
Imaginary Coating Algorithm Approaching Dense Accumulation of Granular Material in Simulations with Discrete Element Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
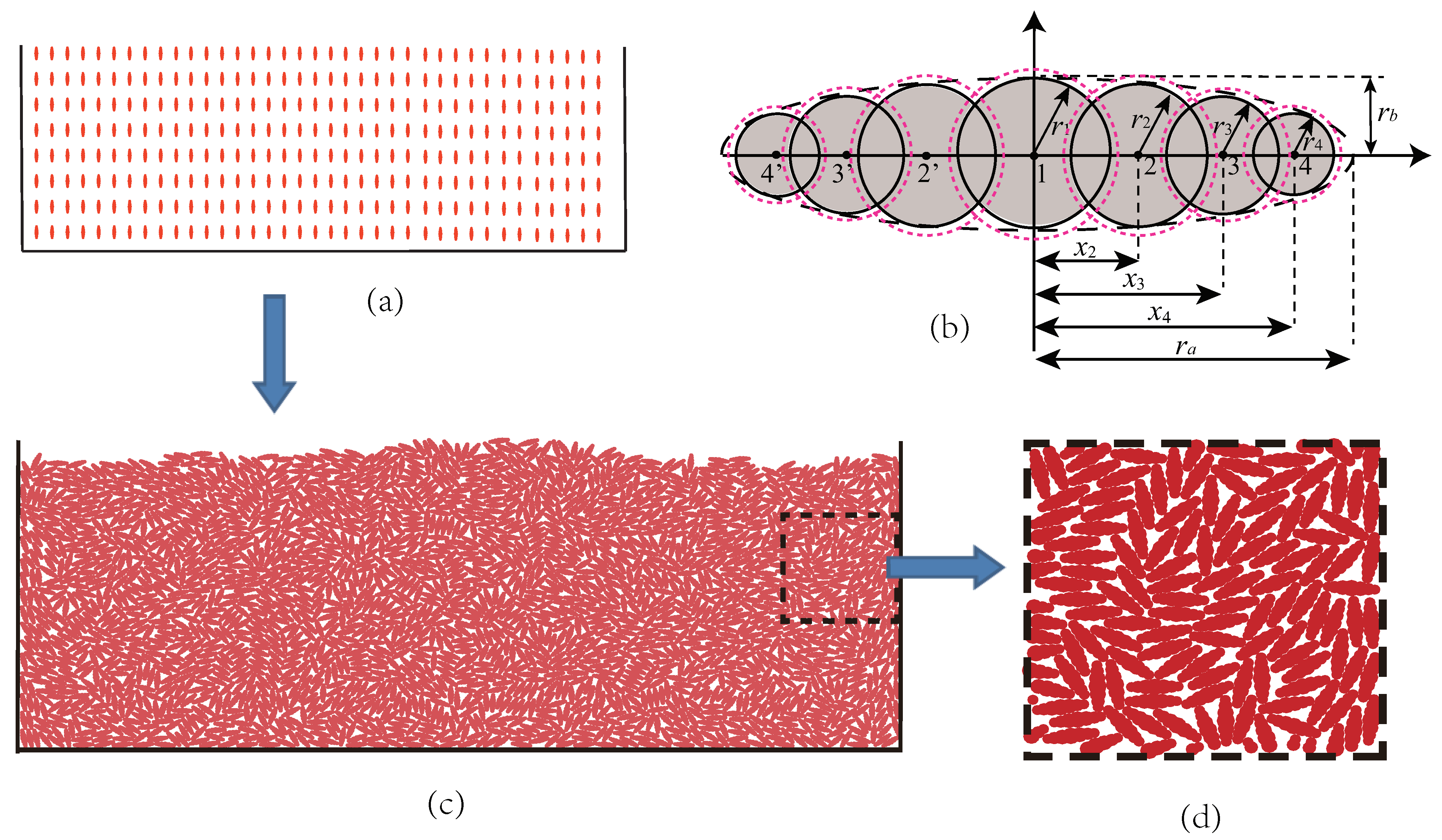
2. Glued Particle Method
3. Brief Introduction to Collision Model
4. Imaginary Coating Algorithm
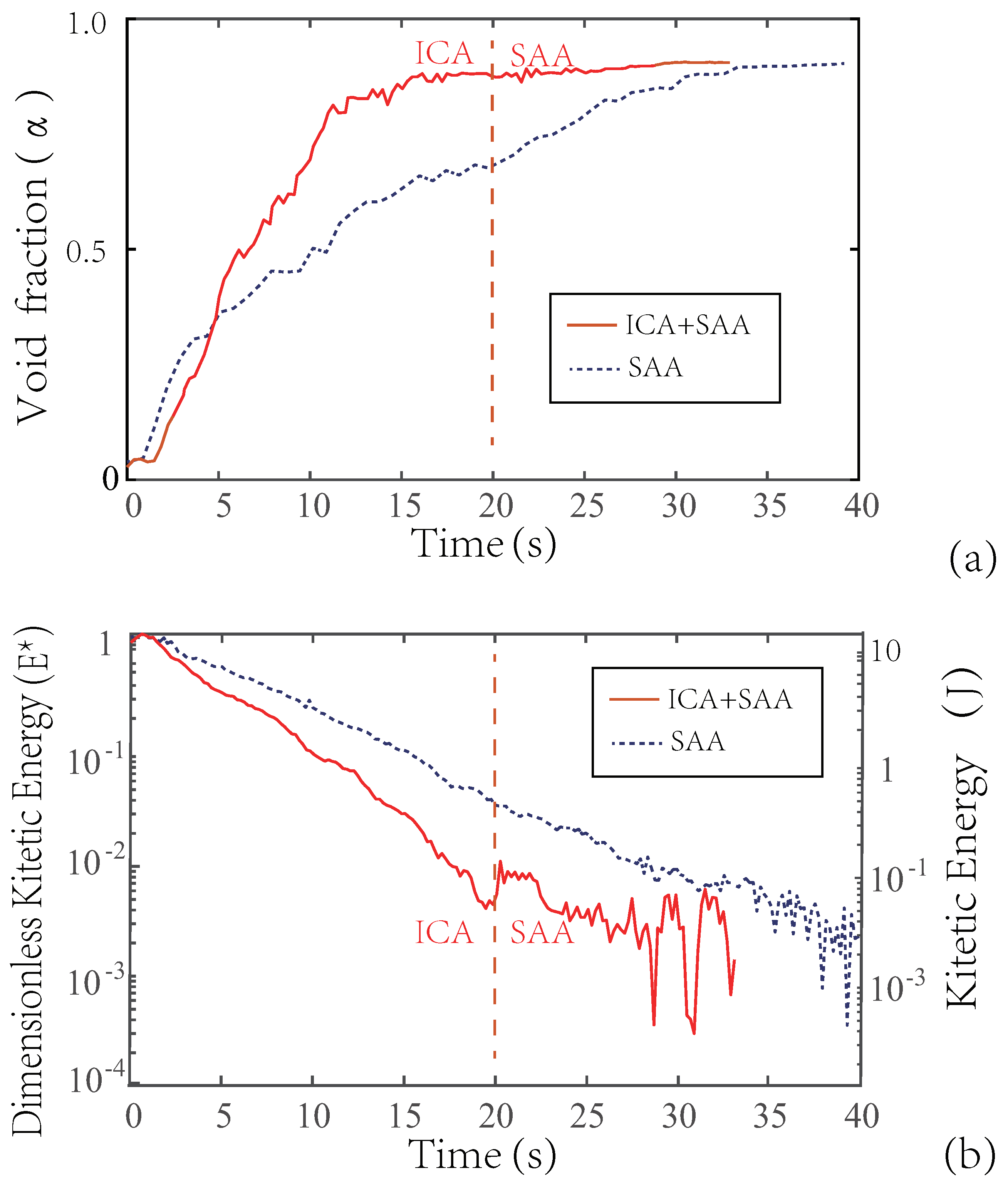
5. Comparison between ICA and SAA
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| COR | Coefficient of Restitution |
| DEM | Discrete Element Method |
| DMT | Derjaguin–Muller–Toporov Model |
| EDM | Event-Driven Model |
| GPM | Glued Particle Method |
| ICA | Imaginary Coating Algorithm |
| JKR | Johnson–Kendall–Roberts model |
| MPM | Material Point Method |
| SAA | Simulated Annealing Algorithm |
| SPH | Smoothed Particle Hydrodynamics |
| TDM | Time-Driven Model |
References
- Benenati, R.; Brosilow, C.B. Void fraction distribution in beds of spheres. AIChE J. 1961, 8, 359. [Google Scholar] [CrossRef]
- Götz, J.; Zick, K.; Heine, C.; König, T. Visualisation of flow processes in packed beds with NMR imaging: Determination of the local porosity, velocity vector and local dispersion coefficients. Chem. Eng. Process. 2002, 41, 611. [Google Scholar] [CrossRef]
- Salvat, W.I.; Mariani, N.J.; Barreto, G.F.; Marínez, O.M. An algorithm to simulate packing structure in cylindrical containers. Catal. Today 2005, 513, 107–108. [Google Scholar]
- Recarey, C.; Pérez, I.; Roselló, R.; Muniz, M.; Hernández, E.; Giraldo, R.; Oñate, E. Advances in particle packing algorithms for generating the medium in the discrete element method. Comput. Methods Appl. Mech. Eng. 2019, 345, 336362. [Google Scholar] [CrossRef]
- Pickett, G.T.; Gross, M.; Okuyam, H. Spontaneous chirality in simple system. Phys. Rev. Lett. 2000, 85, 3652. [Google Scholar] [CrossRef]
- Huang, W.E. Ellipsoid Packing Simulations. Master’s Thesis, National Cheng Kung University, Tainan, Taiwan, China, 2009. [Google Scholar]
- Wang, F.; Huang, Y.J. Simulation of granular crystallization of cubic particles in twisting container using discrete element method. Adv. Powder Tech. 2021, 32, 534–545. [Google Scholar] [CrossRef]
- Markauskas, D.; Kačianauskas, R.; Džiugys, A.D.; Navakas, R. Investigation of adequacy of multi-sphere approximation of elliptical particles for DEM simulations. Granul. Matter 2010, 12, 107. [Google Scholar] [CrossRef]
- Thomas, P.A.; Bray, J.D. Capturing nonspherical shape of granular media with disk clusters. J. Geotech. Geoenviron. Eng. 1999, 125, 169. [Google Scholar] [CrossRef]
- Wait, R. Discrete element models of particle flows. Math. Model. Anal. 2001, 6, 156. [Google Scholar] [CrossRef]
- Wang, C.Y.; Wang, C.F.; Sheng, J. A packing generation scheme for the granular assemblies with 3D ellipsoidal particles. Int. J. Numer. Anal. Meth. Geomech. 1999, 23, 815. [Google Scholar] [CrossRef]
- Höhner, D.; Wirtz, S.; Kruggel-Emden, H.; Scherer, V. Comparison of the multi-sphere and polyhedral approach to simulate non-spherical particles within the discrete element method: Influence on temporal force evolution for multiple contacts. Powder Technol. 2011, 208, 643. [Google Scholar] [CrossRef]
- Verlet, L. Computer “experiments” on classical fluids II: Equilibrium correlation functions. Phys. Rev. 1968, 165, 201. [Google Scholar] [CrossRef]
- Su, D.; Wang, Y.X.; Huang, Y.J.; Zsaki, A.M. Granular jet composed of elliptical particles impacting a fixed target. Powder Technol. 2017, 313, 303–311. [Google Scholar] [CrossRef]
- Cundall, P.A. A Computer Model for Simulating Progressive Large Scale Movements in Blocky Rock Systems. In Proceedings of the International Symposium on Rock Mechanics, Nancy, France, 4–6 October 1971. [Google Scholar]
- Cundall, P.A.; Strack, O.D. An analysis of the vertical deformation of pile groups. Geotechnique 1979, 29, 243. [Google Scholar]
- Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface Energy and the Contact of Elastic Solids. Proc. Phys. Soc. Lond. A 1971, 324, 301–313. [Google Scholar]
- Derjaguin, B.V.; Muller, V.M.; Toporov, Y.P. Effect of contact deformations on the adhesion of particles. J. Colloid Interface Sci. 1975, 53, 314–326. [Google Scholar] [CrossRef]
- Tabor, D. Surface forces and surface interactions. J. Colloid Interface Sci. 1977, 58, 2–13. [Google Scholar] [CrossRef]
- Ramírez, R.; Pöschel, T.; Brilliantov, N.V.; Schwager, T. Coefficient of restitution of colliding viscoelastic spheres. Phys. Rev. E 1999, 60, 4465. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Kawabara, G.; Kono, K. Restitution coefficient in a collision between two spheres. Jpn. J. Appl. Phys. 1987, 26, 1230. [Google Scholar] [CrossRef]
- Mindlin, R.; Deresiewica, H. Elastic Spheres in Contact Under Varying Oblique Forces. J. Appl. Mech. 1953, 20, 327–344. [Google Scholar] [CrossRef]
- Zhong, W.; Yu, A.B.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM modelling of non-sphereical particulates systems: Theoretical development and application. Powder Tech. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Hu, M.; Huang, Y.J.; Wang, F. The Coefficient of Restitution of Spheroid Particles Impacting on a Wall—Part I: Experiments. J. Appl. Mech. 2018, 85, 041006. [Google Scholar] [CrossRef]
- Huang, Y.J.; Hu, M.; Zhou, T. Modelling of the coefficients of restitution for prolate spheroid particles and its application in simulations of 2D granular flow. Granul. Matter 2022, 24, 83. [Google Scholar] [CrossRef]
- Huang, Y.J.; Ge, C.; Nydal, O.J. An introduction to discrete element method: A meso-scale mechanism analysis of granular flow. J. Dispers. Sci. Technol. 2015, 36, 1370. [Google Scholar] [CrossRef]
- Shen, H.H.; Sankaran, B. Internal length and time scales in a simple shear granular flow. Phys. Rev. E 2004, 70, 051308. [Google Scholar] [CrossRef]
- Achenbach, J.D. Wave Propagation in Elastic Solids; North-Holland Publishing Company: Amsterdam, The Netherland, 1973. [Google Scholar]
- Huang, Y.J.; Nydal, O.J.; Yao, B.D. Time step criterions for nonlinear dense packed granular materials in time-driven method simulations. Powder Technol. 2014, 253, 80–88. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Huang, Y.J.; Xuan, C. Imaginary Coating Algorithm Approaching Dense Accumulation of Granular Material in Simulations with Discrete Element Method. Powders 2023, 2, 205-215. https://doi.org/10.3390/powders2010014
Wang F, Huang YJ, Xuan C. Imaginary Coating Algorithm Approaching Dense Accumulation of Granular Material in Simulations with Discrete Element Method. Powders. 2023; 2(1):205-215. https://doi.org/10.3390/powders2010014
Chicago/Turabian StyleWang, Fei, Yrjö Jun Huang, and Chen Xuan. 2023. "Imaginary Coating Algorithm Approaching Dense Accumulation of Granular Material in Simulations with Discrete Element Method" Powders 2, no. 1: 205-215. https://doi.org/10.3390/powders2010014