




Appl. Sci. 2023, 13(21), 11941; https://doi.org/10.3390/app132111941 - 31 Oct 2023
Viewed by 810
Abstract
►
Show Figures
This paper deals with the analysis of nonlinear vibration phenomena in the arm system of an industrial robot. The presented mathematical model of the robot takes into account the flexibility of the joints, which results in low-frequency vibrations in the arm. The study
[...] Read more.
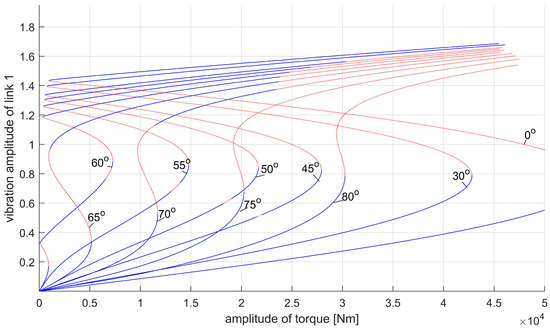
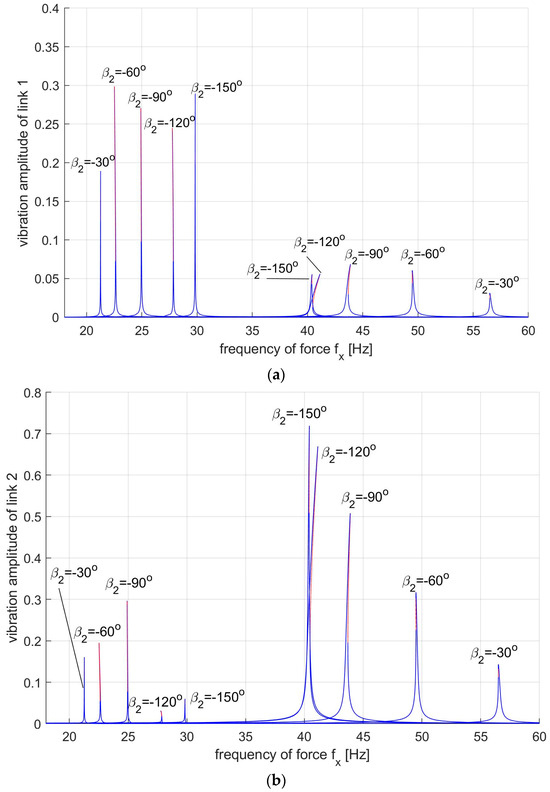
This paper deals with the analysis of nonlinear vibration phenomena in the arm system of an industrial robot. The presented mathematical model of the robot takes into account the flexibility of the joints, which results in low-frequency vibrations in the arm. The study of vibration phenomena has been carried out using analytical, numerical and experimental methods. Special attention has been paid to bifurcation phenomena. The influence of two bifurcation parameters on the behaviour of the robot arm was studied. It was shown that the amplitude and frequency of the harmonic excitation create a nonlinear effect on the vibration amplitudes of the links. In bifurcation regions, the vibration amplitudes can even differ several times depending on the direction of changes in the bifurcation parameter. In general, the results indicate that, contrary to common practice, it is worth paying attention to nonlinear phenomena when analysing robot vibrations.
Full article
Figure 1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}