

Integration of EV in the Grid Management: The Grid Behavior in Case of Simultaneous EV Charging-Discharging with the PV Solar Energy Injection †


Abstract
:1. Introduction
- 1.
- G2V: Grid-to-Vehicle; in this case, the grid sends power to the vehicle; in other words, the vehicle is charging.
- 2.
- V2G: Vehicle-to-Grid; in this case, the vehicle sends power back to the grid; in other words, the vehicle is discharging the power back to the grid.
- 3.
- V2V: Vehicle-to-Vehicle; in this case, two vehicles share a bus; one is charging, while another is discharging.
- 4.
- V2X: Vehicle-to-Load; in this case, the vehicle supplies power to any load on the same bus.
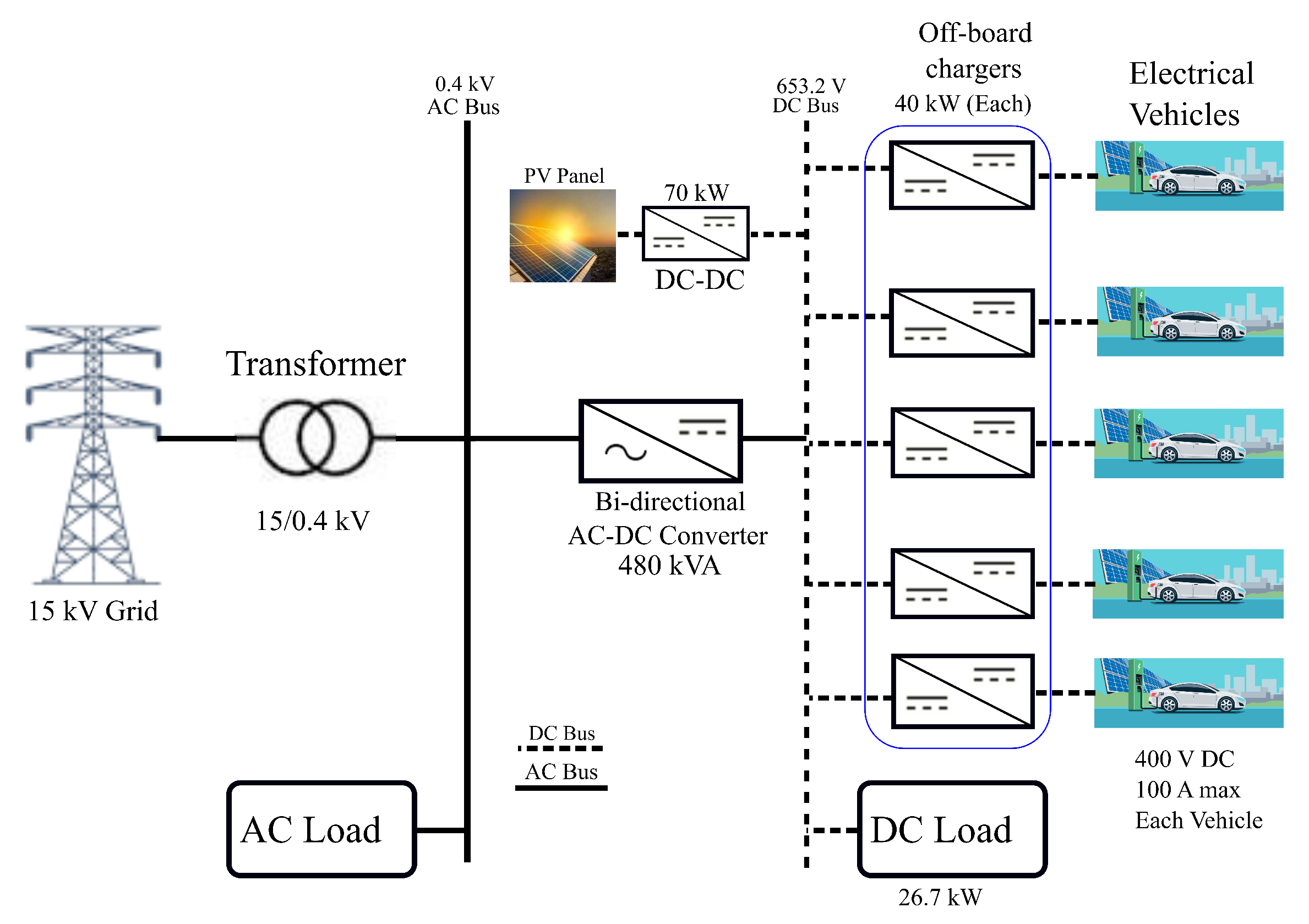
2. Microgrid Components, Structure and Controls
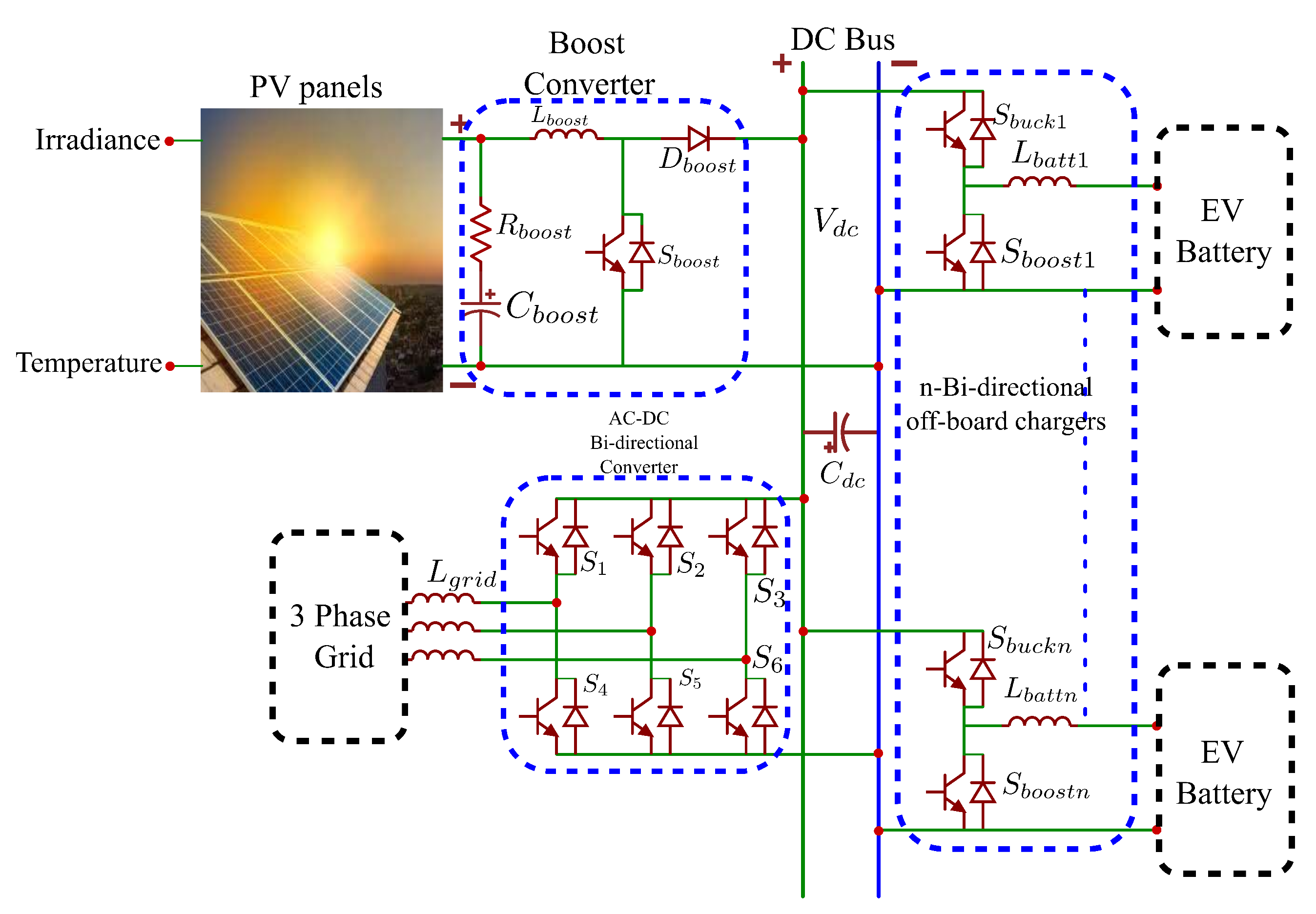
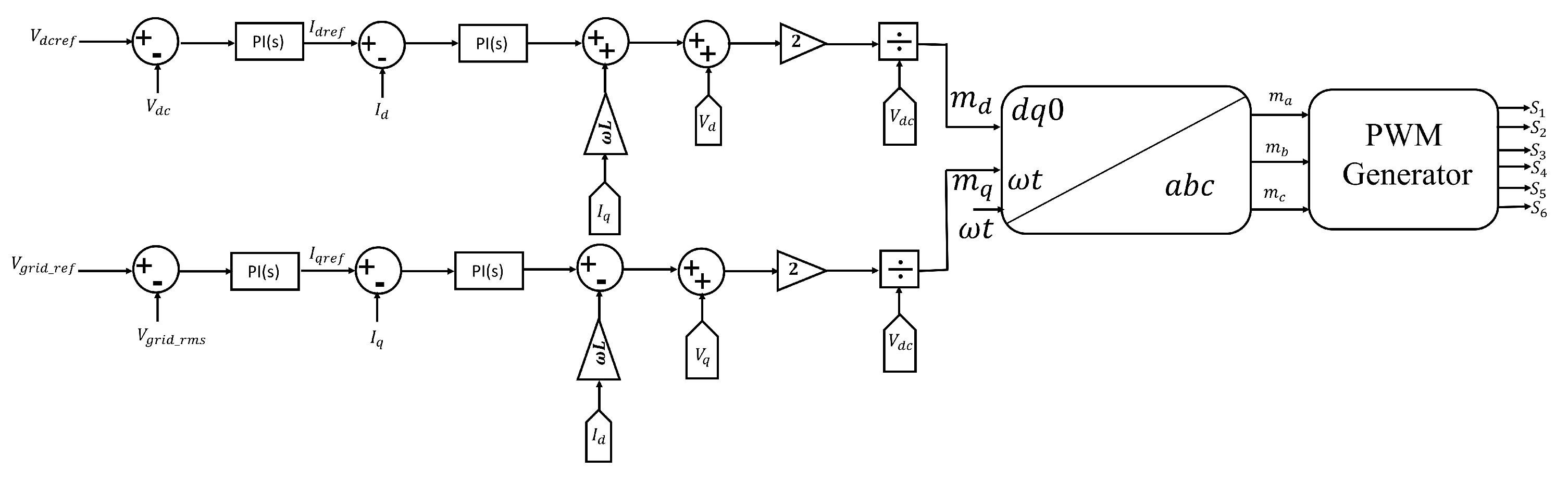
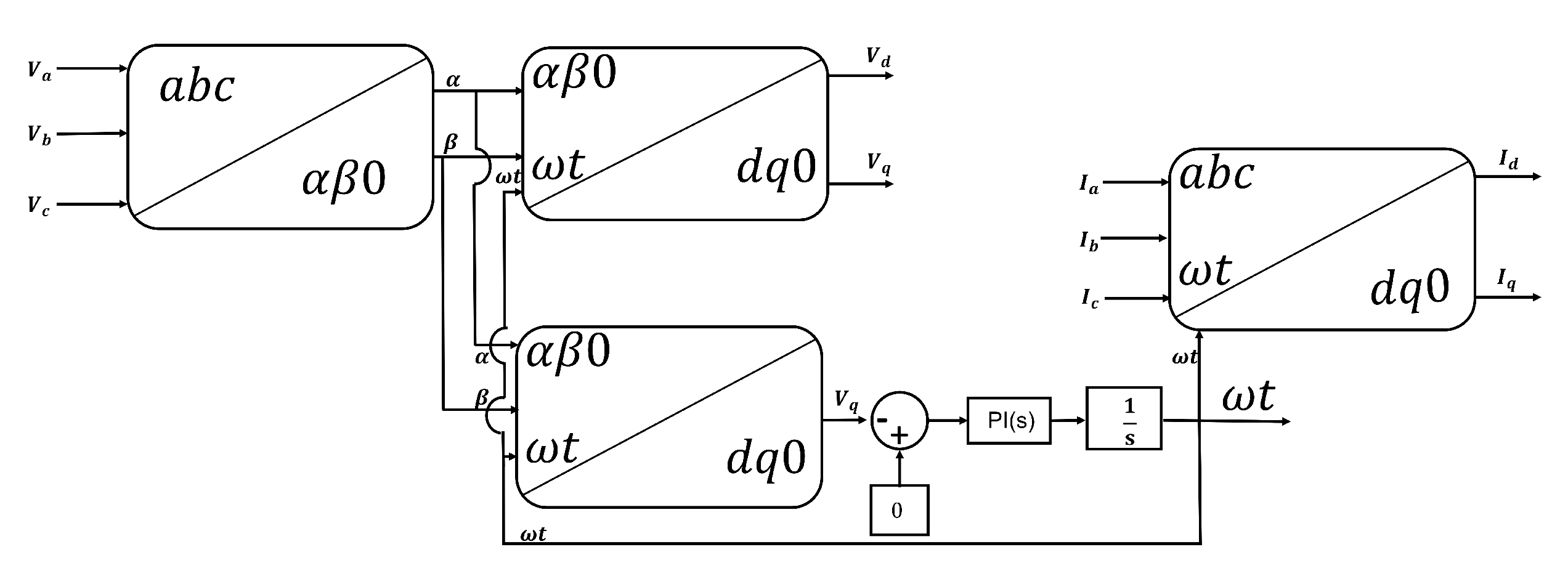
2.1. Grid Connected Inverter
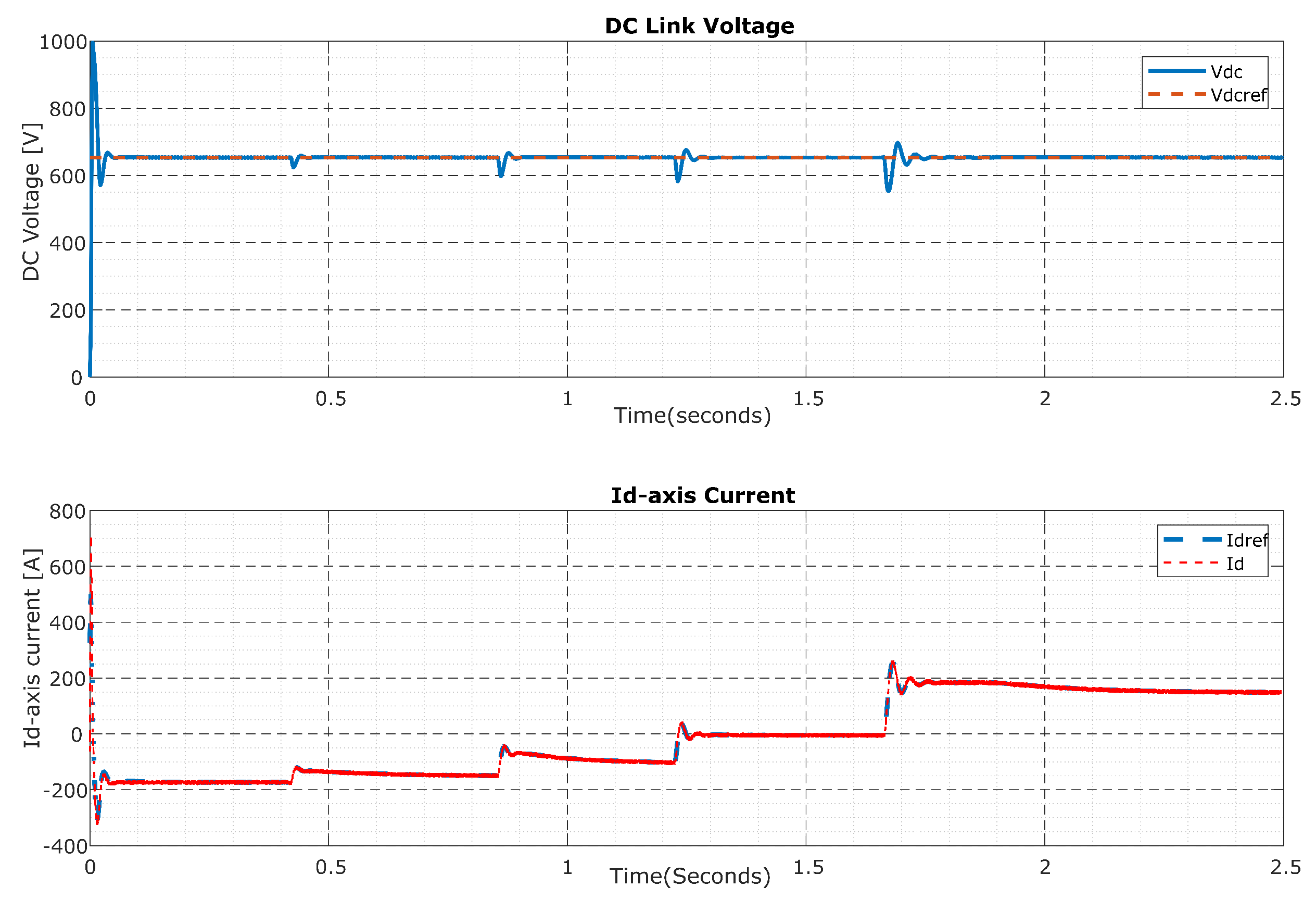
DC Link Voltage Control
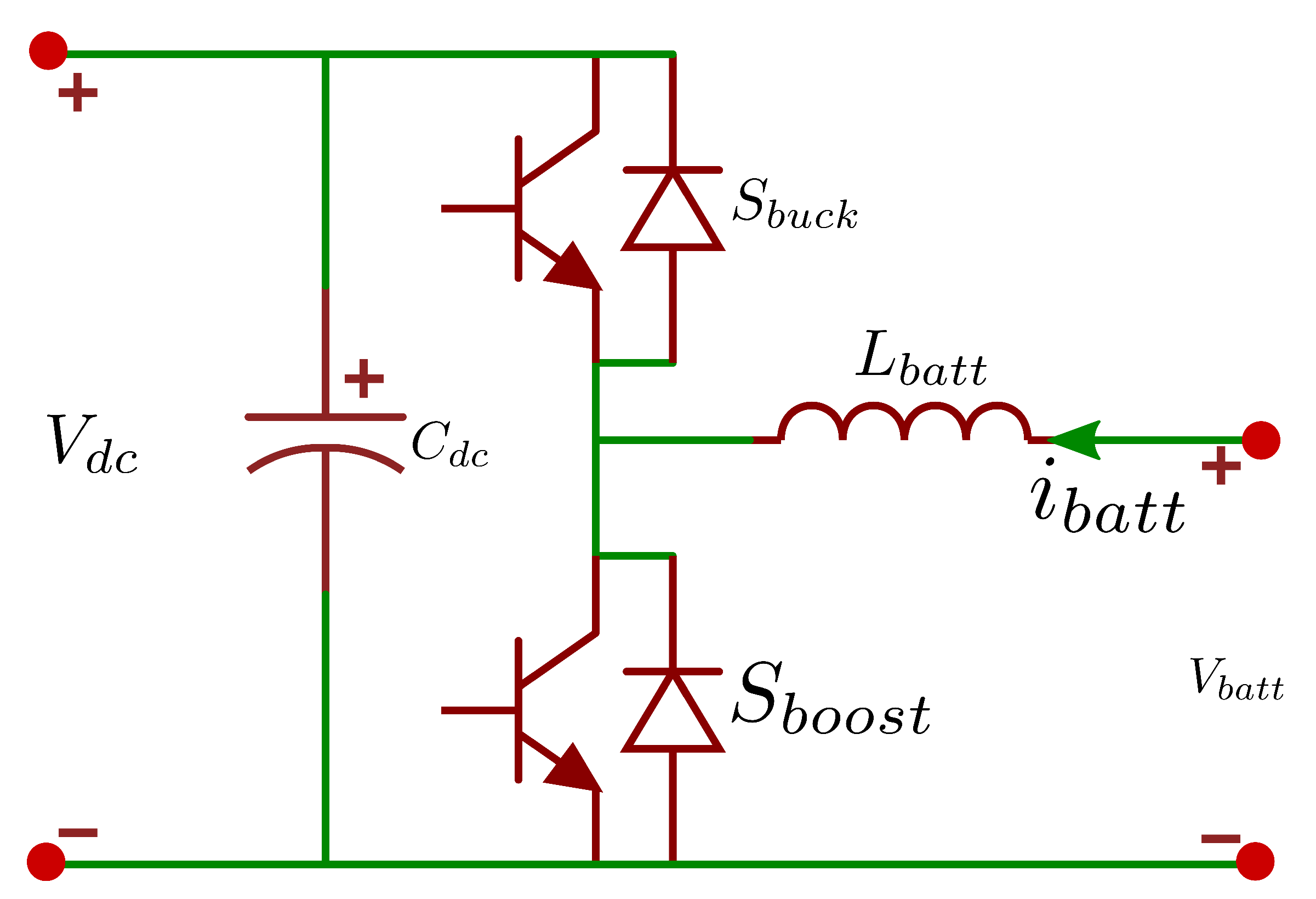
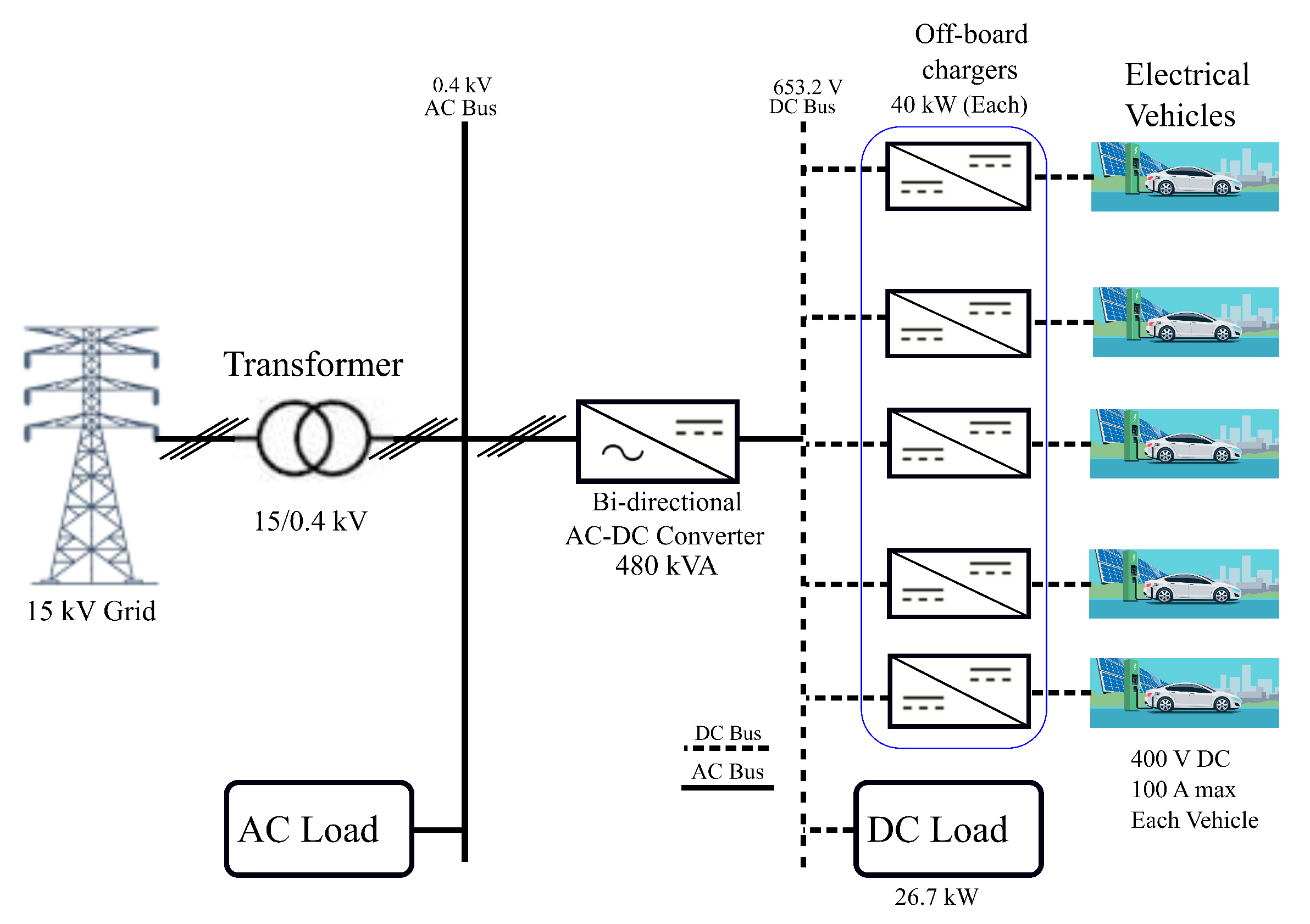
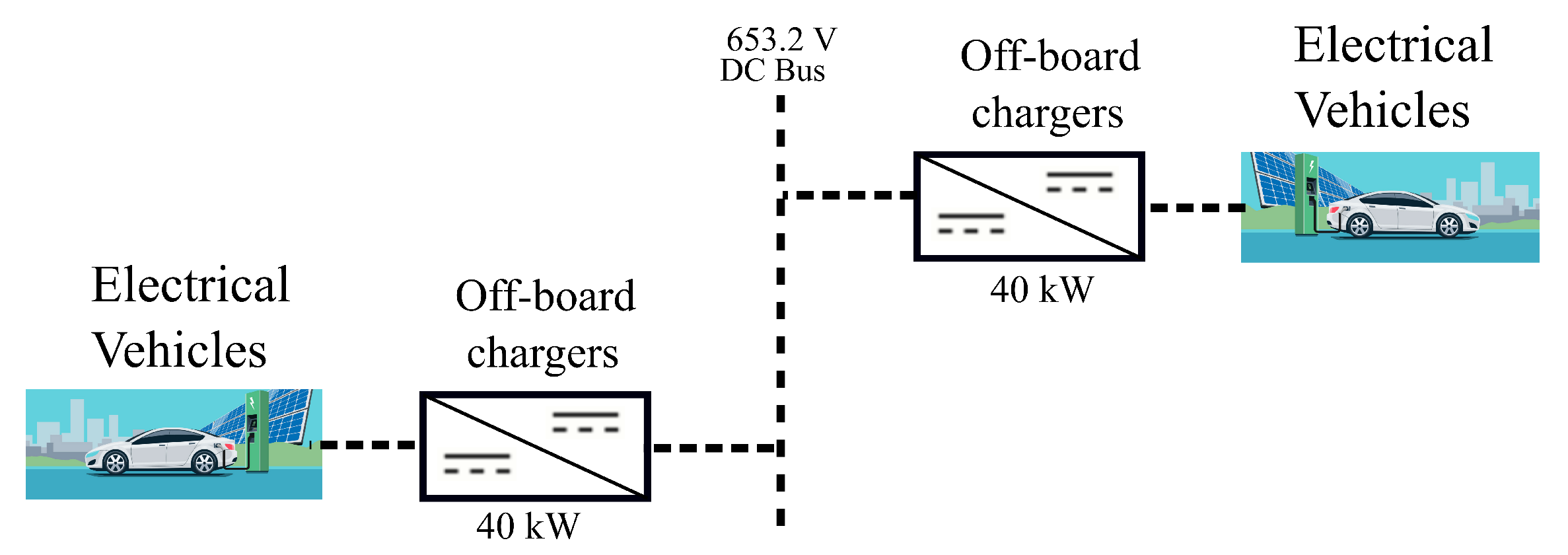
2.2. Off-Board Battery Chargers Configuration
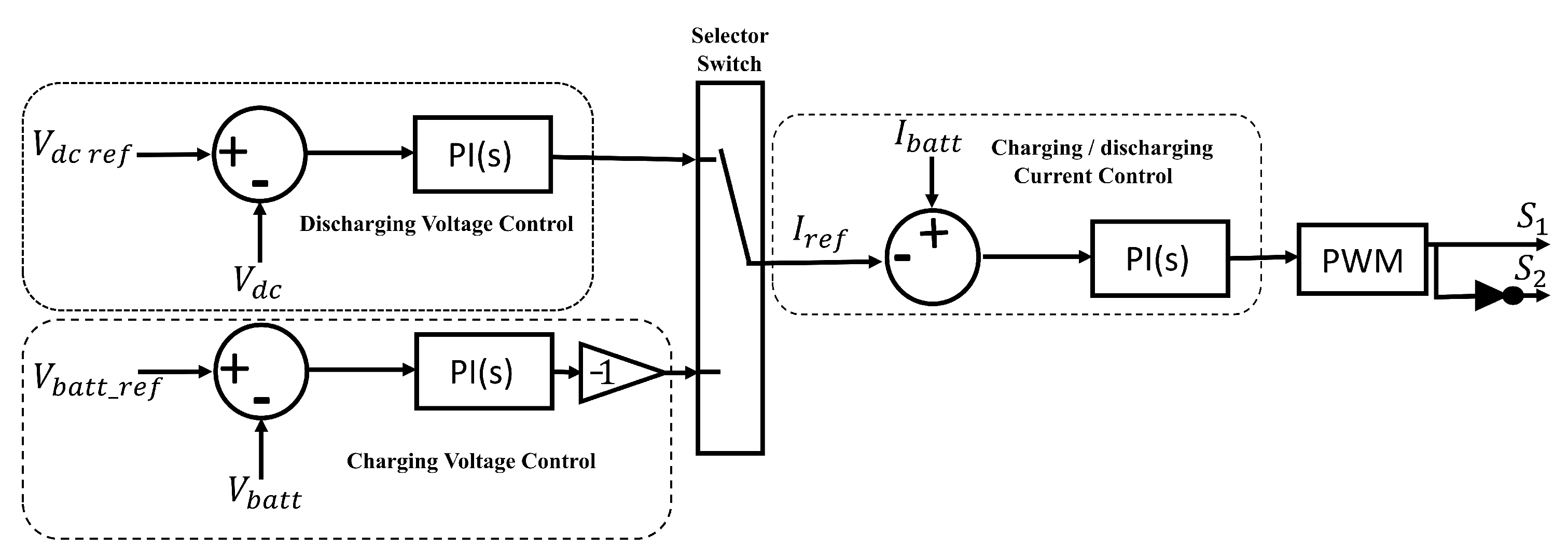
2.2.1. EV Charging and Discharging Control
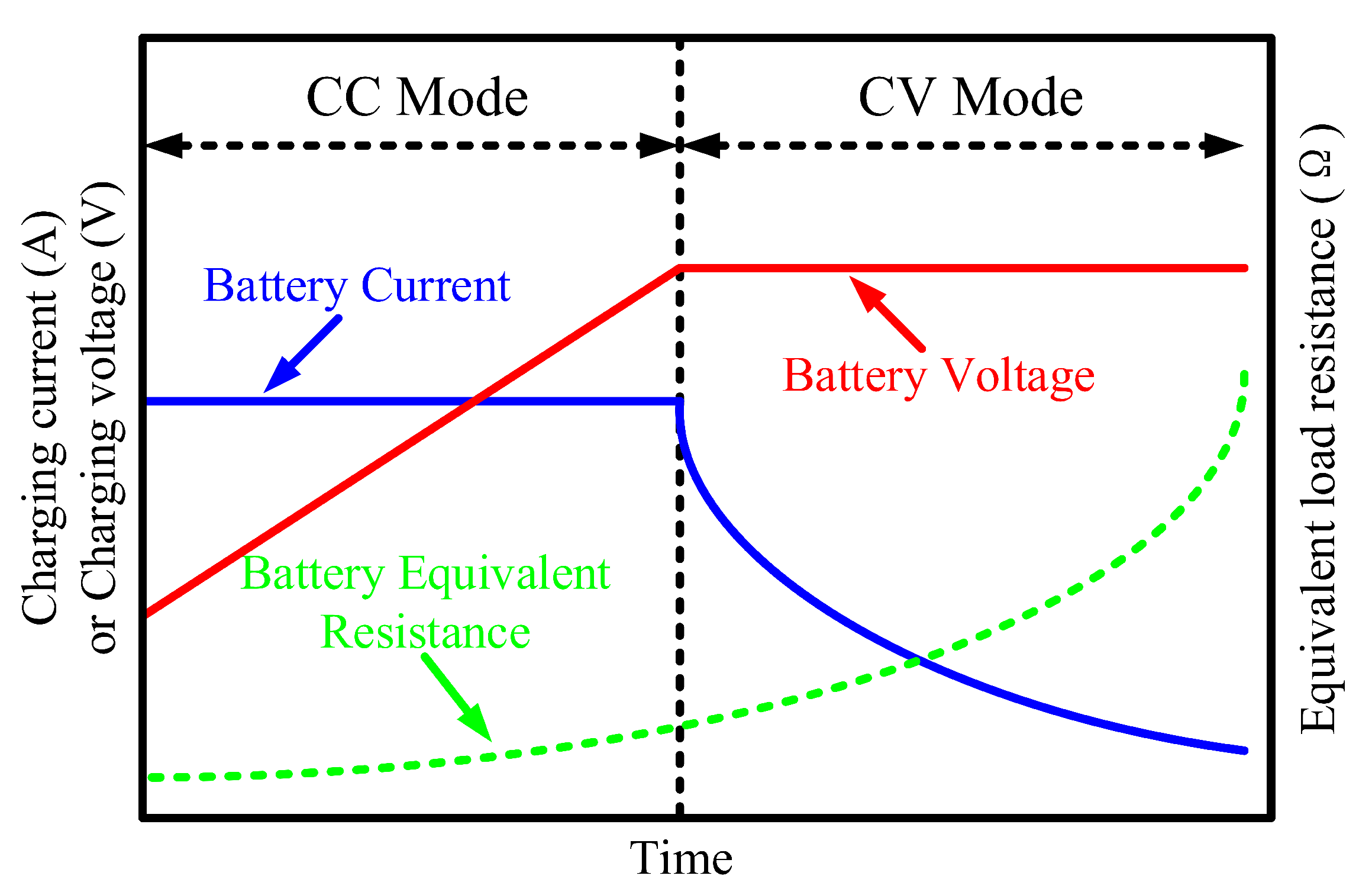
2.2.2. Mode of Battery Charging
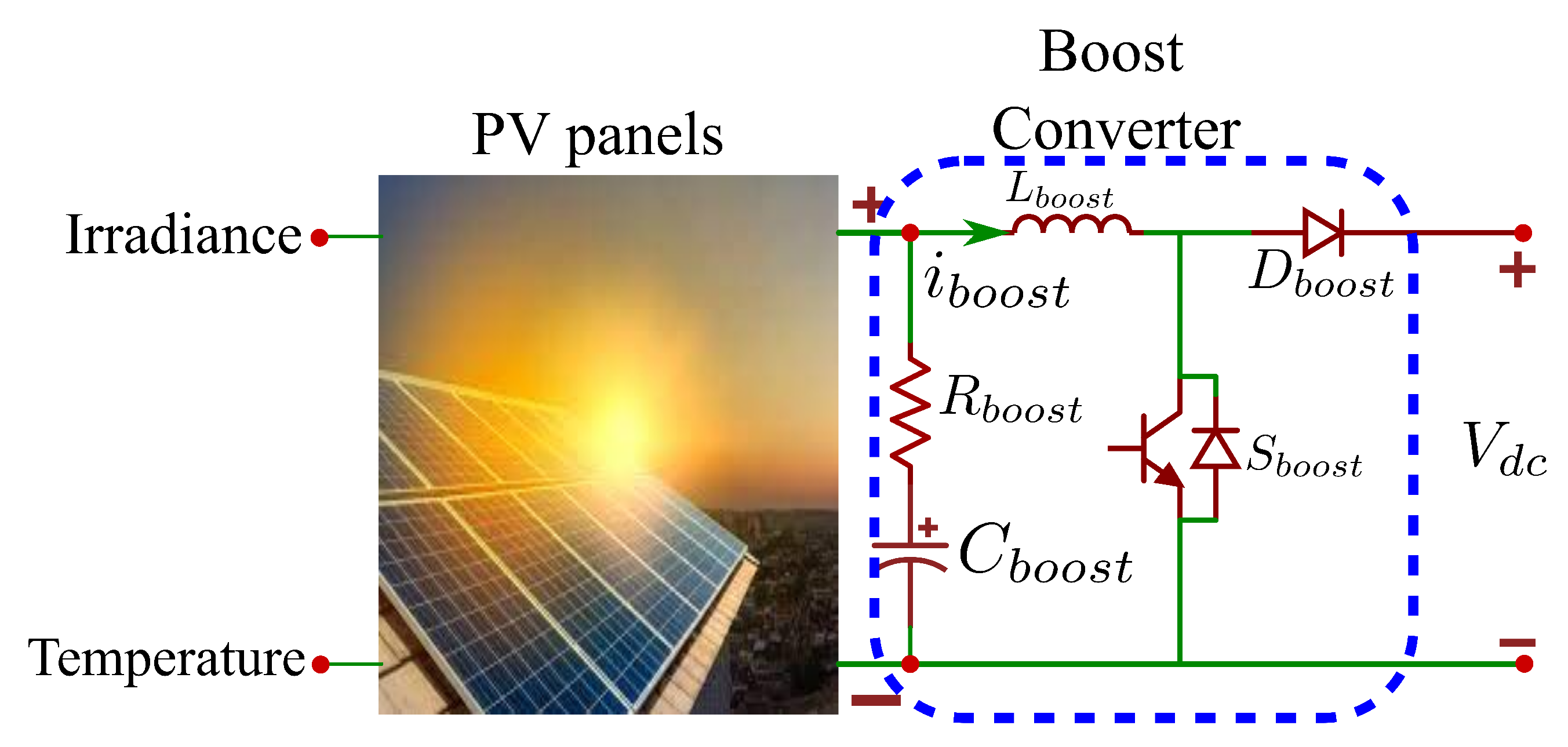
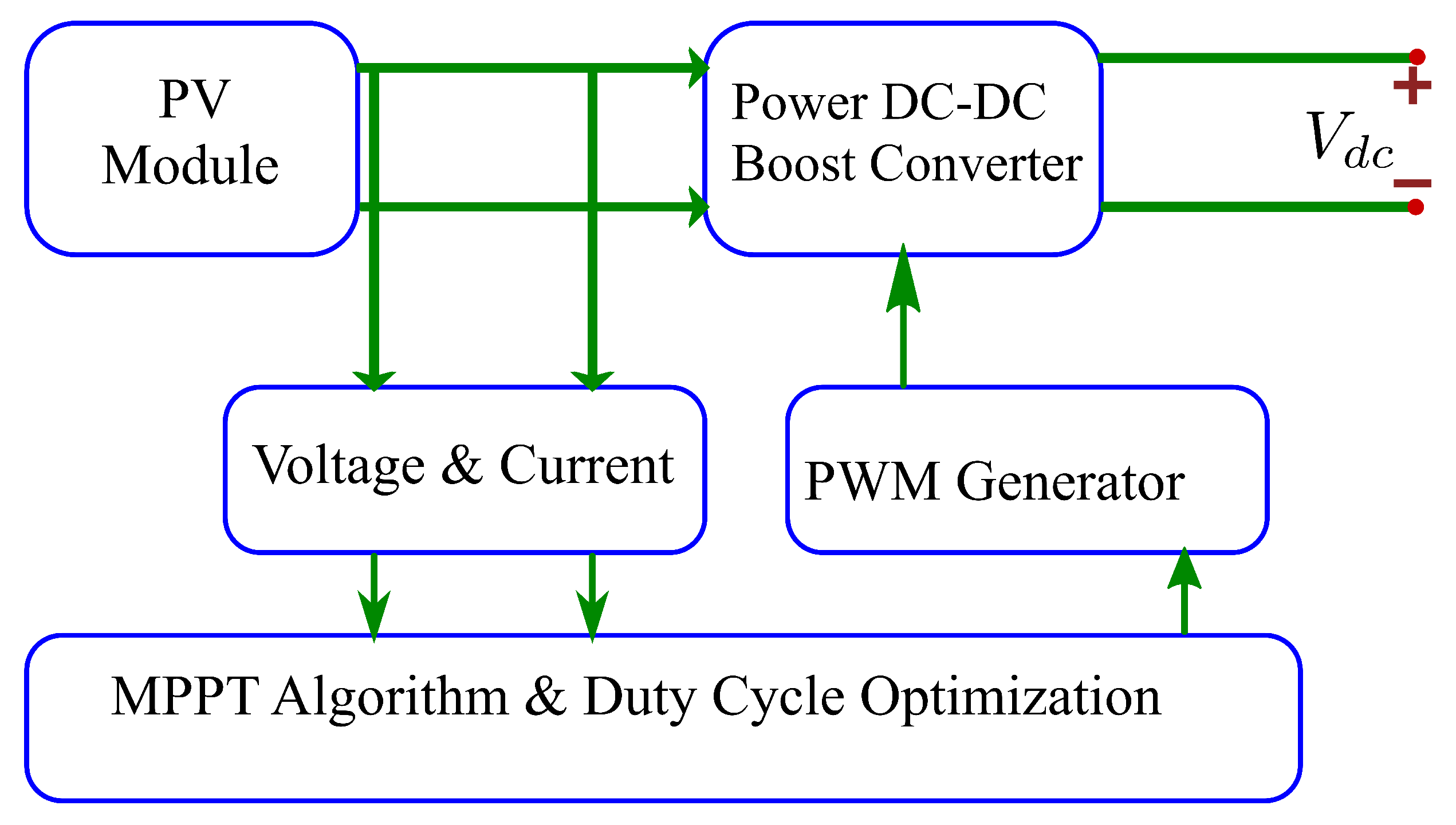
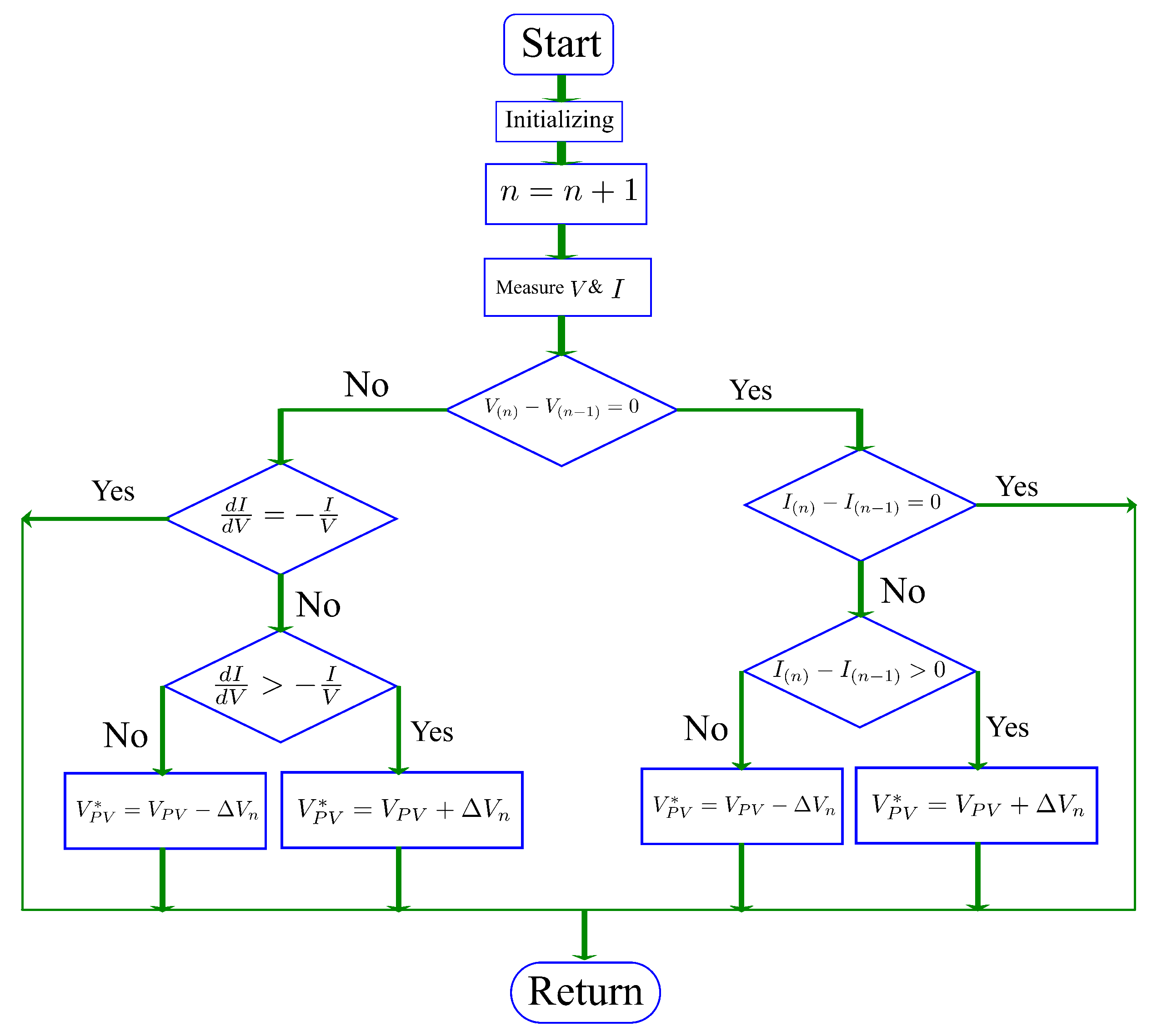
2.3. PV Array Power Supply System
3. Microgrid Modes of Operation
3.1. G2V or Charging Mode
3.2. V2G or Discharging Mode
3.3. V2V or Combination of Charging and Discharging Mode
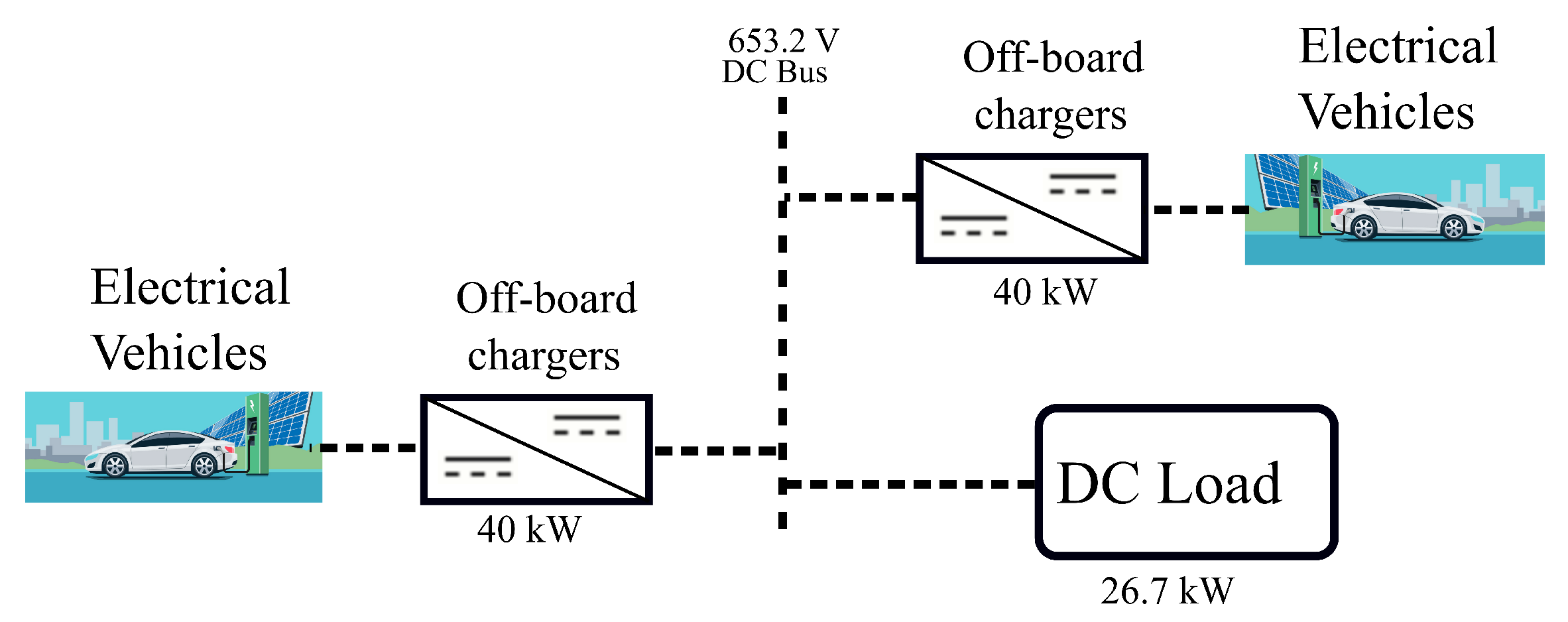
3.4. V2X or the Case Where the Vehicle Supplies Various Loads on the Same Bus
4. Microgrid Power Flow Analysis
- 1.
- is the grid power, it can flow in both directions inside the micro-grid. This means that is negative when it flows to the grid and is positive when it flows from the grid to the EVs or load.
- 2.
- is the EV power, it can flow in both directions inside the microgrid. This means that is negative when the EV batteries are charging, and positive when the EV batteries are sending power back to the grid, to the load or to other charging EVs.
- 3.
- is the PV power, and this power is always positive and unidirectional as it gives away power either to the grid or to EVs.
- 4.
- is the load power, the DC bus supplies some other DC loads.
4.1. All EV Are Charging on the Grid
- 1.
- The solar power , this implies that there is no solar power contribution.
- 2.
- There are no EVs sending power to the grid; all EVs are charging .
- 3.
- There is no power consumed by any other load.
4.2. All EVs Are Charging on the Grid with PV Power Injection
- 1.
- The solar power ; this implies that there is a solar power contribution to the grid.
- 2.
- There are EVs sending power to the grid; all EVs are charging .
- 3.
- There is no power consumed by any other load.
4.3. Simultaneous EVs Charging and Discharging on the Grid without PV Power Injection
- 1.
- The solar power , this implies that there is no solar power contribution to the grid.
- 2.
- Some EVs are sending power to the grid (), while others are getting power from the grid or charging ().
- 3.
- There is no power consumed by any other load.
4.4. Simultaneous EVs Charging and Discharging on the Grid with the PV Power Injection
- 1.
- The solar power ; this implies that there is solar power contribution to the grid.
- 2.
- Some EVs are sending power to the grid (), while others are getting power from the grid or charging ().
- 3.
- There is no power consumed by any other load.
5. Simulations and Results
5.1. Simulink Model and Simulations
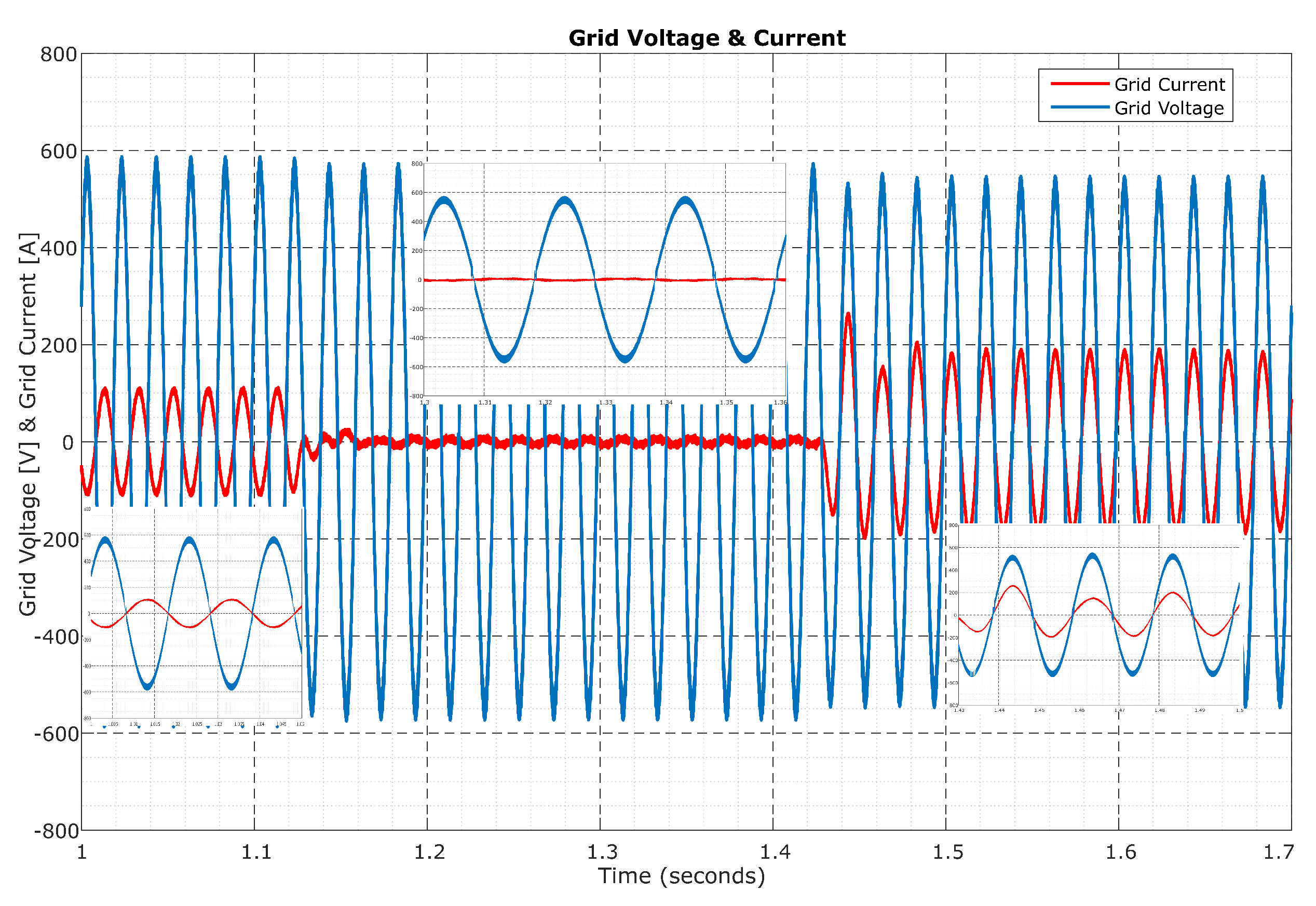
5.2. Simulation Results without Solar Integration
5.3. Simulation Results with Solar Integration
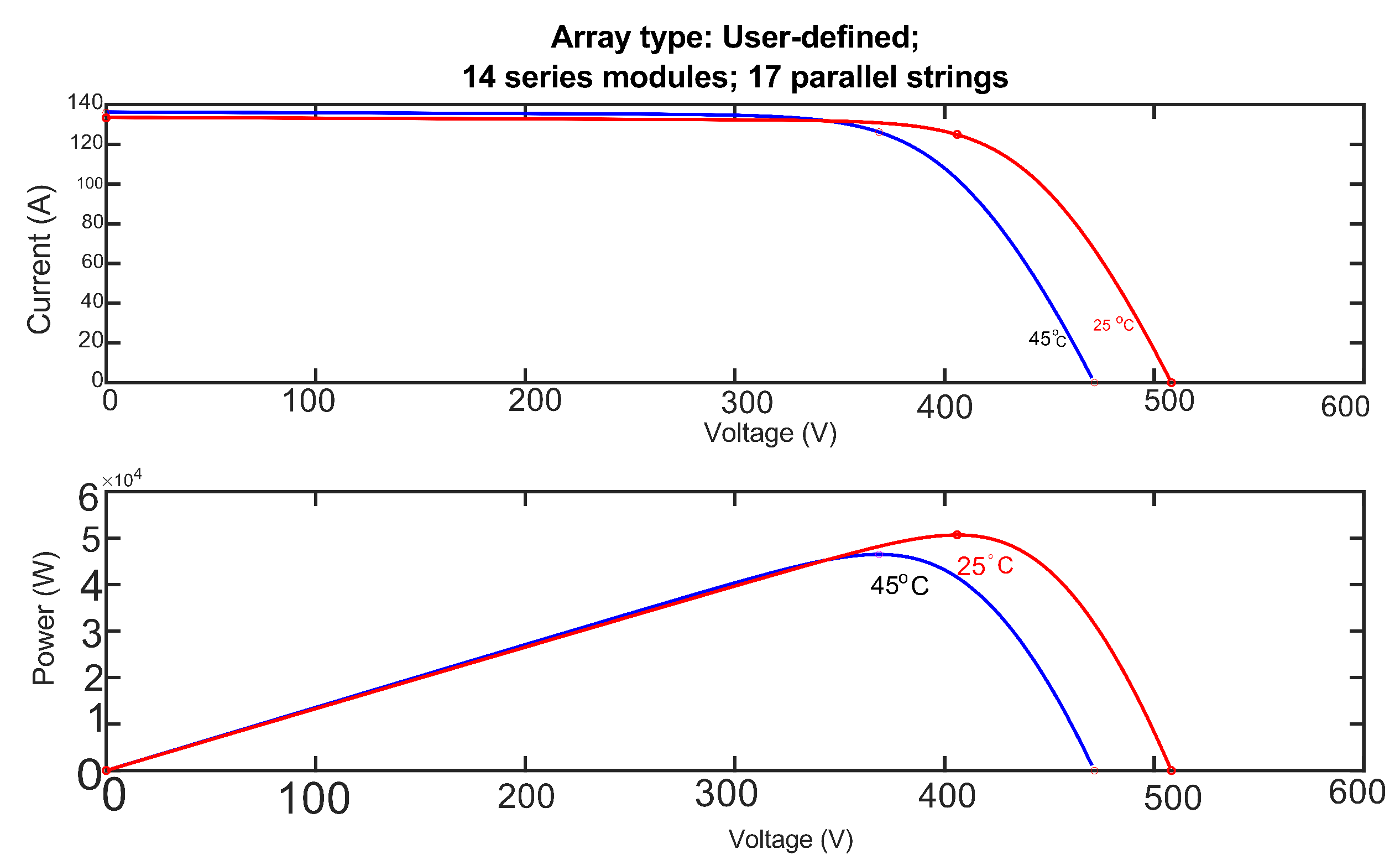
5.3.1. PV Array Structure
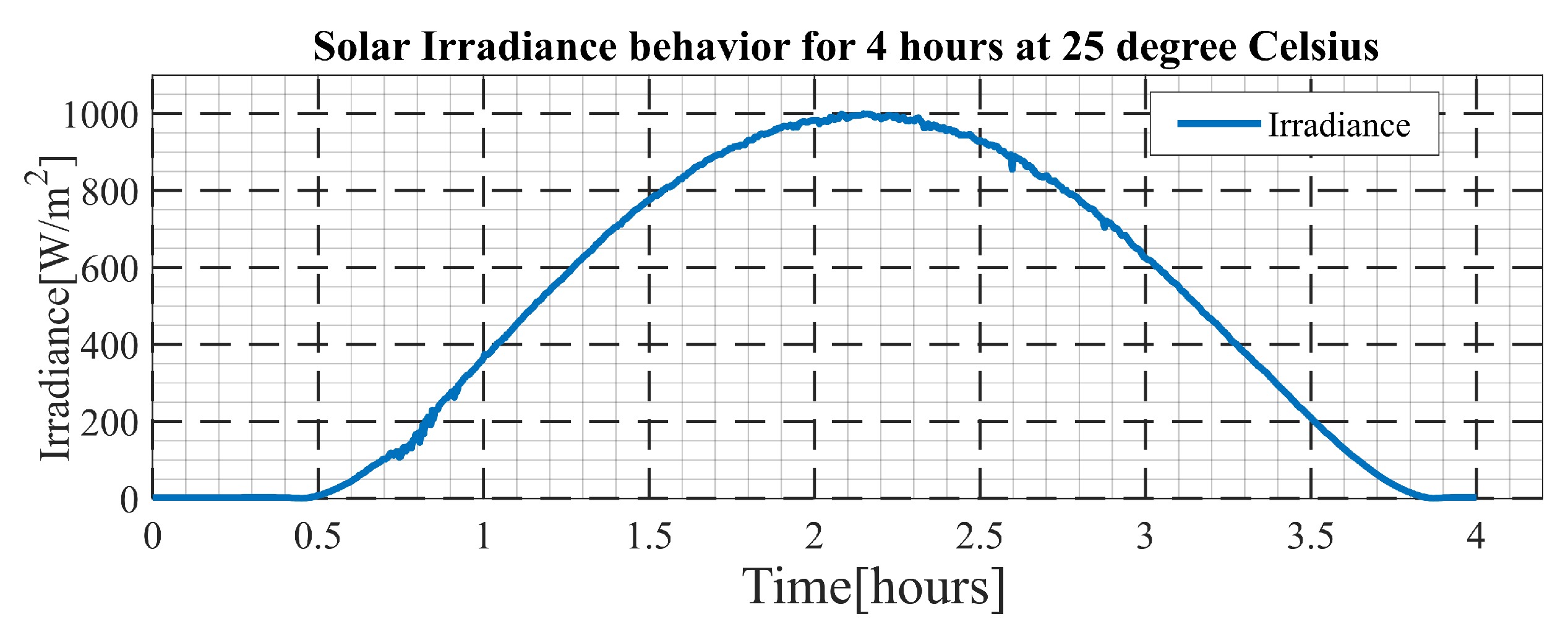
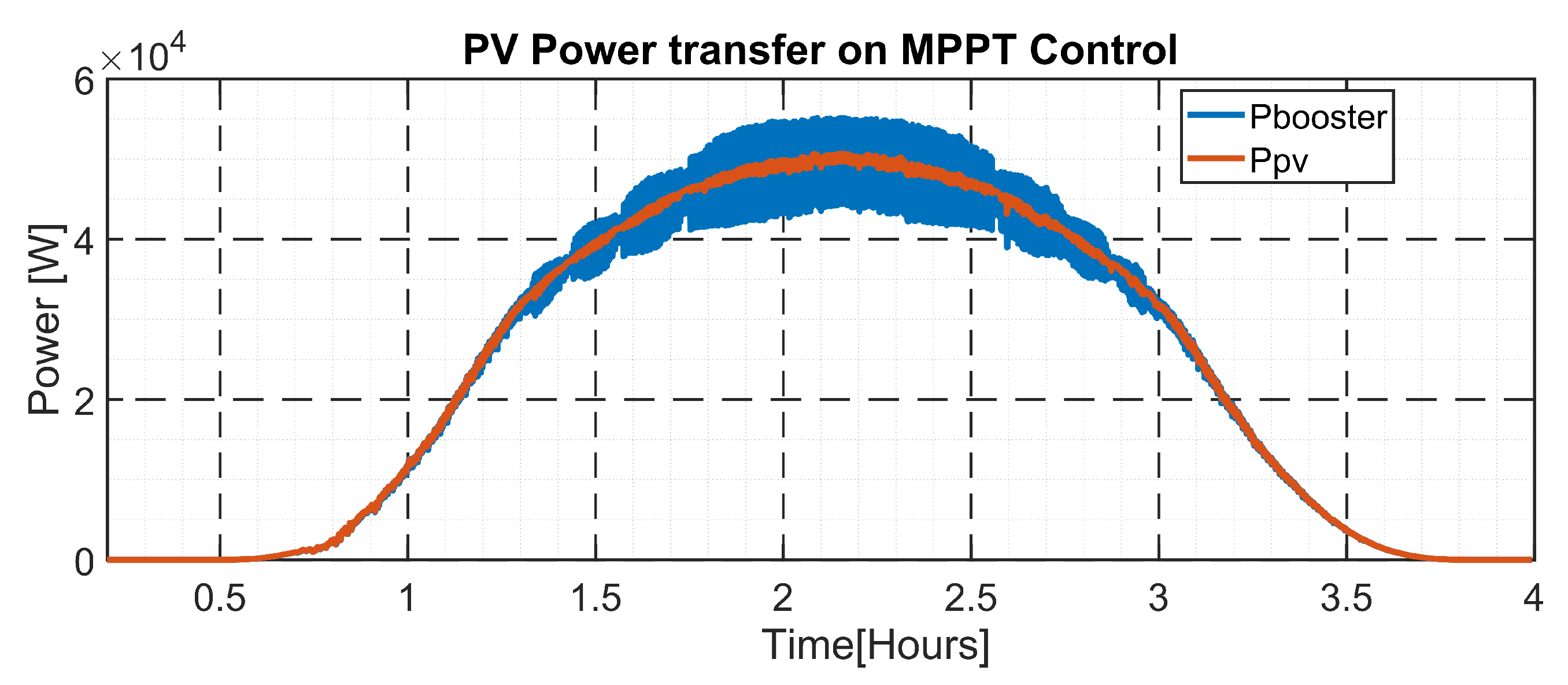
5.3.2. Solar Power Profile
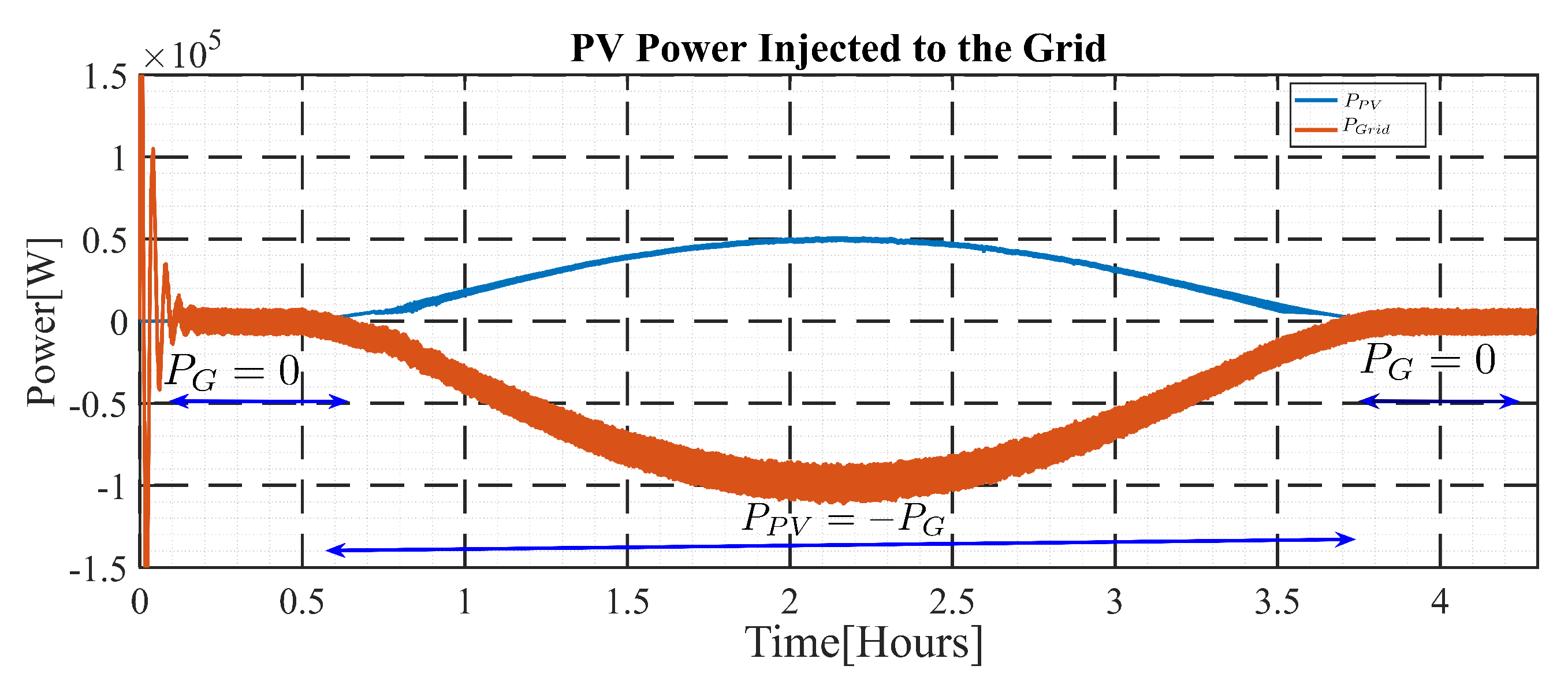
5.3.3. The Grid Behaviors due to Solar Power Injection
5.3.4. The Grid Profile without EV Integration
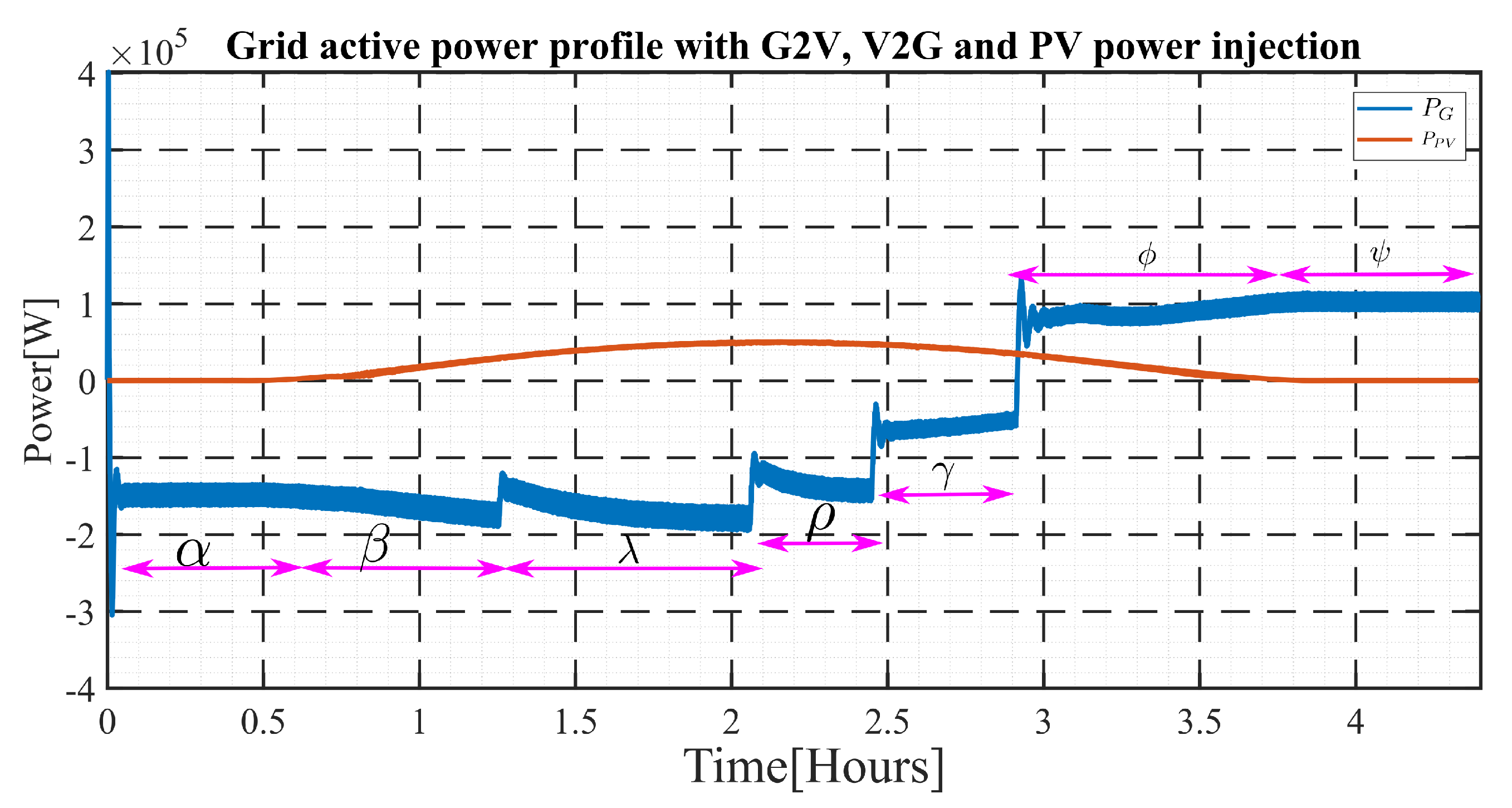
5.3.5. Grid Profile with EV Integration
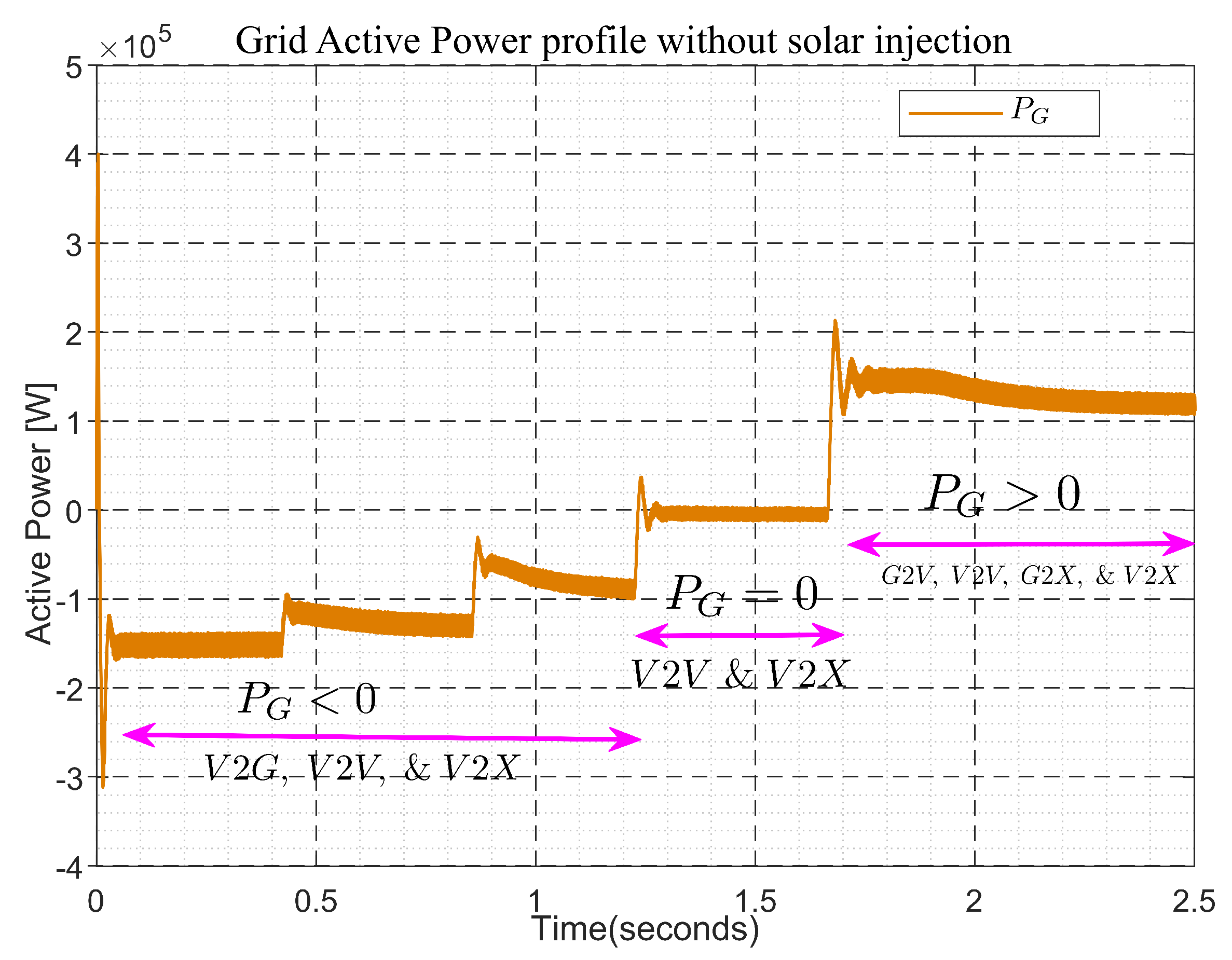
- 1.
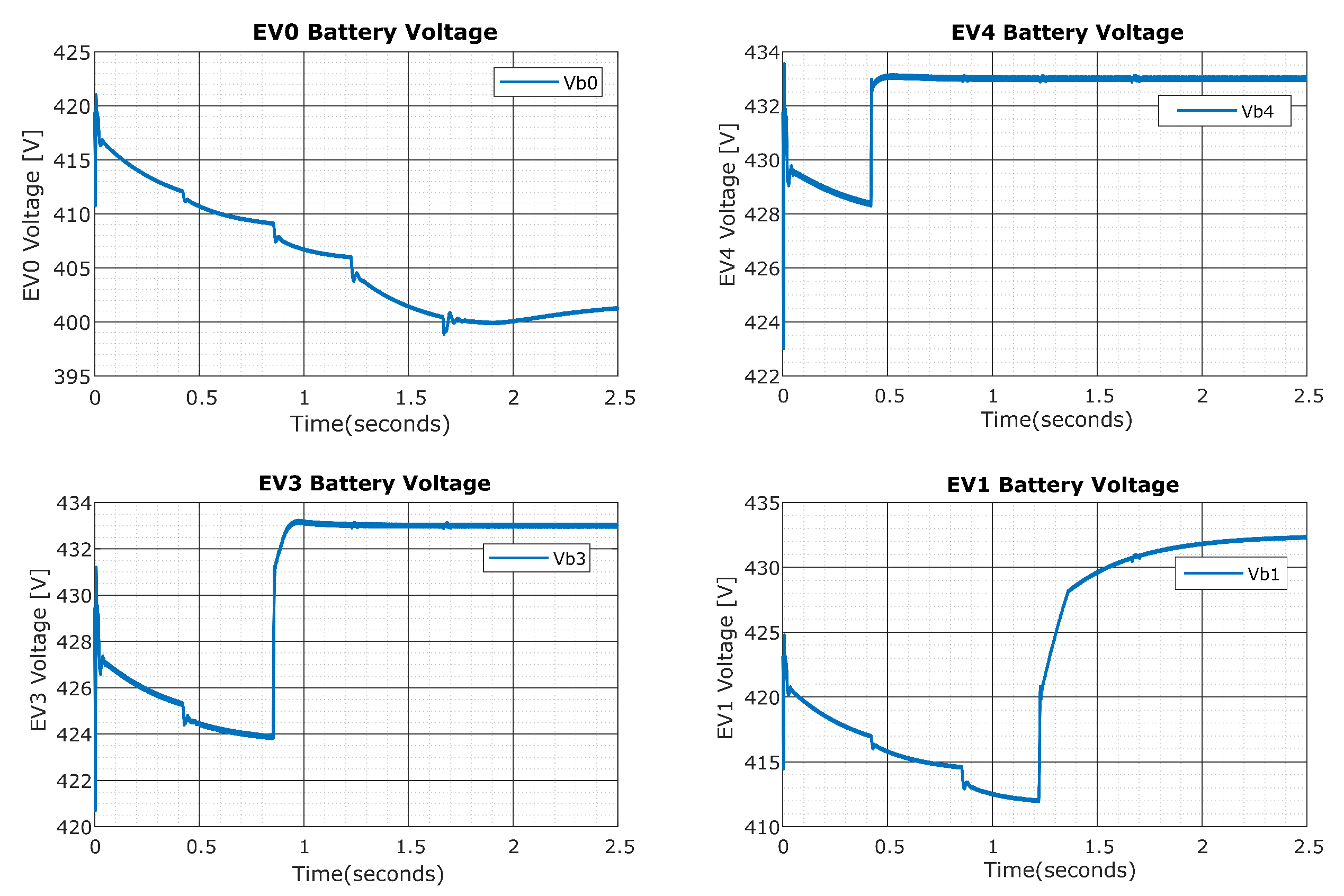
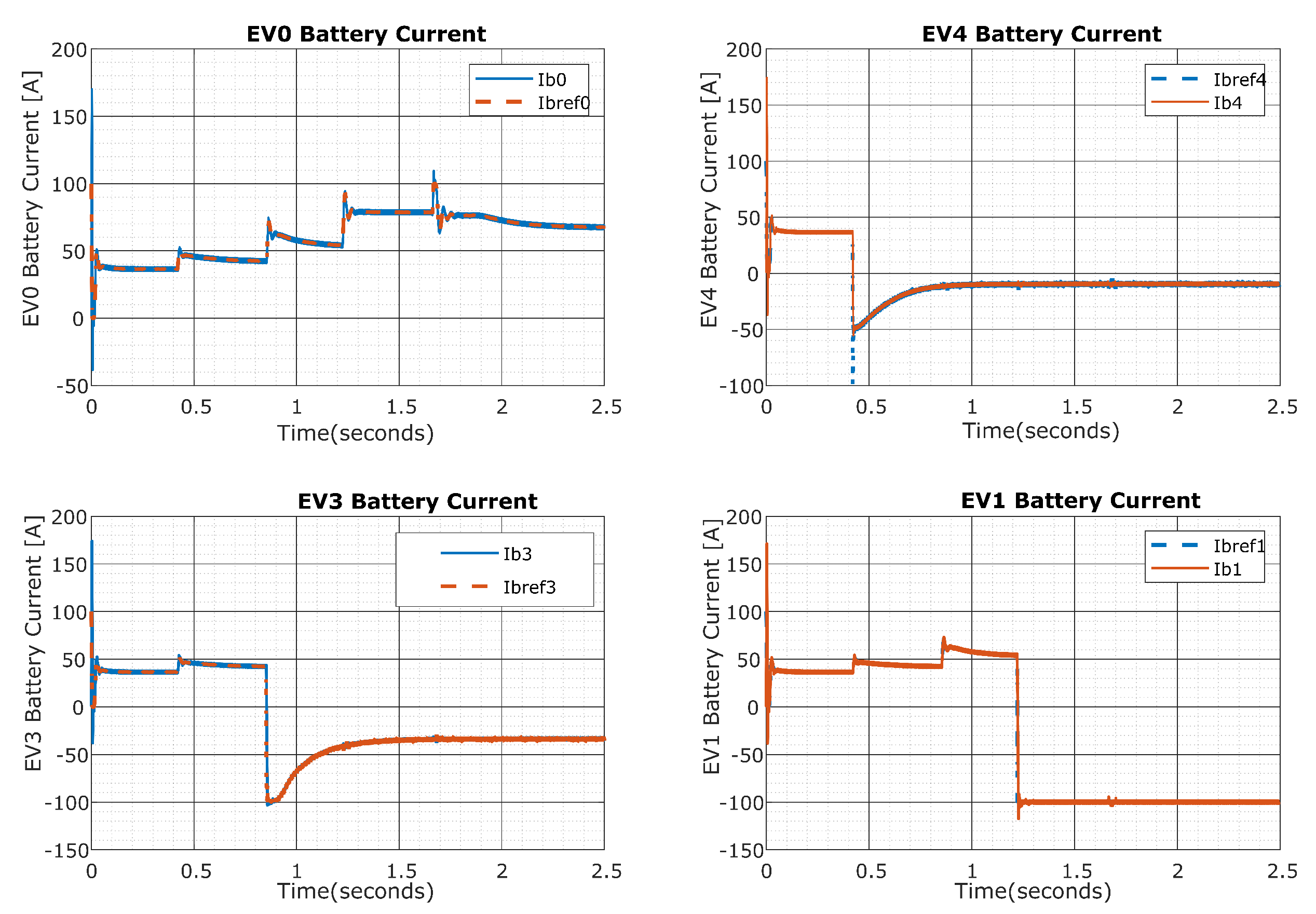
- The stands for a situation when the PV power system is connected to the grid, but not generating power. While the EVs ( are sending power to the grid. The mentioned case is demonstrated on the expression in Equation (10).As the grid is receiving power from the EVs, then this is the V2G scenario. Therefore, the grid active power is negative.
- 2.
- The stands for a situation where the solar system is connected to the grid, and starting to generate power; the EVs ( are sending power to the grid. The mentioned case is indicated on the expression in Equation (11).The grid is receiving power from both the EVs and PV power system, hence the grid power will be more negative.
- 3.
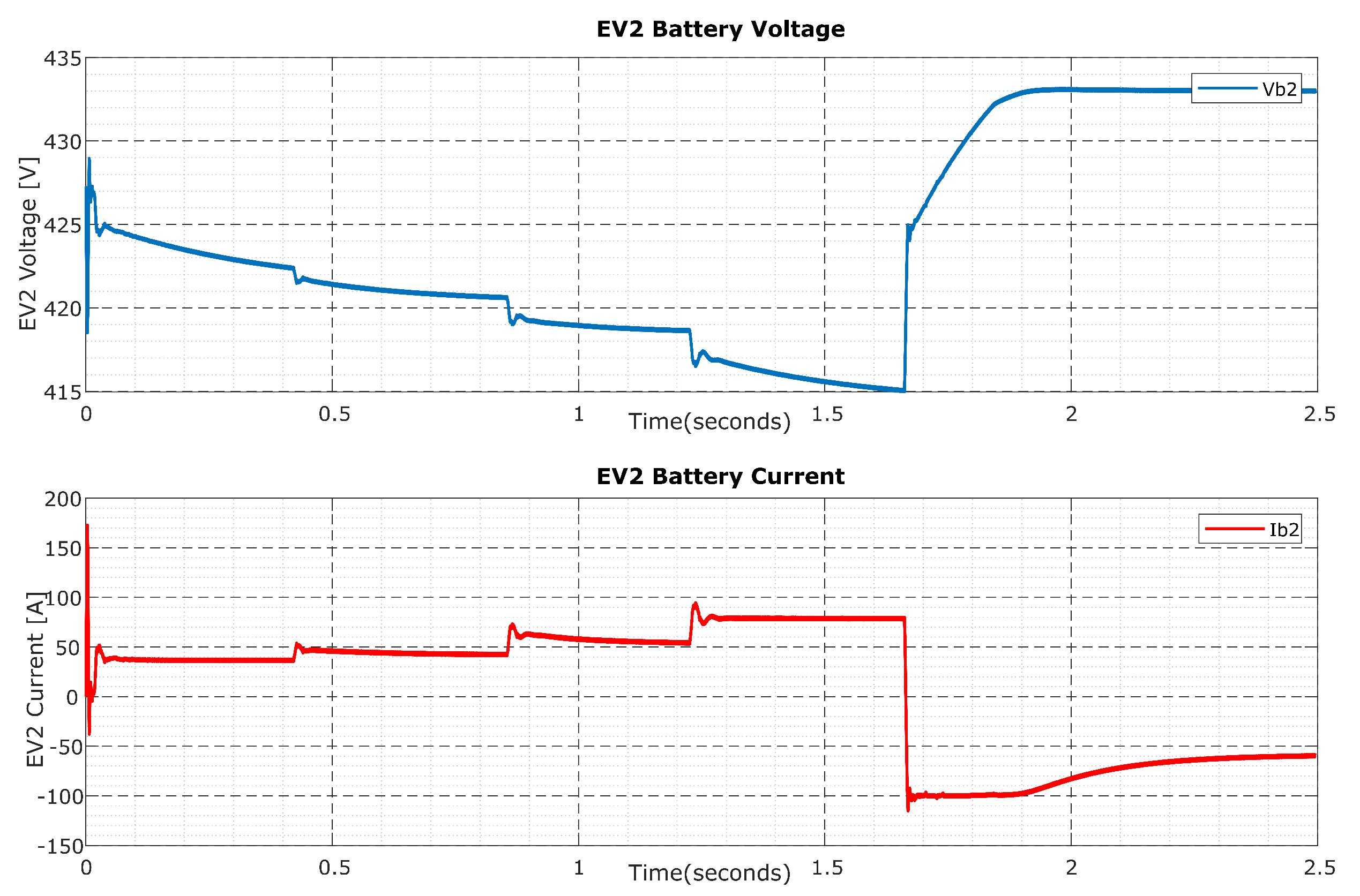
- The ; in this case the are sending power to the grid, while the started charging. The PV solar systems are connected to the grid and increasingly generating power. The mentioned case is indicated on the expression in Equation (12).The grid is receiving power from some of the EVs and PV power system and gives power to the rest of the EVs, hence the grid active power will start slightly to go positive.
- 4.
- The , in this case the , are sending power to the grid; while the started charging. The PV solar system is connected to the grid and generating maximum power. The illustrated case is shown on the expression in Equation (13).The grid is receiving power from some of the EVs and PV power system and gives power to the rest of the EVs, hence the grid active power will more and more go positive.
- 5.
- The , in this case the are sending power to the grid, while the started charging. The PV solar systems is connected to the grid and the generated power started decreasing. The illustrated case is shown on the expression in Equation (14).The grid is receiving power from some of the EVs and PV power system and gives power to the rest of the EVs, hence the grid active power will more and more go positive closer to zero. The grid almost starts to send power out instead of receiving.
- 6.
- The , in this case the are sending power to the grid, while the started charging. The PV solar system is connected to the grid and the generated power starts tending to zero. The illustrated case is shown on the expression in Equation (15).The grid is receiving power from some of the EV0 and PV power system (which is slightly tending to zero) and gives power to the rest of the EVs, hence the grid active power is positive. The grid starts to send power out instead of receiving and the support from the PV power system is almost off.
- 7.
- The , in this case the are sending power to the grid, while the starts charging. The PV solar system is connected to the grid and off. The illustrated case is shown on the expression in the Equation (16).The grid is receiving power from some of the EV0 and gives power to the rest of the EVs, hence the grid active power is positive. The PV power is connected, but its contribution is zero.
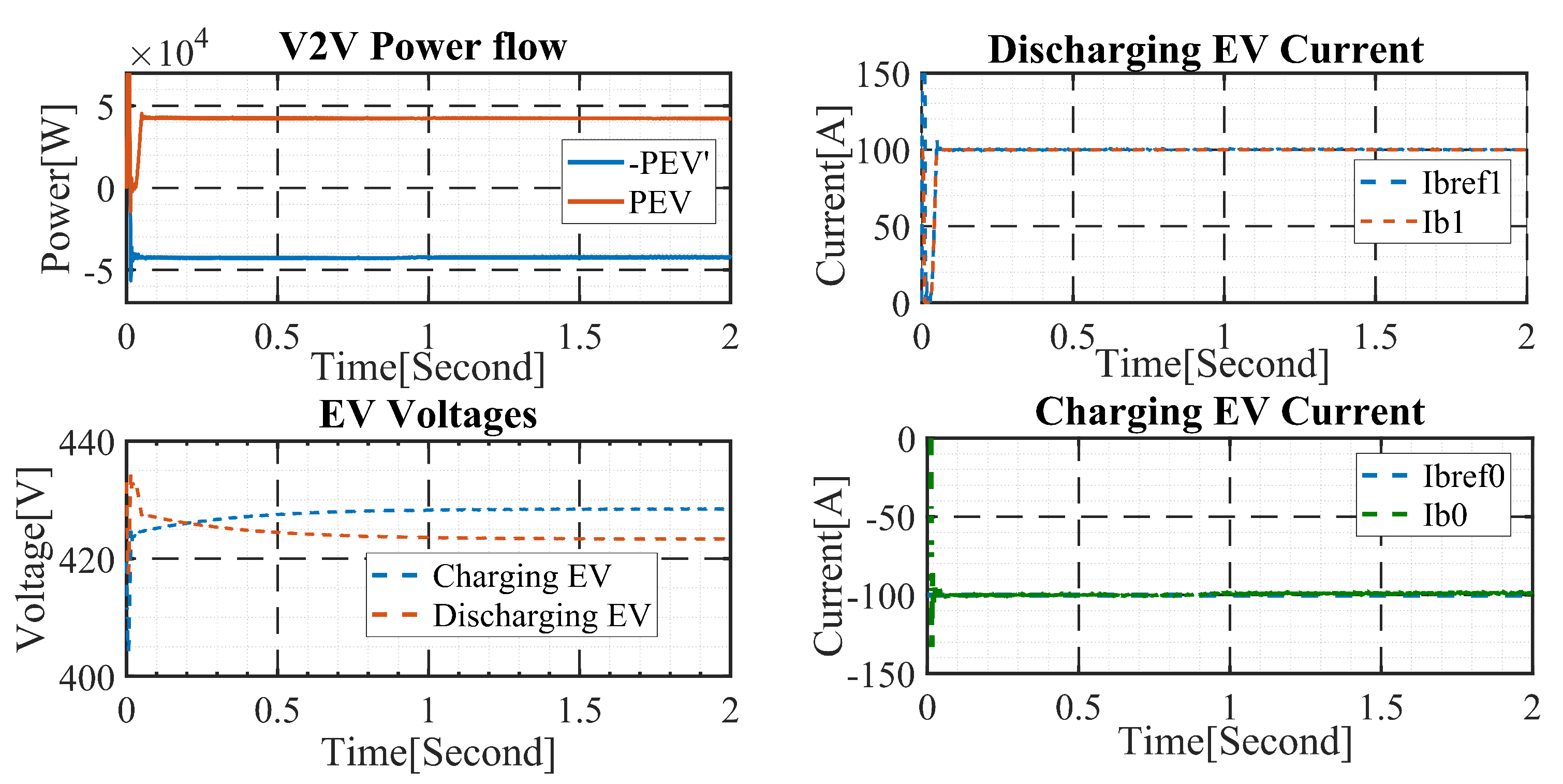
5.4. Simulation Results in Case of V2V
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| G2V | Grid to Vehicle |
| V2G | Vehicle to Grid |
| V2V | Vehicle to Vehicle |
| V2X | Vehicle to Load |
| EVs | Electric Vehicles |
References
- Ürge-Vorsatz, D.; Khosla, R.; Bernhardt, R.; Chan, Y.C.; Vérez, D.; Hu, S.; Cabeza, L.F. Advances toward a net-zero global building sector. Annu. Rev. Environ. Resour. 2020, 45, 227–269. [Google Scholar] [CrossRef]
- Vella, H. Ten Steps to net zero: As the goal to reach net zero in the UK rapidly approaches, we examine Boris Johnson’s 10-point plan for a green industrial revolution. Eng. Technol. 2021, 16, 20–25. [Google Scholar] [CrossRef]
- Abdou, N.; El Mghouchi, Y.; Hamdaoui, S.; Mhamed, M. Optimal Building Envelope Design and Renewable Energy Systems Size for Net-zero Energy Building in Tetouan (Morocco). In Proceedings of the 2021 9th International Renewable and Sustainable Energy Conference (IRSEC), Virtual, 23–27 November 2021; pp. 1–6. [Google Scholar]
- Kaloti, S.; Kamal, F.; Al Mamun, A.; Chowdhury, B. Is Achieving Net-Zero Carbon Emissions Possible for Electric Utilities with Current Technology? In Proceedings of the 2021 North American Power Symposium (NAPS), College Station, TX, USA, 14–16 November 2021; pp. 1–6. [Google Scholar]
- Arita, M.; Nakamura, Y.; Ishida, S.; Arakawa, Y. ZEL: Net-Zero-Energy Lifelogging System using Heterogeneous Energy Harvesters. In Proceedings of the 2022 IEEE International Conference on Pervasive Computing and Communications (PerCom), Pisa, Italy, 21–25 March 2022; pp. 172–179. [Google Scholar]
- Lowe, C.; Stanley, J.; Alosaimi, F.; Yousf, M.; Bordelon, J.; Karayaka, H.B. Load Following Capability for Hybrid Nuclear and Solar Photovoltaic Power Plants with an Energy Storage System. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar]
- Saw, S.K.; Navada, H.G.; Shubhanga, K.N. Power Flow Analysis of Power Distribution System Integrated with Solar Photovoltaic Based Distributed Generation. In Proceedings of the 2022 International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), Hyderabad, India, 21–23 July 2022; pp. 1–6. [Google Scholar]
- Boutasseta, N.; Bouakkaz, M.S.; Attoui, I.; Fergani, N.; Bouraiou, A.; Necaibia, A. Implementation of MPPT Methods for improving the Performance of Photovoltaic Systems. In Proceedings of the 2021 International Conference on Recent Advances in Mathematics and Informatics (ICRAMI), Tebessa, Algeria, 21–22 September 2021; pp. 1–4. [Google Scholar]
- Lian, H.; Hu, S.; Meng, Y. Research on Supporting Control Technology of Wind driven generator Auxiliary Power Grid Based on Energy Storage DC Access. In Proceedings of the 2021 International Conference on Advanced Electrical Equipment and Reliable Operation (AEERO), Beijing, China, 15–17 October 2021; pp. 1–4. [Google Scholar]
- Khatibi, M. Investigating the Impact of Wind Farms Energy Yields on Reduction of Power Plants Natural Gas Consumptions and CO2 Emissions: A Practical Case Study in Iran. In Proceedings of the 7th Iran Wind Energy Conference (IWEC2021), Shahrood, Iran, 17–18 May 2021; pp. 1–4. [Google Scholar]
- Malik, M.Z.; Baloch, M.H.; Ali, B.; Khahro, S.H.; Soomro, A.M.; Abbas, G.; Zhang, S. Power Supply to Local Communities Through Wind Energy Integration: An Opportunity Through China-Pakistan Economic Corridor (CPEC). IEEE Access 2021, 9, 66751–66768. [Google Scholar] [CrossRef]
- Abomazid, A.M.; El-Taweel, N.A.; Farag, H.E. Optimal energy management of hydrogen energy facility using integrated battery energy storage and solar photovoltaic systems. IEEE Trans. Sustain. Energy 2022, 13, 1457–1468. [Google Scholar] [CrossRef]
- Stoyanov, L. Modeling of Hybrid System with Photovoltaic Panels-Fuel cells Generation and Hydrogen Storage Using Electrolyzer. In Proceedings of the 2021 17th Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–4 July 2021; pp. 1–4. [Google Scholar]
- Li, Z.; Zhang, W.; Zhang, R.; Sun, H. Development of renewable energy multi-energy complementary hydrogen energy system (A Case Study in China): A review. Energy Explor. Exploit. 2020, 38, 2099–2127. [Google Scholar] [CrossRef]
- Salman, A.A.; Soon, C.F.; Salem, A.A.; Al-Sharai, A.A. Modelling Of Grid Connected Photovoltaic System. In Proceedings of the 2021 IEEE 19th Student Conference on Research and Development (SCOReD), Online, 23–25 November 2021; pp. 42–46. [Google Scholar]
- Chen, T.; Jin, Y.; Lv, H.; Yang, A.; Liu, M.; Chen, B.; Xie, Y.; Chen, Q. Applications of lithium-ion batteries in grid-scale energy storage systems. Trans. Tianjin Univ. 2020, 26, 208–217. [Google Scholar] [CrossRef] [Green Version]
- Heilmann, C.; Friedl, G. Factors influencing the economic success of grid-to-vehicle and vehicle-to-grid applications—A review and meta-analysis. Renew. Sustain. Energy Rev. 2021, 145, 111115. [Google Scholar] [CrossRef]
- Pinto, J.G.; Monteiro, V.; Gonçalves, H.; Exposto, B.; Pedrosa, D.; Couto, C.; Afonso, J.L. Bidirectional battery charger with grid-to-vehicle, vehicle-to-grid and vehicle-to-home technologies. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 5934–5939. [Google Scholar]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Acharjee, P.; Bhattacharya, A. Charging scheduling of electric vehicle incorporating grid-to-vehicle and vehicle-to-grid technology considering in smart grid. IEEE Trans. Ind. Appl. 2020, 57, 1688–1702. [Google Scholar] [CrossRef]
- Evode, R. Modeling of Electric Grid Behaviors having Electric Vehicle charging stations with G2V and V2G Possibilities. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, 7–8 October 2021; pp. 1–5. [Google Scholar]
- Tostado-Véliz, M.; Kamel, S.; Hasanien, H.M.; Arévalo, P.; Turky, R.A.; Jurado, F. A stochastic-interval model for optimal scheduling of PV-assisted multi-mode charging stations. Energy 2022, 253, 124219. [Google Scholar] [CrossRef]
- Goel, S.; Sharma, R.; Rathore, A.K. A review on barrier and challenges of electric vehicle in India and vehicle to grid optimisation. Transp. Eng. 2021, 4, 100057. [Google Scholar] [CrossRef]
- Engel, B.; Di Modica, G.L.; Gartner, J.; Pronobis, O.; Wussow, J. Technology and Challenges with Fleet Grid Integration. In Electric Vehicles in Shared Fleets: Mobility Management, Business Models, and Decision Support Systems; World Scientific: Singapore, 2022; pp. 31–50. [Google Scholar]
- Cui, S.; Liu, X.; Tian, D.; Zhang, Q.; Song, L. The construction and simulation of V2G system in micro-grid. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–4. [Google Scholar]
- Sahoo, B.; Routray, S.K.; Rout, P.K. AC, DC, and hybrid control strategies for smart microgrid application: A review. Int. Trans. Electr. Energy Syst. 2020, 31, e12683. [Google Scholar] [CrossRef]
- Uko, C.; Egbue, O.; Naidu, D.S. Economic Dispatch of a Smart Grid with Vehicle-to-Grid Integration. In Proceedings of the 2020 IEEE Green Technologies Conference (GreenTech), Oklahoma City, OK, USA, 1–3 April 2020; pp. 148–152. [Google Scholar]
- Kuruvilla, V.; Kumar, P.V.; Selvakumar, A.I. Challenges And Impacts of V2g Integration—A Review. In Proceedings of the 2022 8th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 25–26 March 2022; pp. 1938–1942. [Google Scholar] [CrossRef]
- Bimenyimana, S.; Asemota, G.N.; Li, L. The state of the power sector in Rwanda: A progressive sector with ambitious targets. Front. Energy Res. 2018, 6, 68. [Google Scholar] [CrossRef]
- Gohari, H.S.; Abbaszadeh, K. A novel controllable bidirectional switching-capacitor based Buck-Boost charger for EVs. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–6. [Google Scholar]
- Shakeel, F.M.; Malik, O.P. Vehicle-To-Grid Technology in a Micro-grid Using DC Fast Charging Architecture. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; pp. 1–4. [Google Scholar]
- Balakhontsev, A.; Beshta, O.; Boroday, V.; Khudolii, S.; Pirienko, S. A Review of Topologies of Quick Charging Stations for Electric Vehicles. In Proceedings of the 2021 IEEE International Conference on Modern Electrical and Energy Systems (MEES), Kremenchuk, Ukraine, 21–24 September 2021; pp. 1–4. [Google Scholar]
- Thanakam, T.; Kumsuwan, Y. A Novel On-Board Battery Charger Configuration Based on Nine-Switch Converter fed Open-End Winding AC Motor Drive for Plug-In Electric Vehicles. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 31 October–3 November 2021; pp. 988–991. [Google Scholar]
- Hwang, S.H.; Chen, Y.; Zhang, H.; Lee, K.Y.; Kim, D.H. Reconfigurable Hybrid Resonant Topology for Constant Current/Voltage Wireless Power Transfer of Electric Vehicles. Electronics 2020, 9, 1323. [Google Scholar] [CrossRef]
- Eidiani, M.; Ghavami, A. New network design for simultaneous use of electric vehicles, photovoltaic generators, wind farms and energy storage. In Proceedings of the 2022 9th Iranian Conference on Renewable Energy & Distributed Generation (ICREDG), Mashhad, Iran, 23–24 February 2022; pp. 1–5. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||
|---|---|---|
| Item | Value | Unit |
| Grid choke | ||
| R | 1 | |
| L | 500 | |
| 3 | ||
| 400 | ||
| 50 | ||
| For the Source | ||
| 100 | ||
| 40 | ||
| Weather conditions | ||
| Temp | 25 | |
| Irrad | 0 to 1 to 0 | |
| For Booster | ||
| 100 | ||
| 1.6 | ||
| 100 | ||
| Off-board charger | ||
| 5.76 | ||
| 5.6 | ||
| For EV battery | ||
| 400 | ||
| 80 | A | |
| EV | SOC | Sequence | Mode 1 | Mode 2 |
|---|---|---|---|---|
| EV0 | 15% | 5 | V2G | - |
| EV1 | 20% | 4 | V2G | G2V |
| EV2 | 30% | 3 | V2G | G2V |
| EV3 | 40% | 2 | V2G | G2V |
| EV4 | 60% | 1 | V2G | G2V |
| Load | - | 6 | Off | - |
| Module: User Defined Module | |
|---|---|
| Items | Values |
| Maximum Power [W] | 213.15 |
| Cells per Module (Ncells) | 60.00 |
| Open Circuit Voltage (VoC) [V] | 36.30 |
| Voltage at Max Power Point [V] | 29.00 |
| Current at Max Power Point [A] | 7.35 |
| Temperature Coeff. of VoC [%/°C] | −0.36099 |
| Temperature coeff. of Isc (%/°C) | 0.102 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rwamurangwa, E.; Gonzalez, J.D.; Butare, A. Integration of EV in the Grid Management: The Grid Behavior in Case of Simultaneous EV Charging-Discharging with the PV Solar Energy Injection. Electricity 2022, 3, 563-585. https://doi.org/10.3390/electricity3040028
Rwamurangwa E, Gonzalez JD, Butare A. Integration of EV in the Grid Management: The Grid Behavior in Case of Simultaneous EV Charging-Discharging with the PV Solar Energy Injection. Electricity. 2022; 3(4):563-585. https://doi.org/10.3390/electricity3040028
Chicago/Turabian StyleRwamurangwa, Evode, Juan Diaz Gonzalez, and Albert Butare. 2022. "Integration of EV in the Grid Management: The Grid Behavior in Case of Simultaneous EV Charging-Discharging with the PV Solar Energy Injection" Electricity 3, no. 4: 563-585. https://doi.org/10.3390/electricity3040028