
Development and Usability of a Prototype Upper Extremities Lever-Driven Exercise System

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
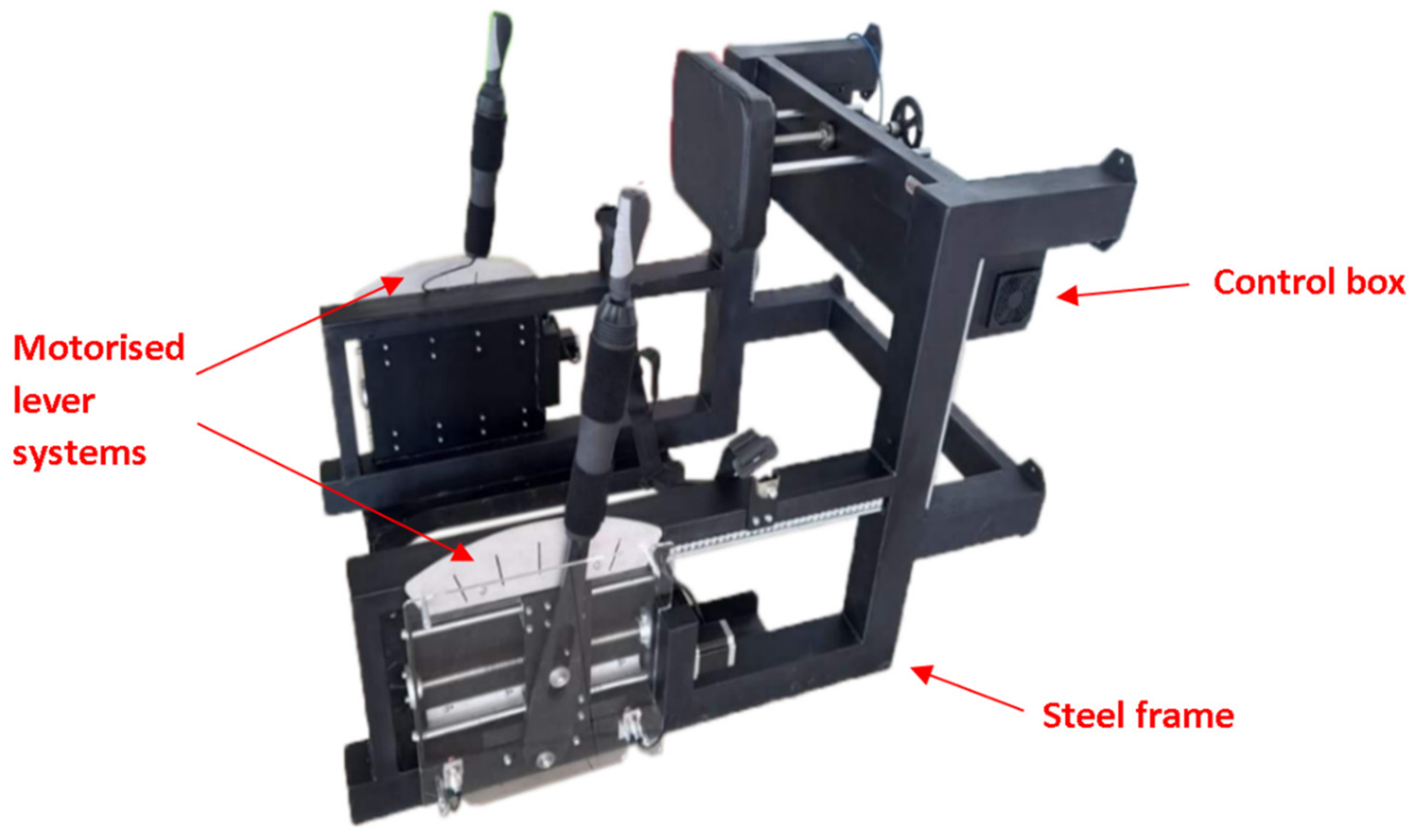
2.1. Device Overview
2.2. Technical Description of the Device Main Components
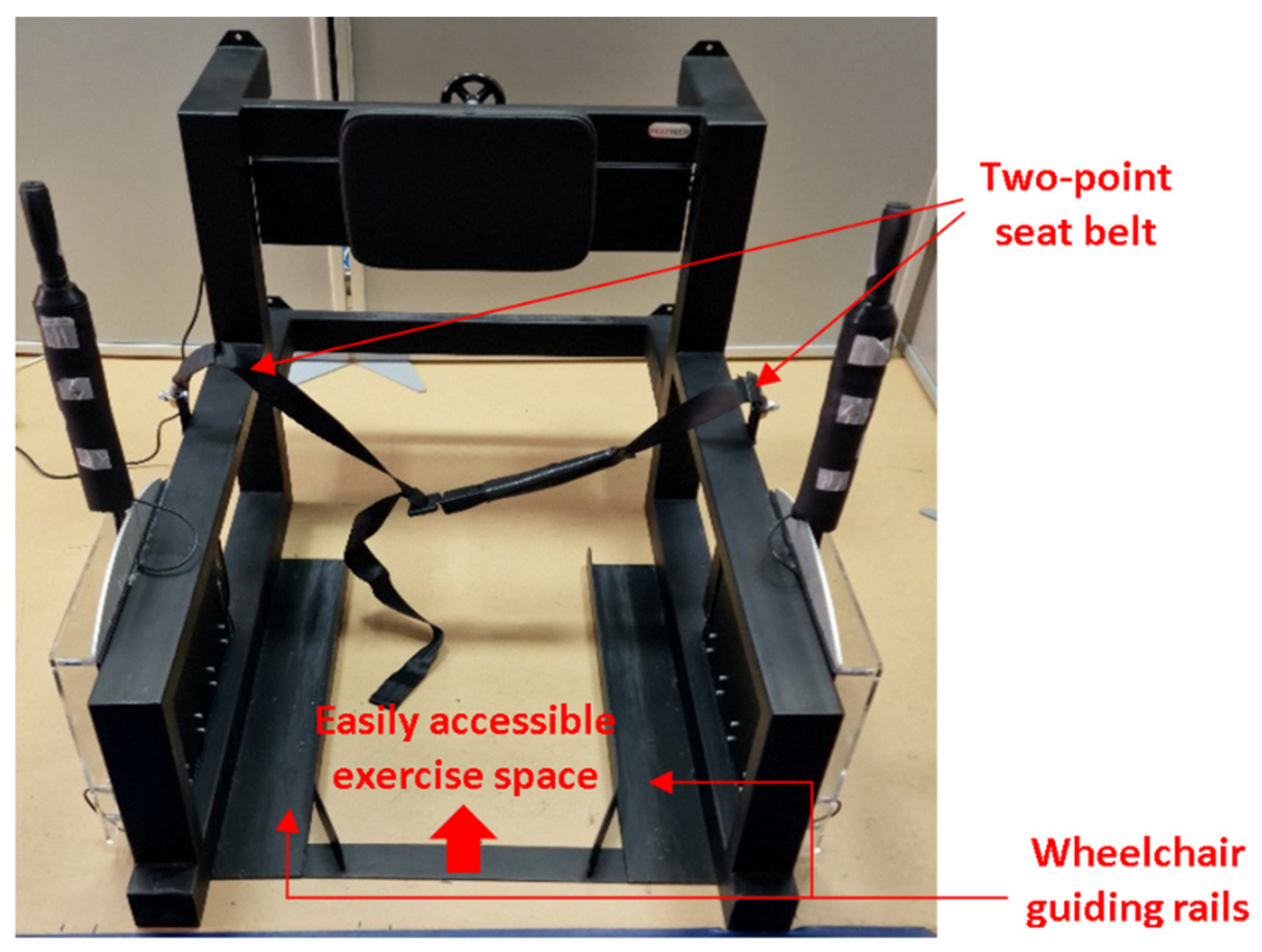
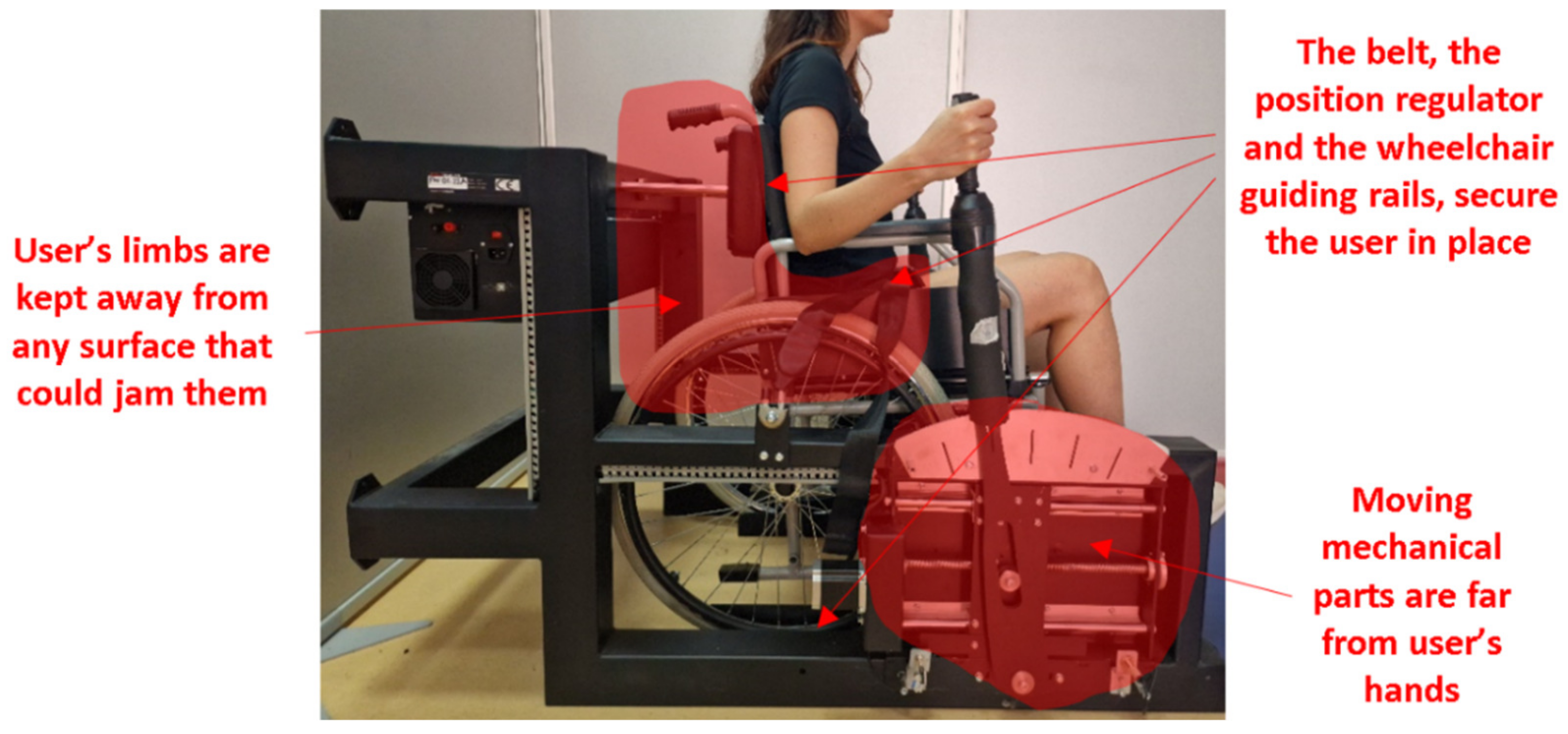
2.2.1. Technical Description of the Steel Frame
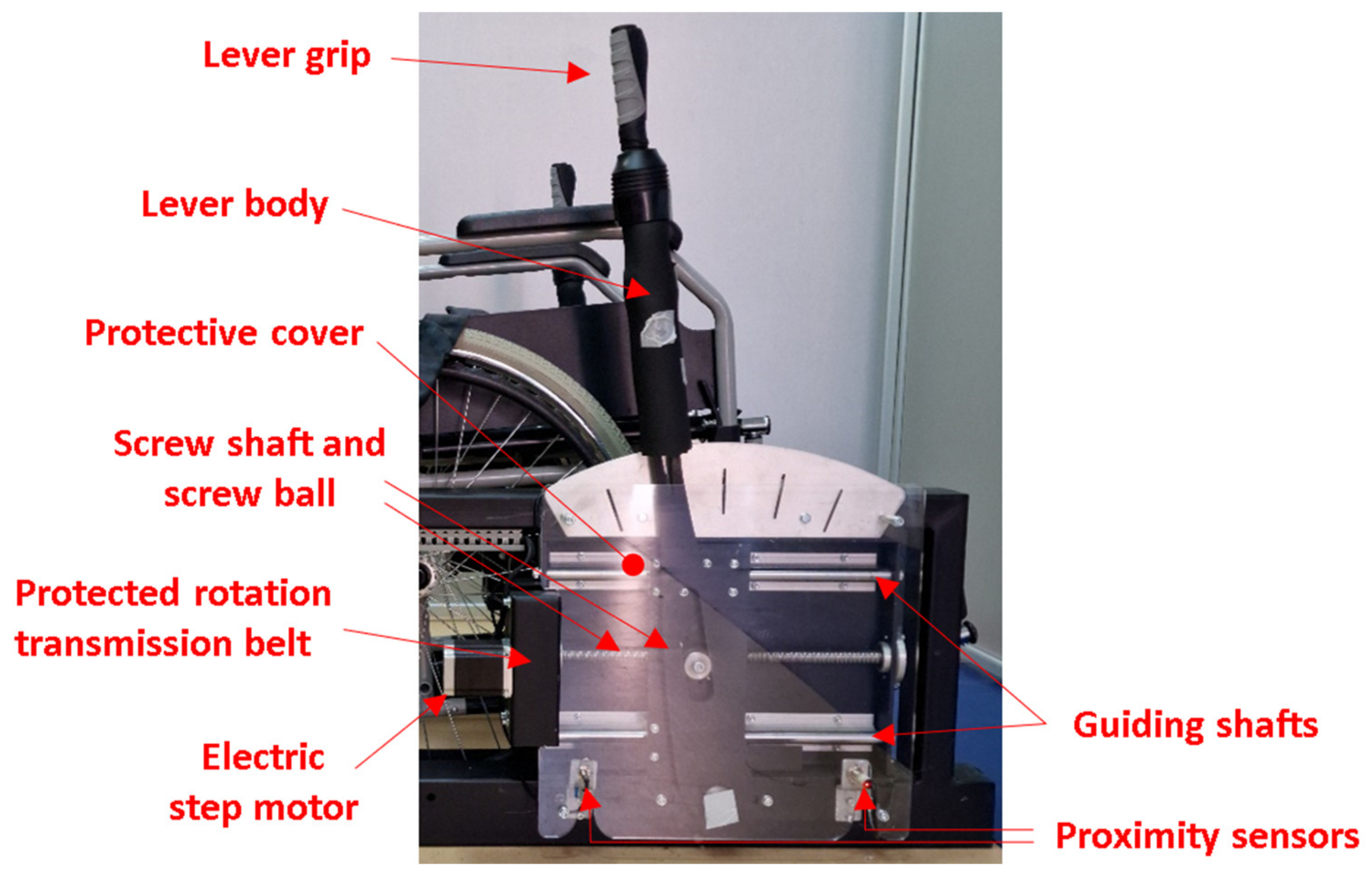
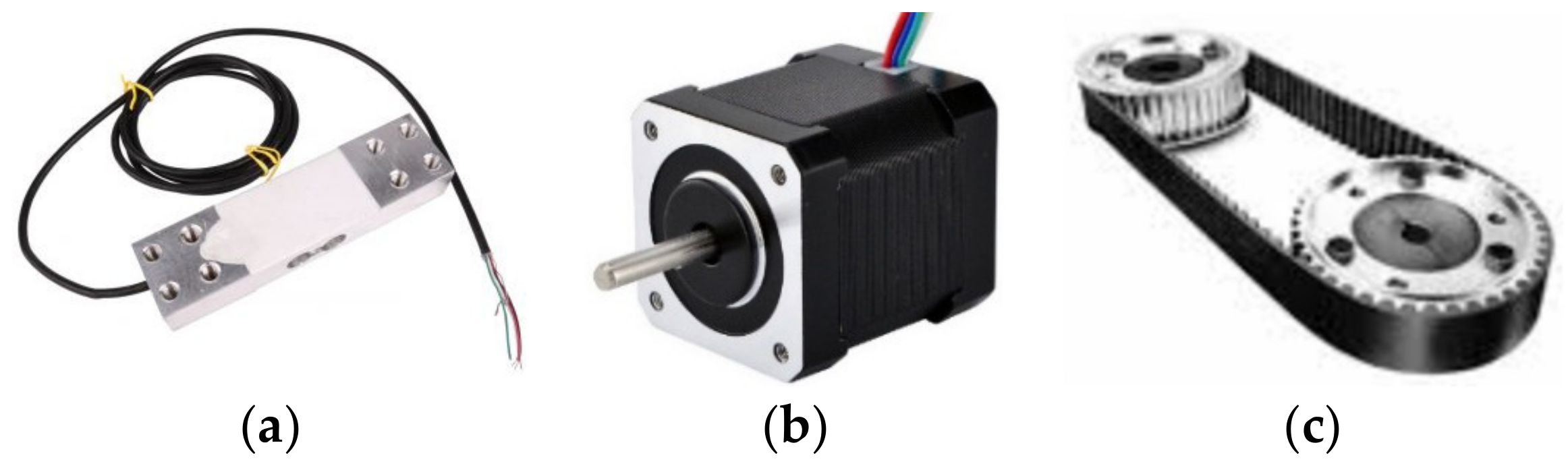
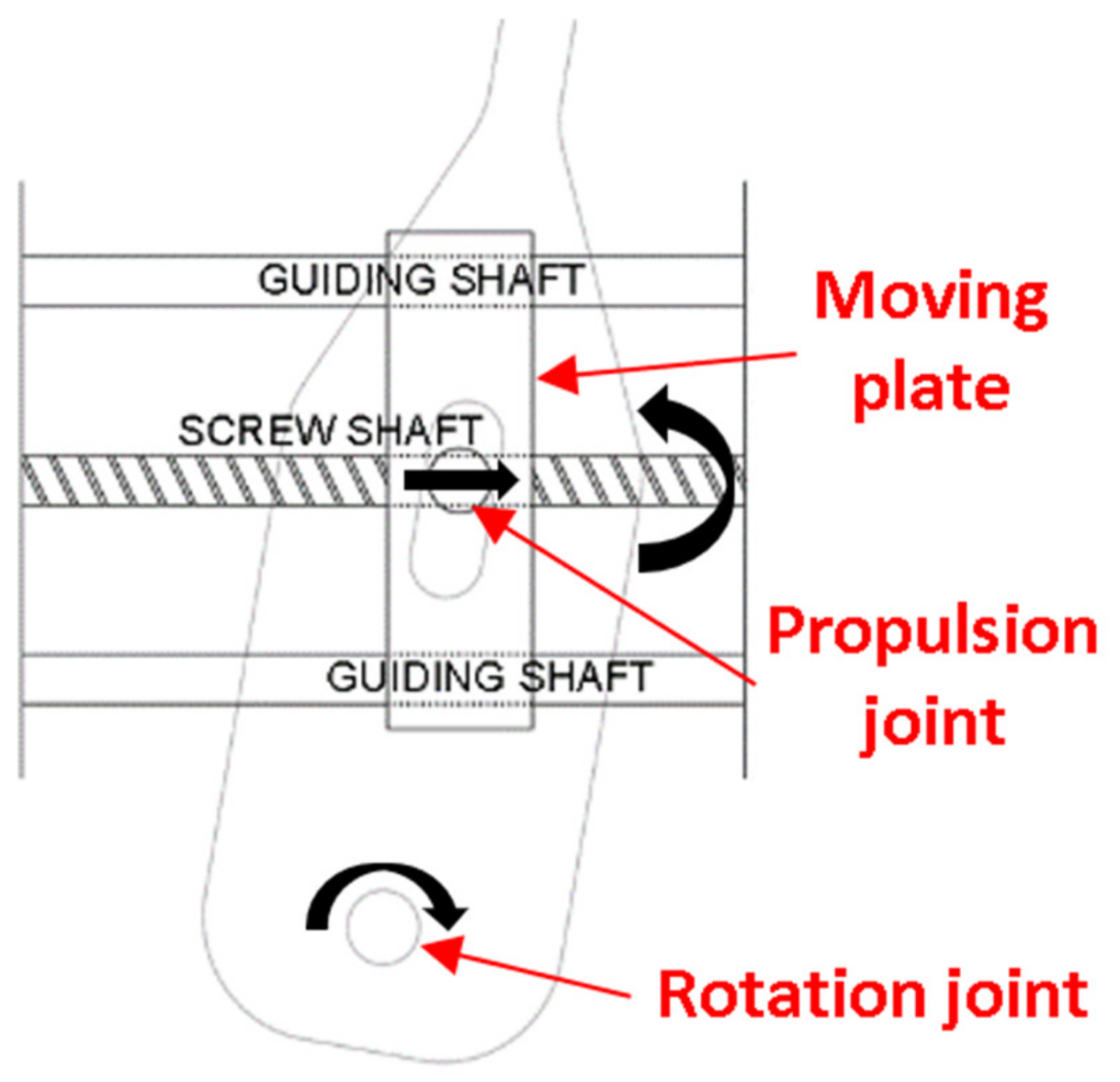
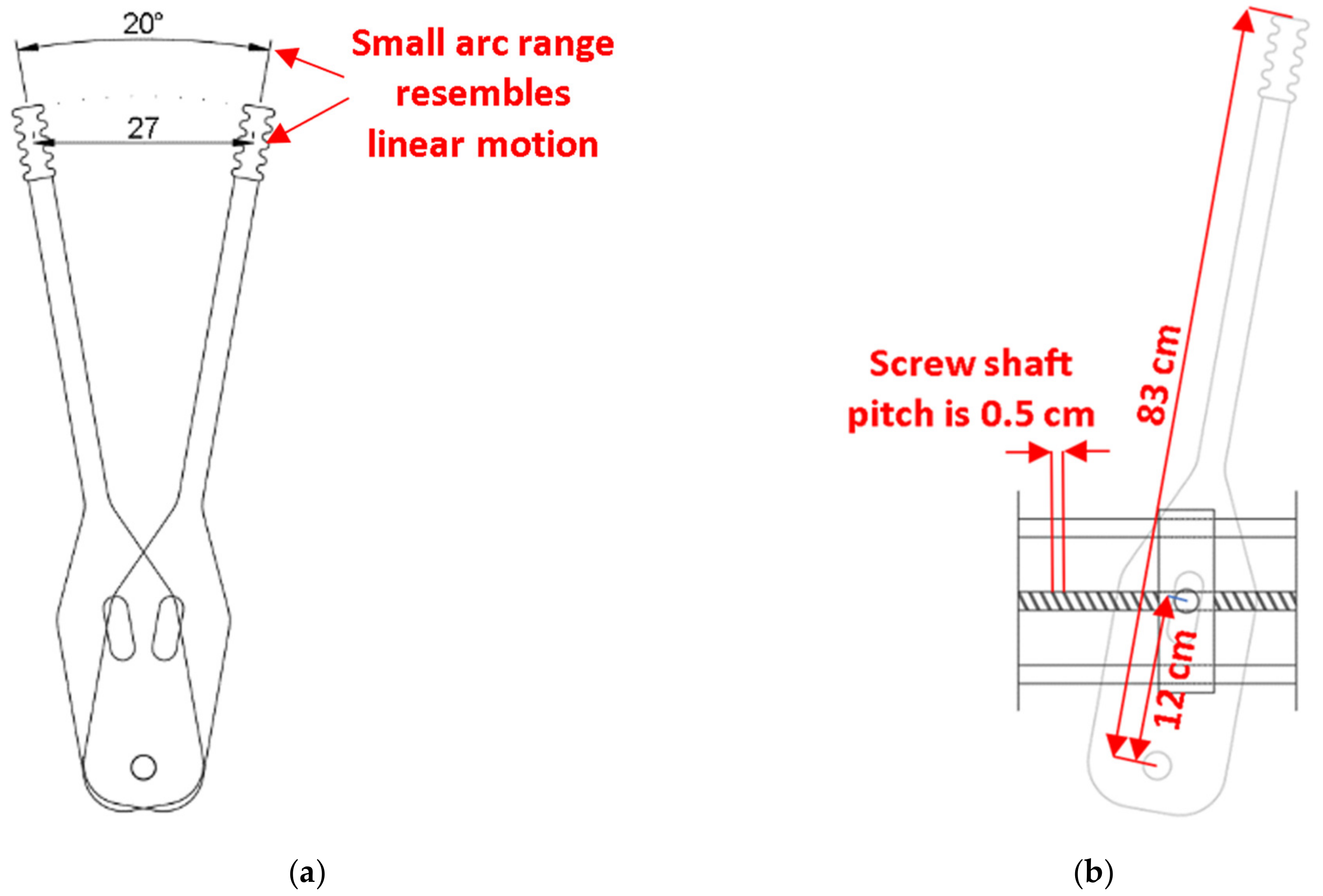
2.2.2. General Description of the Motorised Lever System
2.2.3. Technical Description of the Control Box
- Analog to digital signal acquisition from the embedded loadcells on the lever grips;
- Motion command outputs for the step motors of the lever systems;
- USB interconnectivity for real time data input and output;
- Proximity sensors signal acquisition and lever positioning calibration process coordination.
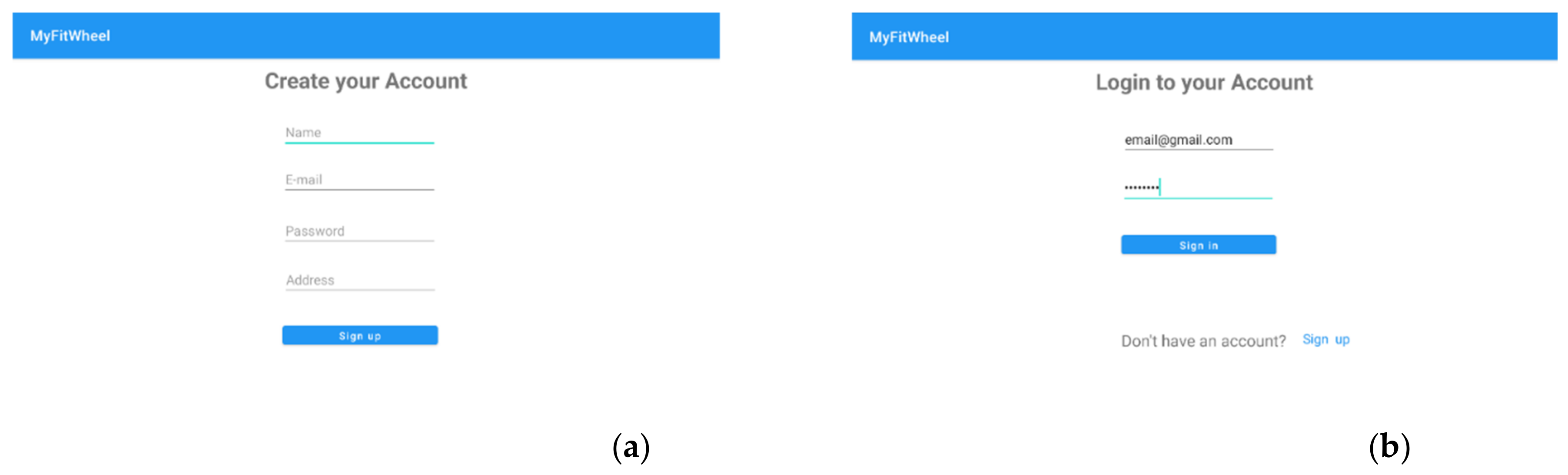
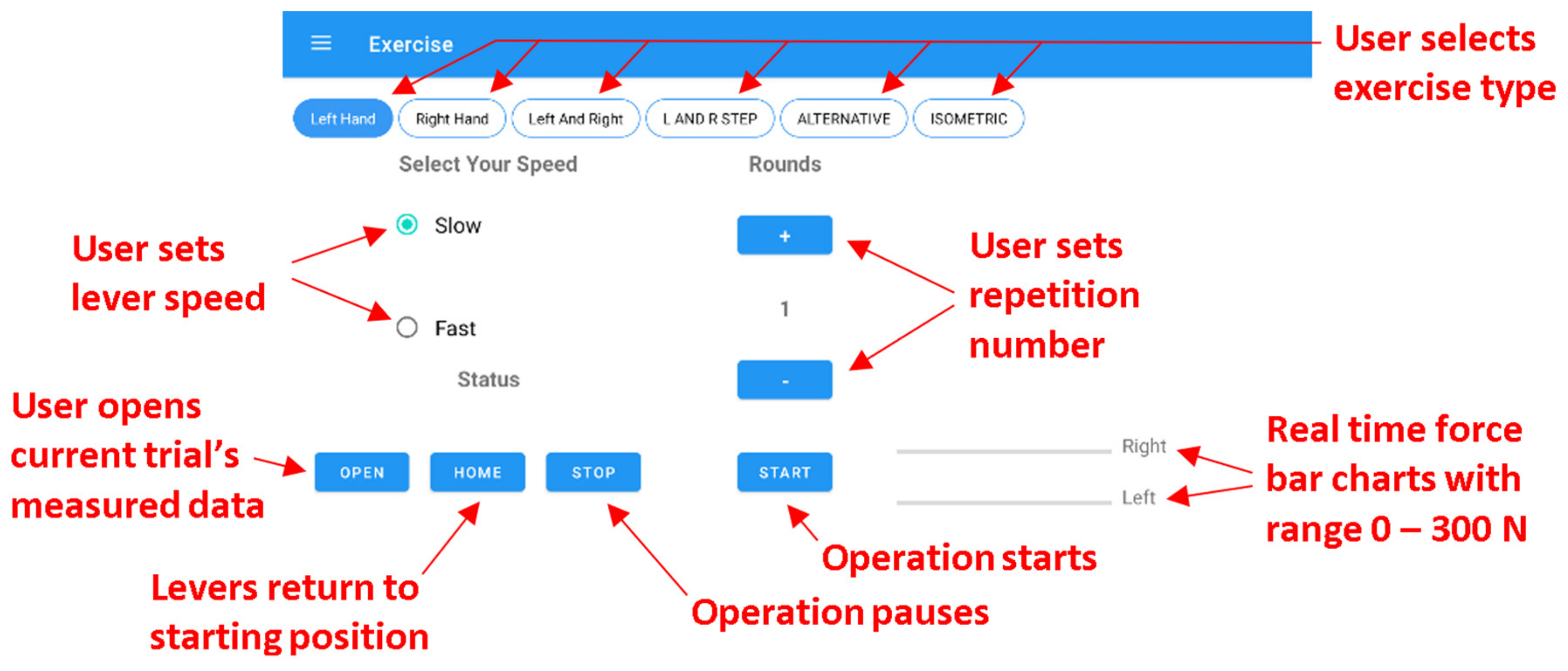
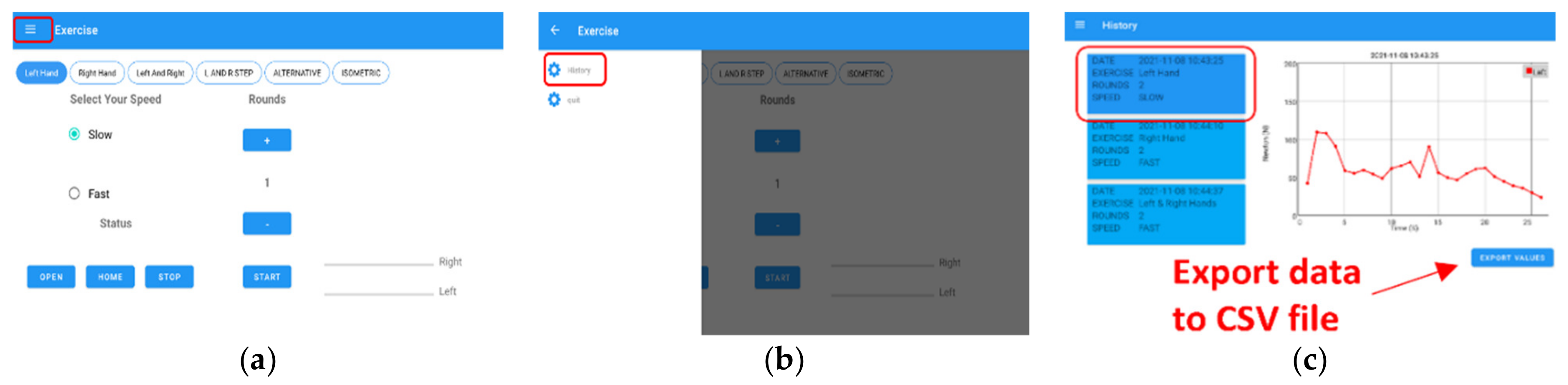
2.2.4. FIT-WHEEL Supporting Software Description
2.3. Experimental Testing
2.3.1. Participants
2.3.2. Experimental Protocol
2.3.3. Instruments
- Attitudes. Six items were employed to evaluate attitudes towards exercise with the FIT-WHEEL system based on Ajzen’s [26,27] recommendations and previous studies in new technology systems [28]. Participants’ responses were given on a 7-point Likert scale from 1 (“I find concentric or eccentric exercise with the FIT-WHEEL system … very bad or very useless or very unpleasant”) to 7 (“I find concentric or eccentric exercise with the FIT-WHEEL system … very good or very useful or very pleasant”);
- Intention. Three items were used to capture participants’ intention to use the FIT-WHEEL system based on Ajzen’s [26,27] guidelines and previous research [28] (e.g., “I intend to use the FIT-WHEEL system for exercise” or “If I gain access, I intent to use the FIT-WHEEL system for exercise”). All answers were given on a 7-point Likert scale from 1 (Very Unlikely) to 7 (Very Likely);
- Enjoyment. Four items of the Intrinsic Motivation Inventory’s enjoyment subscale [29] were used to assess participants’ enjoyment while exercising concentrically or eccentrically with the FIT-WHEEL system (e.g., “I enjoyed concentric or eccentric exercise with the FIT-WHEEL system very much” or “Exercising concentrically or eccentrically with the FIT-WHEEL system was fun”). The participants responded on a 5-point Likert scale from 1 (Strongly Disagree) to 5 (Strongly Agree);
- Usability. A short and modified version of Brooke’s usability scale [30] was used to assess the FIT-WHEEL system’s usability during the concentric and eccentric exercise protocols. Totally, seven items were delivered to capture participants’ perceived usability of the FIT-WHEEL system (e.g., “I thought that the FIT-WHEEL system was easy to use” or “I found the FIT-WHEEL system very complex”), while their responses were given on a 5-point Likert scale ranging from 1 (Strongly Disagree) to 5 (Strongly Agree). Participants’ responses in three items with a negative meaning (e.g., “I found the FIT-WHEEL system very complex”) were revised.
2.3.4. Statistical Analyses
3. Results
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- The transmission ratio of the transmission belt is 1:1;
- Each power lever system is set to operate in two different speeds, where the “fast” and the “slow” speed respectively correspond to 200 RPM and 100 RPM for the motor shaft.

References
- Selph, S.S.; Skelly, A.C.; Wasson, N.; Dettori, J.R.; Brodt, E.D.; Ensrud, E.; Elliot, D.; Dissinger, K.M.; McDonagh, M. Physical Activity and the Health of Wheelchair Users: A Systematic Review in Multiple Sclerosis, Cerebral Palsy, and Spinal Cord Injury. Arch. Phys. Med. Rehabil. 2021, 102, 2464–2481.e2433. [Google Scholar] [CrossRef] [PubMed]
- Smith, E.M.; Sakakibara, B.M.; Miller, W.C. A review of factors influencing participation in social and community activities for wheelchair users. Disabil. Rehabil. Assistive Technol. 2016, 11, 361–374. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valent, L.; Dallmeijer, A.; Houdijk, H.; Talsma, E.; van der Woude, L. The effects of upper body exercise on the physical capacity of people with a spinal cord injury: A systematic review. Clin. Rehabil. 2007, 21, 315–330. [Google Scholar] [CrossRef] [PubMed]
- Miller, L.E.; Herbert, W.G. Health and economic benefits of physical activity for patients with spinal cord injury. Clin. Outcomes Res. 2016, 8, 551–558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Koppenhagen, C.F.; Post, M.; De Groot, S.; Van Leeuwen, C.; Van Asbeck, F.; Stolwijk-Swüste, J.; Van Der Woude, L.; Lindeman, E. Longitudinal relationship between wheelchair exercise capacity and life satisfaction in patients with spinal cord injury: A cohort study in the Netherlands. J. Spinal Cord Med. 2014, 37, 328–337. [Google Scholar] [CrossRef] [Green Version]
- Martin Ginis, K.A.; Latimer, A.E.; Arbour-Nicitopoulos, K.P.; Buchholz, A.C.; Bray, S.R.; Craven, B.C.; Hayes, K.C.; Hicks, A.L.; McColl, M.A.; Potter, P.J.; et al. Leisure Time Physical Activity in a Population-Based Sample of People With Spinal Cord Injury Part I: Demographic and Injury-Related Correlates. Arch. Phys. Med. Rehabil. 2010, 91, 722–728. [Google Scholar] [CrossRef]
- Roberton, T.; Bucks, R.S.; Skinner, T.C.; Allison, G.T.; Dunlop, S.A. Barriers to Physical Activity in Individuals with Spinal Cord Injury: A Western Australian Study. Aust. J. Rehabil. Couns. 2011, 17, 74–88. [Google Scholar] [CrossRef]
- Scelza, W.M.; Kalpakjian, C.Z.; Zemper, E.D.; Tate, D.G. Perceived barriers to exercise in people with spinal cord injury. Am. J. Phys. Med. Rehabil. 2005, 84, 576–583. [Google Scholar] [CrossRef]
- Lee, S.Y.; Lee, J.A.; Chung, H.J.; Kim, H.J.; Kim, Y.C.; Kim, H. Subjective Perception of Individuals with Physical Disabilities Regarding Exercise Equipment Use. Inquiry (United States) 2021, 58, 00469580211010429. [Google Scholar] [CrossRef]
- Sawatzky, B.; Herrington, B.; Choi, K.; Ben Mortenson, W.; Borisoff, J.; Sparrey, C.; Laskin, J.J. Acute physiological comparison of sub-maximal exercise on a novel adapted rowing machine and arm crank ergometry in people with a spinal cord injury. Spinal Cord 2022, 60, 694–700. [Google Scholar] [CrossRef]
- Wong, R.N.; Stewart, A.L.; Sawatzky, B.; Laskin, J.J.; Borisoff, J.; Mattie, J.; Sparrey, C.J.; Mortenson, W.B. Exploring exercise participation and the usability of the adaptive rower and arm crank ergometer through wheelchair users’ perspectives. Disabil. Rehabil. 2021, 44, 3915–3924. [Google Scholar] [CrossRef]
- Flemmer, C.L.; Flemmer, R.C. A review of manual wheelchairs. Disabil. Rehabil. Assistive Technol. 2016, 11, 177–187. [Google Scholar] [CrossRef]
- Pelletier, C.A.; Ditor, D.S.; Latimer-Cheung, A.E.; Warburton, D.E.; Hicks, A.L. Exercise equipment preferences among adults with spinal cord injury. Spinal Cord 2014, 52, 874–879. [Google Scholar] [CrossRef] [Green Version]
- Bjerkefors, A.; Tinmark, F.; Nilsson, J.; Arndt, A. Seated double-poling ergometer performance of individuals with spinal cord injury—A new ergometer concept for standardized upper body exercise. Int. J. Sports Med. 2013, 34, 176–182. [Google Scholar] [CrossRef]
- Ye, G.; Grabke, E.P.; Pakosh, M.; Furlan, J.C.; Masani, K. Clinical Benefits and System Design of FES-Rowing Exercise for Rehabilitation of Individuals with Spinal Cord Injury: A Systematic Review. Arch. Phys. Med. Rehabil. 2021, 102, 1595–1605. [Google Scholar] [CrossRef]
- Elmer, S.J.; Marshall, C.S.; McGinnis, K.R.; Van Haitsma, T.A.; Lastayo, P.C. Eccentric arm cycling: Physiological characteristics and potential applications with healthy populations. Eur. J. Appl. Physiol. 2013, 113, 2541–2552. [Google Scholar] [CrossRef]
- Elmer, S.J.; Danvind, J.; Holmberg, H.C. Development of a novel eccentric arm cycle ergometer for training the upper body. Med. Sci. Sports Exerc. 2013, 45, 206–211. [Google Scholar] [CrossRef]
- Elmer, S.J.; Anderson, D.J.; Wakeham, T.R.; Kilgas, M.A.; Durocher, J.J.; Lindstedt, S.L.; LaStayo, P.C. Chronic eccentric arm cycling improves maximum upper-body strength and power. Eur. J. Appl. Physiol. 2017, 117, 1473–1483. [Google Scholar] [CrossRef]
- Lytle, L.L.; Dannenbring, J.L.; Kilgas, M.A.; Elmer, S.J. Eccentric Arm Cycling: A Potential Exercise for Wheelchair Users. Arch. Phys. Med. Rehabil. 2019, 100, 914–922. [Google Scholar] [CrossRef]
- Hoppeler, H. Moderate load eccentric exercise; A distinct novel training modality. Front. Physiol. 2016, 7, 483. [Google Scholar] [CrossRef]
- LaStayo, P.; Marcus, R.; Dibble, L.; Frajacomo, F.; Lindstedt, S. Eccentric exercise in rehabilitation: Safety feasibility, and application. J. Appl. Physiol. 2014, 116, 1426–1434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liampas, A.; Neophytou, P.; Sokratous, M.; Varrassi, G.; Ioannou, C.; Hadjigeorgiou, G.M.; Zis, P. Musculoskeletal Pain Due to Wheelchair Use: A Systematic Review and Meta-Analysis. Pain Ther. 2021, 10, 973–984. [Google Scholar] [CrossRef] [PubMed]
- Skendraoui, N.; Bogard, F.; Murer, S.; Ahram, T.Z.; Fiok, K.; Taiar, R. The musculoskeletal contribution in wheelchair propulsion systems: Numerical analysis. In AHFE International Conference on Ergonomics in Design, 2018; Springer: Cham, Switzerland, 2019; Volume 777, pp. 251–260. [Google Scholar] [CrossRef]
- Tsatalas, T.; Karampina, E.; Mina, M.A.; Patikas, D.A.; Laschou, V.C.; Pappas, A.; Jamurtas, A.Z.; Koutedakis, Y.; Giakas, G. Altered Drop Jump Landing Biomechanics Following Eccentric Exercise-Induced Muscle Damage. Sports 2021, 9, 24. [Google Scholar] [CrossRef] [PubMed]
- Tsatalas, T.; Giakas, G.; Spyropoulos, G.; Sideris, V.; Kotzamanidis, C.; Koutedakis, Y. Walking kinematics and kinetics following eccentric exercise-induced muscle damage. J. Electromyogr. Kinesiology 2013, 23, 1229–1236. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I. Constructing a Theory of Planned Behavior Questionnaire. Available online: https://people.umass.edu/aizen/pdf/tpb.measurement.pdf (accessed on 10 May 2022).
- Ajzen, I. Attitudes, Personality and Behavior, 2nd ed.; Open University Press/McGraw-Hill: Maidenhead, England, 2005. [Google Scholar]
- Rasimah, C.M.Y.; Ahmad, A.; Zaman, H.B. Evaluation of user acceptance of mixed reality technology. Australas. J. Educ. Technol. 2011, 27, 1369–1387. [Google Scholar] [CrossRef]
- McAuley, E.D.; Duncan, T.; Tammen, V.V. Psychometric properties of the intrinsic motivation inventoiy in a competitive sport setting: A confirmatory factor analysis. Res. Q. Exerc. Sport 1989, 60, 48–58. [Google Scholar] [CrossRef]
- Brooke, J. SUS—A quick and dirty usability scale. In Usability Evaluation in Industry; Jordan, P.W., Thomas, B., McClelland, I.L., Weerdmeester, B., Eds.; Taylor & Francis Ltd.: Bristol, UK, 1996; pp. 189–194. [Google Scholar]
- Krommidas, C.; Galanis, E.; Tzormpatzakis, E.; Hasandra, M.; Hatzigeorgiadis, A.; Morres, I.D.; Comoutos, N.; Theodorakis, Y. The Effects of Acute Exercise and Virtual Reality Tasks on Children’s Memory Function and Exercise Preference. Int. J. Kinesiol. Sport. Sci. 2022, 10, 7–17. [Google Scholar] [CrossRef]
- Papacharisis, V.; Goudas, M. Perceptions about exercise and intrinsic motivation of students attending a health-related physical education program. Percept. Mot. Ski. 2003, 97, 689–696. [Google Scholar] [CrossRef]
- Touloudi, E.; Hassandra, M.; Galanis, E.; Goudas, M.; Theodorakis, Y. Applicability of an Immersive Virtual Reality Exercise Training System for Office Workers during Working Hours. Sports 2022, 10, 104. [Google Scholar] [CrossRef]
- Mat Rosly, M.; Mat Rosly, H.; Davis Oam, G.M.; Husain, R.; Hasnan, N. Exergaming for individuals with neurological disability: A systematic review. Disabil. Rehabil. 2017, 39, 727–735. [Google Scholar] [CrossRef]
- Sauro, J.; Lewis, J.R. Quantifying the User Experience: Practical Statistics for User Research; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- Van Der Scheer, J.W.; De Groot, S.; Tepper, M.; Gobets, D.; Veeger, D.H.E.J.; Van Der Woude, L.H.V.; Woldring, F.; Valent, L.; Slootman, H.; Faber, W. Wheelchair-specific fitness of inactive people with long-term spinalcord injury. J. Rehabil. Med. 2015, 47, 330–337. [Google Scholar] [CrossRef] [Green Version]
- Haisma, J.A.; Van Der Woude, L.H.V.; Stam, H.J.; Bergen, M.P.; Sluis, T.A.R.; Bussmann, J.B.J. Physical capacity in wheelchair-dependent persons with a spinal cord injury: A critical review of the literature. Spinal Cord 2006, 44, 642–652. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exercise Protocol | Variables | M ± SD | α | Shapiro-Wilks | p-Value |
|---|---|---|---|---|---|
| Concentric exercise | Attitudes | 6.03 ± 0.82 | 0.90 | 0.829 | 0.023 |
| Intention | 5.00 ± 0.88 | 0.85 | 0.893 | 0.153 | |
| Enjoyment | 4.07 ± 0.36 | 0.55 | 0.955 | 0.707 | |
| Usability | 3.70 ± 0.45 | 0.56 | 0.870 | 0.077 | |
| Eccentric exercise | Attitudes | 5.89 ± 0.57 | 0.79 | 0.845 | 0.037 |
| Intention | 5.18 ± 0.98 | 0.88 | 0.972 | 0.905 | |
| Enjoyment | 3.84 ± 0.49 | 0.74 | 0.793 | 0.008 | |
| Usability | 3.95 ± 0.31 | 0.52 | 0.960 | 0.775 |
| Concentric Exercise Protocol | Eccentric Exercise Protocol | |||||||
|---|---|---|---|---|---|---|---|---|
| Attitudes | Intention | Enjoyment | Usability | Attitudes | Intention | Enjoyment | Usability | |
| N | M ± SD | M ± SD | M ± SD | M ± SD | M ± SD | M ± SD | M ± SD | M ± SD |
| P1 | 6.33 ± 0.52 | 4.00 ± 1.00 | 4.75 ± 0.50 | 4.29 ± 0.53 | 6.17 ± 0.75 | 4.67 ± 0.58 | 4.50 ± 1.00 | 3.71 ± 0.49 |
| P2 | 6.00 ± 1.10 | 6.00 ± 0.00 | 4.00 ± 0.82 | 3.14 ± 0.58 | 6.17 ± 0.75 | 6.33 ± 0.58 | 3.75± 0.50 | 3.43 ± 0.79 |
| P3 | 6.50 ± 0.55 | 5.67 ± 0.58 | 4.50 ± 0.58 | 4.00 ± 0.58 | 6.50 ± 0.55 | 5.67 ± 0.58 | 4.50 ± 0.58 | 4.14 ± 0.38 |
| P4 | 6.17 ± 0.98 | 4.33 ± 0.58 | 4.00 ± 0.82 | 3.14 ± 1.25 | 5.50 ± 1.22 | 3.33 ± 0.58 | 3.25 ± 0.50 | 4.00 ± 0.58 |
| P5 | 6.00 ± 0.00 | 6.33 ± 0.58 | 4.00 ± 0.82 | 3.29 ± 0.69 | 6.00 ± 0.00 | 6.00 ± 0.00 | 4.50 ± 1.00 | 4.14 ± 0.69 |
| P6 | 7.00 ± 0.00 | 5.00 ± 1.00 | 4.25 ± 0.50 | 4.29 ± 0.49 | 6.33 ± 0.52 | 5.00 ± 0.00 | 4.25 ± 0.50 | 4.43 ± 0.53 |
| P7 | 6.67 ± 0.52 | 6.00 ± 0.00 | 3.75 ± 1.26 | 3.71 ± 0.95 | 6.33 ± 0.82 | 6.67 ± 0.58 | 3.50 ± 1.29 | 4.00 ± 0.58 |
| P8 | 6.17 ± 0.75 | 5.00 ± 0.00 | 4.00 ± 0.82 | 4.00 ± 0.38 | 5.67 ± 0.52 | 5.00 ± 0.00 | 3.50 ± 0.58 | 4.00 ± 0.58 |
| P9 | 6.33 ± 0.52 | 4.00 ± 1.00 | 4.25 ± 1.50 | 3.86 ± 0.69 | 6.17 ± 0.41 | 4.00 ± 1.00 | 3.50 ± 1.00 | 3.71 ± 0.49 |
| P10 | 4.00 ± 0.89 | 4.67 ± 0.58 | 3.75 ± 0.50 | 3.14 ± 1.13 | 4.50 ± 1.05 | 5.33 ± 0.58 | 3.50 ± 0.58 | 4.29 ± 0.49 |
| P11 | 5.17 ± 0.75 | 4.00 ± 1.00 | 3.50 ± 0.58 | 3.86 ± 0.00 | 5.50 ± 0.55 | 5.00 ± 1.00 | 3.50 ± 0.58 | 3.57 ± 0.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsatalas, T.; Bellis, G.; Karampina, E.; Krommidas, C.; Tsilfoglou, F.; Patas, A.; Fotos, C.; Kokkotis, C.; Jamurtas, A.Z.; Giakas, G. Development and Usability of a Prototype Upper Extremities Lever-Driven Exercise System. BioMed 2023, 3, 32-49. https://doi.org/10.3390/biomed3010003
Tsatalas T, Bellis G, Karampina E, Krommidas C, Tsilfoglou F, Patas A, Fotos C, Kokkotis C, Jamurtas AZ, Giakas G. Development and Usability of a Prototype Upper Extremities Lever-Driven Exercise System. BioMed. 2023; 3(1):32-49. https://doi.org/10.3390/biomed3010003
Chicago/Turabian StyleTsatalas, Themistoklis, George Bellis, Evangeli Karampina, Charalampos Krommidas, Fotios Tsilfoglou, Athanasios Patas, Christos Fotos, Christos Kokkotis, Athanasios Z. Jamurtas, and Giannis Giakas. 2023. "Development and Usability of a Prototype Upper Extremities Lever-Driven Exercise System" BioMed 3, no. 1: 32-49. https://doi.org/10.3390/biomed3010003