
Development of a Speed Control Device for Fishing Vessels at Low Speeds and Simulation of the Control System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Automatic Speed Control Systems
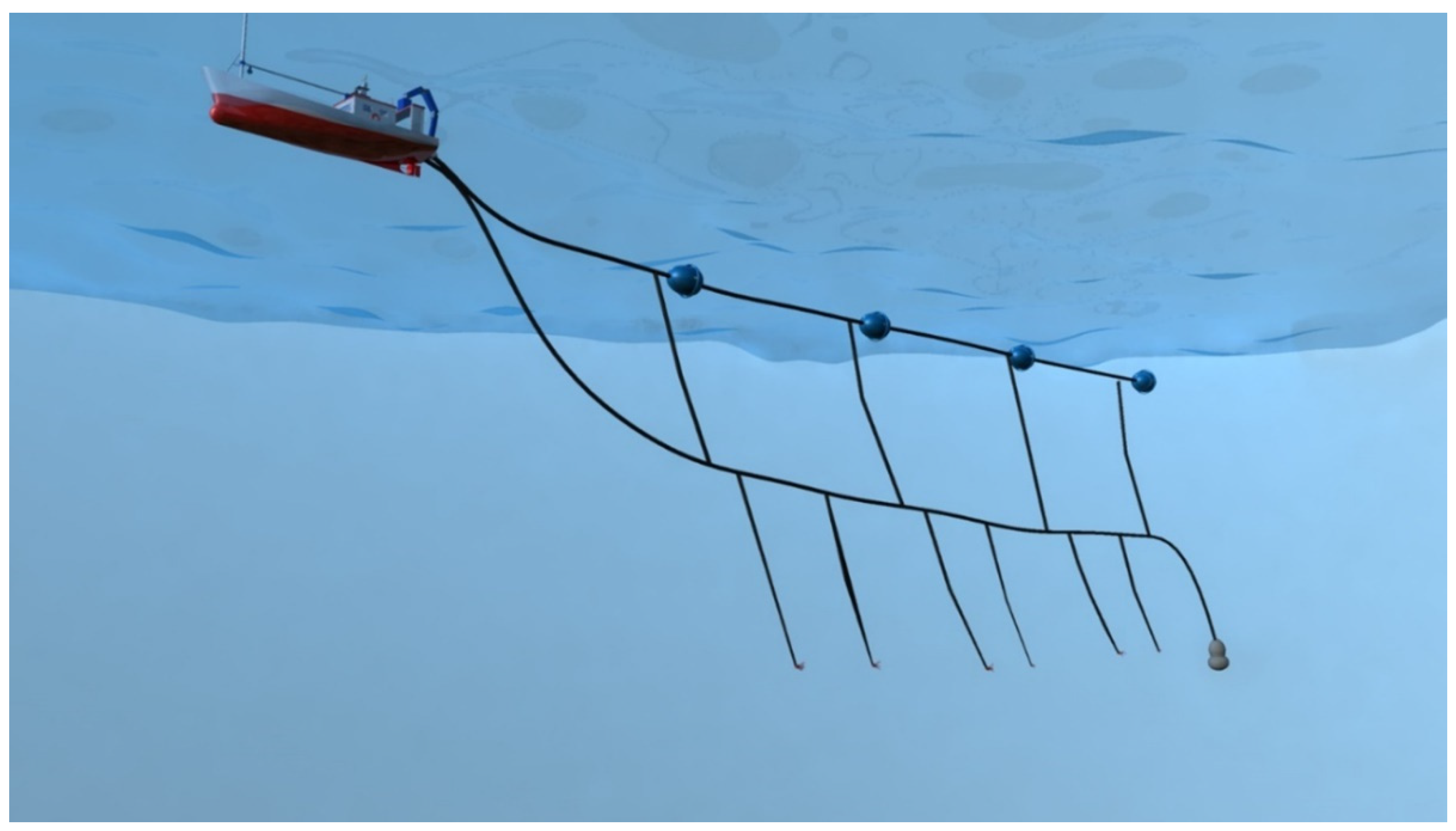
1.2. Trawl Fishing Methods
2. Objective
3. Methods
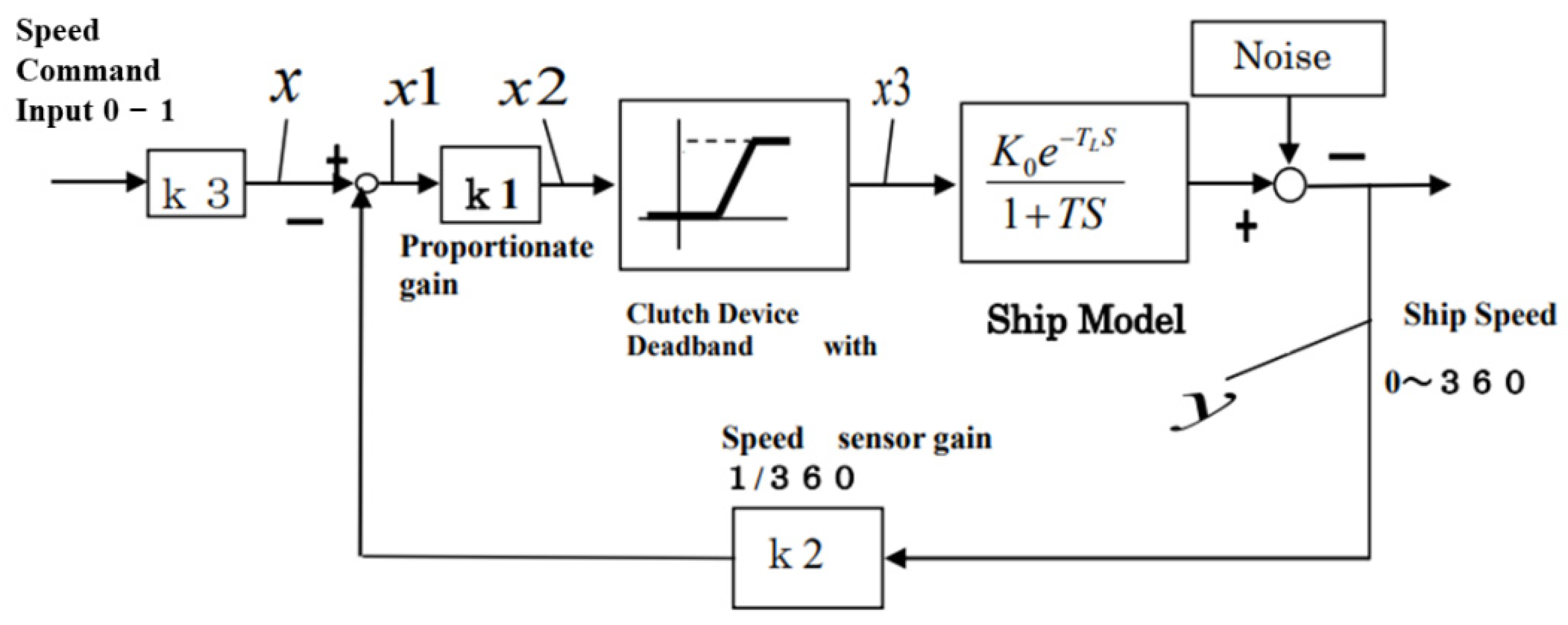
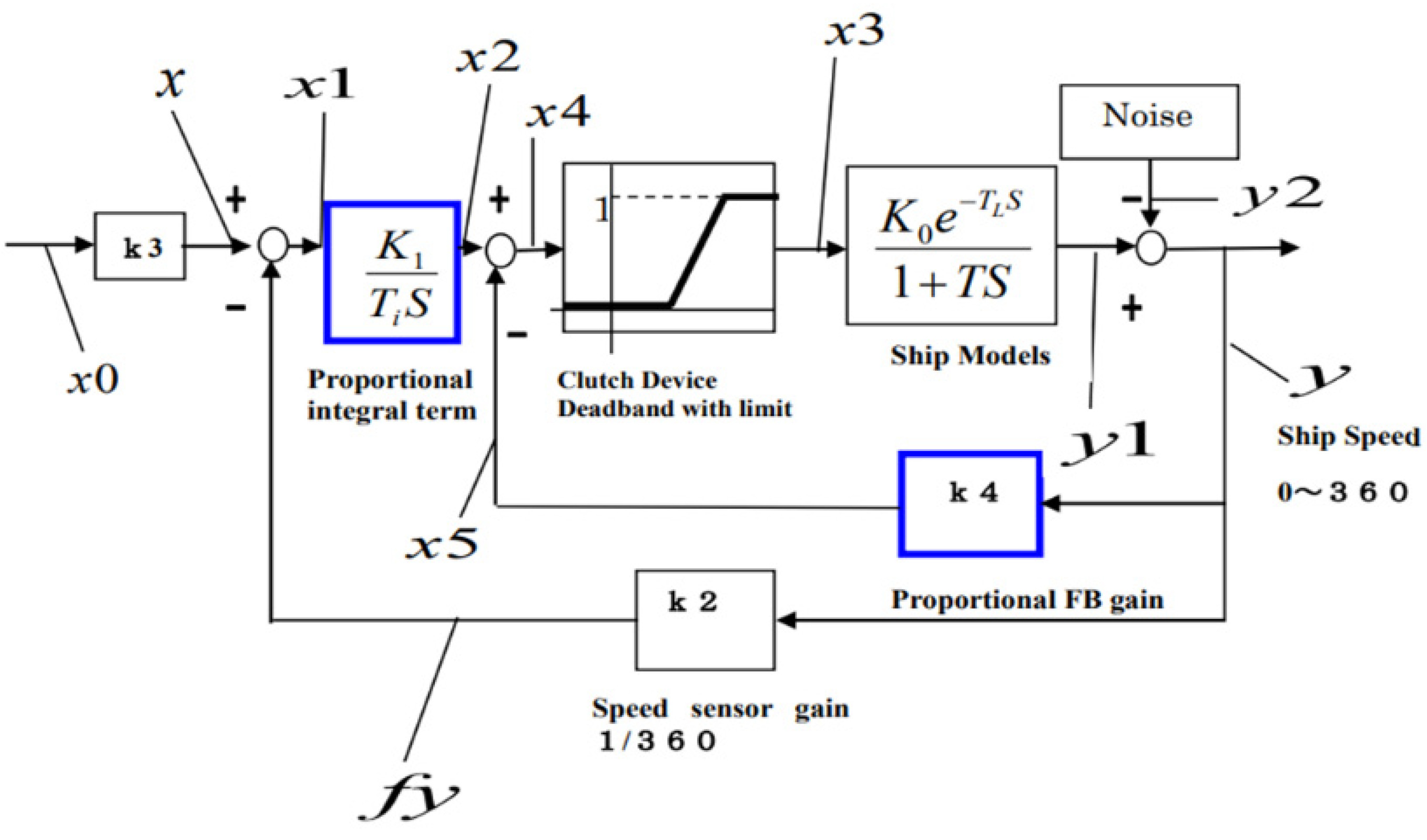
3.1. Control Modeling
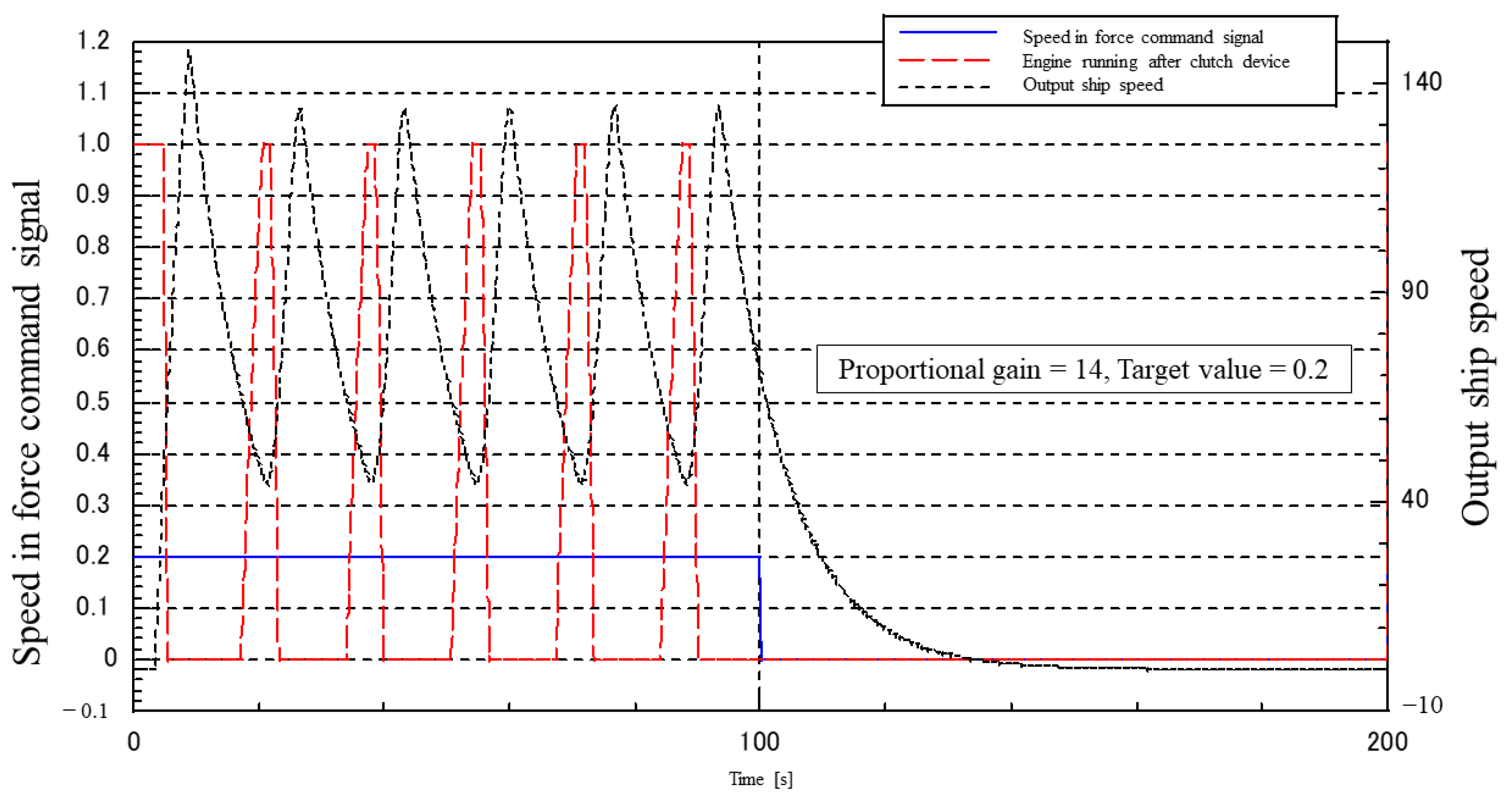
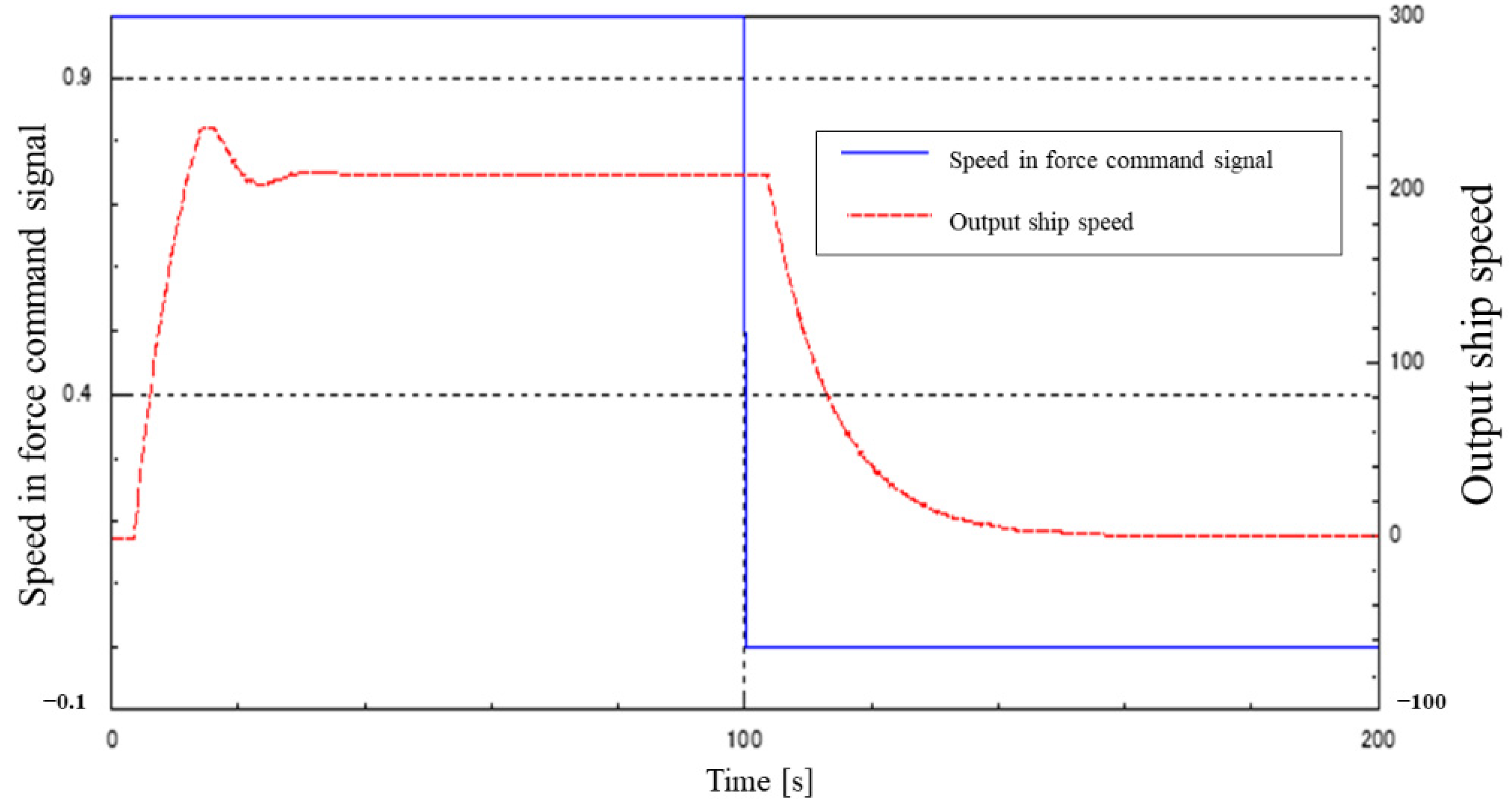
3.2. Various Control Methods (Proportional Control)
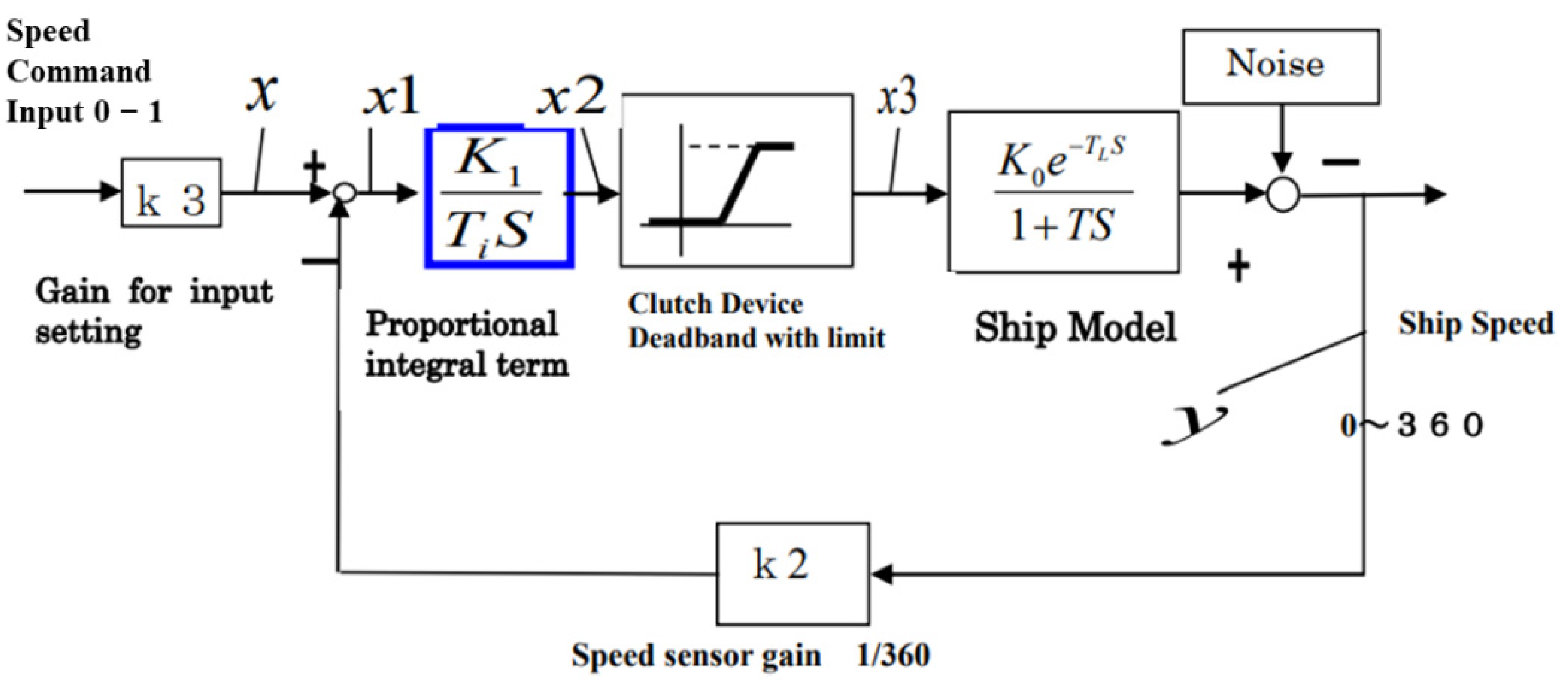
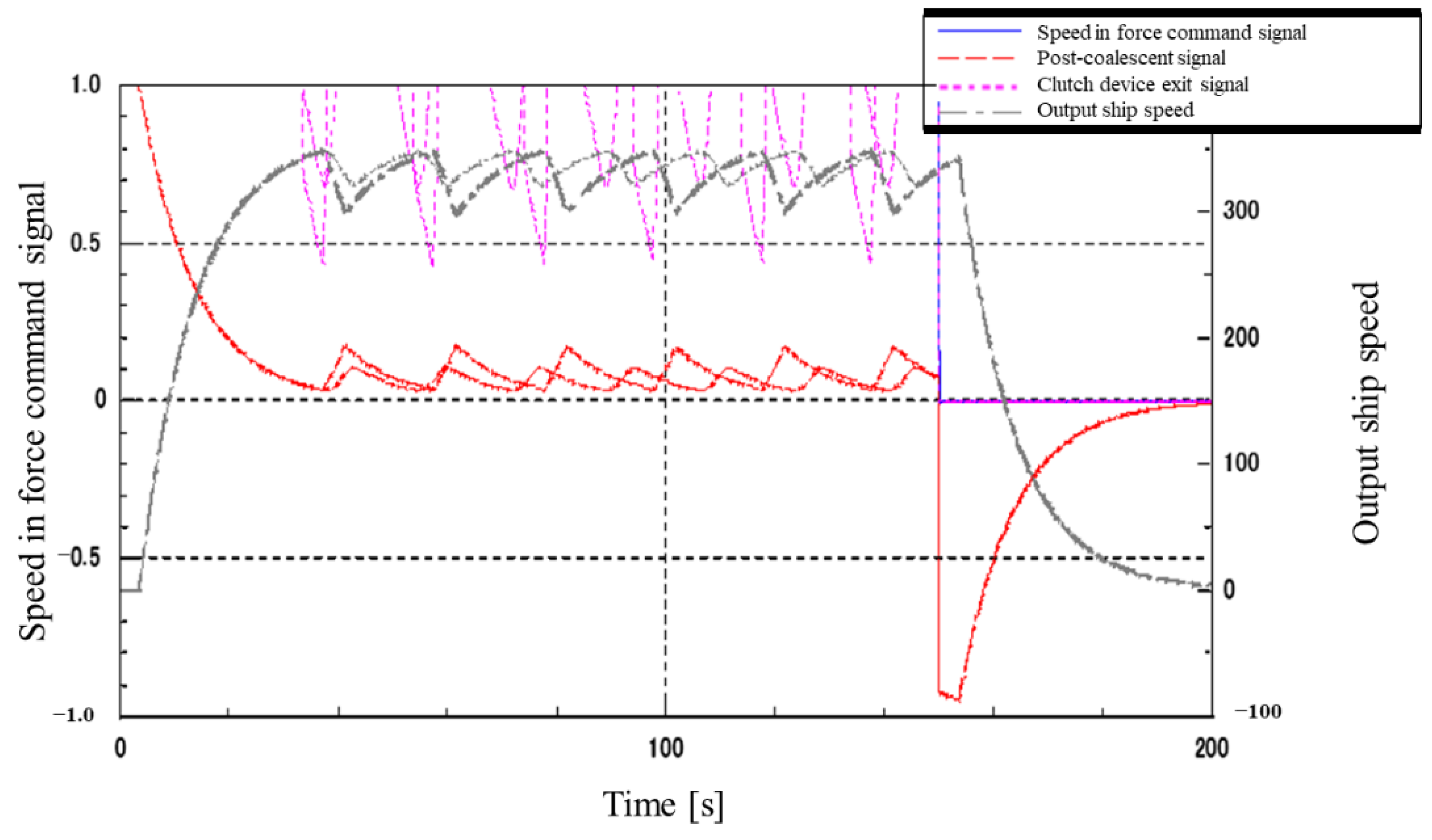
3.3. Various Control Methods (Proportional–Integral (PI) Control)
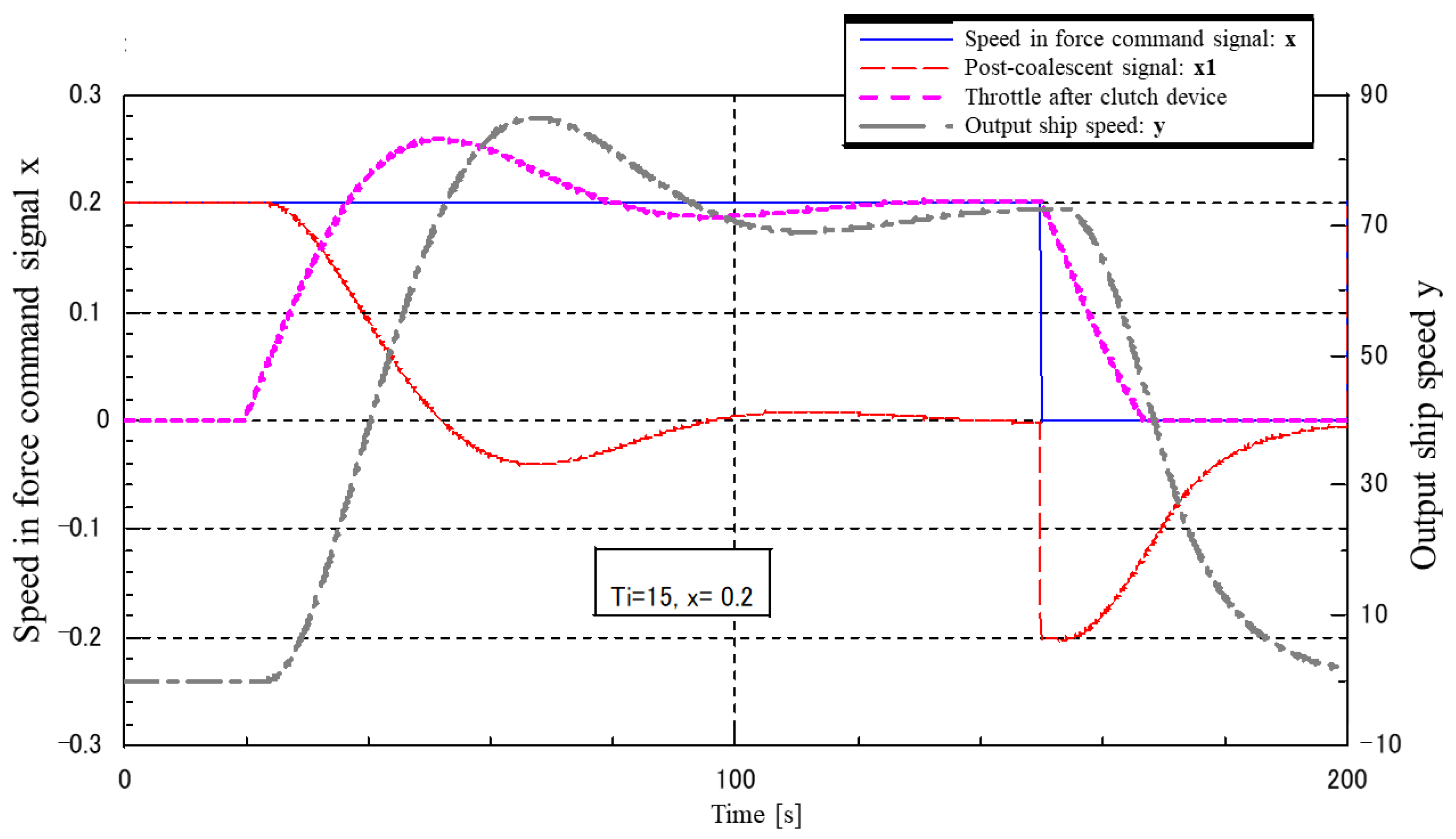
3.4. Various Control Methods (I-P control, 2-DOF PI Control)
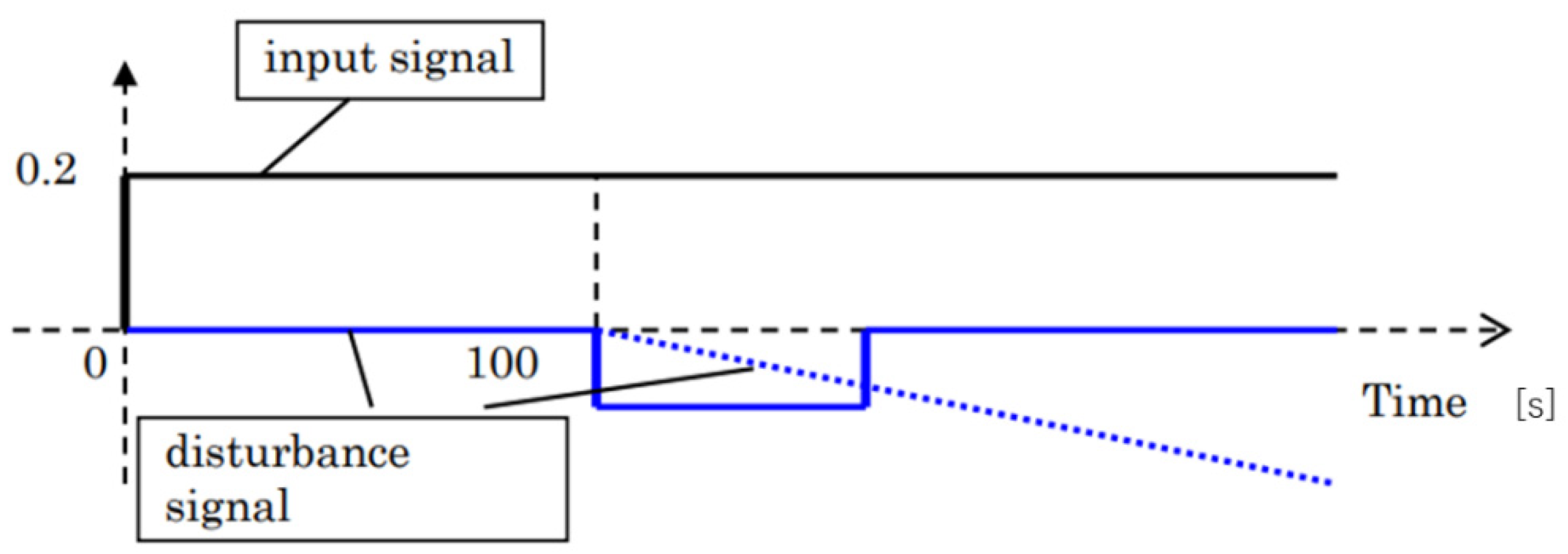
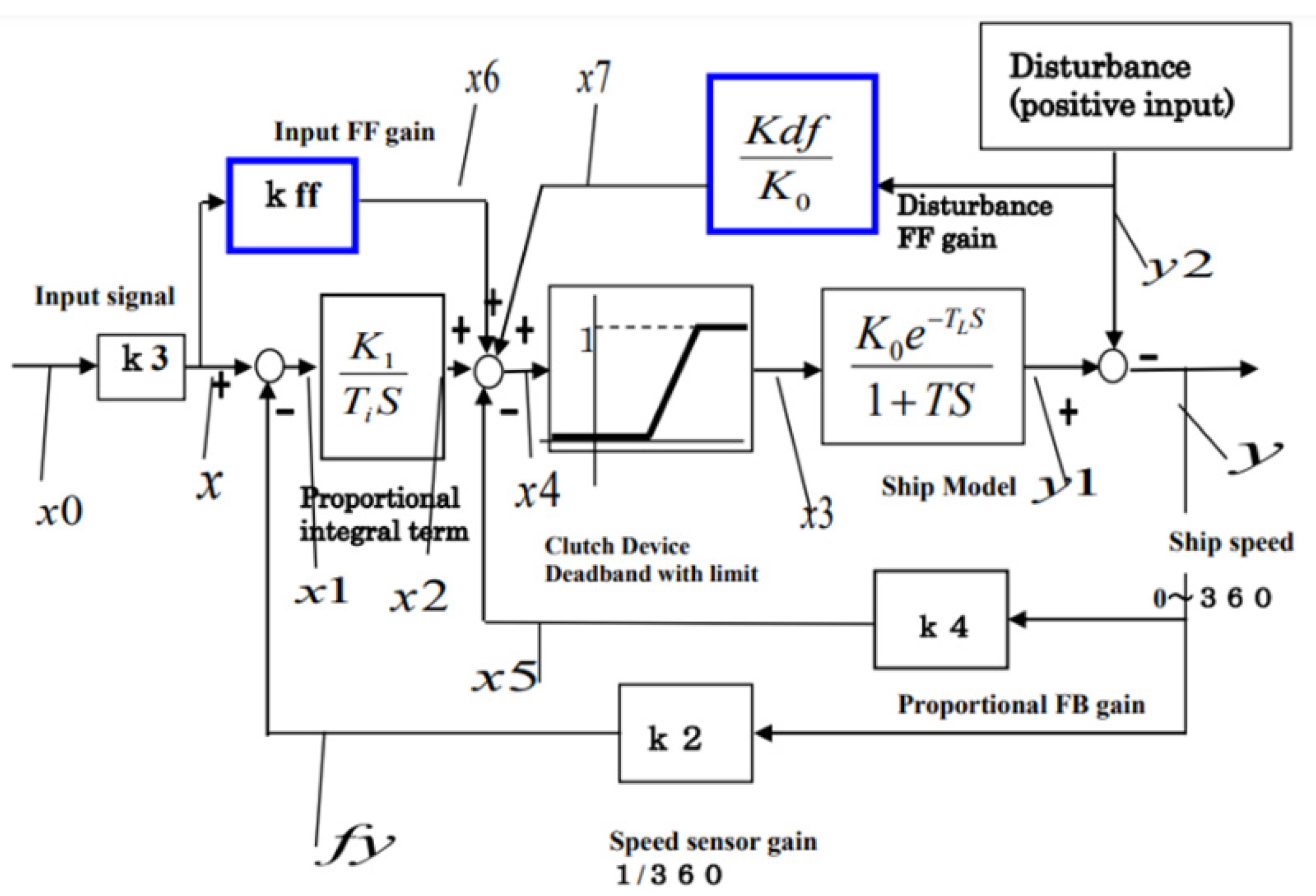
3.5. Methods for Studying the Effects of Disturbances
3.6. Software and Experiments
4. Results
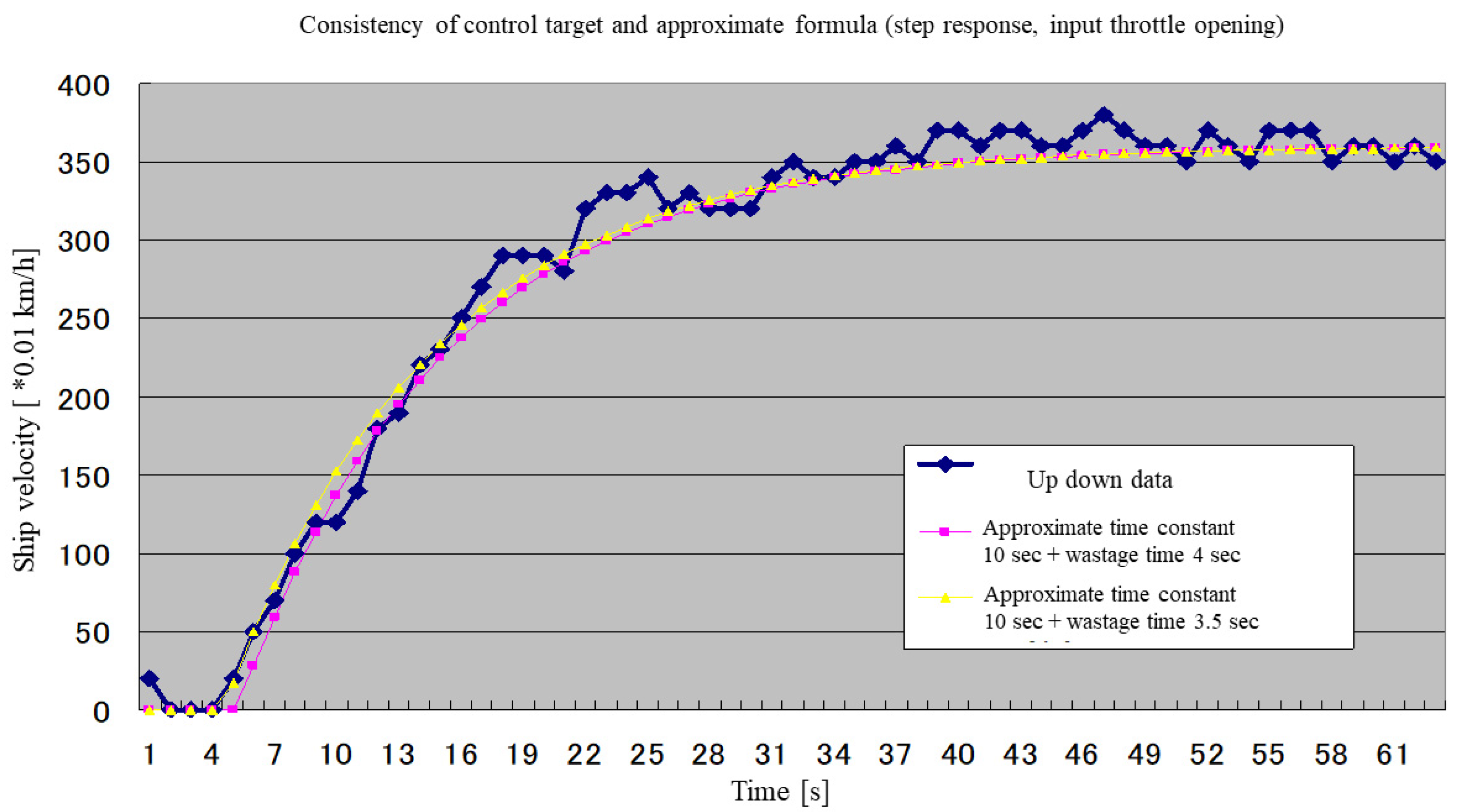
4.1. Model to Be Controlled
4.2. Various Control Results (Proportional Control)
4.3. Various Control Results (Proportional–Integral (PI) Control)
4.4. Various Control Results (I-P Control, 2-DOF PI Control)
4.5. Results of the Effects of Disturbances
4.6. Summary of Results
5. Discussion
5.1. The Model to Be Controlled
5.2. Various Control Methods
5.3. Disturbance Input to I-P Control System
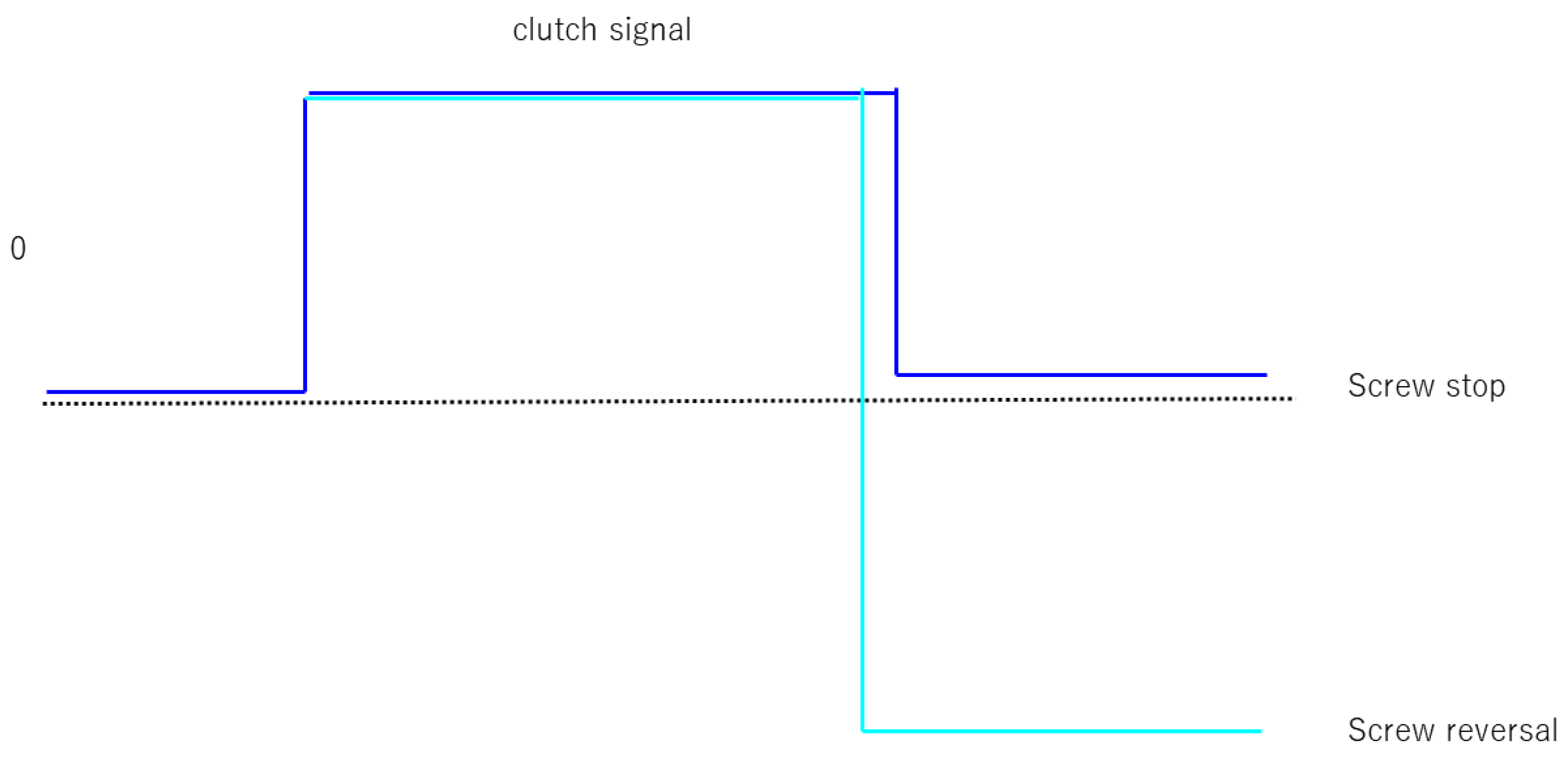
5.4. Dead Zone of the Clutch
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gladju, J.; Kamalam, B.S.; Kanagaraj, A. Applications of data mining and machine learning framework in aquaculture and fisheries: A review. Smart Agric. Technol. 2022, 2, 100061. [Google Scholar] [CrossRef]
- Glaviano, F.; Esposito, R.; Cosmo, A.D.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Kamolov, A.; Al-Absi, A.A.; Sain, M.; Lee, H.J. IoT Technology with Marine Environment Protection and Monitoring. In International Conference on Smart Computing and Cyber Security; Springer: Singapore, 2021; pp. 81–89. [Google Scholar]
- Liu, J.; Aydin, M.; Akyuz, E.; Arslan, O.; Uflaz, E.; Kurt, R.E.; Turan, O. Prediction of human–machine interface (HMI) operational errors for maritime autonomous surface ships (MASS). J. Mar. Sci. Technol. 2022, 27, 293–306. [Google Scholar] [CrossRef]
- Liu, C.; Chu, X.; Wu, W.; Li, S.; He, Z.; Zheng, M.; Zhou, H.; Li, Z. Human–machine cooperation research for navigation of maritime autonomous surface ships: A review and consideration. Ocean Eng. 2022, 246, 110555. [Google Scholar] [CrossRef]
- Zinchenko, S.; Mateichuk, V.; Nosov, P.; Popovych, I.; Solovey, O.; Mamenko, P.; Grosheva, O. Use of simulator equipment for the development and testing of vessel control systems. Sci. J. Riga Tech. Univ.-Electr. Control. Commun. Eng. 2020, 16, 58–64. [Google Scholar] [CrossRef]
- Vander Hook, J.; Seto, W.; Nguyen, V.; Hasnain, Z.; Gallagher, L.; Halpin-Chan, T.; Varahamurthy, V.; Angulo, M. Autonomous swarms of high speed maneuvering surface vessels for the central test evaluation improvement program. Unmanned Syst. Technol. XXI 2019, 11021, 140–149. [Google Scholar]
- Erol, E.; Cansoy, C.E.; Aybar, O.Ö. Assessment of the impact of fouling on vessel energy efficiency by analyzing ship automation data. Appl. Ocean Res. 2020, 105, 102418. [Google Scholar] [CrossRef]
- Amoroso, R.O.; Pitcher, C.R.; Rijnsdorp, A.D.; McConnaughey, R.A.; Parma, A.M.; Suuronen, P.; Eigaard, O.R.; Bastardie, F.; Hintzen, N.T.; Althaus, F.; et al. Bottom trawl fishing footprints on the world’s continental shelves. Proc. Natl. Acad. Sci. USA 2018, 115, E10275–E10282. [Google Scholar] [CrossRef] [PubMed]
- Watling, W.; Norse, E.A. Disturbance of the seabed by mobile fishing gear: A comparison to forest clear cutting. Conserv. Biol. 1998, 12, 1180–1197. [Google Scholar] [CrossRef]
- NRC. Effects of Trawling and Dredging on Seafloor Habitat; National Academy Press: Washington, DC, USA, 2002. [Google Scholar]
- Piet, G.J.; Hintzen, N.T. Indicators of fishing pressure and seabed integrity. ICES J. Mar. Sci. 2012, 69, 1850–1858. [Google Scholar] [CrossRef]
- Gerritsen, H.D.; Minto, C.; Lordan, C. How much of the seabed is impacted by mobile fishing gear? Absolute estimates from Vessel Monitoring System (VMS) point data. ICES J. Mar. Sci. 2013, 70, 523–531. [Google Scholar] [CrossRef]
- Kaiser, M.J.; Collie, J.S.; Hall, S.J.; Jennings, S.; Poiner, I.R. Modification of marine habitats by trawling activities: Prognosis and solutions. Fish Fish. 2002, 3, 114–136. [Google Scholar] [CrossRef]
- Fock, H. Fisheries in the context of marine spatial planning: Defining principal areas for fisheries in the German EEZ. Mar. Policy 2008, 32, 728–739. [Google Scholar] [CrossRef]
- Churchill, J.H. The effect of commercial trawling on sediment resuspension and transport over the Middle Atlantic Bight continental shelf. Cont. Shelf Res. 1989, 9, 841–864. [Google Scholar] [CrossRef]
- Bastardie, F.; Angelini, S.; Bolognini, L.; Fuga, F.; Manfredi, C.; Martinelli, M.; Nielsen, J.R.; Santojanni, A.; Scarcella, G.; Grati, F. Spatial planning for fisheries in the Northern Adriatic: Working toward viable and sustainable fishing. Ecosphere 2017, 8, e01696. [Google Scholar] [CrossRef] [Green Version]




























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiraishi, H.; Shiraishi, H. Development of a Speed Control Device for Fishing Vessels at Low Speeds and Simulation of the Control System. Automation 2022, 3, 545-562. https://doi.org/10.3390/automation3040027
Shiraishi H, Shiraishi H. Development of a Speed Control Device for Fishing Vessels at Low Speeds and Simulation of the Control System. Automation. 2022; 3(4):545-562. https://doi.org/10.3390/automation3040027
Chicago/Turabian StyleShiraishi, Haruhiro, and Hajime Shiraishi. 2022. "Development of a Speed Control Device for Fishing Vessels at Low Speeds and Simulation of the Control System" Automation 3, no. 4: 545-562. https://doi.org/10.3390/automation3040027