
Machine Learning Gaussian Process Regression based Robust H-Infinity Controller Design for Solar PV System to Achieve High Performance and Guarantee Stability †

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling of Solar PV System
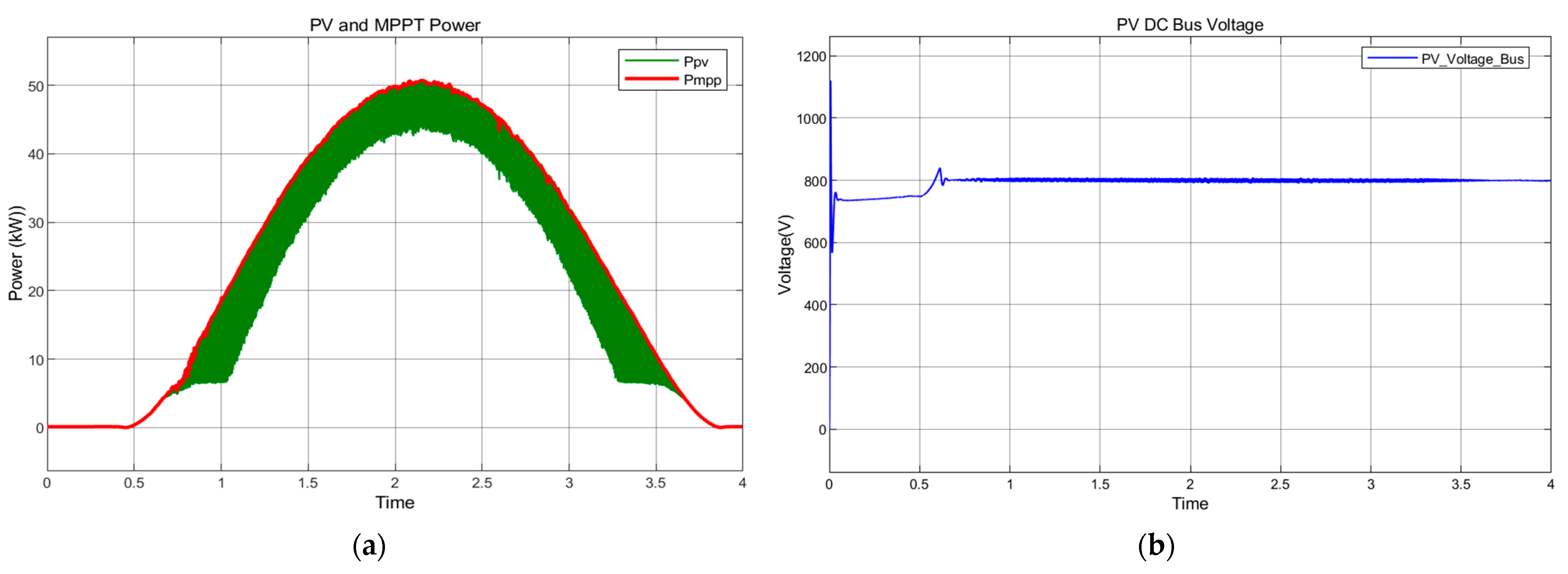
2.1. MPPT and MPC for the Solar PV System
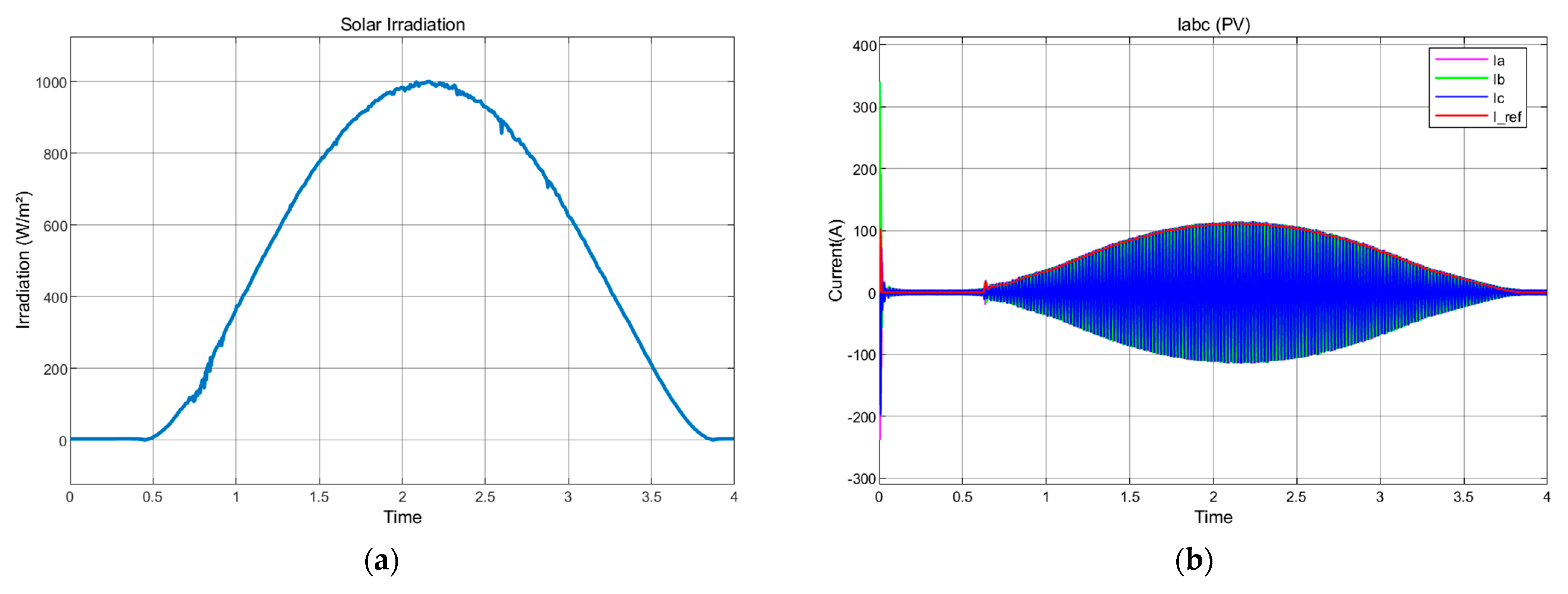
2.2. Solar I-V and P-V Characteristics
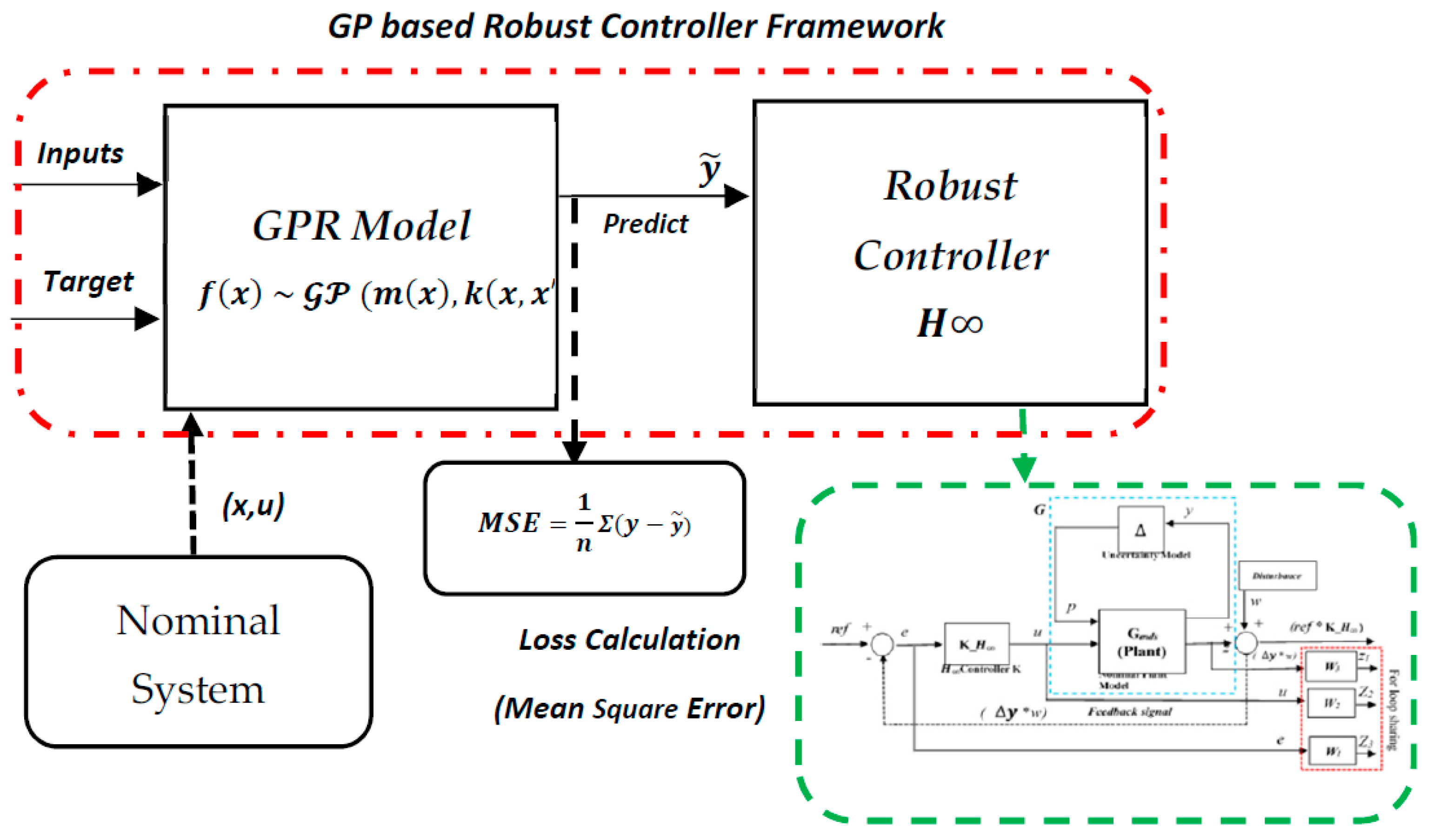
3. MLGPR based Robust H-infinity Controller Design
3.1. Machine Learning GPR Model
3.2. Robust H-Infinity Controller
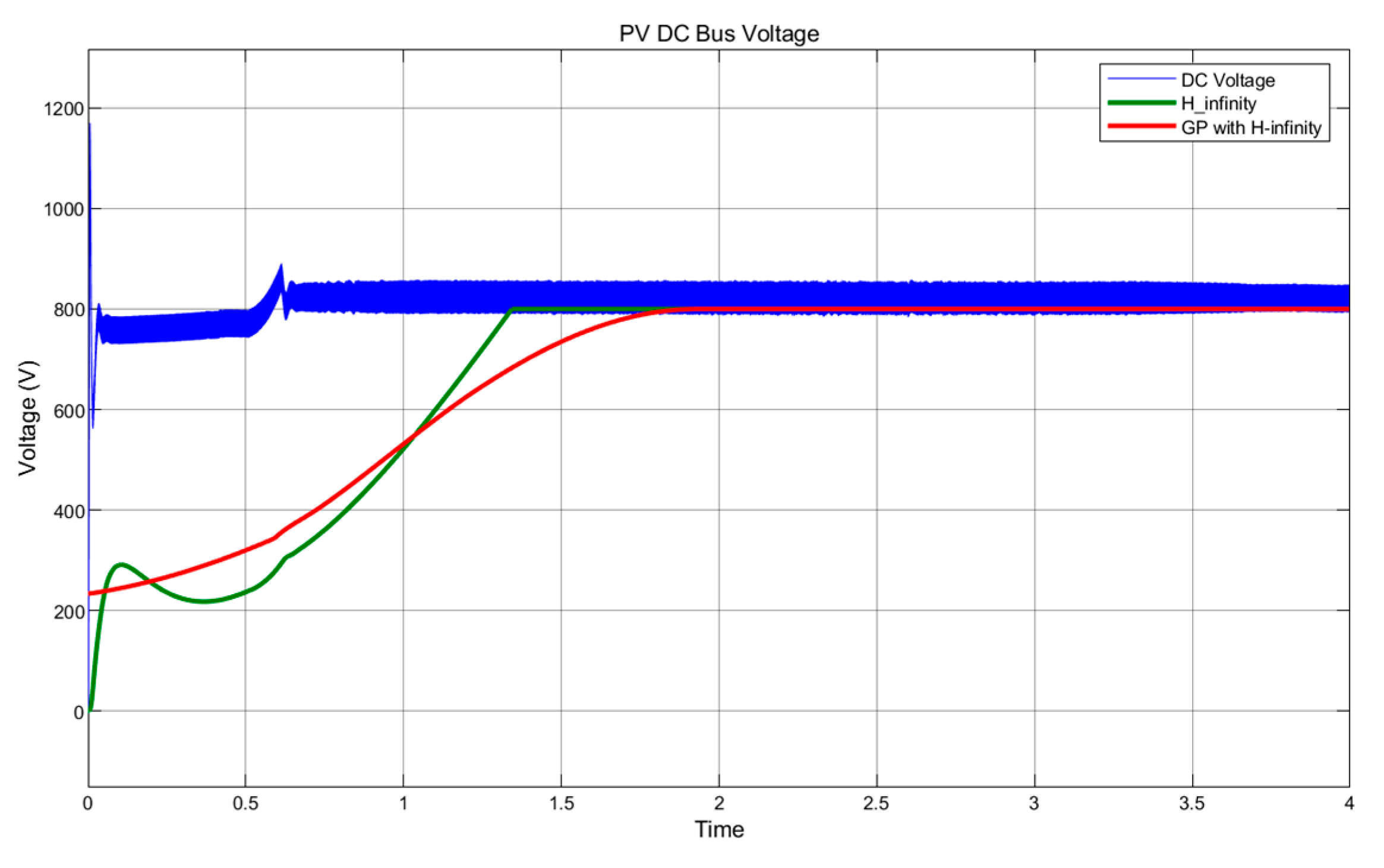
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nasr, M.A.; Nasr-Azadani, E. System performance in microgrids based hybrid PV systems. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar]
- Habib, H.U.R.; Wang, S.; Aziz, M.T. PV-Wind-Battery Based Standalone Microgrid System with MPPT for Green and Sustainable Future. In Proceedings of the 2019 9th International Conference on Power and Energy Systems (ICPES), Perth, WA, Australia, 10–12 December 2019. [Google Scholar]
- Berkenkamp, F.; Schoellig, A.P. Safe and robust learning control with Gaussian processes. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015. [Google Scholar]
- Muhtadi, A.; Saleque, A.M. Modeling and simulation of a microgrid consisting solar PV & DFIG based wind energy conversion system for St. Martin’s island. In Proceedings of the 2017 IEEE 3rd International Conference on Engineering Technologies and Social Sciences (ICETSS), Bangkok, Thailand, 7–8 August 2017. [Google Scholar]
- Güler, N.; Irmak, E. MPPT Based Model Predictive Control of Grid Connected Inverter for PV Systems. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019. [Google Scholar]
- Irmak, E.; Güler, N. A model predictive control-based hybrid MPPT method for boost converters. Int. J. Electron. 2020, 107, 1–16. [Google Scholar] [CrossRef]
- Williams, C.K.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2, pp. 7–22. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Se Pa, S.; Yakoob, M.B.; Maruthai, P.; Singaravelu, K.; Duraisamy, N.; Palaniappan, R.D.; Pithai, J.B. Machine Learning Gaussian Process Regression based Robust H-Infinity Controller Design for Solar PV System to Achieve High Performance and Guarantee Stability. Eng. Proc. 2022, 19, 26. https://doi.org/10.3390/ECP2022-12631
Se Pa S, Yakoob MB, Maruthai P, Singaravelu K, Duraisamy N, Palaniappan RD, Pithai JB. Machine Learning Gaussian Process Regression based Robust H-Infinity Controller Design for Solar PV System to Achieve High Performance and Guarantee Stability. Engineering Proceedings. 2022; 19(1):26. https://doi.org/10.3390/ECP2022-12631
Chicago/Turabian StyleSe Pa, Sureshraj, Mohamed Badcha Yakoob, Priya Maruthai, Karthikeyan Singaravelu, Nalini Duraisamy, Rathi Devi Palaniappan, and John Britto Pithai. 2022. "Machine Learning Gaussian Process Regression based Robust H-Infinity Controller Design for Solar PV System to Achieve High Performance and Guarantee Stability" Engineering Proceedings 19, no. 1: 26. https://doi.org/10.3390/ECP2022-12631