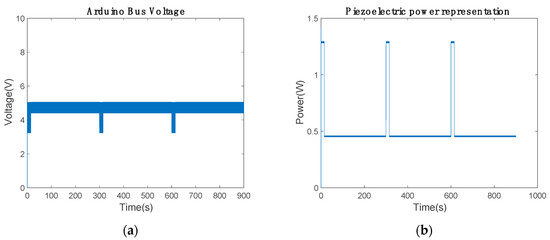
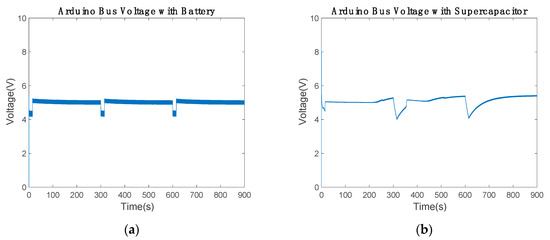
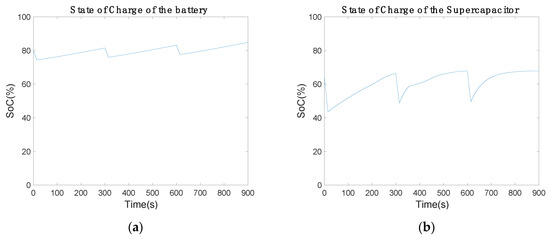
In this work, a semi-submersible piezoelectric energy harvester was used to provide power to a low-cost 4G Arduino shield. Initially, unsteady Reynolds averaged Navier–Stokes (URANS)-based simulations were conducted to investigate the dynamic forces under different conditions. An adaptive differential evolution (JADE) multivariable optimization algorithm was used for the power calculations. After JADE optimization, a communication cycle was designed. The shield works in two modes: communication and power saving. The power-saving mode is active for 285 s and the communication mode for 15 s. This cycle consumes a determinate amount of power, which requires a specific piezoelectric material and, in some situations, an extra power device, such as a battery or supercapacitor. The piezoelectric device is able to work at the maximum power point using a specific Insulated Gate Bipolar Transistor (IGBT) H-bridge controlled with a relay action. For the extra power supply, a bidirectional buck–boost converter was implemented to flow the energy in both directions. This electronic circuit was simulated to compare the extra power supply and the piezoelectric energy harvester behavior. Promising results were obtained in terms of power production and energy storage. We used 0.59, 0.67 and 1.69 W piezoelectric devices to provide the energy for the 4G shield and extra power supply device.
Full article
►▼
Show Figures
Open AccessArticle
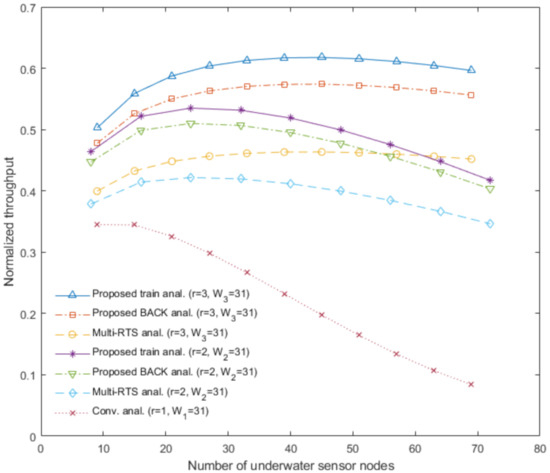
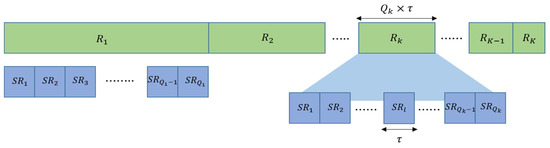
Analysis of Throughput and Delay for an Underwater Multi-DATA Train Protocol with Multi-RTS Reception and Block ACK
by
Ho Young Hwang
Cited by 3 | Viewed by 1700
Abstract
We propose an underwater multi-DATA train protocol with multi-RTS reception and block ACK (BACK) for underwater acoustic sensor networks. Due to long underwater acoustic propagation delay, some RTS frames may not overlap at a sink node, even if the RTS frames were sent
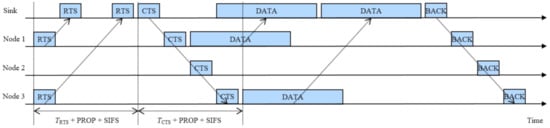
[...] Read more.
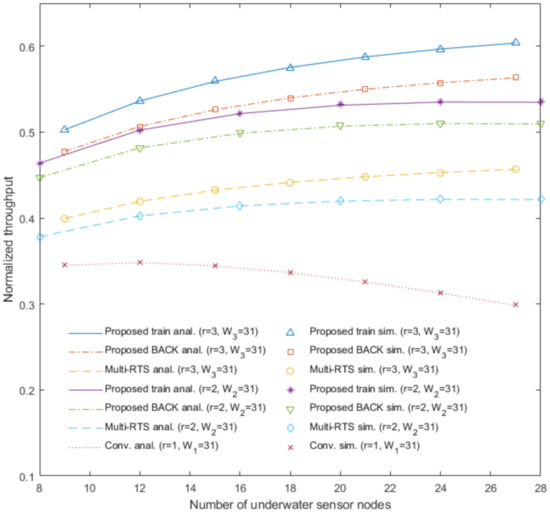
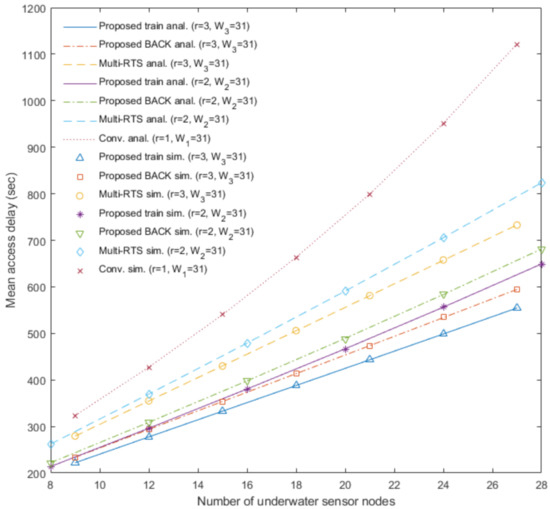
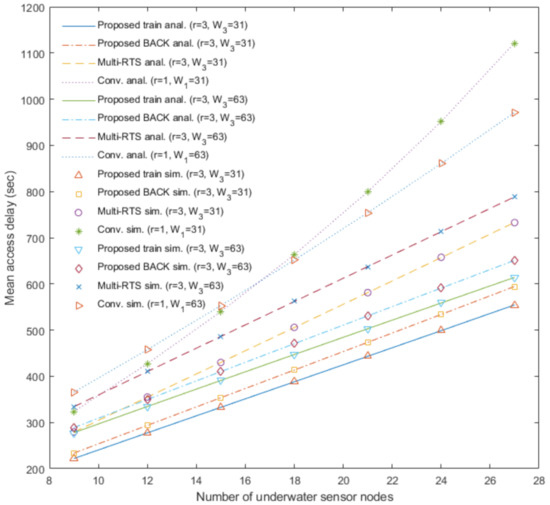
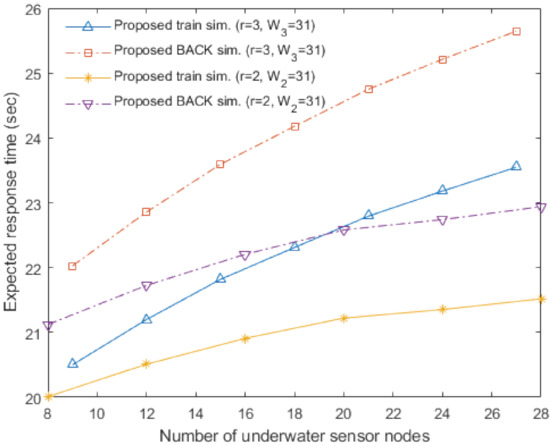
We propose an underwater multi-DATA train protocol with multi-RTS reception and block ACK (BACK) for underwater acoustic sensor networks. Due to long underwater acoustic propagation delay, some RTS frames may not overlap at a sink node, even if the RTS frames were sent to the sink node simultaneously by different sensor nodes. We consider that our underwater sink node can recover these nonoverlapping RTS frames. Since our RTS frame contains ID of the RTS sending node and a timestamp, the sink node calculates the propagation delay between the RTS sending node and the sink node, then broadcasts a CTS frame. Since our CTS frame contains when each RTS sending node can transmit a DATA frame to the sink node, multiple DATA frames transmitted by different sensor nodes can be formed as a train at the sink node. We also propose an underwater BACK protocol which is analogous to our proposed underwater multi-DATA train protocol. We analyze normalized throughput and mean access delay of our proposed protocols and the conventional protocols. The analytical and simulation results show that our analysis is accurate and our proposed protocols outperform the conventional protocols. Our proposed protocol can shorten the delay and increase the throughput via the multi-DATA train, multi-RTS reception, and BACK.
Full article
►▼
Show Figures
Open AccessArticle
A Feasibility Analysis of an Application-Based Partial Initialization (API) Protocol for Underwater Wireless Acoustic Sensor Networks
by
Changho Yun and Suhan Choi
Cited by 2 | Viewed by 1868
Abstract
Initialization methods for underwater wireless acoustic sensor networks (UWASNs) have been proposed as a subset of other network protocols under the simple assumption that all the nodes in the network can be initialized at once. However, it is generally time- and energy-intensive to
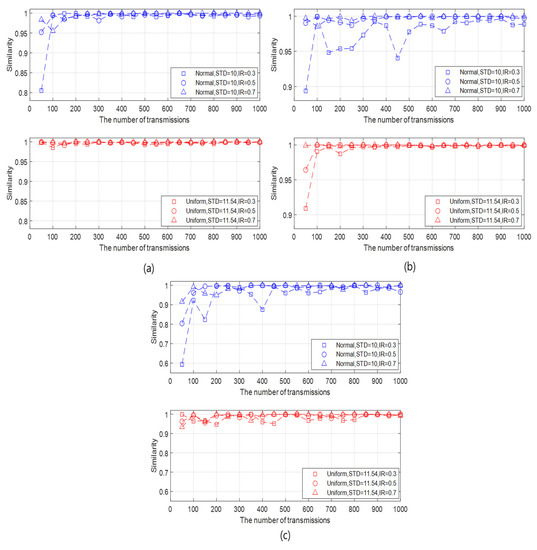
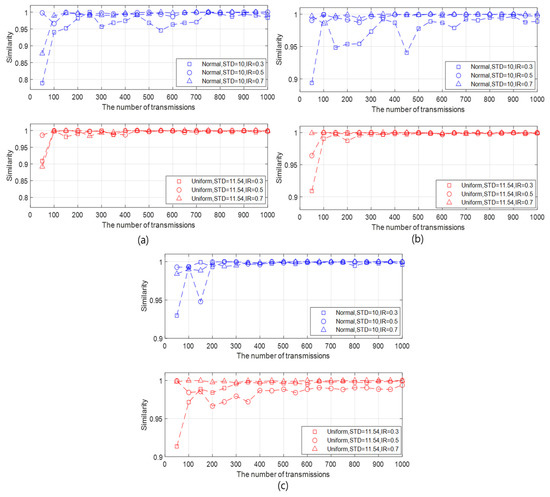
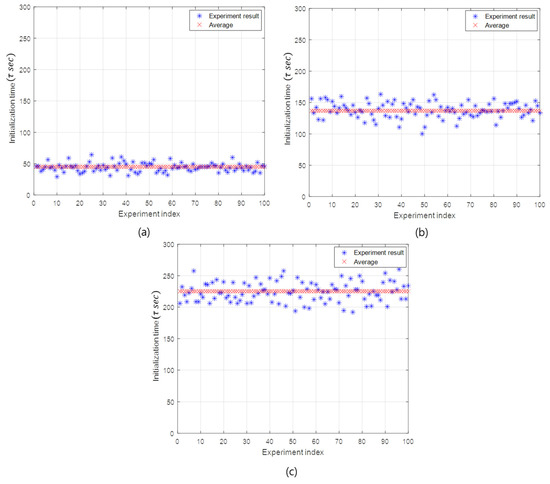
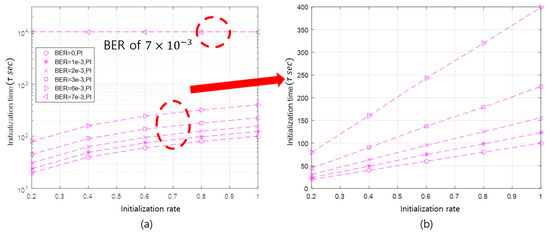
[...] Read more.
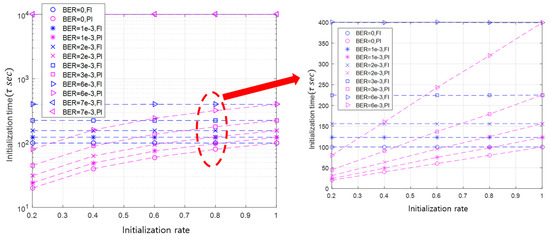
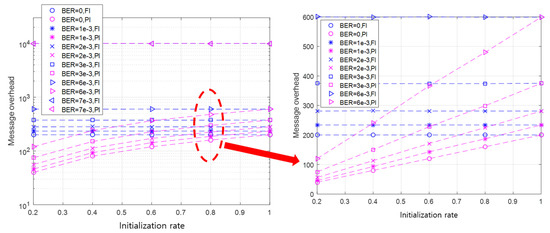
Initialization methods for underwater wireless acoustic sensor networks (UWASNs) have been proposed as a subset of other network protocols under the simple assumption that all the nodes in the network can be initialized at once. However, it is generally time- and energy-intensive to initialize all nodes in a UWASN due to unstable underwater channel conditions. To improve network efficiency, we propose the Application-based Partial Initialization (API) protocol, which initializes only the same number of nodes as the number of activated nodes required to run a specific application. Reducing the number of active nodes is also particularly advantageous underwater since the replacement of batteries is costly. To the best of our knowledge, the API is the first approach that initializes nodes partially according to applications. Thus, we investigate the feasibility of the API for a UWASN by analyzing its performance via simulations. From the results, it is shown that the API provides similar data statistics compared with the conventional full initialization that initializes all nodes. Moreover, the API outperforms the full initialization in terms of the initialization time and message overhead performances.
Full article
►▼
Show Figures
Open AccessArticle
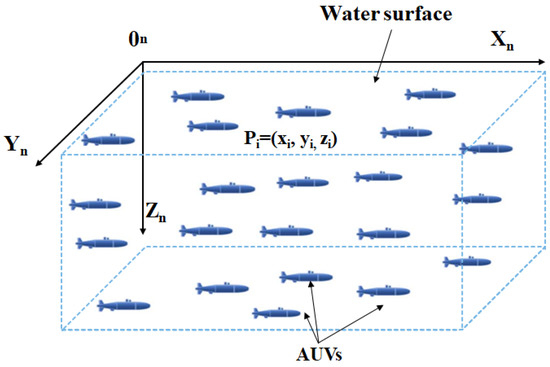
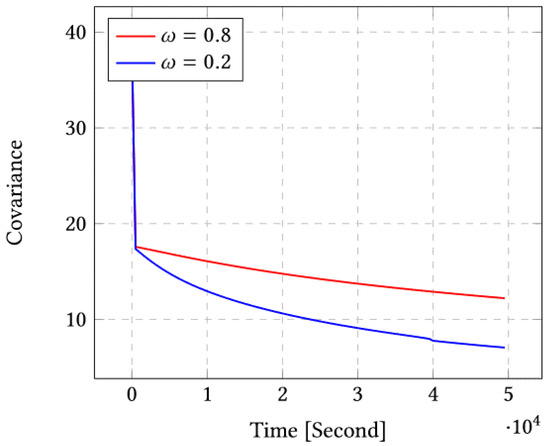
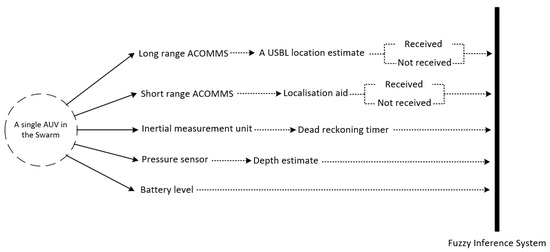
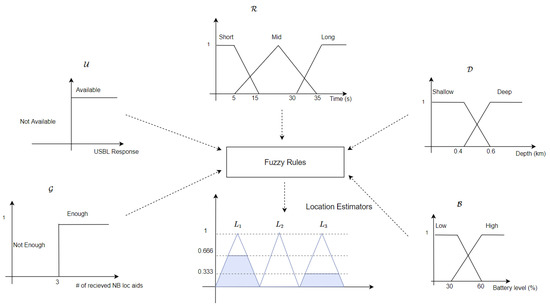
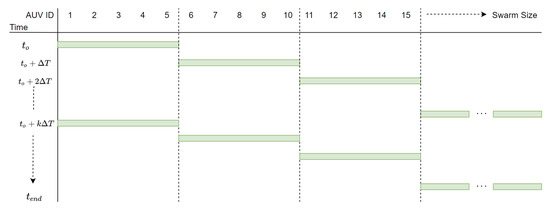
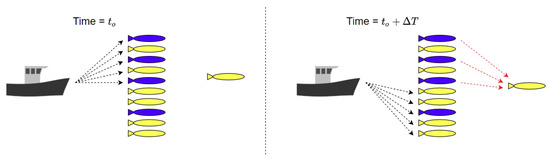
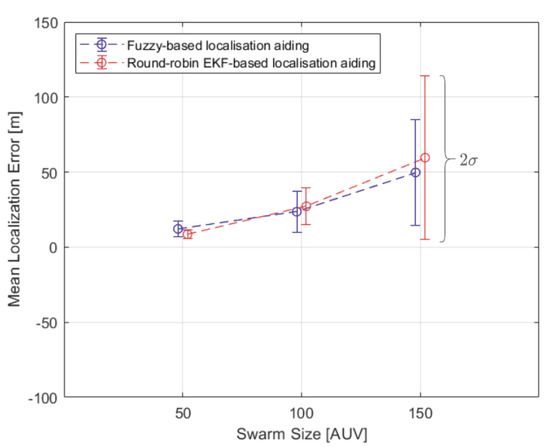
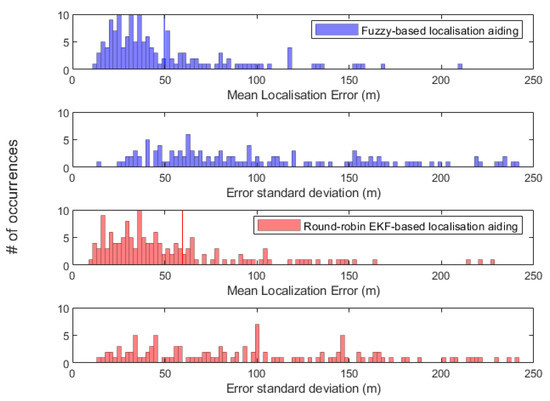
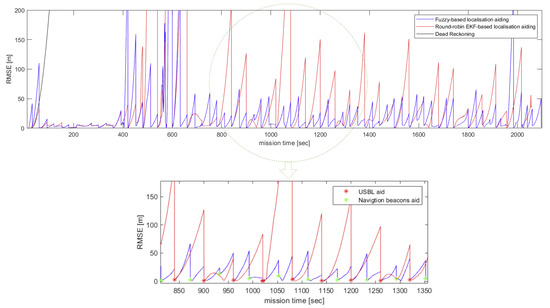
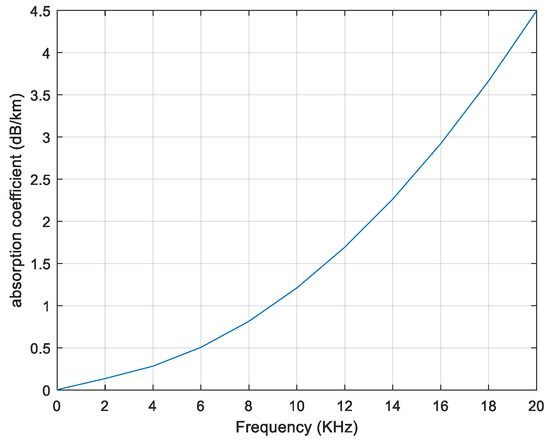
A Fuzzy Cooperative Localisation Framework for Underwater Robotic Swarms
by
Adham Sabra and Wai-Keung Fung
Cited by 12 | Viewed by 3794
Abstract
This article proposes a holistic localisation framework for underwater robotic swarms to dynamically fuse multiple position estimates of an autonomous underwater vehicle while using fuzzy decision support system. A number of underwater localisation methods have been proposed in the literature for wireless sensor
[...] Read more.
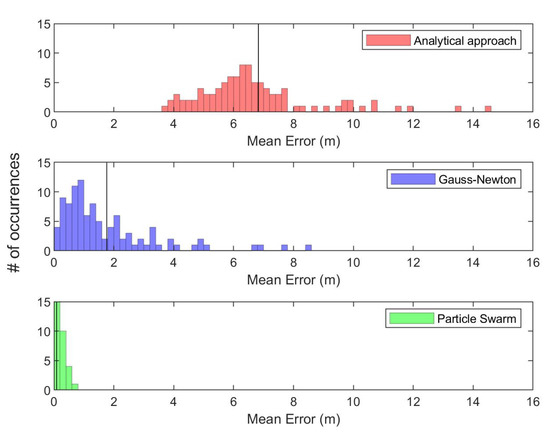
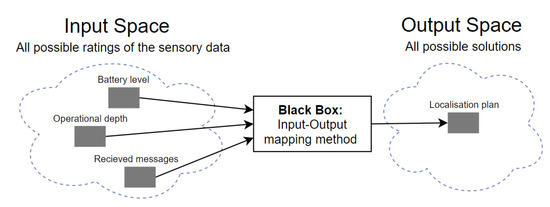
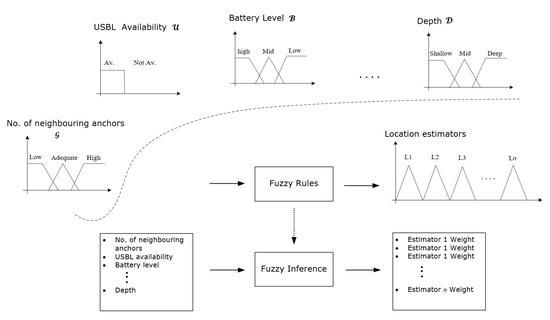
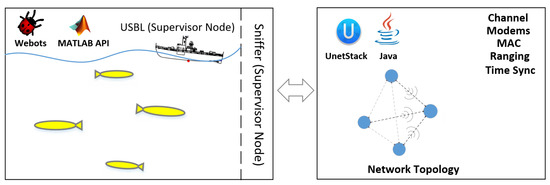
This article proposes a holistic localisation framework for underwater robotic swarms to dynamically fuse multiple position estimates of an autonomous underwater vehicle while using fuzzy decision support system. A number of underwater localisation methods have been proposed in the literature for wireless sensor networks. The proposed navigation framework harnesses the established localisation methods in order to provide navigation aids in the absence of acoustic exteroceptive sensors navigation aid (i.e., ultra-short base line) and it can be extended to accommodate newly developed localisation methods by expanding the fuzzy rule base. Simplicity, flexibility, and scalability are the main three advantages that are inherent in the proposed localisation framework when compared to other traditional and commonly adopted underwater localisation methods, such as the Extended Kalman Filter. A physics-based simulation platform that considers environment’s hydrodynamics, industrial grade inertial measurement unit, and underwater acoustic communications characteristics is implemented in order to validate the proposed localisation framework on a swarm size of 150 autonomous underwater vehicles. The proposed fuzzy-based localisation algorithm improves the entire swarm mean localisation error and standard deviation by 16.53% and 35.17%, respectively, when compared to the Extended Kalman Filter based localisation with round-robin scheduling.
Full article
►▼
Show Figures
Open AccessArticle
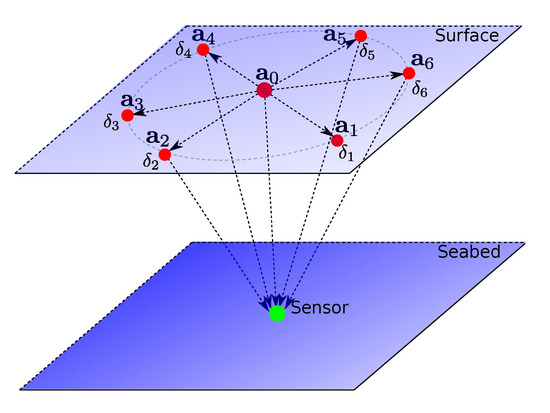
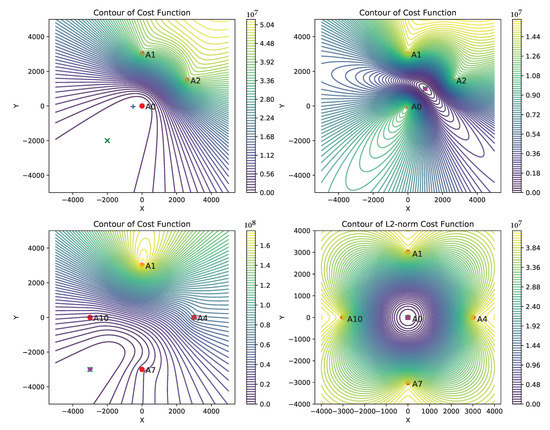
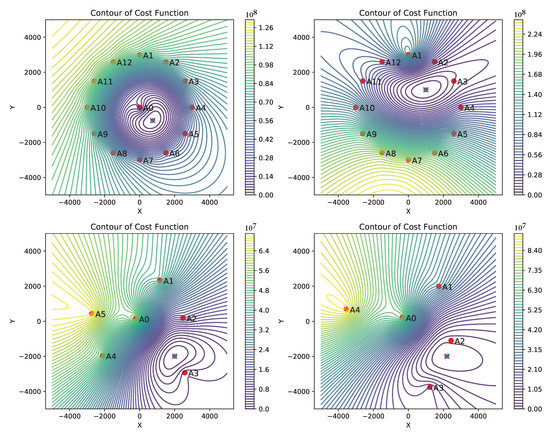
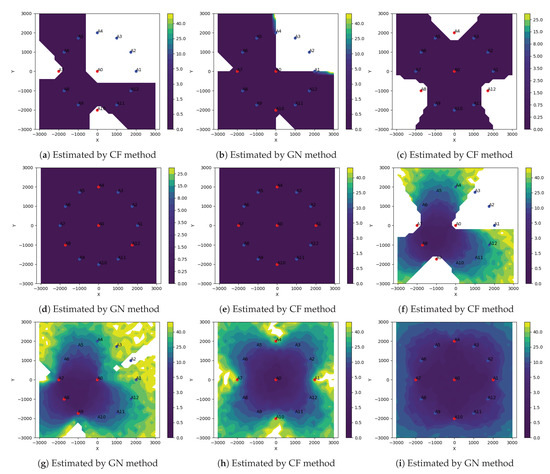
Underwater TDOA Acoustical Location Based on Majorization-Minimization Optimization
by
Shuangshuang Li, Haixin Sun and Hamada Esmaiel
Cited by 18 | Viewed by 4045
Abstract
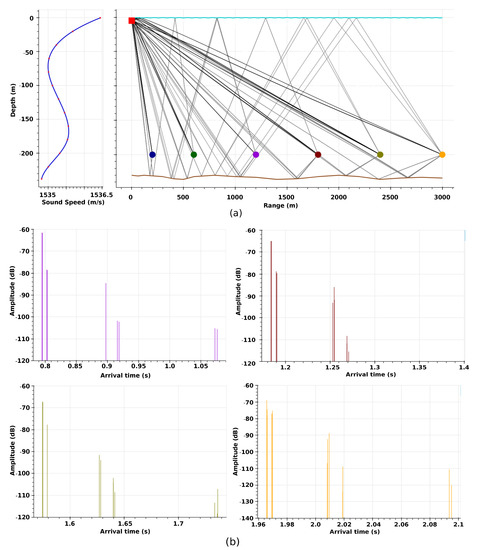
Underwater acoustic localization is a useful technique applied to any military and civilian applications. Among the range-based underwater acoustic localization methods, the time difference of arrival (TDOA) has received much attention because it is easy to implement and relatively less affected by the
[...] Read more.
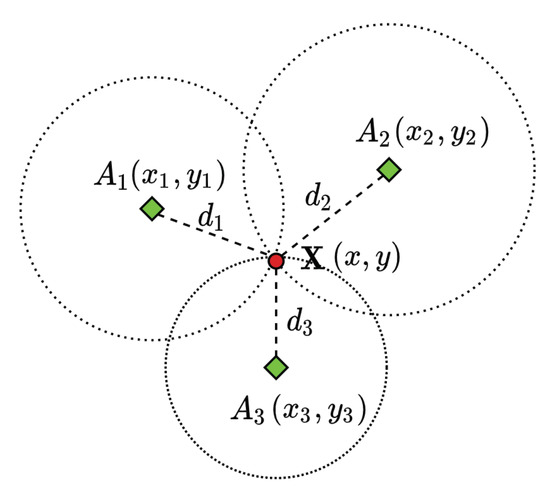
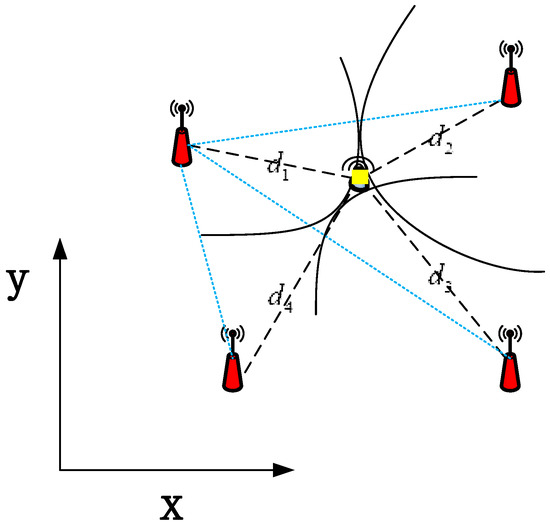
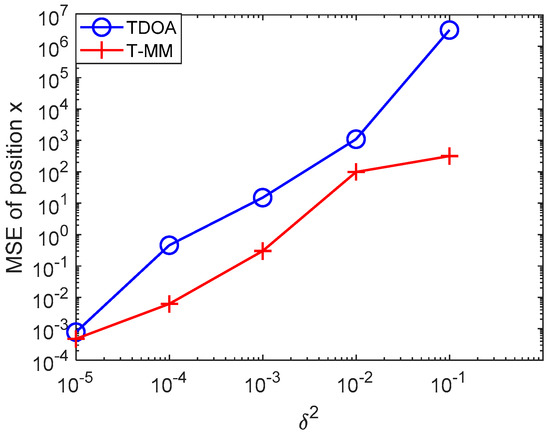
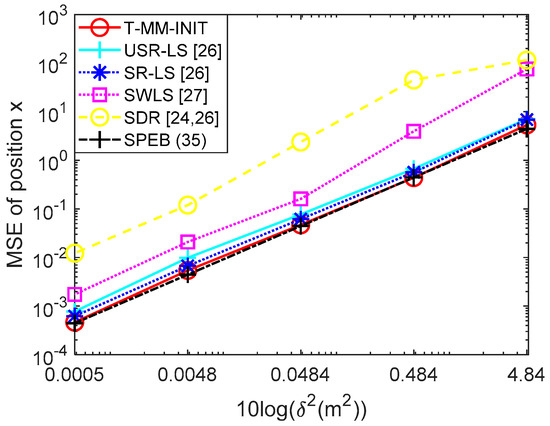
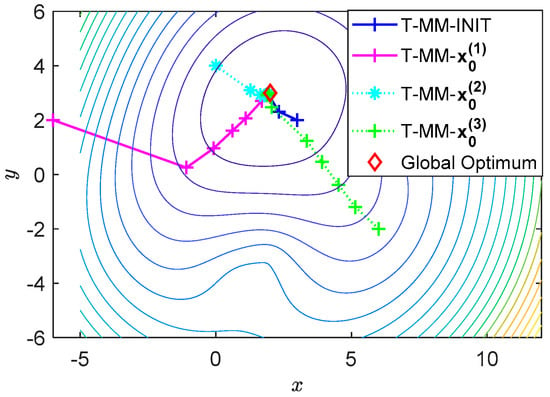
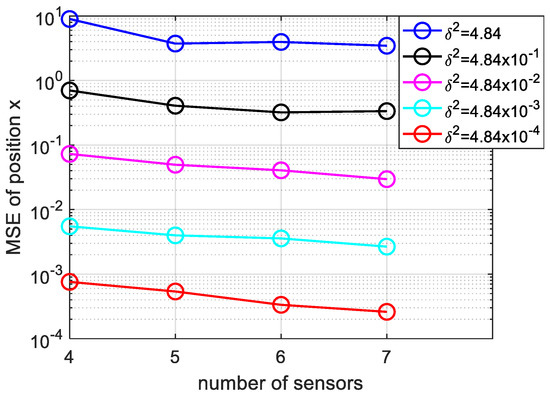
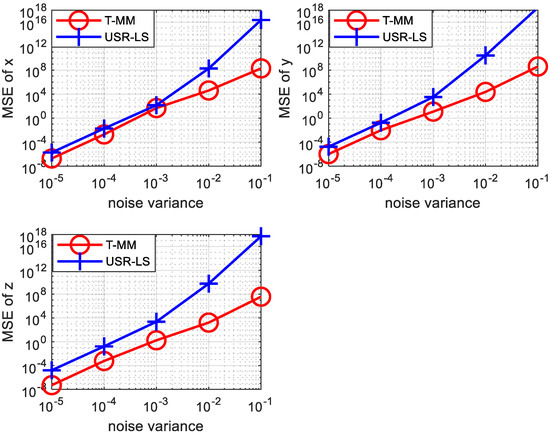
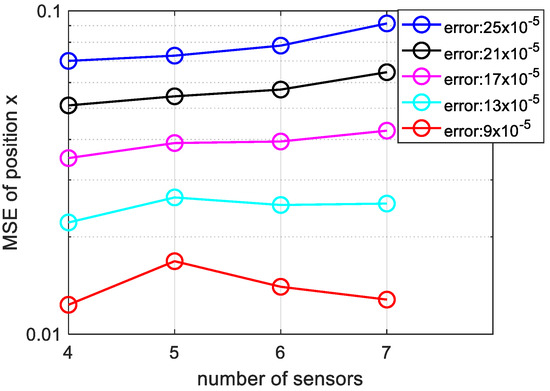
Underwater acoustic localization is a useful technique applied to any military and civilian applications. Among the range-based underwater acoustic localization methods, the time difference of arrival (TDOA) has received much attention because it is easy to implement and relatively less affected by the underwater environment. This paper proposes a TDOA-based localization algorithm for an underwater acoustic sensor network using the maximum-likelihood (ML) ratio criterion. To relax the complexity of the proposed localization complexity, we construct an auxiliary function, and use the majorization-minimization (MM) algorithm to solve it. The proposed localization algorithm proposed in this paper is called a T-MM algorithm. T-MM is applying the MM algorithm to the TDOA acoustic-localization technique. As the MM algorithm iterations are sensitive to the initial points, a gradient-based initial point algorithm is used to set the initial points of the T-MM scheme. The proposed T-MM localization scheme is evaluated based on squared position error bound (SPEB), and through calculation, we get the SPEB expression by the equivalent Fisher information matrix (EFIM). The simulation results show how the proposed T-MM algorithm has better performance and outperforms the state-of-the-art localization algorithms in terms of accuracy and computation complexity even under a high presence of underwater noise.
Full article
►▼
Show Figures




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}