1. Introduction
Sound radiation around vibrating flat components is of practical importance and has been intensively researched for many years. With the development of the industry, the flat structural elements used are becoming larger and more flexible, while their natural frequencies and damping are relatively low. Due to the increasing requirements for reducing the vibrations of such elements (e.g., in aircraft), the application of active control is occupying an increasingly important place [
1]. Smart materials, such as piezoelectric actuators, are often used as sensors and actuators to control their vibrations [
2].
The calculation of sound radiation is based on placing a vibrating flat source in an infinite baffle and calculating the sound field using an integral approach [
3,
4], usually by one of the following methods: integration of the sound intensity on the hemisphere in the far field, or integration of the sound intensity on the surface of the vibrating flat source.
In this paper, the solutions of both approaches are compared for the parametric testing of the acoustic properties of vibrating beams.
To simulate the vibrations of a flat construction element, a beam of constant rectangular cross-section was chosen, with simple supports attached to its ends.
This paper uses the Euler–Bernoulli theory to define the kinematics of the beam and the mode superposition method. In cases where the structure vibrates simultaneously with multiple vibration modes, each individual vibration mode contributes to the total sound radiation of the structure. If the material damping is neglected, the vibration modes are real, but in case of higher damping or if the complexity of the modes is too large, the acoustic radiation must be investigated on the basis of complex modes [
5]. Moreover, the sound radiation of each vibration mode is not independent, and the coupling between them affects the total sound power. It is shown in the literature [
6] that the effects of modal coupling are negligible for a structure with resonant excitation and/or high excitation frequency. However, for lowfrequency excitation and non-resonant excitation, the contributions of modal coupling can be significant. Modal radiation efficiencies were also studied by the authors of [
7]. The results show that without considering the effects of the cross-modal coupling, the radiated sound power can be well over- or -underestimated even at resonance frequencies. Thus, it is difficult to determine when the modal interaction can be neglected, but in the literature, the modal interaction is often omitted in order to simplify the calculation of the sound power [
8].
The Rayleigh integral was used to calculate the sound radiation. It should be noted that the Rayleigh integral is valid only for plate-like structures. However, it is possible to replace the acoustic model with a more advanced model for more complex structures, such as a boundary element model [
9,
10,
11].
The vibration response of the beam was calculated for the excitation and actuator action perpendicular to the beam (along the vertical axis) and at specific positions on the beam. In this paper, an analysis of the influence of the actuator parameters on the total sound power level was performed and the optimal solution for the position and amplitude of the actuator force with the minimal total sound power was determined. The same optimization objective was chosen in [
12]. In [
13], a method is described to find the optimal force driver array (actuators) that allows for the control of all bending modes of the plate within a certain frequency band. In [
14], a method for generating a directional sound field by controlling the structural vibration of a plate through multiple actuators is proposed. In [
15], a method for optimizing the arrangement of actuators for more effective active noise barriers is described.
Since most of the vibrational energy is accounted for by the forced frequencies near the natural frequencies, the optimal solution was determined using analytical expressions for the sound power of individual vibrational modes and finally confirmed via calculation from the response for the entire frequency range. An efficient method for determining the minimum sound power using the additional actuators was found. The contribution lies in the simplicity of the new method for the determination of the optimal position and amplitude of the actuators, which enables faster determination of the optimal actuator parameters. The final optimal position is confirmed with the simulation of the entire given frequency spectrum.
2. Mathematical Model
The derivation of sound radiation around a vibrating beam involves the evaluation of vibrations and the calculation of sound radiation.
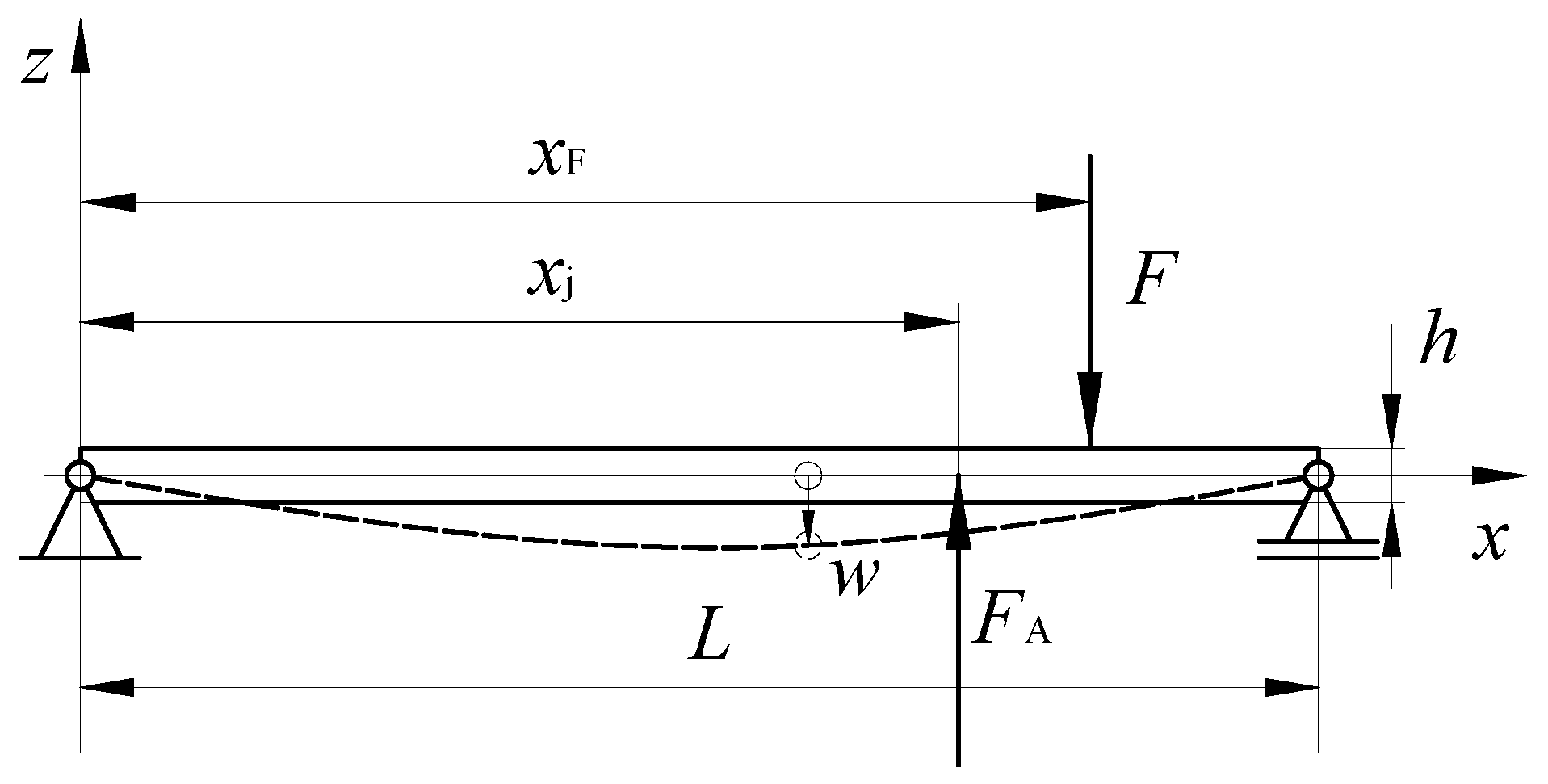
The mathematical model of vibrations of an elastic beam (
Figure 1) is represented by differential equations based on the Euler–Bernoulli theory as follows [
16,
17,
18]:
where
E is Young’s modulus of elasticity,
I is the axial moment of inertia of the cross-section
S about the
y-axis,
u(
x,
t) is the transverse displacement of the beam,
x is the longitudinal axis of the beam,
t is the time,
ρs is the density of the beam material, and
F(
x,
t) is the load per unit length of the beam. The beam damping is neglected for simplicity.
For forced harmonic oscillations, the displacement of the beam is defined by the expression using the method of separation of variables (Fourier method) as follows:
where
u(
x) are the amplitudes of the transverse displacements along the length of the beam and
ω is the circular frequency of the harmonic excitation
u(
x).
The displacement amplitudes,
u(
x), are obtained using the mode superposition method. This solution is valid for lightly damped (damping ratio ζ < 0.01) [
3], harmonically excited flat constructions and it can be used to estimate the response at any excitation frequency. A harmonic excitation
F(
x,
t) of the following form is assumed as:
The displacement amplitudes along the length of the beam can be determined using the following equation:
where
The load per unit length of the beam
F is defined in [
16], as follows:
where
FF,
φF, and
xF, and
Fj,
φj, and
xj are the amplitude, phase, and position of the force and actuator, respectively,
M is the total number of actuators, and
δ(
x) is the Dirac function.
The differential Equation (4) is solved for simple supports at the ends of the beam as follows:
where
My is the moment of force about the
y-axis, and the natural frequencies and natural modes are defined using the following expressions:
where
A is the amplitude and
n is the ordinal number of the mode shape.
The general solution of Equation (4) and the chosen boundary conditions of Equation (7) can be obtained using the mode superposition method as follows [
16]
where
M is the total number of used actuators.
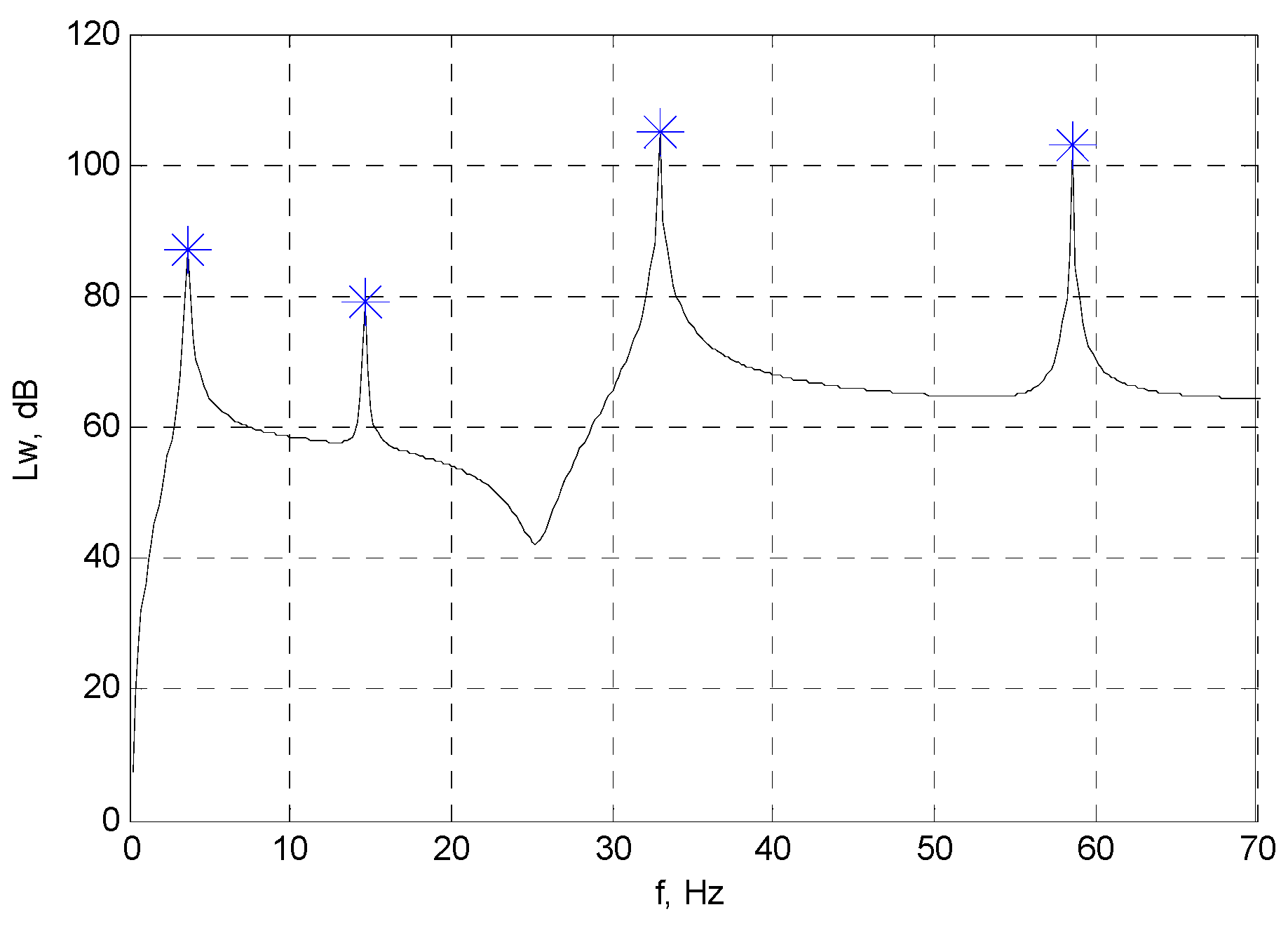
In practice, the first four mode shapes have the greatest influence on the total level of sound power [
19], which is also applied in this paper.
The harmonic waves in the ambient air are defined using the following Helmholtz equation:
where
p is the acoustic pressure and
k is the wave number in the air.
For the interaction between the vibrating surface of the beam and the air surrounding the beam, the following condition,
must be fulfilled on the surface of the beam, and the condition,
must be fulfilled on the surrounding baffle.
The solution of the Helmholtz equation is the expression for the acoustic pressure, Rayleigh integral [
3], as follows:
where
b is the width of the beam,
ρ is the air density, and
r is the distance between the differential surface
dA(
x0,
y0), and the position (
x,
y,
z = 0) of the sound pressure estimate is as follows:
The velocity of the vibrating beam at position
x is determined using the following equation:
while the sound power of the vibrating beam is determined using the following:
where
v* is the conjugate complex velocity.
Since the results of the integrals just described can be obtained only by numerical integration, the calculation was carried out for confirmation with another basic principle, namely, with the sound pressures in the far field [
20], as follows:
where the quantities
α and
β are defined by the following expressions:
and the quantities
φ and
θ are the coordinates of the spherical coordinate system (
φ, π/2 −
θ,
r) of which the origin lies in the corner of the beam.
The following is an expression for the sound power based on acoustic pressures on a hemisphere in the far field:
From the sound power in paper [
20], the sound radiation efficiency of an
Sn beam vibrating in one of its mode shapes was calculated as follows:
The cosine function is used when
n is an odd integer, while the sine function is used when
n is an even integer. From the sound radiation efficiency, the sound power level is calculated according to the following expression:
where
is the average mean square surface velocity of the beam surface.
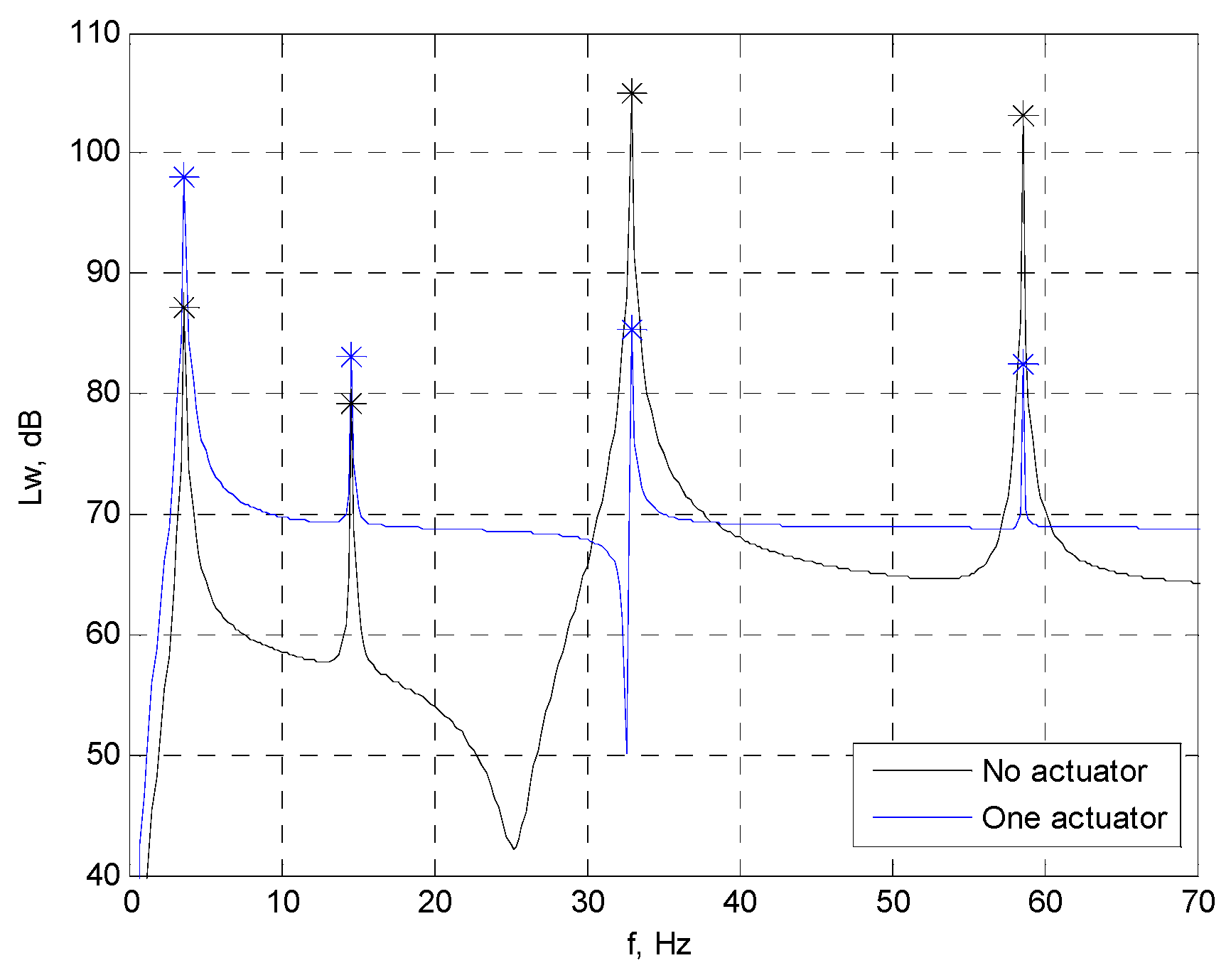
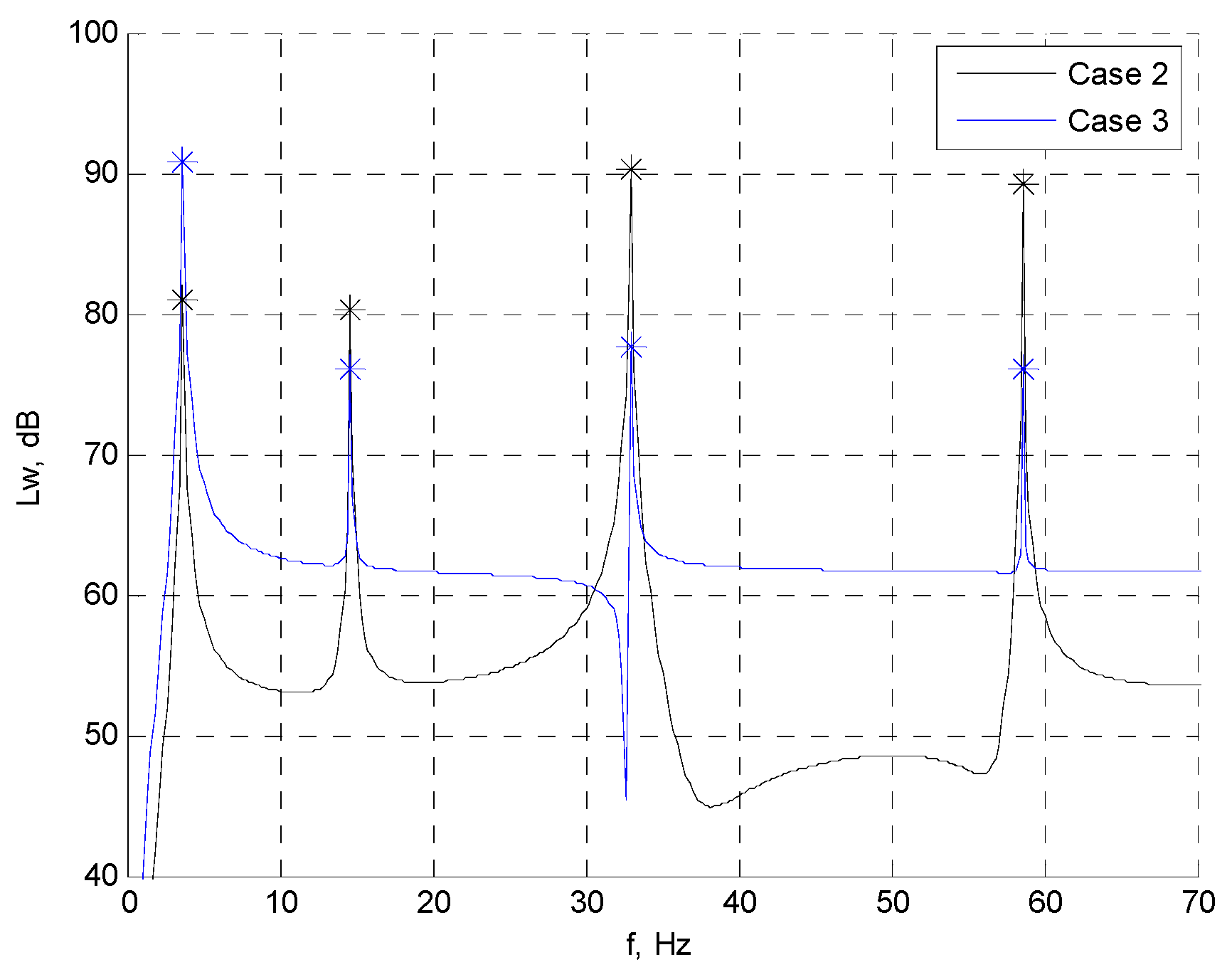
The sound power values calculated according to this procedure are marked with an asterisk in Example 1, and a complete agreement with the numerical result can be seen.
The average mean square surface velocity is calculated using the following expression:
and for the mode shape of a beam that is simply supported at both ends, the average mean-square surface velocity can be determined using the following expression:
where
vm is the amplitude of the vibration velocity of the given mode shape.
The total response of the beam to the force is determined by the mode superposition method, i.e., for each forced frequency, the response is the sum of its own mode shapes multiplied by the corresponding time functions. If the forced frequency is close to the natural frequency, the beam is assumed to vibrate approximately in the corresponding mode shape. Possible deviations from this were checked by comparing the amplitudes of the excited mode shapes (Example 1).
The sound power level of the beam for the forced circular frequency
ω is calculated according to the following expression:
where the reference sound power is
W0 = 10
−12 W.
The total sound power level of the whole spectrum
LWtot is calculated by the following expression:
where
LWi is the sound power level calculated for a forced circular frequency
ω and
N is the total number of calculation frequencies or the ratio between the width of the frequency band and the frequency step. The interaction between the vibrational modes is neglected for simplicity. The influence of the parameters (amplitude of the force and position of the force on the total sound power level is considered for a given frequency band. The aim is to determine the minimum total sound power level.
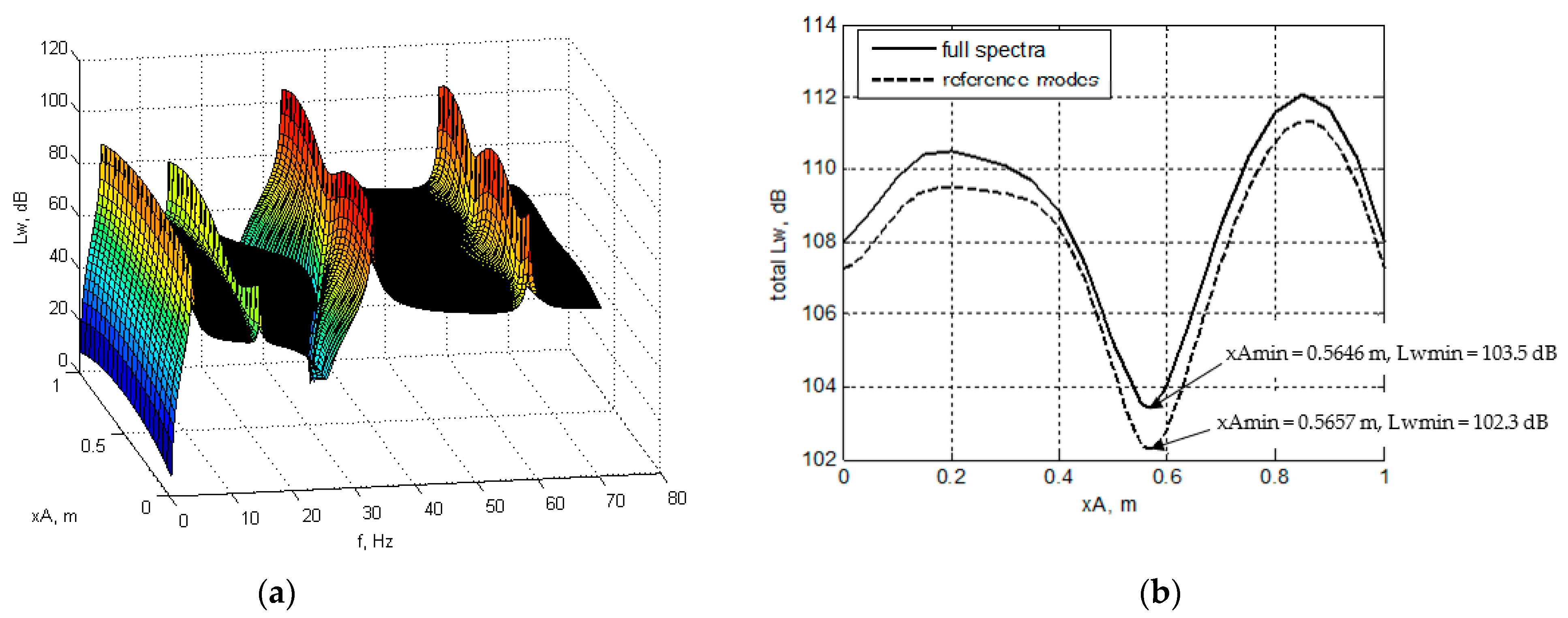
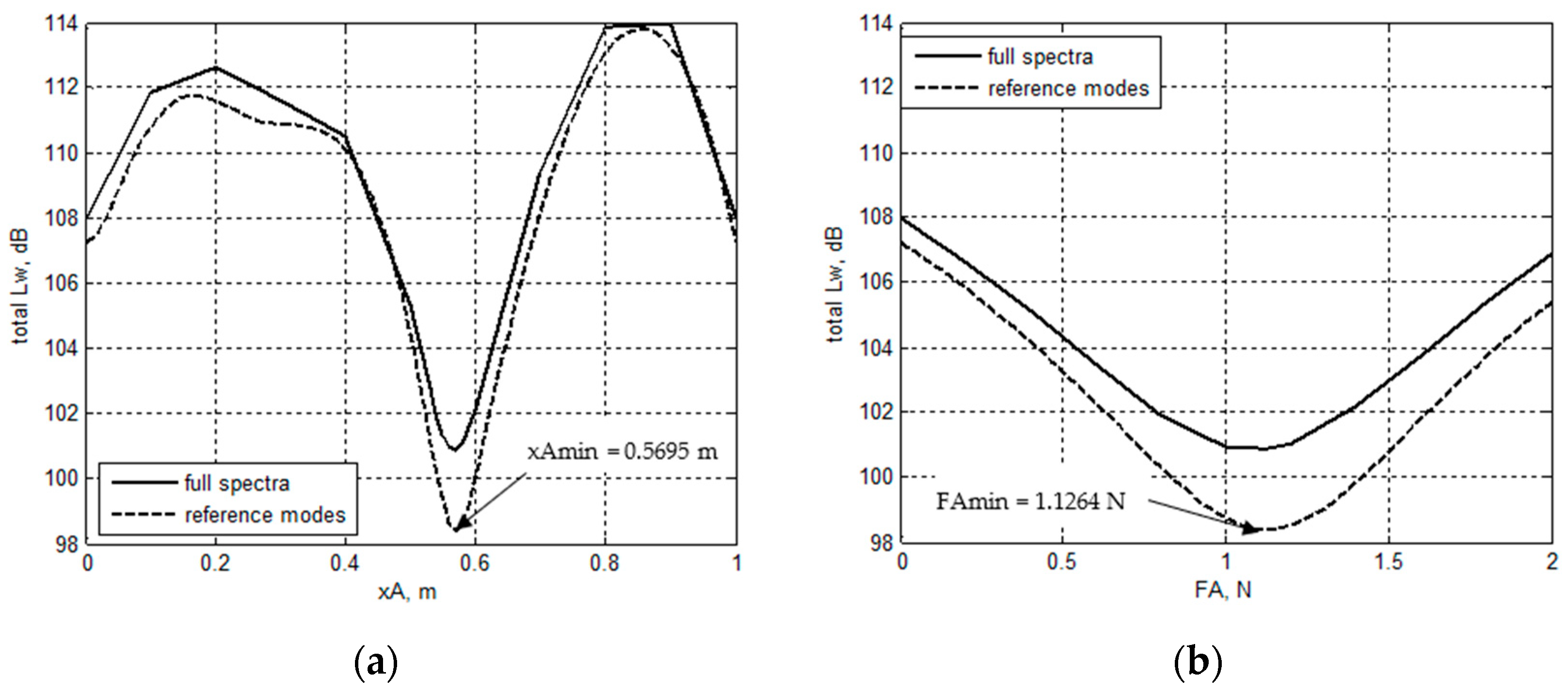
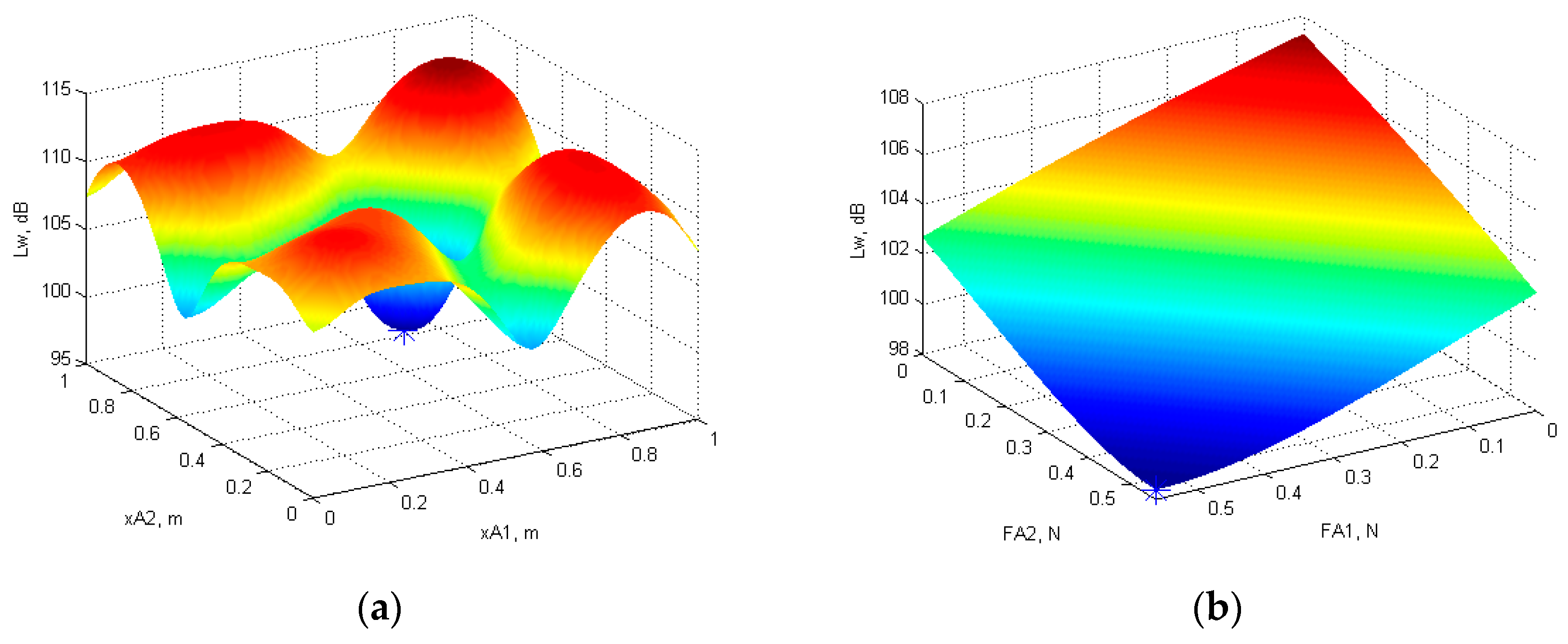
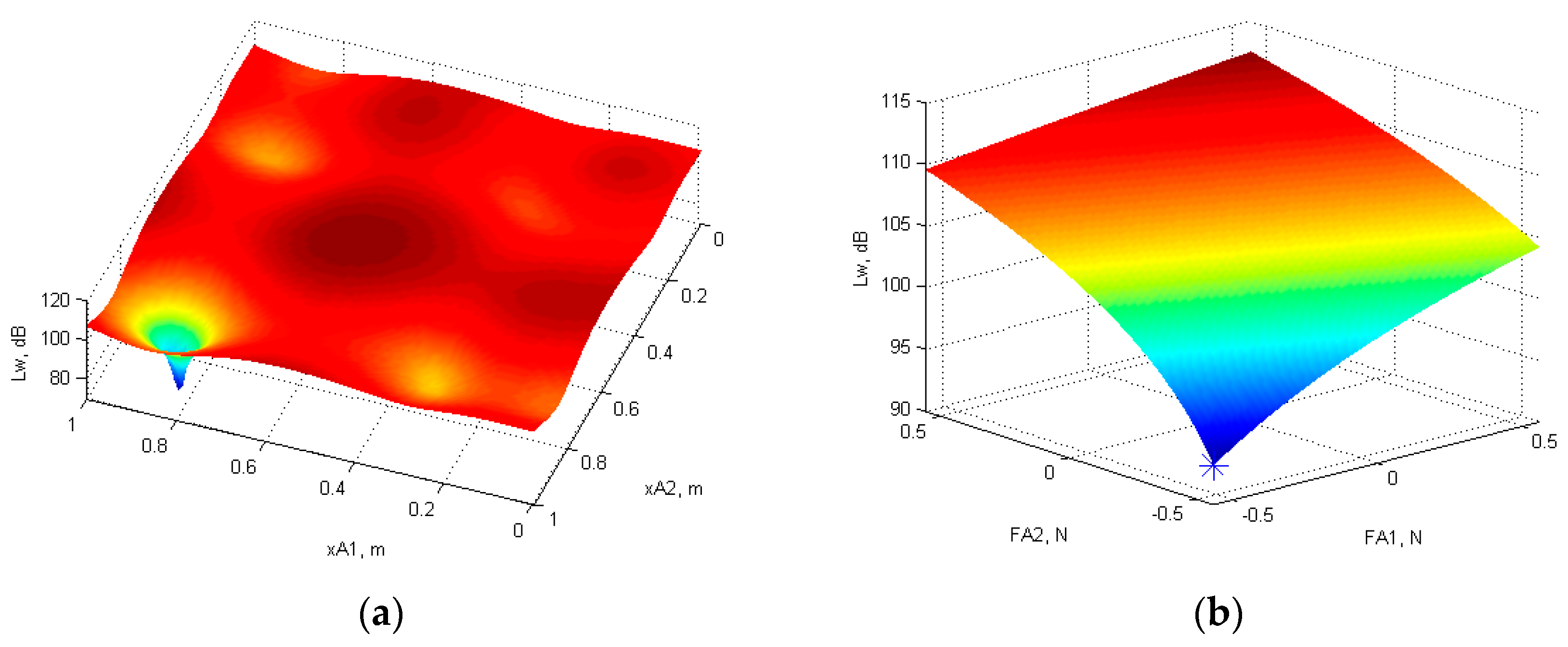
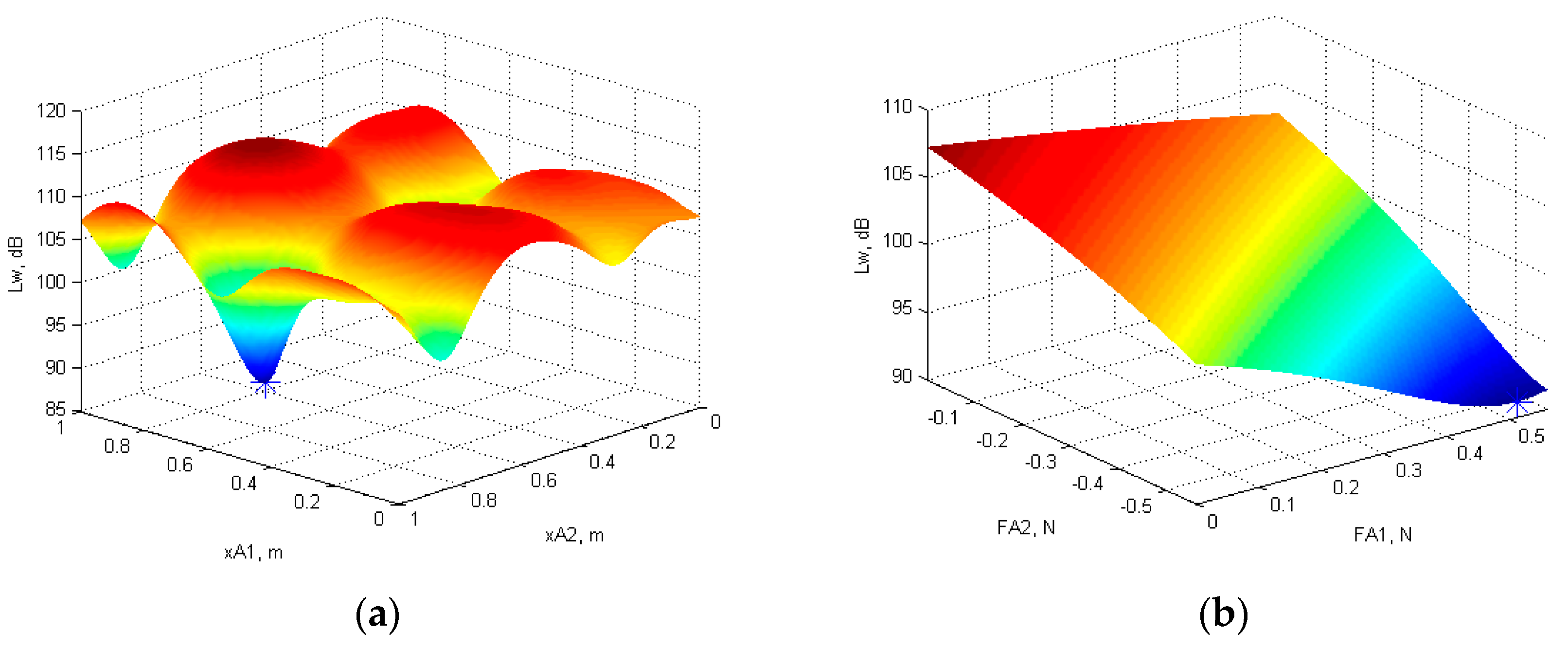
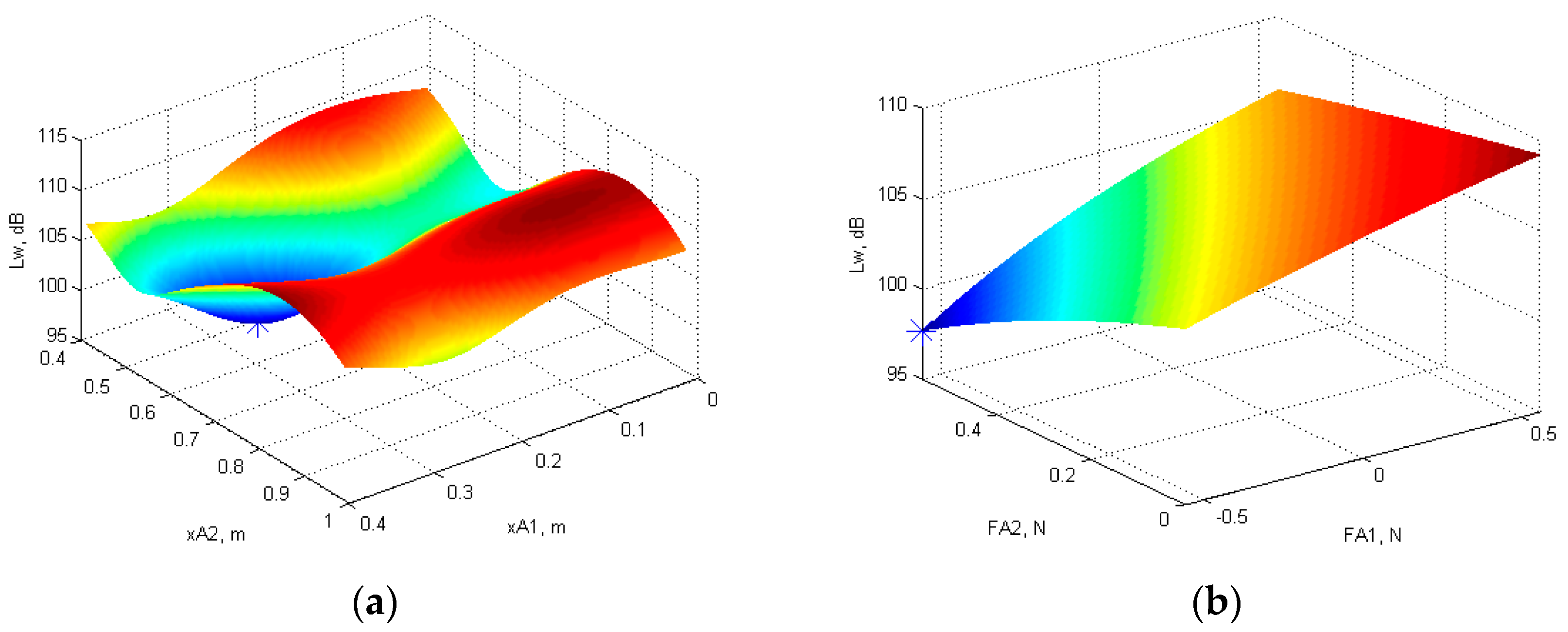
This paper presents a method for efficiently determining the parameters of the minimum total sound power level (Examples 3.2–3.4) based on the fact that the individual mode shapes have the most impact on the total sound power level. It was also proven that the minimum of the total power of the whole spectrum is close to the total power of the reference mode shapes. The optimization problem is solved using the sequential quadratic programming (SQP) method [
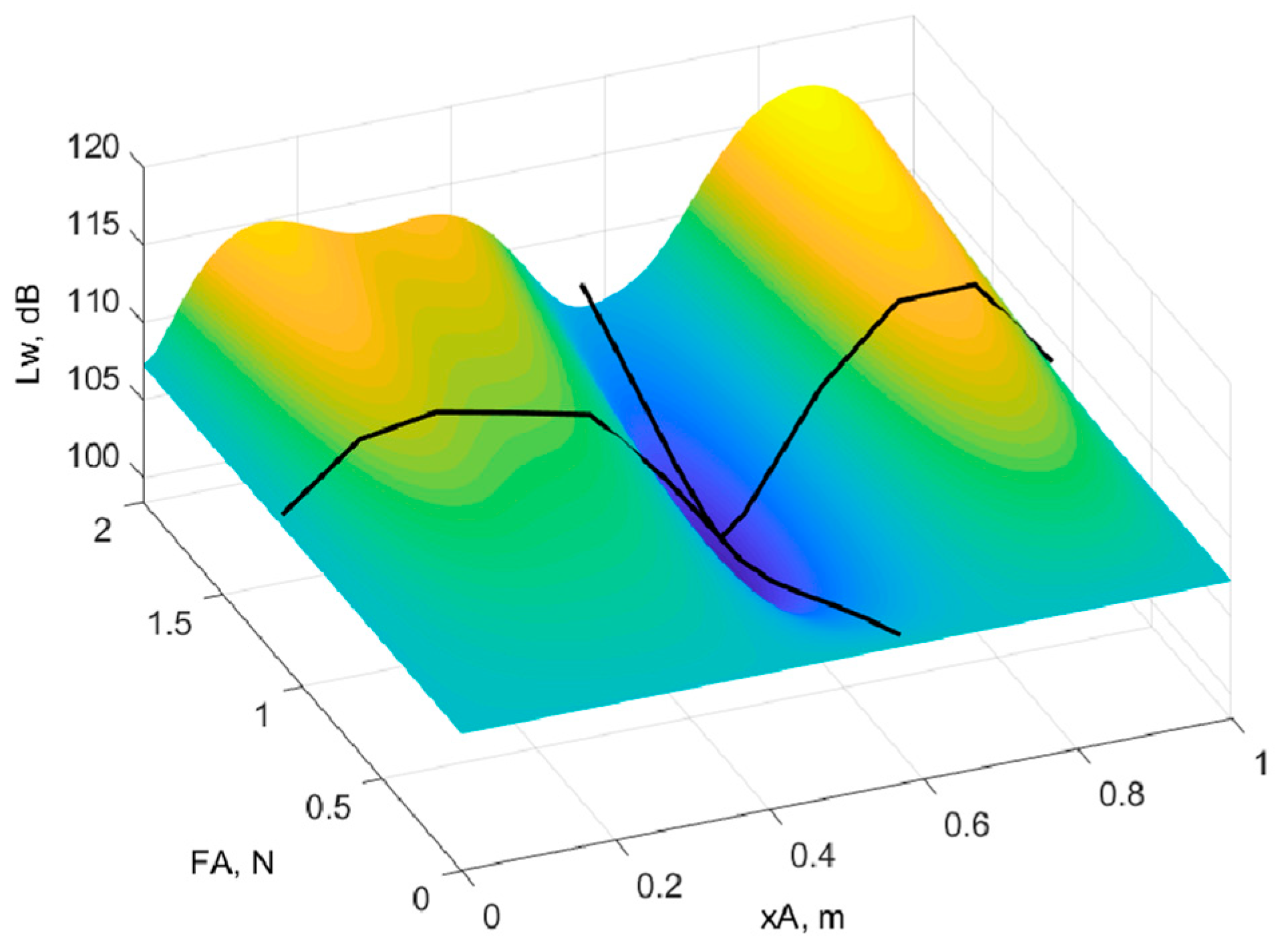
21]. The objective function, i.e., the total sound power level calculated using Equation (27) obtained with four reference mode shapes, is optimized in the presence of constraints on optimization variables. The optimization variable in Example 3.2 is the position of one actuator. The optimization variables in Example 3.3 are the position and amplitude related to one actuator, and in Example 3.3 are the position and amplitude related to two actuators. Details of the constraints on optimization variables are given as a part of the presented examples in the text that follows.
4. Conclusions
The sound power level of a stationary vibrating structural surface can be noticeably reduced by selecting the optimal position, force amplitude, and phase of the added actuators. This paper proposes a method for faster determination of the optimal parameters to achieve the minimum total sound power level.
To simulate the vibrations of a flat construction element, a beam of constant rectangular cross-section was chosen, simply supported at its ends. In this paper, the Euler–Bernoulli theory and the mode superposition method are used to define the motion of the beam. The beam is placed in an infinite baffle, and the calculation of the sound power using the sound pressures in the near and far fields is described.
The method is based on the similarity of the total sound power level of the reference mode shapes and the total sound power level of the whole spectrum. This paper showed that the optimized actuator positions for both approaches match closely. In addition, due to the significantly reduced computational time, the proposed method for determining optimal parameters allows the simultaneous search for the optimum for several parameters, which, to the authors’ knowledge, has not been executed before in published works.
In this work, the position and force amplitude of one and two actuators operating in phase or in antiphase with a given harmonic load on a simply supported beam were optimized in the frequency range of the first four natural frequencies. The following conclusions were drawn from the optimization results:
- -
When one or two actuators are applied in phase with a harmonic load, the optimization results are equal, i.e., two actuators act at the same position as one actuator and the sum of the force amplitudes of two actuators is equal to the force amplitude of one actuator.
- -
If one actuator acts in antiphase with the harmonic load, its optimal position is always at the position of the harmonic load.
- -
If two given actuators and the load cannot act in antiphase, the optimal positions of the actuators enable the actuator force to be in antiphase with the velocity of the excited mode shape.
- -
The most influential input parameter for the optimization of the actuator position is the position of the harmonic load.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}