
RTL-DEVS: HDL Design and Simulation Methodology for DEVS Formalism-Based Simulation Tool

Abstract
:1. Introduction
2. Hardware Representation Requirements
2.1. HDL Requirement
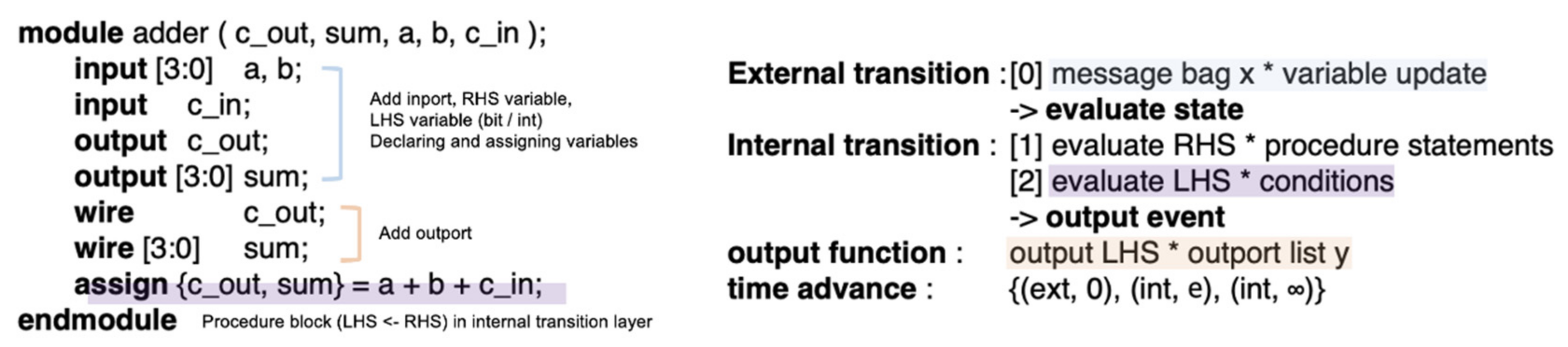
2.2. DEVS Formalism for Verilog Semantics
2.3. RTL-DEVS Atomic Model
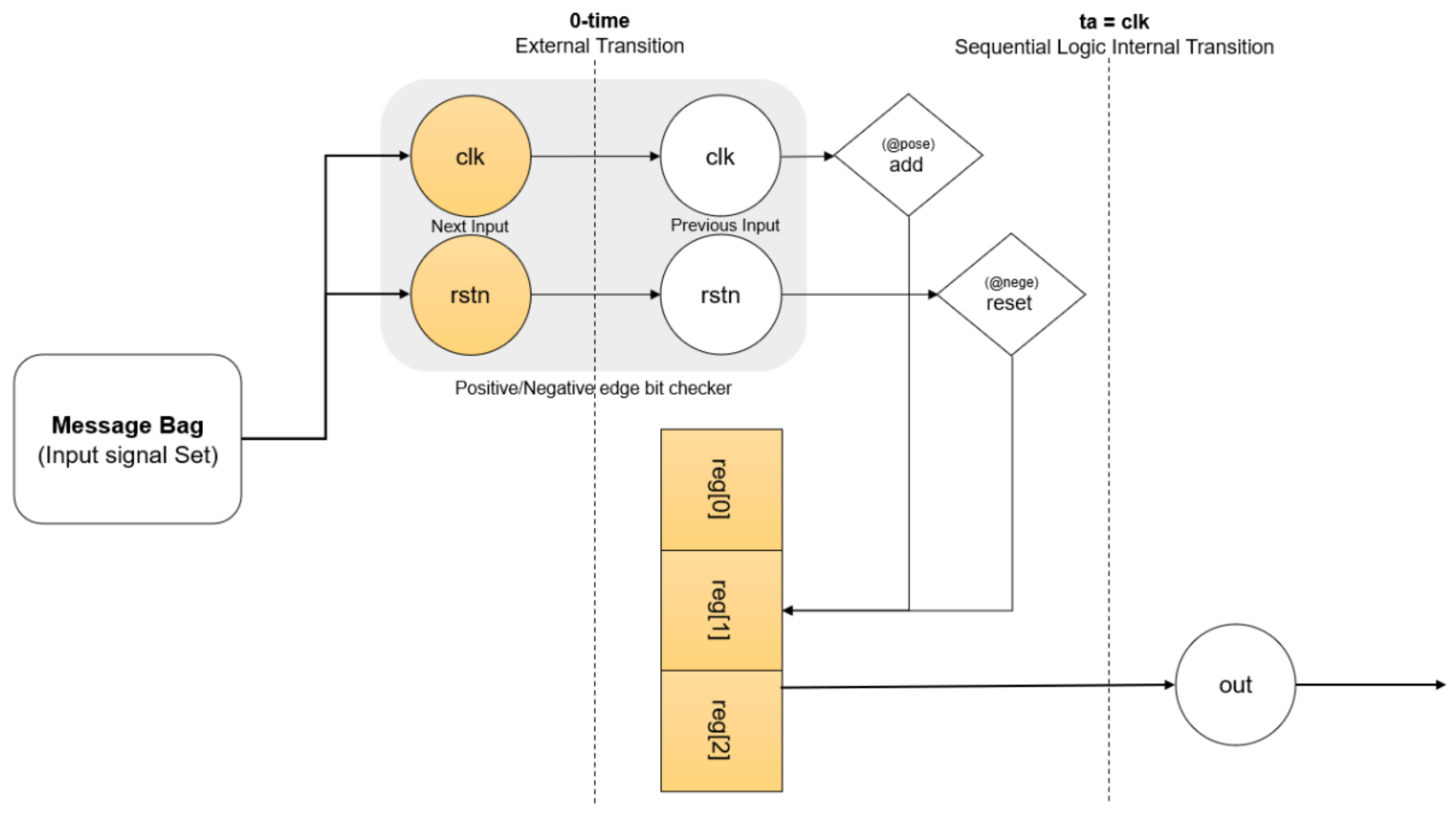
2.3.1. Model I/O Control and Transitions
2.3.2. Positive and Negative Edge Trigger
2.3.3. Procedure Block Processing between External/Internal Transition
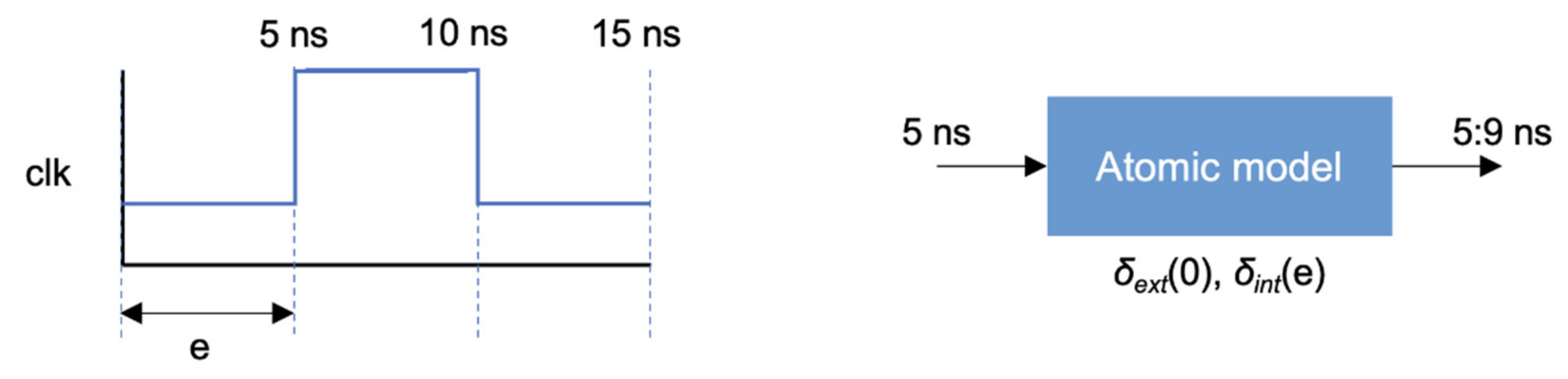
2.3.4. Delay Control
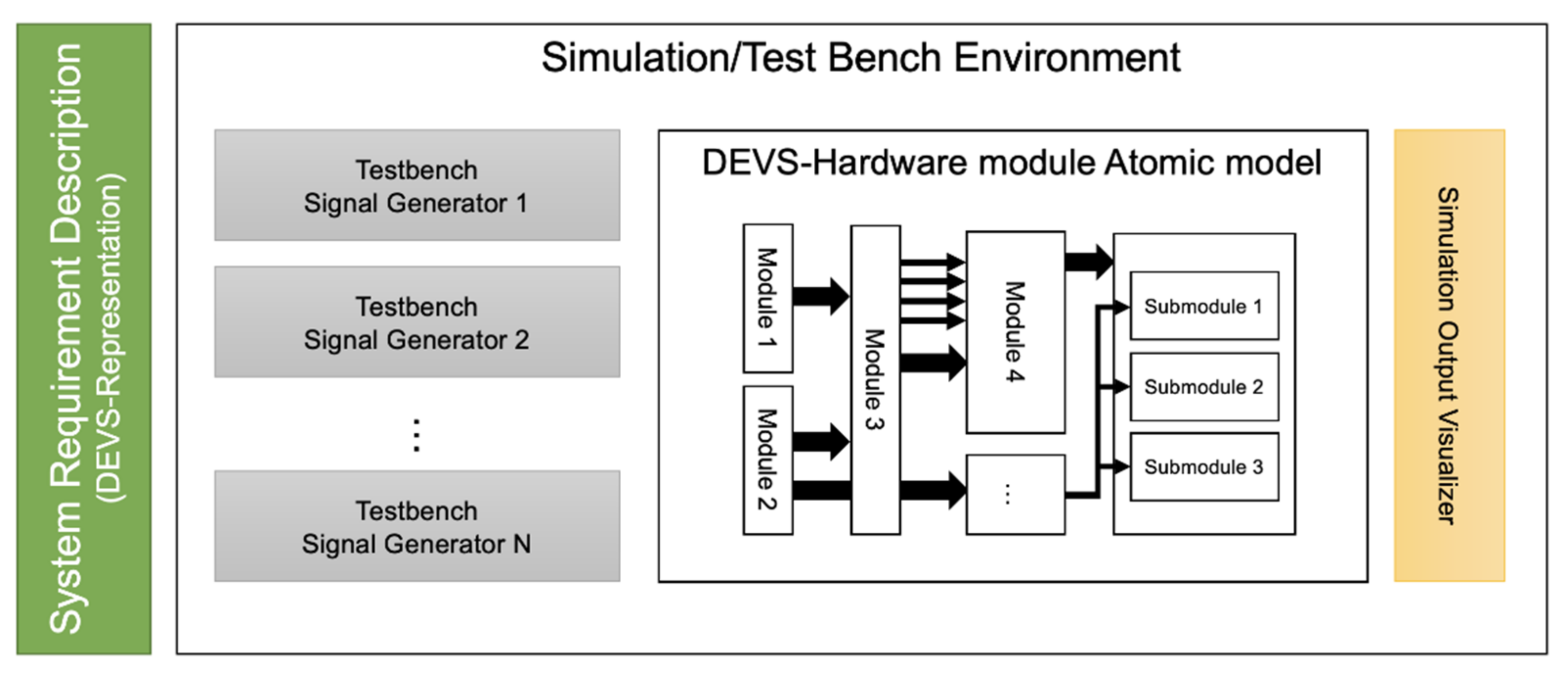
3. Testbench Modeling for RTL-DEVS Model Simulation
3.1. Sequential Logic Simulation Testbench
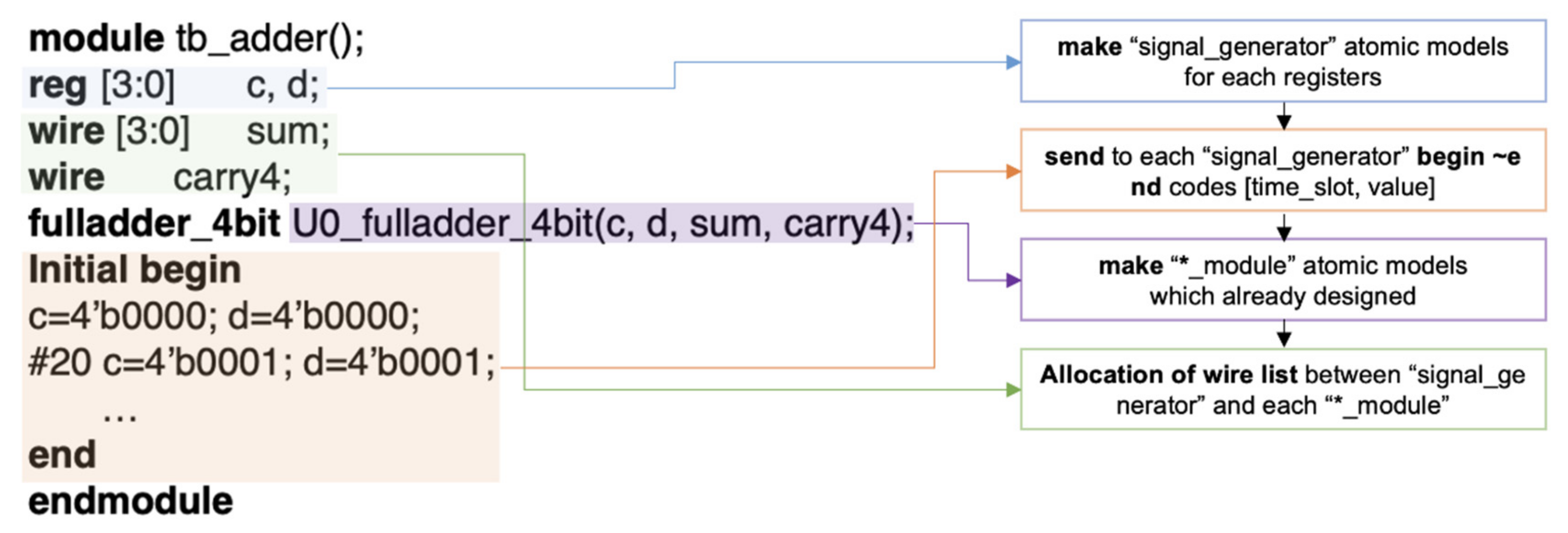
3.2. Cominational Logic Simulation Testbench
3.3. Testbench Digraph Model Representation
4. Experimental Results of RTL-DEVS Abstract Simulation
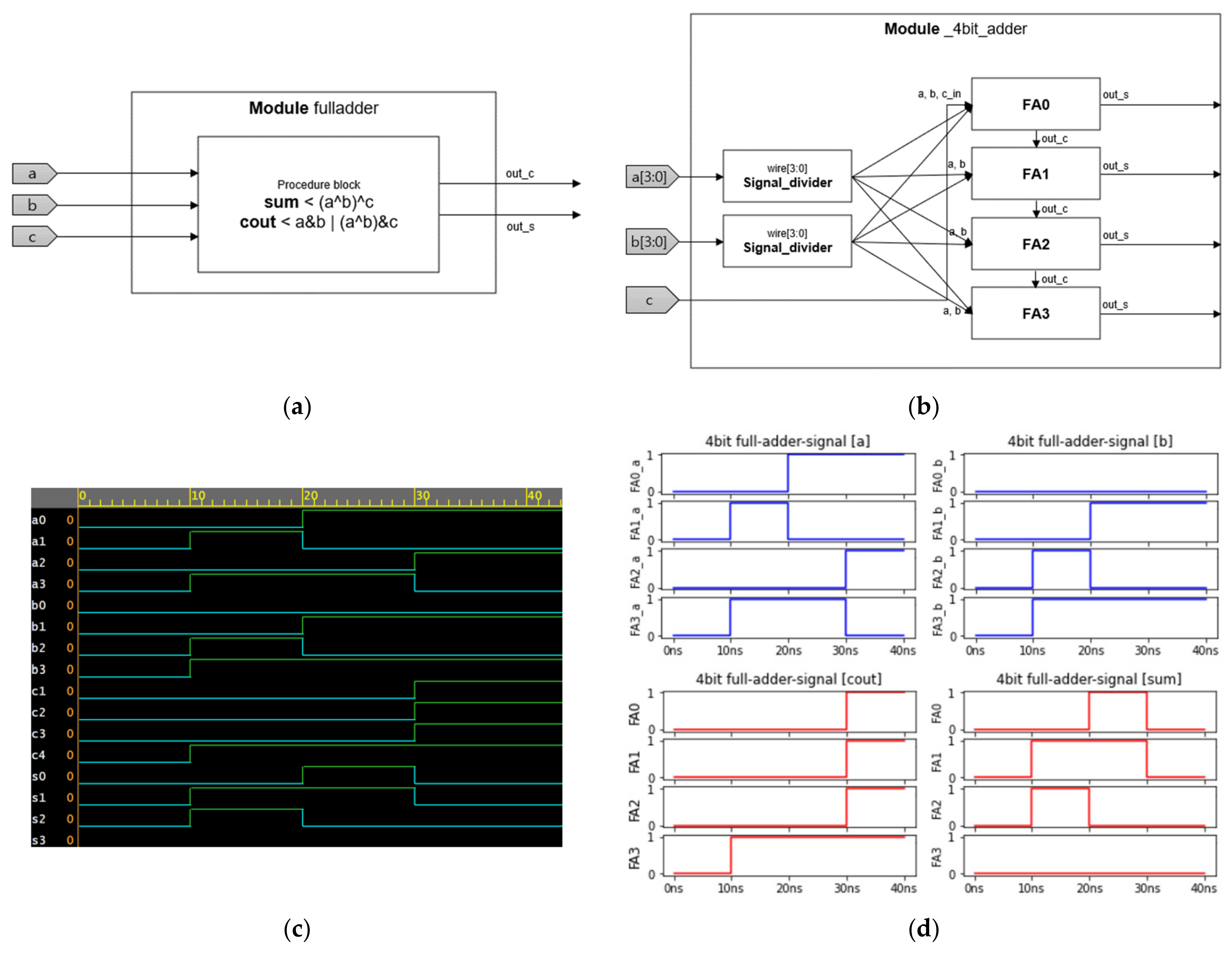
4.1. Logic-Gate Level Simulation Result
4.2. Combinational Logic Simulation Result
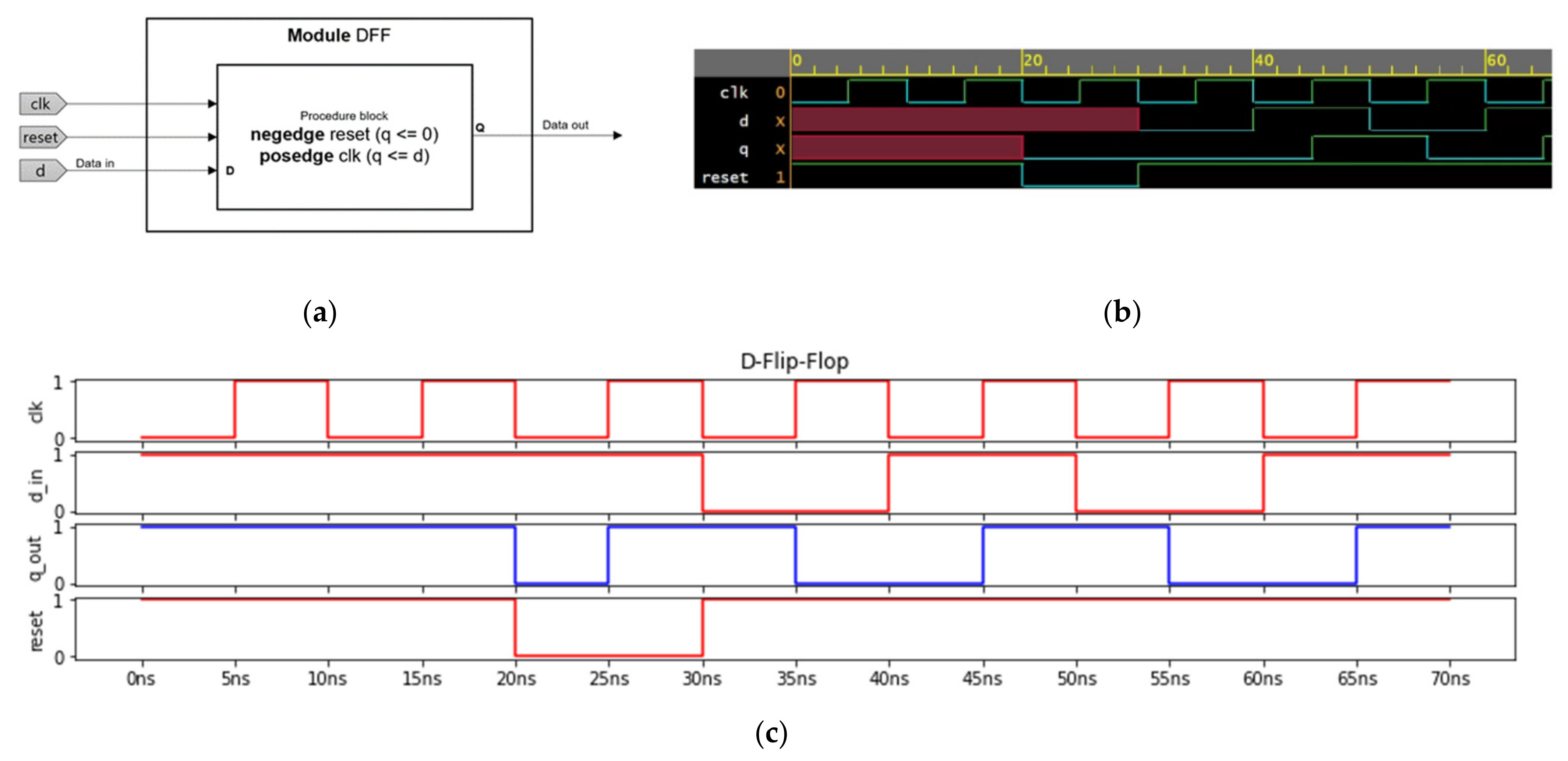
4.3. Sequential Logic Simulation Result
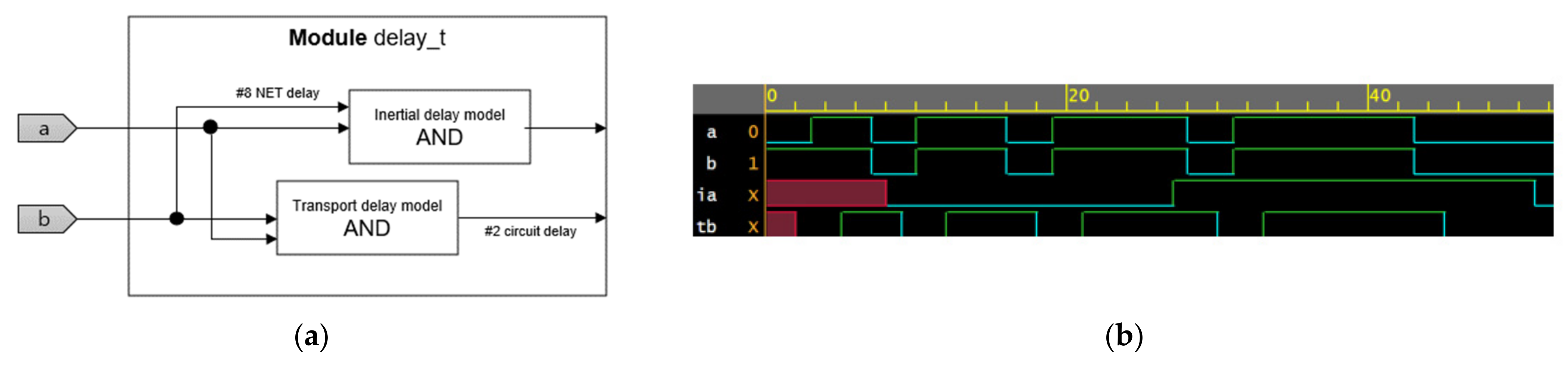
4.4. Time Delay Simulation Result
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tallaksen, E. UVVM—The Fastest Growing FPGA Verification Methodology Worldwide! In Proceedings of the 2019 Workshop on Open Source Design Automation (OSDA), 2019 Design, Automation and Test in Europe Conference (DATE), Florence, Italy, 29 March 2019; Available online: https://osda.gitlab.io/19/tallaksen.pdf (accessed on 25 November 2020).
- Muñoz-Quijada, M.; Sanz, L.; Guzman-Miranda, H. SW-VHDL Co-Verification Environment Using Open Source Tools. Electronics 2020, 9, 2104. [Google Scholar] [CrossRef]
- Molter, H.G.; Seffrin, A.; Huss, S.A. DEVS2VHDL: Automatic Transformation of XML specified DEVS Model of Computation into Synthesizable VHDL Code. In Proceedings of the 12th Forum on Specification and Design Languages (FDL 2009), Sophia Antipolis, France, 22–24 September 2009. [Google Scholar]
- Kwon, S.J.; Sung, C.; Song, H.S.; Kim, T.G. Integrated Hybrid Modeling Methodology and Simulation Engine Design Based on HDEVS Formalism. J. Korea Soc. Simul. 2013, 22, 21–30. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.G.; Kim, J.K.; Kim, Y.G. DHMIF: DEVS-based hardware model interchange format. In Proceedings of the European Simulation Symposium, Marseille, France, 18–20 October 2001. [Google Scholar]
- Jiang, S.; Pan, P.; Ou, Y.; Batten, C. PyMTL3: A Python Framework for Open-Source Hardware Modeling, Generation, Simulation, and Verification. IEEE Micro 2020, 40, 58–66. [Google Scholar] [CrossRef]
- Pifer, T.J. DEVS-Based Hardware Design, Synthesis, and Power Optimization Using Explicit Time Specifications and Deterministic Path-Based Latency. Master’s Thesis, University of Arizona, Tucson, AZ, USA, 2012. [Google Scholar]
- Seo, C.; Zeigler, B.P.; Coop, R.; Kim, D. DEVS modeling and simulation methodology with MS4 Me software tool. In Proceedings of the Symposium on Theory of Modeling & Simulation—DEVS Integrative M&S Symposium (DEVS 13), Society for Computer Simulation International, San Diego, CA, USA, 7–10 April 2013; pp. 1–8. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | Requirements | |
|---|---|---|
| Sequential/ Combinational | Combinational | Output evaluation for the input with delay (feedback free, no state) |
| Sequential | State representation, state transition, timing for state transition | |
| Synthesis | RTL description | State representation, state transition with timing property |
| Gate-level description | Gate behavior with propagation delay, network of gates | |
| Level of Abstraction | Behavioral | Concurrency, state transition |
| Structural | Modular/hierarchical modeling | |
| Others | Formal verification, Separation of interface and behavior | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, B.-S.; Jung, S.-W.; Noh, Y.-D.; Lee, J.-S.; Han, Y.-S. RTL-DEVS: HDL Design and Simulation Methodology for DEVS Formalism-Based Simulation Tool. Telecom 2023, 4, 15-30. https://doi.org/10.3390/telecom4010002
Kwon B-S, Jung S-W, Noh Y-D, Lee J-S, Han Y-S. RTL-DEVS: HDL Design and Simulation Methodology for DEVS Formalism-Based Simulation Tool. Telecom. 2023; 4(1):15-30. https://doi.org/10.3390/telecom4010002
Chicago/Turabian StyleKwon, Bo-Seung, Sang-Won Jung, Young-Dan Noh, Jong-Sik Lee, and Young-Shin Han. 2023. "RTL-DEVS: HDL Design and Simulation Methodology for DEVS Formalism-Based Simulation Tool" Telecom 4, no. 1: 15-30. https://doi.org/10.3390/telecom4010002