
Comparison of Methods to Segment Variable-Contrast XCT Images of Methane-Bearing Sand Using U-Nets Trained on Single Dataset Sub-Volumes
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Methane Gas Hydrate Formation and Dissociation Experiments
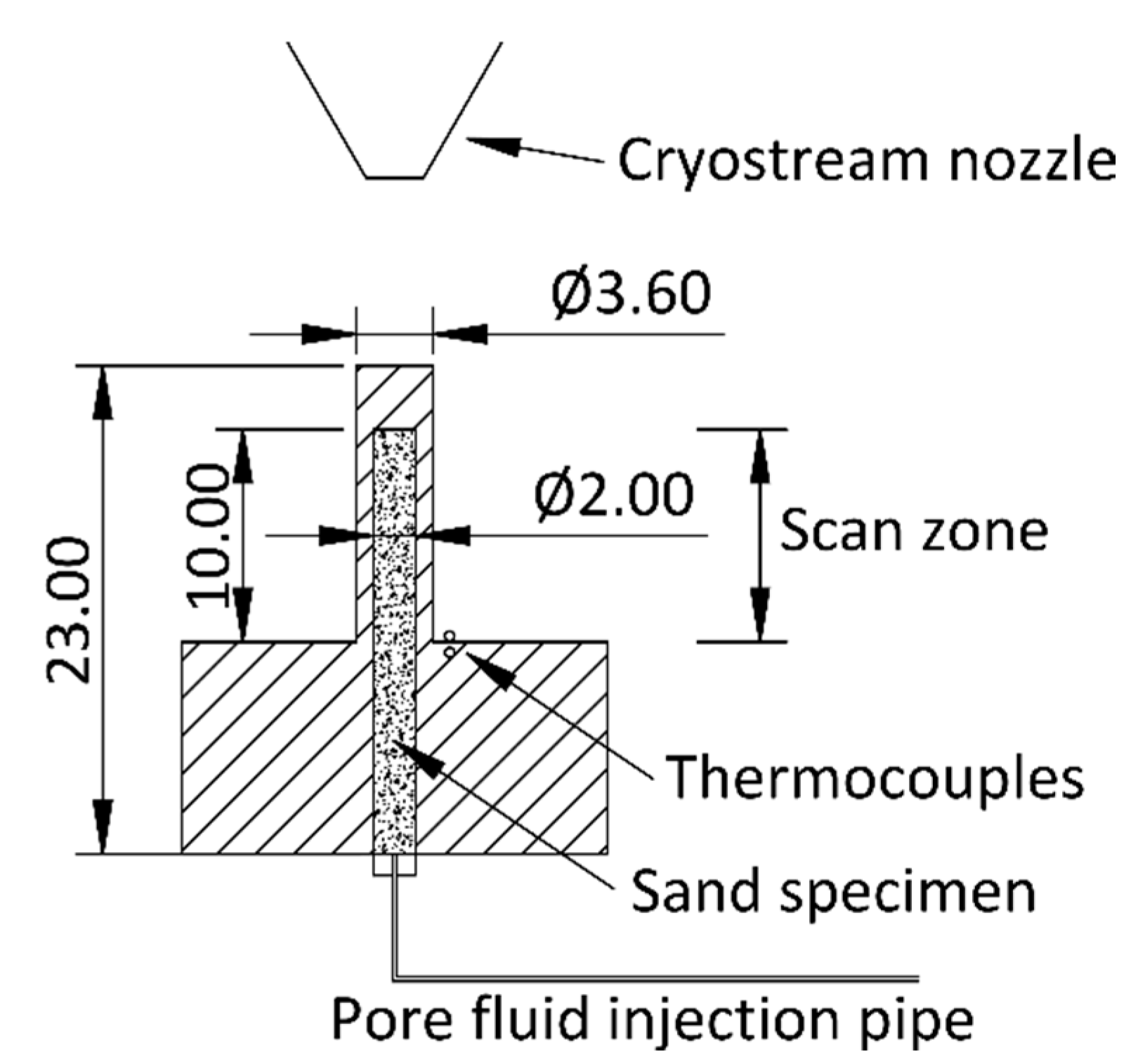
2.1.1. Set-Up and Image Acquisition
2.1.2. Tomographic Reconstruction and Post-Processing
- The application of a median filter of kernel size 3 to the absorption volume and the halving of the resulting greyscale values;
- The application of an unsharp mask filter of radius 3 and weight 0.70 to the phase contrast volume;
- The elementwise averaging of both volumes.
2.2. U-Net Segmentation
- A 3D hierarchical approach where two separate 3D U-Net models were trained to perform binary segmentations: On the sand phase vs. the others and the CH4 gas phase vs. the others;
- A 2D multi-label and multi-axis approach where a single 2D U-Net was trained to classify the three labels. The encoder section of this U-Net implementation was pre-trained on the ImageNet dataset [48], meaning that the network should only require a small amount of ‘transfer’ training in order to achieve acceptable results on new data;
- RootPainter software, which uses a graphical user interface (GUI) and human intervention by interactive corrections to train a lightweight binary 2D U-Net model.
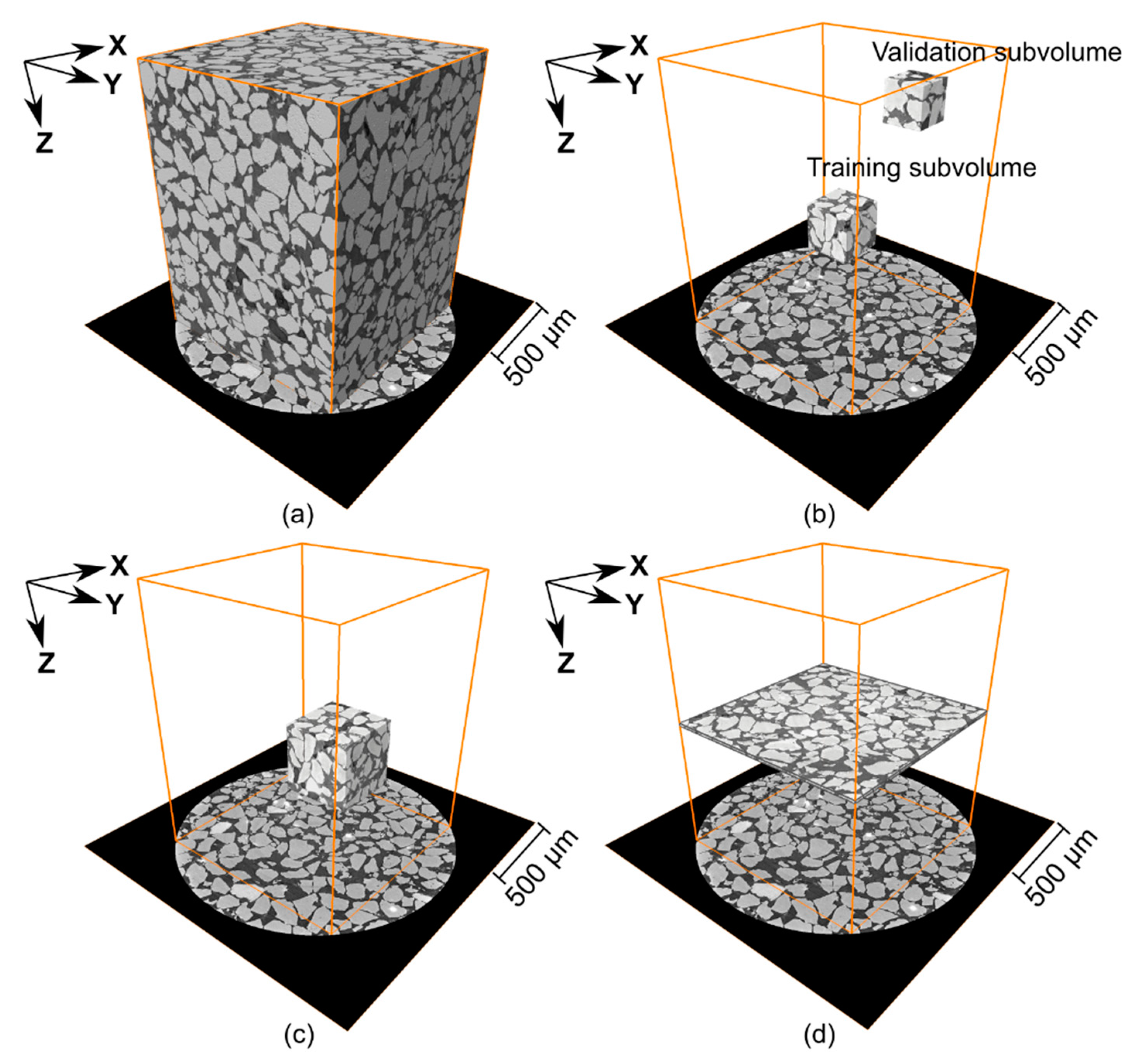
2.2.1. Training and Validation Data
2.2.2. 3D Hierarchical Segmentation
2.2.3. 2D Multi-Label Segmentation
2.2.4. RootPainter Segmentation
2.3. Thresholding and Watershed Segmentation
2.4. Quantitative Analysis
3. Results and Discussion
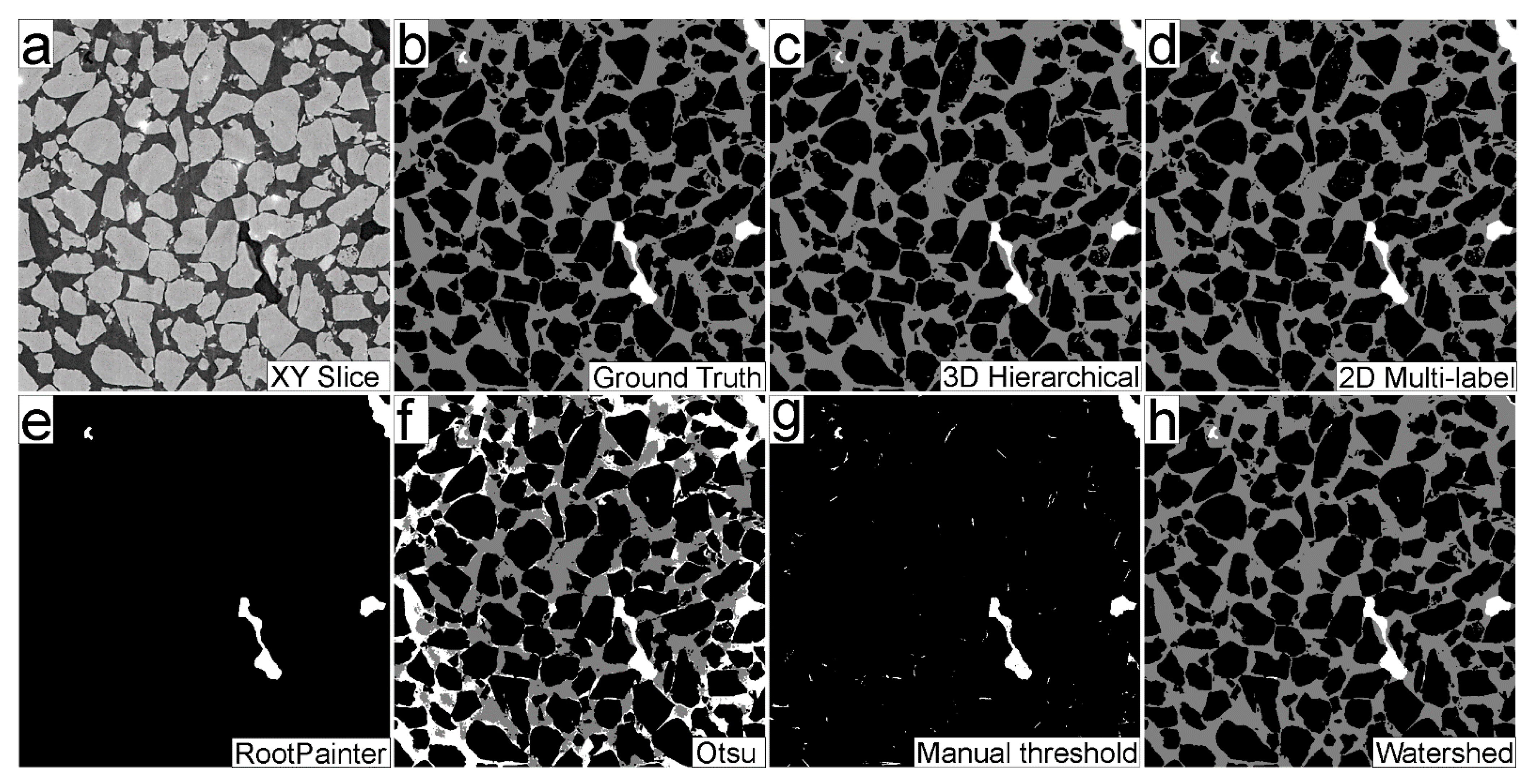
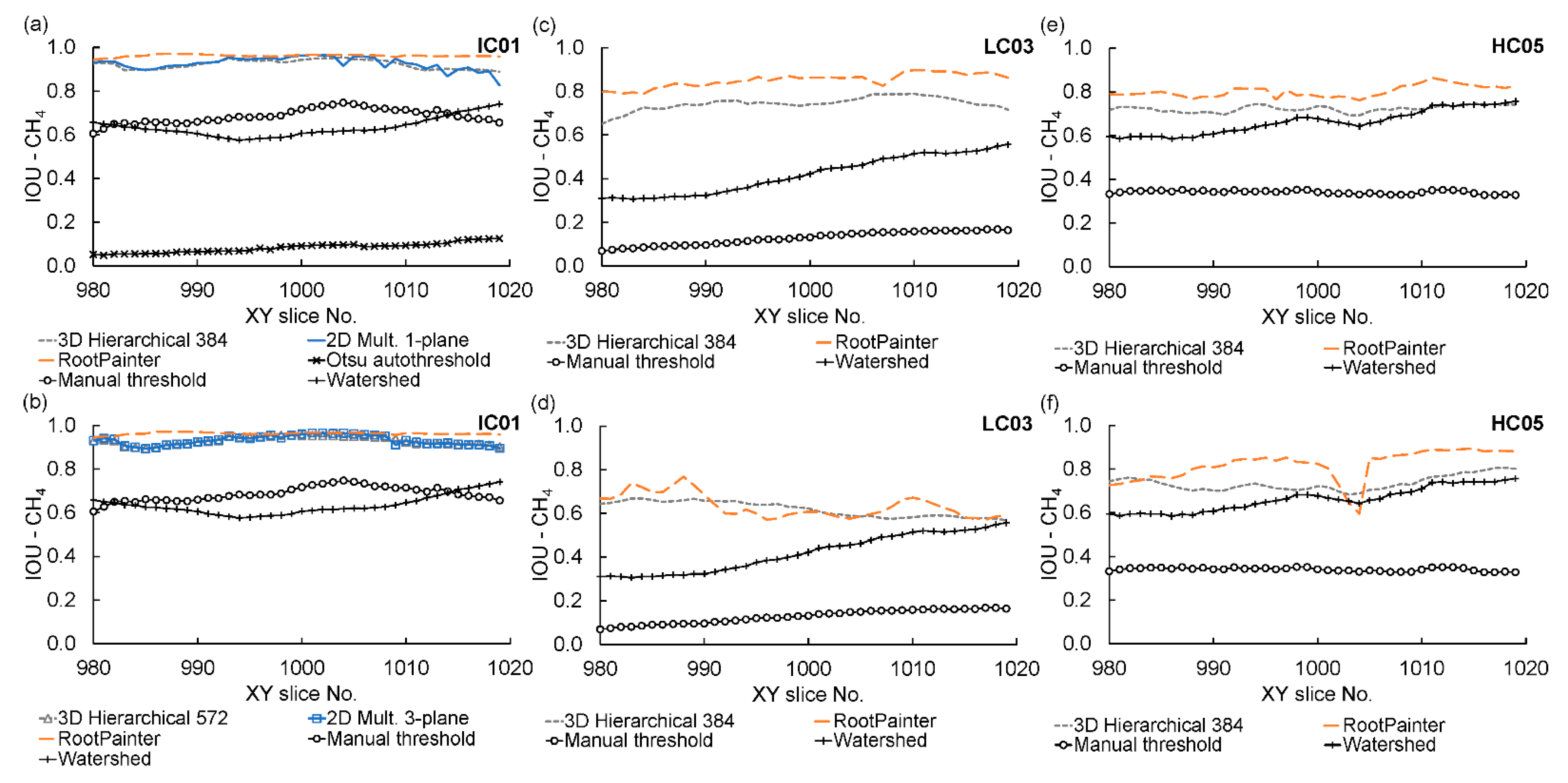
3.1. Segmentation Performance Comparison
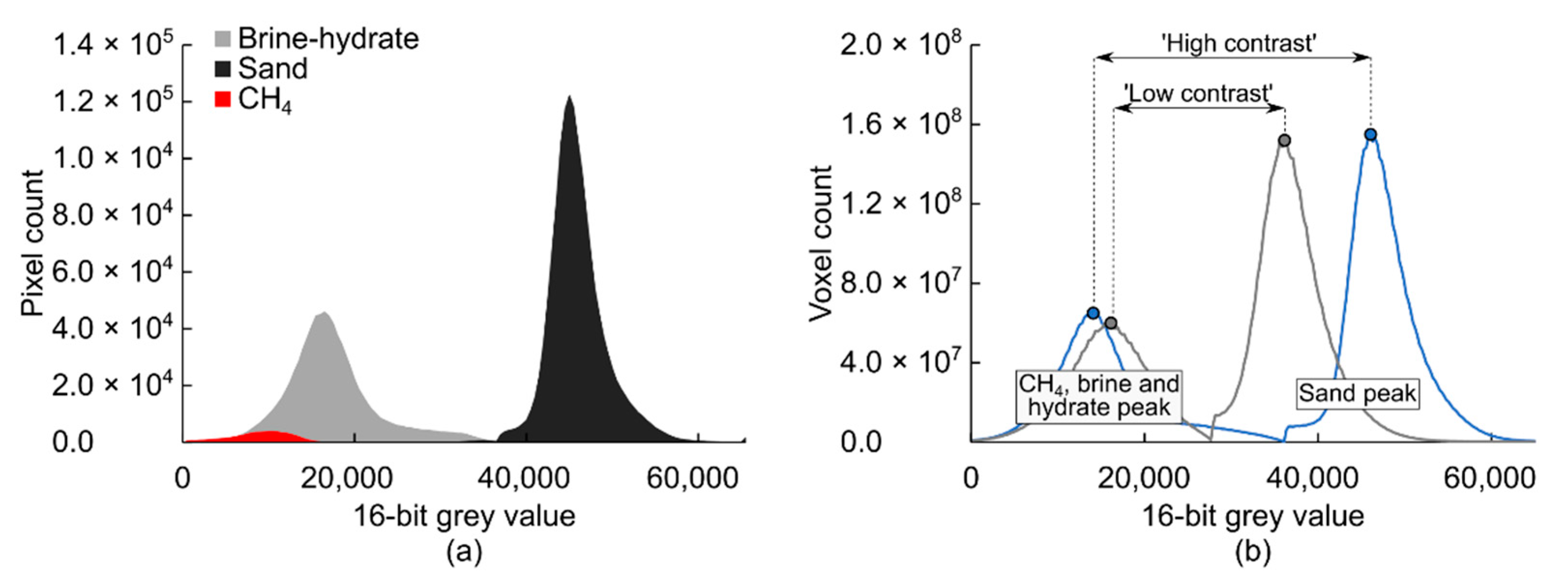
3.2. U-Net Performance on Data with Different Greyscale Contrast
3.3. U-Net Segmentation Model Generalisation across Datasets (Model Portability)
3.4. Applications and Implications
- U-Nets trained on sub-volumes of the dataset of interest are then used to segment the entire dataset, shown in Figure 10a,d. As discussed in Section 3.2, differences in greyscale contrast affect the performance of the resulting segmentation. A training sub-volume needs to be created for each scan;
- U-Nets trained on sub-volumes of a low-greyscale contrast dataset are then used to segment other ‘unknown’ datasets of higher greyscale contrast (model portability). This is presented in Figure 10e,f, corresponding to parameters derived for high-contrast dataset HC05 using segmentations produced from U-Nets trained on sub-volumes of low-contrast dataset LC03. Thus, only one training sub-volume is needed to segment multiple scans.
4. Conclusions
- For a given SXCT data set, the three U-Net deployment methodologies produced models capable of delivering segmented images of the CH4 gas phase with average IOU metrics of at least 0.74 and up to 0.93. This demonstrated that the U-Net methods used were capable of accurately identifying the CH4 gas phase using a small number of training images. RootPainter delivered marginally higher IOU metrics than the other methods but suffered from minor horizontal stripping artefacts and required more human intervention and proportionally higher computing time;
- Greyscale contrast between material phases in the different SRXCT datasets was a significant factor affecting U-Net segmentation accuracy. The lowest segmentation performance metrics corresponded to SRXCT datasets exhibiting the lowest greyscale contrast, while greater segmentation accuracy resulted from the use of higher contrast data;
- All U-Net segmentations of CH4 gas outperformed thresholding and watershed methods. However, mainstream methods proved to be more accurate at segmenting abundant, well-defined, and high-contrast features, like sand. U-Net methods are, thus, not recommended for this task;
- The ability of a U-Net model trained on a subset of one dataset to generalise and produce an accurate segmentation of a different dataset, was explored. It was found that models trained on lower-contrast images were able to produce accurate segmentations of higher-contrast data without additional training. In comparison, U-Net models trained on higher-contrast images were found to deliver poor results when used to segment lower-contrast data. ‘Portability’ was further demonstrated by accurately segmenting independent data from a different synchrotron facility without additional training. This suggests that targeted training on small amounts of ‘ground truth’ data can produce U-Net segmentation models that can be used for rapid segmentation of a large number of different datasets with additional user input or training. However, segmentation accuracy will be lower than that of a model ‘natively’ trained on subsets of the target dataset;
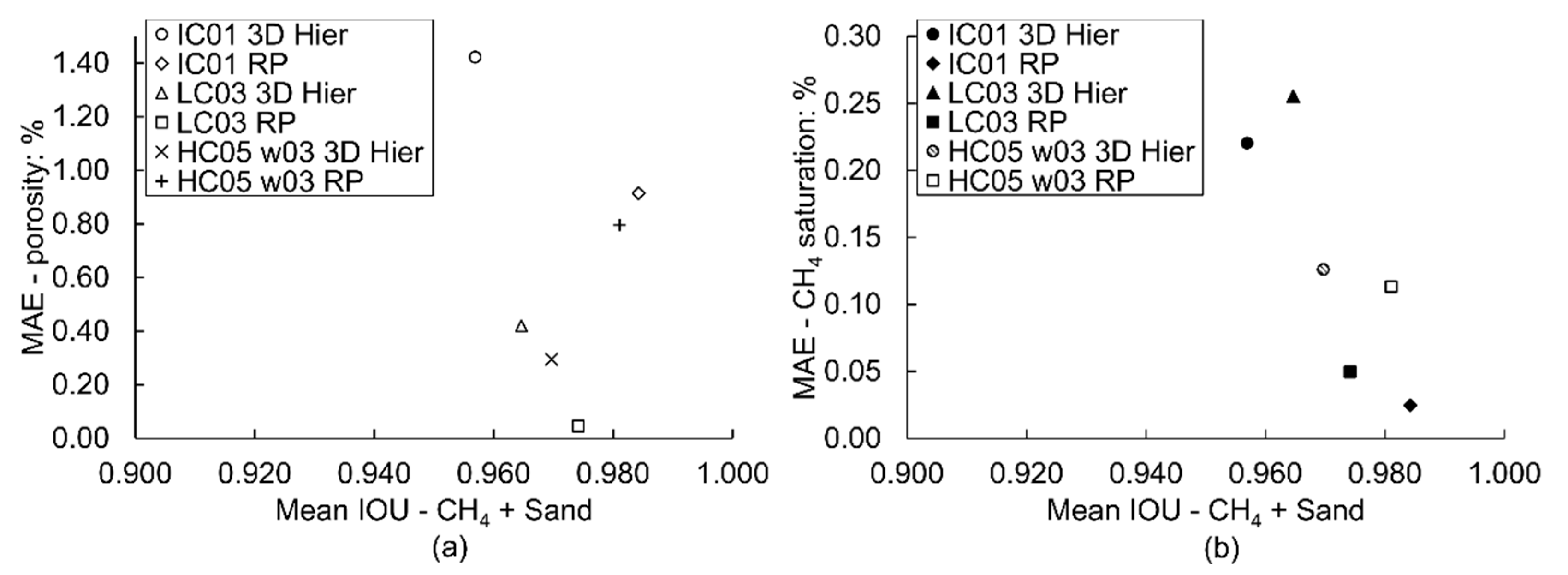
- The effect of segmentation accuracy on image-derived material parameters was investigated by calculating porosity and CH4 gas saturation profiles using U-Net segmentations. A general trend of lower mean absolute error of the derived parameter with greater segmentation accuracy was found, but the correlation exhibited some scatter. Considering that porosity, fluid saturation and other parameters are ratios between material phases, it was proposed that errors in derived parameters are not only linked to segmentation accuracy metrics but to the number of false positive and negative voxel labels of the largest phase relative to the other phases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Dean, J.F.; Middelburg, J.J.; Röckmann, T.; Aerts, R.; Blauw, L.G.; Egger, M.; Jetten, M.S.M.; de Jong, A.E.E.; Meisel, O.H.; Rasigraf, O.; et al. Methane Feedbacks to the Global Climate System in a Warmer World. Rev. Geophys. 2018, 56, 207–250. [Google Scholar] [CrossRef] [Green Version]
- IPCC. Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Press, C.U., Ed.; Intergovernmental Panel on Climate Change: Cambridge, UK; New York, NY, USA, 2013. [Google Scholar]
- Kvenvolden, K.A. Gas hydrates—Geological perspective and global change. Rev. Geophys. 1993, 31, 173–187. [Google Scholar] [CrossRef]
- James, R.H.; Bousquet, P.; Bussmann, I.; Haeckel, M.; Kipfer, R.; Leifer, I.; Niemann, H.; Ostrovsky, I.; Piskozub, J.; Rehder, G.; et al. Effects of climate change on methane emissions from seafloor sediments in the Arctic Ocean: A review. Limnol. Oceanogr. 2016, 61, S283–S299. [Google Scholar] [CrossRef] [Green Version]
- Ruppel, C.D.; Kessler, J.D. The interaction of climate change and methane hydrates. Rev. Geophys. 2017, 55, 126–168. [Google Scholar] [CrossRef]
- Sahoo, S.K.; Marín-Moreno, H.; North, L.J.; Falcon-Suarez, I.; Madhusudhan, B.N.; Best, A.I.; Minshull, T.A. Presence and Consequences of Coexisting Methane Gas With Hydrate Under Two Phase Water-Hydrate Stability Conditions. J. Geophys. Res. Solid Earth 2018, 123, 3377–3390. [Google Scholar] [CrossRef]
- Yokohama, T.; Nakayama, E.; Kuwano, S.; Saito, H. Relationship between seismic wave velocities, eletric resistivities and saturation ratio of methane hydrate using core samples in laboratory experiments. In Proceedings of the 7th International Conference on Gas Hydrates, Edinburgh, UK, 17–21 July 2011; pp. 1830–1833. [Google Scholar]
- Sahoo, S.K.; Madhusudhan, B.N.; Marín-Moreno, H.; North, L.J.; Ahmed, S.; Falcon-Suarez, I.H.; Minshull, T.A.; Best, A.I. Laboratory Insights into the Effect of Sediment-Hosted Methane Hydrate Morphology on Elastic Wave Velocity from Time-Lapse 4-D Synchrotron X-Ray Computed Tomography. Geochem. Geophys. Geosyst. 2018, 19, 4502–4521. [Google Scholar] [CrossRef] [Green Version]
- Moridis, G.; Collett, T.S.; Pooladi-Darvish, M.; Hancock, S.H.; Santamarina, C.; Boswell, R.; Kneafsey, T.J.; Rutqvist, J.; Kowalsky, M.B.; Reagan, M.T.; et al. Challenges, Uncertainties, and Issues Facing Gas Production from Gas-Hydrate Deposits. SPE Reserv. Eval. Eng. 2011, 14, 76–112. [Google Scholar] [CrossRef] [Green Version]
- Saunois, M.; Stavert, A.R.; Poulter, B.; Bousquet, P.; Canadell, J.G.; Jackson, R.B.; Raymond, P.A.; Dlugokencky, E.J.; Houweling, S.; Patra, P.K.; et al. The Global Methane Budget 2000–2017. Earth Syst. Sci. Data 2020, 12, 1561–1623. [Google Scholar] [CrossRef]
- Madhusudhan, B.N.; Clayton, C.R.I.; Priest, J.A. The Effects of Hydrate on the Strength and Stiffness of Some Sands. J. Geophys. Res. Solid Earth 2019, 124, 65–75. [Google Scholar] [CrossRef]
- Song, Y.; Luo, T.; Madhusudhan, B.N.; Sun, X.; Liu, Y.; Kong, X.; Li, Y. Strength behaviors of CH4 hydrate-bearing silty sediments during thermal decomposition. J. Nat. Gas Sci. Eng. 2019, 72, 103031. [Google Scholar] [CrossRef]
- Maslin, M.; Owen, M.; Betts, R.; Day, S.; Jones, T.D.; Ridgwell, A. Gas hydrates: Past and future geohazard? Philos. Trans. R. Soc. A 2010, 368, 2369–2393. [Google Scholar] [CrossRef] [PubMed]
- Mienert, J. Methane Hydrate and Submarine Slides. In Encyclopedia of Ocean Sciences, 2nd ed.; Steele, J.H., Ed.; Academic Press: Oxford, UK, 2009; pp. 790–798. [Google Scholar]
- Vanneste, M.; Sultan, N.; Garziglia, S.; Forsberg, C.F.; L’Heureux, J.-S. Seafloor instabilities and sediment deformation processes: The need for integrated, multi-disciplinary investigations. Mar. Geol. 2014, 352, 183–214. [Google Scholar] [CrossRef] [Green Version]
- Holland, M.; Schultheiss, P. Comparison of methane mass balance and X-ray computed tomographic methods for calculation of gas hydrate content of pressure cores. Mar. Pet. Geol. 2014, 58, 168–177. [Google Scholar] [CrossRef]
- Kerkar, P.B.; Horvat, K.; Jones, K.W.; Mahajan, D. Imaging methane hydrates growth dynamics in porous media using synchrotron X-ray computed microtomography. Geochem. Geophys. Geosyst. 2014, 15, 4759–4768. [Google Scholar] [CrossRef]
- Lei, L.; Seol, Y.; Jarvis, K. Pore-Scale Visualization of Methane Hydrate-Bearing Sediments With Micro-CT. Geophys. Res. Lett. 2018, 45, 5417–5426. [Google Scholar] [CrossRef]
- Fonseca, J.; O’Sullivan, C.; Coop, M.R. Image Segmentation Techniques for Granular Materials. In Powders and Grains: Proceedings of the 6th International Conference on Micromechanics of Granular Media; American Institute of Physics: Melville, NY, USA, 2009; pp. 223–226. [Google Scholar]
- Iassonov, P.; Gebrenegus, T.; Tuller, M. Segmentation of X-ray computed tomography images of porous materials: A crucial step for characterization and quantitative analysis of pore structures. Water Resour. Res. 2009, 45. [Google Scholar] [CrossRef]
- Rogowska, J. 5—Overview and Fundamentals of Medical Image Segmentation. In Handbook of Medical Imaging; Bankman, I.N., Ed.; Academic Press: San Diego, CA, USA, 2000; pp. 69–85. [Google Scholar]
- Zhang, X.; Jia, F.; Luo, S.; Liu, G.; Hu, Q. A marker-based watershed method for X-ray image segmentation. Comput. Methods Programs Biomed. 2014, 113, 894–903. [Google Scholar] [CrossRef]
- Baveye, P.C.; Laba, M.; Otten, W.; Bouckaert, L.; Dello Sterpaio, P.; Goswami, R.R.; Grinev, D.; Houston, A.; Hu, Y.; Liu, J.; et al. Observer-dependent variability of the thresholding step in the quantitative analysis of soil images and X-ray microtomography data. Geoderma 2010, 157, 51–63. [Google Scholar] [CrossRef]
- Koyuncu, C.F.; Arslan, S.; Durmaz, I.; Cetin-Atalay, R.; Gunduz-Demir, C. Smart Markers for Watershed-Based Cell Segmentation. PLoS ONE 2012, 7, e48664. [Google Scholar] [CrossRef]
- Brunke, O.; Brockdorf, K.; Drews, S.; Müller, B.; Donath, T.; Herzen, J.; Beckmann, F. Comparison between x-ray tube-based and synchrotron radiation-based uCT. In Proceedings of SPIE 7078, Optical Engineering + Applications; SPIE: Bellingham, WA, USA, 2008. [Google Scholar]
- Kong, D.; Fonseca, J. Quantification of the morphology of shelly carbonate sands using 3D images. Géotechnique 2018, 68, 249–261. [Google Scholar] [CrossRef]
- Chauhan, S.; Rühaak, W.; Anbergen, H.; Kabdenov, A.; Freise, M.; Wille, T.; Sass, I. Phase segmentation of X-ray computer tomography rock images using machine learning techniques: An accuracy and performance study. Solid Earth 2016, 7, 1125–1139. [Google Scholar] [CrossRef] [Green Version]
- Chauhan, S.; Rühaak, W.; Khan, F.; Enzmann, F.; Mielke, P.; Kersten, M.; Sass, I. Processing of rock core microtomography images: Using seven different machine learning algorithms. Comput. Geosci. 2016, 86, 120–128. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Douarre, C.; Schielein, R.; Frindel, C.; Gerth, S.; Rousseau, D. Transfer Learning from Synthetic Data Applied to Soil–Root Segmentation in X-Ray Tomography Images. J. Imaging 2018, 4, 65. [Google Scholar] [CrossRef] [Green Version]
- Karimpouli, S.; Tahmasebi, P. Segmentation of digital rock images using deep convolutional autoencoder networks. Comput. Geosci. 2019, 126, 142–150. [Google Scholar] [CrossRef]
- Phan, J.; Ruspini, L.C.; Lindseth, F. Automatic segmentation tool for 3D digital rocks by deep learning. Sci. Rep. 2021, 11, 19123. [Google Scholar] [CrossRef]
- Varfolomeev, I.; Yakimchuk, I.; Safonov, I. An Application of Deep Neural Networks for Segmentation of Microtomographic Images of Rock Samples. Computers 2019, 8, 72. [Google Scholar] [CrossRef] [Green Version]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015. Lecture Notes in Computer Science, Vol 9351; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Brown, W.S. Physical Properties of Seawater. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Wadeson, N.; Basham, M.; Parsons, A.; Kazantsev, D.; Vo, N.T.; Schoonjans, T.; Pérez-Juárez, E.; Taylor, M.; Srikanth, N.; Nixon, D.; et al. DiamondLightSource/Savu, Version 2.4; 2019. Available online: https://doi.org/10.5281/zenodo.3541873 (accessed on 20 October 2020).
- Atwood, R.C.; Bodey, A.J.; Price, S.W.T.; Basham, M.; Drakopoulos, M. A high-throughput system for high-quality tomographic reconstruction of large datasets at Diamond Light Source. Philos. Trans. R. Soc. A 2015, 373, 2369–2393. [Google Scholar] [CrossRef]
- Wadeson, N.; Basham, M. Savu: A Python-based, MPI Framework for Simultaneous Processing of Multiple, N-dimensional, Large Tomography Datasets. arXiv 2016, arXiv:1610.08015. [Google Scholar]
- Paganin, D.; Mayo, S.C.; Gureyev, T.E.; Miller, P.R.; Wilkins, S.W. Simultaneous phase and amplitude extraction from a single defocused image of a homogeneous object. J. Microsc. 2002, 206, 33–40. [Google Scholar] [CrossRef]
- Ramachandran, G.N.; Lakshminarayanan, A.V. Three-dimensional reconstruction from radiographs and electron micrographs: Application of convolutions instead of Fourier transforms. Proc. Natl. Acad. Sci. USA 1971, 68, 2236–2240. [Google Scholar] [CrossRef] [PubMed]
- van Aarle, W.; Palenstijn, W.J.; Cant, J.; Janssens, E.; Bleichrodt, F.; Dabravolski, A.; De Beenhouwer, J.; Joost Batenburg, K.; Sijbers, J. Fast and flexible X-ray tomography using the ASTRA toolbox. Opt. Express 2016, 24, 25129–25147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Titarenko, V.; Bradley, R.; Martin, C.; Withers, P.; Titarenko, S. Regularization Methods for Inverse Problems in X-ray Tomography. In Proceedings of the SPIE Optical Engineering + Applications; SPIE: Bellingham, WA, USA, 2010. [Google Scholar]
- Vo, N.T.; Drakopoulos, M.; Atwood, R.C.; Reinhard, C. Reliable method for calculating the center of rotation in parallel-beam tomography. Opt. Express 2014, 22, 19078–19086. [Google Scholar] [CrossRef] [PubMed]
- Schindelin, J.; Arganda-Carreras, I.; Frise, E.; Kaynig, V.; Longair, M.; Pietzsch, T.; Preibisch, S.; Rueden, C.; Saalfeld, S.; Schmid, B.; et al. Fiji: An open-source platform for biological-image analysis. Nat. Methods 2012, 9, 676–682. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. NIH Image to ImageJ: 25 years of image analysis. Nat. Methods 2012, 9, 671–675. [Google Scholar] [CrossRef]
- Hsieh, J. Computed Tomography: Principles, Design, Artifacts, and Recent Advances, 3rd ed.; SPIE: Bellingham, WA, USA, 2015. [Google Scholar]
- Kalender, W.A. Computed Tomography. Fundamentals, System Technology, Image Quality, Applications; Publicis Publishing: Erlangen, Germany, 2011. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Alvarez-Borges, F.J.; King, O.N.F.; Madhusudhan, B.N.; Ahmed, S.I. Tomography data of methane-bearing sand used to investigate U-Net segmentation methods [Dataset]. Zenodo 2021. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Wallach, H., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 8024–8035. [Google Scholar]
- Lee, K.; Zung, J.; Li, P.; Jain, V.; Seung, H.S. Superhuman Accuracy on the SNEMI3D Connectomics Challenge. arXiv 2017, arXiv:1706.00120. [Google Scholar]
- Wolny, A.; Cerrone, L.; Vijayan, A.; Tofanelli, R.; Barro, A.V.; Louveaux, M.; Wenzl, C.; Strauss, S.; Wilson-Sánchez, D.; Lymbouridou, R.; et al. Accurate and versatile 3D segmentation of plant tissues at cellular resolution. eLife 2020, 9, e57613. [Google Scholar] [CrossRef] [PubMed]
- Pérez-García, F.; Sparks, R.; Ourselin, S. TorchIO: A Python library for efficient loading, preprocessing, augmentation and patch-based sampling of medical images in deep learning. arXiv 2020, arXiv:2003.04696. [Google Scholar] [CrossRef]
- Loshchilov, I.; Hutter, F. Decoupled Weight Decay Regularization. arXiv 2019, arXiv:1711.05101. [Google Scholar]
- Smith, L.N. Cyclical Learning Rates for Training Neural Networks. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision, Santa Rosa, CA, USA, 24–31 March 2017; pp. 464–472. [Google Scholar]
- King, O.N.F.; Alvarez-Borges, F.J. Gas Hydrate Segmentation Using U-Nets. Code Repository. 2021. Available online: https://github.com/DiamondLightSource/gas-hydrate-segmentation-unets (accessed on 14 April 2022).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Howard, J.; Gugger, S. Fastai: A Layered API for Deep Learning. Information 2020, 11, 108. [Google Scholar] [CrossRef] [Green Version]
- Tun, W.M.; Poologasundarampillai, G.; Bischof, H.; Nye, G.; King, O.N.F.; Basham, M.; Tokudome, Y.; Lewis, R.M.; Johnstone, E.D.; Brownbill, P.; et al. A massively multi-scale approach to characterising tissue architecture by synchrotron micro-CT applied to the human placenta. bioRxiv 2020, 18, 20210140. [Google Scholar] [CrossRef]
- Smith, A.G.; Ørting, S. RootPainter 0.2.5. 2020. Available online: https://github.com/Abe404/root_painter (accessed on 15 March 2022).
- Smith, A.G.; Han, E.; Petersen, J.; Olsen, N.A.F.; Giese, C.; Athmann, M.; Dresbøll, D.B.; Thorup-Kristensen, K. RootPainter: Deep Learning Segmentation of Biological Images with Corrective Annotation. bioRxiv 2020. [Google Scholar] [CrossRef] [Green Version]
- Smith, A.G.; Petersen, J.; Selvan, R.; Rasmussen, C.R. Segmentation of roots in soil with U-Net. Plant Methods 2020, 16, 13. [Google Scholar] [CrossRef] [Green Version]
- Gonda, F.; Kaynig, V.; Jones, T.R.; Haehn, D.; Lichtman, J.W.; Parag, T.; Pfister, H. ICON: An interactive approach to train deep neural networks for segmentation of neuronal structures. In Proceedings of the IEEE 14th International Symposium on Biomedical Imaging, Melbourne, Australia, 18–21 April 2017. [Google Scholar]
- Bradski, G. The OpenCV Library. 2000. Available online: https://www.drdobbs.com/open-source/the-opencv-library/184404319 (accessed on 15 April 2021).
- Paris, S.; Kornprobst, P.; Tumblin, J.; Durand, F. Bilateral Filtering: Theory and Applications. Found. Trends Comput. Graph. Vis. 2009, 4, 1–73. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Legland, D.; Arganda-Carreras, I.; Andrey, P. MorphoLibJ: Integrated library and plugins for mathematical morphology with ImageJ. Bioinformatics 2016, 32, 3532–3534. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karabağ, C.; Jones, M.L.; Peddie, C.J.; Weston, A.E.; Collinson, L.M.; Reyes-Aldasoro, C.C. Semantic segmentation of HeLa cells: An objective comparison between one traditional algorithm and four deep-learning architectures. PLoS ONE 2020, 15, e0230605. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. On threshold selection using clustering criteria. IEEE Trans. Syst. Man Cybern. 1985, 5, 652–655. [Google Scholar] [CrossRef]
- Lee, S.U.; Yoon Chung, S.; Park, R.H. A comparative performance study of several global thresholding techniques for segmentation. Comput. Vis. Graph. Image Process. 1990, 52, 171–190. [Google Scholar] [CrossRef]
- He, K.; Girshick, R.; Dollar, P. Rethinking ImageNet Pre-Training. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of South Korea, 27 October–2 November 2019; pp. 4918–4927. [Google Scholar]
- Matula, S.; Báťková, K.; Legese, W.L. Laboratory Performance of Five Selected Soil Moisture Sensors Applying Factory and Own Calibration Equations for Two Soil Media of Different Bulk Density and Salinity Levels. Sensors 2016, 16, 1912. [Google Scholar] [CrossRef] [PubMed]
- Missimer, T.M.; Lopez, O.M. Laboratory Measurement of Total Porosity in Unconsolidated Quartz Sand by Two Integrated Methods. J. Geol. Geophys. 2018, 7, 1000448. [Google Scholar] [CrossRef]
- Péron, H.; Hueckel, T.; Laloui, L. An Improved Volume Measurement for Determining Soil Water Retention Curves. Geotech. Test. J. 2007, 30, GTJ100167. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Time at 2 °C (h) | Projections | Exposure Time per Projection (ms) |
|---|---|---|---|
| IC01 | 0.00 | 1501 | 200 |
| IC02 | 1.53 | 1501 | 200 |
| LC03 | 5.38 | 3001 | 30 |
| LC04 | 10.72 | 3001 | 30 |
| HC05 | 20.77 | 1501 | 30 |
| HC06 | 30.02 | 1501 | 30 |
| Subvolume Name | Usage | Size (Voxels) | X | Y | Z | U-Net Method |
|---|---|---|---|---|---|---|
| 3D validation | validation | 256 × 256 × 256 | 1133 | 1753 | 50 | 3D hierarchical |
| 3D training | training | 384 × 384 × 384 | 1343 | 943 | 1158 | 3D hierarchical |
| 2D learning | training & validation | 572 × 572 × 572 | 1343 | 943 | 1158 | RootPainter; 2D multilabel; 3D hierarchical * |
| Training Data Source | Labels | Training Epochs | Final Training Loss (BCE) | Final Validation Loss (BCE) | Final Validation Metric (Mean IOU) |
|---|---|---|---|---|---|
| IC01–3D training subvolume | CH4 vs. background | 94 | 0.0313 | 0.0237 | 0.935 |
| Sand vs. background | 83 | 0.0317 | 0.0332 | 0.977 | |
| IC02–2D learning subvolume | CH4 vs. background | 84 | 0.0055 | 0.0307 | 0.918 |
| Sand vs. background | 85 | 0.0426 | 0.0290 | 0.980 | |
| LC03–3D training subvolume | CH4 vs. background | 82 | 0.0178 | 0.0371 | 0.759 |
| Sand vs. background | 69 | 0.0305 | 0.0471 | 0.957 |
| Training Data Source | Labels | Training Epochs | Final Training Loss (CE) | Final Validation Loss (CE) | Final Validation Metric (%) * |
|---|---|---|---|---|---|
| IC02–2D learning subvolume | Single-axis (pre-trained) | 15 | 0.0200 | 0.0140 | 99.48 |
| Multi-axis (pre-trained) | 15 | 0.0190 | 0.0120 | 99.59 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvarez-Borges, F.J.; King, O.N.F.; Madhusudhan, B.N.; Connolley, T.; Basham, M.; Ahmed, S.I. Comparison of Methods to Segment Variable-Contrast XCT Images of Methane-Bearing Sand Using U-Nets Trained on Single Dataset Sub-Volumes. Methane 2023, 2, 1-23. https://doi.org/10.3390/methane2010001
Alvarez-Borges FJ, King ONF, Madhusudhan BN, Connolley T, Basham M, Ahmed SI. Comparison of Methods to Segment Variable-Contrast XCT Images of Methane-Bearing Sand Using U-Nets Trained on Single Dataset Sub-Volumes. Methane. 2023; 2(1):1-23. https://doi.org/10.3390/methane2010001
Chicago/Turabian StyleAlvarez-Borges, Fernando J., Oliver N. F. King, Bangalore N. Madhusudhan, Thomas Connolley, Mark Basham, and Sharif I. Ahmed. 2023. "Comparison of Methods to Segment Variable-Contrast XCT Images of Methane-Bearing Sand Using U-Nets Trained on Single Dataset Sub-Volumes" Methane 2, no. 1: 1-23. https://doi.org/10.3390/methane2010001