
Offset Well Design Optimization Using a Surrogate Model and Metaheuristic Algorithms: A Bakken Case Study


Abstract
:1. Introduction
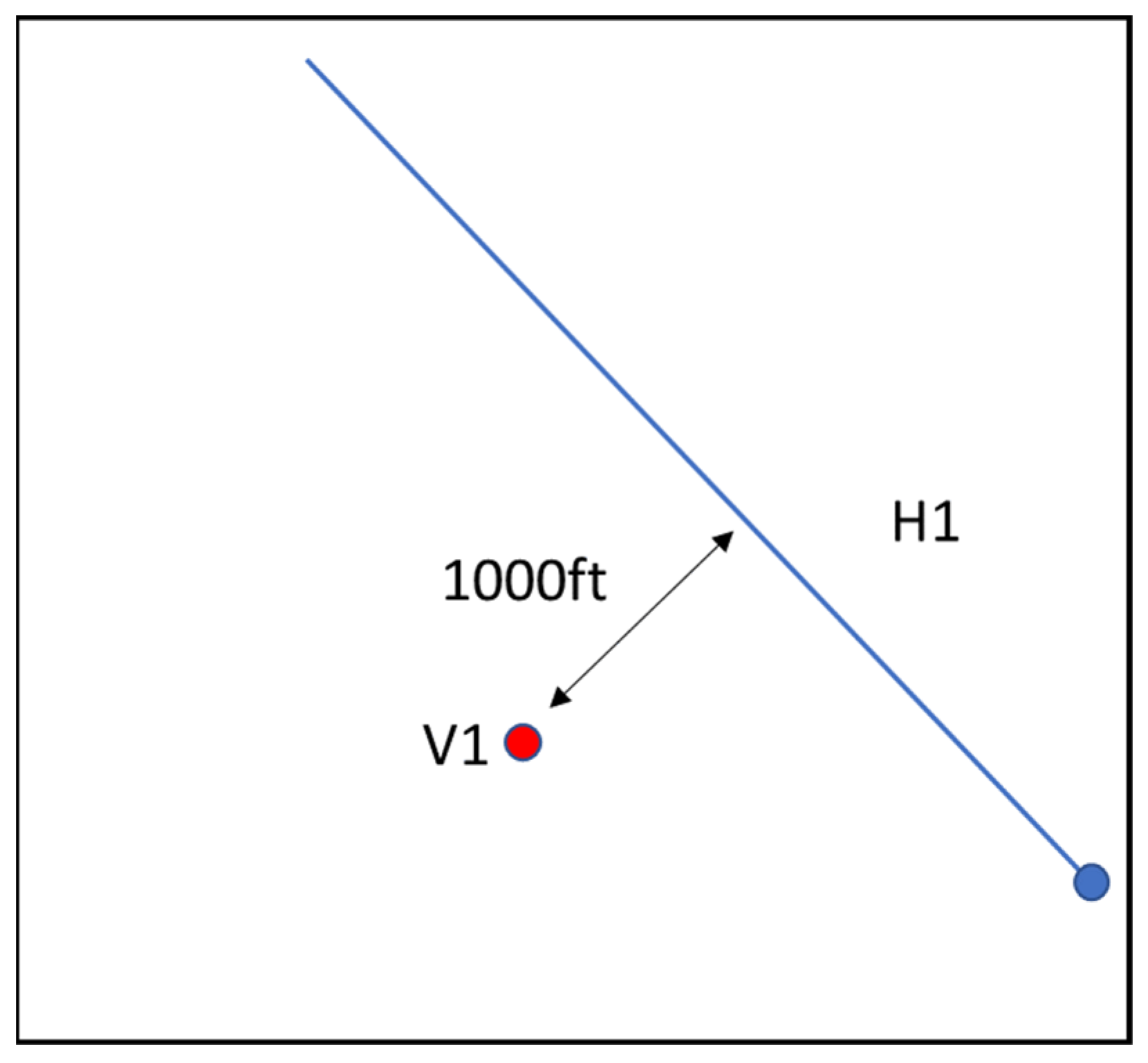
2. Problem Statement
3. Numerical Modeling
- A fracture grid size of 80 ft was used. This value is acceptable for the range of application of the fracture propagation algorithm [35];
- A geomodel with 5635 ft height, 15,000 ft length, and 1280 ft height was built;
- A logarithmic grid length in the Shmax direction was used to account for the sensitivity analysis fracture geometry.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formation | Permeability | Porosity | Water Saturation |
|---|---|---|---|
| MB1 | 0.004 | 6.5 | 42 |
| MB2 | 0.0026 | 7 | 36 |
| MB3 | 0.0026 | 5.5 | 42 |
| MB4 | 0.001 | 5.5 | 40 |
| TF | 0.0015 | 5 | 40 |


4. Optimization Formulation
- : Injected volume per cluster;
- : Number of clusters per stage;
- : Cluster spacing;
- : Well spacing;
- : Oil price;
- : Fracture volume price per barrel;
- : Total clusters number;
- : Non-productive time cost (time between stages);
- : Stages number.
4.1. Grey Wolf Optimization Algorithm
- Generate a random set of solutions (can be bounded) to represent the location of wolves in the solution space;
- Evaluate the locations according to the cost function (NPV for this work);
- Rank the solutions and assign them according to the hierarchy of the wolves α, β, δ, and the rest of the solutions to γ;
- Update the location of the wolves according to the best solution (assumed to be alpha);
- Repeat the process until the maximum number of iterations is reached.
4.2. Particle Swarm Optimization Algorithm
- Cognitive: serves as the memory of the particle; ensures that the particle moves towards the best values; and limits the step size in the search and convergence process;
- Social: determines the step size while converging to the swarm’s best solution;
- Inertia: control the speed of convergence and encourage exploration of new solutions.
- Initialize the PSO parameters;
- Generate primary swarm positions;
- Evaluate the fitness of each position using the objective function (NPV);
- Record the best position for each particle along with the global best particle;
- Update the position and the velocity of the particles until the maximum number of iterations is reached.
5. Sensitivity Analysis
- Offset well by cumulative production normalized by length;
- Primary well cumulative production uplift normalized by length.
6. Results and Discussion
- Oil price USD 80;
- Slurry price USD 100/bbl;
- The cost of adding a new stage USD 2000.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Alexeyev, A.; Ostadhassan, M.; Bubach, B.; Boualam, A.; Djezzar, S. Integrated Reservoir Characterization of the Middle Bakken in the Blue Buttes Field, Williston Basin, North Dakota. In Proceedings of the SPE Western Regional Meeting, Bakersfield, CA, USA, 23–27 April 2017. [Google Scholar] [CrossRef]
- Ouadi, H.; Mishani, S.; Rasouli, V. Applications of Underbalanced Fishbone Drilling for Improved Applications of Under-balanced Fishbone Drilling for Improved Recovery and Reduced Carbon Footprint in Unconventional Plays Recovery and Reduced Carbon Footprint in Unconventional Plays. Pet. Petrochem. Eng. J. 2023, 7, 000331. [Google Scholar] [CrossRef]
- Ajani, A.; Kelkar, M. Interference study in shale plays. In Proceedings of the Society of Petroleum Engineers—SPE Hydraulic Fracturing Technology Conference 2012, The Woodlands, TX, USA, 6–8 February 2012; pp. 36–50. [Google Scholar] [CrossRef]
- Daneshy, A.; Au-Yeung, J.; Thompson, T.; Tymko, D. Fracture shadowing: A direct method for determining of the reach and propagation pattern of hydraulic fractures in horizontal wells. Soc. Pet. Eng.–SPE Hydraul. Fract. Technol. Conf. 2012, 2012, 215–223. [Google Scholar] [CrossRef]
- Gupta, I.; Rai, C.; Devegowda, D.; Sondergeld, C.H. Fracture hits in unconventional reservoirs: A critical review. SPE J. 2021, 26, 412–434. [Google Scholar] [CrossRef]
- Cozby, J.; Sharma, M. Parent-Child Well Relationships across US Unconventional Basins: Learnings from a Data Analytics Study. In Proceedings of the SPE Hydraulic Fracturing Technology Conference and Exhibition, The Woodlands, TX, USA, 2 February 2022. [Google Scholar] [CrossRef]
- Miller, G.; Lindsay, G.; Baihly, J.; Xu, T. Parent well refracturing: Economic safety nets in an uneconomic market. In Proceedings of the Society of Petroleum Engineers—SPE Low Perm Symposium, Denver, CO, USA, 5–6 May 2016. [Google Scholar] [CrossRef]
- Xu, T.; Lindsay, G.; Zheng, W.; Yan, Q.; Patron, K.E.; Alimahomed, F.; Panjaitan, M.L.; Malpani, R. Advanced modeling of production induced pressure depletion and well spacing impact on infill wells in spraberry, Permian basin. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dallas, TX, USA, 24–26 September 2018. [Google Scholar] [CrossRef]
- Fowler, G.; McClure, M.; Cipolla, C. Making sense out of a complicated parent/child well dataset: A bakken case study. In Proceedings of the SPE Annual Technical Conference and Exhibition, Virtual, 26–29 October 2020; pp. 1–17. [Google Scholar] [CrossRef]
- Gala, D.P.; Manchanda, R.; Sharma, M.M. Modeling of fluid injection in depleted parent wells to minimize damage due to frac-hits. In Proceedings of the SPE/AAPG/SEG Unconventional Resources Technology Conference, Houston, TX, USA, 23–25 July 2018; pp. 1–14. [Google Scholar] [CrossRef]
- Manchanda, R.; Bhardwaj, P.; Hwang, J.; Sharma, M.M. Parent-child fracture interference: Explanation and mitigation of child well underperformance. In Proceedings of the Society of Petroleum Engineers—SPE Hydraulic Fracturing Technology Conference and Exhibition 2018, HFTC 2018, The Woodlands, TX, USA, 23–25 January 2018. [Google Scholar] [CrossRef]
- Merzoug, A.; Chellal, H.A.K.; Brinkerhoff, R.; Rasouli, V.; Olaoye, O. Parent-Child Well Interaction in Multi-Stage Hydraulic Fracturing: A Bakken Case Study. In Proceedings of the 56th U.S. Rock Mechanics/Geomechanics Symposium, Santa Fe, NM, USA, 26–29 June 2022. [Google Scholar] [CrossRef]
- Ratcliff, D.; McClure, M.; Fowler, G.; Elliot, B.; Qualls, A. Modelling of Parent Child Well Interactions. In Proceedings of the SPE Hydraulic Fracturing Technology Conference and Exhibition, The Woodlands, TX, USA, 1–3 February 2022. [Google Scholar] [CrossRef]
- Kumar, D.; Ghassemi, A.; Riley, S.; Elliott, B. Geomechanical analysis of frac-hits using a 3D poroelastic hydraulic fracture model. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dallas, TX, USA, 25–26 September 2018. [Google Scholar] [CrossRef]
- Rezaei, A.; Dindoruk, B.; Soliman, M.Y. On parameters affecting the propagation of hydraulic fractures from infill wells. J. Pet. Sci. Eng. 2019, 182, 106255. [Google Scholar] [CrossRef]
- Cipolla, C.; Litvak, M.; Prasad, R.S.; McClure, M. Case history of drainage mapping and effective fracture length in the Bakken. In Proceedings of the Society of Petroleum Engineers—SPE Hydraulic Fracturing Technology Conference and Exhibition 2020, HFTC 2020, The Woodlands, TX, USA, 4 February 2020; pp. 1–43. [Google Scholar] [CrossRef]
- Morsy, S.; Menconi, M.; Liang, B. Unconventional Optimized Development Strategy Workflow. In Proceedings of the Unconventional Optimized Development Strategy Workflow, Virtual, 21 April 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Cai, Y.; Taleghani, A.D. Toward controllable infill completions using frac-driven interactions FDI data. In Proceedings of the SPE Annual Technical Conference and Exhibition, Virtual, 26–29 October 2021. [Google Scholar] [CrossRef]
- Daneshy, A. Fra-Driven Interactions (FDI) Guides for Real-Time Analysis & Execution of Fracturing Treatment; Daneshy Consultants Int’l: Houston, TX, USA, 2020. [Google Scholar]
- Yu, W.; Sepehrnoori, K. Optimization of Multiple Hydraulically Fractured Horizontal Wells in Unconventional Gas Reservoirs. J. Pet. Eng. 2013, 2013, 151898. [Google Scholar] [CrossRef]
- Ma, X.; Gildin, E.; Plaksina, T. Efficient optimization framework for integrated placement of horizontal wells and hydraulic fracture stages in unconventional gas reservoirs. J. Unconv. Oil Gas Resour. 2015, 9, 1–17. [Google Scholar] [CrossRef]
- Plaksina, T.; Gildin, E. Journal of Natural Gas Science and Engineering Practical handling of multiple objectives using evolutionary strategy for optimal placement of hydraulic fracture stages in unconventional gas reservoirs. J. Nat. Gas Sci. Eng. 2015, 27, 443–451. [Google Scholar] [CrossRef]
- Rahmanifard, H.; Plaksina, T. Application of fast analytical approach and AI optimization techniques to hydraulic fracture stage placement in shale gas reservoirs. J. Nat. Gas Sci. Eng. 2018, 52, 367–378. [Google Scholar] [CrossRef]
- Cipolla, C.; Gilbert, C.; Sharma, A.; LeBas, J. Case history of completion optimization in the Utica. In Proceedings of the Society of Petroleum Engineers—SPE Hydraulic Fracturing Technology Conference and Exhibition 2018, HFTC 2018, The Woodlands, TX, USA, 23–25 January 2018. [Google Scholar] [CrossRef]
- Kim, K.; Choe, J. Hydraulic Fracture Design with a Proxy Model for Unconventional Shale Gas Reservoir with Considering Feasibility Study. Energies 2019, 12, 220. [Google Scholar] [CrossRef]
- Wang, J.; Olson, J.E. Auto-Optimization of Hydraulic Fracturing Design with Three-Dimensional Fracture Propagation in Naturally Fractured Multi-Layer Formations. In Proceedings of the Unconventional Resources Technology Conference, Virtual, 20–22 July 2020. [Google Scholar] [CrossRef]
- Garcia Ferrer, G.; Faskhoodi, M.; Zhmodik, A.; Li, Q.; Mukisa, H. Completion Optimization of Child Wells in a Depleted Environment, a Duvernay Example. In Proceedings of the Completion Optimization of Child Wells in a Depleted Environment, a Duvernay Example, Virtual, 30 September 2020. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Z.; Chen, S.; Hui, G.; Kong, B. Production forecast and optimization for parent-child well pattern in un-conventional reservoirs. J. Pet. Sci. Eng. 2021, 203, 108899. [Google Scholar] [CrossRef]
- Kang, C.A.; McClure, M.W.; Reddy, S.; Naidenova, M.; Tyankov, Z. Optimizing Shale Economics with an Integrated Hydraulic Fracturing and Reservoir Simulator and a Bayesian Automated History Matching and Optimization Algorithm. In Proceedings of the Optimizing Shale Economics with an Integrated Hydraulic Fracturing and Reservoir Simulator and a Bayesian Automated History Matching and Optimization Algorithm, The Woodlands, TX, USA, 1–3 February 2022. [Google Scholar] [CrossRef]
- Pudugramam, S.; Irvin, R.J.; McClure, M.; Fowler, G.; Bessa, F.; Zhao, Y.; Han, J.; Li, H.; Kohli, A.; Zoback, M.D. Optimizing Well Spacing and Completion Design Using Simulation Models Calibrated to the Hydraulic Fracture Test Site 2 (HFTS-2) Dataset. In Proceedings of the 10th Unconventional Resources Technology Conference, Houston, TX, USA, 20–22 June 2022. [Google Scholar] [CrossRef]
- Dohmen, T.; Zhang, J.; Li, C.; Blangy, J.P.; Simon, K.M.; Valleau, D.N.; Ewles, J.D.; Morton, S.; Checkles, S. A new surveil-lance method for delineation of depletion using microseismic and its application to development of unconventional reservoirs. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 30 September–2 October 2013; Volume 3, pp. 2373–2386. [Google Scholar] [CrossRef]
- Boualam, A.; Rasouli, V.; Dalkhaa, C.; Djezzar, S. Advanced petrophysical analysis and water saturation prediction in three forks, williston basin. In Proceedings of the SPWLA 61st Annual Logging Symposium, Virtual Online Webinar, 24 June–29 July 2020. [Google Scholar] [CrossRef]
- Sennaoui, B.; Pu, H.; Afari, S.; Malki, M.L.; Kolawole, O. Pore-and Core-Scale Mechanisms Controlling Supercritical Cyclic Gas Utilization for Enhanced Recovery under Immiscible and Miscible Conditions in the Three Forks Formation. Energy Fuels 2013, 37, 459–476. [Google Scholar] [CrossRef]
- Cho, Y.; Uzun, I.; Eker, E.; Yin, X.; Kazemi, H. Water and Oil Relative Permeability of Middle Bakken Formation: Experiments and Numerical Modeling. In Proceedings of the 4th Unconventional Resources Technology Conference, Houston, TX, USA, 1–3 August 2016. [Google Scholar] [CrossRef]
- Dontsov, E.V. A Continuous Fracture Front Tracking Algorithm with Multi Layer Tip Elements (MuLTipEl) for a Plane Strain Hydraulic Fracture. J. Pet. Sci. Eng. 2021, 217, 110841. [Google Scholar] [CrossRef]
- Daneshy, A. Use of FDI data for comprehensive evaluation of horizontal well frac treatments. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, United Arab Emirates, 21–23 September 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Espinoza, N. Introduction to Energy Geomechanics; DN Espinoza: 2021. Available online: https://dnicolasespinoza.github.io/IPG.html (accessed on 6 November 2022).
- Cipolla, C.; Wolters, J.; McKimmy, M.; Miranda, C.; Hari-Roy, S.; Kechemir, A.; Gupta, N. Observation Lateral Project: Direct Measurement of Far-Field Drainage. In Proceedings of the Observation Lateral Project: Direct Measurement of Far-Field Drainage, The Woodlands, TX, USA, 25 January 2022. [Google Scholar] [CrossRef]
- Naghizadeh, A.; Larestani, A.; Nait Amar, M.; Hemmati-Sarapardeh, A. Predicting viscosity of CO2–N2 gaseous mixtures using advanced intelligent schemes. J. Pet. Sci. Eng. 2022, 208, 109359. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Nait Amar, M.; Jahanbani Ghahfarokhi, A.; Ng, C.S.W.; Zeraibi, N. Optimization of WAG in real geological field using rigorous soft computing techniques and nature-inspired algorithms. J. Pet. Sci. Eng. 2021, 206, 109038. [Google Scholar] [CrossRef]
- Xu, C.; Nait Amar, M.; Ghriga, M.A.; Ouaer, H.; Zhang, X.; Hasanipanah, M. Evolving support vector regression using Grey Wolf optimization; forecasting the geomechanical properties of rock. Eng. Comput. 2020, 38, 1819–1833. [Google Scholar] [CrossRef]
- Ouadi, H.; Laalam, A.; Hassan, A.; Chemmakh, A.; Rasouli, V.; Mahmoud, M. Design and Performance Analysis of Dry Gas Fishbone Wells for Lower Carbon Footprint. Fuels 2023, 4, 92–110. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. Proc. ICNN’95 Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar] [CrossRef]
- Nait Amar, M.; Zeraibi, N.; Redouane, K. Bottom hole pressure estimation using hybridization neural networks and grey wolves optimization. Petroleum 2018, 4, 419–429. [Google Scholar] [CrossRef]
- Cardoso Braga, D.; Kamyab, M.; Joshi, D.; Harclerode, B.; Cheatham, C. Using Particle Swarm Optimization to Compute Hundreds of Possible Directional Paths to Get Back/Stay in the Drilling Window. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, United Arab Emirates, 23 September 2021. [Google Scholar] [CrossRef]
- Gaikwad, G.; Ahire, P. Oil Field Optimization Using Particle Swarm Optimization. In Proceedings of the 2019 5th International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 19–21 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239. [Google Scholar] [CrossRef]
- Sobol’, I.M. On the distribution of points in a cube and the approximate evaluation of integrals. USSR Comput. Math. Math. Phys. 1967, 7, 86–112. [Google Scholar] [CrossRef]
- Ng, C.S.W.; Jahanbani Ghahfarokhi, A.; Nait Amar, M. Production optimization under waterflooding with Long Short-Term Memory and metaheuristic algorithm. Petroleum 2022, 9, 53–60. [Google Scholar] [CrossRef]
- McClure, M.; Kang, C.; Medam, S.; Hewson, C. ResFrac Technical Writeup. arXiv 2018, arXiv:1804.02092. [Google Scholar]
- Hanisch, L. SwarmLib. Available online: https://github.com/aimacode/aima-python/graphs/contributors (accessed on 8 October 2022).
- Miranda, L.J.V.; Moser, A.; Cronin, S.K. PySwarms, Version 1.3.0. 2017. Available online: https://github.com/ljvmiranda921/pyswarms (accessed on 8 December 2022).
- Chellal, H.A.K.; Merzoug, A.; Rasouli, V.; Brinkerhoff, R. Effect of Rock Elastic Anisotropy on Hydraulic Fracture Containment in the Bakken Formation. In Proceedings of the 56th U.S. Rock Mechanics/Geomechanics Symposium, Santa Fe, NM, USA, 26–29 June 2022. [Google Scholar] [CrossRef]
- Zoback, M.D. Reservoir Geomechanics; Cambridge University Press: Cambridge, UK, 2007; Volume 53. [Google Scholar] [CrossRef]
- Dohmen, T.; Zhang, J.; Barker, L.; Blangy, J.P. Microseismic magnitudes and b-values for delineating hydraulic fracturing and depletion. SPE J. 2017, 22, 1624–1634. [Google Scholar] [CrossRef]









| Bakken | Eagle Ford | Haynesville | Woodford | Niobrara | |
|---|---|---|---|---|---|
| Positive | 50% | 24% | 58% | 4% | 6% |
| No Change | 35% | 36% | 24% | 4% | 38% |
| Negative | 15% | 41% | 19% | 64% | 56% |
| Production/Testing Event | Start Date | End Date |
|---|---|---|
| Hydraulic Fracturing Treatment in H1 | 29 September 2005 | 29 September 2005 |
| H1 Primary Production | 29 September 2005 | 8 October 2016 |
| Shut-in H1 | 8 October 2016 | 5 January 2017 |
| V1 DFIT #1 | 7 November 2016 | 7 November 2016 |
| H1 MDD | 9 December 2016 | 11 December 2016 |
| V1 Fracture Stimulation | 11 December 2016 | 11 December 2016 |
| H1 Back to Production | 5 January 2017 | 3 May 2017 |
| Parameter | Unit | Range |
|---|---|---|
| Injected volume per cluster | bbl/cluster | 400–2000 |
| Number of clusters | / | 7–20 |
| Spacing between the clusters | ft | 15–50 |
| Well spacing | ft | 440; 660; 880; 1320 |
| Treatment design | High-Viscosity Friction Reducer (Proppant size: 50% 100 mesh and 50% 40/70 mesh) |
| Algorithm | Injected Volume (bbl/Cluster) | Cluster Number | Cluster Spacing (ft) | Well Spacing (ft) | Error from Sim % |
|---|---|---|---|---|---|
| GWO | 1950 | 7 | 25 | 1320 | 1% |
| PSO | 1900 | 7 | 26 | 1320 | 1.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merzoug, A.; Rasouli, V. Offset Well Design Optimization Using a Surrogate Model and Metaheuristic Algorithms: A Bakken Case Study. Eng 2023, 4, 1290-1305. https://doi.org/10.3390/eng4020075
Merzoug A, Rasouli V. Offset Well Design Optimization Using a Surrogate Model and Metaheuristic Algorithms: A Bakken Case Study. Eng. 2023; 4(2):1290-1305. https://doi.org/10.3390/eng4020075
Chicago/Turabian StyleMerzoug, Ahmed, and Vamegh Rasouli. 2023. "Offset Well Design Optimization Using a Surrogate Model and Metaheuristic Algorithms: A Bakken Case Study" Eng 4, no. 2: 1290-1305. https://doi.org/10.3390/eng4020075