

Electrification Alternatives for Open Pit Mine Haulage

School of Mechanical and Mining Engineering, The University of Queensland, Brisbane, QLD 4072, Australia
*
Author to whom correspondence should be addressed.
Mining 2023, 3(1), 1-25; https://doi.org/10.3390/mining3010001
Submission received: 27 November 2022
/
Revised: 23 December 2022
/
Accepted: 30 December 2022
/
Published: 1 January 2023
(This article belongs to the Special Issue Envisioning the Future of Mining)
Abstract
:Truck-Shovel (TS) systems are the most common mining system currently used in large surface mines. They offer high productivity combined with the flexibility to be rapidly relocated and to adjust load/haul capacity and capital expenditure according to market conditions. As the world moves to decarbonise as part of the transition to net zero emission targets, it is relevant to examine options for decarbonising the haulage systems in large surface mines. In-Pit Crushing and Conveying (IPCC) systems offer a smaller environmental footprint regarding emissions, but they are associated with a number of limitations related to high initial capital expenditure, capacity limits, mine planning and inflexibility during mine operation. Among the emerging technological options, innovative Trolley Assist (TA) technology promises to reduce energy consumption for lower carbon footprint mining systems. TA systems have demonstrated outstanding potential for emission reduction from their application cases. Battery and energy recovery technology advancements are shaping the evolution of TAs from diesel-electric truck-based patterns toward purely electrified BT ones. Battery Trolley (BT) systems combined with autonomous battery-electric trucks and Energy Recovery Systems (ERSs) are novel and capable of achieving further significant emission cuts for surface mining operations associated with safety, energy saving and operational improvements. This article reviews and compares electrification alternatives for large surface mines, including IPCC, TA and BT systems. These emerging technologies provide opportunities for mining companies and associated industries to adopt zero-emission solutions and help transition to an intelligent electric mining future.
1. Introduction
The current effects of climate change have created a worldwide consensus on the need for decarbonization [1]. In order to achieve the 2030 emission reduction task announced by governments, more specific technology measures will need to be applied to achieve measurable decarbonization. As an energy-intense sector, the mining industry is more dependent on fossil fuel energy than others. To date, Truck-Shovel (TS) systems are still the dominant open-pit mining haulage system, while In-Pit Crushing and Conveying (IPCC) has become an option to overcome long-distance transport in deep open pit mines. As a proven technology, Trolley Assist (TA) has shown excellent performance in saving diesel fuel and reducing emissions. With significant volatility in fuel markets, stricter environmental and social requirements, and the further advance of technologies, Battery Trolley (BT) systems are likely to guide an electrification revolution to create the first zero-emission truck fleet, which is a transition from the current diesel-electric trolley operation to battery-electric trolley haulage.
This paper investigates the current world energy outlook in carbon emissions, Australian mining sector emissions projection, renewable energy development, decarbonization technology trends and mining challenges to conclude that equipment electrification is a potential zero-emission direction. Except for conventional TS systems, there are several electrification alternatives for open pit haulage: IPCC systems, TA systems and future conceptual BT systems. At the time of this writing, due to hydrogen storage, infrastructure and logistic challenges, there is no hydrogen-power alternatives discussion in this paper. In these systems, conventional diesel-powered TS systems belong to a high-emission haulage alternative, while Fixed IPCC, Semi-Fixed IPCC, Semi-Mobile IPCC and TA systems belong to low-emission haulage alternatives. Furthermore, Fully mobile IPCC and BT systems belong to zero-emission haulage alternatives. This paper introduces all these haulage alternatives’ configurations, operations, characters, and pros and cons. As an electrification revolution to create the first zero-emission truck fleet solution, BT systems combinate several state-of-the-art technologies, including autonomous trucks, battery-electric power drivetrains, TA and energy recovery technologies. Like IPCC systems, BT systems have various configurations according to charging methods, whether to build a battery station and energy recovery approaches on the downhill ramp, which are:
- Dynamic charging BT systems;
- Stationary charging BT systems;
- Dual trolley BT systems.
According to mining haulage systems’ requirements, there is a comparison between diesel TS, IPCC, TA and BT systems from perspectives such as flexibility, energy efficiency, CAPEX, OPEX, and others.
This paper introduces the background of worldwide decarbonization targets and mining challenges, and presents evaluation parameters to compare all mining haulage systems’ pros and cons. It reviews conventional TS systems’ operating processes and characteristics, and introduces current electrification alternatives for open pit mine haulage. This paper reviews IPCC and TA systems’ advantages and disadvantages compared with the TS system and presents the conceptual BT systems’ theory, operating process and configurations. Finally, it compares the parameters between diesel TS, Semi-Fixed/Mobile IPCC, Full-Mobile IPCC, TA, Dynamic Charging BT, Stationary Charging BT and Dual Trolley BT.
2. Decarbonization and Mining Challenges
2.1. World Energy Outlook in Carbon Emissions
Figure 1 shows CO2 emissions in the World Energy Outlook. The Stated Policies Scenario (STEPS) takes account only of specific policies that are in place or have been announced by governments [2]. The Announced Pledges Case (APC) assumes that all announced national net zero pledges are achieved in full and on time, whether or not they are currently underpinned by specific policies [2]. The “implementation gap” between reported lowered emissions commitments and the regulatory frameworks and particular actions they need is highlighted by the 2.6 Gt difference in emissions between the STEPS and the APS in 2030. Pledges must be supported by robust, reliable policies and long-term strategies to become a reality [3]. In addition to underlining the need for specific policies and immediate measures necessary for long-term net-zero commitments, the divergence in trends between the APC and the STEPS demonstrates the potential effect of existing net-zero pledges. The APC shows, however, that existing net-zero pledges, even if fully achieved, fall well short of what is required to achieve net-zero global emissions by 2050 [2]. It clarifies what further steps must be taken to move beyond these proclaimed commitments and onto a path with a high probability of avoiding the worst impacts of climate change [3].
2.2. Australian Mining Sector Emissions
Figure 2 from the Australian Department of Industry, Science, Energy and Resources indicates that from 1990 to 2020, Australian stationary energy emissions increased at an average annual rate of 1.5%. As more decarbonization measures were implemented in 2020, emissions are expected to increase more slowly, at an average rate of less than 0.1% annually. The leading causes of growing global GHG levels are emissions from transportation, electricity generation, and industrial expansion, which have pressured many industry sectors to come up with strategies to cut emissions drastically in the future. Energy efficiency, electrification equipment, and replacing fossil fuels with low-emission alternatives in the electricity generation process are essential to achieving the APC pledges, particularly over the period to 2030 [2].
Corresponding to the mining industry, a large mining base, fossil-fuel reliance, and increasing truck fleet size are the key contributors to rising CO2 emissions [4]. The emissions from the mining subsector as whole are projected to increase from 19 Mt CO2-e in 2020 to 21 Mt CO2-e in 2030 because of mining needs. This increase is slowed due to technological advancements, including superior engine technology, increasing automation, and the electrification of mining equipment. Along with emissions reductions, these technological advancements also offer operating benefits such as fuel savings and productivity improvements [5].
2.3. Renewable Energy Development
The energy transition from fossil fuels to renewable energy resources is now one of the main challenges in achieving sustainable development goals [6]. Due to more significant widespread deployment, there have been considerable technological breakthroughs and cost reductions in wind and solar PV production during the last ten years [4]. From the most current developments in energy storage and renewable generation are reviewed, due to the growing price of fossil fuels, the adoption of carbon tax policies in some areas, and the falling capital costs of renewable generation and energy storage technology, renewables are becoming more cost-competitive [4].
A vast landmass and abundant sunshine and wind make Australia one of the world’s most renewable energy-rich nations [7]. In Australia, solar and wind resources are plentiful enough to supply renewable energy needs. Figure 3 and Figure 4 show the Australian solar and wind source maps [8]. In these figures: solar availability (good 1200–1600 MWh/m2, very good 1600–2000 MWh/m2, and excellent 2000–2400 MWh/m2); wind availability (good 6–7 m/s, very good 7–8 m/s, and excellent 8–9 m/s, wind speed measured at 100 m). Solar power was the primary thermal-displacing electricity source in Queensland and South Australia. In Tasmania, a mix of wind power and hydroelectricity, and in Western Australia, New South Wales and Victoria, a mixture of solar and wind power [9].
Australian National Electricity Market (NEM) renewables are projected to supply over 30 percent of electricity in 2021 and 55 percent in 2030. Emissions in the NEM will decline by more than 26 percent below 2005 levels by 2022 [5].
2.4. Technology Trends
All sectors of society must support decarbonization. The mining sector must encourage the use of renewable energy technology and other cost-effective low-emission technologies as a means of combating climate change [8]. It is possible to become competitive with and replace high-emission incumbents by making the electrification of mining equipment a priority technology [5]. Through the development of electrification and battery technologies, diesel-powered equipment at mining sites and transportation may be gradually replaced with a combination of electricity-power and energy storage technology. The mining sector will likely place more emphasis on electricity generation and battery storage as a result of the switch to an “all-electric” mine [8].
Transportation is crucial in reducing emissions associated with mining operations, particularly the mining truck fleet [4]. The mining sector is replacing fossil fuels by using renewable electricity to reduce the influence of fuel price volatility and decarbonization. Especially for remote mines that rely heavily on diesel generation on-site, renewable electricity generation and zero-emission truck fleets are critical to achieving a considerable emission reduction in the total mining facility emissions [4].
2.5. Mining Challenges
With the strong demand for minerals and the depletion of high-quality resources, there are many challenges facing the mining sector. These include:
- Greater depths and lower grades: Open pit mining depths have significantly expanded over the last two decades. Some open pit mines go down more than 1000 m in depth [10]. It is worth noting that future deposit extraction will inevitably be conducted at greater depths and lower grades compared to current practices, and this tendency is anticipated to continue [11,12].
- High operating cost: As mines become deeper and stripping ratios increase with a lower grade, more waste material needs to be extracted. The haulage truck fleet grows correspondingly, requiring more operators and maintenance staff and a subsequent increase in diesel consumption [12,13,14]. In addition, as copper ore grades decline, more ore needs to be processed to attain similar metal production. A decrease in copper ore grade between 0.2% to 0.4% requires seven times more energy than present-day operations [15,16]. Reducing the cost of truck haulage, which makes up about half of the operating expenses of a mining operation, is now more essential than ever [17].
- Fuel price volatility: Fossil fuel price volatility significantly impacts mining viability but is outside the control of most miners [9]. Figure 4 shows historical Australia diesel Terminal Gate Price (TGP) data. In the short term, the price of fossil fuels shows a propensity towards volatility, while it shows a significant rise from the long-term perspective.
3. Methodology
TS and IPCC systems have been widely deployed in existing open pit mines. TA systems have been proven in several mine sites and will spread to more current operating mines, while BT is still largely a conceptual decarbonization mining system, which will be put to the test in pilot mine sites. For the purpose of evaluating the selection of a mining haulage system, it is necessary to compare all these mining systems from many mining metric points, which are beneficial for mining decision-makers to select an optimum mining operating system for their mine sites. This paper adopts a mining system evaluation approach by analysing systems’ operations, configurations, and characteristics to measure their reasonable implementation scopes, pros and cons from mining haulage requirements perspectives. The following is the mining haulage system evaluation important parameters:
- Safety and productivity are indicators to measure system implementation scenarios.
- Energy efficiency, CAPEX, OPEX, maintenance requirements, service life, additional infrastructure requirements and heat generation are system financial metrics.
- Emissions and environmental footprint (noise/dust/DPM/vibration) are system environmental parameters.
- Flexibility, Capacity, Scalability, Refuelling/Recharging/Swapping methods are system productivity parameters.
4. Conventional Truck-Shovel Systems
4.1. Conventional Truck-Shovel System Operating Process
Conventional TS systems continue to dominate open pit mines because diesel-powered trucks are extremely flexible in handling various materials with good grade capabilities and easy manoeuvrability [18]. The classic TS system consists of various operating processes, including manoeuvres and queues to the load point, spotting, loading, hauling the material, manoeuvres and queues to the offload point, spotting, dumping, exit tipping point, returning [19,20,21], which has been shown in Figure 5. To date, TS systems are the most viable, flexible and widely used mining system, and autonomous trucks have further enhanced their safety and effectiveness [19,22].
4.2. Truck-Shovel Systems’ Characteristics
Truck-Shovel system continues to be the predominant mining hauling system of choice for surface mines because of its ease of implementation, high flexibility, and high scalability.
- 1.
- Ease of implementation
The majority upfront expenditures of TS systems are trucks and loaders (e.g., excavators and electric shovels). A greenfield project mine may begin operations with a relatively small truck-shovel fleet and expand production capacity by purchasing larger units as the mine matures [18]. In terms of mining design and layout, several hauling segments with suitable road design, such as grade and road width, are required to complete the transport cycle. From the commencement of mines, trucks and loaders are a very predictable and controllable means of haulage from economic and operational points of view [17].
- 2.
- High flexibility
TS systems’ high flexibility that they have become the dominant system in surface mining [23]. As TS systems are comprised of discrete elements, mine operators can dispatch each unit to a tailored working face to fulfil mine production requirements. Due to fewer mine design limitations and no infrastructure relocation, it’s easy to change the truck fleet deployment schedule and mining tasks. Most importantly, trucks are capable of adapting to different orebody shapes and geology conditions to adapt to unforeseen changes in an open pit mine.
- 3.
- High scalability
As a mine matures, additional trucks will be added to accommodate longer haul cycles, and larger trucks and shovels will be used to take advantage of economies of scale [24]. Additionally, the number and type of trucks and loaders used can be readily adjusted to change the production rate [17].
However, there are plenty of challenges with conventional TS system:
- 1.
- High operating costs
Approximately 40–60% (depending on the combination of hauling equipment) of operating costs are attributable to haulage and material handling, notably TS operations [20,25,26]. The transportation distance starts to grow as mines become deeper, which dramatically reduces truck productivity. In order to reach the nominal mine production rate, the number of trucks in deployment needs to be increased. The demand for operating costs, including capital expenditures, fuel consumption, workforce, haul road size, maintenance, and repair service centres, all grow as the number of trucks increases [17].
- 2.
- CO2 and diesel particular emissions
Diesel-powered trucks emit a considerable amount of gas emissions and unique toxic materials caused by diesel engines [27]. According to ABB statistics, a single mining truck emits up to 1000 tonnes of CO2 annually. It would take 46,000 trees to absorb [28].
- 3.
- Labour force shortage
It is estimated that a conventional truck requires approximately seven people to operate (including operating and maintenance) [24]. A two 12-h-shift-day roster consists of 4.4 operators (0.4 to account for covering vacations and absences) and 2.7 maintenance workers [11], which makes it difficult for a remote mine to recruit enough people to meet its more significant truck fleet needs.
- 4.
- Fuel price volatility
Fuel energy cost is one of the most significant expenditures in the mining sector, accounting for 15 to 40% (depending on mining system components) of total mine operating costs on average [15]. The classic TS system is susceptible to the volatility of the fossil fuel market since a significant portion of its energy derives from diesel fuel. Energy consumption, chiefly by diesel-powered truck operations, is anticipated to increase further as mining activity expands and demand for clean energy transformation metals rises [15].
- 5.
- Safety risks
As the most prevalent kind of transportation equipment, haul trucks are involved in many accidents at operating mine sites, inspiring research interest in high potential incidents and serious accidents [29]. According to a report, approximately one-third of the deaths in Australian open pit mines are attributed to vehicle collisions [18].
- 6.
- Maintenance
Internal combustion trucks are complex, requiring highly skilled mechanics and high maintenance costs for diesel-based engines. Another high cost is off-highway tyres because tyre wear will be severe as increasing truck units. In the meantime, ancillary equipment (e.g., grader, water truck and dozer) are applied to keep haul road and reduce environmental footprint with a good maintenance condition to support TS system performance. The maintenance cost of a conventional TS system is a significant portion of the hauling operating expenditure.
Leveraging the economies of scale over the past two decades, mines prefer to use larger trucks to increase productivity and reduce operating costs. However, larger trucks cannot eliminate TS disadvantages, and they have other negative impacts on downstream processes (crushing and milling). High benches and larger blasting patterns make it more difficult to separate ore from waste and cause uncontrollable dilution. Consequently, a substantial portion of ore material that meets the cut-off grade requirement becomes waste or marginal due to dilution. Again, a larger proportion of oversize material would make the comminution stage of the crushing and milling process more costly. From the whole mine-to-mill perspective, as feed grade is decreased, the processing recovery will result in a greater percentage of valuable input materials being transferred into waste [17,30].
Large open pit mines have increasingly invested in Autonomous Haulage Trucks (AHTs). A significant reduction in collision risks has been achieved with AHTs, along with high levels of productivity and tire performance [31]. While autonomous technologies can mitigate operator costs and improve energy efficiency, which is a significant portion of the haulage cost, they require a higher investment compared to conventional trucks with the same capacity [32]. Even with this sophistication, including the necessary hardware and software, these AHTs cannot overcome the many problems with increased travel distance [17]. More importantly, although AHTs are more fuel efficient, they cannot achieve the actual decarbonization of the mining industry.
4.3. Truck-Shovel Systems’ Energy Consumption
The science of measuring the performance (productivity and energy consumption) of mining equipment has evolved and reached maturity in terms of the truck haul cycle. During ramp climbs, Siemens (2009) [33] estimates that 70–80% percent of diesel fuel is consumed during haul operations. For an ultra-class dump truck, more than 40% of total energy is consumed to return the vehicle’s mass to the ramp’s top [33].
5. Electrification Alternatives for Open Pit Mine Haulage
5.1. In-Pit Crushing and Conveying Systems
5.1.1. IPCC Systems’ Configurations
IPCC systems were first used in open pit mining operations in 1956 as an alternative to the classic TS haulage technique [34]. Using a continuous mining operation method often overcomes many of the drawbacks of the TS system. More specifically, compared to the conventional transportation system, it is possible to reduce the labour force, fuel consumption, and material size [14,28,35,36]. While most IPCC systems were used for coal and ore materials in the past, which is beneficial for downstream processes, it is seen as an unnecessary operating cost for overburden waste materials [18]. To date, however, IPCC systems have been increasingly introduced for stripping waste operations in response to the increasing hauling distance and stripping workload.
IPCC systems consist of crushers, in-pit conveyors (fully mobile), stationary conveyors, conveyor crossings, tripper car spreaders (waste), slewing spreaders (waste) and radial stackers (mineralized material). There are a variety of IPCC system alternatives available. In general, there are four distinct sorts of IPCC systems, each with unique characteristics. The four broad categories are: Fixed, Semi-Fixed, Semi-Mobile, and Fully Mobile systems [11,13,24,37] and each characteristic shows in Table 1.
- 1.
- Fixed In-pit Crushing and Conveying systems (F-IPCC)
In F-IPCC systems, the crusher is installed at a fixed location during the lifetime of the mine with rarely relocated, usually near the pit rim and the crest of the pit. Within the pit, the material is transported from the working face to the crusher unit using conventional truck haulage. After being crushed, the material is fed into a conveying system that moves it to either a spreader (waste material) or a stacker (mineralized material). F-IPCC system has its best application in deep, pre-existing pits, with low vertical advance rates, where a single crusher location can service the operation for an extended period.
- 2.
- Semi-Fixed In-pit Crushing and Conveying systems (SF-IPCC)
In SF-IPCC systems, the crusher is fixed at a strategic junction point in the pit stage for a certain period (usually 3 to 5 years). Truck haulage is also used within the pit to move material between the working face and the crushing unit, just like with F-IPCC. The differences are: SF-IPCC is designed to decrease the haulage distance to the crusher much more than F-IPCC, and in order to relocate SF-IPCC, the entire crusher station must be disassembled into multiple parts or modules.
- 3.
- Semi-Mobile In-pit Crushing and Conveying systems (SM-IPCC)
SM-IPCC is designed with a modular architecture to allow for the periodic movement of the crusher every 6 to 18 months as the working face deepens, where the crusher is operating near the mine working face (Figure 6). As the mine matures and increases in depth, the crusher is relocated deeper into the pit approximately every two to five benches (depending on the vertical advance rate) to maintain a short transport distance for the truck portion. Trucks feed crushing units, and dozers can directly push materials to feed crushers with a considerable cost reduction. Due to the continuous usage of trucks and the possibility of deploying the crusher at appropriate locations, SM-IPCC systems are the most easily accessible for current conventional hauling operations, which is also why SM-IPCC is the most flexible hauling system of all types of IPCC. Most importantly, by leveraging dozers or transport crawlers, the crusher can be relocated in hours without disassembling it, significantly reducing unproductive downtime.
- 4.
- Fully Mobile In-pit Crushing and Conveying systems (FM-IPCC)
This system is distinguished by the loading unit dumping straight into the hopper of a fully mobile crusher that follows it (Figure 7). Once crushed, the material is transported straight from the working face to its destination through a network of conveyors. Utilizing a comprehensive continuous mining system and eliminating the requirement for truck haulage during steady state operation can dramatically save operational expenditure. However, as FMIPCC’s flexibility is drastically constrained, the mine design must suit the system’s requirements. In the meantime, truck haulage may still be required during each sinking phase of a mine because FMIPCC needs to be capable of completing mining tasks in complex geological conditions.
5.1.2. IPCC Systems’ Characteristics
According to the literature review and mine site production experience, IPCC systems offer the following benefits compared to TS alternatives. The advantages of the IPCC are:
- 1.
- Operational expenditure
As a mine’s activity grows, the pit deepens and the size of the waste dumps increases, leading to a longer truck haul cycle and the need for more trucks to meet production requirements. Compared to IPCC methods, truck haulage is often thought to be more costly as distance and elevation increase [33]. With savings opportunities arising from energy saving, workforce reduction, weight efficiency and maintenance, it is possible to significantly reduce material transport operating expenses (OPEX) by using an IPCC system compared to a truck haulage system. When other unit operations are considered, such as drilling, blasting, loading and ancillary services, estimates prepared at the University of Queensland put total mining costs at around 24% less in comparison to equivalent TS operations [14].
- 2.
- CO2 emissions
IPCC systems are capable of a substantial reduction in CO2 emissions because of fuel switching. An iron ore mine in Brazil with two installed FM-IPCC systems with a combined capacity of 7800 t/h, resulting in an expected decrease in diesel use of 60 million litres per year (ML/a), is an example of IPCC practice [11]. Reduced diesel consumption directly translates into reduced CO2 emissions on site. In the same Brazilian mine, diesel savings of 60 ML/a equate to an approximate reduction of 130,000 t/a of CO2. Considering that the average passenger vehicle emits approximately 3.552 t of CO2 equivalent per year (Commonwealth of Australia, 2012), this is equivalent to taking more than 36,000 cars off the road per year [14]. The IPCC study [16] shows that when only fossil fuel-based energy was used, the CO2 emissions per tonne of ore for the IPCC system were 67 kg CO2 e/t as opposed to the TS system’s 70 kg CO2 e/t, a 3 kg decrease. It is possible to reduce greenhouse gas emissions by 14 kg CO2 e/t ore using power generated from natural gas [17]. With renewable energy, e.g., solar-based and wind-based electricity, IPCC can be regarded as a decarbonization transport mining system.
- 3.
- Energy saving
Conveyor haulage naturally uses less energy per unit weight of material transported than truck haulage. Another important aspect is that conveyors use more (81%) of the consumed energy for the transportation of the payload in comparison to trucks (39%) [11]. More precisely, during a truck cycle, only 39% of the energy is used to move the payload; the other 61% is needed to move the truck’s weight. Because the conveyor’s upper and lower portions weigh much less than the overall amount of material for each metre of its length, just 19% of the energy used to move the material is wasted [17,39]. On the other hand, IPCC can reduce a mine’s dependency on diesel fuel due to electricity-based [40].
- 4.
- Production efficiency
For the purpose of moving ore or waste to the appropriate areas, IPCC offers a continuous transportation system method, which typically improves production rates [36]. Conveyor haulage provides superior production efficiency on comprehensive metrics of assessing equipment performance, according to a comparison of the two systems (TS/IPCC) based on utilized time, operating time, and valuable operating time metrics [33]. While the truck fleet enables much higher available time and utilization time, IPCC achieves higher operating time and valuable operating time, which means higher production efficiency compared to the truck fleet [33].
- 5.
- Environmental footprint (noise and dust)
Since conveyors operate at a lower decibel level than conventional diesel-powered trucks, IPCC systems may help minimize noise pollution. Reducing the number of trucks on the road may significantly reduce the source of dust emissions, while some water will still be needed in conveyor systems to suppress dust at transfer points [11]. In other words, IPCC creates a better mining environment for the workforce from both noise and dust perspectives.
- 6.
- Maintenance
IPCC usage decreases reliance on large off-highway tyres, which account for a large portion of the truck fleet cost. Large off-highway tyre shortages will significantly impact truck fleet availability and mining production rate. In addition to reducing haul truck numbers, conveyors have been reported to reduce the need for ancillary equipment (graders, dozers and water trucks) by 25–30% [11].
- 7.
- Workforce reduction
IPCC offers more opportunities to remote open pit mines with limited labour availability and high workforce cost, in some cases, as low as one operator for each major component (crusher, conveyor, spreader/stacker), with minimal maintenance staff [24]. For example, a FM-IPCC system has a total workforce requirement of around 80 people [37], including operators and maintenance personnel. The exact staffing numbers will depend on the number and installed length of conveyors. In comparison, it is estimated that a large ultra-class mining truck requires staffing of 7 people per year. Thus, from a workforce point of view, an IPCC system becomes an attractive alternative if it can replace approximately 12 trucks [14].
- 8.
- Safety
Abbaspour [29] demonstrated that these transportation systems behave differently in terms of safety and social metrics by creating a simulation model over the whole mine life, including TS and four types of IPCC systems. In conclusion, FM-IPCC stood first in terms of safety, while the TS system was ranked fifth. A reduced truck fleet size will reduce the possibility of vehicle collisions, which is a leading cause of safety incidents in surface mining operations [14]. Because TS systems work in collaboration to feed fixed, semi-fixed and semi-mobile IPCC systems [18], FM-IPCC is able to arrive at the lowest safety risk indicator by eliminating the truck fleet.
- 9.
- Total cost operation over the mine life
In 2012, the typical capital expenditure for an IPCC system was between USD180 million and USD250 million (depending on the types of IPCC, the number was estimated to be and installed length of conveyors) [41]. For a 360-ton haul truck, the cost in 2009 was around USD5 million [42]. It can be seen from Figure 9 that IPCC requires more significant capital investment. The considerable gap causes plenty of greenfield project mines to embrace the TS system when they hope to recover capital as quickly as possible. However, the IPCC’s accessories, such as the crusher and conveyor, are generally replaced every 20 to 25 years (about 150,000 h), whereas the economic replacement age for trucks is around seven to ten years of operation (between 45,000 and 60,000 h). This indicates that two truck fleet replacements will be required for a mining project that is 25 years old (i.e., where the red line drops in Figure 8). The conveyor system will require a lower total cost operation over the mine life [17]. It is estimated that the operating expenses (OPEX) of conveyor haulage are around one-third that of a comparable TS system. However, when capital expenditure (CAPEX) is considered, the reduction in the total cost of operation over the mine life is around 50 per cent [14].
In the meantime, there are several disadvantages to IPCC versus TS:
- 1.
- Flexibility
Its flexibility is the most significant factor that hinders the commercial take-up of IPCC systems when a mine considers an available mining system. Of the four types of IPCC systems, SM-IPCC shows the best flexibility, while FM-IPCC is the worst. Mine design, relocation and capability are limiting IPCC application.
- (a)
- Mine design limitation. The decision-makers must cater to the installation requirements of the IPCC systems when they design the mine layout. Take FM-IPCC as an example, the optimization of ultimate pit limit (UPL), considering the geometric constraints connected with the installation of FM-IPCC systems, is one study field that requires substantial further investigation [11]. Throughout each sinking phase of a mine, truck haulage may still be required, but the distance of the haul may be decreased by deploying and scheduling the trucks to dump into the fully mobile crusher close to the mining activity [14].
- (b)
- Relocation limitations. The IPCC has its specific extraction sequence. It is crucial to design its optimal location and relocation strategy to minimize operating costs. Mine designers need to trade-off large bench widths against production for an optimal location and relocation strategy [37]. For instance, because FM-IPCC systems are better suited to flat or gently dipping applications such as coal overburden or iron ore mining, it reduces the ability of a mine to switch mining to a different zone to adapt to unforeseen changes in market conditions or geology [14].
- (c)
- Capacity limitations. Compared with the TS system, IPCC systems cannot be scaled up or down as mining requirements change [38]. This is because IPCC’s major components (crusher, conveyor, spreader/stacker) have their own capacity limitations. An IPCC system also has a rated capacity, which reduces the ability to scale mining rates up or down according to market conditions.
- 2.
- Reliability
As IPCC systems are a series of connected systems, an unplanned delay or maintenance outage in one piece of equipment will affect the throughput of the entire system [14]. The availability of the whole IPCC system depends not only on the availability of the crusher but on the availability of each of the conveyors that comprise the whole system; the more components there are, the lower the reliability of IPCC systems [24].
- 3.
- Material requirements
The material requirements of IPCC transportation focus on material size and material properties. In order to transport material via conveyor, particle size distribution should be such that the largest material does not exceed approximately one-third of the belt width [14]. On the material properties side, the ability to sustain high throughput rates (4000–10,000 t/h) through a mobile crusher is key to IPCC system performance. Comprehensive knowledge of the material characteristics of the deposit and waste rock is required to specify the correct crusher type [14].
- 4.
- Contractual constraints
IPCC systems are not available as off-the-shelf solutions. The current approach for acquiring IPCC systems is via engineering, procurement, construction and management contract, which adds cost and delay to a mining project. This procedure will likely change once IPCC technology matures and gains greater acceptance [14].
Overall, the comparison results indicated that the IPCC system is superior for mining activities requiring strict environmental management, long lifespan, high production rate, and long-haul distances [17]. Generally speaking, the use of an IPCC continuous mining system will lower the energy consumption and significant emissions in the haulage sector of a mine, as well as reduce the cost of the haulage mine sector as a whole by millions of dollars, which will ultimately boost the mining sustainability and economy [13].
5.2. Trolley Assist Systems
5.2.1. Theory of Trolley Assist
After the oil supply crisis in the mid-1970s, the surface mining industry turned its attention to this fuel-saving technology. Several surface mines equipped with large off-highway electric trucks considered introducing TA into their operations. The overall view of the TA system is shown in Figure 9. As a solution that is a practical first step on the path to low-emission mine sites, TA is a proven technology capable of providing external electrical power to diesel-electric equipment. Recent advances in electric control technology have made this type of haulage an attractive alternative to conventional diesel-electric haulage [43].
The objective of mine decision-makers is to transport the highest volume of payload per hour while minimizing operating costs over one haul cycle of the trucks within acceptable risk boundaries [44]. Therefore, the power supply module which produces power from a diesel engine may be integrated with overhead trolley electricity to achieve further fuel savings [45,46]. The TA system is the most cost-effective on the ramps, where the majority of the total energy is used [44].
As Figure 10 shows, after operators manoeuvre diesel-electric trucks leaving the workface to arrive at the trolley ramp, operators determine the most appropriate time and approach speed to enter trolley mode to raise the pantograph. The truck switches to trolley electricity when the pantograph is activated and connected to the overhead power lines. Additionally, the truck’s diesel engine enters idle mode, significantly saving fuel energy and reducing CO2 emissions [45]. Because the electric wheel motor power commonly exceeds engine power, the electric wheel motors’ full power capacity can achieve accelerating speed in trolley mode [47]. From a power aspect, with pantographs, diesel-electric hauling trucks could draw power from an overhead trolley line. However, diesel-electric power is still required in the pit, surrounding the loader/crusher, during hauling level segments, and on return travel [44].
5.2.2. Configuration of Trolley Assist
Trolley Assist systems supplement the power requirements of diesel-electric haul trucks via an external power source. Diesel-electric haul trucks are powered by a diesel engine generating an Alternative Current (AC) that powers the rear wheel motors to deliver torque to the wheels. Under Trolley Assist, the wheel motors are powered by an external Direct Current (DC) power source, commonly an overhead power distribution system. TA systems consist of three subsystems: power supply to the pit, overhead power distribution, and trucks with TA capability (Figure 11) [48].
- 1.
- Power Supply to the Pit
Transmission lines from a utility source deliver AC power to strategically positioned rectifier substations, providing DC power to the trolley line along the haul road. Rectifier substations should be skid-mounted for mobility to accommodate changes in the haul route [48]. The rectifier substations deliver power to the overhead power distribution system along the haul route.
- 2.
- Overhead Power Distribution
Overhead power distribution is achieved by a catenary system that supplies electrical power along the haul road. The catenary system allows the trucks to drive underneath and connect to the DC power. The voltage supplied by the catenary system depends on the wheel motors in the trucks using TA [49]. The catenary system is supported by poles spaced approximately 20–30 m along the haul road. The supporting poles’ actual design and spacing depend on the haul road characteristics.
- 3.
- Trucks with Trolley Assist Capability
Figure 12 illustrates a truck operating under TA. The truck conversion was required in trolley mode when Trolley Assist systems were implemented, which in some cases required rewiring the wheel motor circuit to operate in series during TA. A pantograph system was required to connect the truck’s electrical circuit to the overhead power, which operators determine the most appropriate times to raise or lower.
5.2.3. Advantages and Disadvantages of Trolley Assist System
In each of the TA applications, there was widespread publicity of various benefits resulting from the conversion to TA. The performance estimates of the TA system were derived from an analysis of several South African fleets that had used the technology in the past [48]. According to available reports and mine site production experience, TA systems offer the following benefits compared to TS alternatives. The advantages of TA are:
- 1.
- Reduced Emissions
The most crucial advantage is significantly reducing truck fleet CO2 emissions [49]. According to ABB statistics, a single mining truck emits around 1000 tons of CO2 per year [28]. Trolley Assist systems are most effective on the ramps, where most diesel energy is consumed, and the emissions are emitted.
- 2.
- Reduced diesel fuel consumption
A substantial saving in diesel fuel is made possible on the ramp with the use of a TA. According to a study case, the usage of TA decreases diesel consumption for ramp haulage by 19 litres per kilometre per truck [50]. The value of the resulting savings depends on the relative pricing of diesel fuel versus electricity. Indeed, relatively inexpensive electricity is more popular than diesel, and fossil fuel prices have continued to rise in the past few years. On the other hand, it is interesting to note that the several mines converted to TA systems are located in southern Africa, where the region faced the most severe oil supply problems during the 1970s. Reduced diesel fuel consumption can relieve the pressure on remote mines with oil supply problems [51].
- 3.
- Productivity improvements
Electric motors also offer more torque at low speeds than traditional combustion engines [52], which means electrified trucks are able to accelerate faster and provide better speed performance on a ramp [49]. Due to the trucks’ higher gradient capability while operating under grid power, the TA system makes it simpler to access the deeper portions of the mine as mining depth increases. The use of TA on uphill hauls usually increases haulage system productivity. The report shows the resulting benefits are truck speed increases on a ramp from 13 km/h to 27 km/h [48]. The overall increase in truck productivity depends on the relative length and road grade of the uphill ramps in the haul cycle, and this productivity increase favours the use of TA for long uphill hauls.
- 4.
- Increase engine and wheel motor life
All the mines with TA systems have reported a substantial increase in engine and wheel motor life cycles and running time. Increased speed on ramps results in shorter times during which the wheel motors are at the full load; thus, motor overheating is less likely to occur. With the same motors, longer ramps may be negotiated without undue wheel motor wear, thus improving the haulage system for deep pit capacity.
- 5.
- Reduced fleet size
In a TA system, a single truck can complete one cycle in a shorter time due to its higher speed, which means the TA fleet can transport the higher possible payload per hour. Therefore, reducing the number of required trucks is likely to achieve production requirements. Fewer trucks lead to reduced maintenance and workforce costs, plus reduced capital expenditure.
- 6.
- Lower maintenance cost
Under TA haulage, a truck’s diesel engine idling reduces the duty on the engine and increases the engine life. From a single truck perspective, trolley trucks need less maintenance than conventional diesel trucks because of reduced truck engine maintenance and fewer overhauls. On the downside, it is considered that the savings would be offset by the increased cost of electric wheel maintenance and trolley system maintenance [50].
- 7.
- Lower overall operating cost
Due to infrastructure and truck retrofit costs, although the TA system requires high upfront capital expenditure, the overall operating cost can be lower than conventional diesel trucks because TA is capable of reducing emissions (depending on carbon tax policy), energy consumption, the number of trucks, and maintenance costs.
In the meantime, there are several disadvantages to TA versus T:
- 1.
- High upfront capital outlay
The TA system is more complex than the conventional TS system with respect to the infrastructure of power supply to the pit, overhead power distribution, and the retrofit of trucks with TA capability, which means a high upfront capital outlay. According to research, the infrastructure cost per truck for adaptive measures and TA systems, which need an overhead cable, is around 75% of the overall truck price [53].
- 2.
- Mine design and planning restriction
The most significant advantages of off-highway haulage are its flexibility to mine schedule and ease of adjustment to a specific feature of the mined deposit. The installation of a TA system has imposed several restrictions on the flexibility of mine design and planning. While the trolley lines can be relocated, the relocation requires a skilled workforce, specialized equipment, and time. Time lost during critical stages of mining operations may have severe financial consequences. The cost and restrictions associated with the trolley shifting operation are likely to discourage frequent haul road relocations and restrict traffic patterns. Trolley shifting is another challenge in trolley ramp structural design, which affects trolley system performance. While not all the restrictions may apply to each mining situation, the associated costs for those that do apply should be evaluated and accounted for. More importantly, the TA system still preserves the majority of benefits in flexibility by using diesel-electric trucks. Although TA system flexibility is less than the conventional TS system, it is higher than IPCC systems.
- 3.
- Trolley Assist system maintenance
The reported experience with the existing TA system indicates that the distance between the trolley wire and the haul road surface must be closely controlled [54]. The need to maintain smooth haul routes and tight tolerances between the haul road surface and overhead lines is currently experienced with trucks operating under a TA system where wheel path wander is minimal due to the requirement to position the pantograph under the power lines. In this case, more ancillary equipment is necessary to maintain road quality. In addition, the maintenance costs include infrastructure maintenance and inventory of related spare parts and materials.
- 4.
- System capacity
The trolley sections have a limited capacity and are only able to accommodate a given number of trucks due to grid power limitations. When this number is on the section, the next truck cannot be accepted, and it must wait or travel powered by its diesel engine. Furthermore, slow-moving equipment, such as water trucks and graders, may slow the Trolley Assisted truck down. Truck schedules need to balance production tasks and maintenance requirements while considering TA technology’s capacity. Bunching of trucks frequently occurs in TA operations, resulting in potential productivity loss. Therefore, considering system capacity limitations, the TA fleet needs a more effective dispatch strategy.
- 5.
- Access to Electricity
Installation of a TA system will require additional electrical power capacity. The TA system becomes an option for mine sites that can increase their electrical power capacity (i.e., readily available power or excess capacity). The adoption of the truck haulage system outside South Africa indicates that TA may be economically feasible in situations without very high diesel-to-electricity cost ratios. For remote mines, renewable energy sources, such as wind turbines and solar PV, may be used as alternatives to fulfil the electrical power requirement of the TA system, which will be driven by decarbonization.
- 6.
- Operator requirement
Operator training is essential to the truck haulage system because operators determine the most appropriate times to raise or lower the pantograph. The higher truck speeds combined with narrower steer paths demand more excellent skill and concentration from an operator. Greater awareness of the truck’s dimensions is required to avoid collision with the catenary system supporting poles. If the truck loses contact with the trolley wire on the ramp due to erroneous driving, it will cause a severe bunching phenomenon because of lower speed and loss of potential productivity.
In most cases, a permanent, long-haul route with TA on the ramp out of the pit will result in the best economic benefit for Trolley Assist. The TA system’s economic feasibility depends on several factors, including the availability of alternative electricity, diesel fuel and electricity costs, the cost of employing operators, and resulting maintenance requirements.
5.3. Battery Trolley Systems
5.3.1. Theory of Battery Trolley
The mining industry is working on a series of projects to achieve zero-emissions fleet requirements. Battery Trolley deployment is one such option [4,46]. Battery Trolley aims to offer a haulage mining system using the full source of electrical power as a decarbonization technology through autonomous high-intensity battery-electric trucks, TA systems and energy recovery systems.
5.3.2. Technology Uptake
It is advanced technology development that gives BT a chance to be a reality. Battery-electric power, autonomous deployment, TA and energy recovery technologies are the critical drivers for the BT to achieve the decarbonization pathway, which are core components in the future plans for deeper phases [31].
- 1.
- Battery-electric power technology
Electromobility, defined as the development and usage of electric-powered vehicles, is an industry-wide technical trend [31]. BEVs are one of the choices available to accomplish ambitious decarbonization goals. New battery designs with superior usage performance and lower cost will boost BEVs’ competitiveness in the mining sector. Battery electric trucks have fewer mechanical systems and control logic than conventional hybrid ones, which results in reduced failure rates and more straightforward maintenance [45]. Nevertheless, battery size, energy density, battery swapping and charging, battery health and management are challenges facing the mining sector when thinking about applying battery-powered trucks.
- 2.
- Autonomous technology
According to statistics collected by GlobalData, by May 2022, there were 1068 autonomous haul trucks operating worldwide, a 39% yearly growth. Caterpillar and Komatsu supply 86.5% of the trucks monitored by the Mining Intelligence Centre, with the 793F and 930E being the two OEMs’ most popular models, respectively [55]. That is because autonomous solutions can improve safety, equipment availability, and overall productivity on any mine site without machine operators sitting in the cab. As for the BT, determining the most appropriate times by leveraging autonomous technology to raise or lower the pantograph is the best option. BT systems are capable of taking advantage of autonomous trucks from both safety and productivity perspectives.
- 3.
- Trolley Assist technology
Battery electric vehicles are one option for mining trucks. However, in order to overcome battery size and energy density defects, mining trucks need TA technology to provide ascending energy on an uphill where the most energy is consumed. TA technology makes BT available by offering electric power to battery trucks, which enables battery trucks to haul for a long time.
- 4.
- Energy recovery system
The BT is able to leverage an energy recovery system to recuperate braking energy, which is used to charge the onboard battery when returning downhill [47]. The depth alterations connected with mining development bring significant variations in haul cycles and recoverable potential energy per cycle [56].
5.3.3. Battery Trolley Advantages and Disadvantages
Battery Trolley makes it possible to achieve the first zero-emissions truck fleet as a green solution, which is available to remove the reliance on fossil fuels by using battery-electric power in mining haulage systems. Except for decarbonization, reducing energy costs and TA’s advantages, the BT can achieve lower maintenance costs for a single truck without a diesel engine. Additionally, from the overall mine operating life, the operating costs of BT are less than the conventional diesel truck fleet because of using electricity as end-use energy, which is similar to IPCC.
In spite of the advantages associated with BT, decision-makers may be reluctant to use it for some reasons. From diesel-electric to battery-electric power, this transition would significantly increase the mine’s electricity cost and demand, as well as the power infrastructure and station capital expenditure. Additionally, the battery truck fleet has to face many challenges, such as battery size and performance, high upfront capital outlay, feasibility, availability, capability, truck fleet dispatching, mine design restrictions, and ancillary equipment maintenance schedule arrangement.
5.3.4. Battery Trolley Systems Configurations
Like IPCC systems, there are three possible configurations for BT. Each type has its pros and cons, which can be used in unique mining situations.
- 1.
- Dynamic charging BT configuration
Dynamic charging technology enables the ability for grid power to be used to power the electric drive motors and charge the onboard vehicle battery simultaneously. The dynamic charging BT consists of the battery-electric truck, the TA systems and dynamic charging technology.
Figure 13 and Figure 14 are, respectively, the dynamic charging BT systems operational process and power source. Battery-electric trucks load and haul with battery power, switching to trolley mode after arriving at the trolley ramp. The battery consumes energy at a much lower rate for cooling and idling. At the same time, the grid power is simultaneously used to charge the on-board battery and provide the wheel motors output power on the trolley ramp. When the battery-electric truck comes onto an ex-pit flat road, it returns to battery power mode to complete hauling, queueing, dumping and returning manoeuvres. The battery-electric truck then enters energy recovery mode on the downhill ramp. The energy recovery system transforms truck braking power into electric energy that can be stored on the battery. The battery-electric truck then reuses battery power to return to the loading point.
- 2.
- Stationary charging BT configuration
In stationary charging method, a battery station is necessary for battery charging/swapping. As for choosing charging method or swapping method, it depends on charging C-rate and swapping time. The location of battery station is selected on the crest of pit for providing enough permanent room to build infrastructure and park trucks. The stationary charging Battery Trolley consists of the battery-electric truck, the TA systems and battery station.
Figure 15 and Figure 16 are, respectively the stationary charging BT systems operational process and power source. Battery-electric trucks load and haul with battery power, switching to trolley mode after arriving at the trolley ramp. The battery consumes energy at a much lower rate for cooling and idling. At the same time, the grid power is capable of providing the max wheel motors output power to operate in a faster speed on the trolley ramp. When the battery-electric truck comes onto an ex-pit flat road, it returns to battery power mode to complete hauling, queueing, dumping and returning manoeuvres. According to on-board battery size design and energy consumption, the battery-electric truck needs to charging/swapping battery within each cycle or every two/three cycles. The battery-electric truck then enters energy recovery mode on the downhill ramp. The energy recovery system transforms truck braking power into electric energy that can be stored on the battery. The battery-electric truck then reuses battery power to return to the loading point.
- 3.
- Dual trolley BT configuration
Research shows that for downhill hauls, a bidirectional substation enables energy feedback to the grid [44]. It is reasonable to install a dual trolley system for better energy capture performance in a BT system: the uphill ramp trolley enables the ability for grid power to be used to power the electric drive motors while the downhill ramp trolley captures braking energy and returns it to the grid. The dual trolley BT consists of battery-electric trucks and a double trolley system.
Figure 17 and Figure 18 are, respectively, the dual trolley BT systems operational process and power source. Battery-electric trucks load and haul with battery power, switching to trolley mode after arriving at the trolley ramp. The battery consumes energy at a much lower rate for cooling and idling. At the same time, the grid power is capable of providing the max wheel motors output power to operate in a faster speed on the trolley ramp. When the battery-electric truck comes onto an ex-pit flat road, it returns to battery power mode to complete hauling, queueing and dumping manoeuvres. According to on-board battery size design and energy consumption, the battery-electric truck needs to charging/swapping battery within each cycle or every two/three cycles. The battery-electric truck needs to charging/swapping batteries on returning travel when it passes a battery station located on the pit’s crest. The battery-electric truck then enters energy recovery mode downhill by engaging the trolley line, which captures braking energy back to the grid. The battery-electric truck then reuses battery power to return to the loading point.
6. Discussions
In order to achieve optimum make-decision in mining haulage systems, it is necessary to use the mining system analysis method for evaluating each mining system parameter in Table 2.
According to Table 2, diesel TS shows the best performances in flexibility, CAPEX, refuelling, reliability, scalability, and capability, which explains why classic TS are prevalent in all kinds of greenfield and brownfield mining projects. IPCC is capable of mitigating the TS disadvantages from energy efficiency, maintenance, refuelling, emissions, heat generation, and environmental footprint points. However, flexibility, CAPEX, reliability, scalability, and capability characteristics are the constraints for IPCC, especially FM-IPCC, to large-scale applications in mine sites. Due to diesel-electric power and trolley limitations, TA shows medium performance in almost all parameters. In the dynamic charging alternative, because the onboard battery energy source is from grid charging uphill and energy capture downhill, the battery-electric trucks cannot complete one haul cycle without enough trolley lines charging. Therefore, dynamic charging BT has lower flexibility, reliability, scalability and capability compared with stationary charging BT, while no recharging/swapping battery need in the battery station is the most significant merit for dynamic charging BT systems. Because of flexibility limitations and considerable capital outlays, dual trolley BT is unlikely to be popular in large-scale BT deployment. However, dual trolley BT is suitable for some unique mine site conditions like super-depth copper mines.
7. Conclusions
The mining industry is now at a crossroads with surface mining fleets as it works to meet interim reduced emissions and final net-zero targets. A big part of that is moving away from diesel to electricity alternatives. This paper depicts the various haulage systems from diesel-based power trucks to electric-based power IPCC, diesel-electric power TA systems and battery-electric power BT systems. IPCC and TA are ramping up due to reasonable economic and emission reduction, whilst trucks operating in conjunction with a conceptual BT system could decarbonise haulage mining systems in open pit mines. All these haulage systems are interrelated and complementary. They cannot be determined in isolation, which requires further comparison and analysis of their mine sites’ practice performance, whereby all advantages and disadvantages are considered simultaneously. Large open pit mines may require a combination of different systems, e.g., SM-IPCC and BT systems, to achieve the decarbonization haulage system.
Data Availability Statement
Not Applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| TS | Truck-Shovel |
| IPCC | In-pit Crushing and Conveying |
| TA | Trolley Assist |
| BT | Battery Trolley |
| ERSs | Energy Recovery Systems |
| CAPEX | Capital Expenditures |
| OPEX | Operating Expenses |
| STEPS | Stated Policies Scenario |
| APC | Announced Pledges Case |
| SDS | Sustainable Development Scenario |
| NZE | Net Zero Emissions |
| IEA | International Energy Agency |
| GHG | Greenhouse Gas |
| PV | Photovoltaic |
| NEM | National Electricity Market |
| TGP | Terminal Gate Price |
| DPM | Diesel Particulate Matter |
| AHTs | Autonomous Haulage Trucks |
| FIPCC | Fixed In-pit Crushing and Conveying |
| SFIPCC | Semi-Fixed In-pit Crushing and Conveying |
| SMIPCC | Semi-Mobile In-pit Crushing and Conveying |
| FMIPCC | Fully Mobile In-pit Crushing and Conveying |
| UPL | Ultimate Pit Limit |
| AC | Alternative Current |
| DC | Direct Current |
| BEVs | Battery-electric vehicles |
References
- Plazas-Niño, F.A.; Ortiz-Pimiento, N.R.; Montes-Páez, E.G. National energy system optimization modelling for decarbonization pathways analysis: A systematic literature review. Renew. Sustain. Energy Rev. 2022, 162, 112406. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Net Zero by 2050—A Roadmap for the Global Energy Sector. Available online: https://iea.blob.core.windows.net/assets/deebef5d-0c34-4539-9d0c%2010b13d840027/NetZeroby2050ARoadmapfortheGlobalEnergySector_CORR.pdf (accessed on 1 November 2022).
- International Energy Agency (IEA). World Energy Outlook. 2021. Available online: https://www.iea.org/reports/world-energy-outlook-2021 (accessed on 1 November 2022).
- Zuliani, J.E.; Guilbaud, J.; Carreau, M. Decarbonization of remote mine electricity supply and vehicle fleets. CIM J. 2021, 12, 135–148. [Google Scholar] [CrossRef]
- Department of Industry, Science, Energy and Resources. Australia’s Emissions Projections. 2020. Available online: https://www.industry.gov.au/data-and-publications/australias-emissions%20projections-2020 (accessed on 1 November 2022).
- Vatalis, K.I.; Avlogiaris, G.; Tsalis, T.A. Just transition pathways of energy decarbonization under the global environmental changes. J. Environ. Manag. 2022, 309, 114713. [Google Scholar] [CrossRef] [PubMed]
- Burke, P.J.; Beck, F.J.; Aisbett, E.; Baldwin, K.G.; Stocks, M.; Pye, J.; Venkataraman, M.; Hunt, J.; Bai, X. Contributing to regional decarbonization: Australia’s potential to supply zero-carbon commodities to the Asia-Pacific. Energy 2022, 248, 123563. [Google Scholar] [CrossRef]
- Australian Renewable Energy Agency. Renewable Energy in the Australian Mining Sector White Paper. Available online: https://arena.gov.au/assets/2017/11/renewable-energy-in-the-australian-mining-sector.pdf (accessed on 1 November 2022).
- Department of Industry, Science, Energy and Resources. Australian Energy Update. 2021. Available online: https://www.energy.gov.au/publications/australian-energy-update-2021 (accessed on 1 November 2022).
- Parra, A.; Morales, N. Qualitative Review of Alternative Transport Systems for Open Pit Mines. Available online: https://delphoslab.cl/Publicaciones/2016/PM2_M2016.pdf (accessed on 1 November 2022).
- Nehring, M.; Knights, P.F.; Kizil, M.S.; Hay, E. A comparison of strategic mine planning approaches for in-pit crushing and conveying, and truck/shovel systems. Int. J. Min. Sci. Technol. 2018, 28, 205–214. [Google Scholar] [CrossRef]
- Calvo, G.; Mudd, G.; Valero, A.; Valero, A. Decreasing ore grades in global metallic mining: A theoretical issue or a global reality? Resources 2016, 5, 36. [Google Scholar] [CrossRef] [Green Version]
- Purhamadani, E.; Bagherpour, R.; Tudeshki, H. Energy consumption in open-pit mining operations relying on reduced energy consumption for haulage using in-pit crusher systems. J. Clean. Prod. 2021, 291, 125228. [Google Scholar] [CrossRef]
- Dean, M.; Knights, P.; Kizil, M.S.; Nehring, M. Selection and planning of fully mobile in-pit crusher and conveyor systems for deep open pit metalliferous applications. In Proceedings of the Third International Future Mining Conference, Sydney, Australia, 4–6 November 2015; pp. 219–225. [Google Scholar]
- Igogo, T.; Awuah-Offei, K.; Newman, A.; Lowder, T.; Engel-Cox, J. Integrating renewable energy into mining operations: Opportunities, challenges, and enabling approaches. Appl. Energy 2021, 300, 117375. [Google Scholar] [CrossRef]
- Lezak, S.; Cannon, C.; Blank, K. Low-Carbon Metals for a Low-Carbon World: A New Energy Paradigm for Mines; Rocky Mountain Institute: Basalt, CO, USA, 2019. [Google Scholar]
- Osanloo, M.; Paricheh, M. In-pit crushing and conveying technology in open-pit mining operations: A literature review and research agenda. Int. J. Min. Reclam. Environ. 2020, 34, 430–457. [Google Scholar] [CrossRef]
- Soofastaei, A.; Karimpour, E.; Knights, P.; Kizil, M. Energy-Efficient Loading and Hauling Operations. In Energy Efficiency in the Minerals Industry. Green Energy and Technology; Awuah-Offei, K., Ed.; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Aguayo, I.A.O.; Nehring, M.; Ullah, W. Simulating the productivity improvements of incorporating a surge loader into the open pit loading and haulage system. Int. J. Min. Reclam. Environ. 2022, 36, 1–18. [Google Scholar] [CrossRef]
- Bao, H.; Zhang, R. Study on optimization of coal truck flow in open-pit mine. Adv. Civ. Eng. 2020, 2020, 8848140. [Google Scholar] [CrossRef]
- Bakhtavar, E.; Mahmoudi, H. Development of a scenario-based robust model for the optimal truck-shovel allocation in open-pit mining. Comput. Oper. Res. 2020, 115, 104539. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, R.; Lv, S.; Wang, Y. Open-pit mine truck fuel consumption pattern and application based on multi-dimensional features and XGBoost. Sustain. Energy Technol. Assess. 2021, 43, 100977. [Google Scholar] [CrossRef]
- De Lemo Pires, D. Surface mining technology: Managing the paradigm shift. Min. Eng. 2013, 6, 36–41. [Google Scholar]
- Hay, E.; Nehring, M.; Knights, P.; Kizil, M. Ultimate pit limit determination for semi mobile in-pit crushing and conveying system: A case study. Int. J. Min. Reclam. Environ. 2020, 34, 498–518. [Google Scholar] [CrossRef]
- Moniri-Morad, A.; Pourgol-Mohammad, M.; Aghababaei, H.; Sattarvand, J. A methodology for truck allocation problems considering dynamic circumstances in open pit mines, case study of the sungun copper mine. Rud.-Geološko-Naft. Zb. 2019, 34, 4. [Google Scholar] [CrossRef]
- Kumral, M.; Sari, Y.A. An application of possibilistic programming to production sequencing of mining parcels. Int. J. Manag. Sci. Eng. Manag. 2017, 12, 79–88. [Google Scholar] [CrossRef]
- Abbaspour, H.; Drebenstedt, C. Environmental Comparison of Different Transportation Systems—Truck-Shovel and IPCCs—In Open-Pit Mines by System Dynamic Modeling. In Proceedings of the 27th International Symposium on Mine Planning and Equipment Selection—MPES 2018; Widzyk-Capehart, E., Hekmat, A., Singhal, R., Eds.; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- ABB-ABB Ability™eMine. For Your World, and Mine. In Proceedings of the Electric Mine Conference, Stockholm, Sweden, 14–17 September 2022.
- Abbaspour, H.; Drebenstedt, C.; Dindarloo, S.R. Evaluation of safety and social indexes in the selection of transportation system alternatives (Truck-Shovel and IPCCs) in open pit mines. Saf. Sci. 2018, 108, 1–12. [Google Scholar] [CrossRef]
- Bozorgebrahimi, E. The Evaluation of Haulage Truck Size Effects on Open Pit Mining. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2004. [Google Scholar]
- Sánchez, F.; Hartlieb, P. Innovation in the mining industry: Technological trends and a case study of the challenges of disruptive innovation. Mining. Metall. Explor. 2020, 37, 1385–1399. [Google Scholar] [CrossRef]
- Bellamy, D.; Pravica, L. Assessing the impact of driverless haul trucks in Australian surface mining. Resour. Policy 2011, 36, 149–158. [Google Scholar] [CrossRef]
- Dzakpata, I.; Knights, P.; Kizil, M.S.; Nehring, M.; Aminossadati, S.M. Truck and shovel versus in-pit conveyor systems: A comparison of the valuable operating time. In Proceedings of the 16th Coal Operators’ Conference, Mining Engineering, University of Wollongong, Dubai, United Arab Emirates, 10–12 February 2016; pp. 463–476. [Google Scholar]
- Ritter, R.; Herzog, A.; Drebenstedt, C. Automated dozer concept aims to cut IPCC downtime. Eng. Min. J. 2014, 215, 52–55. [Google Scholar]
- Terezopoulos, N. Continuous haulage and in-pit crushing in surface mining. Min. Sci. Technol. 1988, 7, 253–263. [Google Scholar] [CrossRef]
- Abbaspour, H.; Drebenstedt, C.; Paricheh, M.; Ritter, R. Optimum location and relocation plan of semi-mobile in-pit crushing and conveying systems in open-pit mines by transportation problem. Int. J. Min. Reclam. Environ. 2019, 33, 297–317. [Google Scholar] [CrossRef]
- McCarthy, M.; Cenisio, B. Update on studies for implementation of IPCC at the Moatize coal project. In Proceedings of the IPCC 2013, Cologne, Germany, 25–26 June 2013. [Google Scholar]
- Czaplicki, J. Shovel-Truck Systems: Modelling, Analysis and Calculations; CRC Press/Balkema, Taylor and Francis Group: London, UK, 2009. [Google Scholar]
- McCarthy, B. Evaluating the lack of flexibility against the benefits of in-pit crushing and conveying. In Proceedings of the Optimizing Mine Operations Conference, Toronto, ON, Canada, 10–13 September 2013. [Google Scholar]
- Schroder, D.L. The use of in-pit crushing and conveying methods to significantly reduce transportation costs by truck. In Proceedings of the Coaltrans Asia Conference, Bali, Indonesia, 8–11 June 2003. [Google Scholar]
- Raaz, V.; Mentges, U. In-pit crushing and conveying with fully mobile crushing plants in regard to energy efficiency and CO2 reduction. In Proceedings of the IPCC 2011, Belo Horizonte, Brazil, 28 June 2011. [Google Scholar]
- Foley, M. In-pit crushing: Wave of the future. Aust. J. Min. 2012, 46–53. [Google Scholar]
- Lake, D.M.; Brzezniak, W. Trolley assist truck haulage cuts fuel and increases productivity. Part two. Aust. Coal Min. 1981, 3, 11, 13, 15–16. [Google Scholar]
- Mazumdar, J. Performance improvement of mining haul trucks operating on trolley systems. In Proceedings of the 2011 IEEE Industry Applications Society Annual Meeting, Orlando, FL, USA, 9–13 October 2011; pp. 1–6. [Google Scholar]
- Moore, P. Surface Mining Trucks. Int. Min. 2022, 17, 50–67. [Google Scholar]
- Gleeson, D. Battery and Electric. Int. Min. 2022, 17, 26–47. [Google Scholar]
- Engineering and Mining Journal. Freeport Taps Wärtsilä for 128-MW Plant for Grasberg: Engineering, Geology, Mineralogy, Metallurgy, Chemistry, etc.; Engineering and Mining Journal: Jacksonville, FL, USA, 2020; Volume 221, pp. 48–49. [Google Scholar]
- Crosson, C.C.; Sumner, H.B. Trolley assisted truck haulage. United States. Eng. Min. J. 1982, 183. Available online: https://www.osti.gov/biblio/6730531 (accessed on 30 December 2022).
- Morton, J. Truck Innovations Show Shape of Things to Come. Eng. Min. J. 2021, 222, 24–30. [Google Scholar]
- Freeman, S.; Golosinski, T.S. Economic feasibility of introducing trolly assisted haulage to an Australian open pit mine. Int. J. Surf. Min. Reclam. 1994, 8, 141–144. [Google Scholar] [CrossRef]
- Lake, D.M.; Brzezniak, W. Truck haulage using overhead electrical power to conserve diesel fuel and improve haulage economics. United Kingdom. Min. Technol. 1982, 64, 157–164. [Google Scholar]
- Marsden, O.W.; Marsden, J.O. Potential Pathways for Mining Operations to Transition to Renewable Energy—A Case Study. Min. Metall. Explor. 2021, 38, 1689–1699. [Google Scholar] [CrossRef]
- Ertugrul, N.; Kani, A.P.; Davies, M.; Sbarbaro, D.; Morán, L. Status of Mine Electrification and Future Potentials. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 151–156. [Google Scholar]
- Vorster, B.J. Trolley assist aids haulage at Iscor’s Shishen iron ore mine in South Africa. Min. Eng. 1986. [Google Scholar]
- Caterpillar, Products Services. Available online: https://www.cat.com/en_US/articles/customer-stories/mining/autonomous-haulage-making-mining-safer-and-more-productive-today.html (accessed on 1 November 2022).
- Terblanche, P.J. Technical and economic potential of energy recovery and re-use on board surface mining haul trucks. 2019. Available online: https://core.ac.uk/reader/200258120 (accessed on 1 November 2022).
Figure 1.
CO2 emissions in the World Energy Outlook—2021 scenario over time (Source: International Energy Agency (IEA). World Energy Outlook 2021) Note: STEPS = Stated Policies Scenario; APS = Announced Pledges Scenario; SDS = Sustainable Development Scenario; NZE = Net Zero Emissions by 2050 Scenario.
Figure 1.
CO2 emissions in the World Energy Outlook—2021 scenario over time (Source: International Energy Agency (IEA). World Energy Outlook 2021) Note: STEPS = Stated Policies Scenario; APS = Announced Pledges Scenario; SDS = Sustainable Development Scenario; NZE = Net Zero Emissions by 2050 Scenario.

Figure 2.
Australian stationary energy emissions, 1990 to 2030, Mt CO2-e (Source: Department of Industry, Science, Energy and Resources).
Figure 2.
Australian stationary energy emissions, 1990 to 2030, Mt CO2-e (Source: Department of Industry, Science, Energy and Resources).

Figure 3.
(a) Australian solar source map, (b) Australian wind source map. (Source: Australian Renewable Energy Agency; The Australian Government Bureau of Meteorology Average daily solar exposure dataset; the CSIRO DATA61 Mesoscale Wind Atlas Data dataset).
Figure 3.
(a) Australian solar source map, (b) Australian wind source map. (Source: Australian Renewable Energy Agency; The Australian Government Bureau of Meteorology Average daily solar exposure dataset; the CSIRO DATA61 Mesoscale Wind Atlas Data dataset).

Figure 4.
Historical Australia Diesel TGP Data (Source: AIP-Australian Institute of Petroleum).

Figure 5.
Conventional TS systems operating process.

Figure 6.
Semi-Mobile In-pit Crushing and Conveying systems (Source: Sandvik Mining and Construction).
Figure 6.
Semi-Mobile In-pit Crushing and Conveying systems (Source: Sandvik Mining and Construction).

Figure 7.
Full-Mobile In-pit Crushing and Conveying systems [38] (Source: McCarthy, 2013).
Figure 7.
Full-Mobile In-pit Crushing and Conveying systems [38] (Source: McCarthy, 2013).

Figure 8.
The cumulative net present value comparison of TS and IPCC systems [11].
Figure 8.
The cumulative net present value comparison of TS and IPCC systems [11].

Figure 9.
(a)The overall view of Trolley Assist system (source: ABB). (b) The detail of Trolley Assist on the ramp.
Figure 9.
(a)The overall view of Trolley Assist system (source: ABB). (b) The detail of Trolley Assist on the ramp.

Figure 10.
A schematic of a typical TA operation and power process.

Figure 11.
System design of TA.

Figure 12.
Truck with Trolley Assist capability operating on ramp (Source: ABB).

Figure 13.
A schematic of dynamic charging BT systems operational process.

Figure 14.
A schematic of dynamic charging BT systems power source.

Figure 15.
A schematic of stationary charging BT systems operational process.

Figure 16.
A schematic of a typical BT systems power source.

Figure 17.
A schematic of dual trolley BT systems operational process.

Figure 18.
A schematic of dual trolley BT systems power source.


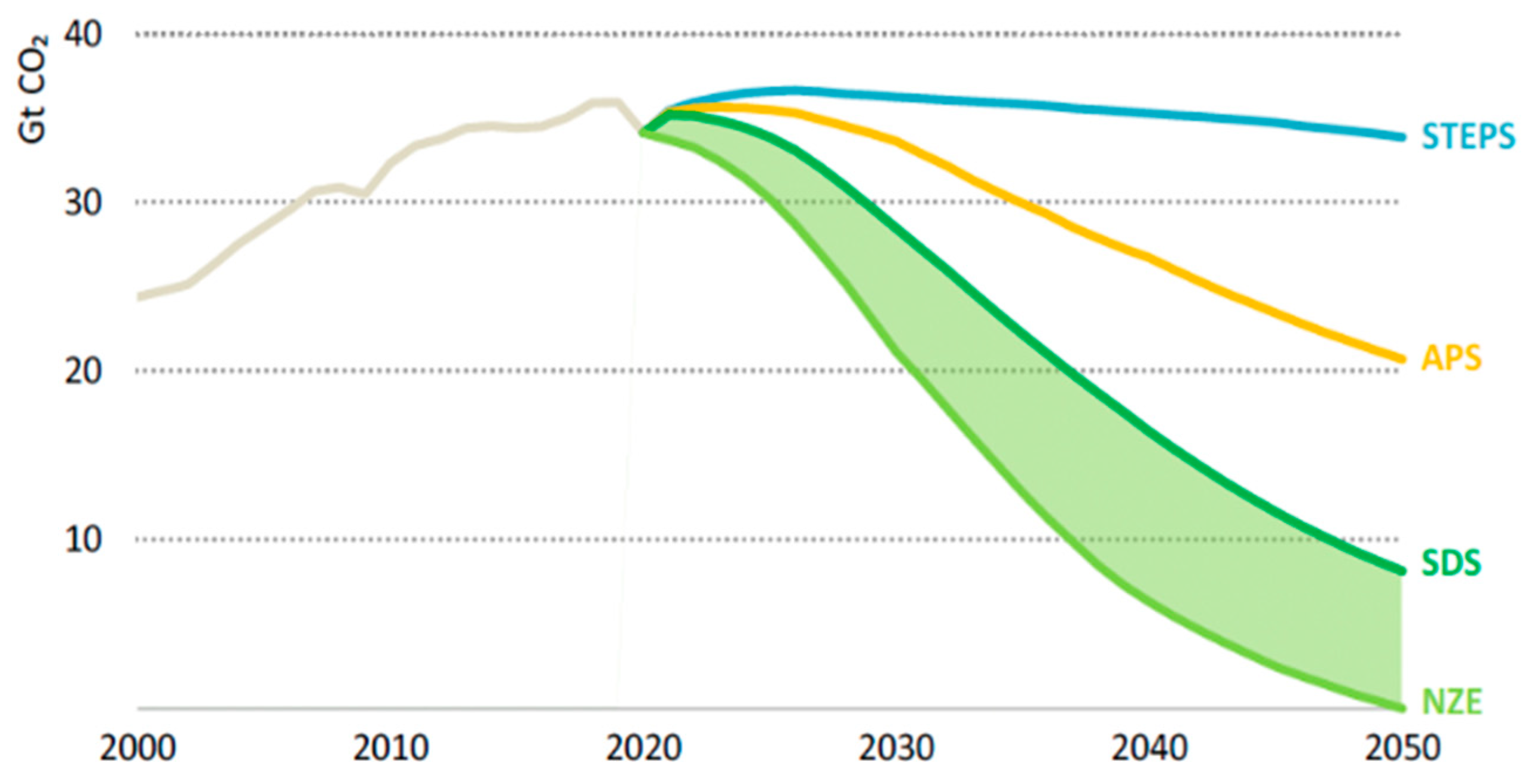{kind=link}
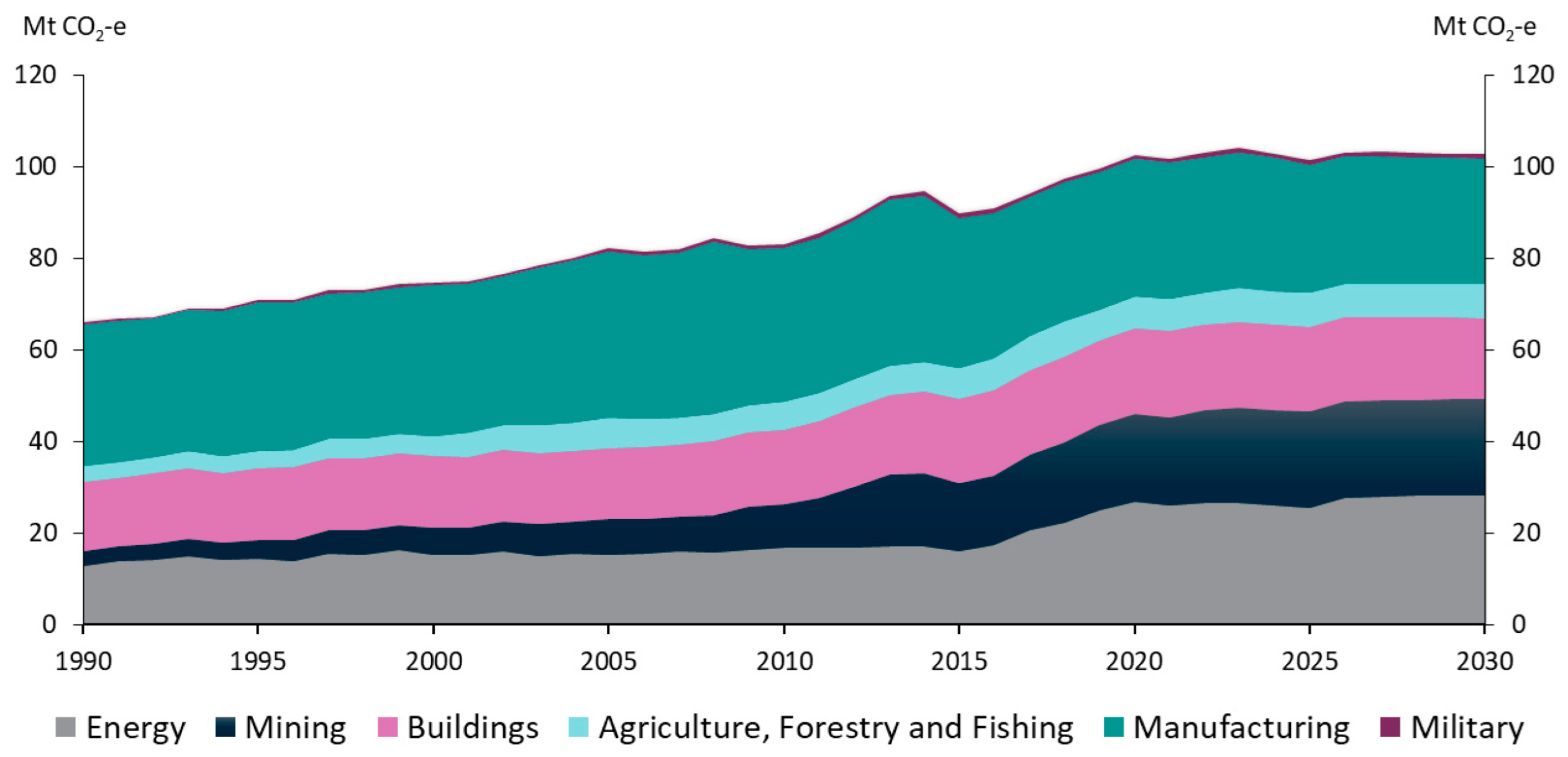{kind=link}
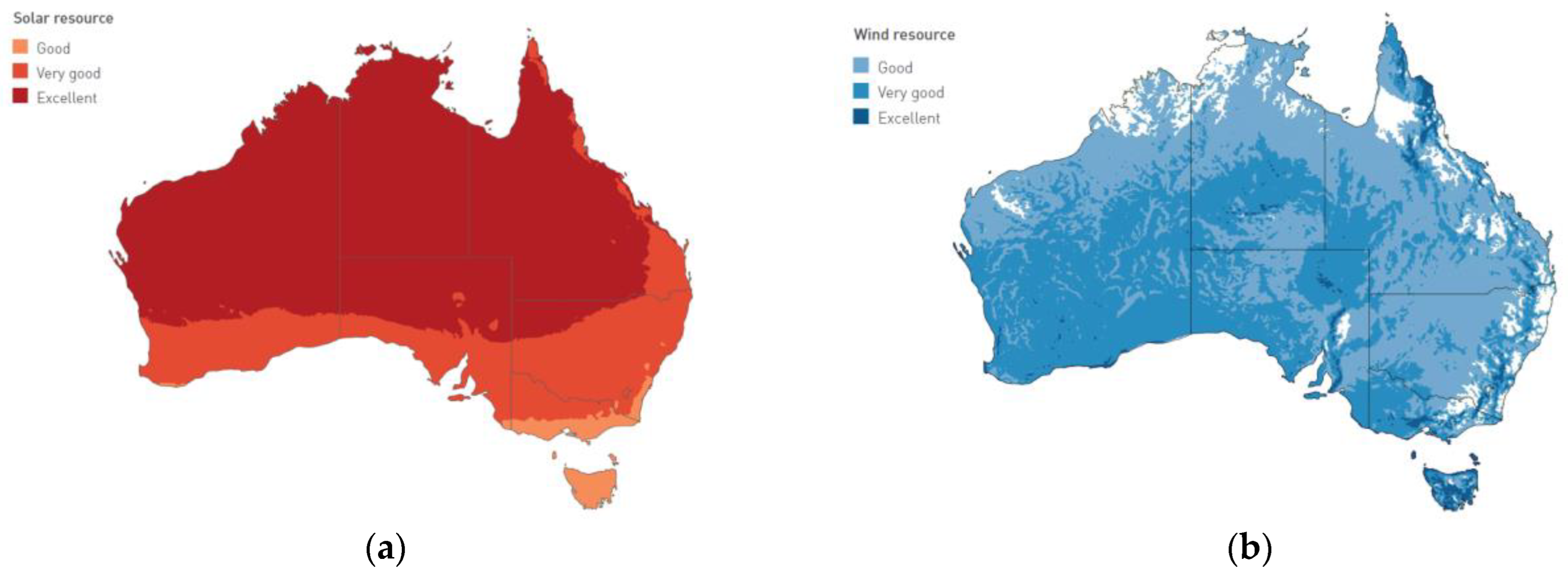{kind=link}
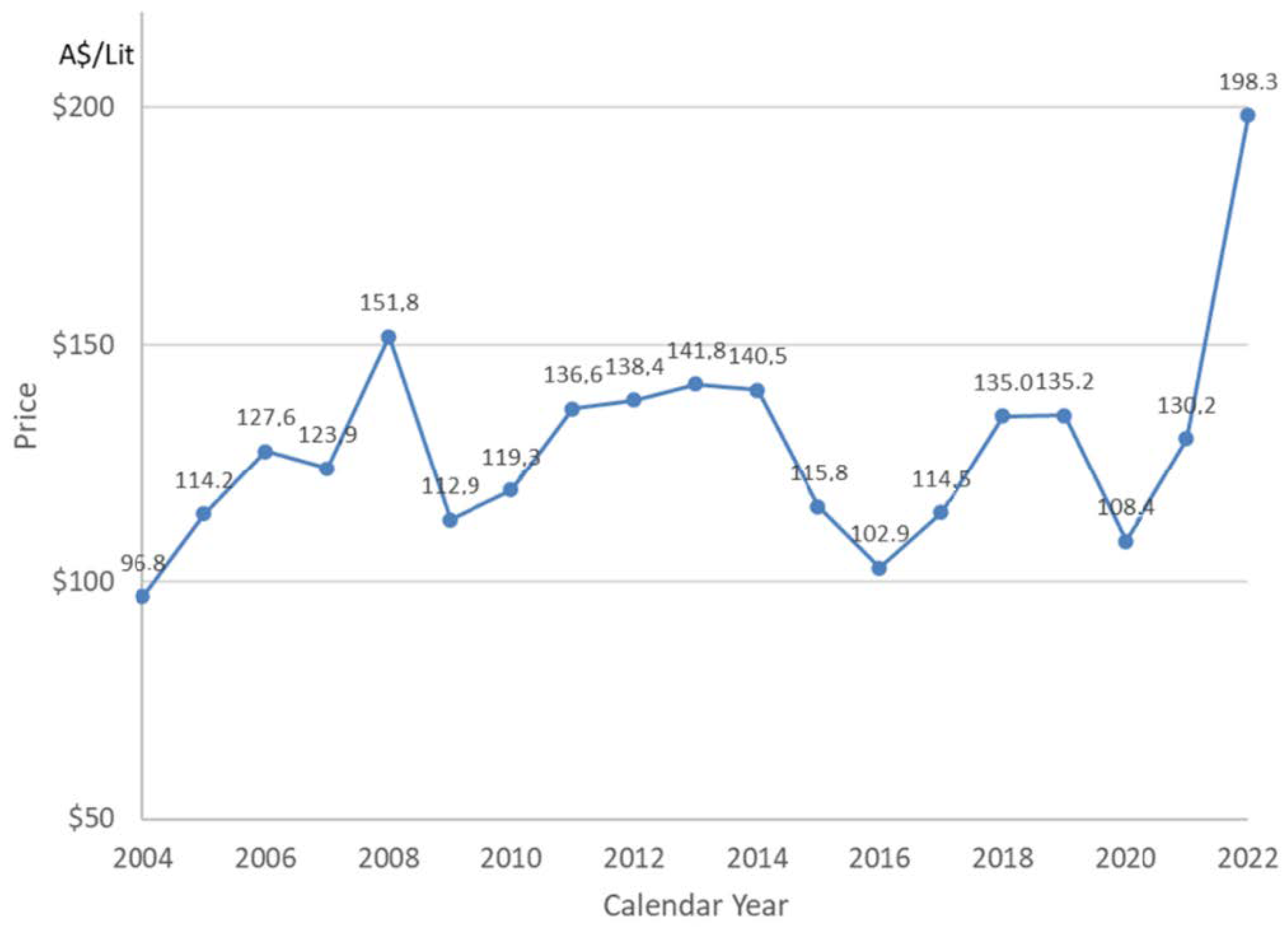{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
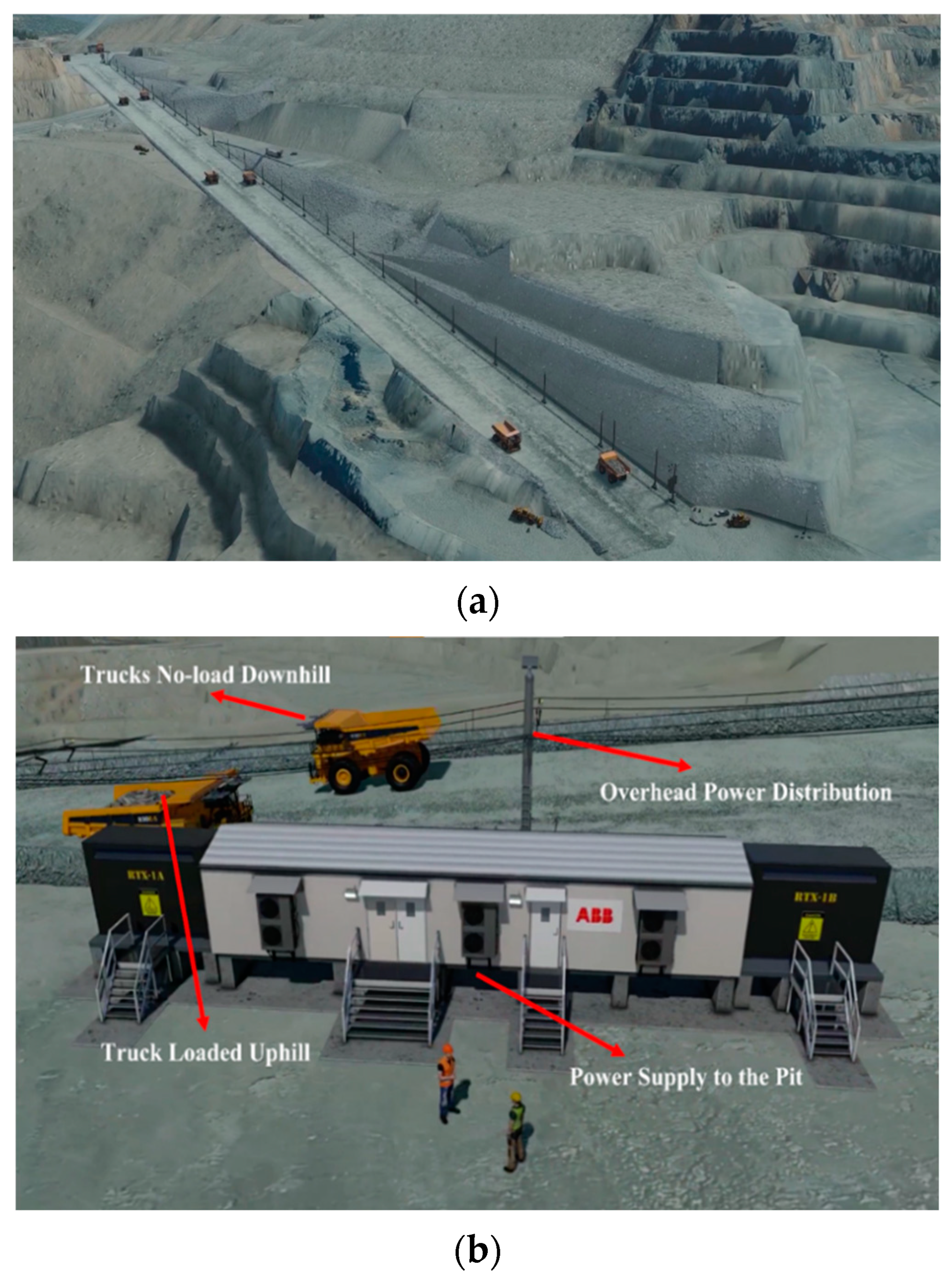{kind=link}
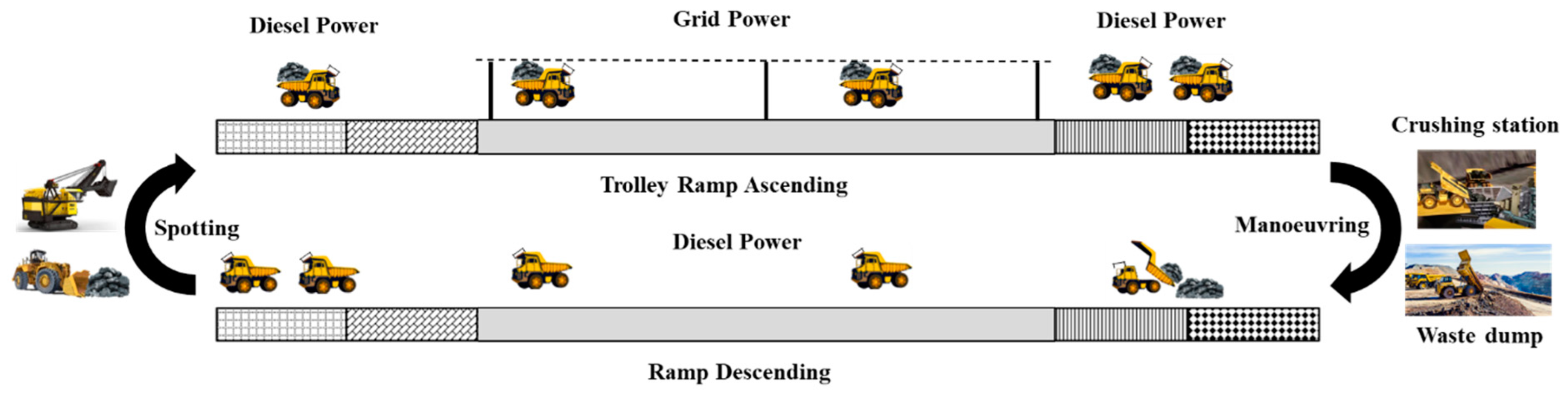{kind=link}
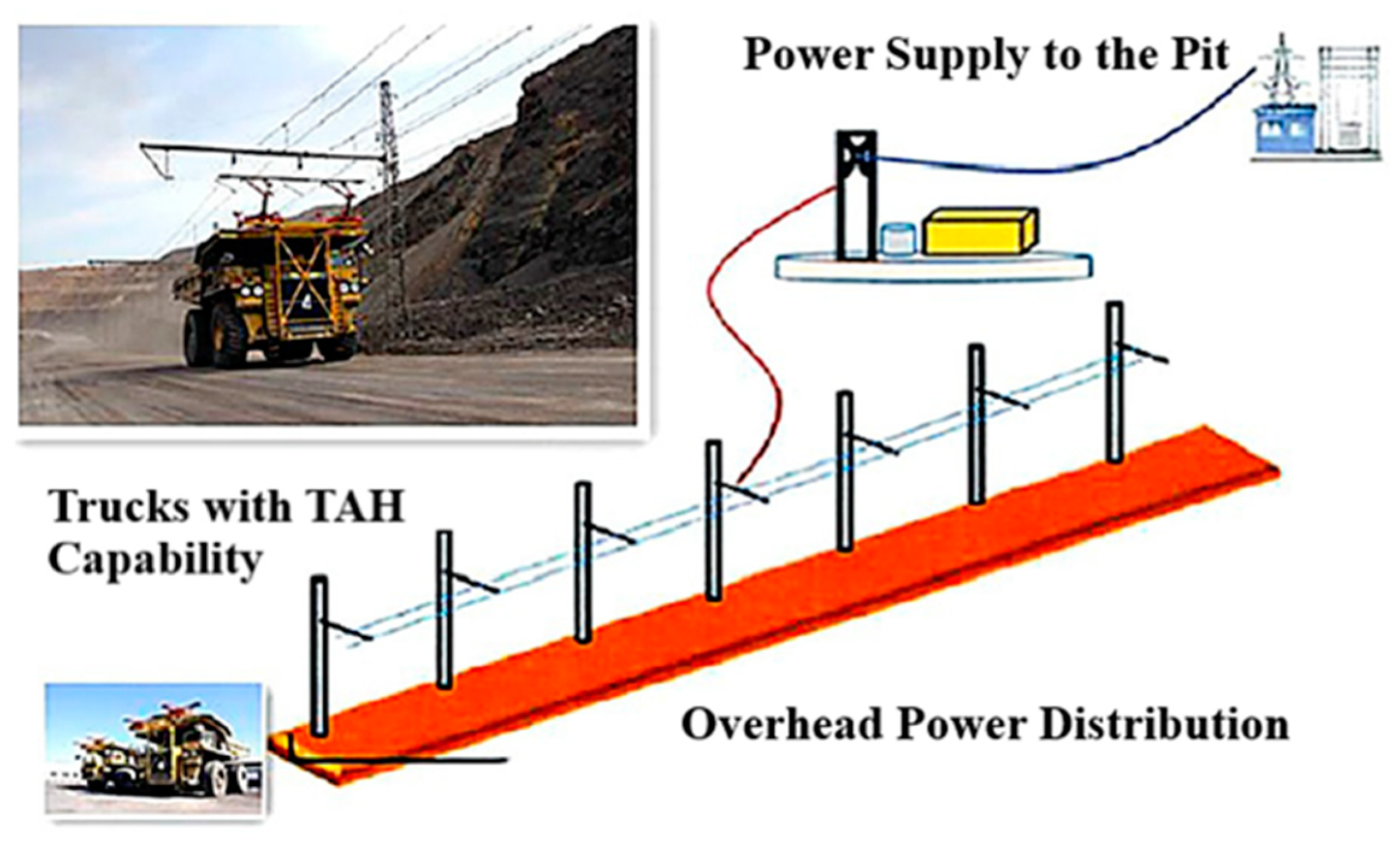{kind=link}
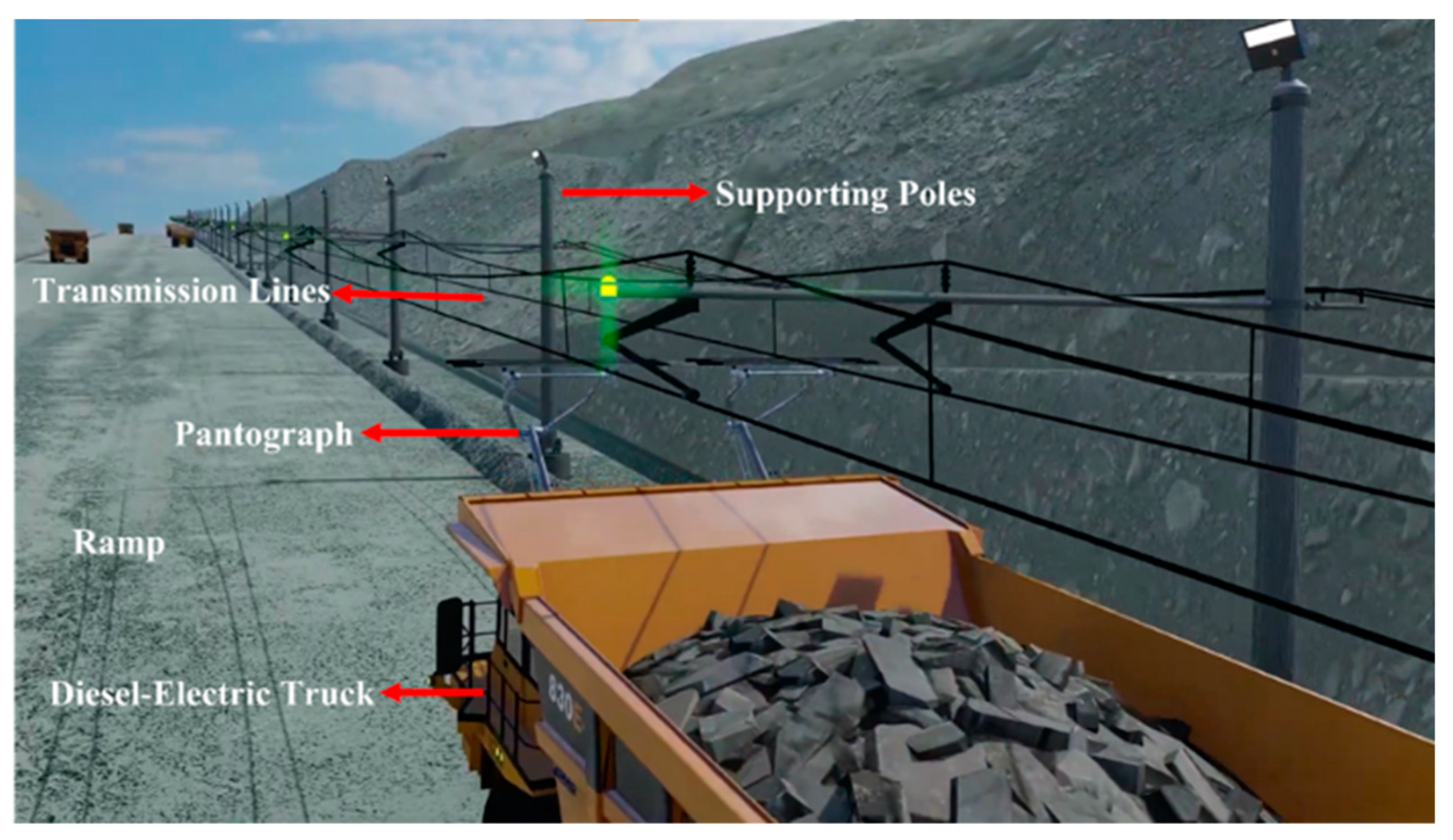{kind=link}
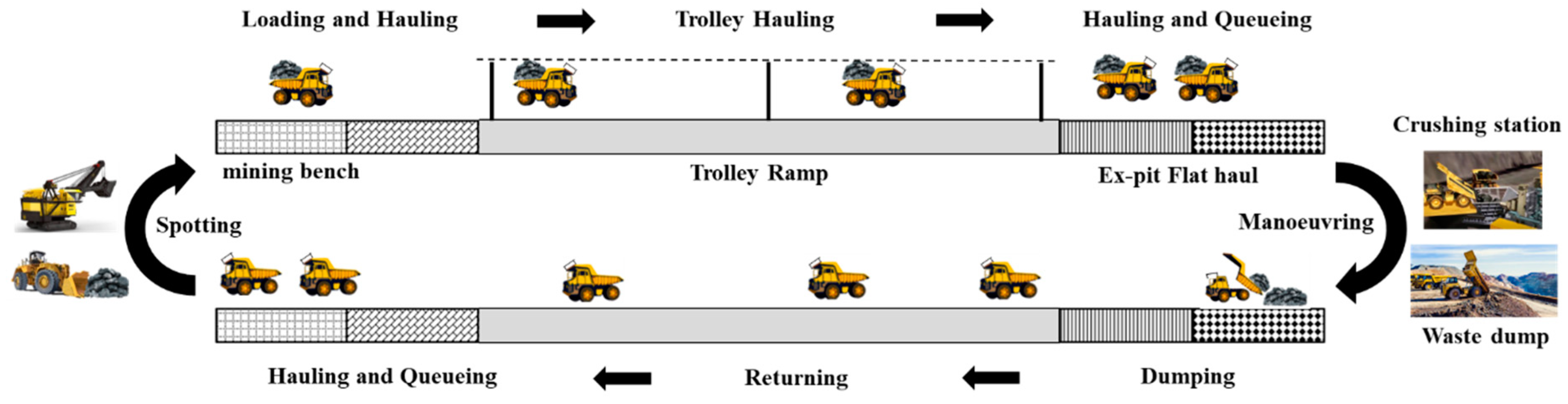{kind=link}
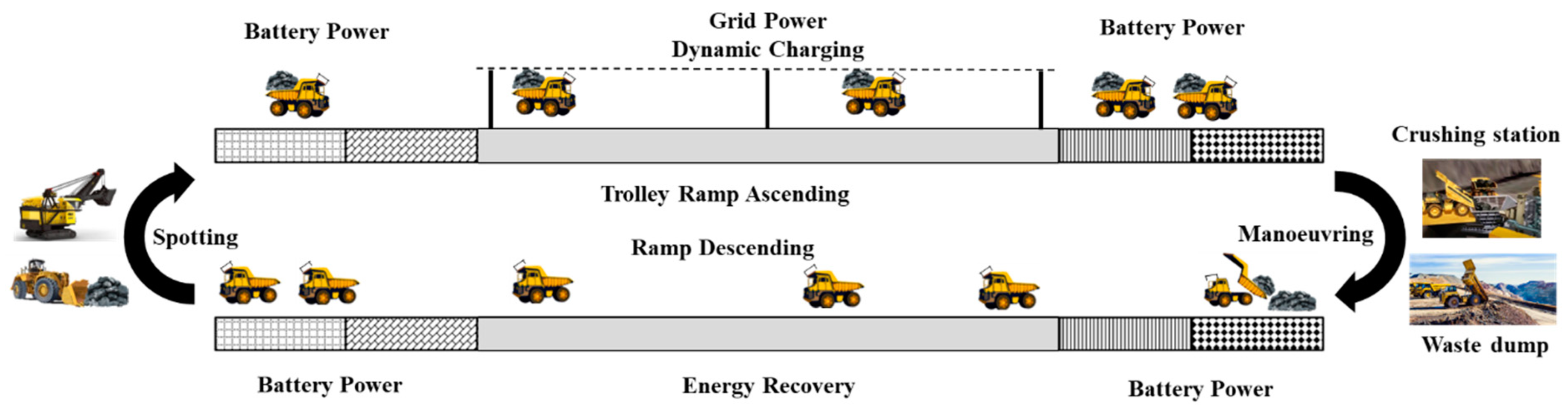{kind=link}
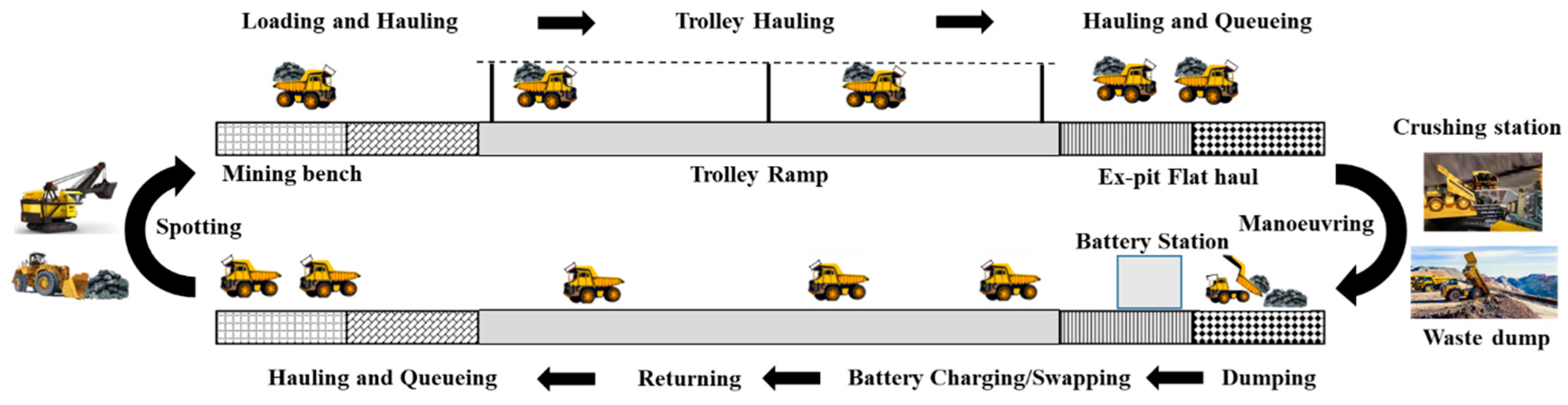{kind=link}
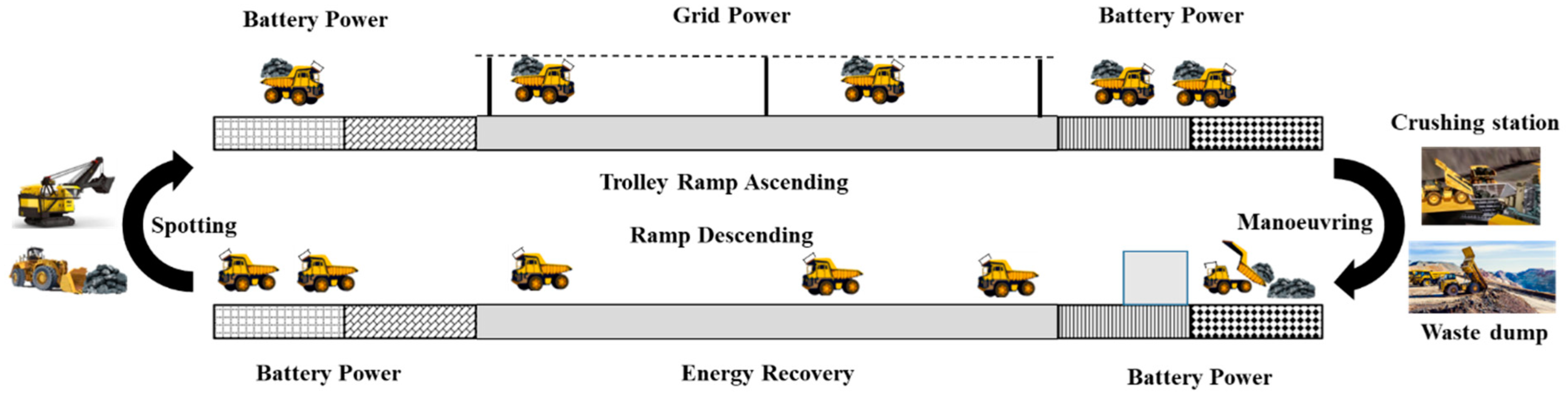{kind=link}
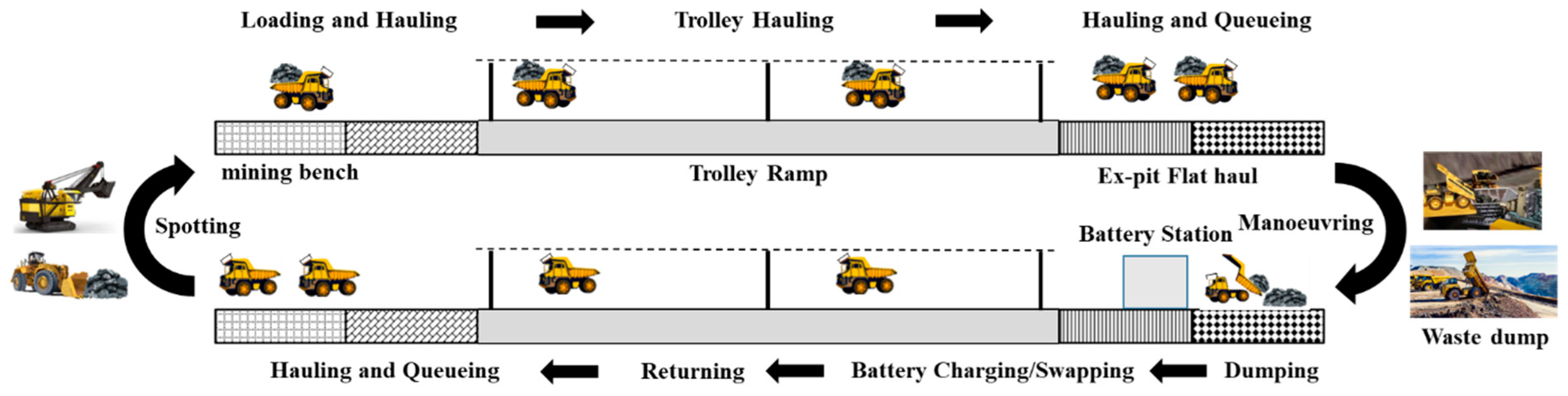{kind=link}
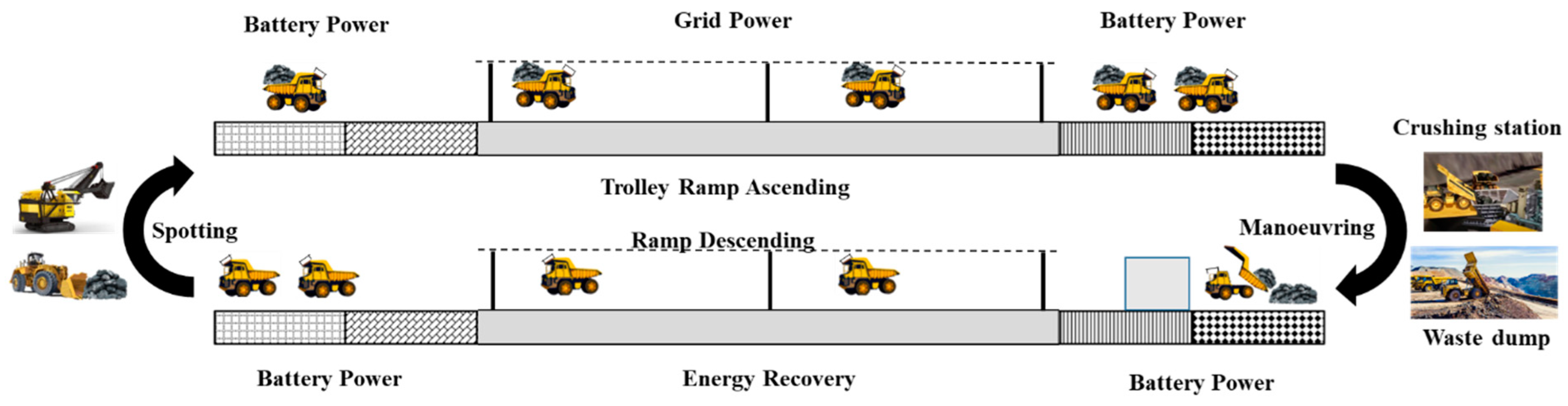{kind=link}
Table 1.
IPCC systems’ characteristics.
| IPCC Systems Type | Fixed IPCC | Semi-Fixed IPCC | Semi-Mobile IPCC | Fully Mobile IPCC |
|---|---|---|---|---|
| Crusher Type | Gyratory or jaw | Gyratory or jaw | Twin roll or sizer | Twin roll or sizer |
| Locations | Near the pit rim and crest | A strategic junction point in the pit | Near the operational level | Bench level in production |
| Relocations Time | Rarely or never relocated | Relocations every 3 to 5 years | Relocations every 6 to 18 months | Relocations as required to follow the shovel |
| Feed Systems | Shovel-Trucks | Shovel-Trucks | Shovel-Trucks and/or dozers | Shovels |
| Use | Deep hard rock mines—ore | Deep hard rock mines -waste or ore | Not common in deep hard rock mines -waste or ore | Not common in deep hard rock mines -waste or ore |
Table 2.
Comparison between diesel TS, IPCC, TA and BT.
| Parameter | Diesel TS | SF/M IPCC | FM-IPCC | TA | Dynamic Charging BT | Stationary Charging BT | Dual Trolley BT |
|---|---|---|---|---|---|---|---|
| Flexibility | High | Medium | Low | Medium | Low | Medium | Medium |
| Energy Efficiency | Low | Medium | High | Medium | High | High | High |
| CAPEX | Low | High | High | High | High | High | High |
| OPEX | High | Medium | Low | Low | Low | Low | Low |
| Maintenance Requirements | High | Medium | Low | Medium | Medium | Medium | High |
| Service Life | Short | Medium | Long | Long | Long | Long | Long |
| Additional Infrastructure | No | No | No | Yes | Yes | Yes | Yes |
| Refuelling/Recharging/Swapping | Fast | None | None | Fast | None | Low | Low |
| Emissions | High | Low | None | Low | None | None | None |
| Heat Generation | High | Medium | Low | Medium | Low | Low | Low |
| Environmental Footprint (Noise/Dust/DPM/Vibration) | High | Medium | Low | Medium | Low | Low | Low |
| Reliability | High | Medium | Low | Medium | Low | Medium | Low |
| Scalability | High | Low | Low | Medium | Low | Medium | Low |
| Capability | No | Yes | Yes | Yes | Yes | Yes | Yes |
| Safety | Low | Low | Medium | Low | Medium | Medium | Medium |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bao, H.; Knights, P.; Kizil, M.; Nehring, M. Electrification Alternatives for Open Pit Mine Haulage. Mining 2023, 3, 1-25. https://doi.org/10.3390/mining3010001
AMA Style
Bao H, Knights P, Kizil M, Nehring M. Electrification Alternatives for Open Pit Mine Haulage. Mining. 2023; 3(1):1-25. https://doi.org/10.3390/mining3010001
Chicago/Turabian StyleBao, Haiming, Peter Knights, Mehmet Kizil, and Micah Nehring. 2023. "Electrification Alternatives for Open Pit Mine Haulage" Mining 3, no. 1: 1-25. https://doi.org/10.3390/mining3010001