
Analysis of Maintenance Techniques for a Three-Dimensional Digital Twin-Based Railway Facility with Tunnels


Abstract
:1. Introduction
2. Materials and Methods
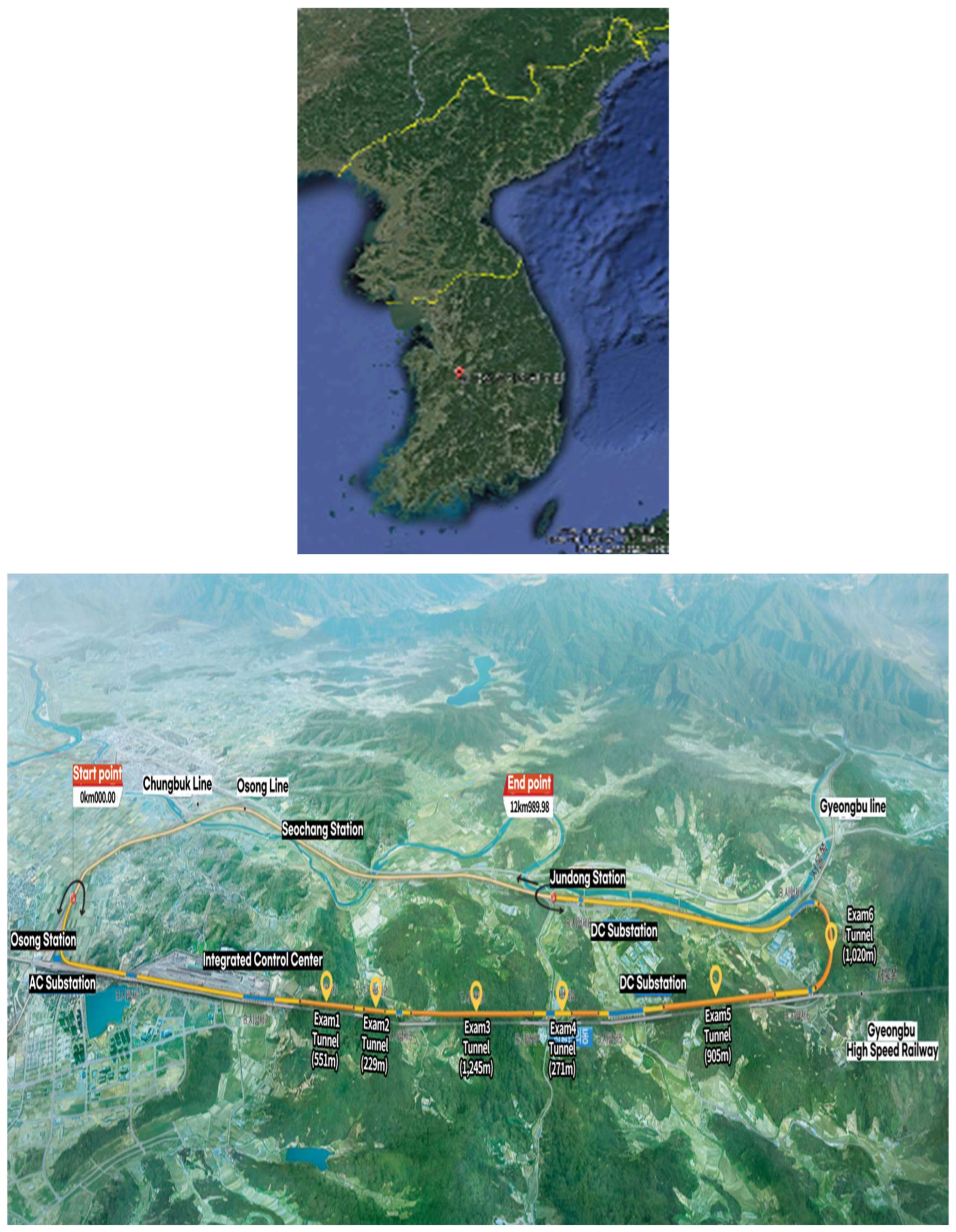
2.1. Research Site
2.2. Experimental Methods
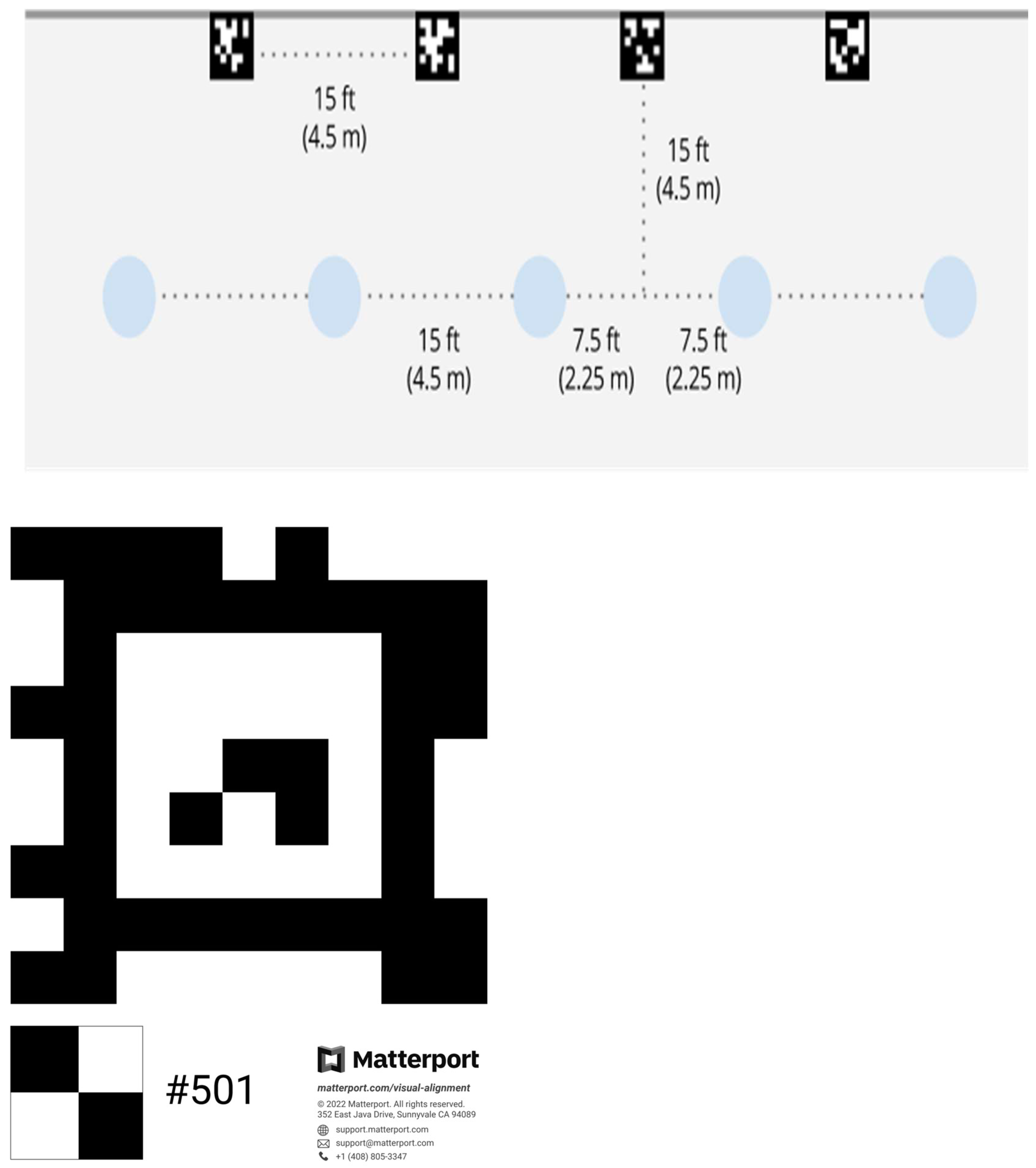
2.2.1. Scan Equipment and Shooting Method
2.2.2. Capture Software
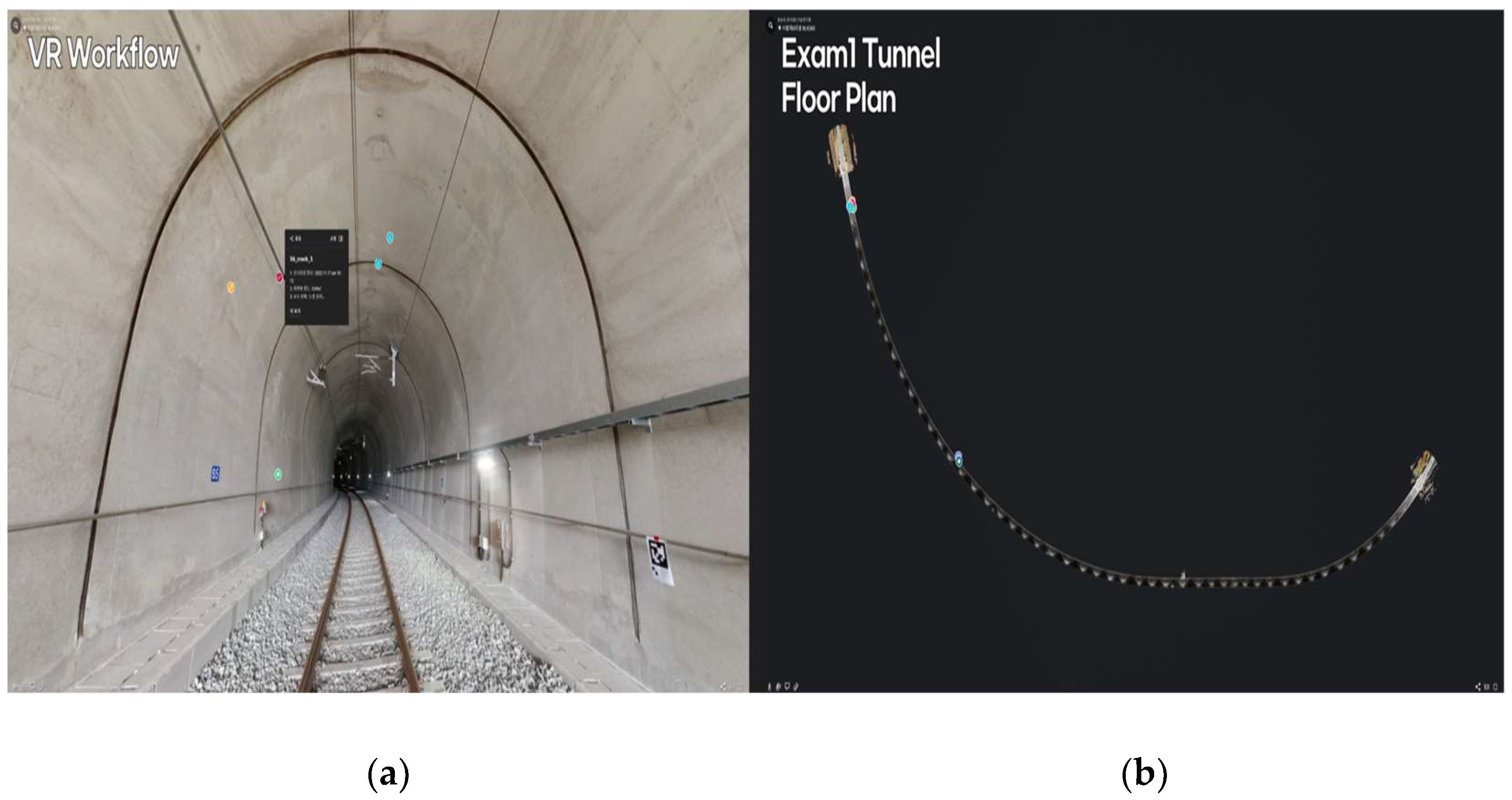
2.2.3. 3D Digital Twin Program
3. Results and Discussion
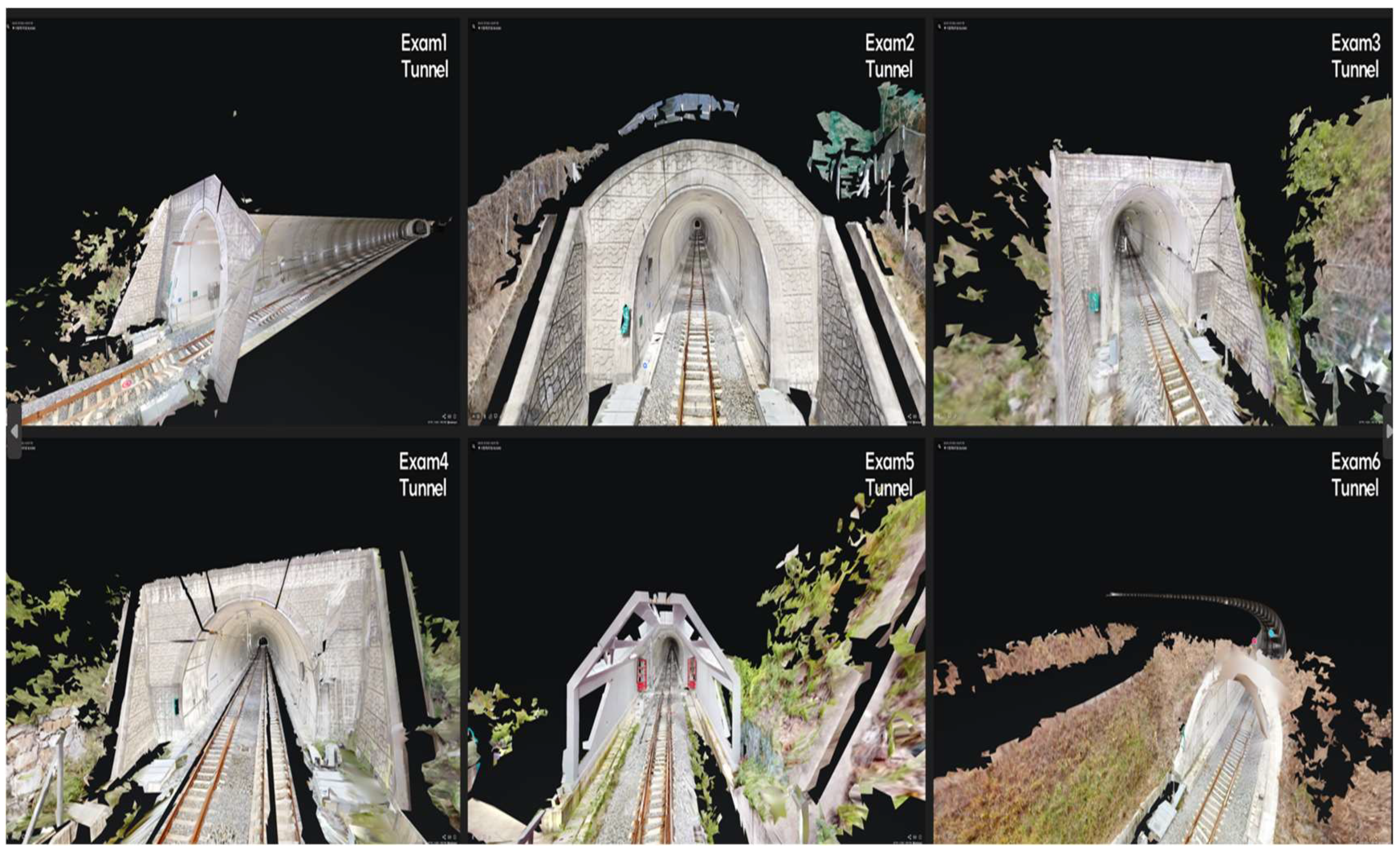
3.1. Scan Results
3.2. Comparative Analysis of LiDAR Techniques
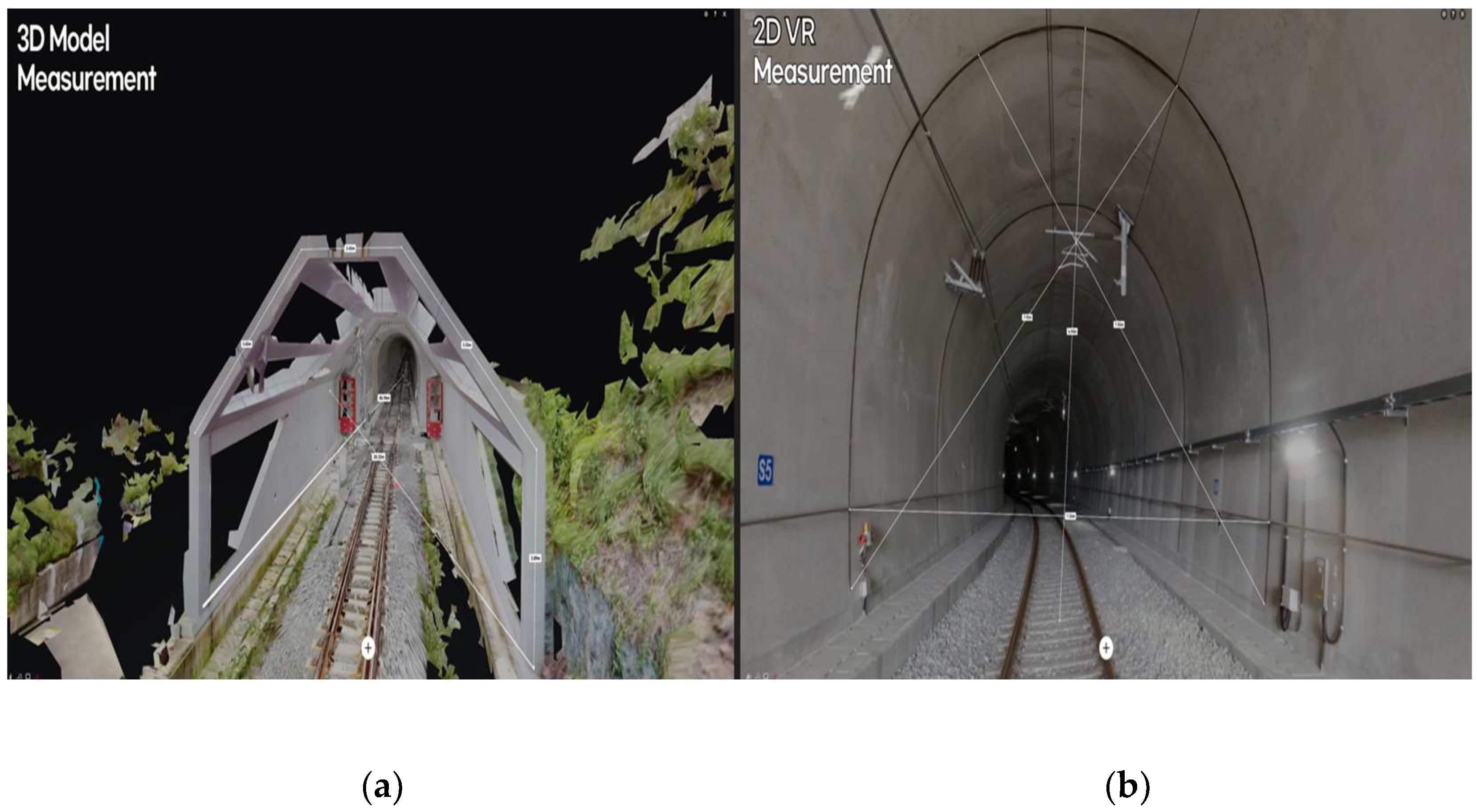
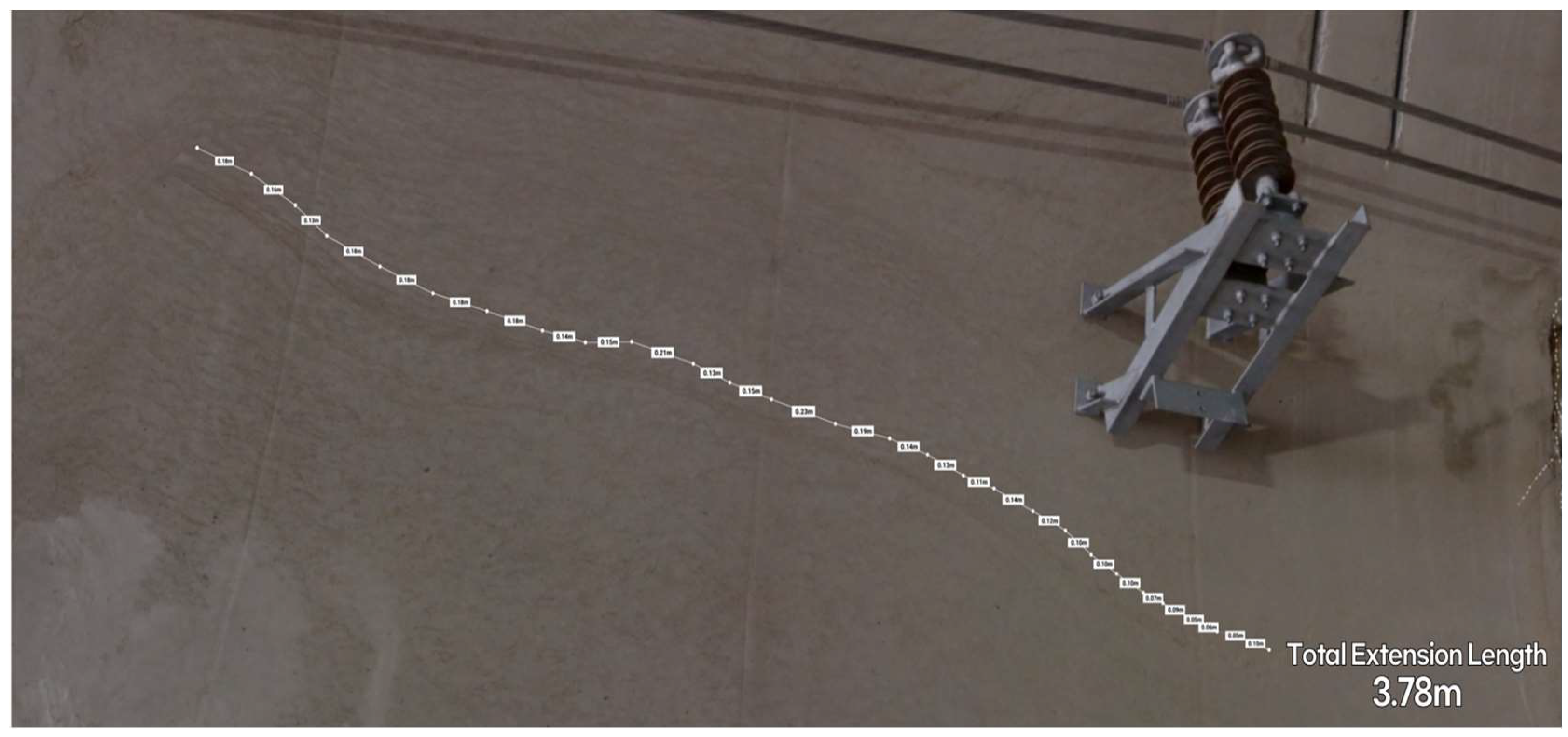
3.3. Measurement Method and Utilization Plan
4. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Government of the Republic of Korea. Korean New Deal 2.0 Promotion Plan; Government of the Republic of Korea: Seoul, Republic of Korea, 2021. (In Korean) [Google Scholar]
- Ministry of Land, Infrastructure and Transport. Construction Industry BIM Basic Guidelines; Ministry of Land, Infrastructure and Transport: Sejong City, Republic of Korea, 2020. (In Korean) [Google Scholar]
- Korea Railroad Research Institute. Railway BIM 2030 Roadmap; Korea Railroad Research Institute: Seoul, Republic of Korea, 2018. (In Korean) [Google Scholar]
- Information and Communication Strategy Committee. The Korean Version of the New Deal 2.0, the Core of the Hyper-Connected New Industry. Digital Twin Enablement Strategy; Information and Communication Strategy Committee: Seoul, Republic of Korea, 2021. (In Korean) [Google Scholar]
- Kim, M.K. A study on the post-environmental impact assessment and derivation of optimal techniques for comprehensive railway test track using UAV. J. Korean Soc. Railw. 2021, 23, 625–636. (In Korean) [Google Scholar] [CrossRef]
- Shults, R.; Levin, E.; Habibi, R.; Shenoy, S.; Honcheruk, O.; Hart, T.; An, Z. Capability of Matterport 3D camera for industrial archaeology sites inventory. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1059–1064. [Google Scholar] [CrossRef] [Green Version]
- Luther Oberlin, K.T.; Park, S.J.; Kim, R. Developing virtual tour content for the inside and outside of a building using drones and Matterport. Korea Contents Assoc. 2022, 18, 74–84. [Google Scholar] [CrossRef]
- Ramakrishnan, S.K.; Gokaslan, A.; Wijmans, E.; Maksymets, O.; Clegg, A.; Turner, J.; Undersander, E.; Galuba, W.; Westbury, A.; Chang, A.X.; et al. Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI. arXiv 2021, arXiv:2109.08238. [Google Scholar]
- Karmesh, Y.; Ram, R.; Santhosh, K.R.; Theo, G.; John, T.; Aaron, G.; Noah, M.; Angel, X.C.; Dhruv, B.; Manolis, S.; et al. Habitat-Matterport 3D Semantics Dataset. arXiv 2022, arXiv:2210.05633. [Google Scholar]
- Virtanen, J.P.; Kurkela, M.; Turppa, T.; Vaaja, M.T.; Julin, A.; Kukko, A.; Hyyppä, J.; Ahlavuo, M.; von Numers, J.E.; Haggren, H.; et al. Depth camera indoor mapping for 3D virtual radio play. Photogramm. Rec. 2018, 33, 171–195. [Google Scholar] [CrossRef] [Green Version]
- McDonald, T.; Robinson, M.; Tian, G.Y. Developments in 3D visualization of the rail tunnel subsurface for inspection and monitoring. Appl. Sci. 2022, 12, 11310. [Google Scholar] [CrossRef]
- Attard, L.; Debono, C.J.; Valentino, G.; Di Castro, M. Tunnel inspection using photogrammetric techniques and image processing: A review. ISPRS J. Photogramm. Remote Sens. 2018, 144, 180–188. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tunnel 1 | Tunnel 2 | Tunnel 3 | Tunnel 4 | Tunnel 5 | Tunnel 6 | |
|---|---|---|---|---|---|---|
| Tunnel shape | straight | straight | roundabout | straight | straight | sharp curve |
| Line type | monorail | monorail | monorail | double track | monorail | monorail |
| Excavation method | NATM tunnel | |||||
| Tunnel extension length (m) | 551 | 229 | 1245 | 271 | 905 | 1020 |
| Tunnel diameter (m) | 7.40 | 7.44 | 7.28 | 14.54 | 7.23 | 7.40 |
| Tunnel height (m) | 6.90 | 6.94 | 6.86 | 9.16 | 7.85 | 6.86 |
| Iconographic form | cobblestone | cobblestone | cobblestone | cobblestone | gravel, concrete roadbed | cobblestone |
| Designation | GeoSlam ZEB-REVO Horizon | Matterport Pro2 | Leica BLK360 |
|---|---|---|---|
| Photo |  |  |  |
| Summary | Portable handheld 3D scanner (indoor/outdoor) | Appropriate for most indoor spaces and limited outdoor spaces (for indoor use) | Appropriate for construction design and built projects (indoor/outdoor combined use) |
| 3D sensor | LiDAR-based | Structured light (infrared) sensor | LiDAR-based |
| Result | 3D point cloud | 2D panoramic image + 3D point cloud | 2D panoramic image + 3D point cloud |
| Device connection | Wi-Fi | Wi-Fi | Wi-Fi |
| Relative accuracy | Up to 6 mm | - | Up to 4 mm |
| Image quality | 25 MP | 134.2 MP | 34 MP |
| Points per second | 300,000 | - | 360,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.-k.; Hwang, D.; Park, D. Analysis of Maintenance Techniques for a Three-Dimensional Digital Twin-Based Railway Facility with Tunnels. Platforms 2023, 1, 5-17. https://doi.org/10.3390/platforms1010002
Kim M-k, Hwang D, Park D. Analysis of Maintenance Techniques for a Three-Dimensional Digital Twin-Based Railway Facility with Tunnels. Platforms. 2023; 1(1):5-17. https://doi.org/10.3390/platforms1010002
Chicago/Turabian StyleKim, Min-kyeong, Dongkyu Hwang, and Duckshin Park. 2023. "Analysis of Maintenance Techniques for a Three-Dimensional Digital Twin-Based Railway Facility with Tunnels" Platforms 1, no. 1: 5-17. https://doi.org/10.3390/platforms1010002