
Mobile Services for Smart Agriculture and Forestry, Biodiversity Monitoring, and Water Management: Challenges for 5G/6G Networks

Abstract
:1. Introduction
2. Characteristics of the Sectors in Focus
2.1. Smart Agriculture
- Providing food for the growing population—from 1800 to the present, the global population has grown from 1 billion to 7 billion, and the estimated population in 2100 is 11 billion [12]; at the same time, the average global life expectancy has grown from 28.5 to 73 years [13]; during the same period, the total global agricultural area has grown from 1.35 to 4.87 billion ha (i.e., an increase of 361%), and further acquisition of the acreage for agriculture would be possible only at the expense of forested areas (impossible due to global environmental protection policies); currently, the arable land needed per unit of crop production represents 30% of that required in 1961 [14] so further growth in the volume of food production can be achieved by its increase in efficiency;
- Economical availability (affordability) of food—not only is the production volume important but also the price for the consumer; therefore, it is necessary to increase the cost efficiency of food production, as the room for the state subsidization of it in various countries is limited; one way to enable this is, e.g., SmA-driven productivity growth in terms of both labor and equipment, which could lead to a 20–30% reduction in work time [15], as well as an 85% reduction in pesticide usage and a 10% reduction in fuel usage in agricultural treatments [16];
- Policies on environmental protection and counteracting the effects of climate change—an element of the prevention of environmental contamination is the increasingly strict control and limitation of the use of pesticides and fertilizers to avoid their unnecessary or excessive application (e.g., in the European Union (EU) [17,18]); there is also increasing legal pressure to reduce energy consumption, especially from fossil fuels;
- Energy intensity of agriculture—both agrotechnical treatments and manufacturing (mineral fertilizers, pesticides, etc.) consume energy (although the machinery consumes mainly oil-based fuels, the chemical synthesis is fueled by natural gas); further increases in agricultural production must not be accompanied by a proportional increase in energy consumption;
- Crisis on the global energy-carrier market—sharp increases in the prices set by energy carriers, which were triggered as early as 2021 and then accelerated by the war in Ukraine and its international repercussions (sanctions against Russia, retaliatory measures by Russia), caused a rapid rise in fertilizer prices and a drop of their availability due to the temporary limitation of their production; furthermore, Russia is one of the biggest exporters of mineral fertilizers, which have also been subject to sanctions;
- World food crisis—before the Russian aggression, Ukraine was globally the fifth highest exporter of wheat, the fourth highest exporter of maize, and the highest exporter of sunflower oil (about 50% of global exports) [19]; as a result of the war and the blockade of Ukraine’s seaports by Russia, there was a sharp drop in food exports, which mainly affected countries in Africa and Asia; additionally, as a result of military operations, there was a significant decrease in the sown area in Ukraine, which will have an impact on the yields of the current and subsequent growing seasons in the event of a prolonged war; as a result of the above, a renewed increase in global migration is expected, especially from African and Asian countries to the EU.
2.2. Smart Forestry
- Forest management—forest inventory management of tree stands, silviculture, and plantations, as well as pest and disease control, fire monitoring, and strategic planning and policy making, to ensure sustainable forest management and tactical and operational planning of forest resource usage for harvesting;
- Harvesting operations—harvesting planning with environmental, social, and ecological considerations, as well as execution (tree felling, skidding, processing, and sorting) and land reclamation for reforestation;
- Timber transportation—road planning and construction, with the consideration of minimizing soil erosion and environmental disturbances; transportation planning; vehicle routing scheduling; loading/unloading; and transportation.
2.3. Ecosystem and Biodiversity Monitoring
2.4. Water Management
3. Use Cases
- UC1 Precise position sensing: The precise determination of an object’s position is crucial in all applications using GIS, especially in SmA (e.g., planning agricultural treatments and then running machinery in rows with centimeter accuracy) [35,36,37] and biodiversity monitoring (observation of slow spatial migrations, e.g., movement of coastal sand dunes or range spread of a particular species of plants) [38]. For such use cases, the accuracy of several meters typically provided by Global Navigation Satellite System (GNSS) receivers is inadequate. Therefore, the real-time kinematic (RTK) positioning readout correction technology is the most commonly used, which provides an accuracy of less than 3 cm, based on the corrections streamed over IP networks from RTK reference stations [39] using low bit-rate protocols (such as RTCM SC-104 or CMR/CMR+). The frequency of position readouts in GNSS receivers is also important in the case of objects in motion. The typical maximum frequency is 10 Hz, which corresponds with ∼13.9 cm spot spacing at a 5 km/h velocity (“high-end” receivers support 50 Hz so 5× denser spacing). The RT correction of position readouts is highly important [40].
- UC2 Field mapping: This use case covers the in situ spot measurements of a variety of soil parameters with geo-spatial tagging and includes its electrical conductivity (representing salinity, soil grain size and type, depth of rock, hardly permeable layers, and groundwater), reaction [pH], organic carbon content, and compactness [41,42,43]. The measurements are typically performed “on-the-go” with time intervals of 1–25 s (based on the specifications and data samples from commercial solutions). Hence, their approximate spatial resolution is 1.4–34.7 m at a 5 km/h velocity and a 10 Hz position sampling frequency. Field mapping is performed relatively rarely, every few months/years [44,45], and the RT aspect of the communication is not critical.
- UC3 Remote evaluation of plants and crop properties: For the assessment of a plant’s health and development stages during the vegetation season, contactless spectral analysis is used, most often in visible light (350–700 nm) and near-infrared (IR) wavelengths (700–1000 nm, and less frequently at 700–2500 nm [41,42,46]). The spectral signatures (i.e., specific shapes of spectral characteristics of a given plant species at a specific development stage) can be used to determine whether a plant is healthy, dying, or dead. The concept is based on the “red edge” phenomenon, i.e., a strong change in the vegetation reflectance at the border of the red and near-IR regions. The observation of plants at high resolution (not only the colors of the visible spectrum but also the way they are distributed on a plant’s surface) allows for the determination of their nutritional status, deficiencies of individual nutrients, and identification of infections or infestations.
- UC4 Remote sensing using Light Detection and Ranging (LiDAR): The LiDAR technique allows precise distance measurements of objects based on the laser impulse propagation time or changes in the wavelength of light. Typically, there are two types of LiDAR sensors: passive, which use measurements based on the reflected sun rays, and active, which utilize their own light source to perform measurements. In the AFBW sectors, the LiDAR technique is mostly used for the evaluation of spatial variability and surface modeling (e.g., creating digital elevation models of catchment/sub-catchment boundaries [47], flood risk maps [48], and the evaluation of forest yields [49]) or the identification of the spatial and specific spectral properties of objects (evaluation of soil composition [50,51], classification of trees [52], forest inventory, 3D modeling of trees [53], and many more). In both cases, LiDAR imaging involves the acquisition of high-volume images, typically on the order of gigabytes (hundreds of megabytes per image file), with the size dependent on the image resolution, applied compression, etc. [54]. In addition, LiDAR sensors are applied to both ground-level and in-air operations, which can imply the need to meet additional transmission requirements depending on the storage and processing capabilities provided onboard a flying vehicle (e.g., UAVs). It has to be noted that both UC4 and UC3 are similar in terms of communication requirements, with the exception of the data processing approach. Typically, LiDAR applications do not require near-real-time data transfer and processing to facilitate real-time decision-making processes (e.g., determining the dose of insecticide or fertilizer to be applied to a plant) as opposed to UC3.
- UC5 Yield mapping: This is used for the evaluation of agrotechnical treatment efficiency throughout a growing season. The yield and harvesting process parameters depend on the harvested crop and the design of the combine harvester, which contains multiple onboard sensors providing geo-spatially tagged readouts with a 1–5 s resolution [41,42]. The need to continuously transmit yield monitoring data is dependent on the farm size and the requirements of its management model (e.g., centralized RT farm activity monitoring).
- UC6 Stationary or quasi-stationary sensing: The monitoring of information from stationary or quasi-stationary sensors for various purposes will, in the future, be common in all the AFBW sectors. In SmA, permanently installed sensors can provide insights into the local situation in distant arable lands, e.g., weather stations or soil moisture sensors. In the case of SmF, in order to track forest growth and health, the sensors can be used to monitor environmental parameters, such as air temperature and relative humidity, carbon monoxide and dioxide, wind speed, rain, insolation (illuminance), soil moisture, and temperature, as well as abrupt changes for fire monitoring and prediction parameters such as illuminance (both visible and IR spectra), temperature, and humidity [55]. The specialized sensors can be installed in specific equipment, e.g., pest traps or hidden magnetic sensors to detect the presence of poachers. Environmental monitoring may include the above parameters, as well as air quality indicators. Monitoring in water management [56,57] can include both readings of surface water parameters, e.g., monitoring stations installed in rivers, where parameters such as flow, temperature, oxygenation, reaction, and the content of specific compounds (especially contaminants), and readings from a network of piezometers to monitor groundwater parameters. In smart water grids, the sensors can be used to measure water flow, volume, and losses, as well as water quality. An example of quasi-stationary sensing is the monitoring of vital signs, such as temperature, heart rate, etc., of free-grazing animals in pastures.
- UC7 Mobile object tracking: The class of object tracking use cases relates to all AFBW sectors and all fields and includes the monitoring of the position and status of vehicles and specialist machinery that perform agrotechnical treatments or work in the forest, wild animals wearing special wildlife collars [32], timber batches or other raw products of the forest industry, and, finally, forestry personnel or those involved in biodiversity monitoring, including national park rangers, forestry and fisheries guards, etc. For the latter, the safety and security aspect is of premium importance because these are jobs associated with a high risk of severe accidents, as well as threats from people who commit timber theft, illegal logging, or poaching.
- UC8 Multimedia streaming and processing: This group of use cases is associated with a very wide spectrum of needs in all AFBW sectors. It primarily involves RT situational awareness in remote locations (e.g., remote farmlands and pastures, logging zones, hydraulic structures in the water industry including their protection zones with restricted access, and the gathering points of wildlife, e.g., waterholes, watering troughs, mangers, hay racks, etc.), which is provided by audio and video (visible light and thermal cameras) monitoring [32]. Streams, primarily video and, to a lesser extent, audio, can also be processed in order to detect specific events and, if they occur, activate a live transmission for the detection and documentation of illegal activities, e.g., unauthorized access [59], damaging of crops by off-road vehicles or quads, waste disposal in the forest, illegal logging, timber theft, poaching, and illegal fisheries. The application of image recognition methods to video streams can be used for advanced process automation, e.g., recognition of individual farm animals and their behavior analysis, filing/recording, and individualized feeding [60]; species identification [32]; and video/still image series streams from biodiversity monitoring camera traps. Similar possibilities are provided through the analysis of audio streams. Through analysis and comparison with reference time-spectrum patterns, it is possible to analyze bio-acoustic landscapes and identify animal species (especially birds) [32]. Using the same algorithms, it is possible to detect acoustically illegal hunting or poaching, the unauthorized use of chainsaws, machinery entry into forests, etc.
- UC9 Programming of effectors: Effectors are diverse, electronically controlled mechatronic elements and systems in machinery, which perform specific treatments. They refer especially to the agrotechnical equipment that can be used in agriculture or forestry. The direct remote control of effectors is uncommon. They are managed mostly by specialized onboard controllers, which act according to a defined operation program, which triggers the appropriate effector in a specific location or moment [41]. In the case of machinery supporting autonomous driving during treatments, an effector also refers to autonomously controlled steering according to a map of a treatment route, where an operator is onboard supervising the treatment. The programming of effectors is performed through the upload of a configuration file and is completed without causing significantly noticeable delays in work or downtime, i.e., within a subjectively short time according to a context.
- UC10 Remote control and distributed control systems: In the water industry, the executive elements of hydraulic structures or smart water grid effectors are part of hydrotechnical systems managed by distributed SCADA systems. In modern SCADA solutions, the central IS does not directly control technical devices, but this is performed via Remote Terminal Units (RTUs), the role of which is played by Programmable Logic Controllers (PLCs) or specialized units adapted to work in the network and managed by a central unit. In SmF, the application of remote control systems is often mentioned in the context of the automation of tree harvesting, where they are used to improve control over a slew of motions of forestry cranes [61,62]. The specificity of the detailed solutions and the dynamics of the managed process imply a requirement for connectivity, but the basic expectation, especially in the few cases where direct control is needed, is the reliability and resilience of data transmission.
- UC11 Drones: The class of drone applications used in AFBW is part of a much larger area for their potential uses. The specificity of these sectors is conditioned by their spatial characteristics; therefore, Beyond-Visual-Line-of-Sight (BVLOS) flights are of particular importance. An omnipresent communication platform is needed to support the [63]:
- Command and Control (C2) of flights, either directly controlled or performed along a pre-programmed route (programming/correction of the route, in-flight parameter monitoring);
- connection with the Unmanned Aircraft Systems Traffic Management (UTM) system (airspace management, flight coordination—transmission of telemetry data such as the position, azimuth, speed, etc.);
- First-Person View (FPV) for the remote pilot (RT high-definition video streaming from the camera with a 360° viewing angle);
- flight purpose-specific data transmission (so-called “payload data” transmission).
- photogrammetric or LiDAR data collection;
- situational awareness: crops, pastures, forests, infrastructure, and wildfire monitoring;
- crop pest control by air-dropping pest antagonists [64];
- planting trees [65];
- combating invasive plants [68];
- the eradication of rabies in wildlife by air-dropping oral vaccines [69];
- the extension of coverage using base stations carried by drones [70].
- UC12 Communication between vehicles or self-propelled machines: This relates to the functionality of the synchronous operation of multiple vehicles or machines based on the mechanisms of location sharing, information on the azimuth and ground velocity, and the occasional usage of FPV. In SmA, it can be used for the operation of multiple machines in formation following a human-controlled or even autonomous leader [71,72,73]. In SmF, in addition to the possible agrotechnical cultivation of land during the reclamation of land for afforestation, off-road truck platooning can be used for the transportation of timber [74].
- UC13 Remote robots: Remote AFBW robots [42,73,75,76,77,78] are based mainly on wheeled or tracked Unmanned Ground Vehicles (UGVs). There also exist underwater or floating solutions [79,80]. There are three basic modes of operation: remote-controlled, teleoperated, and autonomous. The difference between the first two lies in the visual line of sight (VLOS) and BVLOS control, respectively. Although VLOS-operated robots can be controlled using direct wireless links, teleoperated robots are comparable to BVLOS in UC11 (without links to UTM). The operation of UAVs has some similarities to UGVs, although, especially in wooded areas, providing coverage at ground level is more challenging than at drone flight altitudes of up to 120 m. For semi-autonomous robots (ambiance awareness, plant row detection, or driving according to a sowing map with high-precision GNSS positioning), the needs include:
- communication for, e.g., the uploading of work scenarios and updates to the knowledge base (weed patterns, pest presence symptoms, trees or signs of infestations that are found);
- remote computing for offloading the local processing onboard the robot;
- transmission of information (using video streams) to the robot operator or supervisor.
- UC14 Support for field personnel: To support field workers in the era of Industry 4.0, online access to the supporting ISs is a given, e.g., a personal terminal (tablet) receiving information from a GIS based on the current position (soil property maps and water relations, sown plants or forest inventory, historical records regarding agricultural treatments at the site, previous photos, etc.), enabling the quick familiarization by the staff member of the situation without the necessity of their previous presence onsite. In the future, the wide application of AR technology is expected to enrich observed images with contextual information (e.g., labels of recognized objects and their components, descriptions of their properties, operation schemes, etc.). AR imposes high demands for connectivity and extremely high-quality video streaming in RT, with a maximum latency of 20 ms for good QoS [81] (cybersickness becomes perceptible above 40 ms and significantly intensifies above 75 ms [82]).
4. Requirements
5. Related Works
6. Mobile Networks
6.1. 5GS Capabilities
- Performance and QoS control: The main peak 5GS performance indicators include data rates of up to 20 Gbps, latency reaching 1 ms, up to a million devices per km2, and very high reliability and support for objects moving at speeds of up to 500 km/h. The specific QoS targets can be enforced on the UP level by assigning the user data traffic a relevant 5G QoS Identifier (5QI)—the identifier associated with a set of QoS parameters (communication type, priority level, delay, errors, etc.) [117]. So far, 32 different standardized categories have been specified by 3GPP, but the list can be dynamically extended by an MNO for private use if needed.
- Programmability: The 5GS architecture design incorporates softwarization, virtualization, Software-Defined Networking (SDN), and other cloud-native approaches as the basis for operation. This facilitates the programmability of both the Control Plane (CP) and UP. The CP functionalities can be extended by any Network Function (NF), e.g., generic Application Functions (AFs), as long as compatibility with the Service-Based Architecture (SBA) is provided, i.e., communication with other CP NFs using RESTful Application Programming Interfaces (APIs), JSON serialization, usage of HTTP/2 in the application layer, and TCP for transport. The UP operation can be enhanced by chaining atomic functions that improve UP traffic handling with regard to use-case specificity or service requirements. Example extensions involve deep packet inspection, firewalls, selective marking or altering, packet classification and encapsulation, anti-virus protection, parental control, traffic forwarding or redirection, etc.
- Network Slicing: Network Slicing (NS) is a concept that allows the creation of a “federation” of virtual parallel networks over a shared infrastructure, with each network tailored to the requirements of the specific supported services (joint usage of certain mechanisms, e.g., mobility or user capability subscription management). At present, there exist five network slice types defined by 3GPP [117], with future extensions possible, namely eMBB, URLLC, Massive Internet of Things (MIoT), Vehicle to Everything (V2X) (since Release 16), and High-Performance Machine-Type Communications (HMTC) (since Release 17). The adaptation to the requirements can involve the integration of slice-specific CP functions with 5GS CP (using SBA CP communication bus-separation mechanisms) and slice-specific user traffic processing chains (individualized traffic operations, e.g., flow duplication for URLLC to improve reliability). The necessary support for slice selection and admission control has to be provided on the network side, as well as the UE side, to enable the on-demand attachment to one or multiple slices.
- Integration of third parties with 5GS Core Network (CN): The 5GS CP incorporates multiple mechanisms that facilitate the network capabilities’ exposure, integration with external entities, and reuse of already deployed functionalities among multiple stakeholders. Firstly, the 3GPP functions implement a unified northbound interface API framework, i.e., Common Application Programming Interface Framework (CAPIF) [118]. The adopted framework enables the secure exposure of the 5GS CNs’ APIs to external consumers and standardizes the exposure of the third parties’ APIs to the 5GS CN. The Service Enabler Architecture Layer for Verticals (SEAL) framework provides the means for sharing already developed core functions and mechanisms among the industries implementing the parallel use cases. It standardizes the interconnection process and interservice communication in order to enable distributed deployment and access [119]. Finally, a Network Exposure Function (NEF) provides the mechanisms for the network capabilities’ (e.g., native CP mechanisms) exposure for integration with external systems. In addition, to tighten the integration, the special AFs, which act as mediators for the Application Plane (AP) services, can be deployed to cooperate with the CP NFs.
- Network coverage: The 3GPP standardization process of 5GS has reached maturity and the technology is currently being intensively deployed across the world. In the case of the EU, it is estimated that in total, around 72% of the EU population already has access to 5G network services [120]. With wide network coverage, it is possible to deliver specific services in a cost-efficient manner, i.e., without heavy infrastructural investments. However, as the majority of the population inhabits urbanized areas, the actual network coverage in rural environments can be very limited or non-existent. In such cases, coverage improvements [121] can be carried out, to a certain extent, by MNOs via innate 5GS Radio Access Network (RAN) mechanisms such as beam management (beamforming, beamsteering) or massive Multiple Input Multiple Output (MIMO).
- Additional support: 3GPP defined multiple NFs and CP services that can bring additional benefits by improving the operation of network slices. The major functionalities include:
- Data analytics—An Network Data Analytics Function (NWDAF) gathers and processes data from all 5GS NFs to perform analytics and predictions in eight categories [122] related to the slice load level, observed service experience, NF load, network performance, UE, user data congestion, data congestion, and QoS changes. Some examples of the information that can be provided by an NWDAF include predictions of QoS changes in geographical areas, QoS degradation and risk of communication loss, UE mobility, UE abnormal behavior identification, and many more [123].
- Location services [124]—Location Services (LCS) enable the provisioning of the location data of specific UE, maintaining data security (UE anonymity, access using codewords, LCS client whitelisting). The location information can be obtained using UE-assisted and network-based (using RAN nodes) mechanisms and can include the velocity and geographic and civic location of the UE. However, the 3GPP system assumes achieving a maximum location accuracy equal to 0.2 m (horizontal and vertical plane) under very strict conditions regarding the distance between the localized objects and 5GS positioning nodes [83]. The most common scenario (for rural and urban environments) enables a 1 m horizontal and 2 m vertical accuracy with a 95% confidence level. Therefore, in more demanding use cases, which require centimeter-level accuracy, other localization technologies should be used such as RTK.
- Security—5GS provides authentication and authorization capabilities via special dedicated NFs, which enable high-grained control over the admission of individual UEs to the network and specific network slices, also with the involvement of the third parties’ ISs through the exposed CP API. Moreover, the 5G-Equipment Identity Register (5G-EIR) entity enables the verification of devices registered on the network and the mitigation of issues caused, e.g., by missing device capabilities, unprivileged access (using stolen equipment), etc.
- Mobility—The mobility aspects of connected UEs are handled by the Access and Mobility Management Function (AMF) entity, which is also a signaling proxy for interactions with UEs and New Radio (NR), e.g., to provide location information based on RAN measurements [125].
- UE energy saving—5GS provides multiple mechanisms that enable battery-saving support on the UE side. The most important ones include Discontinuous Reception(DRX)–a terminal that is in the active state only for the data transmission; scheduler-level mechanisms, such as cross-slot scheduling (sending data in between control channel messages) or grant-free access (skipping transmission channel allocation procedures); and paging mechanisms (early paging indication and UE sub-grouping, allowing a decrease in false paging alarms), as well as mechanisms allowing for small data transmissions in the uplink while in an inactive state (in channel-access procedures) [126,127].
- Edge computing: Tight integration of 5GS with edge computing platforms, such as European Telecommunications Standards Institute (ETSI) Multi-Access Edge Computing (MEC) [128], enables the offloading of efficient computations by forwarding the computationally intensive operations to the local compute units close to the RAN nodes (e.g., AI-based image and video processing) instead of transmitting the data to remote servers. In addition to considerable bandwidth savings, it enables latency reduction due to spatial proximity between UEs and edge applications.
6.2. Evolution toward 6G
- Increased performance—Operation in a higher-frequency spectrum in sub-THz (cf. Figure 1) and potentially THz bands, together with enhancements of the resource scheduling mechanisms, will enable the provisioning of data rates of up to 1 Tbps [131] to network users. Moreover, due to the projected technological improvements, 6GS will target latencies below 1 ms in CP and below 0.1 ms in UP [131], exceptional reliability (frame error rate below 10−9), and 10× higher spectrum efficiency than in 5GS (capacity growth) [132].
- Ubiquitous availability—6GS is envisioned to support worldwide service availability by tight integration with NTN (satellite systems, airborne platforms, etc.) and support for nomadic cells. The currently ongoing standardization efforts regarding the integration of 5GS with NTN systems (focus on architectural design and coverage and availability extension) are considered to be the initial step in unleashing the full potential of the unified terrestrial and satellite ecosystem [133].
- Robust communication—Highly flexible, coherent, and ultra-reliable services will be facilitated by a newly redesigned CN that will be built according to “software-only” paradigms. The new approach will contribute to the aspects of network scalability and mobility support by adapting cloud-native service state sharing and migration.
- Heterogeneity of infrastructure owners—The improved security and trust mechanisms with support for deterministic QoS and governance in multi-administrated environments are expected to facilitate network deployments on multiple administrative domains. This will allow for capitalizing on the cloud and edge infrastructure providers, leveraging the availability of network services.
- Sustainability—By exploiting AI-driven optimization techniques and reducing network overhead, the reduction of the carbon footprint of mobile networks both on the network side and the UE side is planned.
- Ultra-precise positioning—Due to the operation in higher THz bands, 6G-based localization techniques will enable finer spatial and temporal resolution. Moreover, it is expected that RAN nodes will support ultra-massive MIMO that can also contribute to finer angular resolution in Angle of Arrival (AoA) localization methods. Altogether, a precision of 1 cm in 3D is targeted as an ultimate goal.
- Support for a very large number of devices—The adoption of advanced RAN mechanisms, such as massive MIMO, as well as complete RAN reorganization toward cell-free networks, is expected to allow a supporting device density of up to 100/m3 [134]. Moreover, solutions that support low-energy or battery-free IoT devices are planned to be incorporated such as Intelligent Reflective Surface (IRS)—a massive number of reflecting elements that allow for the achievement of high passive beamforming gains [135].
- Advanced cognitive insight—The adoption of AI-based mechanisms, enhanced localization, and sensing will allow for more accurate predictions regarding UEs and network events. The more precise knowledge and advanced deep integration with AI can further contribute to network management and orchestration of automation and optimization [136].

7. Mobile Networks Support for the Sectors in Focus
- Availability of the relevant service class—each use case should be implementable using one of the 3GPP service classes, i.e., Slice/Service Type (SST) [117], coupled with its general characteristics and the use-case specifics;
- UP performance—it has to be ensured that the QoS requirements of the use case can be met by the UP entities. The availability of a 5QI fulfilling the use-case requirements confirms the UP support.
- Network omnipresence—Coverage extensions achieved through integration with NTN will provide massive benefits to use cases that involve large amounts of spatially distributed sensors (e.g., UC6, UC10). The exploitation of satellite systems will enable the building of AFBW systems with lower overheads regarding infrastructural costs, contributing to the profitability of both MNOs and service providers. Although the 5GS roadmap gradually includes NTN feature integration (Release 16—satellite access in 5G; Release 17—IoT/NR over NTN and satellite components in the 5G architecture; Release 18—IoT/NR NTN enhancements and IoT NTN management architecture/mechanisms [147,148,149]), it is 6GS where terrestrial and non-terrestrial access will be unified [133].
- Positioning with an accuracy of 1 cm in 3D—The accuracy assumed by 5GS (30 cm precision with a 1 s latency [83]) is still far from sufficient in the most demanding AFBW cases. The built-in 6GS location mechanisms eliminate this issue by providing better performance, thus allowing for backup measurements (e.g., for security purposes) or resignation from the RTK solutions. Moreover, embedding location capabilities into the terminal allows for better power management and the extension of battery lifetime (network-side localization).
- Flexible service deployment—The support for deployment over heterogeneous infrastructure will contribute to service availability and resilience, which is especially important in remote edge environments.
8. Open Issues
- Availability of NS-enabled 5GS—At present, the vast majority of commercial 5G network deployments implement a non-standalone deployment architecture [150], which does not support NS. As a consequence, a 5G network can be perceived as an improved version of a 4G network (“boosted” eMBB-only network), which does not provide the capabilities needed to offer commercial AFBW services.
- Dynamic NS—In the centralized approach to NS currently adopted by 3GPP, there exist no touch-points for interaction between an MNO and slice tenants; no relevant interfaces are specified in the Operations Support System (OSS)/Business Support System (BSS), which could be used for slice negotiation, slice request, slice management, etc. This severely impacts the dynamicity of slice deployment and exposure to specific verticals, thus limiting the NS business potential [151].
- Lack of direct Device to Device (D2D) link—This is needed to provide short-distance direct communication between UEs, especially vehicular ones (automotive, UAVs, UGVs, etc.), regardless of the serving PLMN. Such communication is extremely important for, e.g., information (presence, location, etc.) broadcasting in the neighborhood or data exchange in objects’ swarms. Its standardization is still ongoing within the 3GPP Release 18, “5G Advanced” (to be completed by the middle of 2024) [149].
- Seamless edge application context switching (change of the edge cloud or server)—A PLMN should have the ability to predict a network-level handover, forward the served application’s context in advance to the target server, and then perform a correlated AP-level and network-level handover; the required delay limit for latency-critical services may not be met during the context transfer [152] due to the procedure definition [153] and virtualization aspects [154,155]. The answer to this problem is user-context transfer control by the application [152]. Nevertheless, the issue of integration of various architectural frameworks (e.g., 5GS, virtualization, and edge computing frameworks) with functional overlaps still exists and needs a thorough redesign of the integrated architecture to avoid the uncoordinated competition of overlapping mechanisms, unstable performance, etc. [128].
- Lack of mechanisms for proactive, on-demand coverage adaptation—There are no interfaces exposed by a PLMN to serve the requests for coverage improvements in the specific area; with dedicated RAN controllers, such as Open RAN (O-RAN) that support applications dedicated to RAN optimization and expose a controller’s API, such mechanisms may be provided [156]. 5GS and O-RAN have not been integrated yet, but there exists a proposed solution [157].
- National roaming for specific groups of UEs—Coverage problems in a specific PLMN could be solved by the permission of a re-connection to another PLMN providing the required QoS in the problematic area. However, the visited PLMN must be aware of, e.g., the need to provide a Local Break-Out (LBO) of the traffic to the home PLMN’s MEC or temporarily host the relevant edge cloud application. Appropriate inter-PLMN AP-level and network-level handover coordination must be ensured.
- Cross-border and roaming operations—The EU rules of the “free movement of goods and services” and “Single European sky” (the ability of a UAV to operate in any EU country) have implications for communication services for the AFBW sectors; service availability or continuity abroad has to be provided, including the integration of the exposed mobile network control mechanisms with the vertical industry’s ICT environment. Wide implementation of LBO roaming architecture (so far, practically unused due to the problem of needing a home PLMN to verify the charging information reported by the visited PLMN), either standalone or hybrid with Home Routed (HR) for specific transmission channels, will have to be implemented based on NS and differentiation of user plane function (UPF), as well as a way of building the inter-operator trust [158]. This problem will be particularly important in the case of UAV applications but also in the case of commercial highly-specialized robot service providers, wildlife migration monitoring with tracking collars, etc.
- End-to-End (E2E) feature span—PLMN capabilities extend as far as the N6 interface and its termination in a Data Network (DN). Hence, despite a plethora of 5GS mechanisms, e.g., for data ciphering, integrity protection, authentication of NFs or UEs, secure integration with other PLMNs, or non-3GPP access, exploiting their full potential is limited. Although some partial solutions exist [63], a generic mechanism is needed to enable the extension of these mechanisms beyond the scope of the 5G network. The same issue can be observed in the context of NS. The PLMN network slices and hence the QoS and security control mechanisms (non-repudiation of data, data integrity, the confidentiality of identities, etc.) inherently do not go over the UPF termination point in a DN (N6 interface). This problem is fundamental in the case of low latency and critical communication, where the QoS violation impacts the safety of operations. To maintain full E2E control over the performance and security and thus mitigate the risks, a PLMN should span the vertical industry’s ISs hosting environment or host their ISs on the PLMN’s premises.
9. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 3GPP | Third-Generation Partnership Project |
| 5G-EIR | 5G-Equipment Identity Register |
| 5GC | 5G Core |
| 5GS | 5G System |
| 5QI | 5G QoS Identifier |
| 6GS | 6G System |
| AF | Application Function |
| AFBW | smart agriculture, forestry, biodiversity monitoring, and water management |
| AI | Artificial Intelligence |
| AMF | Access and Mobility Management Function |
| AoA | Angle of Arrival |
| AP | Application Plane |
| API | Application Programming Interface |
| AR | Augmented Reality |
| BSS | Business Support System |
| BVLOS | Beyond-Visual-Line-of-Sight |
| C2 | Command and Control |
| CAPIF | Common Application Programming Interface Framework |
| CN | Core Network |
| CP | Control Plane |
| D2D | Device to Device |
| DL | downlink |
| DN | Data Network |
| DRX | Discontinuous Reception |
| E2E | End-to-End |
| EC | European Communities |
| eMBB | Enhanced Mobile Broadband |
| ERP | Enterprise Resource Planning |
| ETSI | European Telecommunications Standards Institute |
| EU | European Union |
| FPV | First-Person View |
| GBR | Guaranteed Bit Rate |
| GIS | Geographic Information System |
| GNSS | Global Navigation Satellite System |
| GSMA | Global System for Mobile Communications Association |
| HCS | Human-Centric Services |
| HMTC | High-Performance Machine-Type Communications |
| HR | Home Routed |
| ICT | Information and Communication Technology |
| IoT | Internet of Things |
| IR | infrared |
| IRS | Intelligent Reflective Surface |
| IS | Information System |
| ISM | Industrial–Scientific–Medical |
| ITU | International Telecommunication Union |
| KPI | Key Performance Indicator |
| LBO | Local Break-Out |
| LCS | Location Services |
| LiDAR | Light Detection and Ranging |
| MAPE-K | Monitor–Analyze–Plan–Execute based on Knowledge |
| MBRLLC | Mobile Broadband Reliable Low Latency |
| MEC | Multi-Access Edge Computing |
| MES | Manufacturing Execution System |
| MIMO | Multiple Input Multiple Output |
| MIoT | Massive Internet of Things |
| ML | Machine Learning |
| mMTC | Massive Machine-Type Communications |
| MNO | Mobile Network Operator |
| MPS | Multi-Purpose Services |
| mURLLC | Massive Ultra-Reliable Low-Latency Communication |
| NEF | Network Exposure Function |
| NF | Network Function |
| NR | New Radio |
| NS | Network Slicing |
| NSI | Network Slice Instance |
| NTN | Non-Terrestrial Network |
| NWDAF | Network Data Analytics Function |
| O-RAN | Open RAN |
| OSS | Operations Support System |
| OTA | Over-The-Air |
| PLC | Programmable Logic Controller |
| PLMN | Public Land Mobile Network |
| PQI | PC5 5QI |
| PrA | Precision Agriculture |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RAT | Radio Access Technology |
| RT | real time |
| RTC | Real-Time Control |
| RTK | Real-Time Kinematic |
| RTT | round-trip time |
| RTU | Remote Terminal Unit |
| SBA | Service-Based Architecture |
| SCADA | Supervisory Control And Data Acquisition |
| SDN | Software-Defined Networking |
| SDO | Standards Developing Organization |
| SDSS | Spatial Decision Support System |
| SEAL | Service Enabler Architecture Layer for Verticals |
| SmA | Smart Agriculture |
| SmF | Smart Forestry |
| SST | Slice/Service Type |
| UAV | Unmanned Aerial Vehicle |
| UE | user equipment |
| UGV | Unmanned Ground Vehicle |
| UL | uplink |
| UN | United Nations |
| UP | User Plane |
| UPF | User Plane Function |
| URLLC | Ultra-Reliable Low-Latency Communication |
| UTM | Unmanned Aircraft Systems Traffic Management |
| V2V | Vehicle to Vehicle |
| V2X | Vehicle to Everything |
| VLOS | Visual Line of Sight |
| VR | Virtual Reality |
References
- International Energy Agency. Global Energy Crisis. [Website]. Available online: https://www.iea.org/about (accessed on 16 January 2023).
- The World Bank. Food Security Update. Report December 1st, 2022, International Bank for Reconstruction and Development The World Bank. 2022. Available online: https://thedocs.worldbank.org/en/doc/40ebbf38f5a6b68bfc11e5273e1405d4-0090012022/related/Food-Security-Update-LXXIV-December-1-2022.pdf (accessed on 16 January 2023).
- Markets and Markets. Smart Agriculture Market by Offering, Agriculture Type (Precision Farming, Livestock Monitoring, Precision Aquaculture, Precision Forestry, Smart Greenhouse), Application, Farm Size, & Geography (2021–2026). [Website]. Available online: https://www.marketsandmarkets.com/Market-Reports/smart-agriculture-market-239736790.html (accessed on 16 January 2023).
- Simonović, A.; Marković, D.; Simonović, V.; Krstić, D. Impact of Industry 4.0 on agricultural industry. Int. Sci. J. 2020, 5, 164–166. [Google Scholar]
- Agmatix. The Role of Industry 4.0 in Agriculture. [Website]. Available online: https://www.agmatix.com/blog/the-role-of-industry-4-0-in-agriculture (accessed on 16 January 2023).
- He, Z.; Turner, P. A Systematic Review on Technologies and Industry 4.0 in the Forest Supply Chain: A Framework Identifying Challenges and Opportunities. Logistics 2021, 5, 88. [Google Scholar] [CrossRef]
- Huawei. The Connected Farm: A Smart Agriculture Market Assessment; White Paper; Huawei: Shenzhen, China, 2017; Available online: https://www-file.huawei.com/-/media/corporate/images/pdf/v2-smart-agriculture-0517.pdf?la=en (accessed on 16 January 2023).
- 3GPP. 3GPP Specification Series 22. [Website]. Available online: https://www.3gpp.org/dynareport?code=22-series.htm (accessed on 16 January 2023).
- Adamchuk, V.I. Precision Agriculture: Does it make sense? Better Crop. Plant Food 2010, 94, 4–6. Available online: http://ipni.net/publication/bettercrops.nsf/0/DD1B3874E030BC1485257980006039BF/$FILE/Better%20Crops%202010-3%20p4-6.pdf (accessed on 16 January 2023).
- IBM. An Architectural Blueprint for Autonomic Computing. In Autonomic Computing White Paper, 3rd ed.; IBM Corporation: Hawthorne, NY, USA, 2005; Available online: https://www-03.ibm.com/autonomic/pdfs/AC%20Blueprint%20White%20Paper%20V7.pdf (accessed on 16 January 2023).
- Beluhova-Uzunova, R.P.; Dunchev, D.M. Precision Farming–Concepts and Perspectives. Zagadnienia Ekon. Rolnej/Problems Agric. Econ. 2019, 3, 142–155. [Google Scholar] [CrossRef]
- Roser, M.; Ritchie, H.; Ortiz-Ospina, E.; Rodés-Guirao, L. World Population Growth. Our World in Data. 2013. Available online: https://ourworldindata.org/world-population-growth (accessed on 16 January 2023).
- Roser, M.; Ortiz-Ospina, E.; Ritchie, H. Life Expectancy. Our World in Data. 2013. Available online: https://ourworldindata.org/life-expectancy (accessed on 16 January 2023).
- Ritchie, H.; Roser, M. Land Use. Our World in Data. 2013. Available online: https://ourworldindata.org/land-use (accessed on 16 January 2023).
- Auernhammer, H. Precision farming–the environmental challenge. Comput. Electron. Agric. 2001, 30, 31–43. [Google Scholar] [CrossRef]
- European Parliament, Directorate-General for Parliamentary Research Services. Precision Agriculture and the Future of Farming in Europe: Scientific Foresight Study; Schrijver, R., Poppe, K., Daheim, C., Eds.; Publications Office of the European Union: Brussels, Belgium, 2019. [Google Scholar] [CrossRef]
- European Communities. Council Directive 91/676/EEC of 12 December 1991 concerning the protection of waters against pollution caused by nitrates from agricultural sources. Off. J. Eur. Communities 1991, 375, 31. Available online: https://eur-lex.europa.eu/eli/dir/1991/676/oj (accessed on 16 January 2023).
- European Union. Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 establishing a framework for Community action to achieve the sustainable use of pesticides (Text with EEA relevance). Off. J. Eur. Union 2009, 309, 71–86. Available online: https://eur-lex.europa.eu/eli/dir/2009/128/oj (accessed on 16 January 2023).
- Food and Agriculture Organization of the United Nations. FAOSTAT: Countries by Commodity. [Website]. Available online: https://www.fao.org/faostat/en/#rankings/countries_by_commodity_exports (accessed on 16 January 2023).
- Bowditch, E.; Santopuoli, G.; Binder, F.; del Río, M.; La Porta, N.; Kluvankova, T.; Lesiński, J.; Motta, R.; Pach, M.; Panzacchi, P.; et al. What is Climate-Smart Forestry? A definition from a multinational collaborative process focused on mountain regions of Europe. Ecosyst. Serv. 2020, 43, 101113. [Google Scholar] [CrossRef]
- Feng, Y.; Audy, J.F. Forestry 4.0: A framework for the forest supply chain toward Industry 4.0. Gestão Produção 2020, 27. [Google Scholar] [CrossRef]
- Government of Canada. Canada Ranks Second among Leading Global Wood Product Exporters. Natural Resources Canada. 2018. Available online: https://cfs.nrcan.gc.ca/selective-cuttings/93 (accessed on 16 January 2023).
- World Integrated Trade Solution. [Website]. Available online: https://wits.worldbank.org/ (accessed on 16 January 2023).
- United Nations Sustainable Development Goal 15. [Website]. Available online: https://sdgs.un.org/goals/goal15 (accessed on 16 January 2023).
- Convention on the Conservation of Migratory Species of Wild Animals. [Website]. Available online: https://www.cms.int/en/convention-text (accessed on 16 January 2023).
- Convention on the Conservation of European Wildlife and Natural Habitats. [Website]. Available online: https://www.coe.int/en/web/conventions/full-list?module=treaty-detail&treatynum=104 (accessed on 16 January 2023).
- European Communities. Council Directive 92/43/EEC of 21 May 1992 on the conservation of natural habitats and of wild fauna and flora. Off. J. Eur. Communities 1992, 206, 7–50. Available online: https://eur-lex.europa.eu/eli/dir/1992/43/oj (accessed on 16 January 2023).
- European Parliament and Council. Directive 2009/147/EC of the European Parliament and of the Council of 30 November 2009 on the conservation of wild birds. Off. J. Eur. Union 2010, 20, 7–25. Available online: http://data.europa.eu/eli/dir/2009/147/oj (accessed on 16 January 2023).
- Walters, M.; Scholes, R.J. (Eds.) The GEO Handbook on Biodiversity Observation Networks; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar] [CrossRef] [Green Version]
- Cavender-Bares, J.; Gamon, J.A.; Townsend, P.A. (Eds.) Remote Sensing of Plant Biodiversity; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Singh, A.; Vyas, V. A Review on Remote Sensing application in river ecosystem evaluation. Spat. Inf. Res. 2022, 30, 759–772. [Google Scholar] [CrossRef]
- Turner, W. Sensing biodiversity. Science 2014, 346, 301–302. [Google Scholar] [CrossRef] [PubMed]
- United Nations Sustainable Development Goal 6. [Website]. Available online: https://sdgs.un.org/goals/goal6 (accessed on 16 January 2023).
- European Parliament and Council. Directive 2000/60/EC of the European European Parliament and of the Council of 23 October 2000 establishing a framework for Community action in the field of water policy. Off. J. Eur. Communities 2000, 327, 1–73. Available online: https://eur-lex.europa.eu/eli/dir/2000/60/oj (accessed on 16 January 2023).
- Janssen, V. Network RTK adding reliability to precision agriculture. Aust. Farm J. 2010, 20, 10–11. Available online: https://eprints.utas.edu.au/10297/ (accessed on 16 January 2023).
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision farming in hilly areas: The use of network RTK in GNSS technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef] [Green Version]
- Ehsani, R.; Upadhyaya, S.; Mattson, M. Seed location mapping using RTK GPS. Trans. ASAE 2004, 47, 909–914. [Google Scholar] [CrossRef]
- Kumpula, T.; Verdonen, M.; Korpelainen, P. Rapid Decay of Palsas Monitored Using RTK GPS, UAS Data and Aerial Photographs. [Website]. Available online: https://arcticbiodiversity.is/index.php/program/presentations2018/492-rapid-decay-of-palsas-monitored-using-rtk-gps-uas-data-and-aerial-photographs-timo-kumpula/file (accessed on 16 January 2023).
- Saghravani, S.R.; Mustapha, S.; Saghravani, S.F. Accuracy comparison of RTK-GPS and automatic level for height determination in land surveying. Masaum J. Rev. Surv. 2009, 1, 10–13. Available online: https://www.researchgate.net/profile/Seyed-Fazlolah-Saghravani/publication/235423752_Accuracy_comparison_of_RTK-GPS_and_automatic_level_for_height_determination_in_land_surveying/links/0deec53b4f89dbdd7d000000/Accuracy-comparison-of-RTK-GPS-and-automatic-level-for-height-determination-in-land-surveying.pdf (accessed on 16 January 2023).
- Effects of RTK Correction Data Age on Accuracy. [Website]. Available online: http://lefebure.com/articles/rtk-correction-data-age-accuracy/ (accessed on 16 January 2023).
- Walczyk, M.; Kiełbasa, P.; Zagórda, M. Pozyskanie i Wykorzystanie Informacji w Rolnictwie Precyzyjnym (Acquiring and Using Information in Precision Farming); Polskie Towarzystwo Inżynierii Rolniczej: Kraków, Poland, 2016; Available online: https://www.researchgate.net/profile/Maria-Walczykova/publication/315363365_Pozyskanie_i_wykorzystanie_informacji_w_rolnictwie_precyzyjnym_Acquiring_and_using_information_in_precision_farming/links/58cd5006aca272335515f92e/Pozyskanie-i-wykorzystanie-informacji-w-rolnictwie-precyzyjnym-Acquiring-and-using-information-in-precision-farming.pdf (accessed on 16 January 2023). (In Polish)
- Samborski, S. Rolnictwo Precyzyjne (Precision Agriculture); Wydawnictwo Naukowe PWN: Warszawa, Poland, 2018. (In Polish) [Google Scholar]
- Gołębiowski, T.; Juliszewski, T.; Kiełbasa, P.; Tomecka-Suchoń, S.; Uhl, T. Recent advancement approach for precision agriculture. In Proceedings of the Advances in Mechanism and Machine Science, IFToMM WC 2019, Krakow, Poland, 15–18 July 2019; Uhl, T., Ed.; Springer International Publishing: Cham, Switzerland, 2019; Volume 73, pp. 2907–2916. [Google Scholar] [CrossRef]
- Sparks, A.M.; Bouhamed, I.; Boschetti, L.; Gitas, I.Z.; Kalaitzidis, C. Mapping Arable Land and Permanent Agriculture Extent and Change in Southern Greece Using the European Union LUCAS Survey and a 35-Year Landsat Time Series Analysis. Remote Sens. 2022, 14, 3369. [Google Scholar] [CrossRef]
- Wuyun, D.; Sun, L.; Sun, Z.; Chen, Z.; Hou, A.; Crusiol, L.; Reymondin, L.; Chen, R.; Zhao, H. Mapping fallow fields using Sentinel-1 and Sentinel-2 archives over farming-pastoral ecotone of Northern China with Google Earth Engine. GISci. Remote Sens. 2022, 59, 333–353. [Google Scholar] [CrossRef]
- Abderrazak, B.A.; Morin, D.; Bonn, F.; Huete, A.R. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Liu, X.; Peterson, J.A.; Zhang, Z. High-Resolution DEM Generated from LiDAR Data for Water Resource Management. In Proceedings of the MODSIM 2005 International Congress on Modelling and Simulation, Melbourne, Australia, 12–15 December 2005; pp. 1402–1408. Available online: https://www.mssanz.org.au/modsim05/papers/liu_x.pdf (accessed on 16 January 2023).
- Webster, T.L. Flood Risk Mapping Using LiDAR for Annapolis Royal, Nova Scotia, Canada. Remote Sens. 2010, 2, 2060–2082. [Google Scholar] [CrossRef] [Green Version]
- Caccamo, G.; Iqbal, I.A.; Osborn, J.; Bi, H.; Arkley, K.; Melville, G.; Aurik, D.; Stone, C. Comparing Yield Estimates Derived from LiDAR and Aerial Photogrammetric Point-Cloud Data with Cut-to-Length Harvester Data in a Pinus radiata Plant. Tasmania. Aust. For. 2018, 81, 131–141. [Google Scholar] [CrossRef]
- Southee, M.; Treitz, P.; Scott, N. Application of Lidar Terrain Surfaces for Soil Moisture Modeling. Photogramm. Eng. Remote Sens. 2012, 78, 1241–1251. [Google Scholar] [CrossRef]
- Rahmani, S.R.; Ackerson, J.P.; Schulze, D.; Adhikari, K.; Libohova, Z. Digital Mapping of Soil Organic Matter and Cation Exchange Capacity in a Low Relief Landscape Using LiDAR Data. Agronomy 2022, 12, 1338. [Google Scholar] [CrossRef]
- Michałowska, M.; Rapiński, J. A Review of Tree Species Classification Based on Airborne LiDAR Data and Applied Classifiers. Remote Sens. 2021, 13, 353. [Google Scholar] [CrossRef]
- Wang, Y.; Weinacker, H.; Koch, B. A Lidar Point Cloud Based Procedure for Vertical Canopy Structure Analysis and 3D Single Tree Modelling in Forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef] [Green Version]
- National Science Foundation’s National Ecological Observatory Network (NEON). Airborne Remote Sensing: Lidar. [Website]. Available online: https://www.neonscience.org/data-collection/lidar (accessed on 16 January 2023).
- Singh, R.; Gehlot, A.; Vaseem Akram, S.; Kumar Thakur, A.; Buddhi, D.; Kumar Das, P. Forest 4.0: Digitalization of forest using the Internet of Things (IoT). J. King Saud Univ.–Comput. Inf. Sci. 2022, 34, 5587–5601. [Google Scholar] [CrossRef]
- Nixon, S.C. European Freshwater Monitoring Network Design. Topic Report No. 10/1996, European Topic Centre on Inland Waters, European Environment Agency. 1996. Available online: https://www.eea.europa.eu/publications/92-9167-023-5 (accessed on 16 January 2023).
- United States Environmental Protection Agency. Water Sensors Toolbox. [Website]. Available online: https://www.epa.gov/water-research/water-sensors-toolbox (accessed on 16 January 2023).
- Tomaszewski, L.; Kołakowski, R.; Zagórda, M. Application of Mobile Networks (5G and Beyond) in Precision Agriculture. In Proceedings of the Artificial Intelligence Applications and Innovations, AIAI 2022 IFIP WG 12.5 International Workshops, Hersonissos, Greece, 17–20 June 2022; Maglogiannis, I., Iliadis, L., Macintyre, J., Cortez, P., Eds.; Springer International Publishing: Cham, Switzerland, 2022; Volume 652, pp. 71–86. [Google Scholar] [CrossRef]
- Hsu, C.K.; Chiu, Y.H.; Wu, K.R.; Liang, J.M.; Chen, J.J.; Tseng, Y.C. Design and Implementation of Image Electronic Fence with 5G technology for Smart Farms. In Proceedings of the 2019 IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS), Singapore, 28–30 August 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, R.; Yang, Q.; Hu, T.; Guo, K.; Hong, T. Research on Application Technology of 5G Internet of Things and Big Data in Dairy Farm. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin, China, 28 June–2 July 2021; pp. 138–140. [Google Scholar] [CrossRef]
- La Hera, P.X.; Ortíz Morales, D. Model-Based Development of Control Systems for Forestry Cranes. J. Control Sci. Eng. 2015, 2015, 15. [Google Scholar] [CrossRef] [Green Version]
- Fodor, S.; Vázquez, C.; Freidovich, L. Automation of slewing motions for forestry cranes. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2015; pp. 796–801. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Dybiec, P.; Kukliński, S. Mobile Networks’ Support for Large-Scale UAV Services. Energies 2022, 15, 4974. [Google Scholar] [CrossRef]
- Martel, V.; Johns, R.C.; Jochems-Tanguay, L.; Jean, F.; Maltais, A.; Trudeau, S.; St-Onge, M.; Cormier, D.; Smith, S.M.; Boisclair, J. The Use of UAS to Release the Egg Parasitoid Trichogramma spp. (Hymenoptera: Trichogrammatidae) against an Agricultural and a Forest Pest in Canada. J. Econ. Entomol. 2021, 114, 1867–1881. [Google Scholar] [CrossRef] [PubMed]
- DroneDJ. AirSeed Technologies Works to Plant 100 Million Trees by Drones. [Website]. Available online: https://dronedj.com/2022/01/07/airseed-technologies-works-to-plant-100-million-trees-by-drones/ (accessed on 16 January 2023).
- DroneDJ. Drones to again Protect Native Island Wildlife by Eradicating Invasive Rats on Polynesian Atolls. [Website]. Available online: https://dronedj.com/2021/07/16/drones-to-again-protect-native-island-wildlife-by-eradiating-invasive-rats-on-polynesian-atolls/ (accessed on 16 January 2023).
- DroneDJ. Darwinian Drones Rid Galápagos Islands of Invasive Rats. [Website]. Available online: https://dronedj.com/2021/06/21/darwinian-drones-rid-galapagos-islands-of-invasive-rats/ (accessed on 16 January 2023).
- DroneDJ. After Rats, Galápagos Islands Drones Combat Invasive Plants. [Website]. Available online: https://dronedj.com/2022/05/16/after-rats-galapagos-islands-drones-combat-invasive-plants/ (accessed on 16 January 2023).
- Maki, J.; Guiot, A.L.; Aubert, M.; Brochier, B.; Cliquet, F.; Hanlon, C.A.; King, R.; Oertli, E.H.; Rupprecht, C.E.; Schumacher, C.; et al. Oral vaccination of wildlife using a vaccinia–rabies-glycoprotein recombinant virus vaccine (RABORAL V-RG®): A global review. Vet. Res. 2017, 48, 1–26. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- 5G!Drones: Unmanned Aerial Vehicle Vertical Applications’ Trials Leveraging Advanced 5G Facilities. [Website]. Available online: https://5gdrones.eu/ (accessed on 16 January 2023).
- Zhang, X.; Geimer, M.; Grandl, L.; Kammerbauer, B. Method for an electronic controlled platooning system of agricultural vehicles. In Proceedings of the 2009 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Pune, India, 11–12 November 2009; pp. 156–161. [Google Scholar] [CrossRef]
- Ma, Z.; Chong, K.; Ma, S.; Fu, W.; Yin, Y.; Yu, H.; Zhao, C. Control Strategy of Grain Truck Following Operation Considering Variable Loads and Control Delay. Agriculture 2022, 12, 1545. [Google Scholar] [CrossRef]
- Emmi, L.; Gonzalez-de Soto, M.; Pajares, G.; Gonzalez-de Santos, P. New Trends in Robotics for Agriculture: Integration and Assessment of a Real Fleet of Robots. Sci. World J. 2014, 2014, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Inside Autonomous Vehicles. Robotic Research Developing Off-Road Truck Platooning. [Website]. Available online: https://insideautonomousvehicles.com/robotic-research-developing-off-road-truck-platooning/ (accessed on 16 January 2023).
- Polic, M.; Car, M.; Tabak, J.; Orsag, M. Robotic Irrigation Water Management: Estimating Soil Moisture Content by Feel and Appearance. In Proceedings of the 2022 19th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 4–6 July 2022; pp. 16–22. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Forest Robotics: A State-of-the-Art Survey. Robotics 2021, 10, 53. [Google Scholar] [CrossRef]
- Grémillet, D.; Puech, W.; Garçon, V.; Boulinier, T.; Le Maho, Y. Robots in Ecology: Welcome to the machine. Open J. Ecol. 2012, 2, 49–57. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, Z.; Flavien, V.; Pierre, B. Mobile robotics for restoring degraded ecosystems. In Proceedings of the 2015 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 8–11 October 2015; pp. 273–278. [Google Scholar] [CrossRef]
- Bayat, B.; Crespi, A.; Ijspeert, A. Envirobot: A bio-inspired environmental monitoring platform. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 381–386. [Google Scholar] [CrossRef] [Green Version]
- Ahsan, M.S.; Mobarak, H.; Chy, K.N. Design and Construction of a Radio Controlled Floating Waste Collector Robot. In Proceedings of the 2020 11th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 17–19 December 2020; pp. 105–108. [Google Scholar] [CrossRef]
- Hou, X.; Lu, Y.; Dey, S. Wireless VR/AR with Edge/Cloud Computing. In Proceedings of the 2017 26th International Conference on Computer Communication and Networks (ICCCN), Vancouver, BC, Canada, 31 July–3 August 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Caserman, P.; Garcia-Agundez, A.; Gámez Zerban, A.; Göbel, S. Cybersickness in current-generation virtual reality head-mounted displays: Systematic review and outlook. Virtual Real. 2021, 25, 1153–1170. [Google Scholar] [CrossRef]
- 3GPP. Service Requirements for the 5G System; Stage 1; Technical Standard TS 22.261, ver. 19.1.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3107 (accessed on 16 January 2023).
- 3GPP. Unmanned Aerial System (UAS) Support in 3GPP; Technical Standard TS 22.125, ver. 17.6.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3545 (accessed on 16 January 2023).
- 3GPP. Service Requirements for Enhanced V2X Scenarios; Technical Standard TS 22.186, ver. 17.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 16 January 2023).
- Creaco, E.; Campisano, A.; Fontana, N.; Marini, G.; Page, P.; Walski, T. Real time control of water distribution networks: A state-of-the-art review. Water Res. 2019, 161, 517–530. [Google Scholar] [CrossRef]
- Murray, S. Real-Time Multiple Object Tracking-A Study on the Importance of Speed. arXiv 2017, arXiv:1709.03572. [Google Scholar] [CrossRef]
- Szczechowski, B. Technologia Pomiarów Fotogrametrycznych Wykorzystująca NiemetryczneZdjęcia Cyfrowe Wykonywane z Bezzałogowych, Zdalnie Sterowanych Aparatów Latających (Photogrammetric Measurement Technology Using Non-Metric Digital Photos Taken from Unmanned, Remotely Controlled Flying Vehicles); Wydawnictwo Polskiego Internetowego Informatora Geodezyjnego: Olsztyn, Poland, 2009; Available online: http://www.geomatyka.eu/publikacje/isbn9788393001002/isbn9788393001002.pdf (accessed on 16 January 2023). (In Polish)
- Coggin, D. LIDAR in Coastal Storm Surge Modeling: Modeling Linear Raised Features. Master’s Thesis, Department of Civil, Environmental, and Construction Engineering in the College of Engineering and Computer Science at the University of Central Florida, Orlando, FL, USA, 2008. Available online: https://stars.library.ucf.edu/etd/3478 (accessed on 16 January 2023).
- ITU-R. IMT Vision–Framework and Overall Objectives of the Future Development of IMT for 2020 and Beyond. Recommendation ITU-R M.2083 (09/15), International Telecommunication Union–Radiocommunication Sector. 2015. Available online: https://www.itu.int/rec/R-REC-M.2083 (accessed on 16 January 2023).
- Krause, A.; Anwar, W.; Martinez, A.B.; Stachorra, D.; Fettweis, G.; Franchi, N. Network Planning and Coverage Optimization for Mobile Campus Networks. In Proceedings of the 2021 IEEE 4th 5G World Forum (5GWF), Montreal, QC, Canada, 13–15 October 2021; pp. 305–310. [Google Scholar] [CrossRef]
- Faraci, G.; Raciti, A.; Rizzo, S.; Schembra, G. A 5G platform for Unmanned Aerial Monitoring in Rural Areas: Design and Performance Issues. In Proceedings of the 2018 4th IEEE Conference on Network Softwarization and Workshops (NetSoft), Montreal, QC, Canada, 25–29 June 2018; pp. 237–241. [Google Scholar] [CrossRef]
- Ranjha, A.; Kaddoum, G.; Dev, K. Facilitating URLLC in UAV-assisted Relay Systems with Multiple-Mobile Robots for 6G Networks: A Prospective of Agriculture 4.0. IEEE Trans. Ind. Inform. 2022, 18, 4954–4965. [Google Scholar] [CrossRef]
- Ahmed, H.; Jie, Z.; Usman, M. Lightweight Fire Detection System Using Hybrid Edge-Cloud Computing. In Proceedings of the 2021 IEEE 4th International Conference on Computer and Communication Engineering Technology (CCET), Beijing, China, 13–15 August 2021; pp. 153–157. [Google Scholar] [CrossRef]
- Muhammad, K.; Khan, S.; Elhoseny, M.; Hassan Ahmed, S.; Wook Baik, S. Efficient Fire Detection for Uncertain Surveillance Environment. IEEE Trans. Ind. Inform. 2019, 15, 3113–3122. [Google Scholar] [CrossRef]
- Liu, W.; Yang, Y.; Hao, J. Design and research of a new energy-saving UAV for forest fire detection. In Proceedings of the 2022 IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 27–29 May 2022; pp. 1303–1316. [Google Scholar] [CrossRef]
- Hussain, A.; Barua, B.; Osman, A.; Abozariba, R.; Asyhari, A.T. Low Latency and Non-Intrusive Accurate Object Detection in Forests. In Proceedings of the 2021 IEEE Symposium Series on Computational Intelligence (SSCI), Singapore, 5–7 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Kale, A.; Chaczko, Z. iMuDS: An Internet of Multimodal Data Acquisition and Analysis Systems for Monitoring Urban Waterways. In Proceedings of the 2017 25th International Conference on Systems Engineering (ICSEng), Las Vegas, NV, USA, 23 August 2017; pp. 431–437. [Google Scholar] [CrossRef]
- Chen, C.H.; Wu, Y.C.; Yu, K.P.; Hao, M.J.; Tsai, S.R. Monitoring River Pollution of Marine Environment. In Proceedings of the 2021 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Hualien, Taiwan, 16–19 November 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Gao, Z. Research on Information Sensing and Transmitting Technology for Island Using 5G System. In Proceedings of the 2022 IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 27–29 May 2022; pp. 868–871. [Google Scholar] [CrossRef]
- Modungwa, D.; Mekuria, F.; Kekana, M. Conceptual Development of an Autonomous Underwater Robot Design for Monitoring and Harvesting Invasive Weeds. In Proceedings of the 2021 IEEE AFRICON, Arusha, Tanzania, 13–15 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Gilles, F.; Toth, J. Accelerating the 5G Transition in Europe: How to Boost Investments in Transformative 5G Solutions (Main Report for the European Commission); European Investment Bank: Luxembourg, 2021. [Google Scholar] [CrossRef]
- Internet of Food & Farm 2020 (IoF2020). [Website]. Available online: https://www.iof2020.eu/ (accessed on 16 January 2023).
- 5G HEalth AquacultuRe and Transport Validation Trials (5G HEART). [Website]. Available online: https://5gheart.org/ (accessed on 16 January 2023).
- Fornes-Leal, A.; Gonzalez-Usach, R.; Palau, C.E.; Esteve, M.; Lioprasitis, D.; Priovolos, A.; Gardikis, G.; Pantazis, S.; Costicoglou, S.; Perentos, A.; et al. Deployment of 5G Experiments on Underserved Areas using the Open5GENESIS Suite. In Proceedings of the 2021 International Conference on Smart Applications, Communications and Networking (SmartNets), Glasgow, UK, 23 September 2021; pp. 1–4. [Google Scholar] [CrossRef]
- PriMO-5G: Virtual Presence in Moving Objects through 5G. [Website]. Available online: https://primo-5g.eu/ (accessed on 16 January 2023).
- ETHER: Self-Evolving Terrestrial/Non-Terrestrial Hybrid Networks. [Website]. Available online: https://www.ether-project.eu/ (accessed on 16 January 2023).
- 5G Connected Forest. [Website]. Available online: https://5gconnectedforest.org.uk/ (accessed on 16 January 2023).
- GSMA. The Future of Farming: How Mobile IoT Technologies Can Help Agriculture Feed the World; GSM Association: London, UK, 2018; Available online: https://www.gsma.com/iot/resources/chunghwa-nhr-agriculture-iot-case-study/ (accessed on 16 January 2023).
- GSMA. Smart Farming: Weed Elimination with 5G Autonomous Robots; GSM Association: London, UK, 2020; Available online: https://www.gsma.com/iot/resources/smart-farming-weed-elimination-with-5g-autonomous-robots/ (accessed on 16 January 2023).
- GSMA. Digital Dividends in Natural Resource Management; GSM Association: London, UK, 2020; Available online: https://www.gsma.com/mobilefordevelopment/resources/digital-dividends-in-natural-resource-management/ (accessed on 16 January 2023).
- GSMA. GSMA Smart Cities Guide: Water Management; GSM Association: London, UK, 2016; Available online: https://www.gsma.com/iot/resources/gsma-smart-cities-guide-water-management/ (accessed on 16 January 2023).
- 5G Americas. Mobile Communications Beyond 2020––The Evolution of 5G Towards the Next G; 5G Americas White Paper; 5G Americas: Bellevue, WA, USA, 2020; Available online: https://www.5gamericas.org/mobile-communications-beyond-2020-the-evolution-of-5g-towards-next-g/ (accessed on 16 January 2023).
- 5G Americas. Understanding 5G & Time Critical Services; 5G Americas White Paper; 5G Americas: Bellevue, WA, USA, 2022; Available online: https://www.5gamericas.org/understanding-5g-time-critical-services/ (accessed on 16 January 2023).
- 5G Americas. 5G Services Innovation; 5G Americas White Paper; 5G Americas: Bellevue, WA, USA, 2019; Available online: https://www.5gamericas.org/5g-service-innovation/ (accessed on 16 January 2023).
- Huawei. 6G: The Next Horizon from Connected People and Things to Connected Intelligence; White Paper; Huawei: Shenzhen, China, 2021; Available online: https://www-file.huawei.com/-/media/corp2020/pdf/tech-insights/1/6g-white-paper-en.pdf?la=en (accessed on 16 January 2023).
- 3GPP. System Architecture for the 5G System (5GS); Technical Standard TS 23.501, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3144 (accessed on 16 January 2023).
- 3GPP. Common API Framework for 3GPP Northbound APIs; Technical Standard TS 23.222, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3337 (accessed on 16 January 2023).
- 3GPP. Service Enabler Architecture Layer for Verticals (SEAL); Functional Architecture and Information Flows; Technical Standard TS 23.434, ver. 18.3.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3587 (accessed on 16 January 2023).
- European 5G Scoreboard. [Website]. Available online: https://5gobservatory.eu/observatory-overview/eu-scoreboard/ (accessed on 16 January 2023).
- 3GPP. NR; NR and NG-RAN Overall Description; Stage-2; Technical Standard TS 38.300, ver. 17.3.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3191 (accessed on 16 January 2023).
- 3GPP. Architecture Enhancements for 5G System (5GS) to Support Network Data Analytics Services; Technical Standard TS 23.288, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3579 (accessed on 16 January 2023).
- 3GPP. Management and Orchestration; Architecture Framework; Technical Standard TS 28.533, ver. 17.2.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3416 (accessed on 16 January 2023).
- 3GPP. 5G System (5GS) Location Services (LCS); Stage 2; Technical Standard TS 23.273, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3577 (accessed on 16 January 2023).
- 3GPP. NG Radio Access Network (NG-RAN); Stage 2 Functional Specification of User Equipment (UE) Positioning in NG-RAN; Technical Standard TS 38.305, ver. 17.3.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3310 (accessed on 16 January 2023).
- 3GPP. NR; Radio Resource Control (RRC); Protocol Specification; Technical Standard TS 38.331, ver. 17.3.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3197 (accessed on 16 January 2023).
- Esswie, A.A. Power Saving Techniques in 3GPP 5G New Radio: A Comprehensive Latency and Reliability Analysis. arXiv 2022, arXiv:2204.00834. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kukliński, S.; Kołakowski, R. A New Approach to 5G and MEC Integration. In Proceedings of the Artificial Intelligence Applications and Innovations, AIAI 2020 IFIP WG 12.5 International Workshops, Neos Marmaras, Greece, 5–7 June 2020; Maglogiannis, I., Iliadis, L., Pimenidis, E., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 585, pp. 15–24. [Google Scholar] [CrossRef]
- Univeristy of Oulu. Towards New Horizons: 6G Flagship Goals. [Website]. Available online: https://www.6gflagship.com/goals/ (accessed on 16 January 2023).
- Corici, M.I.; Franke, N.; Heyn, T.; Kontes, G.; Leyh, M.; Magedanz, T.; Maaß, U.; Mikulla, M.; Niemann, B.; Peter, M.; et al. On the Road to 6G: Drivers, Challenges and Enabling Technologies; White Paper v1.0; Fraunhofer IIS: Berlin, Germany, 2021; Available online: https://cdn0.scrvt.com/fokus/137064883186fe80/9a009606e5a4/6g-sentinel-white-paper.pdf (accessed on 16 January 2023).
- Strinati, E.C.; Barbarossa, S.; Gonzalez-Jimenez, J.L.; Kténas, D.; Cassiau, N.; Maret, L.; Dehos, C. 6G: The Next Frontier: From Holographic Messaging to Artificial Intelligence Using Subterahertz and Visible Light Communication. IEEE Veh. Technol. Mag. 2019, 14, 42–50. [Google Scholar] [CrossRef]
- Imoize, A.L.; Adedeji, O.; Tandiya, N.; Shetty, S. 6G Enabled Smart Infrastructure for Sustainable Society: Opportunities, Challenges, and Research Roadmap. Sensors 2021, 21, 1709. [Google Scholar] [CrossRef] [PubMed]
- Chauberre, N. NTN Requirements in Rel-18: Mainly Focusing on RAN Aspects. [Website]. Available online: https://global5g.org/sites/default/files/Chuberre_RAN_Rel_18_NTN.pdf (accessed on 16 January 2023).
- Zhou, Y.; Liu, L.; Wang, L.; Hui, N.; Cui, X.; Wu, J.; Peng, Y.; Qi, Y.; Xing, C. Service-aware 6G: An intelligent and open network based on the convergence of communication, computing and caching. Digit. Commun. Netw. 2020, 6, 253–260. [Google Scholar] [CrossRef]
- Alghamdi, R.; Alhadrami, R.; Alhothali, D.; Almorad, H.; Faisal, A.; Helal, S.; Shalabi, R.; Asfour, R.; Hammad, N.; Shams, A.; et al. Intelligent Surfaces for 6G Wireless Networks: A Survey of Optimization and Performance Analysis Techniques. IEEE Access 2020, 8, 202795–202818. [Google Scholar] [CrossRef]
- Saadi, M. 6G: The Network Of Technology Convergence; White Paper; ABI Research: Oyster Bay, NY, USA, 2022; Available online: https://www.6gworld.com/wp-content/uploads/2022/02/6G_The_Network_of_Technology_Convergence_ABI_Jan2022.pdf (accessed on 16 January 2023).
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Magedanz, T.; Corici, M.I. Getting Ready for 6G Research–Understanding Technological Drivers towards 6G and Emerging 6G Management Requirements; Tutorial at IEEE/IFIP NOMS, 25 April 2022; Fraunhofer FOKUS: Berlin, Germany, 2022; Available online: https://owncloud.fokus.fraunhofer.de/index.php/s/4oIylfMlANQTZCB/download (accessed on 16 January 2023).
- Tariq, F.; Khandaker, M.R.A.; Wong, K.K.; Imran, M.A.; Bennis, M.; Debbah, M. A Speculative Study on 6G. IEEE Wirel. Commun. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Rajatheva, N.; Atzeni, I.; Bjornson, E.; Bourdoux, A.; Buzzi, S.; Dore, J.B.; Erkucuk, S.; Fuentes, M.; Guan, K.; Hu, Y.; et al. White Paper on Broadband Connectivity in 6G. arXiv 2020, arXiv:2004.14247. [Google Scholar] [CrossRef]
- Kokkoniemi, J.; Lehtomäki, J.; Juntti, M. Measurements on penetration loss in terahertz band. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Tripathi, S.; Sabu, N.V.; Gupta, A.K.; Dhillon, H.S. Millimeter-Wave and Terahertz Spectrum for 6G Wireless. In 6G Mobile Wireless Networks; Wu, Y., Singh, S., Taleb, T., Roy, A., Dhillon, H.S., Kanagarathinam, M.R., De, A., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 83–121. [Google Scholar] [CrossRef]
- 3GPP. NR; User Equipment (UE) Radio Transmission and Reception; Part 1: Range 1 Standalone; Technical Standard TS 38.101-1, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3283 (accessed on 16 January 2023).
- 3GPP. NR; User Equipment (UE) Radio Transmission and Reception; Part 2: Range 2 Standalone; Technical Standard TS 38.101-2, ver. 18.0.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3284 (accessed on 16 January 2023).
- Samsung Research. 6G Spectrum: Expanding the Frontier; White Paper; Samsung Research: Seoul, Republic of Korea, 2022; Available online: https://cdn.codeground.org/nsr/downloads/researchareas/2022May_6G_Spectrum.pdf (accessed on 16 January 2023).
- 3GPP. Architecture Enhancements for 5G System (5GS) to Support Vehicle-to-Everything (V2X) Services; Technical Standard TS 23.287, ver. 17.5.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3578 (accessed on 16 January 2023).
- 3GPP Release 16. [Website]. Available online: https://www.3gpp.org/specifications-technologies/releases/release-16 (accessed on 16 January 2023).
- 3GPP Release 17. [Website]. Available online: https://www.3gpp.org/specifications-technologies/releases/release-17 (accessed on 16 January 2023).
- 3GPP Release 18. [Website]. Available online: https://www.3gpp.org/specifications-technologies/releases/release-18 (accessed on 16 January 2023).
- GSMA. Road to 5G: Introduction and Migration; GSM Association: London, UK, 2018; Available online: https://www.gsma.com/futurenetworks/wp-content/uploads/2018/04/Road-to-5G-Introduction-and-Migration_FINAL.pdf (accessed on 16 January 2023).
- Chochliouros, I.P.; Spiliopoulou, A.S.; Lazaridis, P.; Dardamanis, A.; Zaharis, Z.; Kostopoulos, A. Dynamic Network Slicing: Challenges and Opportunities. In Proceedings of the Artificial Intelligence Applications and Innovations, AIAI 2020 IFIP WG 12.5 International Workshops, Neos Marmaras, Greece, 5–7 June 2020; Maglogiannis, I., Iliadis, L., Pimenidis, E., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 47–60. [Google Scholar] [CrossRef]
- 5G HarmoniseD Research and TrIals for Service Evolution between EU and China (5G-DRIVE). Deliverable D4.4: Final Report of V2X Trials. Available online: https://5g-drive.eu/wp-content/uploads/2021/08/5GD-D4.4_Final-report-of-V2X-trials.pdf (accessed on 16 January 2023).
- ETSI. Multi-Access Edge Computing (MEC); Application Mobility Service API; Group Specification GS MEC 021 V2.1.1; European Telecommunications Standards Institute, Sophia Antipolis: Valbonne, France, 2020. [Google Scholar]
- Sollfrank, M.; Loch, F.; Denteneer, S.; Vogel-Heuser, B. Evaluating Docker for Lightweight Virtualization of Distributed and Time-Sensitive Applications in Industrial Automation. IEEE Trans. Ind. Inform. 2021, 17, 3566–3576. [Google Scholar] [CrossRef]
- Oljira, D.B.; Brunstrom, A.; Taheri, J.; Grinnemo, K.J. Analysis of Network Latency in Virtualized Environments. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- O-RAN Alliance. O-RAN Use Cases and Deployment Scenarios; White Paper; Open RAN Alliance: Alfter, Germany, 2020; Available online: https://assets-global.website-files.com/60b4ffd4ca081979751b5ed2/60e5aff9fc5c8d496515d7fe_O-RAN%2BUse%2BCases%2Band%2BDeployment%2BScenarios%2BWhitepaper%2BFebruary%2B2020.pdf (accessed on 16 January 2023).
- Kukliński, S.; Tomaszewski, L.; Kołakowski, R. On O-RAN, MEC, SON and Network Slicing integration. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps, 2020), Taipei, Taiwan, 8–10 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Korzec, P. On 5G Support of Cross-Border UAV Operations. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]

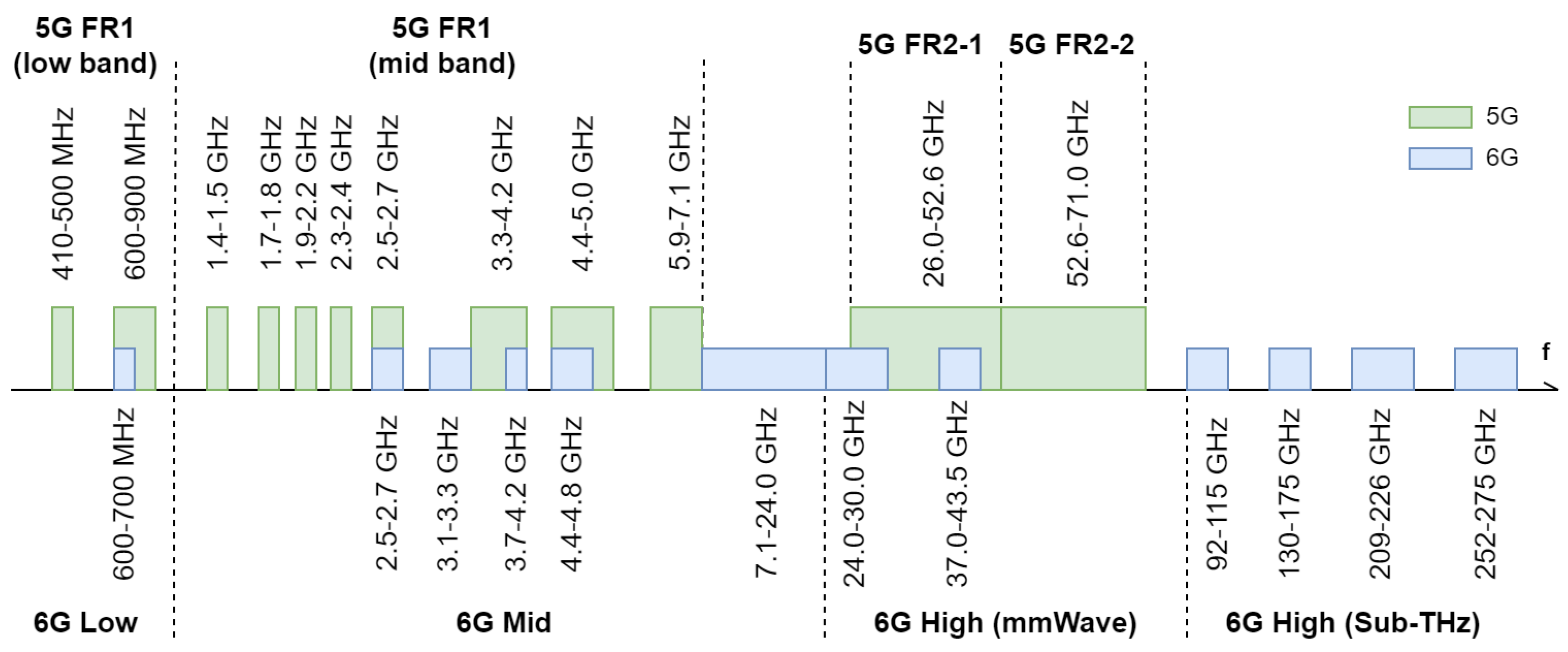{kind=link}
| Use Case | Sector | |||
|---|---|---|---|---|
| Smart Agriculture | Smart Forestry | Biodiversity Monitoring | Water Management | |
| UC1 | ✓ | ✓ | ✓ | |
| UC2 | ✓ | ✓ | ||
| UC3 | ✓ | ✓ | ✓ | |
| UC4 | ✓ | ✓ | ✓ | ✓ |
| UC5 | ✓ | |||
| UC6 | ✓ | ✓ | ✓ | ✓ |
| UC7 | ✓ | ✓ | ✓ | |
| UC8 | ✓ | ✓ | ✓ | ✓ |
| UC9 | ✓ | ✓ | ||
| UC10 | ✓ | ✓ | ✓ | |
| UC11 | ✓ | ✓ | ✓ | ✓ |
| UC12 | ✓ | ✓ | ||
| UC13 | ✓ | ✓ | ✓ | ✓ |
| UC14 | ✓ | ✓ | ✓ | ✓ |
| Use Case | Parameters | |||||
|---|---|---|---|---|---|---|
| Exchange Intensity | Exchange Type | Data Rate | Max. Delay | Reliability | ||
| UC1 | high | stream | 2.4 kbps | — | high | |
| UC2 * | low | burst | ≤1 kbps | — | low | |
| UC3 | S1: photogrammetry * | high | burst | ∼Gbps | 200 ms | low |
| S2: local sensing | low | burst | ≤1 kbps | — | low | |
| UC4 | high | burst | ∼Gbps | — | low | |
| UC5 * | low | burst | ≤1 kbps | — | low | |
| UC6 | low | burst | ≤1 kbps | — | low | |
| UC7 | high | stream | 120 Mbps | ∼ms | high | |
| UC8 ** | high | stream | 120 Mbps | 20 ms | 99.99% | |
| UC9 * | low | burst | ∼Mbps | — | low | |
| UC10 | high | burst | ∼Mbps | ∼ms | very high | |
| UC11 ** | S1: C2 | high | stream | 28 kbps | 40 ms | 99.9% |
| S2: UTM | low | stream | ∼kbps | 500 ms | 99.9% | |
| S3: FPV, video streaming | high | stream | 120 Mbps | 20 ms | 99.99% | |
| UC12 ** | high | stream | 65 Mbps | 20 ms | 99.99% | |
| UC13 ** | high | burst | 1.1 Gbps | 2 ms *** | 99.9% | |
| UC14 ** | high | stream | 0.1–1 Gbps | 10 ms | 99.99% | |
| Key Performance Indicator (KPI) | Mobile Network | ||
|---|---|---|---|
| 4G | 5G | 6G | |
| Peak data rate [Gbps] | 1 | 20 | 1000 |
| User-experienced data rate [Mbps] | 10 | 100 | 1000 |
| Spectrum efficiency [bps/Hz] | 6 | 20 | 100 |
| Mobility [kmh] | 350 | 500 | 1000 |
| Latency [ms] | 10 | 1 | 0.1 |
| Connection density [devices/km2] | 105 | 106 | 107 |
| Area traffic capacity [Mbps/m2] | 0.1 | 10 | 1000 |
| Network energy efficiency | 1× | 100× | 200× |
| Reliability | – | 10−5 | 10−7 |
| SST | Use Cases | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UC1 | UC2 | UC3:S1 | UC3:S2 | UC4 | UC5 | UC6 | UC7 | UC8 | UC9 | UC10 | UC11:S1 | UC11:S2 | UC11:S3 | UC12 | UC13 | UC14 | |
| eMBB | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||
| MIoT | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||||
| URLLC | ✓ | ✓ | ✓ | ✓ | |||||||||||||
| V2X | ✓ | ||||||||||||||||
| HMTC | ✓ | ||||||||||||||||
| 5QI | Resource Type | Priority Level | Delay | Packet Error | Max. Data Burst Volume | Use Case ID |
|---|---|---|---|---|---|---|
| 6 | Non-GBR | 60 | 300 ms | 10−6 | N/A | UC2, UC5, UC9 |
| 7 | GBR | 70 | 100 ms | 10−3 | N/A | UC3:S1, UC4 |
| 8 | Non-GBR | 80 | 300 ms | 10−6 | N/A | UC3:S2 |
| 70 | Non-GBR | 55 | 200 ms | 10−6 | N/A | UC6, UC11:S2 |
| 80 | Non-GBR | 68 | 10 ms | 10−6 | N/A | UC8, UC11:S3, UC14 |
| 82 | Delay-critical GBR | 19 | 10 ms | 10−4 | N/A | UC1, UC10 |
| 83 | Delay-critical GBR | 22 | 10 ms | 10−4 | N/A | UC11:S1,UC12 |
| 88 | Delay-critical GBR | 25 | 10 ms | 10−3 | 1125 bytes | UC7 |
| 90 (PQI) | Delay-critical GBR | 25 | 10 ms | 10−4 | 2000 bytes | UC12 (direct D2D communication) [146] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomaszewski, L.; Kołakowski, R. Mobile Services for Smart Agriculture and Forestry, Biodiversity Monitoring, and Water Management: Challenges for 5G/6G Networks. Telecom 2023, 4, 67-99. https://doi.org/10.3390/telecom4010006
Tomaszewski L, Kołakowski R. Mobile Services for Smart Agriculture and Forestry, Biodiversity Monitoring, and Water Management: Challenges for 5G/6G Networks. Telecom. 2023; 4(1):67-99. https://doi.org/10.3390/telecom4010006
Chicago/Turabian StyleTomaszewski, Lechosław, and Robert Kołakowski. 2023. "Mobile Services for Smart Agriculture and Forestry, Biodiversity Monitoring, and Water Management: Challenges for 5G/6G Networks" Telecom 4, no. 1: 67-99. https://doi.org/10.3390/telecom4010006