
Key Factors That Influence the Frequency Range of Measured Leak Noise in Buried Plastic Water Pipes: Theory and Experiment
 ,
,
Abstract
:1. Introduction
2. Overview of Leak Detection Using Cross-Correlation
3. Defining the Frequency Bandwidth of Measured Leak Noise
4. Calculating the Frequency Bandwidth of Measured Leak Noise in an In Vacuo Water-Filled Pipe
5. Calculating the Frequency Bandwidth of Measured Leak Noise from a Buried Pipe Surrounded by an External Medium
5.1. Wave Speed and Attenuation Factor
5.1.1. Pipe Surrounded by Water
5.1.2. Pipe Surrounded by Clay Soil
5.1.3. Pipe Surrounded by Sandy Soil
5.2. Factors Affecting the Bandwidth of Measured Leak Noise
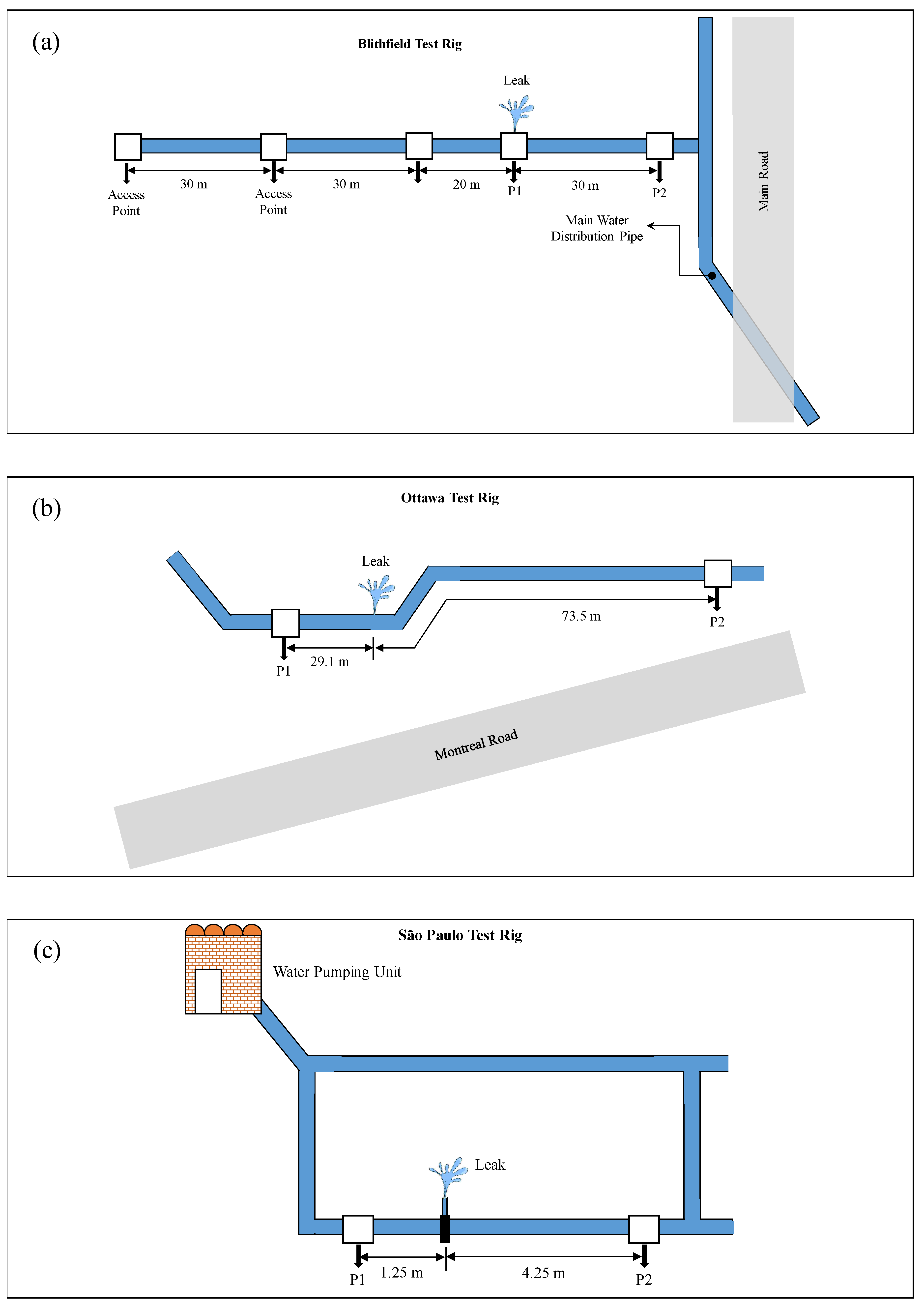
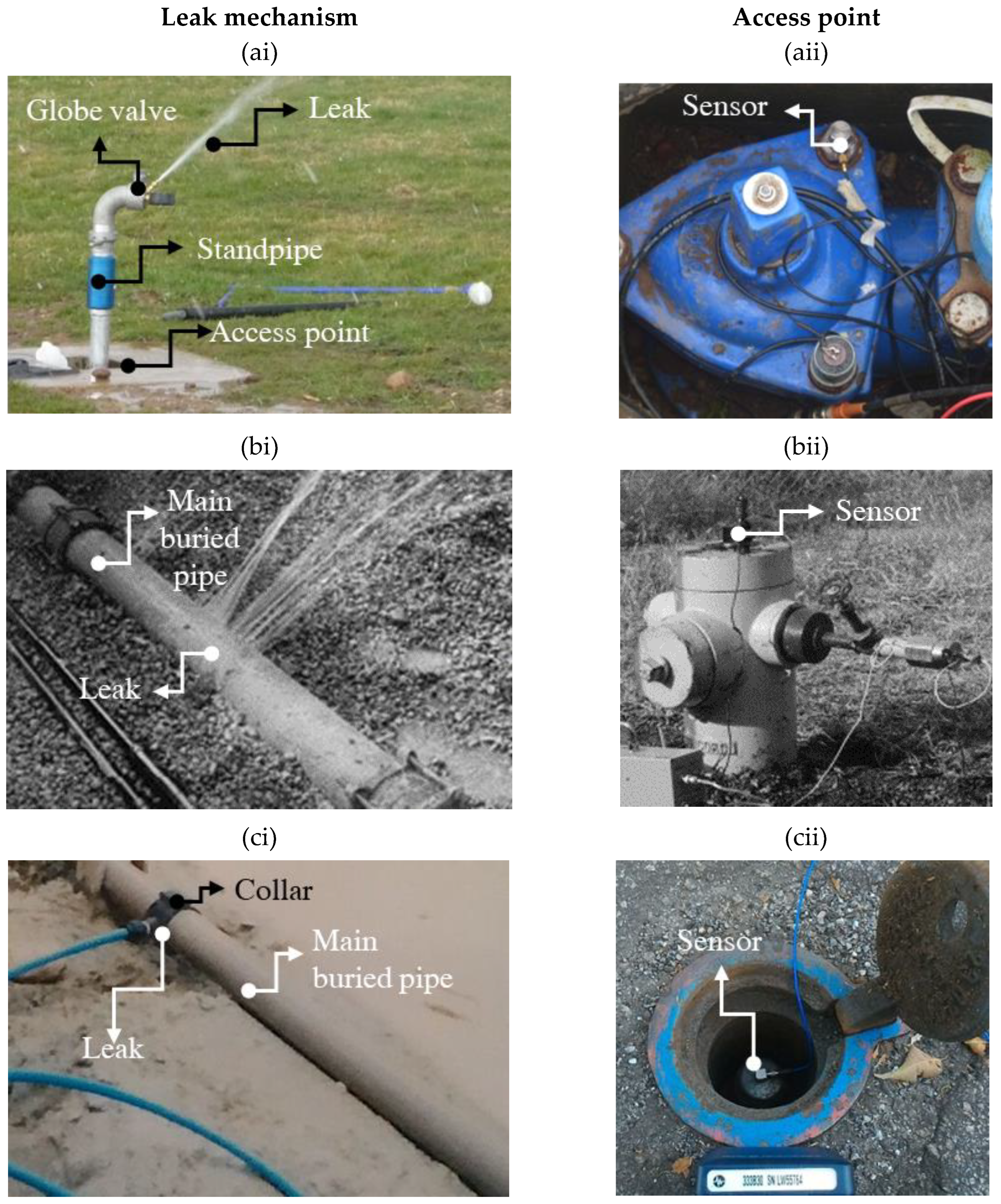
6. Experimental Work
6.1. Descriptions of Test Rigs
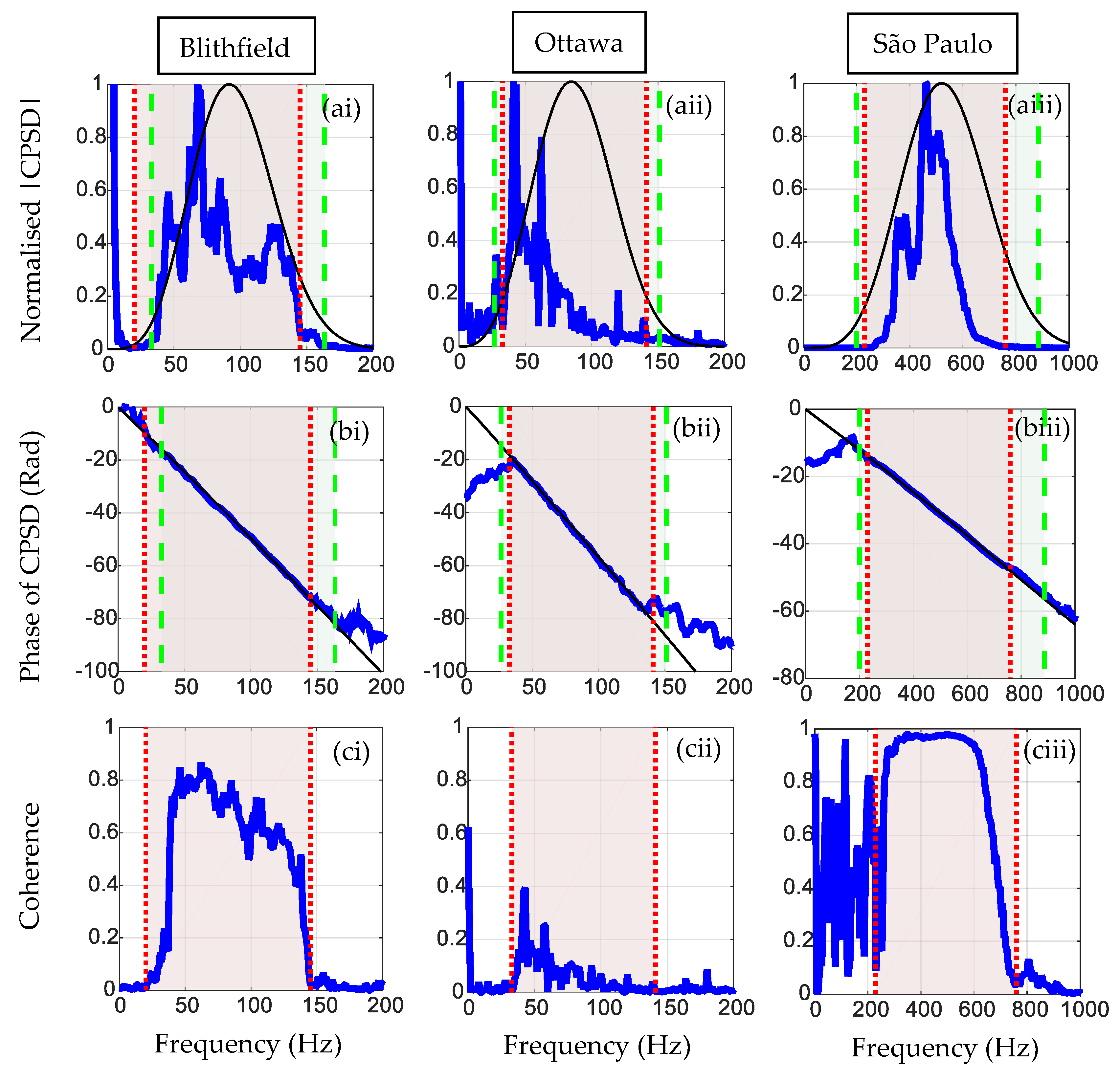
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

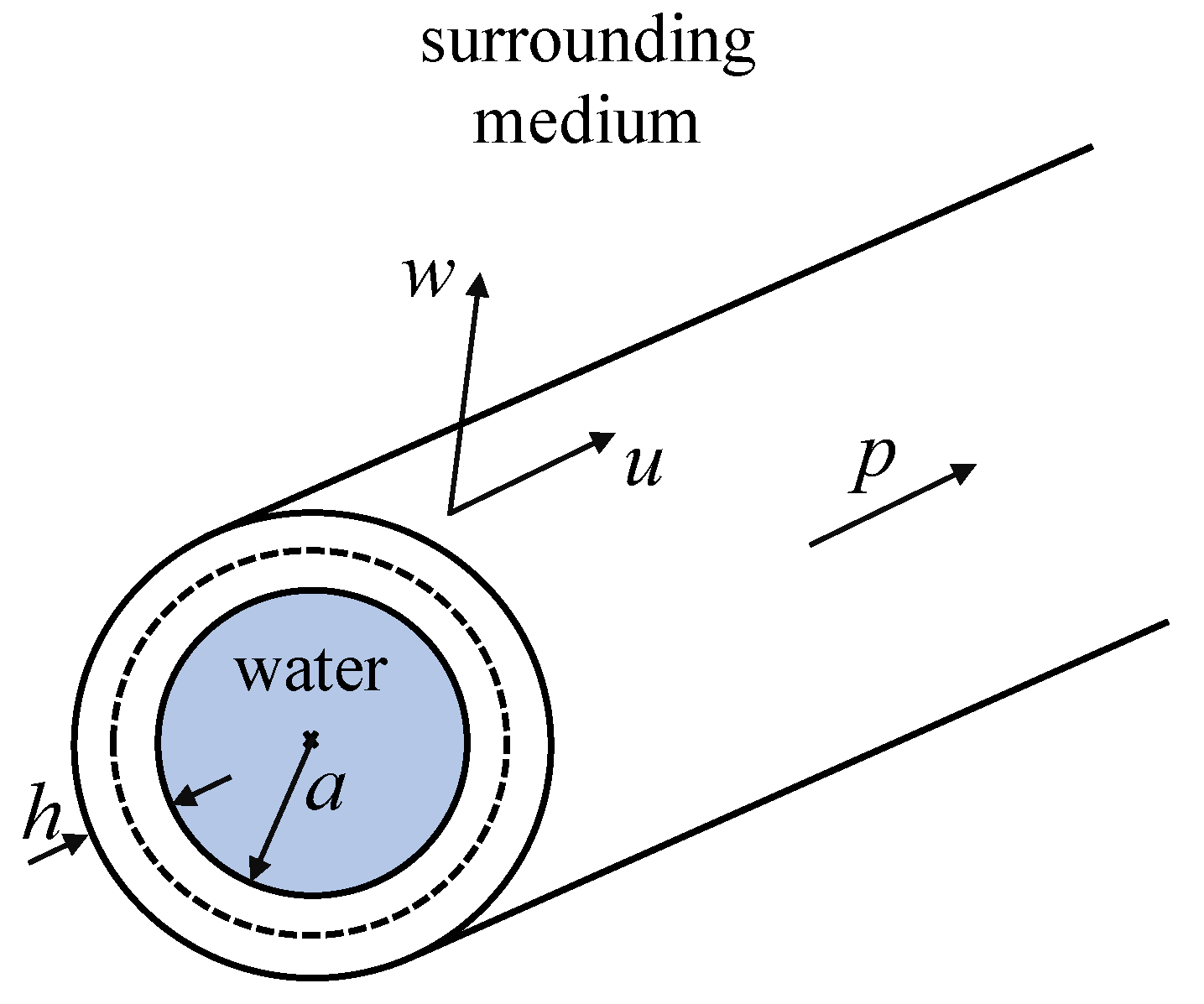
- The pipe and surrounding medium are of infinite extent in the axial direction, and the surrounding medium is of infinite extent in the radial direction;
- The predominantly fluid-borne axis-symmetric wave is the only wave propagating in the pipe and is responsible for the propagation of leak noise;
- The frequency range of interest is well below the pipe-ring frequency so that bending in the pipe wall is neglected;
- The frequency range of interest is such that an acoustic wavelength of water is much greater than the diameter of the pipe.
References
- United States Environmental Protection Agency Report, Water Audits and Water Loss Control for Public Water Systems. 2013. Available online: https://www.epa.gov/sites/default/files/2015-04/documents/epa816f13002.pdf (accessed on 3 March 2023).
- EurEau Report, Europe’s Water in Figures. 2017. Available online: https://www.eureau.org/resources/publications/eureau-publications/5824-europe-s-water-in-figures-2021/file (accessed on 3 March 2023).
- Globo Report. 2019. Available online: https://g1.globo.com/economia/noticia/2019/06/05/oito-estados-do-pais-perdem-metade-ou-mais-da-agua-que-produzem-com-vazamentos-e-gatos-diz-estudo.ghtml (accessed on 3 March 2023).
- BBC Report. 2014. Available online: https://www.bbc.com/news/world-latin-america-29947965 (accessed on 3 March 2023).
- National Geographic Report. 2018. Available online: https://www.nationalgeographic.com/news/2018/02/cape-town-running-out-of-water-drought-taps-shutoff-other-cities/ (accessed on 3 March 2023).
- BBC Report. 2019. Available online: https://www.bbc.com/news/world-asia-india-49232374 (accessed on 3 March 2023).
- UKWIR Reports. 2017. Available online: https://www.ukwir.org/How-will-we-achieve-zero-leakage-in-a-sustainable-way-by-2050 (accessed on 3 March 2023).
- Puust, R.; Kapelan, Z.; Savic, D.A.; Koppel, T. A review of methods for leakage management in pipe networks. Urban Water J. 2010, 7, 25–45. [Google Scholar] [CrossRef]
- Fuchs, H.V.; Riehle, R. Ten years of experience with leak detection by acoustic signal analysis. Appl. Acoust. 1991, 33, 1–19. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. A model of the correlation function of leak noise in buried plastic pipes. J. Sound Vib. 2004, 277, 133–148. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. On the selection of acoustic/vibration sensors for leak detection in plastic water pipes. J. Sound Vib. 2005, 283, 927–941. [Google Scholar] [CrossRef]
- Almeida, F.C.L.; Brennan, M.J.; Joseph, P.F.; Whitfield, S.; Dray, S.; Paschoalini, A.T. On the acoustic filtering of the pipe and sensor in a buried plastic water pipe and its effect on leak detection: An experimental investigation. Sensors 2014, 14, 5595–5610. [Google Scholar] [CrossRef] [PubMed]
- Muggleton, J.M.; Yan, J. Wavenumber prediction and measurement of axisymmetric waves in buried fluid-filled pipes: Inclusion of shear coupling at a lubricated pipe/soil interface. J. Sound Vib. 2013, 332, 1216–1230. [Google Scholar] [CrossRef]
- Gao, Y.; Sui, F.; Muggleton, J.M.; Yang, J. Simplified dispersion relationships for fluid-dominated axisymmetric wave motion in buried fluid-filled pipes. J. Sound Vib. 2016, 375, 386–402. [Google Scholar] [CrossRef]
- Brennan, M.J.; Karimi, M.; Muggleton, J.M.; Almeida, F.C.L.; de Lima, F.K.; Ayala, P.C.; Obata, D.; Paschoalini, A.T.; Kessissoglou, N. On the effects of soil properties on leak noise propagation in plastic water distribution pipes. J. Sound Vib. 2018, 427, 120–133. [Google Scholar] [CrossRef]
- Xu, W.; Fan, S.; Wang, C.; Wu, J.; Yao, Y.; Wu, J. Leakage identification in water pipes using explainable ensemble tree model of vibration signals. Measurement 2022, 194, 110996. [Google Scholar] [CrossRef]
- Fares, A.; Tijani, I.A.; Rui, Z.; Zayed, T. Leak detection in real water distribution networks based on acoustic emission and machine learning. Environ. Technol. 2022, 15, 1–17. [Google Scholar] [CrossRef]
- Cheng, W.; Shen, Y. Frequency Characteristic Analysis of Acoustic Emission Signals of Pipeline Leakage. Water 2022, 14, 3992. [Google Scholar] [CrossRef]
- Sitaropoulos, K.; Salamone, S.; Sela, L. Frequency-based leak signature investigation using acoustic sensors in urban water distribution networks. Adv. Eng. Inform. 2023, 55, 101905. [Google Scholar] [CrossRef]
- Han, X.; Cao, W.; Cui, X.; Gao, Y.; Liu, F. Plastic Pipeline Leak Localization Based on Wavelet Packet Decomposition and Higher Order Cumulants. IEEE Trans. Instrum. Meas. 2022, 71, 3520911. [Google Scholar] [CrossRef]
- Xu, T.; Zeng, Z.; Huang, X.; Li, J.; Feng, H. Pipeline leak detection based on variational mode decomposition and support vector machine using an interior spherical detector. Process Saf. Environ. Prot. 2021, 153, 167–177. [Google Scholar] [CrossRef]
- Diao, X.; Jiang, J.; Shen, G.; Chi, Z.; Wang, Z.; Ni, L.; Mebarki, A.; Bian, H.; Hao, Y. An improved variational mode decomposition method based on particle swarm optimization for leak detection of liquid pipelines. Mech. Syst. Signal Process. 2020, 143, 106787. [Google Scholar] [CrossRef]
- Chew, A.W.Z.; Kalfarisi, R.; Meng, X.; Pok, J.; Wu, Z.Y.; Cai, J. Acoustic feature-based leakage event detection in near real-time for large-scale water distribution networks. J. Hydroinform. 2023, 25, 526–551. [Google Scholar] [CrossRef]
- Scussel, O.; Brennan, M.J.; Almeida, F.C.L.; Iwanaga, M.K.; Muggleton, J.M.; Joseph, P.F.; Gao, Y. An Investigation into the Factors Affecting the Bandwidth of Measured Leak Noise in Buried Plastic Water Pipes. In Recent Trends in Wave Mechanics and Vibrations; Dimitrovová, Z., Biswas, P., Gonçalves, R., Silva, T., Eds.; Springer: Cham, Switzerland, 2023; Volume 125, pp. 1031–1038. [Google Scholar] [CrossRef]
- Pinnington, R.J.; Briscoe, A.R. Externally applied sensor for axisymmetric waves in a fluid filled pipe. J. Sound Vib. 1994, 173, 503–516. [Google Scholar] [CrossRef]
- Muggleton, J.M.; Brennan, M.J.; Linford, P.W. Axisymmetric wave propagation in fluid-filled pipes: Wavenumber measurements in in vacuo and buried pipes. J. Sound Vib. 2004, 270, 171–190. [Google Scholar] [CrossRef]
- Scussel, O.; Brennan, M.J.; Almeida, F.C.L.; Muggleton, J.M.; Rustighi, E.; Joseph, P.F. Estimating the spectrum of leak noise in buried plastic water distribution pipes using acoustic or vibration measurements remote from the leak. Mech. Syst. Signal Process. 2021, 147, 107059. [Google Scholar] [CrossRef]
- Brennan, M.J.; de Lima, F.K.; Almeida, F.C.L.; Joseph, P.F.; Paschoalini, A.T. A virtual pipe rig for testing acoustic leak detection correlators: Proof of concept. Appl. Acoust. 2016, 102, 137–145. [Google Scholar] [CrossRef]
- Gray, J.J.; Tilling, L. Johann Heinrich Lambert, mathematician and scientist, 1728–1777. Hist. Math. 1978, 5, 13–41. [Google Scholar] [CrossRef]
- Dence, T.P. A Brief Look into the Lambert W Function. Appl. Math. 2013, 4, 887–892. [Google Scholar] [CrossRef]
- Hayes, B. Why W? Am. Sci. 2005, 93, 104–108. Available online: https://www.americanscientist.org/sites/americanscientist.org/files/2005216151419_306.pdf (accessed on 1 March 2023). [CrossRef]
- Muggleton, J.M.; Brennan, M.J. Leak noise propagation and attenuation in submerged plastic water pipes. J. Sound Vib. 2004, 278, 527–537. [Google Scholar] [CrossRef]
- Scussel, O.; Brennan, M.J.; Muggleton, J.M.; Almeida, F.C.L.; Paschoalini, A.T. Estimation of the bulk and shear moduli of soil surrounding a plastic water pipe using measurements of the predominantly fluid wave in the pipe. J. Appl. Geophy. 2019, 164, 237–246. [Google Scholar] [CrossRef]
- Hunaidi, O.; Chu, W.T. Acoustical characteristics of leak signals in plastic water distribution pipes. Appl. Acoust. 1999, 58, 235–254. [Google Scholar] [CrossRef]
- Hunaidi, O.; Chu, W.; Wang, A.; Guan, W. Detecting leaks in plastic pipes. J. Am. Water Works Assoc. 2000, 92, 82–94. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Liu, Y.; Almeida, F.C.L.; Joseph, P.F. Improving the shape of the cross-correlation function for leak detection in a plastic water distribution pipe using acoustic signals. Appl. Acoust. 2017, 127, 24–33. [Google Scholar] [CrossRef]
- Almeida, F.C.L.; Brennan, M.J.; Joseph, P.F.; Gao, Y.; Paschoalani, A.T. The effects of resonances on time delay estimation for water leak detection in plastic pipes. J. Sound Vib. 2018, 420, 315–329. [Google Scholar] [CrossRef]
- Fahy, F.; Gardonio, P. Sound and Structural Vibration: Radiation, Transmission and Response, 2nd ed.; Elsevier: Oxford, UK, 2007. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties of the MDPE Pipe | Value |
|---|---|
| Young’s modulus (N/m2) | |
| Density (kg/m3) | 900 |
| Loss factor | 0.06 |
| Poisson’s ratio | 0.4 |
| Pipe mean radius a (mm) | 84.5 |
| Pipe-wall thickness h (mm) | 11 |
| Properties | Water | Stiff Clay Soil | Sandy Soil |
|---|---|---|---|
| (N/m2) | |||
| (N/m2) | 0 | ||
| Bulk and shear loss factor | 0 | 0 | 0 |
| (kg/m3) | 1000 | 2000 | 2000 |
| Poisson’s ratio | 0.5 | 0.47 | 0.33 |
| (m/s) | 1500 | 1414 | 141 |
| (m/s) | 0 | 346 | 86 |
| Properties of the Pipe | Blithfield | Ottawa | São Paulo |
|---|---|---|---|
| Young’s modulus (N/m2) | |||
| Density (kg/m3) | 900 | 900 | 900 |
| Loss factor | 0.06 | 0.04 | 0.06 |
| Poisson’s ratio | 0.4 | 0.4 | 0.4 |
| Pipe radius a (mm) | 80 | 75 | 35.8 |
| Pipe-wall thickness h (mm) | 9.85 | 9.85 | 3.4 |
| Properties | Blithfield | Ottawa | São Paulo |
|---|---|---|---|
| (N/m2) | |||
| (N/m2) | |||
| Bulk and shear loss factor | 0.06 | 0 | 0 |
| (kg/m3) | 2000 | 2000 | 2000 |
| Poisson’s ratio | 0.39 | 0.5 | 0.49 |
| (m/s) | 299 | 447 | 1442 |
| (m/s) | 126 | 7 | 552 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scussel, O.; Brennan, M.J.; de Almeida, F.C.L.; Iwanaga, M.K.; Muggleton, J.M.; Joseph, P.F.; Gao, Y. Key Factors That Influence the Frequency Range of Measured Leak Noise in Buried Plastic Water Pipes: Theory and Experiment. Acoustics 2023, 5, 490-508. https://doi.org/10.3390/acoustics5020029
Scussel O, Brennan MJ, de Almeida FCL, Iwanaga MK, Muggleton JM, Joseph PF, Gao Y. Key Factors That Influence the Frequency Range of Measured Leak Noise in Buried Plastic Water Pipes: Theory and Experiment. Acoustics. 2023; 5(2):490-508. https://doi.org/10.3390/acoustics5020029
Chicago/Turabian StyleScussel, Oscar, Michael J. Brennan, Fabrício Cézar L. de Almeida, Mauricio K. Iwanaga, Jennifer M. Muggleton, Phillip F. Joseph, and Yan Gao. 2023. "Key Factors That Influence the Frequency Range of Measured Leak Noise in Buried Plastic Water Pipes: Theory and Experiment" Acoustics 5, no. 2: 490-508. https://doi.org/10.3390/acoustics5020029