
Switching Kalman Filtering-Based Corrosion Detection and Prognostics for Offshore Wind-Turbine Structures



Abstract
:1. Introduction
2. Bayesian Filtering
2.1. Kalman Filtering
2.2. Extensions of Kalman Filtering
3. Proposed Methodology
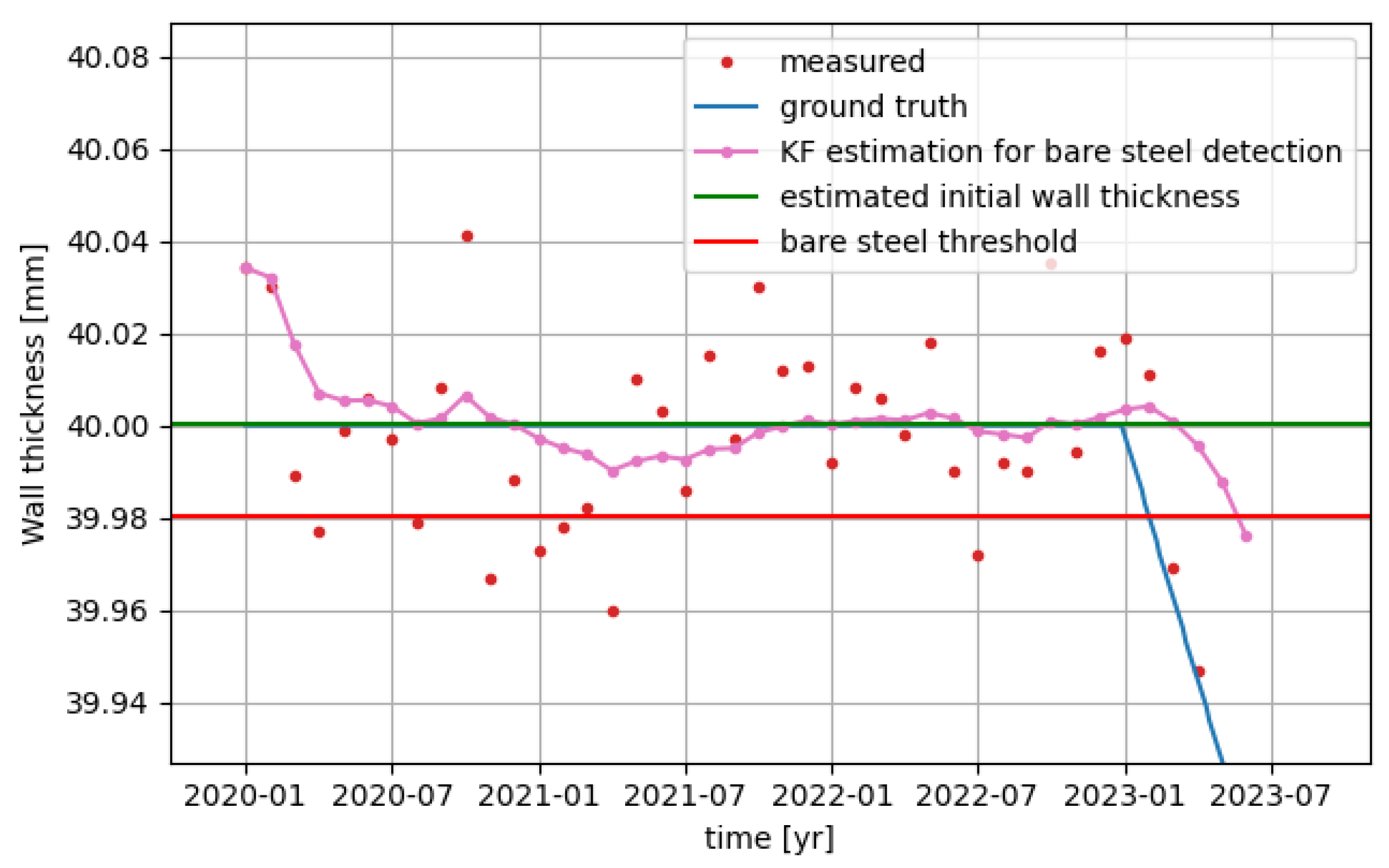
3.1. Corrosion Detection
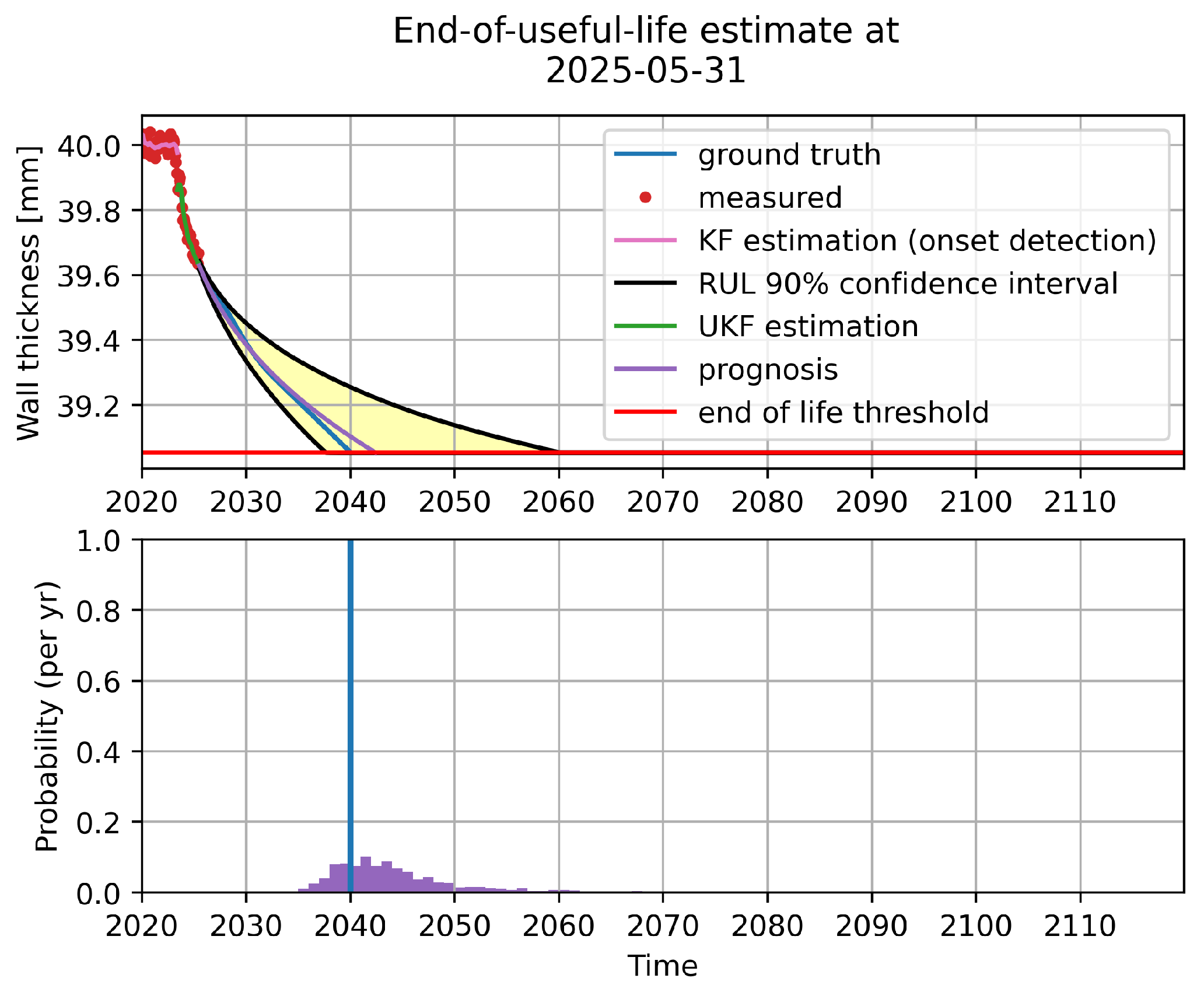
3.2. Corrosion Prognosis
3.2.1. Prognosis Algorithms
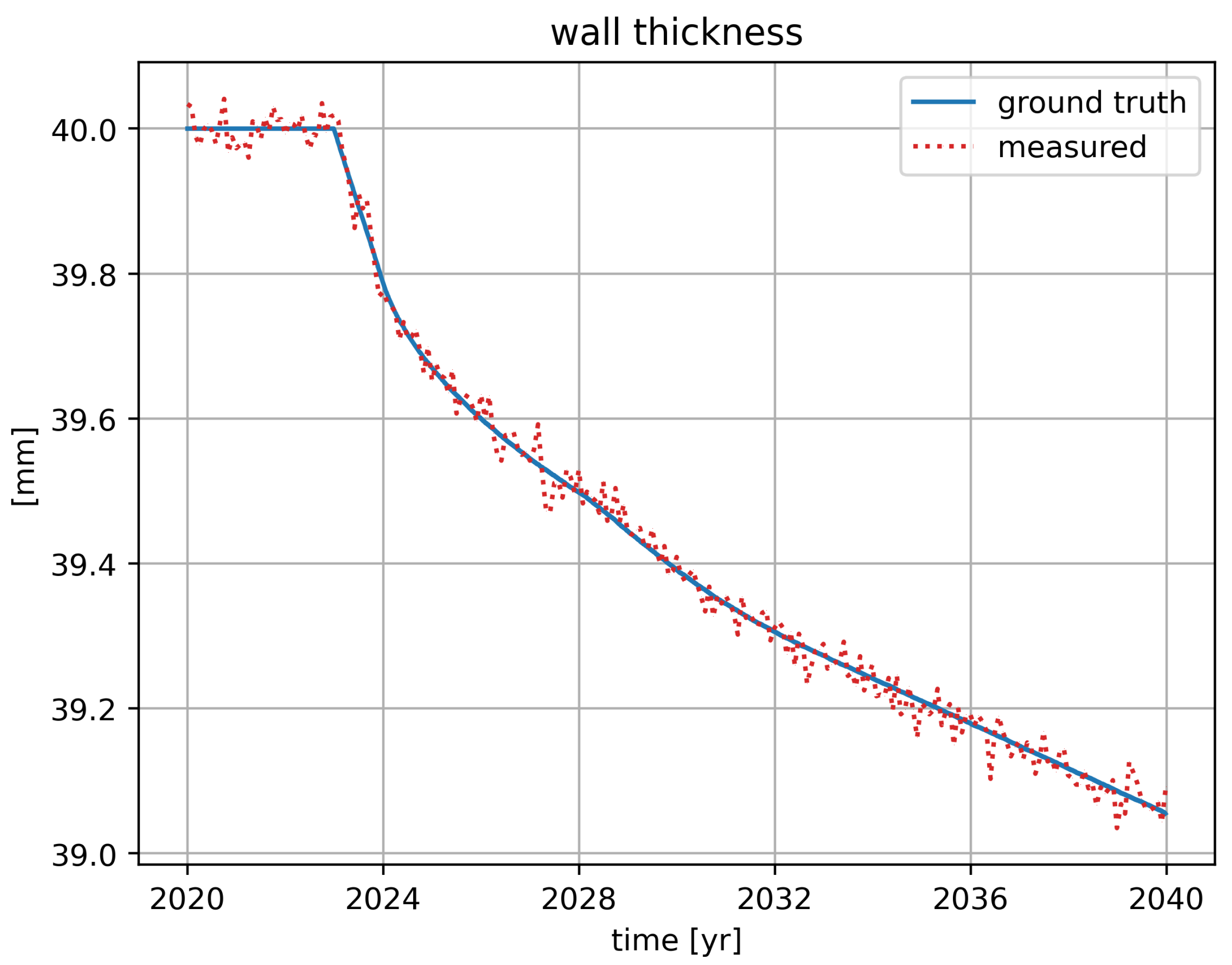
3.2.2. Wall Thickness Estimation during Steel Corrosion
- Linear corrosion model;
- Power-law corrosion model;
- Bi-modal corrosion model.
3.2.3. Implementation
Linear Corrosion Model
Bi-Modal and Power-Law Corrosion Models
Model Complexitity vs. State Estimation
4. Results
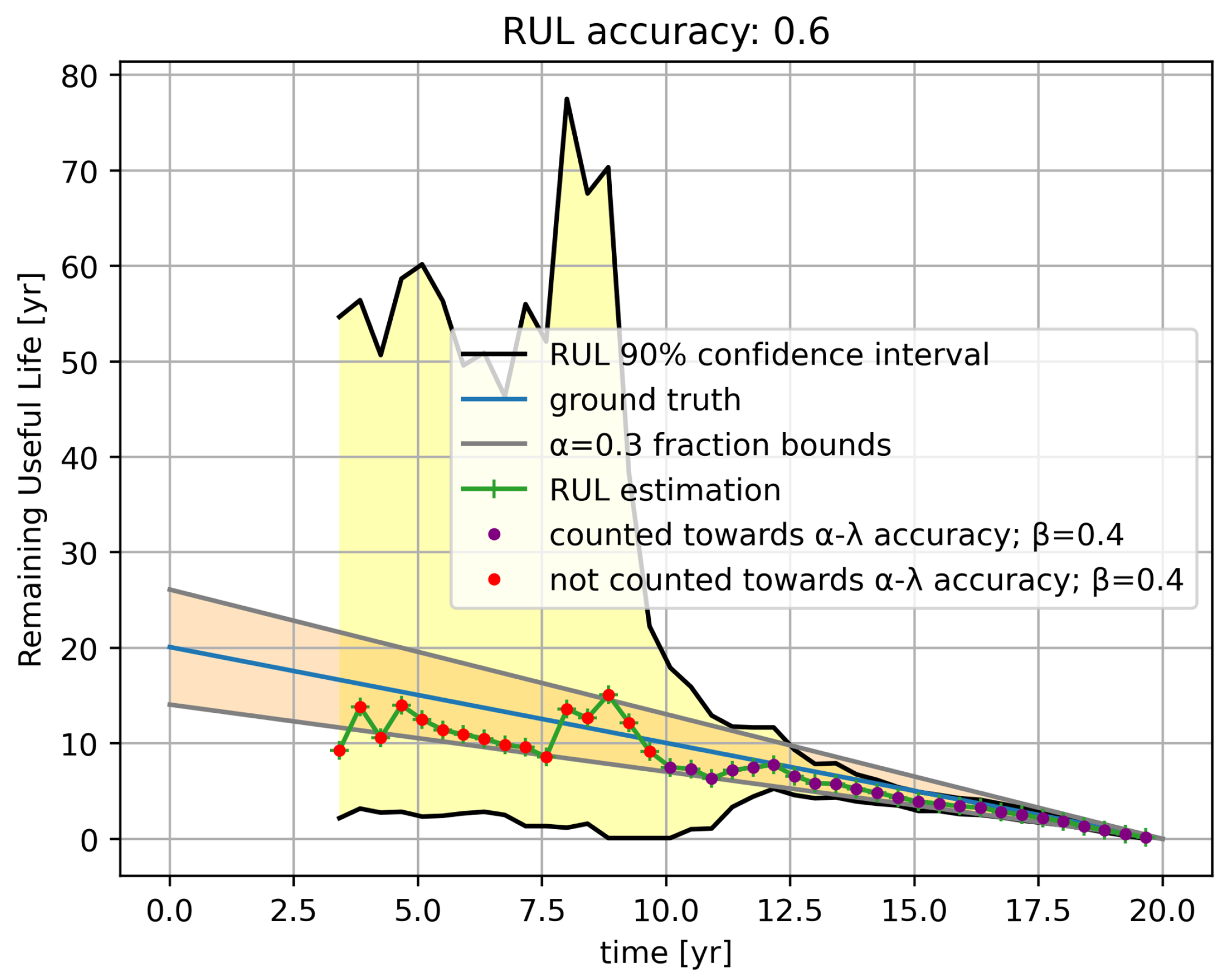
4.1. Performance Metric
4.2. Datasets
4.3. Corrosion Detection
4.4. Corrosion Prognosis
4.5. Accuracy of Remaining Useful Life Estimates
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coronado, D.; Fischer, K. Condition Monitoring of Wind Turbines: State of the Art, User Experience and Recommendations; Technical Report; Fraunhofer Institute for Wind Energy and Energy System Technology (Fraunhofer IWES): Bremerhaven, Germany, 2015; Available online: https://www.vgb.org/vgbmultimedia/383_Final+report-p-9786.pdf (accessed on 5 October 2022).
- Martinez-Luengo, M.; Kolios, A.; Wang, L. Structural health monitoring of offshore wind turbines: A review through the Statistical Pattern Recognition Paradigm. Renew. Sustain. Energy Rev. 2016, 64, 91–105. [Google Scholar] [CrossRef] [Green Version]
- Adedipe, O.; Brennan, F.; Kolios, A. Review of corrosion fatigue in offshore structures: Present status and challenges in the offshore wind sector. Renew. Sustain. Energy Rev. 2016, 61, 141–154. [Google Scholar] [CrossRef]
- Watereye Consortium. Watereye Project Website. 2022. Available online: https://watereye-project.eu/ (accessed on 5 October 2022).
- Thibbotuwa, U.C.; Cortés, A.; Irizar, A. Ultrasound-Based Smart Corrosion Monitoring System for Offshore Wind Turbines. Appl. Sci. 2022, 12, 808. [Google Scholar] [CrossRef]
- Verhelst, J.; Coudron, I.; Ompusunggu, A.P. SCADA-Compatible and Scaleable Visualization Tool for Corrosion Monitoring of Offshore Wind Turbine Structures. Appl. Sci. 2022, 12, 1762. [Google Scholar] [CrossRef]
- Ahuir-Torres, J.I.; Bausch, N.; Farrar, A.; Webb, S.; Simandjuntak, S.; Nash, A.; Thomas, B.; Muna, J.; Jonsson, C.; Mathew, D. Benchmarking parameters for remote electrochemical corrosion detection and monitoring of offshore wind turbine structures. Wind. Energy 2019, 22, 857–876. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Hajj, M.; Bao, Y. Review of robot-based damage assessment for offshore wind turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Chookah, M.; Nuhi, M.; Modarres, M. A probabilistic physics-of-failure model for prognostic health management of structures subject to pitting and corrosion-fatigue. Reliab. Eng. Syst. Saf. 2011, 96, 1601–1610. [Google Scholar] [CrossRef]
- Vachtsevanos, G. Corrosion Diagnostic and Prognostic Technologies. In Corrosion Processes: Sensing, Monitoring, Data Analytics, Prevention/Protection, Diagnosis/Prognosis and Maintenance Strategies; Vachtsevanos, G., Natarajan, K.A., Rajamani, R., Sandborn, P., Eds.; Springer: Cham, Switzerland, 2020; pp. 231–311. [Google Scholar] [CrossRef]
- Rommetveit, T.; Johnsen, R.; Johansen, T.F.; Baltzersen, Ø. High Resolution Ultrasound Wall Thickness Measurements through Polyester Coating and Real-Time Process Control. In Proceedings of the Corrosion 2009, Atlanta, GA, USA, 22–26 March 2009; NACE International: San Diego, CA, USA, 2009. [Google Scholar]
- Rommetveit, T.; Johansen, T.F.; Johnsen, R. A Combined Approach for High-Resolution Corrosion Monitoring and Temperature Compensation Using Ultrasound. IEEE Trans. Instrum. Meas. 2010, 59, 2843–2853. [Google Scholar] [CrossRef]
- Vásquez, S.; Verhelst, J.; Brijder, R.; Ompusunggu, A. Corrosion Detection, Prognosis and Decision Support Tool for Offshore Wind Turbine Structures. Wind 2022, 2, 747–765. [Google Scholar] [CrossRef]
- Särkkä, S. Bayesian Filtering and Smoothing; Institute of Mathematical Statistics (IMS) Textbooks; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar] [CrossRef]
- Brijder, R.; Hagen, C.H.M.; Cortés, A.; Irizar, A.; Thibbotuwa, U.C.; Helsen, S.; Vásquez, S.; Ompusunggu, A.P. Review of corrosion monitoring and prognostics in offshore wind turbine structures: Current status and feasible approaches. Front. Energy Res. 2022, 10, 991343. [Google Scholar] [CrossRef]
- Melchers, R.E. Progress in developing realistic corrosion models. Struct. Infrastruct. Eng. 2018, 14, 843–853. [Google Scholar] [CrossRef]
- Brijder, R.; Helsen, S.; Ompusunggu, A.P. Corrosion Prognostics for Offshore Wind-Turbine Structures using Bayesian Filtering with Bi-modal and Linear Degradation Models. In Proceedings of the 13th International Workshop on Structural Health Monitoring (IWSHM), Stanford, CA, USA, 15–17 March 2022; Farhangdoust, S., Guemes, A., Chang, F.K., Eds.; DEStech Publications, Inc.: Lancaster, PA, USA, 2022; pp. 452–459. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar]
- Pourbaix, M. International cooperation in the prevention of corrosion of materials. In Proceedings of the IX International Congress of Metallic Corrosion, Toronto, ON, Canada, 3–7 June 1990; Volume 1, pp. 57–100. [Google Scholar]
- Kenny, E.D.; Paredes, R.S.; de Lacerda, L.A.; Sica, Y.C.; de Souza, G.P.; Lázaris, J. Artificial neural network corrosion modeling for metals in an equatorial climate. Corros. Sci. 2009, 51, 2266–2278. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.; Kirubarajan, T. Estimation for Kinematic Models. In Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002; Chapter 6; pp. 267–299. [Google Scholar] [CrossRef]
- Melchers, R. Maritime Corrosion—New insights. In Proceedings of the Symposion on Corrosion and Fouling, Warsaw, Poland, 2–7 June 2019; Available online: http://corrosion.hzs.be/abstracts.html#Melchers (accessed on 1 April 2021).
- Saxena, A.; Celaya, J.; Saha, B.; Saha, S.; Goebel, K. Metrics for Offline Evaluation of Prognostic Performance. Int. J. Progn. Health Manag. 2010, 1, 1. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prognosis Algorithm | Mean Accuracy |
|---|---|
| Linear | 0.400 |
| Power law | 0.415 |
| Bimodal | 0.376 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brijder, R.; Helsen, S.; Ompusunggu, A.P. Switching Kalman Filtering-Based Corrosion Detection and Prognostics for Offshore Wind-Turbine Structures. Wind 2023, 3, 1-13. https://doi.org/10.3390/wind3010001
Brijder R, Helsen S, Ompusunggu AP. Switching Kalman Filtering-Based Corrosion Detection and Prognostics for Offshore Wind-Turbine Structures. Wind. 2023; 3(1):1-13. https://doi.org/10.3390/wind3010001
Chicago/Turabian StyleBrijder, Robert, Stijn Helsen, and Agusmian Partogi Ompusunggu. 2023. "Switching Kalman Filtering-Based Corrosion Detection and Prognostics for Offshore Wind-Turbine Structures" Wind 3, no. 1: 1-13. https://doi.org/10.3390/wind3010001