
Controllability of a Class of Heterogeneous Networked Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (i)
- .
- (ii)
- if A and B are invertible.
- (iii)
- .
- (iv)
- .
- (v)
- if and only if or .
3. Model Formulation
4. Controllability Results in a General Network Topology
- (i)
- The eigenspectrum of F is the union of eigenspectrum of , where, . That is,
- (ii)
- If J is a diagonal matrix, then are the left eigenvectors of F corresponding to the eigenvalue .
- (iii)
- If J contains a Jordan block of order for some eigenvalue of C with for all , then are the left eigenvectors of F corresponding to the eigenvalue .
- (i)
- for all
- (ii)
- For a fixed i, each left eigenvector ξ of , for some with ,
- (iii)
- If matrices have a common eigenvalue σ, then are linearly independent vectors, where is the geometric multiplicity of σ for and are the left eigenvectors of corresponding to .
- (i)
- as , for all .
- (ii)
- for , the only left eigenvector is . We have and .For the matrix the left eigenvectors are, respectively, and . We have and .For the matrix , the left eigenvectors are, respectively,and . We have and .
- (iii)
- as the matrices and do not have any common eigenvalues, third condition of Theorem 2 is satisfied.
- (i)
- as , for all .
- (ii)
- for , the only left eigenvector is . We have and .For , the left eigenvectors are and . We have and .and for the matrix , the left eigenvectors are and . We have and .
- (iii)
- as the matrices and do not have any common eigenvalues, third condition of Theorem 2 is satisfied.
- (i)
- for all ;
- (ii)
- For a fixed i, is controllable for some with ;
- (iii)
- If matrices have a common eigenvalue σ, then are linearly independent vectors, where is the geometric multiplicity of σ for and are the left eigenvectors of corresponding to .
- (i)
- as , for all .
- (ii)
- We have . Here and are controllable.
- (iii)
- Here, and has a common eigenvalue, . The corresponding left eigenvectors are, respectively, and . Clearly, and .
- (i)
- for all ;
- (ii)
- is controllable, for ;
- (iii)
- If matrices have a common eigenvalue σ, thenare linearly independent vectors, where is the geometric multiplicity of σ for and are the left eigenvectors of corresponding to .
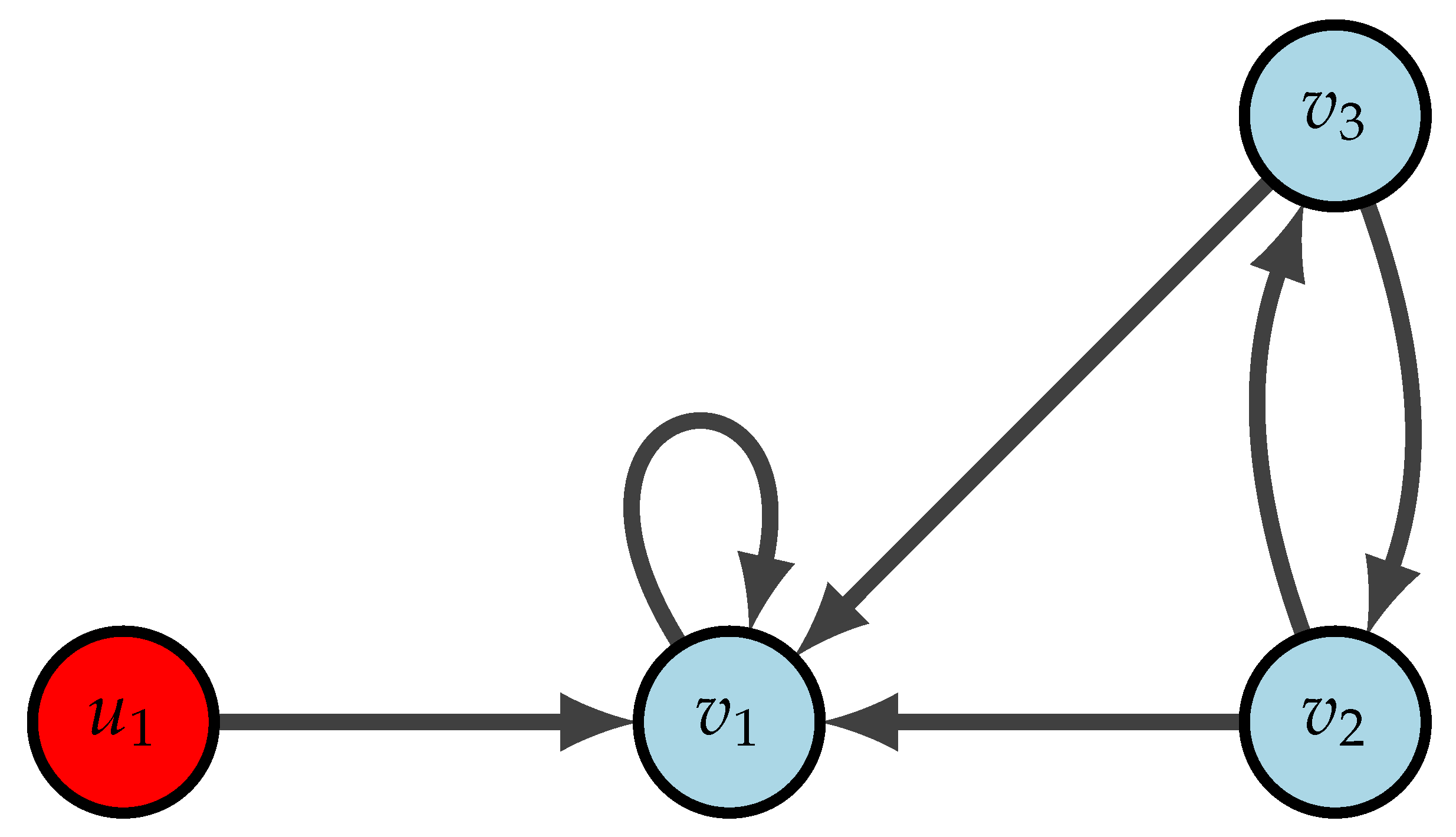
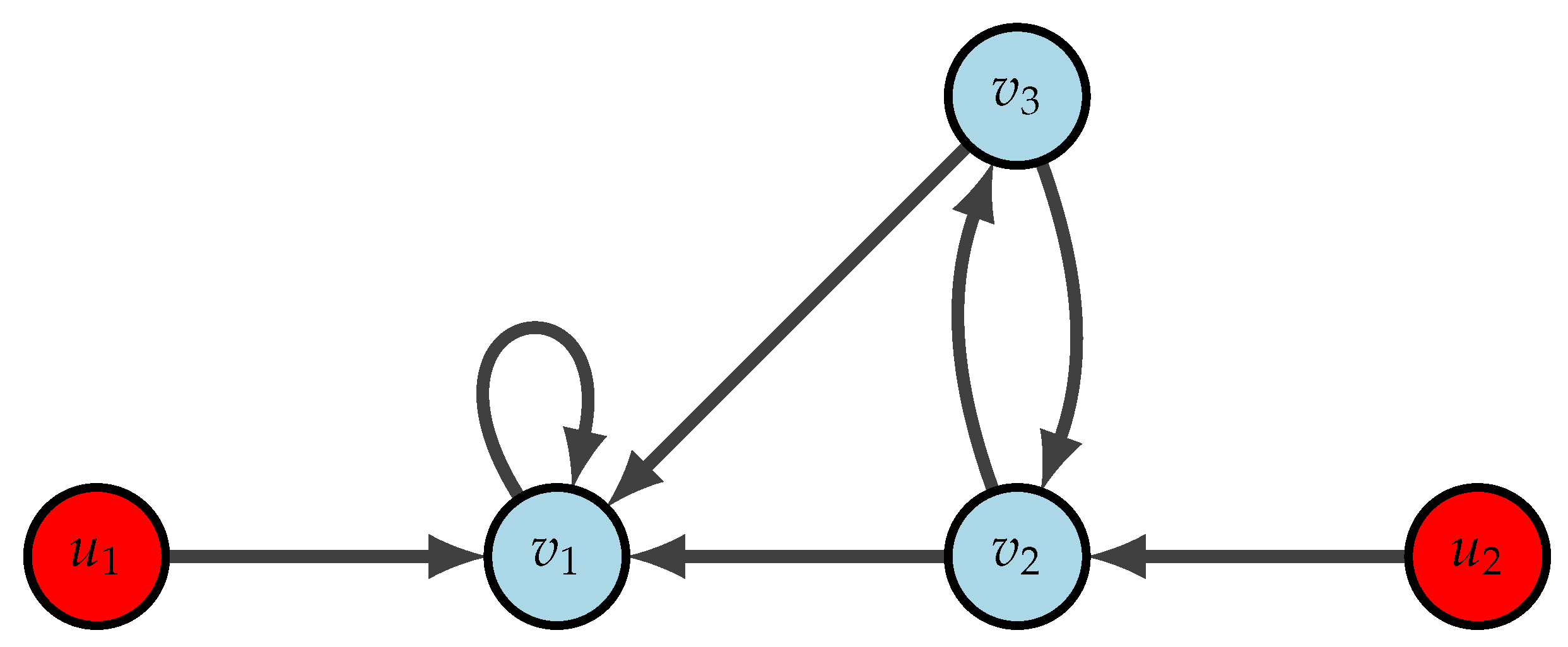
Controllability Results in a Special Network Topology
- (i)
- Every node have external control input.
- (ii)
- is controllable for all .
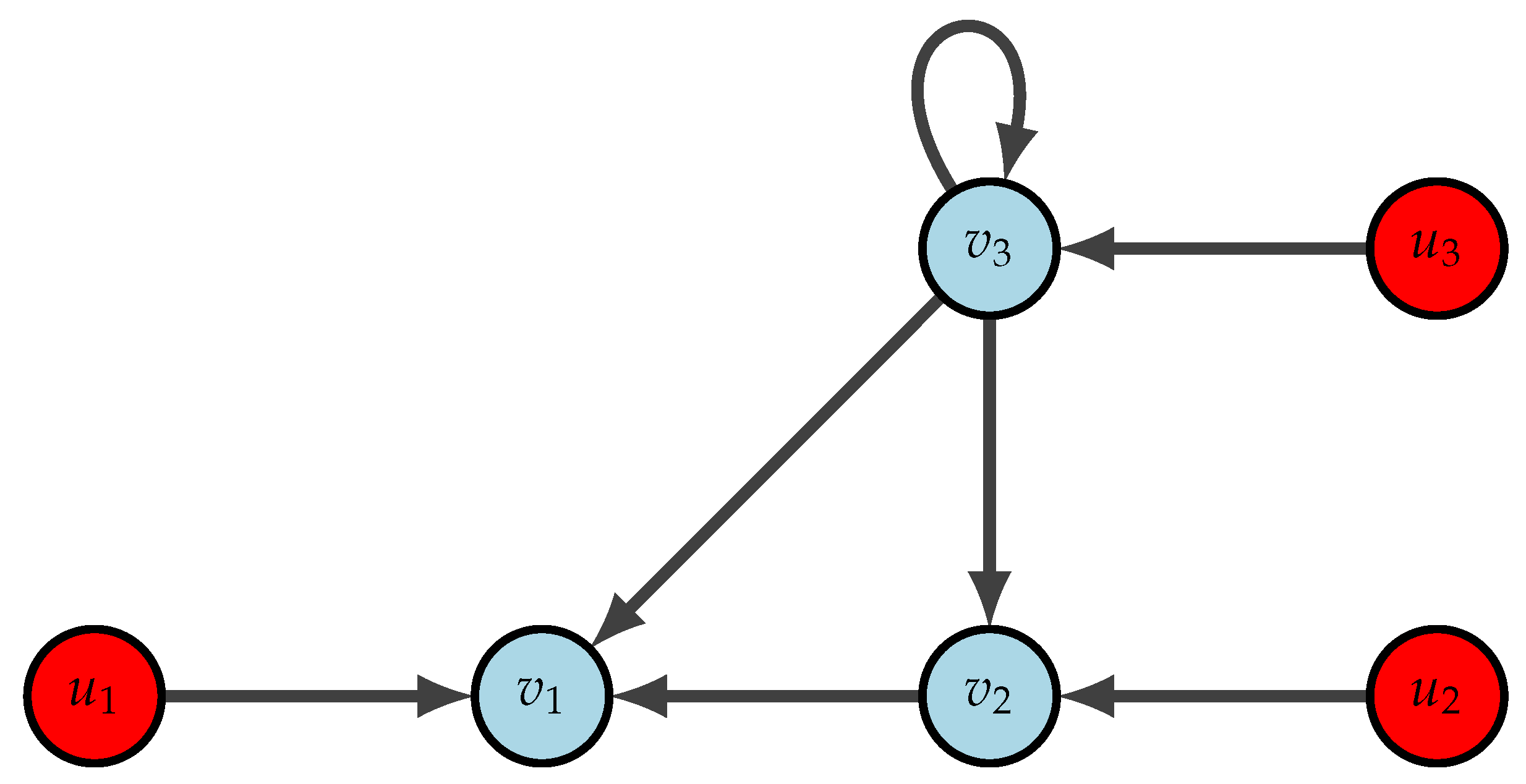
- (i)
- From Figure 4, it is clear that all the nodes have external control input.
- (ii)
- and are controllable.
5. Conclusions and Future Scope of Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LTI | Linear Time-Invariant |
| MIMO | Multi Input Multi Output |
References
- Strogatz, S.H. Exploring complex networks. Nature 2001, 410, 268–276. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.F.; Chen, G. Complex networks: Small-world, scale-free and beyond. IEEE Circuits Syst. Mag. 2003, 3, 6–20. [Google Scholar] [CrossRef] [Green Version]
- Xiang, L.; Chen, F.; Ren, W.; Chen, G. Advances in network controllability. IEEE Circuits Syst. Mag. 2019, 19, 8–32. [Google Scholar] [CrossRef]
- Kalman, R.E. On the general theory of control systems. IRE Trans. Autom. Control 1959, 4, 110. [Google Scholar] [CrossRef]
- Lin, C.T. Structural controllability. IEEE Trans. Autom. Control 1974, 19, 201–208. [Google Scholar]
- Hautus, M.L. Controllability and observability conditions of linear autonomous systems. Ned. Akad. Wet. 1969, 72, 443–448. [Google Scholar]
- Glover, K.; Silverman, L. Characterization of structural controllability. IEEE Trans. Autom. Control 1976, 21, 534–537. [Google Scholar] [CrossRef]
- Mayeda, H. On structural controllability theorem. IEEE Trans. Autom. Control 1981, 26, 795–798. [Google Scholar] [CrossRef]
- Tarokh, M. Measures for controllability, observability and fixed modes. IEEE Trans. Autom. Control 1992, 37, 1268–1273. [Google Scholar] [CrossRef]
- Tanner, H.G. On the controllability of nearest neighbor interconnections. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 3, pp. 2467–2472. [Google Scholar]
- Rahmani, A.; Mesbahi, M. Pulling the strings on agreement: Anchoring, controllability, and graph automorphisms. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–11 July 2007; pp. 2738–2743. [Google Scholar]
- Liu, X.; Lin, H.; Chen, B.M. Graph-theoretic characterisations of structural controllability for multi-agent system with switching topology. Int. J. Control 2013, 86, 222–231. [Google Scholar] [CrossRef]
- Yazıcıoğlu, A.Y.; Abbas, W.; Egerstedt, M. Graph distances and controllability of networks. IEEE Trans. Autom. Control 2016, 61, 4125–4130. [Google Scholar] [CrossRef] [Green Version]
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2009, 8, 18–28. [Google Scholar] [CrossRef]
- Wuchty, S. Controllability in protein interaction networks. Proc. Natl. Acad. Sci. USA 2014, 111, 7156–7160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, S.; Pasqualetti, F.; Cieslak, M.; Telesford, Q.K.; Alfred, B.Y.; Kahn, A.E.; Medaglia, J.D.; Vettel, J.M.; Miller, M.B.; Grafton, S.T.; et al. Controllability of structural brain networks. IEEE Nat. Commun. 2015, 6, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Bassett, D.S.; Sporns, O. Network neuroscience. Nat. Neurosci. 2017, 20, 353–364. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T. On the controllability and observability of networked dynamic systems. Automatica 2015, 52, 63–75. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Chen, G.; Wang, X.; Tang, W.K. Controllability of networked MIMO systems. Automatica 2016, 69, 405–409. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Wang, X.; Chen, G. Controllability of networked higher-dimensional systems with one-dimensional communication. In Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences; Royal Society: London, UK, 2017; Volume 375, p. 20160215. [Google Scholar]
- Hao, Y.; Duan, Z.; Chen, G. Further on the controllability of networked MIMO LTI systems. Int. J. Robust Nonlinear Control 2018, 28, 1778–1788. [Google Scholar] [CrossRef]
- Wang, P.; Xiang, L.; Chen, F. Controllability of heterogeneous networked MIMO systems. In Proceedings of the 2017 International Workshop on Complex Systems and Networks (IWCSN), Doha, Qatar, 8–10 December 2017; pp. 45–49. [Google Scholar]
- Xiang, L.; Wang, P.; Chen, F.; Chen, G. Controllability of directed networked MIMO systems with heterogeneous dynamics. IEEE Trans. Control Netw. Syst. 2019, 7, 807–817. [Google Scholar] [CrossRef]
- Ajayakumar, A.; George, R.K. A Note on Controllability of Directed Networked System with Heterogeneous Dynamics. IEEE Trans. Control Netw. Syst. 2022, 2022, 1–4. [Google Scholar] [CrossRef]
- Kong, Z.; Cao, L.; Wang, L.; Guo, G. Controllability of Heterogeneous Networked Systems with Non-identical Inner-coupling Matrices. IEEE Trans. Control Netw. Syst. 2022, 9, 867–878. [Google Scholar] [CrossRef]
- Ajayakumar, A.; George, R.K. Controllability of networked systems with heterogeneous dynamics. Math. Control Signals Syst. 2023, 1–20. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Topics in Matrix Analysis; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Rugh, W.J. Linear System Theory; Prentice-Hall, Inc.: Kalamazoo, MI, USA, 1996. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ajayakumar, A.; George, R.K. Controllability of a Class of Heterogeneous Networked Systems. Foundations 2023, 3, 167-180. https://doi.org/10.3390/foundations3020015
Ajayakumar A, George RK. Controllability of a Class of Heterogeneous Networked Systems. Foundations. 2023; 3(2):167-180. https://doi.org/10.3390/foundations3020015
Chicago/Turabian StyleAjayakumar, Abhijith, and Raju K. George. 2023. "Controllability of a Class of Heterogeneous Networked Systems" Foundations 3, no. 2: 167-180. https://doi.org/10.3390/foundations3020015