
The Influence of Different Footwear Insole Stiffness on Center of Pressure and Ankle Kinematics during Walking: A Case Report


Biomechanics Research Lab., Department of Kinesiology, San Jose State University, San Jose, CA 95192, USA
Biomechanics 2022, 2(2), 205-212; https://doi.org/10.3390/biomechanics2020017
Submission received: 24 March 2022
/
Revised: 22 April 2022
/
Accepted: 27 April 2022
/
Published: 1 May 2022
(This article belongs to the Topic Human Movement Analysis)
Abstract
:During locomotion, the foot–ankle system plays an important role for forward progression of the body. The center of pressure (COP) is regarded as the point of the ground reaction force (GRF) vector acting on the foot surface during the stance phase. COP movement trajectory and velocity reflect the stance phase forward progression of the foot segment and the ankle joint motion characteristics. This study aimed to investigate different levels of footwear insole stiffness on COP forward velocity, GRF and ankle joint angles during walking stance phase. Two healthy subjects (one female, one male; age 26.5 ± 6.4 years, height 168.5 ± 2.1 cm, weight 64.9 ± 5.4 kg) participated in this study. Subjects were asked to walk along a 10 m walkway at two different speeds: self–selected normal (SSN) and self–selected fast (SSF). Within each walking speed, subjects were required to walk under two different insole stiffness conditions: (1) normal shoe insole (NSI) from the testing shoe (Nike Free RN Flyknit 2017) used in this study; (2) 1.6 mm thick carbon fiber insole (CFI) fitted within the testing shoe. Stiffer insole (CFI) significantly decreased peak ankle internal rotation angle (p = 0.001) and sagittal plane angle ROM (p = 0.022); additionally, CFI significantly increased peak ankle eversion angle compared to the NSI condition (p = 0.028). In conclusion, increasing footwear insole stiffness would alter stance phase ankle joint motion at SSF walking speed. Additionally, stiffer insoles may tend to decrease COP peak velocity at the initial heel strike and the terminal stance phase. Future research should investigate the combined effects of various insole properties on lower extremity system kinematic and kinetic patterns in various locomotion activities.
1. Introduction
Human locomotion involves the interaction between the foot–ankle system, footwear and the ground. The foot–ankle system serves an important role for locomotion, such as for body support, balance control and mechanical energy generation and transfer [1,2]. With the newly developed footwear insole technologies, it was reported that different insole mechanical properties can influence walking and running gait performance [3,4,5,6]. Specifically, stiffer footwear insole was reported to reduce the metatarsal–phalangeal (MTP) joints extension movement [3,4,7], shifting the center of pressure (COP) location more anterior along the foot [4,8,9]. This would result in a larger ground reaction force (GRF) lever arm, greater ankle plantar flexor muscles gear ratio [3,4,8] and improved gait performance [3,6,10].
Previous footwear insole studies were mainly focused on the ankle plantar flexor muscle mechanics, foot–ankle mechanical work and the metabolic cost during locomotion [2,3,4,9,11]. Additionally, different footwear insole types were reported to have different effects on the foot and knee joint loading among different musculoskeletal abnormal conditions, such as knee osteoarthritis and plantar fasciitis [12,13,14,15,16,17,18,19,20,21,22,23,24]. Specifically, compared to the prefabricated insole, soft EVA insoles was reported to reduce the pain during walking and some mobility improvement among plantar fasciitis patients [12,22,23]. Moreover, in addition to the material types, the insole molding, prescribing and stiffness should also be regarded as the important factors [12,16,25,26]. Further investigation is needed to identify the relationship between foot–ankle system motion and the knee joint loading in various activities [12,16,25,26]. Other factors, such as aging and balance control mechanisms, were also investigated based on the foot position during locomotion [27,28]. It was reported that older adults had a shorter body displacement and an earlier reaction time compared to younger adults, due to the compensatory mechanisms for the slower muscular response among elderly people [28].
Although the previous studies had investigated various aspects of insole properties on lower limb mechanics, little is known whether stiffer insole will influence COP velocity and the GRF outcome measures in walking gait. The COP is regarded as the point of GRF vector acting on the foot surface during the ground contact period of locomotion [29,30]. The COP forward movement velocity provides the insight of the foot loading and gait mechanical patterns [29,31,32]. Additionally, the COP velocity and GRF values are two important factors related to the ankle plantar flexor moment and the gear ratio, both of which influence the gait performance [3,4,9]. Moreover, ankle joint angle provides the information of the foot–ankle system loading and response during ground contact. It remains unknown whether a stiffer insole would influence the peak ankle angles and range of motion (ROM) during the walking stance phase.
The purpose of this study was to investigate different levels of footwear insole stiffness on COP forward velocity, GRF measures, the peak ankle joint angles and ROM during the stance phase of walking. It was hypothesized that a stiffer insole would: (1) decrease the peak COP forward velocity; (2) increase the horizontal and vertical GRF peak and mean values; (3) decrease peak ankle angles and ROM.
2. Materials and Methods
2.1. Participants
Two healthy subjects (one female, one male; age 26.5 ± 6.4 years, height 168.5 ± 2.1 cm, weight 64.9 ± 5.4 kg) participated in this study. All subjects signed informed written consent in accordance with the University’s Institutional Review Board before participation and they did not have any lower extremity musculoskeletal–related injuries for the past six months before the test.
2.2. Biomechanical Data Collection
Fifty–seven retro–reflective markers were placed on the skin surface of the subjects. They were asked to walk along a 10 m walkway at two different speeds conditions: self–selected normal (SSN) and self–selected fast (SSF). Within each walking speed, subjects were required to walk under two different insole stiffness conditions: (1) normal shoe insole (NSI) from the testing shoe (Nike Free RN Flyknit 2017) used in this study; (2) 1.6 mm thick carbon fiber insole (CFI) fitted within the testing shoe.
A twelve–camera motion capture system (Vicon, Oxford, UK) was used to capture the marker position data at 120 Hz. GRF data were collected at 1200 Hz by three force plates (AMTI, Watertown, MA, USA) embedded within the walkway. The kinematic and kinetic data were filtered with a low–pass fourth–order Butterworth filter at 6 Hz and 50 Hz, respectively.
2.3. Data Analysis
COP position data, the anterior–posterior (AP) direction velocity, as well as the GRF outcome measures were calculated and derived from Visual 3D (C–Motion, Inc., Germantown, MD, USA). We divided stance phase into three different sub phases for COP velocity evaluation: the COP velocity from 0–20% of stance phase was regarded as the rearfoot; 20–90% of stance phase as the midfoot; 90–100% of stance phase as the forefoot and toe [29,32]. Additionally, peak and mean GRF measures in horizontal and vertical direction, as well as the positive and negative horizontal direction GRF impulse () were calculated. was calculated as the positive or negative horizontal GRF integrated over time, respectively. Moreover, ankle joint angles were calculated in a standard inverse dynamics model in Visual 3D. Peak ankle angles and the ROM in the frontal, transverse and sagittal plane were also calculated for all the conditions. Paired sample t–test was conducted between NSI and CFI for all outcome measures in SPSS (V26.0, IBM, Armonk, NY, USA). All the figures for COP velocity and trajectory, GRF measures were plotted in the Matlab program (R2021a, Mathworks, Natick, MA, USA).
3. Results
3.1. COP Peak Velocity (Center of Pressure Kinematic Pattern)
3.2. Peak and Mean GRF and Impulse (Ground Reaction Force Kinetic Pattern)
3.3. Ankle Joint Angles (Foot–Ankle System Kinematic Pattern)
We found some significant differences of the ankle joint angles between the NSI and CFI condition at SSF speed (Table 4): CFI significantly decreased peak ankle internal rotation angle (p = 0.001) and sagittal plane angle ROM (p = 0.022); additionally, CFI significantly increased peak ankle eversion angle compared to the NSI condition (p = 0.028).
4. Discussion
This study investigated whether stiffer footwear insole would alter rearfoot, midfoot and forefoot COP peak velocity, GRF mean and peak measures, as well as peak ankle joint angles and ROM during stance phase of walking across different speeds. The initial hypothesis that increasing insole stiffness would decrease the peak COP forward velocity, increase the GRF peak and mean outcome measures was not supported. The hypothesis that stiffer insole would decrease peak ankle angle and ROM was partially supported. Due to the small sample size in this study, we only found some significant differences for peak ankle angles and ROM between NSI and CFI at SSF walking speed.
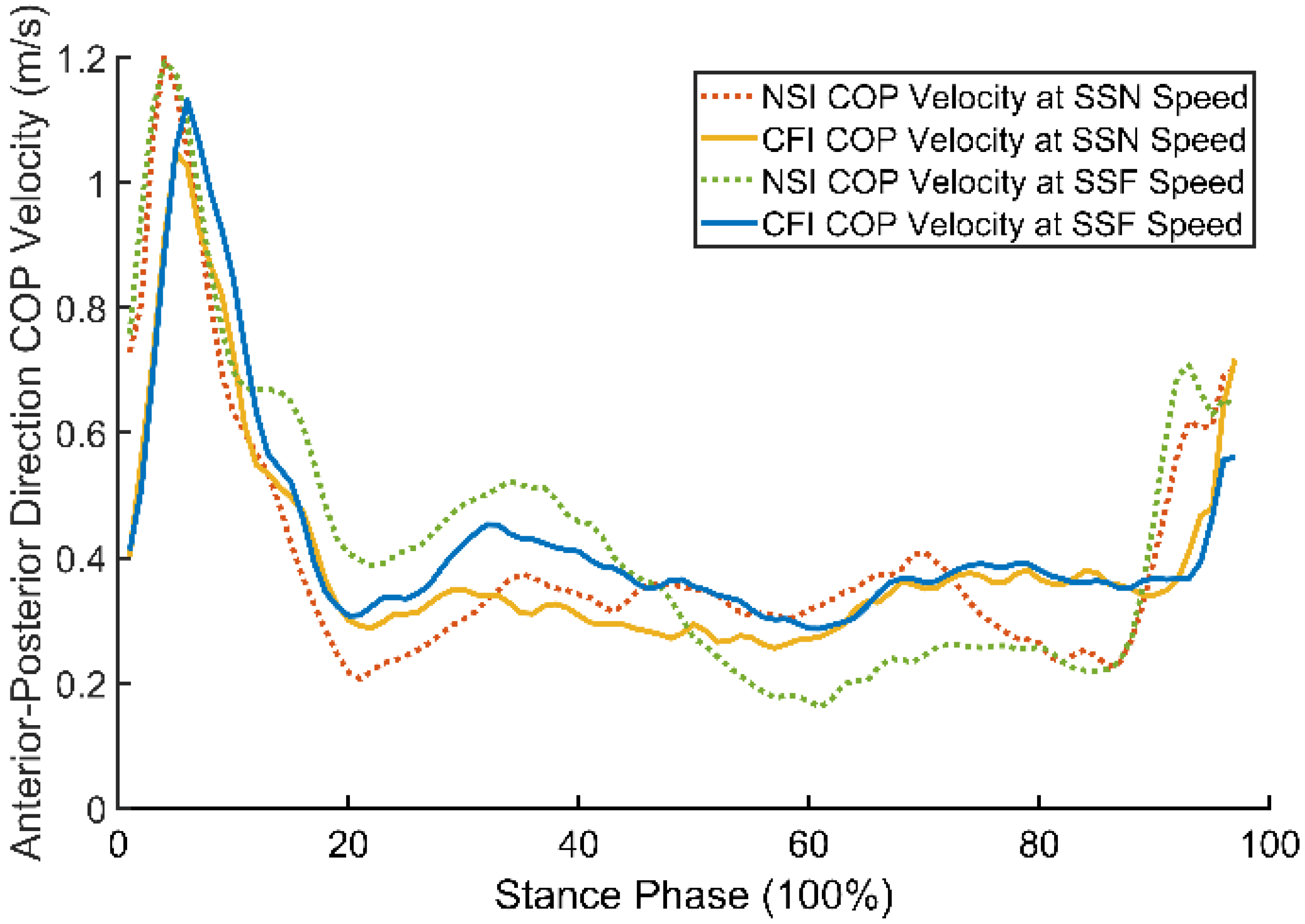
The COP trajectory and velocity reflect the stance phase forward progression of the foot segment [29,33]. The COP velocity at the rearfoot, midfoot and forefoot corresponds to the initial heel strike, mid–stance and the terminal–stance phase, respectively [29,32,34]. However, there was no significant difference for COP peak velocity between NSI and CFI condition in the AP direction. At the initial heel strike phase, COP peak velocity in CFI was 8.35% lower than in NSI condition at SSN speed (Table 1 and Figure 1). This indicates that a stiffer insole may tend to decrease the forward progression of the heel strike to foot flat position during the stance phase, and this may not be beneficial for the loading response and the forward progression of the foot–ankle system in the first half of the stance phase. Additionally, previous studies reported soft footwear insole would tend to provide some shock absorption during the ground contact and lead to pain reductions for plantar fasciitis patients [12,22,23]. Future footwear design should consider the insole stiffness and the heel rocker relationship, and a soft insole, which can enable the smooth transition from the rearfoot to midfoot roll–over progression in the early stance phase.
At the terminal stance phase (forefoot and toe area), we found that the COP peak velocity in CFI was 28.51% lower than in NSI at SSF speed (Table 1 and Figure 1). This implies that CFI may tend to decrease the ankle plantar flexion movement in the terminal stance phase, and the peak ankle plantar flexion angle (PPFA) in CFI was 61.67% lower than in the NSI condition at SSF speed, which also confirms that finding (Table 4). A decreased ankle plantar flexion angle in terminal stance would result in a reduced ankle joint positive mechanical work generation, due to the decreased ankle plantar flexor power [29,35]. This finding is also in agreement with a previous study, which reported decreased ankle positive mechanical work and the work ratio when wearing stiffer footwear insole while walking [2].
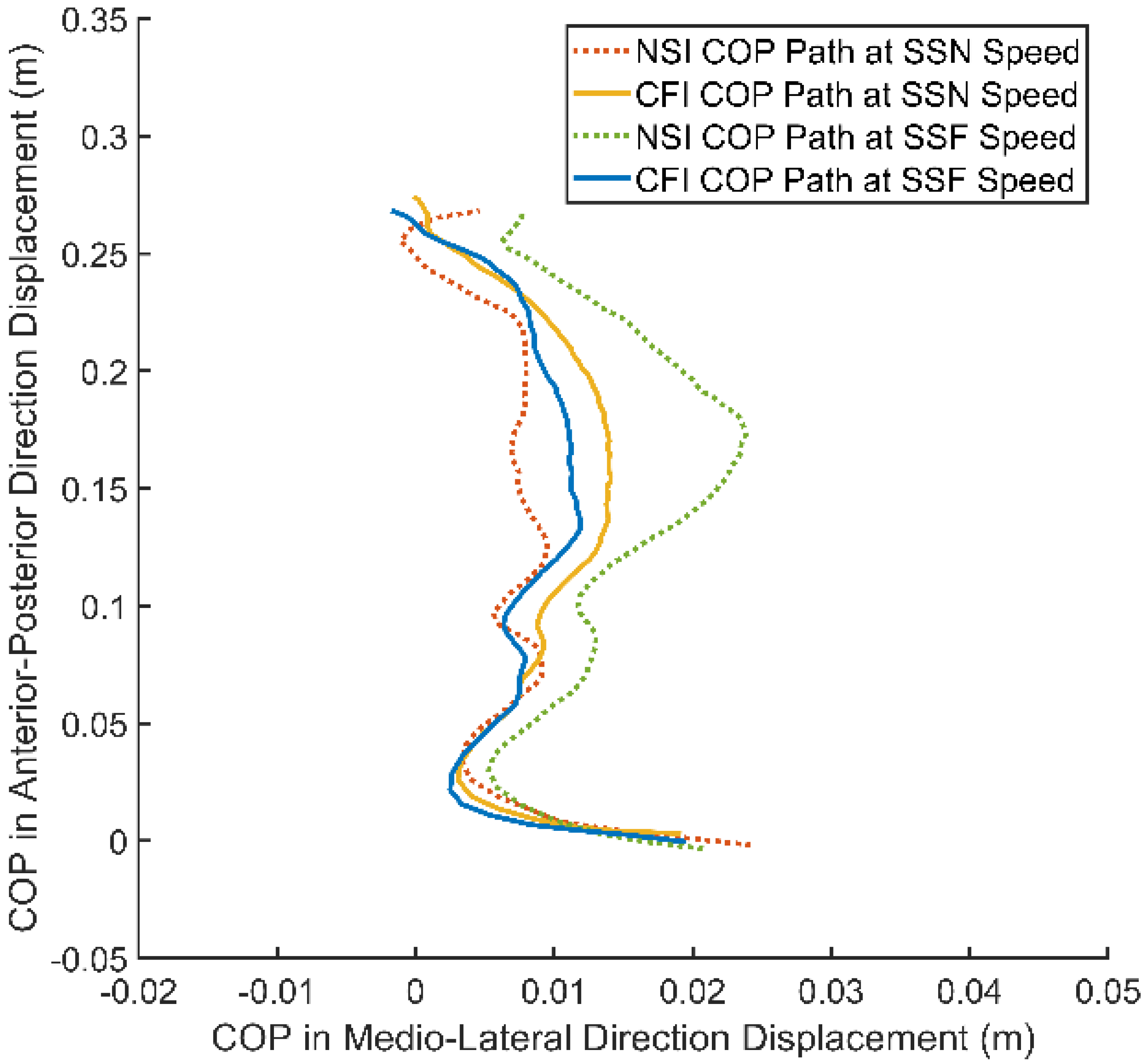
Additionally, a stiffer insole also decreased the transverse plane peak ankle angles and ROM. Specifically, CFI significantly decreased the peak internal rotation angle (PIRA) at SSF speed; moreover, the peak external rotation angle (PERA) and transverse plane ROM were 34.16% and 29.47% lower, respectively, in CFI than in NSI at SSF speed (Table 4). This indicates that a stiffer insole would decrease the foot segment medial–lateral (ML) direction rotation movement around the ankle joint. The reduced ML direction COP displacement in Figure 2 also confirms that finding. Stiffer footwear insole would tend to decrease the foot–ankle system ROM in both transverse and sagittal planes, while the soft insole would provide more mobility, which was in agreement with the previous findings [12,22,23]. Decreased ankle ROM and COP displacement in the transverse plane should be beneficial for improving the gait balance control during the walking stance phase. While for certain populations with an abnormal lower extremity musculoskeletal system function, such as plantar fasciitis and knee osteoarthritis, choosing a soft insole might be helpful for reducing the pain syndromes and gain some short–term functional benefits [12,22,23]. The main limitation for this case report is the small sample size, and only young and healthy subjects were recruited. In addition to that, only two different insoles were compared with the same type of footwear. A future study should compare a wider range of insole stiffness levels and footwear types during walking and running across speeds, as well as the influence on the knee and hip joint mechanics. Additionally, it is necessary to investigate other factors, such as insole material, geometry, moldings, stiffness and the heel rocker combined effects on the foot–ankle system’s kinematic and kinetic patterns in various locomotion activities, as well as the evaluation of different insole mechanical patterns’ influence on various musculoskeletal system abnormal conditions.
5. Conclusions
In conclusion, increasing footwear insole stiffness alters stance phase ankle joint motion at SSF walking speed. As the walking speed increases, a stiffer footwear insole significantly reduces the transverse plane peak ankle angles and the sagittal plane angle ROM. Increasing the insole stiffness may tend to decrease the COP peak velocity at the initial heel strike and the terminal stance phase. When wearing different footwear insoles, horizontal and vertical GRF measures tend to remain unchanged. Future research should investigate the influence of the combined effects of insole stiffness, material, geometry, moldings and heel rocker–related factors on lower extremity system kinematic and kinetic patterns in various locomotion activities.
Funding
This research received no external funding.
Institutional Review Board Statement
This study was conducted according to the guidelines of the Declaration of Helsinki and approved by the Institutional Review Board of the San Jose State University.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abboud, R.J. (I) Relevant Foot Biomechanics. Curr. Orthop. 2002, 16, 165–179. [Google Scholar] [CrossRef] [Green Version]
- Jin, L. The effects of increasing insole stiffness on foot and ankle mechanics in walking gait. Biomed. Eng. Appl. Basis Commun. 2021, 33, 2150023. [Google Scholar] [CrossRef]
- Ray, S.F.; Takahashi, K.Z. Gearing Up the Human Ankle-Foot System to Reduce Energy Cost of Fast Walking. Sci. Rep. 2020, 10, 8793. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, K.Z.; Gross, M.T.; van Werkhoven, H.; Piazza, S.; Sawicki, G.S. Adding Stiffness to the Foot Modulates Soleus Force-Velocity Behaviour during Human Walking. Sci. Rep. 2016, 6, 29870. [Google Scholar] [CrossRef]
- Stefanyshyn, D.; Fusco, C. Increased Shoe Bending Stiffness Increases Sprint Performance. Sport Biomech. 2004, 3, 55–66. [Google Scholar] [CrossRef]
- Hoogkamer, W.; Kipp, S.; Kram, R. The Biomechanics of Competitive Male Runners in Three Marathon Racing Shoes: A Randomized Crossover Study. Sports Med. 2019, 49, 133–143. [Google Scholar] [CrossRef]
- Willwacher, S.; König, M.; Potthast, W.; Brüggemann, G.-P. Does Specific Footwear Facilitate Energy Storage and Return at the Metatarsophalangeal Joint in Running? J. Appl. Biomech. 2013, 29, 583–592. [Google Scholar] [CrossRef] [Green Version]
- Willwacher, S.; König, M.; Braunstein, B.; Goldmann, J.-P.; Brüggemann, G.-P. The gearing function of running shoe longitudinal bending stiffness. Gait Posture 2014, 40, 386–390. [Google Scholar] [CrossRef]
- Beck, O.N.; Golyski, P.R.; Sawicki, G.S. Adding carbon fiber to shoe soles may not improve running economy: A muscle-level explanation. Sci. Rep. 2020, 10, 17154. [Google Scholar] [CrossRef]
- Roy, J.-P.R.; Stefanyshyn, D. Shoe Midsole Longitudinal Bending Stiffness and Running Economy, Joint Energy, and EMG. Med. Sci. Sports Exerc. 2006, 38, 562–569. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, K.Z.; Worster, K.; Bruening, D.A. Energy neutral: The human foot and ankle subsections combine to produce near zero net mechanical work during walking. Sci. Rep. 2017, 7, 15404. [Google Scholar] [CrossRef] [PubMed]
- Mendes, A.A.M.T.; Silva, H.J.D.A.; Costa, A.R.A.; Pinheiro, Y.T.; Lins, C.A.D.A.; De Souza, M.C. Main types of insoles described in the literature and their applicability for musculoskeletal disorders of the lower limbs: A systematic review of clinical studies. J. Bodyw. Mov. Ther. 2020, 24, 29–36. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, P.T.; Ferreira, A.F.; Pereira, R.M.R.; Bonfa, E.; Borba, E.; Fuller, R. Effectiveness of medial-wedge insole treatment for valgus knee osteoarthritis. Arthritis Care Res. 2008, 59, 603–608. [Google Scholar] [CrossRef] [PubMed]
- Lewinson, R.T.; Wiley, J.P.; Humble, R.N.; Worobets, J.T.; Stefanyshyn, D.J. Altering Knee Abduction Angular Impulse Using Wedged Insoles for Treatment of Patellofemoral Pain in Runners: A Six-Week Randomized Controlled Trial. PLoS ONE 2015, 10, e0134461. [Google Scholar] [CrossRef]
- Powers, C.M.; Chen, P.-Y.; Reischl, S.F.; Perry, J. Comparison of Foot Pronation and Lower Extremity Rotation in Persons with and without Patellofemoral Pain. Foot Ankle Int. 2002, 23, 634–640. [Google Scholar] [CrossRef] [PubMed]
- Shih, Y.-F.; Wen, Y.-K.; Chen, W.-Y. Application of wedged foot orthosis effectively reduces pain in runners with pronated foot: A randomized clinical study. Clin. Rehabil. 2011, 25, 913–923. [Google Scholar] [CrossRef]
- van Raaij, T.M.; Reijman, M.; Brouwer, R.W.; Bierma-Zeinstra, S.M.A.; Verhaar, J.A.N. Medial Knee Osteoarthritis Treated by Insoles or Braces: A Randomized Trial. Clin. Orthop. Relat. Res. 2010, 468, 1926–1932. [Google Scholar] [CrossRef] [Green Version]
- Bennell, K.L.; Bowles, K.-A.; Payne, C.; Cicuttini, F.; Williamson, E.; Forbes, A.; Hanna, F.; Davies-Tuck, M.; Harris, A.; Hinman, R. Lateral wedge insoles for medial knee osteoarthritis: 12 month randomised controlled trial. BMJ 2011, 342, d2912. [Google Scholar] [CrossRef] [Green Version]
- Dessery, Y.; Belzile, É.; Turmel, S.; Corbeil, P. Effects of foot orthoses with medial arch support and lateral wedge on knee adduction moment in patients with medial knee osteoarthritis. Prosthetics Orthot. Int. 2017, 41, 356–363. [Google Scholar] [CrossRef]
- De Campos, G.C.; Rezende, M.U.; Pasqualin, T.; Frucchi, R.; Neto, R.B. Lateral wedge insole for knee osteoarthritis: Randomized clinical trial. Sao Paulo Med. J. 2015, 133, 13–19. [Google Scholar] [CrossRef] [Green Version]
- Sattari, S.; Ashraf, A. Comparison of the Effects of 3-Point Valgus Stress Knee Support and Lateral Wedge Insoles in Medial Compartment Knee Osteoarthritis. Iran. Red Crescent Med. J. 2011, 13, 581–584. [Google Scholar] [CrossRef] [PubMed]
- Landorf, K.B.; Keenan, A.-M.; Herbert, R.D. Effectiveness of Foot Orthoses to Treat Plantar Fasciitis: A Randomized Trial. Arch. Intern. Med. 2006, 166, 1305–1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oliveira, H.A.V.; Jones, A.; Moreira, E.; Jennings, F.; Natour, J. Effectiveness of Total Contact Insoles in Patients with Plantar Fasciitis. J. Rheumatol. 2015, 42, 870–878. [Google Scholar] [CrossRef] [PubMed]
- Yucel, U.; Kucuksen, S.; Cingoz, H.T.; Anlıacik, E.; Ozbek, O.; Salli, A.; Ugurlu, H. Full-length silicone insoles versus ultrasound-guided corticosteroid injection in the management of plantar fasciitis: A Randomized Clinical Trial. Prosthetics Orthot. Int. 2013, 37, 471–476. [Google Scholar] [CrossRef] [Green Version]
- Withnall, R.; Eastaugh, J.; Freemantle, N. Do shock absorbing insoles in recruits undertaking high levels of physical activity reduce lower limb injury? A randomized controlled trial. J. R. Soc. Med. 2006, 99, 32–37. [Google Scholar] [CrossRef]
- Andreasen, J.; Mølgaard, C.M.; Christensen, M.; Kaalund, S.; Lundbye-Christensen, S.; Simonsen, O.; Voigt, M. Exercise therapy and custom-made insoles are effective in patients with excessive pronation and chronic foot pain—A randomized controlled trial. Foot 2013, 23, 22–28. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, T.; Liu, M.; Chen, Q. Active Balance Control of Humanoid Locomotion Based on Foot Position Compensation. J. Bionic Eng. 2020, 17, 134–147. [Google Scholar] [CrossRef]
- Romano, D.; Bloemberg, J.; Tannous, M.; Stefanini, C. Impact of Aging and Cognitive Mechanisms on High-Speed Motor Activation Patterns: Evidence from an Orthoptera-Robot Interaction. IEEE Trans. Med. Robot. Bionics 2020, 2, 292–296. [Google Scholar] [CrossRef]
- Fuchioka, S.; Iwata, A.; Higuchi, Y.; Miyake, M.; Kanda, S.; Nishiyama, T. The Forward Velocity of the Center of Pressure in the Midfoot is a Major Predictor of Gait Speed in Older Adults. Int. J. Gerontol. 2015, 9, 119–122. [Google Scholar] [CrossRef] [Green Version]
- Chesnin, K.J.; Selby-Silverstein, L.; Besser, M.P. Comparison of an in-shoe pressure measurement device to a force plate: Concurrent validity of center of pressure measurements. Gait Posture 2000, 12, 128–133. [Google Scholar] [CrossRef]
- Otsuki, T.; Nawata, K.; Okuno, M. Quantitative evaluation of gait pattern in patients with osteoarthrosis of the knee before and after total knee arthroplasty. Gait analysis using a pressure measuring system. J. Orthop. Sci. 1999, 4, 99–105. [Google Scholar] [CrossRef] [PubMed]
- Cornwall, M.; McPoil, T. Velocity of the center of pressure during walking. J. Am. Podiatr. Med. Assoc. 2000, 90, 334–338. [Google Scholar] [CrossRef] [PubMed]
- Schmid, M.; Beltrami, G.; Zambarbieri, D.T.; Verni, G. Centre of pressure displacements in trans-femoral amputees during gait. Gait Posture 2005, 21, 255–262. [Google Scholar] [CrossRef] [PubMed]
- Jamshidi, N.; Rostami, M.; Najarian, S.; Menhaj, M.B.; Saadatnia, M.; Salami, F. Differences in center of pressure trajectory between normal and steppage gait. J. Res. Med. Sci. 2010, 15, 33–40. [Google Scholar]
- Judge, J.O.; Davis, R.B.; Ounpuu, S. Step Length Reductions in Advanced Age: The Role of Ankle and Hip Kinetics. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 1996, 51A, M303–M312. [Google Scholar] [CrossRef]
Figure 1.
Group average (n = 2) stance phase anterior–posterior direction center of pressure (COP) velocity between NSI and CFI condition at SSN and SSF walking speeds.
Figure 1.
Group average (n = 2) stance phase anterior–posterior direction center of pressure (COP) velocity between NSI and CFI condition at SSN and SSF walking speeds.

Figure 2.
Group average (n = 2) stance phase center of pressure (COP) trajectory in anterior–posterior and medial–lateral directions between NSI and CFI condition at SSN and SSF walking speeds.
Figure 2.
Group average (n = 2) stance phase center of pressure (COP) trajectory in anterior–posterior and medial–lateral directions between NSI and CFI condition at SSN and SSF walking speeds.

Figure 3.
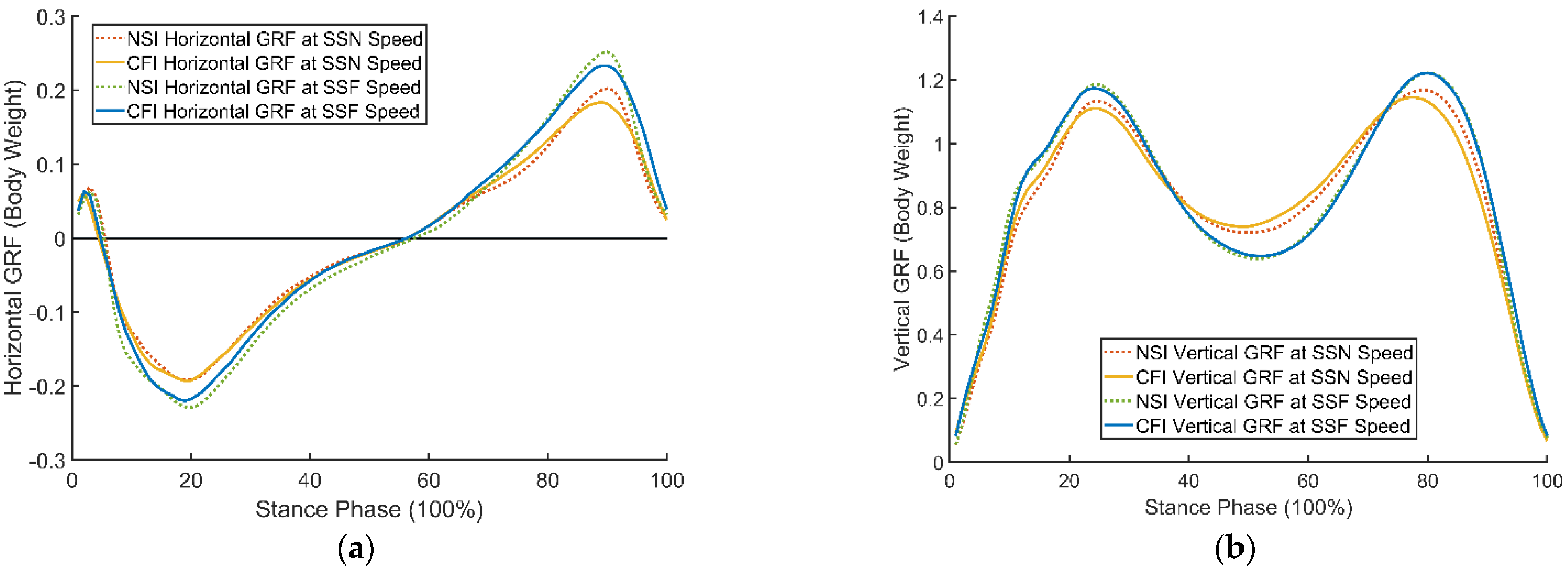
Group average (n = 2) horizontal (a) and vertical (b) direction ground reaction force (GRF) between CFI and NSI condition at SSN and SSF walking speeds.
Figure 3.
Group average (n = 2) horizontal (a) and vertical (b) direction ground reaction force (GRF) between CFI and NSI condition at SSN and SSF walking speeds.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Center of pressure (COP) peak velocity between the NSI and CFI condition. Sample Mean (SD); n = 2.
Table 1.
Center of pressure (COP) peak velocity between the NSI and CFI condition. Sample Mean (SD); n = 2.
| Peak Velocity (m/s) | SSN | SSF | ||
|---|---|---|---|---|
| NSI | CFI | NSI | CFI | |
| 1.20 (0.58) | 1.10 (0.56) | 1.19 (0.53) | 1.19 (0.53) | |
| 0.50 (0.04) | 0.49 (0.04) | 0.60 (<0.01) | 0.56 (0.06) | |
| 0.70 (0.27) | 0.72 (0.22) | 0.76 (0.21) | 0.57 (0.04) | |
: COP peak velocity at rearfoot. : COP peak velocity at midfoot. : COP peak velocity at forefoot.
Table 2.
Ground reaction force (GRF) mean and peak measures between NSI and CFI condition. Sample Mean (SD); n = 2.
Table 2.
Ground reaction force (GRF) mean and peak measures between NSI and CFI condition. Sample Mean (SD); n = 2.
| GRF (BW) | SSN | SSF | ||
|---|---|---|---|---|
| NSI | CFI | NSI | CFI | |
| GRF Mean | ||||
| −0.05 (0.01) | −0.05 (0.01) | −0.06 (0.01) | −0.05 (0.01) | |
| 0.05 (<0.01) | 0.05 (<0.01) | 0.05 (<0.01) | 0.06 (0.01) | |
| 0.81 (0.03) | 0.81 (0.03) | 0.82 (0.02) | 0.82 (0.02) | |
| GRF Peak | ||||
| −0.19 (0.05) | −0.18 (0.04) | −0.23 (0.02) | −0.22 (0.06) | |
| 0.20 (0.02) | 0.18 (0.01) | 0.25 (<0.01) | 0.24 (<0.01) | |
| 1.19 (0.04) | 1.17 (<0.01) | 1.23 (0.03) | 1.25 (0.03) | |
: Horizontal GRF negative mean. : Horizontal GRF positive mean. : Vertical GRF positive mean. : Horizontal GRF negative peak. : Horizontal GRF positive peak.: Vertical GRF positive peak. BW: body weight.
Table 3.
Horizontal ground reaction force (GRF) impulse ( ) between the NSI and CFI condition. Sample Mean (SD); n = 2.
Table 3.
Horizontal ground reaction force (GRF) impulse ( ) between the NSI and CFI condition. Sample Mean (SD); n = 2.
| SSN | SSF | |||
|---|---|---|---|---|
| NSI | CFI | NSI | CFI | |
| −0.03 (0.01) | −0.03 (0.01) | −0.04 (0.01) | −0.03 (0.01) | |
| 0.03 (<0.01) | 0.03 (0.01) | 0.03 (<0.01) | 0.03 (0.01) | |
: Horizontal GRF negative impulse. : Horizontal GRF positive impulse. BW: body weight.
Table 4.
Ankle joint peak angles and range of motion (ROM) measures between NSI and CFI condition. Sample Mean (SD); n = 2.
Table 4.
Ankle joint peak angles and range of motion (ROM) measures between NSI and CFI condition. Sample Mean (SD); n = 2.
| Joint Angle (Degree) | SSN | SSF | ||
|---|---|---|---|---|
| NSI | CFI | NSI | CFI | |
| Frontal Plane | ||||
| PEVA | −5.10 (1.64) | −4.52 (2.19) | −4.37 (1.75) * | −5.09 (1.70) * |
| PIVA | 6.46 (2.25) | 8.13 (4.32) | 8.00 (2.09) | 7.42 (4.87) |
| FROM | 11.56 (0.61) | 12.66 (2.13) | 12.37 (0.35) | 12.51 (3.17) |
| Transverse Plane | ||||
| PERA | 5.48 (2.93) | 6.34 (2.82) | 6.39 (5.02) | 4.53 (2.96) |
| PIRA | 19.97 (5.81) | 16.74 (4.27) | 23.04 (5.59) * | 16.90 (5.58) * |
| TROM | 14.49 (2.88) | 10.39 (1.45) | 16.65 (0.57) | 12.37 (2.62) |
| Sagittal Plane | ||||
| PPFA | −9.34 (1.49) | −7.83 (0.82) | −13.91 (0.52) | −7.35 (2.23) |
| PDFA | 14.44 (2.27) | 14.65 (4.01) | 12.17 (1.56) | 14.50 (3.47) |
| SROM | 23.78 (0.79) | 22.49 (3.19) | 26.08 (1.03) * | 21.86 (1.23) * |
PEVA: Peak eversion angle. PIVA: Peak inversion angle. FROM: Frontal plane angle ROM. PERA: Peak external rotation angle. PIRA: Peak internal rotation angle. TROM: Transverse plane angle ROM. PPFA: Peak plantar flexion angle. PDFA: Peak dorsiflexion angle. SROM: Sagittal plane angle ROM. * p < 0.05.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Jin, L. The Influence of Different Footwear Insole Stiffness on Center of Pressure and Ankle Kinematics during Walking: A Case Report. Biomechanics 2022, 2, 205-212. https://doi.org/10.3390/biomechanics2020017
AMA Style
Jin L. The Influence of Different Footwear Insole Stiffness on Center of Pressure and Ankle Kinematics during Walking: A Case Report. Biomechanics. 2022; 2(2):205-212. https://doi.org/10.3390/biomechanics2020017
Chicago/Turabian StyleJin, Li. 2022. "The Influence of Different Footwear Insole Stiffness on Center of Pressure and Ankle Kinematics during Walking: A Case Report" Biomechanics 2, no. 2: 205-212. https://doi.org/10.3390/biomechanics2020017