
Analysis of the Influence of Variable Meteorological Conditions on the Performance of the EV Battery and on the Driving Range

Abstract
:1. Introduction
2. Theoretical Background
2.1. Effects of Temperature on Battery Capacity
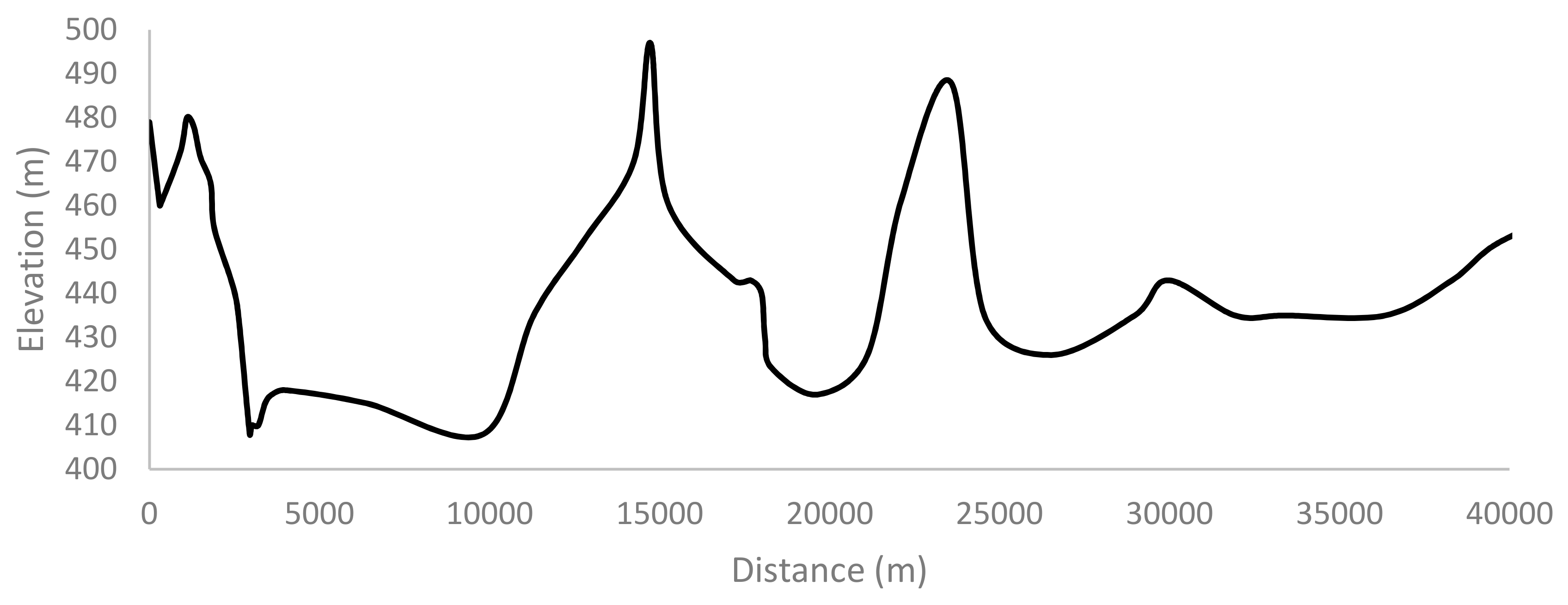
2.2. Driving Conditions
2.3. Methodological Procedure
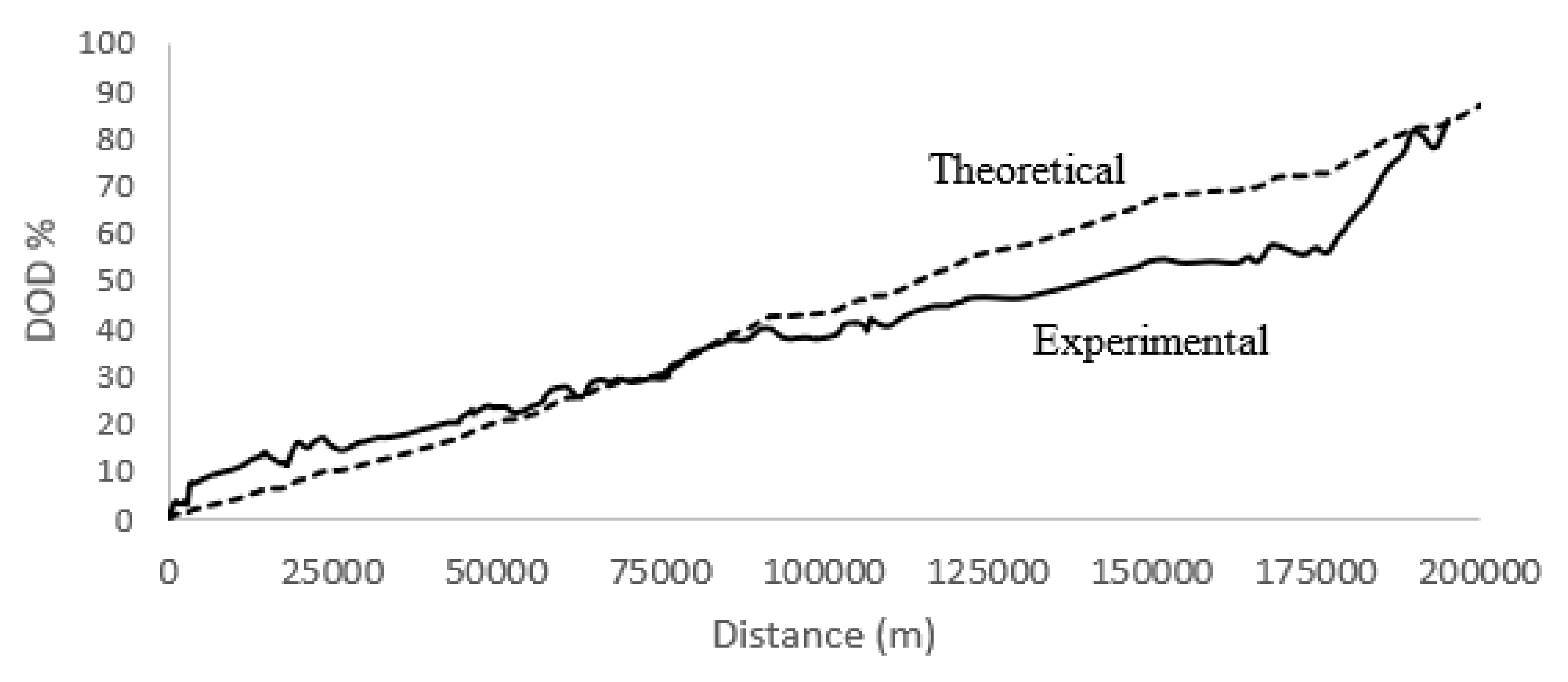
2.4. Modeling and Simulation
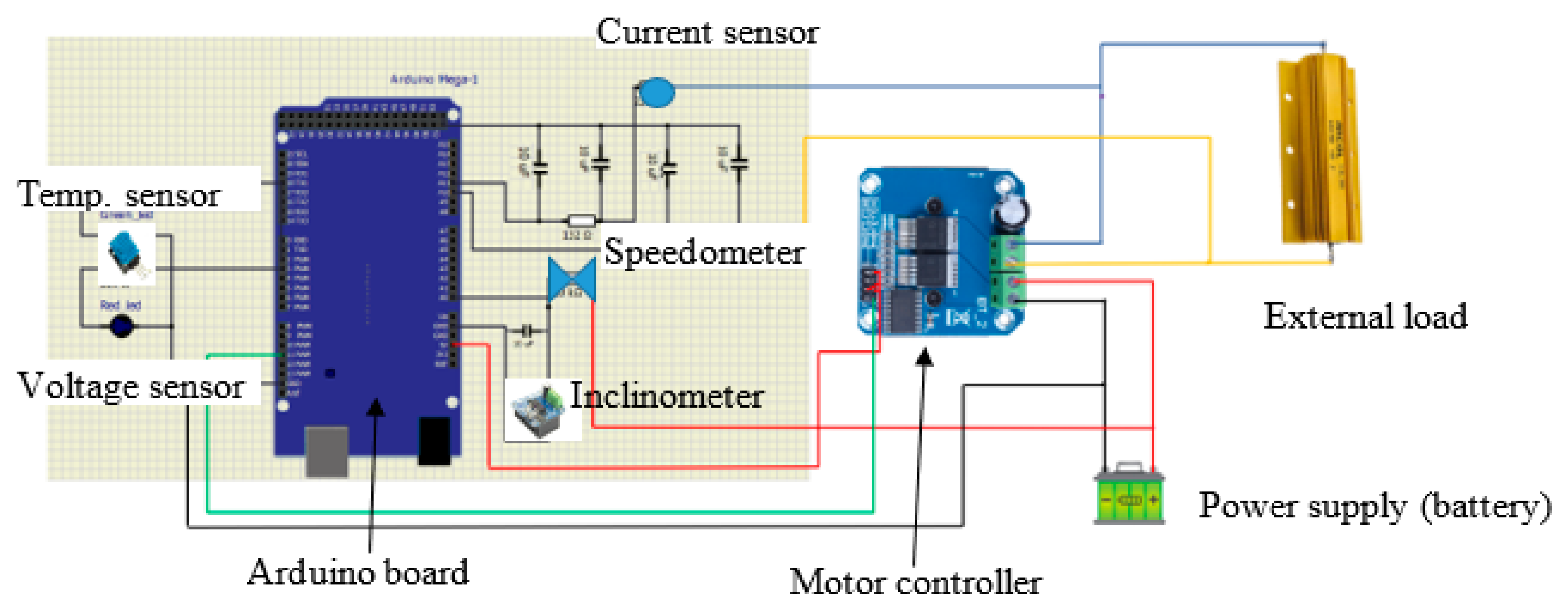
2.5. Experimental Tests
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbols | |
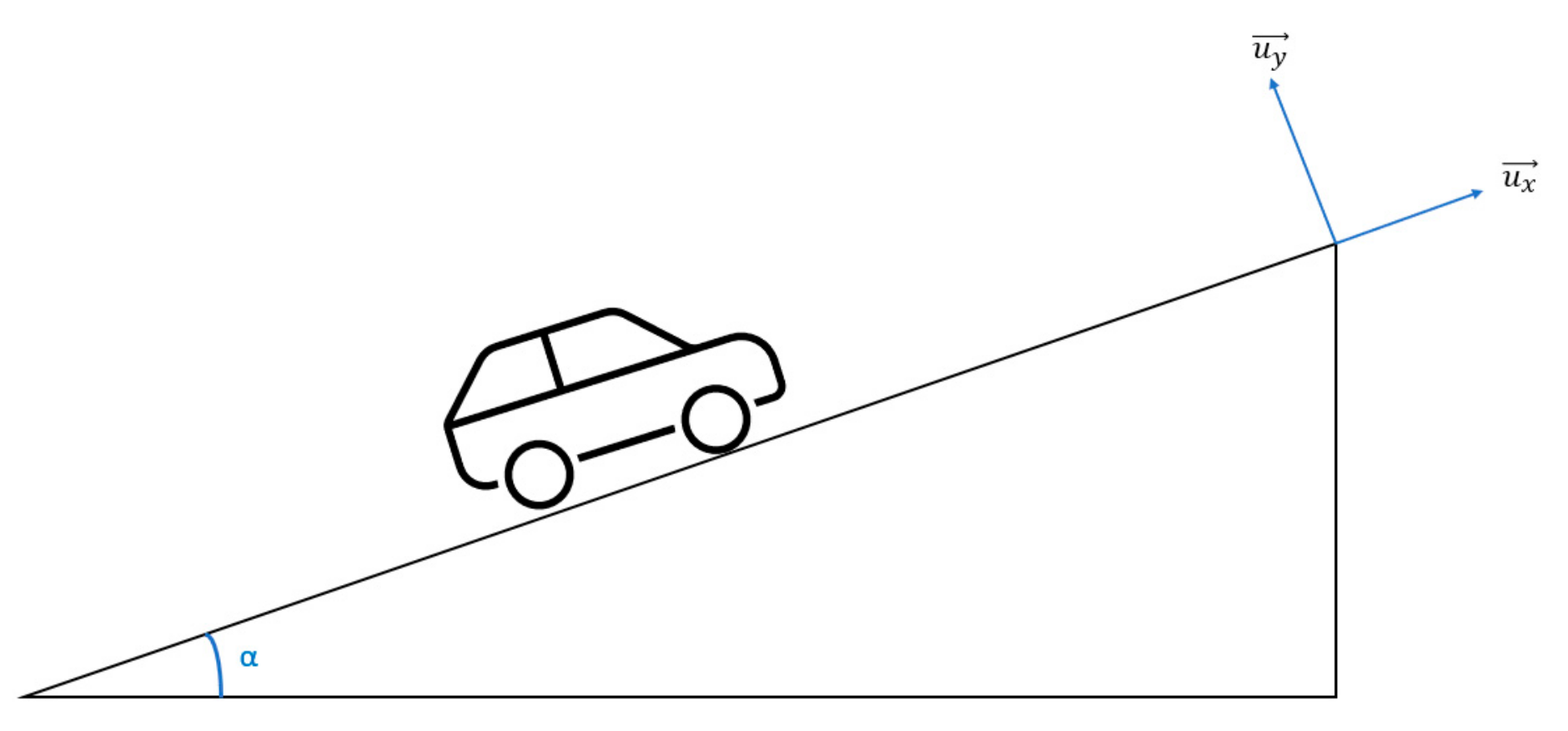
| α | Road slope angle |
| Cj | Capacity of the battery at the current state |
| Cn | Nominal capacity of the battery |
| Cr | Rolling coefficient |
| CT | Real capacity of the battery at a temperature T |
| Cx | Dynamic drag coefficient |
| d | Distance |
| ξ | Energy |
| F | Force |
| fC | Battery capacity correction factor |
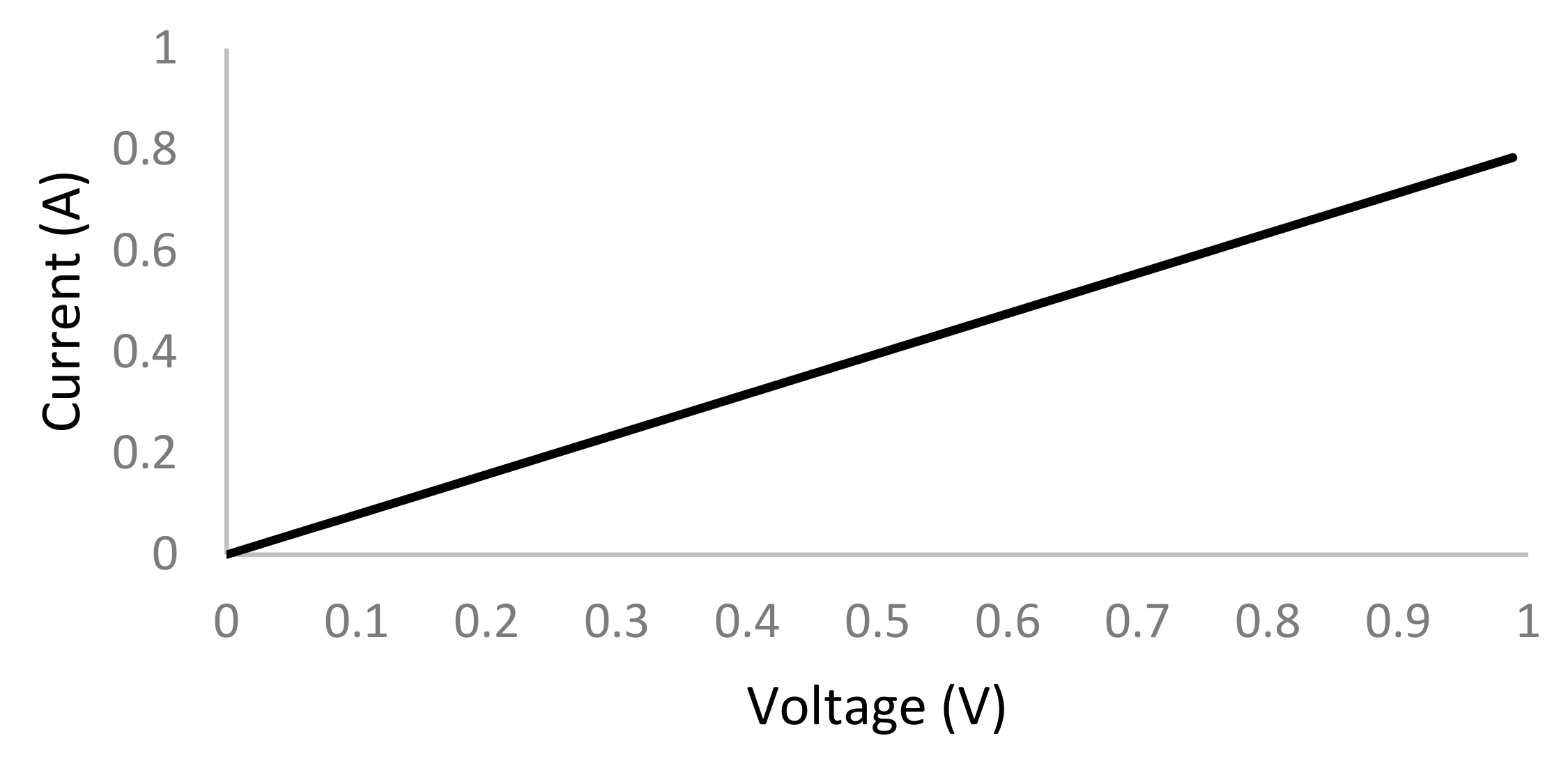
| I | Current |
| ID | Discharge current |
| Iref | Reference discharge current |
| κ | Drag force coefficient |
| m | Mass of the vehicle |
| Pt | Power |
| po | Pressure of tires |
| Rdr | Driving range rate of the electric vehicle for standard conditions |
| ρa | Air density |
| S | Front area of the vehicle |
| TD | Temperature at the discharge |
| Tref | Temperature of reference |
| t | Time |
| tD | Time of discharge |
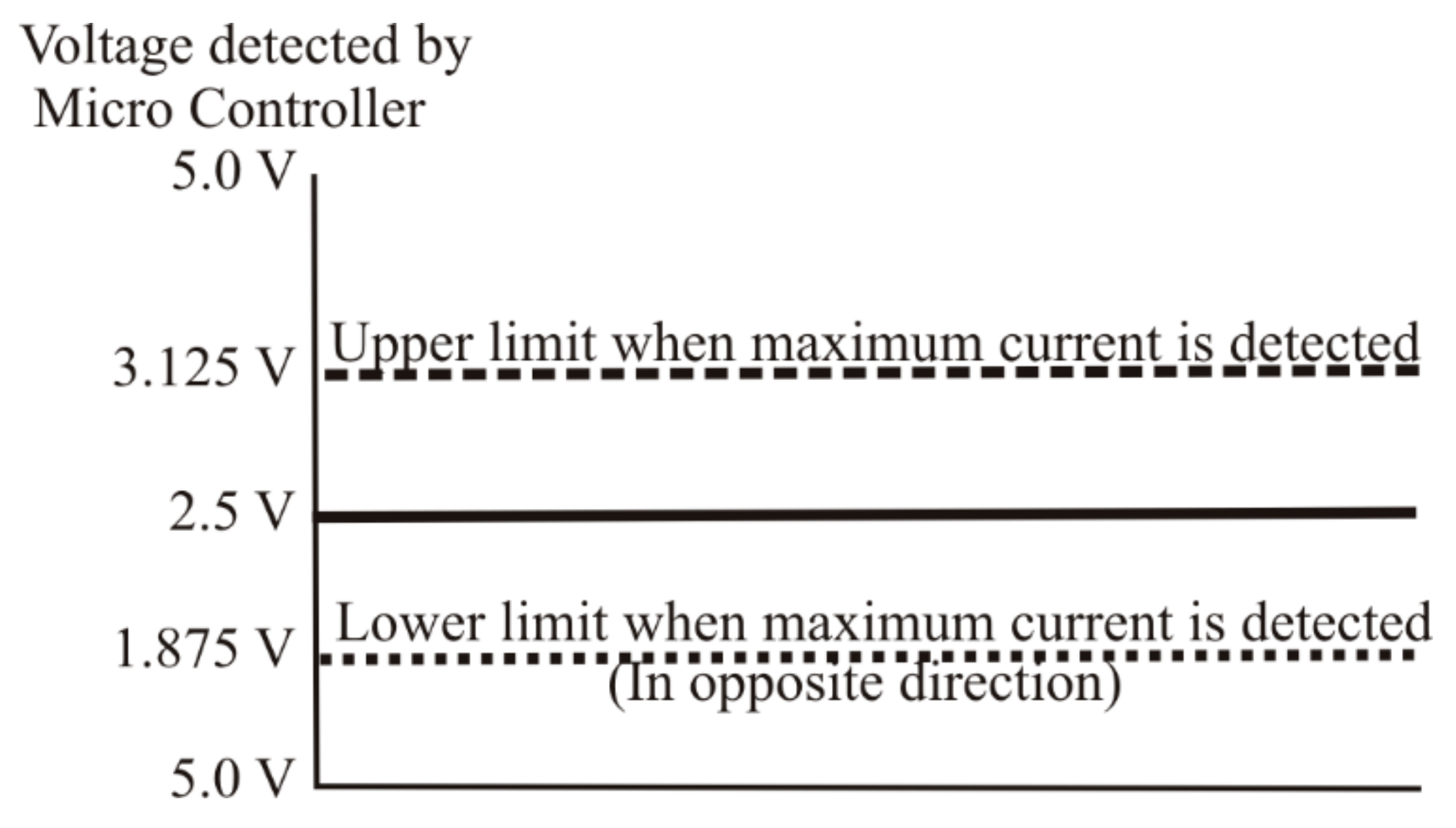
| V | Voltage |
| Vbat | Battery voltage |
| VPR | voltage of the power resistor |
| vv | Vehicle speed |
| vw | Wind velocity |
| Abbreviations | |
| BTS | Bridge Transmission System |
| DOD | Depth of Discharge |
| DR | Driving Range |
| EC | European Commission |
| ECMS | Equivalent Consumption Minimization Strategy |
| EV | Electric Vehicle |
| GIS | Geographical Information System |
| HEV | Hybrid Electric Vehicle |
| MPC | Model Predictive Control |
| PHEV | Plug-in Hybrid Electric Vehicle |
| PWM | Pulse Wave (Signal) Modulation |
References
- Rietmann, N.; Lieven, T. A comparison of policy measures promoting electric vehicles in 20 countries. In The Governance of Smart Transportation Systems; Springer: Cham, Germany, 2019; pp. 125–145. [Google Scholar]
- Kester, J.; Noel, L.; de Rubens, G.Z.; Sovacool, B.K. Policy mechanisms to accelerate electric vehicle adoption: A qualitative review from the Nordic region. Renew. Sustain. Energy Rev. 2018, 94, 719–731. [Google Scholar] [CrossRef]
- Knez, M.; Obrecht, M. Policies for Promotion of Electric Vehicles and Factors Influencing Consumers’ Purchasing Decisions of Low Emission Vehicles. J. Sustain. Dev. Energy, Water Environ. Syst. 2017, 5, 151–162. [Google Scholar] [CrossRef]
- Mačiulis, P.; Konstantinavičiutė, I.; Pilinkienė, V. Assessment of electric vehicles promotion measures at the national and local administrative levels. Eng. Econ. 2018, 29, 434–445. [Google Scholar] [CrossRef]
- He, H.; Jin, L.; Cui, H.; Zhou, H. Assessment of Electric Car Promotion Policies in Chinese Cities. International Council on Clean Transportation. 2018, pp. 1–49. Available online: https://theicct.org/sites/default/files/publications/China_city_NEV_assessment_20181018.pdf (accessed on 20 January 2023).
- Petrauskiene, K.; Dvarioniene, J.; Kaveckis, G.; Kliaugaite, D.; Chenadec, J.; Hehn, L.; Pérez, B.; Bordi, C.; Scavino, G.; Vignoli, A.; et al. Situation Analysis of Policies for Electric Mobility Development: Experience from Five European Regions. Sustainability 2020, 12, 2935. [Google Scholar] [CrossRef]
- Ercan, T.; Onat, N.C.; Keya, N.; Tatari, O.; Eluru, N.; Kucukvar, M. Autonomous electric vehicles can reduce carbon emissions and air pollution in cities. Transp. Res. Part D Transp. Environ. 2022, 112, 103472. [Google Scholar] [CrossRef]
- Wolfram, P.; Lutsey, N. Electric Vehicles: Literature Review of Technology Costs and Carbon Emissions; The International Council on Clean Transportation: Washington, DC, USA, 2016; pp. 1–23. [Google Scholar]
- Märtz, A.; Plötz, P.; Jochem, P. Global perspective on CO2 emissions of electric vehicles. Environ. Res. Lett. 2021, 16, 054043. [Google Scholar] [CrossRef]
- Fuinhas, J.A.; Koengkan, M.; Leitão, N.C.; Nwani, C.; Uzuner, G.; Dehdar, F.; Relva, S.; Peyerl, D. Effect of Battery Electric Vehicles on Greenhouse Gas Emissions in 29 European Union Countries. Sustainability 2021, 13, 3611. [Google Scholar] [CrossRef]
- Noshadravan, A.; Cheah, L.; Roth, R.; Freire, F.; Dias, L.; Gregory, J. Stochastic comparative assessment of life-cycle greenhouse gas emissions from conventional and electric vehicles. Int. J. Life Cycle Assess. 2015, 20, 854–864. [Google Scholar] [CrossRef]
- Leard, B.; McConnell, V. Progress and Potential for Electric Vehicles to Reduce Carbon Emissions. Resources for the Future (RFF) Report. 2020, pp. 20–24. Available online: https://www.rff.org/publications/reports/potential-role-and-impact-evs-us-decarbonization-strategies/ (accessed on 20 January 2023).
- Koengkan, M.; Fuinhas, J.A.; Teixeira, M.; Kazemzadeh, E.; Auza, A.; Dehdar, F.; Osmani, F. The Capacity of Battery-Electric and Plug-in Hybrid Electric Vehicles to Mitigate CO2 Emissions: Macroeconomic Evidence from European Union Countries. World Electr. Veh. J. 2022, 13, 58. [Google Scholar] [CrossRef]
- Teixeira, A.C.R.; Sodré, J.R. Impacts of replacement of engine powered vehicles by electric vehicles on energy consumption and CO2 emissions. Transp. Res. Part D Transp. Environ. 2018, 59, 375–384. [Google Scholar] [CrossRef]
- Petrović, Đ.T.; Pešić, D.R.; Petrović, M.M.; Mijailović, R. Electric cars: Are they solution to reduce CO2 emission? Therm. Sci. 2020, 24 Pt A, 2879–2889. [Google Scholar]
- Ziefle, M.; Beul-Leusmann, S.; Kasugai, K.; Schwalm, M. Public Perception and Acceptance of Electric Vehicles: Exploring Users’ Perceived Benefits and Drawbacks. In International Conference of Design, User Experience, and Usability; Springer: Cham, Switzerland, 2014; pp. 628–639. [Google Scholar]
- Schlüter, J.; Weyer, J. Car sharing as a means to raise acceptance of electric vehicles: An empirical study on regime change in automobility. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 185–201. [Google Scholar] [CrossRef]
- Murugan, M.; Marisamynathan, S.; Panjwani, T. Investigating the Influencing Factors to Adopt Public Electric Vehicle Charging Facility at Existing Fueling Station: A Study Based on Users Perceptive. In Recent Advances in Transportation Systems Engineering and Management; Springer: Singapore, 2023; pp. 851–868. [Google Scholar]
- Pareek, S.; Sujil, A.; Ratra, S.; Kumar, R. Electric vehicle charging station Challenges and opportunities: A future perspective. In Proceedings of the 2020 International Conference on Emerging Trends in Communication, Control and Computing (ICONC3), Sikar, India, 21–22 February 2020; IEEE: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Martínez-Lao, J.; Montoya, F.G.; Montoya, M.G.; Manzano-Agugliaro, F. Electric vehicles in Spain: An overview of charging systems. Renew. Sustain. Energy Rev. 2017, 77, 970–983. [Google Scholar] [CrossRef]
- Mruzek, M.; Gajdáč, I.; Kučera, Ľ.; Barta, D. Analysis of Parameters Influencing Electric Vehicle Range. Procedia Eng. 2016, 134, 165–174. [Google Scholar] [CrossRef]
- Baek, D.; Chen, Y.; Bocca, A.; Bottaccioli, L.; Di Cataldo, S.; Gatteschi, V.; Pagliari, D.J.; Patti, E.; Urgese, G.; Chang, N.; et al. Battery-Aware Operation Range Estimation for Terrestrial and Aerial Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5471–5482. [Google Scholar] [CrossRef]
- Lu, R.; Yang, A.; Xue, Y.; Xu, L.; Zhu, C. Analysis of the key factors affecting the energy efficiency of batteries in electric vehicle. World Electr. Veh. J. 2010, 4, 9–13. [Google Scholar] [CrossRef]
- Du, J.; Chen, J.; Song, Z.; Gao, M.; Ouyang, M. Design method of a power management strategy for variable battery capacities range-extended electric vehicles to improve energy efficiency and cost-effectiveness. Energy 2017, 121, 32–42. [Google Scholar] [CrossRef]
- Gerssen-Gondelach, S.J.; Faaij, A.P. Performance of batteries for electric vehicles on short and longer term. J. Power Sources 2012, 212, 111–129. [Google Scholar] [CrossRef]
- Wang, K.; Wang, S.; Liu, J.; Guo, Y.; Mao, F.; Wu, H.; Zhang, Q. Fe-Based Coordination Polymers as Battery-Type Electrodes in Semi-Solid-State Battery–Supercapacitor Hybrid Devices. ACS Appl. Mater. Interfaces 2021, 13, 15315–15323. [Google Scholar] [CrossRef]
- Armenta-Déu, C.; Jach, Q. Battery/Supercapacitor Hybrid System for Electric Vehicles. J. Automob. Eng. Appl. 2022, 9, 20–42. [Google Scholar]
- Onori, S.; Serrao, L.; Rizzoni, G. Adaptive Equivalent Consumption Minimization Strategy for Hybrid Electric Vehicles. In Proceedings of the ASME 2010 Dynamic Systems and Control Conference, Cambridge, MA, USA, 12–15 September 2010; Volume 2, pp. 499–505. [Google Scholar]
- Tulpule, P.; Marano, V.; Rizzoni, G. Energy management for plug-in hybrid electric vehicles using equivalent consumption minimisation strategy. Int. J. Electr. Hybrid Veh. 2010, 2, 329. [Google Scholar] [CrossRef]
- Jalali, M.; Hashemi, E.; Khajepour, A.; Chen, S.-K.; Litkouhi, B. Integrated model predictive control and velocity estimation of electric vehicles. Mechatronics 2017, 46, 84–100. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Sun, F. Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage system. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Minh, V.T.; Rashid, A.A. Modeling and model predictive control for hybrid electric vehicles. Int. J. Automot. Technol. 2012, 13, 477–485. [Google Scholar] [CrossRef]
- Ma, S.; Jiang, M.; Tao, P.; Song, C.; Wu, J.; Wang, J.; Deng, T.; Shang, W. Temperature effect and thermal impact in lithium-ion batteries: A review. Prog. Nat. Sci. 2018, 28, 653–666. [Google Scholar] [CrossRef]
- Belt, J.R.; Ho, C.D.; Miller, T.J.; Habib, M.A.; Duong, T.Q. The effect of temperature on capacity and power in cycled lithium ion batteries. J. Power Sources 2005, 142, 354–360. [Google Scholar] [CrossRef]
- Lu, Z.; Yu, X.; Wei, L.; Cao, F.; Zhang, L.; Meng, X.; Jin, L. A comprehensive experimental study on temperature-dependent performance of lithium-ion battery. Appl. Therm. Eng. 2019, 158, 113800. [Google Scholar] [CrossRef]
- Alipour, M.; Ziebert, C.; Conte, F.V.; Kizilel, R. A Review on Temperature-Dependent Electrochemical Properties, Aging, and Performance of Lithium-Ion Cells. Batteries 2020, 6, 35. [Google Scholar] [CrossRef]
- Liao, L.; Zuo, P.; Ma, Y.; Chen, X.; An, Y.; Gao, Y.; Yin, G. Effects of temperature on charge/discharge behaviors of LiFePO4 cathode for Li-ion batteries. Electrochim. Acta 2012, 60, 269–273. [Google Scholar] [CrossRef]
- Karimi, G.; Li, X. Thermal management of lithium-ion batteries for electric vehicles. Int. J. Energy Res. 2013, 37, 13–24. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Luo, L.; Fan, Y.; Du, Z. A review on thermal management of lithium-ion batteries for electric vehicles. Energy 2022, 238, 121652. [Google Scholar] [CrossRef]
- Yuksel, T.; Michalek, J.J. Effects of Regional Temperature on Electric Vehicle Efficiency, Range, and Emissions in the United States. Environ. Sci. Technol. 2015, 49, 3974–3980. [Google Scholar] [CrossRef] [PubMed]
- Armenta-Deu, C.; Carriquiry, J.P.; Guzmán, S. Capacity correction factor for Li-ion batteries: Influence of the discharge rate. J. Energy Storage 2019, 25, 839. [Google Scholar] [CrossRef]
- Hausmann, A.; Depcik, C. Expanding the Peukert equation for battery capacity modeling through inclusion of a temperature dependency. J. Power Sources 2013, 235, 148–158. [Google Scholar] [CrossRef]
- Alhamadani, O. Road Path Selection Using Geographic Information System GIS. Univ. Baghdad Eng. J. 2006, 12, 295–303. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
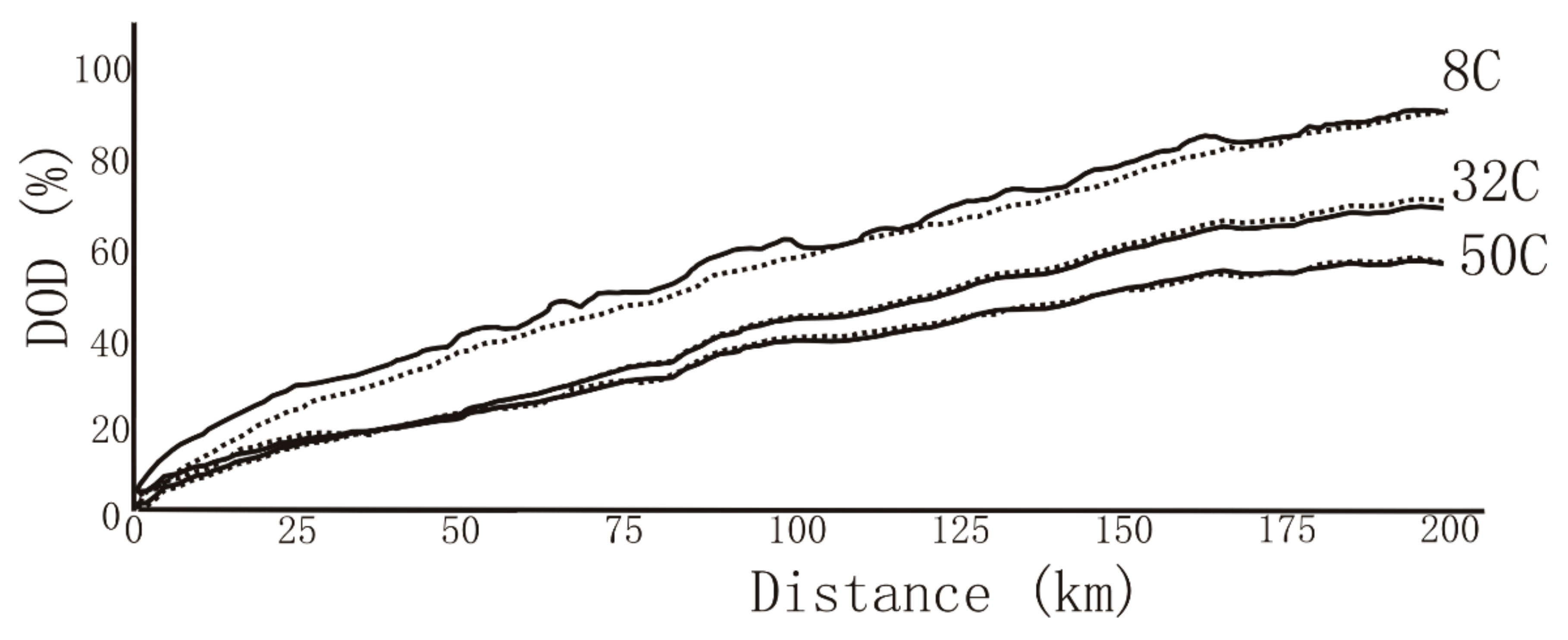
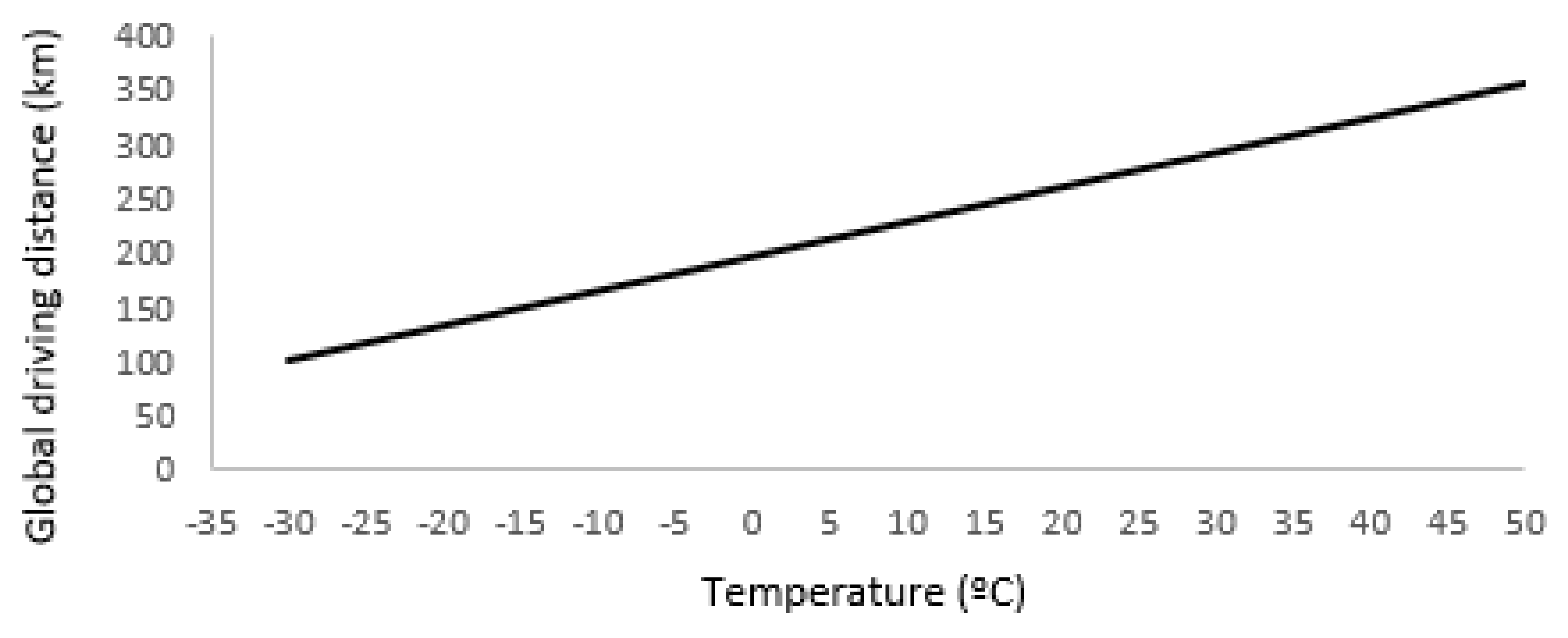
| Temperature (°C) | 8 | 32 | 50 |
| Driving distance (km) | 225.1 | 290.2 | 359.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Armenta-Déu, C.; Giorgi, B. Analysis of the Influence of Variable Meteorological Conditions on the Performance of the EV Battery and on the Driving Range. Future Transp. 2023, 3, 626-642. https://doi.org/10.3390/futuretransp3020037
Armenta-Déu C, Giorgi B. Analysis of the Influence of Variable Meteorological Conditions on the Performance of the EV Battery and on the Driving Range. Future Transportation. 2023; 3(2):626-642. https://doi.org/10.3390/futuretransp3020037
Chicago/Turabian StyleArmenta-Déu, Carlos, and Baptiste Giorgi. 2023. "Analysis of the Influence of Variable Meteorological Conditions on the Performance of the EV Battery and on the Driving Range" Future Transportation 3, no. 2: 626-642. https://doi.org/10.3390/futuretransp3020037