
Efficient Hydrodynamic Modelling of Urban Stormwater Systems for Real-Time Applications


Abstract
:1. Introduction
2. Hydrodynamic/Hydraulic Modelling
2.1. Description of the Channel Components
- Retention basins;
- Open and piped channels;
- Hydraulic structures;
- Catchments.
2.2. Efficient Modelling of Surface Flows
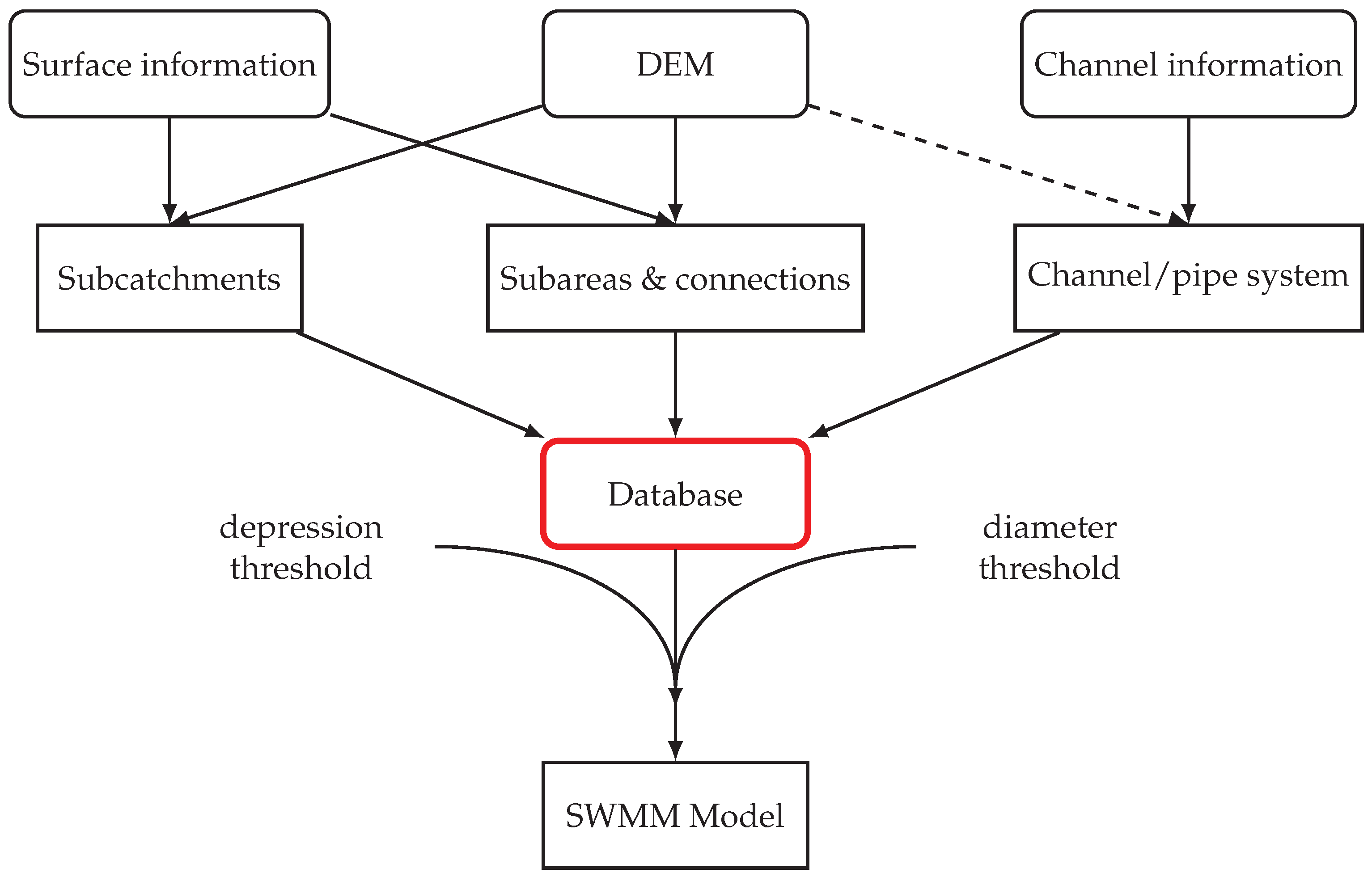
2.3. Data Processing
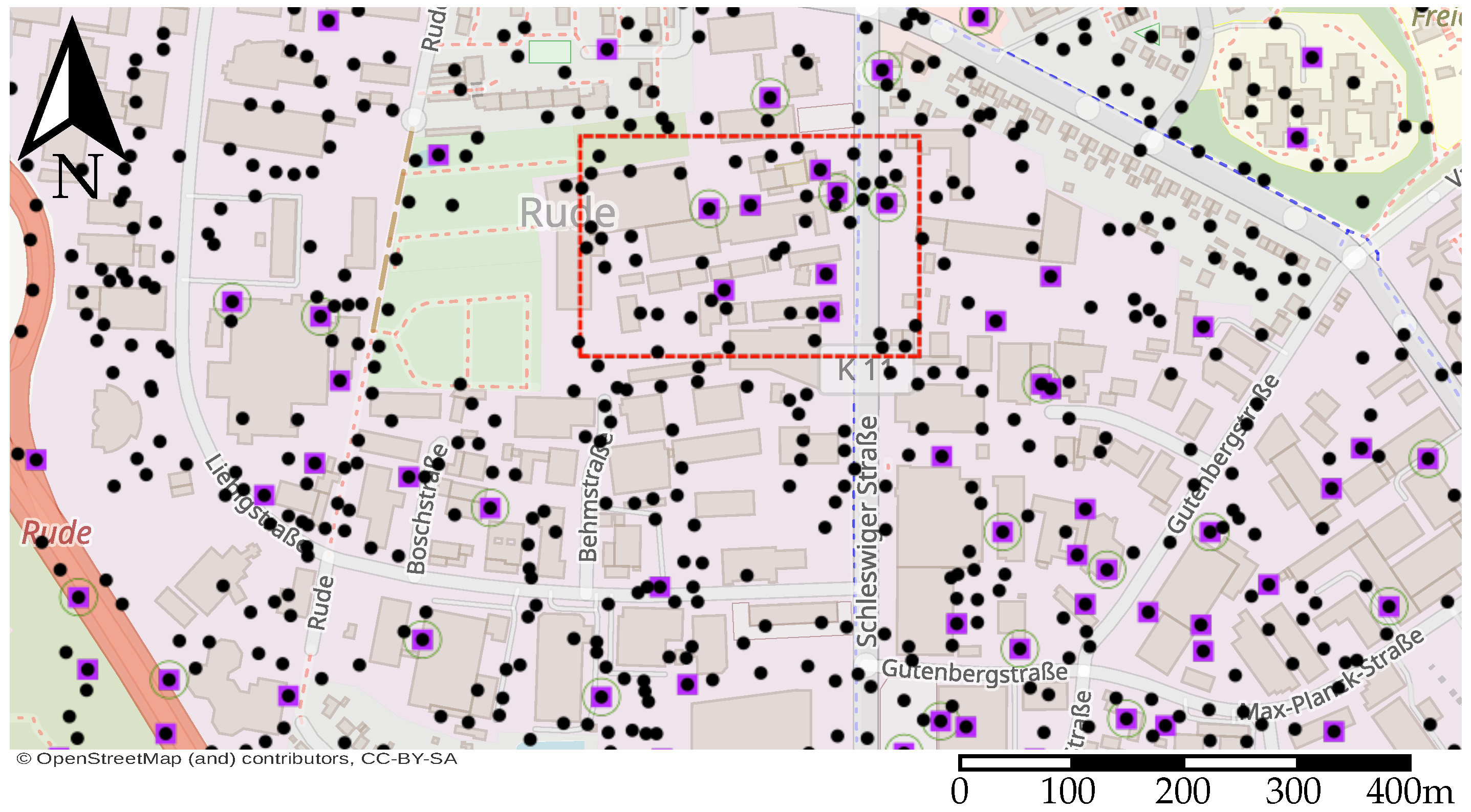
2.4. Application of Stormwater System Modelling in Flensburg
2.4.1. Characteristics of the Case Study Area
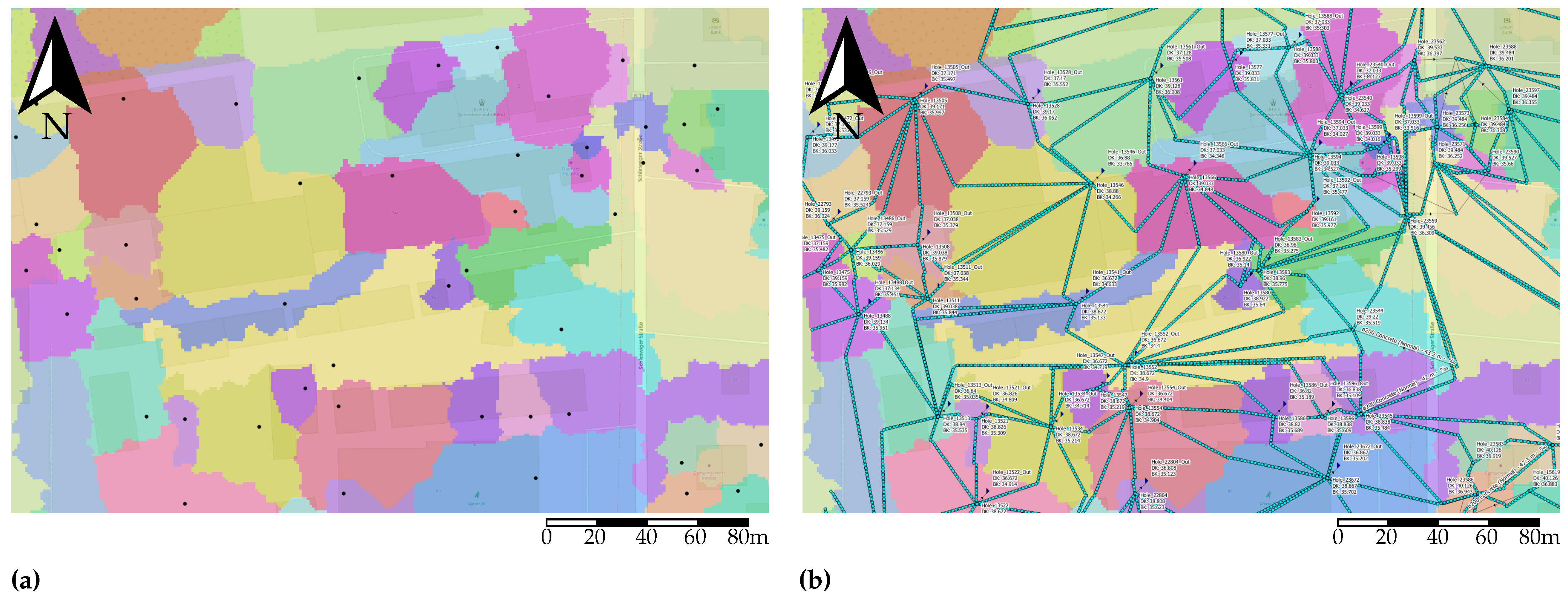
2.4.2. Developement of the SWMM Model
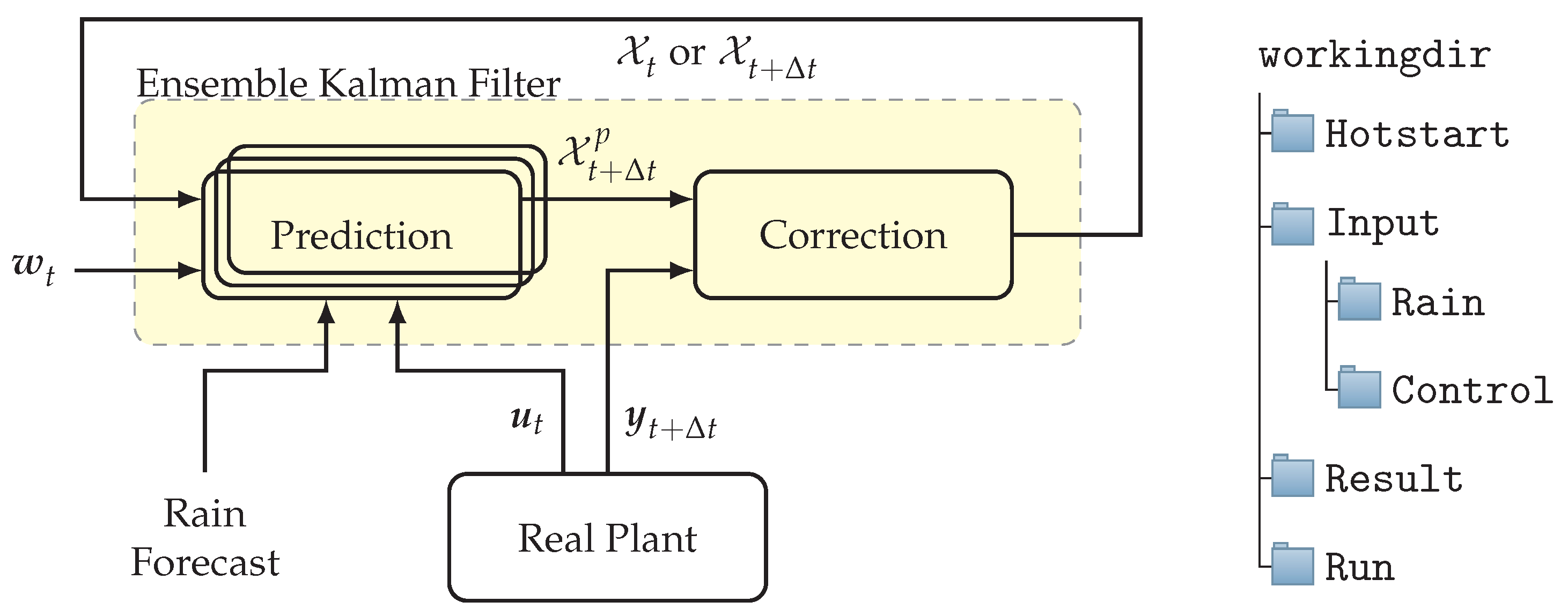
3. Data Assimilation
3.1. General Idea
3.2. Implementation in Forecasting System
4. Results
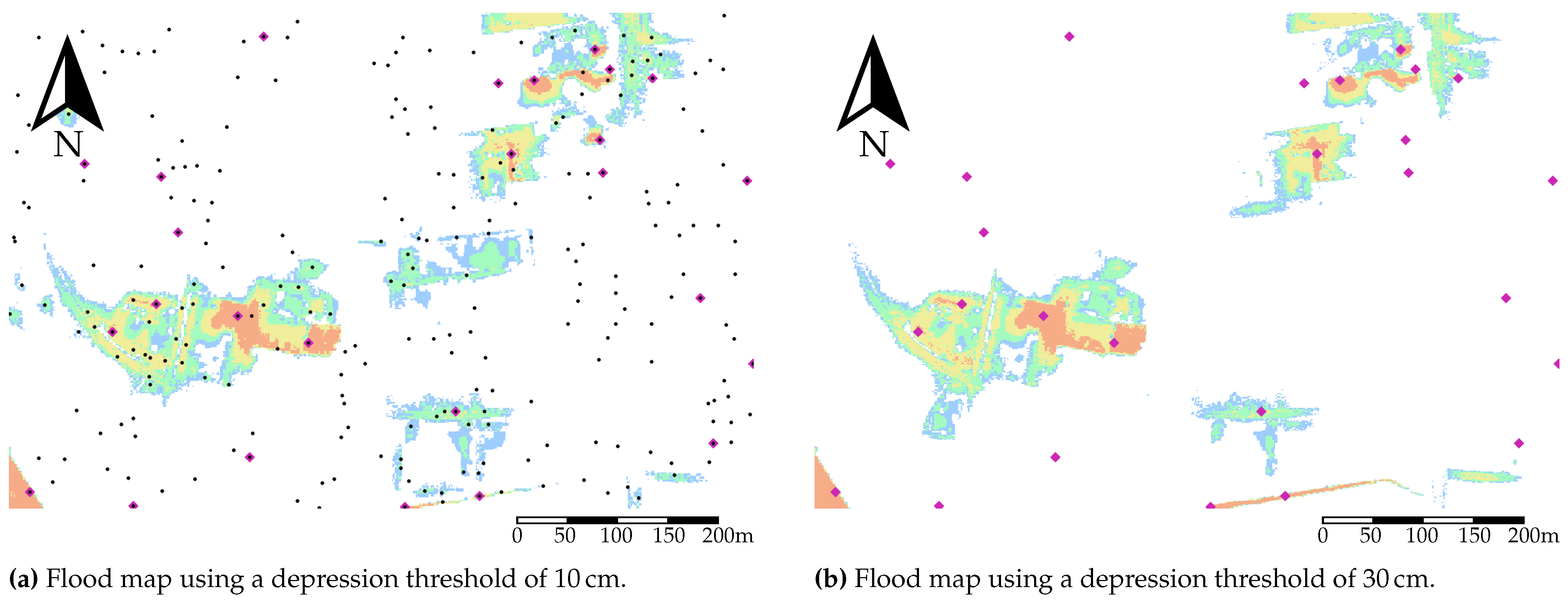
4.1. Results of 1D1D Surface Modeling
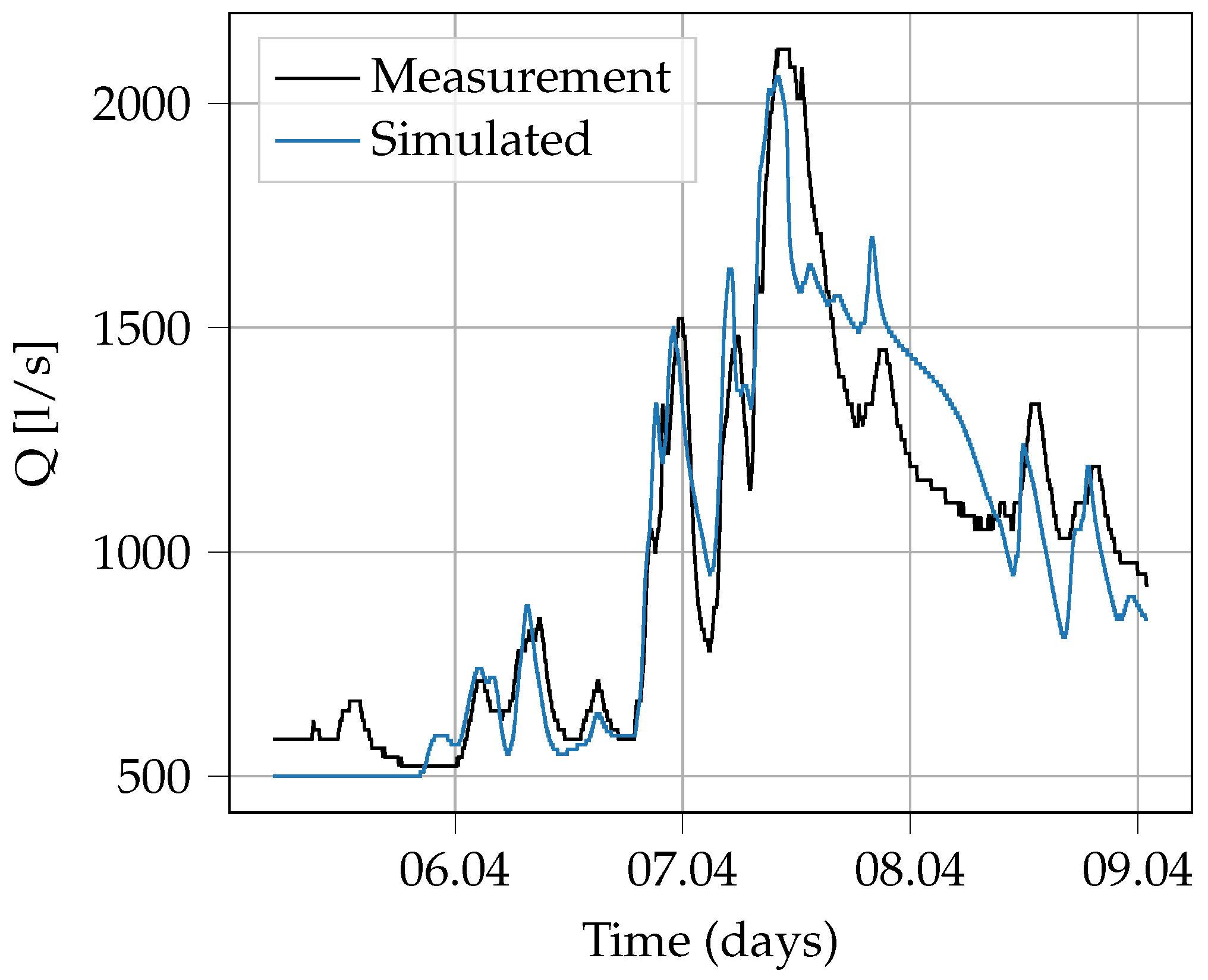
4.2. Results of System Monitoring

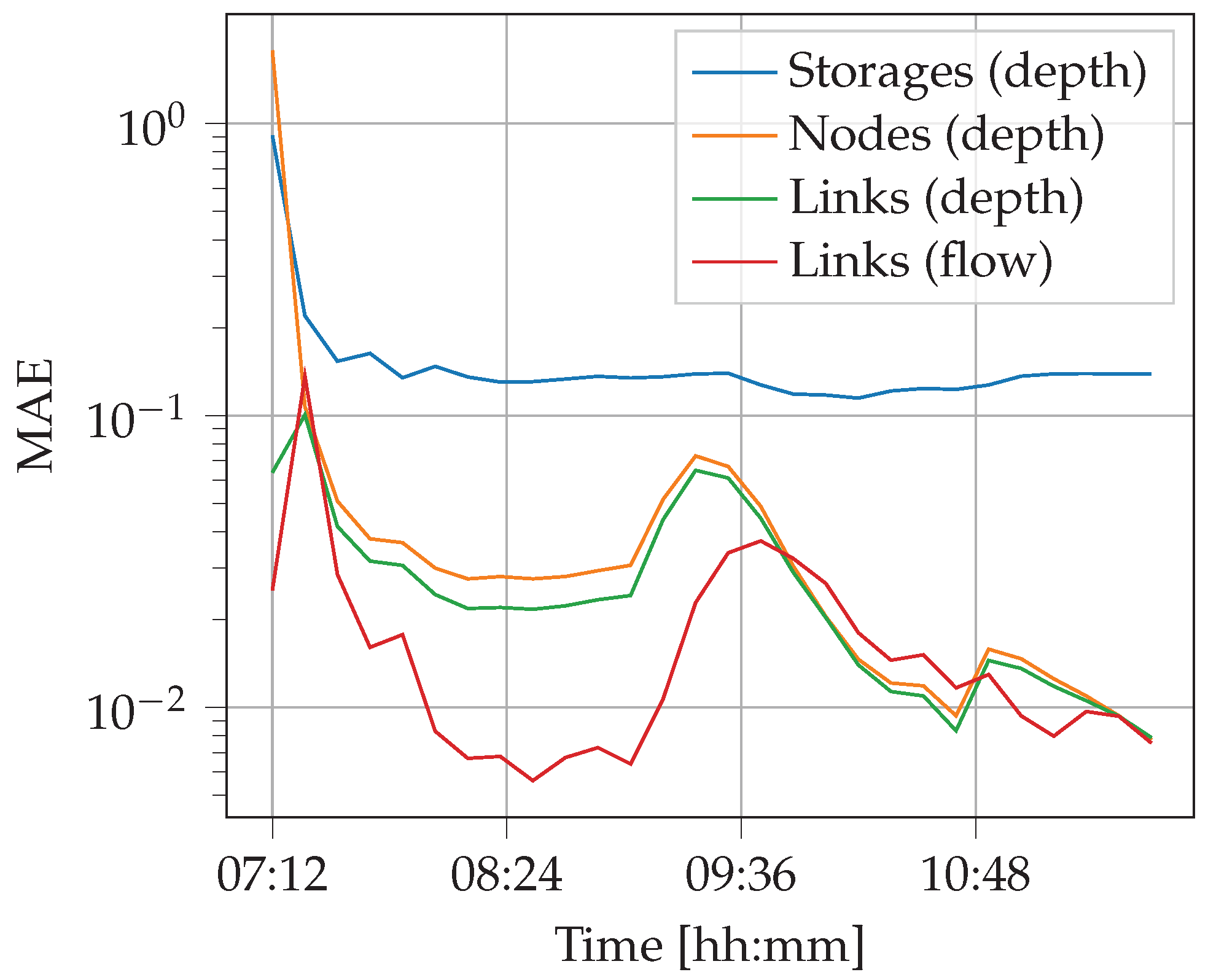
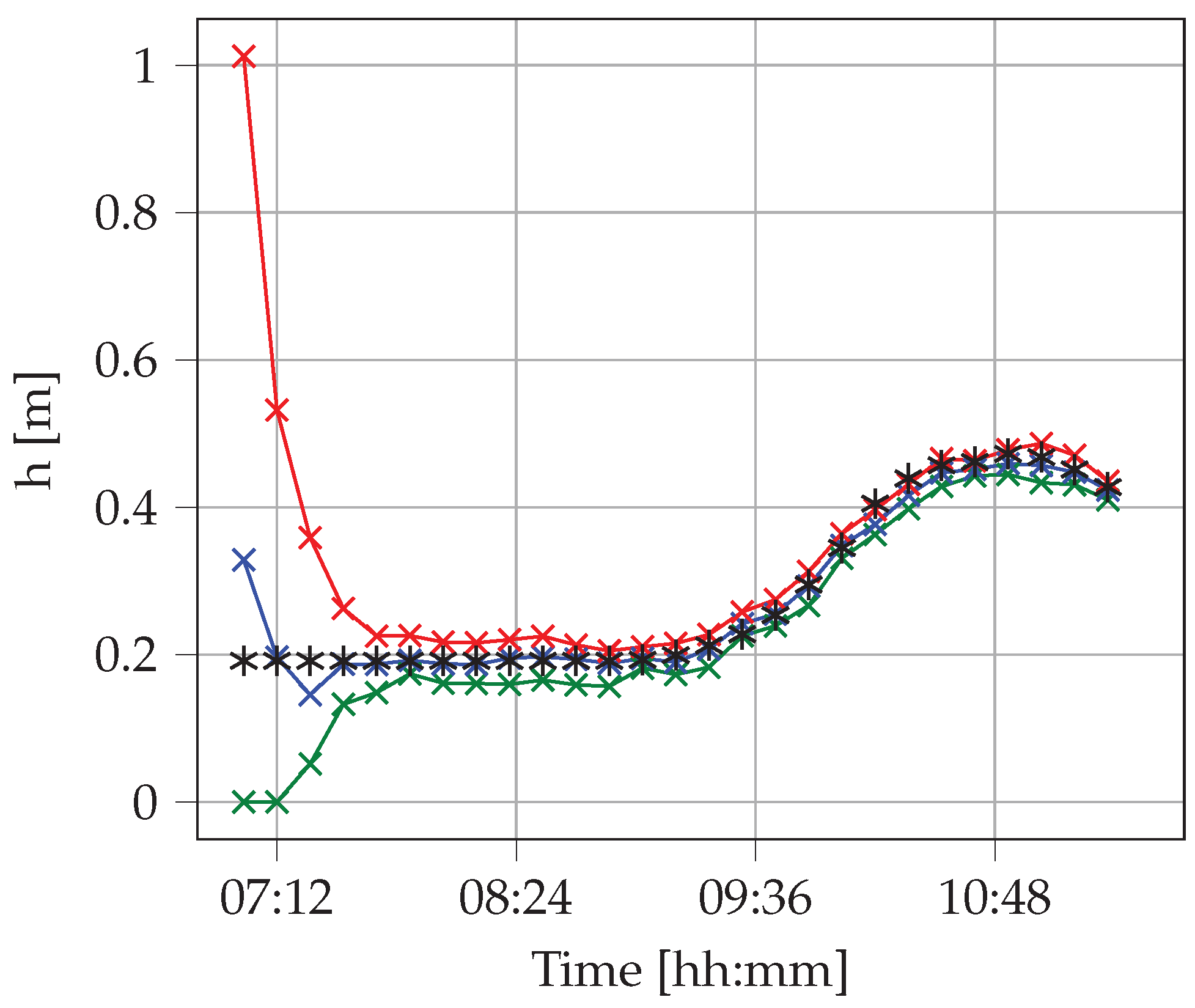
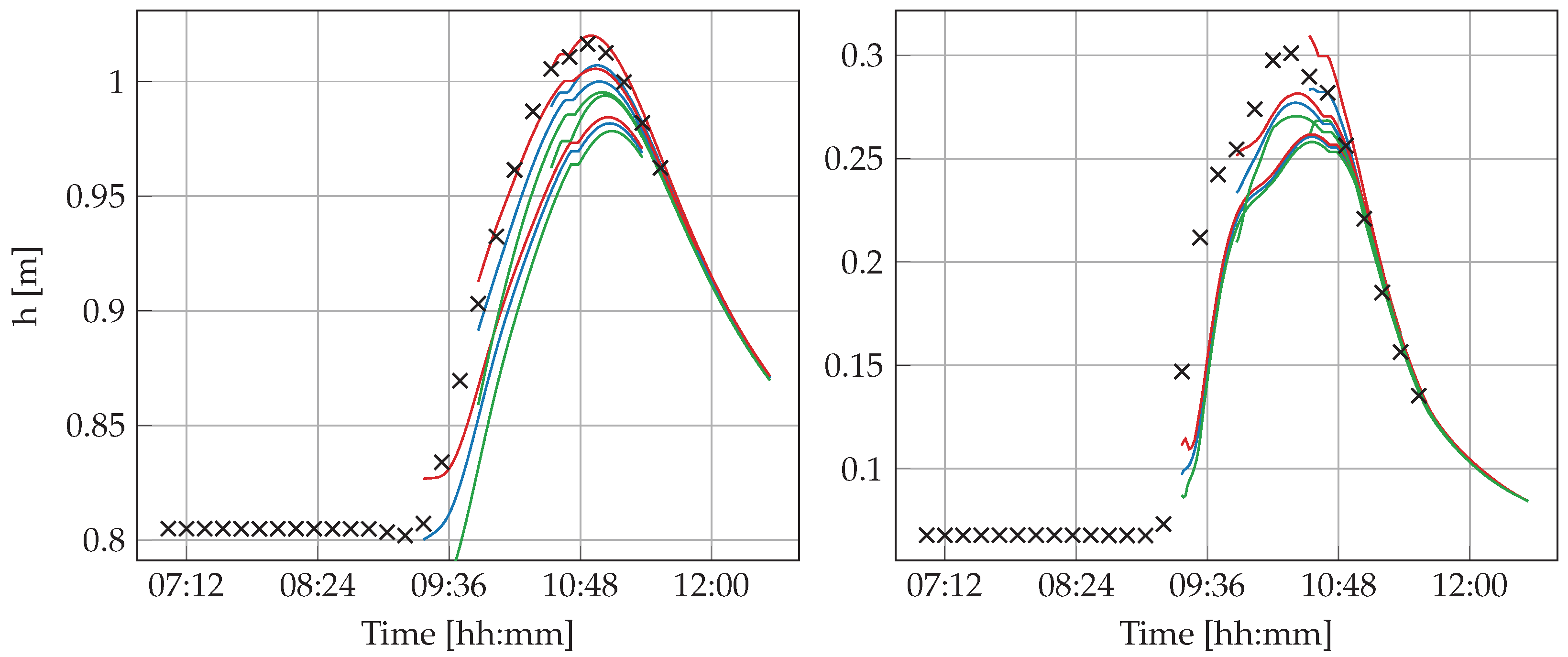
4.3. Results of the Early Warning System

5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SWMM | Storm Water Management Model |
| EnKF | ensemble Kalman filter |
| HiFi model | High-fidelity model |
| DEM | Digital elevation model |
| MAE | Mean absolute error |
| 1D, 2D, 3D | One-, two-, three-dimensional |
| 1D1D | One-dimensional channel system with one-dimensional surface description |
| 1D2D | One dimensional channel system with two-dimensional surface description |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Type | Depth | (In-)Flow | Runoff |
|---|---|---|---|
| Storages | |||
| Nodes | |||
| Links | |||
| Subcatchments |

References
- IPCC. Climate Change 2022: Mitigation of Climate Change. Contribution of Working Group III to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, MA, USA; Cambridge, UK, 2022. [Google Scholar] [CrossRef]
- Skougaard Kaspersen, P.; Høegh Ravn, N.; Arnbjerg-Nielsen, K.; Madsen, H.; Drews, M. Comparison of the impacts of urban development and climate change on exposing European cities to pluvial flooding. Hydrol. Earth Syst. Sci. 2017, 21, 4131–4147. [Google Scholar] [CrossRef] [Green Version]
- Botín-Sanabria, D.M.; Mihaita, A.S.; Peimbert-García, R.E.; Ramírez-Moreno, M.A.; Ramírez-Mendoza, R.A.; Lozoya-Santos, J.d.J. Digital Twin Technology Challenges and Applications: A Comprehensive Review. Remote Sens. 2022, 14, 1335. [Google Scholar] [CrossRef]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of digital twin about concepts, technologies, and industrial applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Fuller, A.; Fan, Z.; Day, C.; Barlow, C. Digital Twin: Enabling Technologies, Challenges and Open Research. IEEE Access 2020, 8, 108952–108971. [Google Scholar] [CrossRef]
- Pedersen, A.N.; Borup, M.; Brink-Kjær, A.; Christiansen, L.E.; Mikkelsen, P.S. Living and Prototyping Digital Twins for Urban Water Systems: Towards Multi-Purpose Value Creation Using Models and Sensors. Water 2021, 13, 592. [Google Scholar] [CrossRef]
- Bartos, M.; Kerkez, B. Pipedream: An interactive digital twin model for natural and urban drainage systems. Environ. Model. Softw. 2021, 144, 105120. [Google Scholar] [CrossRef]
- Thorndahl, S.; Poulsen, T.S.; Bøvith, T.; Borup, M.; Ahm, M.; Nielsen, J.E.; Grum, M.; Rasmussen, M.R.; Gill, R.; Mikkelsen, P.S. Comparison of short-term rainfall forecasts for model-based flow prediction in urban drainage systems. Water Sci. Technol. 2013, 68, 472–478. [Google Scholar] [CrossRef]
- Petrucci, G.; Bonhomme, C. The dilemma of spatial representation for urban hydrology semi-distributed modelling: Trade-offs among complexity, calibration and geographical data. J. Hydrol. 2014, 517, 997–1007. [Google Scholar] [CrossRef]
- Palmitessa, R.; Grum, M.; Engsig-Karup, A.P.; Löwe, R. Accelerating hydrodynamic simulations of urban drainage systems with physics-guided machine learning. Water Res. 2022, 223, 118972. [Google Scholar] [CrossRef]
- Guo, K.; Guan, M.; Yu, D. Urban surface water flood modelling—A comprehensive review of current models and future challenges. Hydrol. Earth Syst. Sci. 2021, 25, 2843–2860. [Google Scholar] [CrossRef]
- Nkwunonwo, U.; Whitworth, M.; Baily, B. A review of the current status of flood modelling for urban flood risk management in the developing countries. Sci. Afr. 2020, 7, e00269. [Google Scholar] [CrossRef]
- Mannina, G. (Ed.) New Trends in Urban Drainage Modelling; Springer Cham: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Bach, P.M.; Rauch, W.; Mikkelsen, P.S.; McCarthy, D.T.; Deletic, A. A critical review of integrated urban water modelling—Urban drainage and beyond. Environ. Model. Softw. 2014, 54, 88–107. [Google Scholar] [CrossRef]
- Maksimović, Č.; Prodanović, D.; Boonya-Aroonnet, S.; Leitao, J.P.; Djordjević, S.; Allitt, R. Overland flow and pathway analysis for modelling of urban pluvial flooding. J. Hydraul. Res. 2009, 47, 512–523. [Google Scholar] [CrossRef]
- Dong, B.; Xia, J.; Zhou, M.; Li, Q.; Ahmadian, R.; Falconer, R.A. Integrated modeling of 2D urban surface and 1D sewer hydrodynamic processes and flood risk assessment of people and vehicles. Sci. Total Environ. 2022, 827, 154098. [Google Scholar] [CrossRef]
- Leandro, J.; Chen, A.S.; Djordjević, S.; Savić, D.A. Comparison of 1D/1D and 1D/2D Coupled (Sewer/Surface) Hydraulic Models for Urban Flood Simulation. J. Hydraul. Eng. 2009, 135, 495–504. [Google Scholar] [CrossRef]
- Jensen, L.; Paludan, B.; Nielsen, N.; Edinger, K. Large scale 1D-1D surface modelling tool for urban water planning. In Proceedings of the Novatech 2010—7ème Conférence internationale sur les techniques et stratégies durables pour la gestion des eaux urbaines par temps de pluie/7th International Conference on Sustainable Techniques and Strategies for Urban Water Management; Brelot, E., Ed.; GRAIE: Lyon, France, 2010; Congrès trisannuel Novatech; pp. 1–10. [Google Scholar]
- Zhao, G.; Mark, O.; Balstrøm, T.; Jensen, M.B. A Sink Screening Approach for 1D Surface Network Simplification in Urban Flood Modelling. Water 2022, 14, 963. [Google Scholar] [CrossRef]
- Pina, R.D.; Ochoa-Rodriguez, S.; Simões, N.E.; Mijic, A.; Marques, A.S.; Maksimović, V. Semi- vs. Fully-Distributed Urban Stormwater Models: Model Set Up and Comparison with Two Real Case Studies. Water 2016, 8, 58. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Balstrøm, T.; Mark, O.; Jensen, M. Multi-Scale Target-Specified Sub-Model Approach for Fast Large-Scale High-Resolution 2D Urban Flood Modelling. Water 2021, 13, 259. [Google Scholar] [CrossRef]
- Leitão, J.P.; Simães, N.E.; Maksimović, V.; Ferreira, F.; Prodanović, D.; Matos, J.S.; Sá Marques, A. Real-time forecasting urban drainage models: Full or simplified networks? Water Sci. Technol. 2010, 62, 2106–2114. [Google Scholar] [CrossRef]
- Djordjević, S.; Prodanović, D.; Maksimović, V. An approach to simulation of dual drainage. Water Sci. Technol. 1999, 39, 95–103. [Google Scholar] [CrossRef]
- Mark, O.; Weesakul, S.; Apirumanekul, C.; Aroonnet, S.B.; Djordjević, S. Potential and limitations of 1D modelling of urban flooding. J. Hydrol. 2004, 299, 284–299. [Google Scholar] [CrossRef]
- Ferrans, P.; Torres, M.N.; Temprano, J.; Rodríguez Sánchez, J.P. Sustainable Urban Drainage System (SUDS) modeling supporting decision-making: A systematic quantitative review. Sci. Total Environ. 2022, 806, 150447. [Google Scholar] [CrossRef] [PubMed]
- Rossman, L. Storm Water Management Model. Available online: https://www.epa.gov/water-research/storm-water-management-model-swmm (accessed on 22 September 2022).
- DHI. MIKE URBAN Product Page. Available online: https://www.mikepoweredbydhi.com/products (accessed on 22 September 2022).
- Lund, N.S.V.; Madsen, H.; Mazzoleni, M.; Solomatine, D.; Borup, M. Assimilating flow and level data into an urban drainage surrogate model for forecasting flows and overflows. J. Environ. Manag. 2019, 248, 109052. [Google Scholar] [CrossRef]
- Thrysøe, C.; Arnbjerg-Nielsen, K.; Borup, M. Identifying fit-for-purpose lumped surrogate models for large urban drainage systems using GLUE. J. Hydrol. 2019, 568, 517–533. [Google Scholar] [CrossRef]
- Baumann, H.; Schaum, A.; Meurer, T. Data-driven control-oriented reduced order modeling for open channel flows. IFAC-PapersOnLine 2022, 55, 193–199. [Google Scholar] [CrossRef]
- García, L.; Barreiro-Gomez, J.; Escobar, E.; Téllez, D.; Quijano, N.; Ocampo-Martinez, C. Modeling and real-time control of urban drainage systems: A review. Adv. Water Resour. 2015, 85, 120–132. [Google Scholar] [CrossRef] [Green Version]
- Lund, N.S.V.; Falk, A.K.V.; Borup, M.; Madsen, H.; Mikkelsen, P.S. Model predictive control of urban drainage systems: A review and perspective towards smart real-time water management. Crit. Rev. Environ. Sci. Technol. 2018, 48, 279–339. [Google Scholar] [CrossRef]
- Litrico, X.; Fromion, V. Modeling and Control of Hydrosystems; Springer: London, UK, 2009. [Google Scholar]
- Lund, N.S.V.; Borup, M.; Madsen, H.; Mark, O.; Mikkelsen, P.S. CSO Reduction by Integrated Model Predictive Control of Stormwater Inflows: A Simulated Proof of Concept Using Linear Surrogate Models. Water Resour. Res. 2020, 56, e2019WR026272. [Google Scholar] [CrossRef]
- Svensen, J.L.; Sun, C.; Cembrano, G.; Puig, V. Chance-constrained stochastic MPC of Astlingen urban drainage benchmark network. Control Eng. Pract. 2021, 115, 104900. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME–J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Sakov, P.; Oke, P.R. A deterministic formulation of the ensemble Kalman filter: An alternative to ensemble square root filters. Tellus A 2008, 60, 361–371. [Google Scholar] [CrossRef] [Green Version]
- Borup, M.; Grum, M.; Madsen, H.; Mikkelsen, P.S. A partial ensemble Kalman filtering approach to enable use of range limited observations. Stoch. Environ. Res. Risk Assess. 2015, 29, 119–129. [Google Scholar] [CrossRef] [Green Version]
- Hansen, L.S.; Borup, M.; Møller, A.; Mikkelsen, P.S. Flow Forecasting using Deterministic Updating of Water Levels in Distributed Hydrodynamic Urban Drainage Models. Water 2014, 6, 2195–2211. [Google Scholar] [CrossRef] [Green Version]
- Das, J.; Manikanta, V.; Teja, K.N.; Umamahesh, N.V. Two decades of ensemble flood forecasting: A state-of-the-art on past developments, present applications and future opportunities. Hydrol. Sci. J. 2022, 67, 477–493. [Google Scholar] [CrossRef]
- Palmitessa, R.; Mikkelsen, P.; Law, A.; Borup, M. Data assimilation in hydrodynamic models for system-wide soft sensing and sensor validation for urban drainage tunnels. J. Hydroinform. 2020, 23. [Google Scholar] [CrossRef]
- de Saint-Venant, A.B. Théorie du mouvement non permanent des eaux, avec application aux crues des rivières et a l’introduction de marées dans leurs lits. C. R. L’Académie Des Sci. 1871, 73, 147–154, 237–240. [Google Scholar]
- Pedersen, A.N.; Brink-Kjær, A.; Mikkelsen, P.S. All models are wrong, but are they useful? Assessing reliability across multiple sites to build trust in urban drainage modelling. EGUsphere 2022, 2022, 1–32. [Google Scholar] [CrossRef]
- Evensen, G. Data Assimilation: The Ensemble Kalman Filter, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Nijmeier, H.; van der Schaft, A. Nonlinear Dynamical Control Systems; Springer: New York, NY, USA, 1990. [Google Scholar]
- Liu, Y.; Slotine, J.; Barabasi, A. Observability of complex systems. Proc. Natl. Acad. Sci. USA 2012, 110, 2460–2465. [Google Scholar] [CrossRef]
- Pichler, M. Swmm_API: API for Reading, Manipulating and Running SWMM-Projects with Python (0.2.0.16); Zenodo: Geneve, Switzerland, 2022. [Google Scholar] [CrossRef]
- McDonnell, B.; Ratliff, K.; Tryby, M.; Wu, J.; Mullapudi, A. PySWMM: The Python Interface to Stormwater Management Model (SWMM). J. Open Source Softw. 2020, 5, 2292. [Google Scholar] [CrossRef]
- Burger, G.; Sitzenfrei, R.; Kleidorfer, M.; Rauch, W. Parallel flow routing in SWMM 5. Environ. Model. Softw. 2014, 53, 27–34. [Google Scholar] [CrossRef]









| Component Type | Depth | (In-)Flow | Runoff |
|---|---|---|---|
| Storages | × | × | |
| Nodes | × | × | |
| Links | × | × | |
| Subcatchments | × |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baumann, H.; Ravn, N.H.; Schaum, A. Efficient Hydrodynamic Modelling of Urban Stormwater Systems for Real-Time Applications. Modelling 2022, 3, 464-480. https://doi.org/10.3390/modelling3040030
Baumann H, Ravn NH, Schaum A. Efficient Hydrodynamic Modelling of Urban Stormwater Systems for Real-Time Applications. Modelling. 2022; 3(4):464-480. https://doi.org/10.3390/modelling3040030
Chicago/Turabian StyleBaumann, Henry, Nanna Høegh Ravn, and Alexander Schaum. 2022. "Efficient Hydrodynamic Modelling of Urban Stormwater Systems for Real-Time Applications" Modelling 3, no. 4: 464-480. https://doi.org/10.3390/modelling3040030