
Effects of Inflow Parameters and Disk Thickness on an Actuator Disk inside the Neutral Atmospheric Boundary Layer


Abstract
:1. Introduction
2. Methodology
2.1. Governing Equations
2.2. Actuator Disk Model
2.3. Validation Data
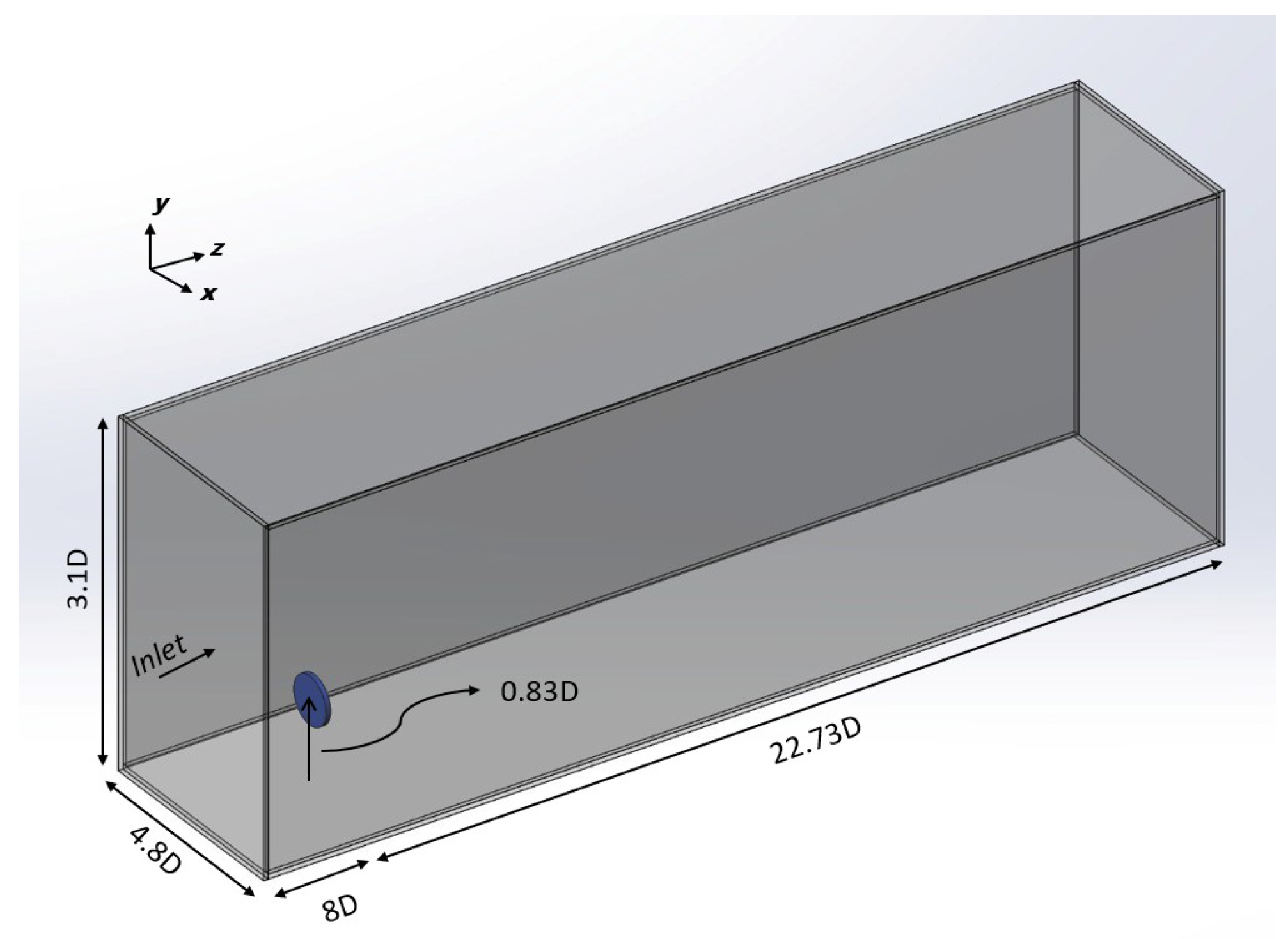
2.4. Computational Settings
2.4.1. Inflow Conditions
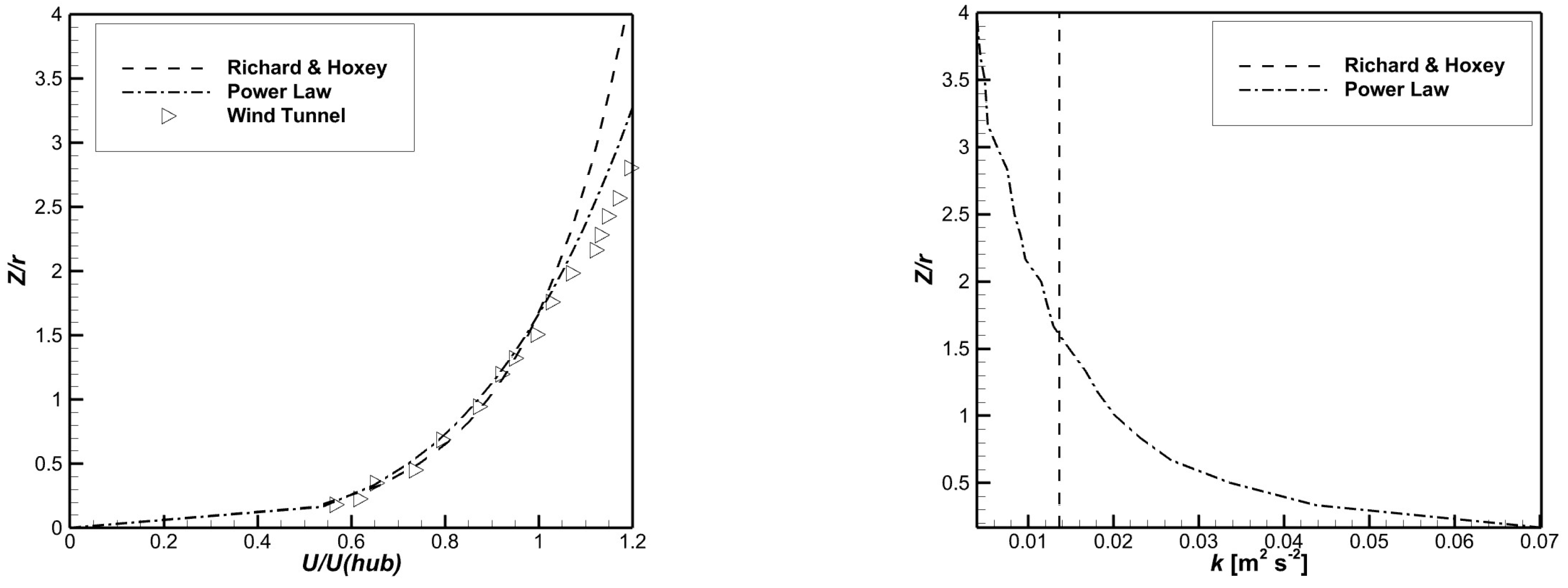
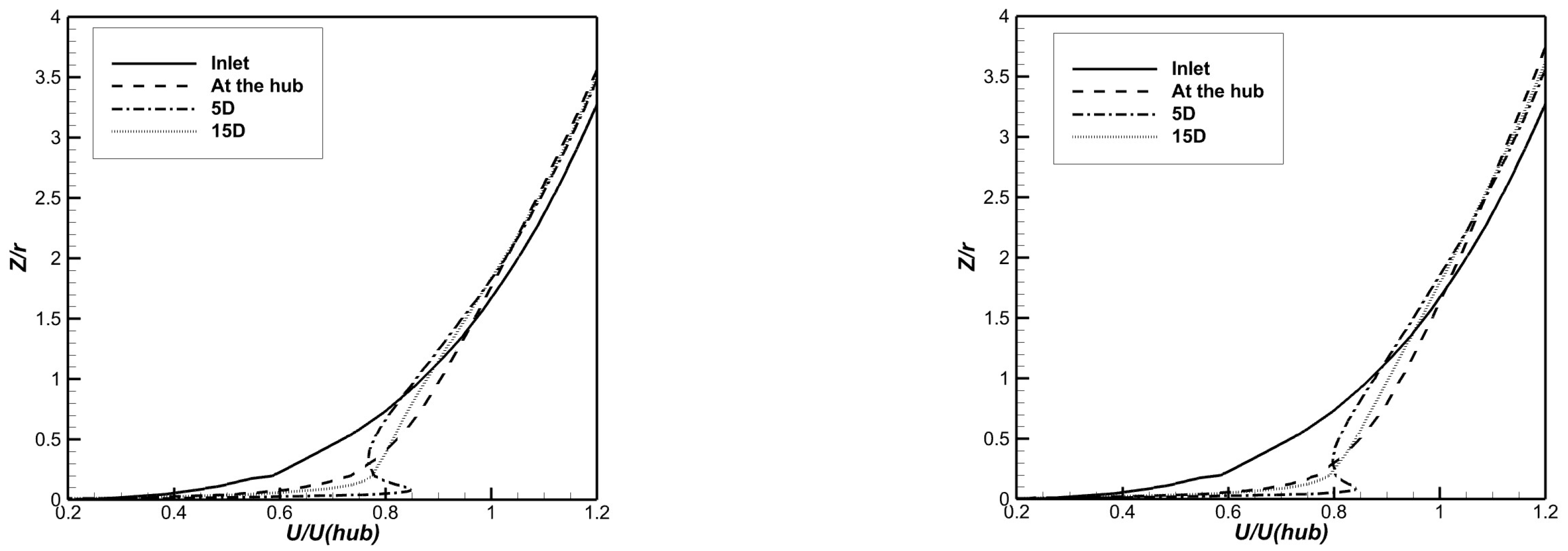
2.4.2. Horizontal Homogeneity
3. Results and Discussion
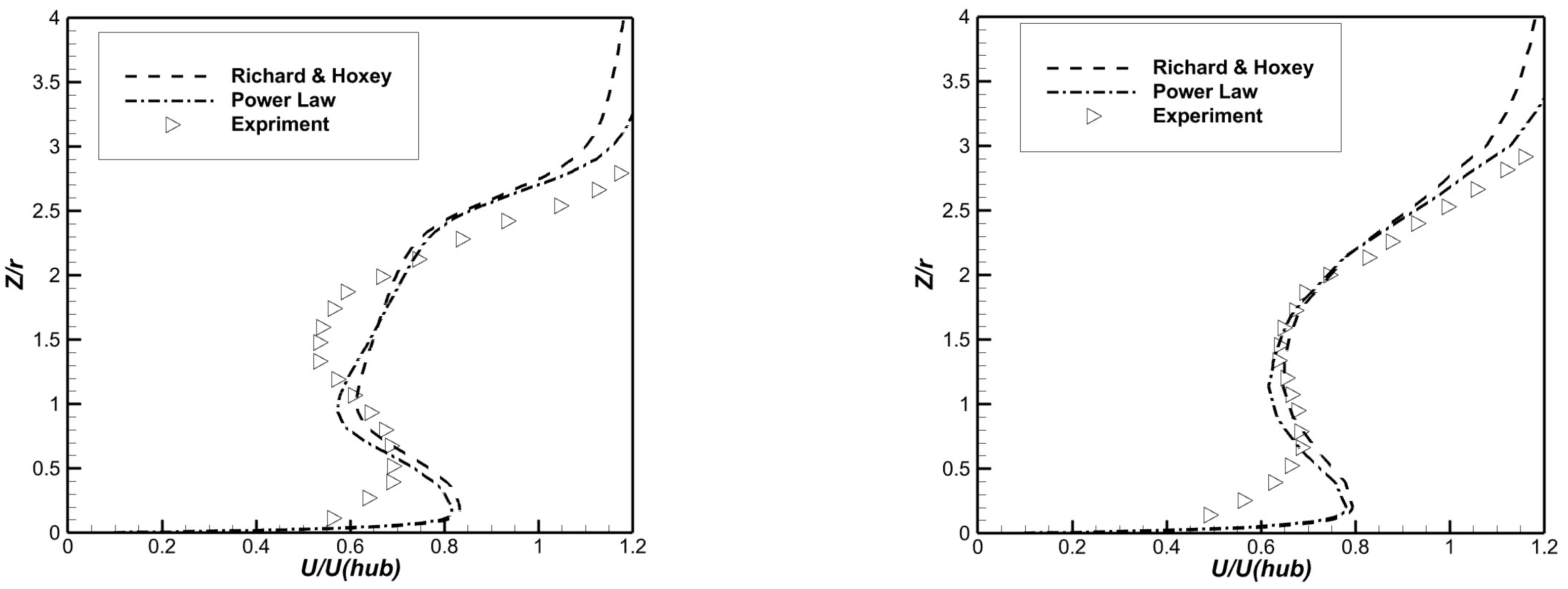
3.1. A Study of Inflow Parameters
3.2. Actuator Disk Thickness
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AD | Actuator Disk |
| DRM | Direct Rotor Modelling |
| IRM | Indirect Rotor Modelling |
| BEM | Blade Element Momentum |
| AL | Actuator Line |
| AS | Actuator Surface |
| LES | Large Eddy Simulation |
| RANS | Reynolds Averaged Navier-Stokes |
| R & H | Richard & Hoxey |
| TI | Turbulence Intensity |
| Thrust Coefficient | |
| Turbine Thrust | |
| Friction Velocity | |
| Aerodynamic Surface Roughness Lengths | |
| Terrain Roughness Coefficient | |
| Boundary Layer Friction Velocity | |
| Non-dimensionalized distance from the actuator disk center | |
| Thickness Ratio | |
| Mesh size | |
| GSCR | Global Scaled Continuity Residuals |
| Continuity Residual | |
| Continuity Residual At The Current Iteration |
References
- IRENA. Future of Wind: Deployment, Investment, Technology, Grid Integration and Socio-Economic Aspects; Report; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2019. [Google Scholar]
- Froude, R.E. On the Part Played in Propulsion by Difference in Pressure. Trans. Inst. Nav. Archit. 1889, 30, 390–423. [Google Scholar]
- Sumner, J.; España, G.; Masson, C.; Aubrun, S. Evaluation of RANS/actuator disk modelling of wind turbine wake flow using wind tunnel measurements. Int. J. Eng. Syst. Model. Simul. 2013, 5, 147–158. [Google Scholar] [CrossRef]
- Antonini, E.; Romero, D.; Amon, C. Improving CFD wind farm simulations incorporating wind direction uncertainty. Renew. Energy 2018, 133, 1011–1023. [Google Scholar] [CrossRef]
- Glauert, H. Airplane Propellers. In Aerodynamic Theory: A General Review of Progress under a Grant of the Guggenheim Fund for the Promotion of Aeronautics; Durand, W.F., Ed.; Springer: Berlin/Heidelberg, Germany, 1935; pp. 169–360. [Google Scholar] [CrossRef]
- Lin, M.; Porté-Agel, F. Large-Eddy Simulation of Yawed Wind-Turbine Wakes: Comparisons with Wind Tunnel Measurements and Analytical Wake Models. Energies 2019, 12, 4574. [Google Scholar] [CrossRef] [Green Version]
- Lavaroni, L.; Watson, S.; Cook, M.; Dubal, M. A comparison of actuator disc and BEM models in CFD simulations for the prediction of offshore wake losses. J. Phys. Conf. Ser. 2014, 524, 012148. [Google Scholar] [CrossRef]
- Sorrensen, J.N.; Shen, W.Z. Numerical Modeling of Wind Turbine Wakes. J. Fluids Eng. 2002, 124, 393–399. [Google Scholar] [CrossRef]
- Troldborg, N. Actuator Line Modeling of Wind Turbine Wakes. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2009. [Google Scholar]
- Richards, P.J.; Norris, S.E. Appropriate boundary conditions for computational wind engineering models revisited. J. Wind Eng. Ind. Aerodyn. 2011, 99, 257–266. [Google Scholar] [CrossRef]
- Richards, P.J.; Hoxey, R.P. Appropriate boundary conditions for computational wind engineering models using the k-ϵ turbulence model. J. Wind Eng. Ind. Aerodyn. 1993, 46–47, 145–153. [Google Scholar] [CrossRef]
- Japan, A.I.O. Guidebook for CFD Predictions of Urban Wind Environment; Architectural Institute of Japan: Tokyo, Japan, 2007. [Google Scholar]
- Mattar, S.J.; Kavian Nezhad, M.R.; Versteege, M.; Lange, C.F.; Fleck, B.A. Validation Process for Rooftop Wind Regime CFD Model in Complex Urban Environment Using an Experimental Measurement Campaign. Energies 2021, 14, 2497. [Google Scholar] [CrossRef]
- Kavian Nezhad, M.R.; Lange, C.F.; Fleck, B.A. Performance Evaluation of the RANS Models in Predicting the Pollutant Concentration Field within a Compact Urban Setting: Effects of the Source Location and Turbulent Schmidt Number. Atmosphere 2022, 13, 1013. [Google Scholar] [CrossRef]
- Santo, G.; Peeters, M.; Van Paepegem, W.; Degroote, J. Effect of rotor–tower interaction, tilt angle, and yaw misalignment on the aeroelasticity of a large horizontal axis wind turbine with composite blades. Wind Energy 2020, 23, 1578–1595. [Google Scholar] [CrossRef]
- Syed Ahmed Kabir, I.F.; Ng, E. Effect of different atmospheric boundary layers on the wake characteristics of NREL Phase VI Wind Turbine. Renew. Energy 2018, 130, 1185–1197. [Google Scholar] [CrossRef]
- Cabezón, D.; Migoya, E.; Crespo, A. Comparison of turbulence models for the computational fluid dynamics simulation of wind turbine wakes in the atmospheric boundary layer. Wind Energy 2011, 14, 909–921. [Google Scholar] [CrossRef] [Green Version]
- Pichandi, C.; Pitchandi, P.; Kumar, S.; Sudharsan, N.M. Improving the performance of a combined horizontal and vertical axis wind turbine for a specific terrain using CFD. Mater. Today Proc. 2022, 62, 1089–1097. [Google Scholar] [CrossRef]
- Tian, W.; Zheng, K.; Hu, H. Investigation of the wake propagation behind wind turbines over hilly terrain with different slope gradients. J. Wind Eng. Ind. Aerodyn. 2021, 215, 104683. [Google Scholar] [CrossRef]
- Song, Y.L.; Tian, L.L.; Zhao, N. Numerical simulation and model prediction of complex wind-turbine wakes. J. Chin. Inst. Eng. 2021, 44, 627–636. [Google Scholar] [CrossRef]
- Ichenial, M.M.; Elhajjaji, A. A study of the wind turbine wake dynamics in the neutral boundary layer using large eddy simulation. Procedia Manuf. 2019, 32, 775–785. [Google Scholar] [CrossRef]
- Naderi, S.; Parvanehmasiha, S.; Torabi, F. Modeling of horizontal axis wind turbine wakes in Horns Rev offshore wind farm using an improved actuator disc model coupled with computational fluid dynamic. Energy Convers. Manag. 2018, 171, 953–968. [Google Scholar] [CrossRef]
- Sedaghatizadeh, N.; Kelso, R.; Cazzolato, B.; Ghayesh, M.; Arjomandi, M. The effect of the boundary layer on the wake of a horizontal axis wind turbine. Energy 2019, 182, 1202–1221. [Google Scholar] [CrossRef]
- Tian, L.; Song, Y.; Zhao, N.; Shen, W.; Zhu, C.; Wang, T. Effects of turbulence modelling in AD/RANS simulations of single wind and tidal turbine wakes and double wake interactions. Energy 2020, 208, 118440. [Google Scholar] [CrossRef]
- Uchida, T.; Taniyama, Y.; Fukatani, Y.; Nakano, M.; Bai, Z.; Yoshida, T.; Inui, M. A New Wind Turbine CFD Modeling Method Based on a Porous Disk Approach for Practical Wind Farm Design. Energies 2020, 13, 3197. Available online: https://www.mdpi.com/1996-1073/13/12/3197 (accessed on 1 November 2022). [CrossRef]
- Boni Cruz, L.E.; Carmo, B. Wind farm layout optimization based on CFD simulations. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 433. [Google Scholar] [CrossRef]
- Chiang, Y.C.; Hsu, Y.C.; Chau, S.W. Power Prediction of Wind Farms via a Simplified Actuator Disk Model. J. Mar. Sci. Eng. 2020, 8, 610. [Google Scholar] [CrossRef]
- Hamlaoui, M.N.; Smaili, A.; Dobrev, I.; Pereira, M.; Fellouah, H.; Khelladi, S. Numerical and experimental investigations of HAWT near wake predictions using Particle Image Velocimetry and Actuator Disk Method. Energy 2022, 238, 121660. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Micallef, D. Wake interactions of two tandem floating offshore wind turbines: CFD analysis using actuator disc model. Renew. Energy 2021, 179, 859–876. [Google Scholar] [CrossRef]
- Richmond, M.; Antoniadis, A.; Wang, L.; Kolios, A.; Al-Sanad, S.; Parol, J. Evaluation of an offshore wind farm computational fluid dynamics model against operational site data. Ocean. Eng. 2019, 193, 106579. [Google Scholar] [CrossRef]
- Tian, L.; Song, Y.; Zhao, N.; Shen, W.; Wang, T. AD/RANS Simulations of Wind Turbine Wake Flow Employing the RSM Turbulence Model: Impact of Isotropic and Anisotropic Inflow Conditions. Energies 2019, 12, 4026. [Google Scholar] [CrossRef] [Green Version]
- Creech, A.; Früh, W.G.; Maguire, A.E. Simulations of an Offshore Wind Farm Using Large-Eddy Simulation and a Torque-Controlled Actuator Disc Model. Surv. Geophys. 2015, 36, 427–481. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.T.; Porté-Agel, F. Modeling turbine wakes and power losses within a wind farm using LES: An application to the Horns Rev offshore wind farm. Renew. Energy 2015, 75, 945–955. [Google Scholar] [CrossRef]
- Moens, M.; Duponcheel, M.; Winckelmans, G.; Chatelain, P. LES of wind farm response to transient scenarios using a high fidelity actuator disk model. J. Phys. Conf. Ser. 2016, 753, 032053. [Google Scholar] [CrossRef]
- Behrouzifar, A.; Darbandi, M. An improved actuator disc model for the numerical prediction of the far-wake region of a horizontal axis wind turbine and its performance. Energy Convers. Manag. 2019, 185, 482–495. [Google Scholar] [CrossRef]
- Simisiroglou, N.; Karatsioris, M.; Nilsson, K.; Breton, S.; Ivanell, S. The Actuator Disc Concept in Phoenics. Energy Procedia 2016, 94, 269–277. [Google Scholar] [CrossRef]
- Chamorro, L.; Porté-Agel, F. A Wind-Tunnel Investigation of Wind-Turbine Wakes: Boundary-Layer Turbulence Effects. Bound.-Layer Meteorol. 2008, 132, 129–149. [Google Scholar] [CrossRef] [Green Version]
- Stevens, R.; Martínez-Tossas, L.; Meneveau, C. Comparison of wind farm large eddy simulations using actuator disk and actuator line models with wind tunnel experiments Turbulence Effects. Renew. Energy 2018, 116, 470–478. [Google Scholar] [CrossRef]
- Chamorro, L.; Porté-Agel, F. Effects of Thermal Stability and Incoming Boundary-Layer Flow Characteristics on Wind-Turbine Wakes: A Wind-Tunnel Study. Bound.-Layer Meteorol. 2010, 136, 515–533. [Google Scholar] [CrossRef] [Green Version]
- Uchida, T. Design Wind Speed Evaluation Technique in Wind Turbine Installation Point by Using the Meteorological and CFD Models. J. Flow Control. Meas. Vis. 2018, 6, 168–184. [Google Scholar] [CrossRef] [Green Version]
- Blocken, B.; Stathopoulos, T.; Carmeliet, J. CFD simulation of the atmospheric boundary layer: Wall function problems. Atmos. Environ. 2007, 41, 238–252. [Google Scholar] [CrossRef]
- Bouras, I.; Ma, L.; Ingham, D.; Pourkashanian, M. An improved k-ω turbulence model for the simulations of the wind turbine wakes in a neutral atmospheric boundary layer flow. J. Wind Eng. Ind. Aerodyn. 2018, 179, 358–368. [Google Scholar] [CrossRef] [Green Version]
- Gargallo-Peiró, A.; Avila, M.; Owen, H.; Prieto-Godino, L.; Folc, A. Mesh generation, sizing and convergence for onshore and offshore wind farm Atmospheric Boundary Layer flow simulation with actuator discs. J. Comput. Phys. 2018, 375, 209–227. [Google Scholar] [CrossRef]
- Ansys, Inc. Ansys Fluent User’s Guide; Ansys, Inc.: Canonsburg, PA, USA, 2022; p. 5864. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Method | Inflow Condition |
|---|---|---|
| Santo et al. [15] | Direct rotor Modelling | Richard & Hoxey |
| Fazil et al. [16] | Direct rotor Modelling | Richard & Hoxey |
| Cabezón et al. [17] | Actuator Disk | Richard & Hoxey |
| Pichandi et al. [18] | Actuator Disk | Richard & Hoxey |
| Tian et al. [19] | Actuator Disk—BEM | Richard & Hoxey |
| Song et al. [20] | Actuator Disk | Richard & Hoxey |
| Ichenial et al. [21] | Direct rotor Modelling | Richard & Hoxey |
| Naderi et al. [22] | Actuator Disk—BEM | Richard & Hoxey |
| Sedaghatizadeh. [23] | Direct rotor Modelling | Power Law |
| Tian et al. [24] | Actuator Disk | Power Law |
| Uchida et al. [25] | Direct rotor Modelling | Power Law |
| Surface Type | ||
|---|---|---|
| Rough | 1.2 mm | 0.16 m/s |
| Smooth | 0.05 mm | 0.11 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
RahnamayBahambary, K.; Fleck, B.A. Effects of Inflow Parameters and Disk Thickness on an Actuator Disk inside the Neutral Atmospheric Boundary Layer. Wind 2022, 2, 733-746. https://doi.org/10.3390/wind2040038
RahnamayBahambary K, Fleck BA. Effects of Inflow Parameters and Disk Thickness on an Actuator Disk inside the Neutral Atmospheric Boundary Layer. Wind. 2022; 2(4):733-746. https://doi.org/10.3390/wind2040038
Chicago/Turabian StyleRahnamayBahambary, Khashayar, and Brian A. Fleck. 2022. "Effects of Inflow Parameters and Disk Thickness on an Actuator Disk inside the Neutral Atmospheric Boundary Layer" Wind 2, no. 4: 733-746. https://doi.org/10.3390/wind2040038