

A Comprehensive Model to Estimate Electric Vehicle Battery’s State of Charge for a Pre-Scheduled Trip Based on Energy Consumption Estimation

 ,
,
Abstract
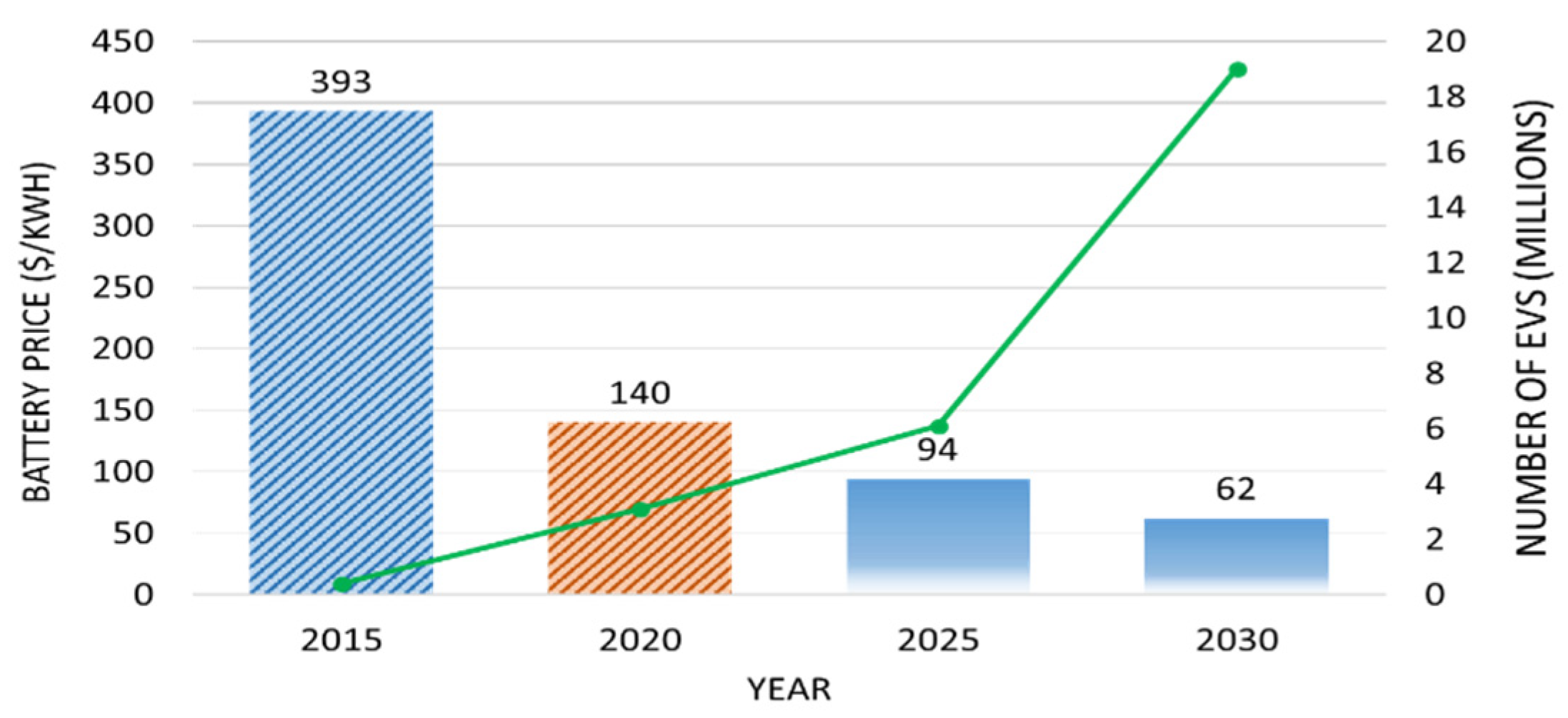
:1. Introduction
- (1)
- Propose a comprehensive model to calculate the amount of energy required to charge electric vehicles prior the departure time.
- (2)
- Applied the proposed method to evaluate the energy consumption of electric vehicles in different road characteristics and weather conditions.
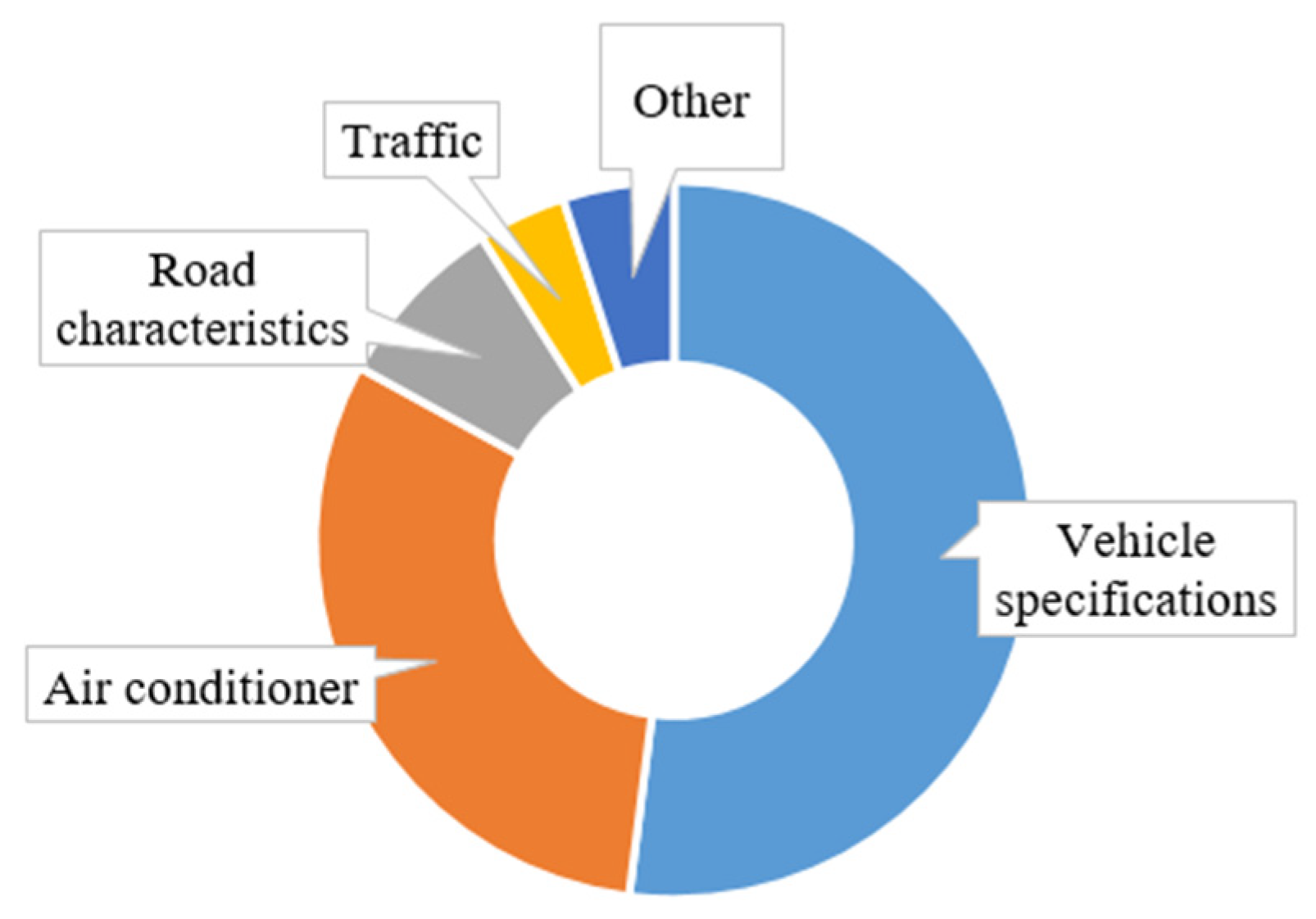
2. Main Factors Impacting EV’s Energy Consumption
3. A Comprehensive Model for Estimating EV Battery’s SOC for Pre-Defined Trip
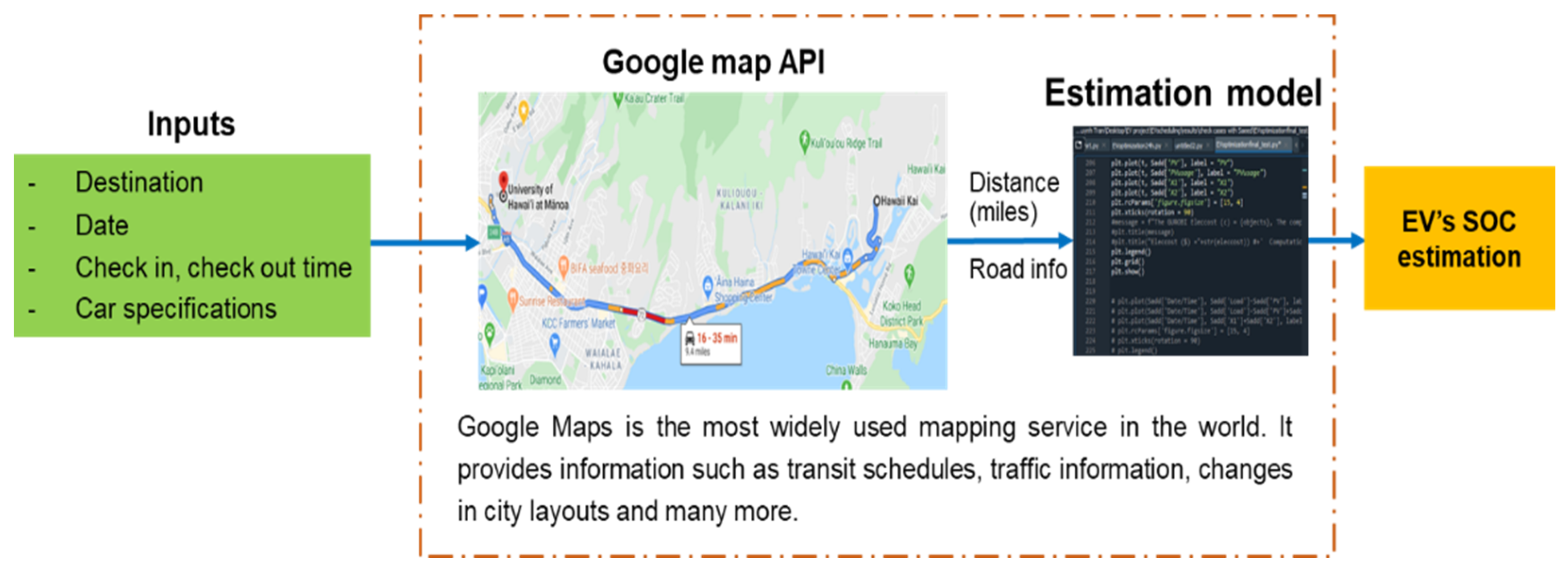
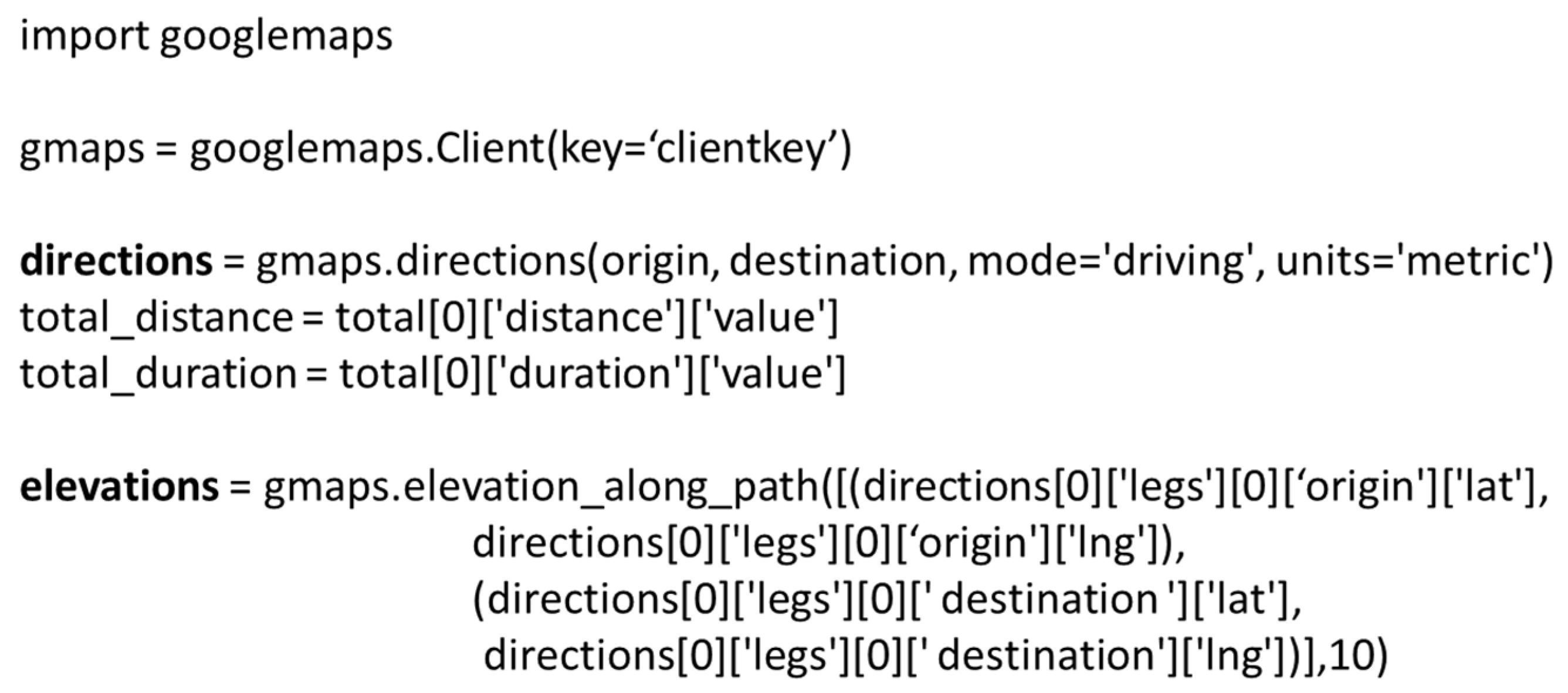
- Step 1: Collect trip information using Google map API.
- Step 2: Estimate the electric vehicle’s energy consumption based on the pre-identified trip information.
- Step 3: Estimate the essential EV battery’s Stage of Charge (SOC) which is required to make the trip.
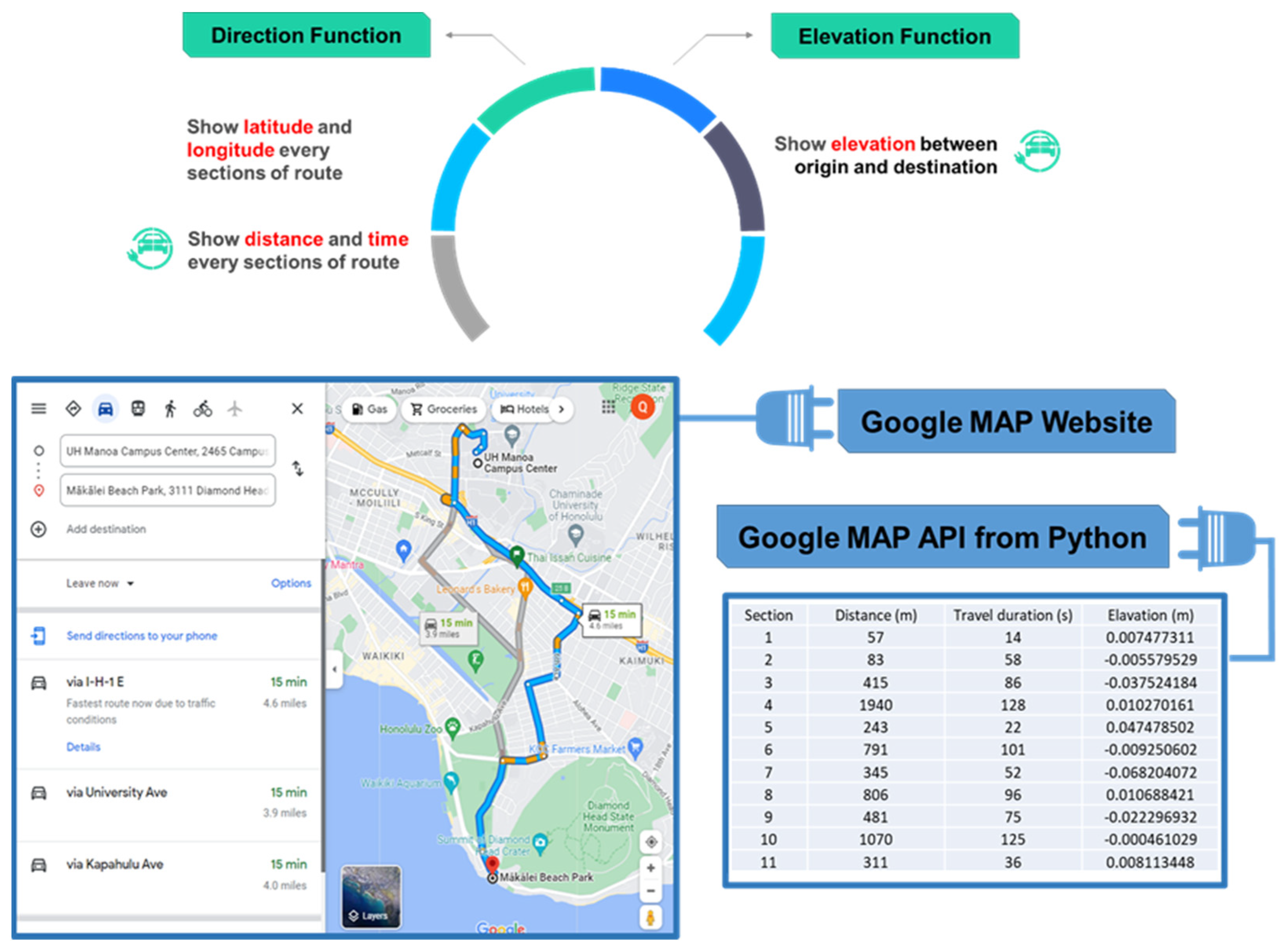
3.1. Step 1—Collect Trip Information Using Google Map
3.2. Step 2—Estimate the Electric Vehicle’s Energy Consumption
3.3. Step 3—Estimate the Electric Vehicle’s Battery S
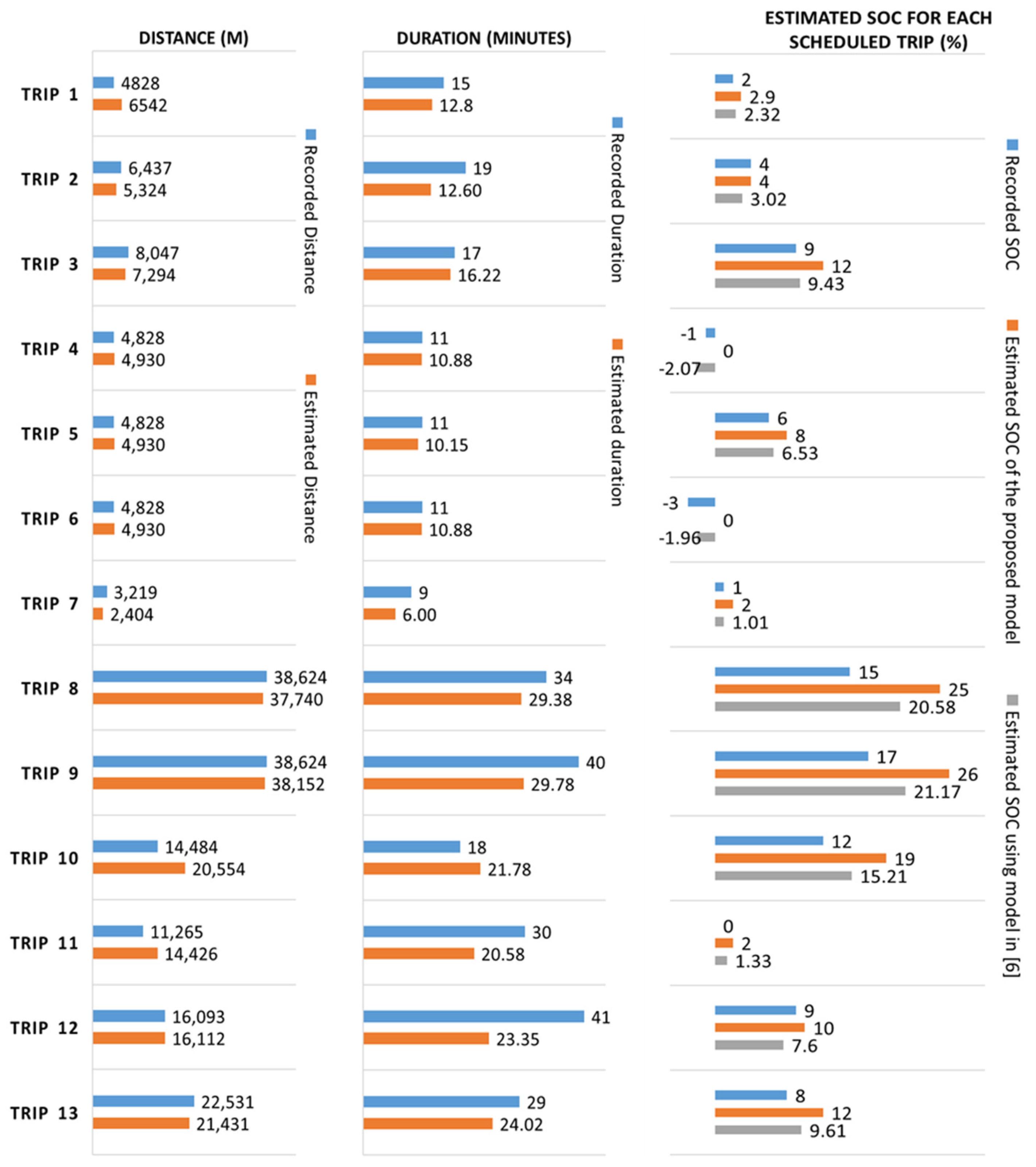
4. Applications
- The estimation model in paper [6].
- The proposed model in this paper.
- R1: Ambiance temperature (F)
- R2: A/C temperature (F)
- R3: Distance (m)
- R4: Duration (min)
- R5: Average Speed (m/s)
- R6: Number of Passengers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SOC | State of charge |
| GHG | GreenHouse Gas |
| EV | Electric vehicle |
| V2G | vehicle-to-grid |
| API | Application Programming Interface |
| AC | Air conditioner |
| MAPE | Mean absolute percentage Error |
| EEVconsumption | The energy consumption |
| Edriving | energy consumption from driving the car |
| EA/C | the energy consumption from air conditioner |
| Elosses | other energy losses |
| Edriving | The driving energy consumption |
| Froll | rolling resistance force |
| Fdrag | aerodynamic drag force |
| Fhill | hill climbing force |
| Facceleration | acceleration force |
| velocity | |
| he travel duration | |
| vehicle mass | |
| gravitational force | |
| rolling resistance coefficient | |
| hill angle | |
| density of the air | |
| drag coefficient | |
| frontal area of electric vehicle | |
| inertia of the wheel | |
| tyre radius | |
| inertia of motor | |
| gear ratio | |
| acceleration |
References
- Richter, J.L. A circular economy approach is needed for electric vehicles. Nat. Electron. 2022, 5, 5–7. [Google Scholar] [CrossRef]
- Rauwald, B.E.C. Costly Electric Vehicles Confront a Harsh Coronavirus Reality. 2020. Available online: https://www.bloomberg.com/news/articles/2020-05-26/can-vw-s-and-tesla-s-electric-vehicle-goals-survive-coronavirus?leadSource=uverify%20wall (accessed on 20 November 2022).
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Longo, M.; Foiadelli, F. Estimation Model of Total Energy Consumptions of Electrical Vehicles under Different Driving Conditions. Energies 2021, 14, 854. [Google Scholar] [CrossRef]
- Fotouhi, A.; Shateri, N.; Laila, D.S.; Auger, D.J. Electric vehicle energy consumption estimation for a fleet management system. Int. J. Sustain. Transp. 2021, 15, 40–54. [Google Scholar] [CrossRef]
- Wang, J.; Besselink, I.; Nijmeijer, H. Battery electric vehicle energy consumption prediction for a trip based on route information. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 232, 1528–1542. [Google Scholar] [CrossRef] [Green Version]
- Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Data-driven decomposition analysis and estimation of link-level electric vehicle energy consumption under real-world traffic conditions. Transp. Res. Part D Transp. Environ. 2018, 64, 36–52. [Google Scholar] [CrossRef] [Green Version]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Energy consumption of electric vehicles: Models’ estimation using big data (FCD). Transp. Res. Procedia 2020, 47, 211–218. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Zahid, M.; Jamal, A. Electric vehicle energy consumption prediction using stacked generalization: An ensemble learning approach. Int. J. Green Energy 2021, 18, 896–909. [Google Scholar] [CrossRef]
- Hulagu, S.; Celikoglu, H.B. Electric Vehicle Location Routing Problem With Vehicle Motion Dynamics-Based Energy Consumption and Recovery. IEEE Trans. Intell. Transp. Syst. 2022, 23, 10275–10286. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. Analyzing the Impact of Roadmap and Vehicle Features on Electric Vehicles Energy Consumption. IEEE Access 2021, 9, 61475–61488. [Google Scholar] [CrossRef]
- Madhusudhanan, A.K.; Na, X. Effect of a traffic speed based cruise control on an electric vehicle’ s performance and an energy consumption model of an electric vehicle. IEEE/CAA J. Autom. Sin. 2020, 7, 386–394. [Google Scholar] [CrossRef]
- Yao, E.; Yang, Z.; Song, Y.; Zuo, T. Comparison of Electric Vehicle’s Energy Consumption Factors for Different Road Types. Discret. Dyn. Nat. Soc. 2013, 2013, 328757. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Besselink, I.; Nijmeijer, H. Electric Vehicle Energy Consumption Modelling and Prediction Based on Road Information. World Electr. Veh. J. 2015, 7, 447–458. [Google Scholar] [CrossRef] [Green Version]
- El-Bayeh, C.Z.; Alzaareer, K.; Aldaoudeyeh, A.-M.I.; Brahmi, B.; Zellagui, M. Charging and Discharging Strategies of Electric Vehicles: A Survey. World Electr. Veh. J. 2021, 12, 11. [Google Scholar] [CrossRef]
- Qu, Z.; Song, J.; Liu, Y.; Lv, H.; Hu, K.; Sun, J.; Li, M.; Liu, W.; Cui, M.; Wang, W. Optimization Model of EV Charging and Discharging Price Considering Vehicle Owner Response and Power Grid Cost. J. Electr. Eng. Technol. 2019, 14, 2251–2261. [Google Scholar] [CrossRef] [Green Version]
- Das, R.; Wang, Y.; Busawon, K.; Putrus, G.; Neaimeh, M. Real-time multi-objective optimisation for electric vehicle charging management. J. Clean. Prod. 2021, 292, 126066. [Google Scholar] [CrossRef]
- Jin, H.; Lee, S.; Nengroo, S.H.; Har, D. Development of Charging/Discharging Scheduling Algorithm for Economical and Energy-Efficient Operation of Multi-EV Charging Station. Appl. Sci. 2022, 12, 4786. [Google Scholar] [CrossRef]
- Petersen, P.; Sax, E. A Fully Automated Methodology for the Selection and Extraction of Energy-Relevant Features for the Energy Consumption of Battery Electric Vehicles. SN Comput. Sci. 2022, 3, 1–13. [Google Scholar] [CrossRef]
- Smuts, M.; Scholtz, B.; Wesson, J. A Critical Review of Factors Influencing the Remaining Driving Range of Electric Vehicles. In Proceedings of the 2017 1st International Conference on Next Generation Computing Applications (NextComp), Moka, Mauritius, 19–21 July 2017. [Google Scholar]
- Li, W.; Stanula, P.; Egede, P.; Kara, S.; Herrmann, C. Determining the Main Factors Influencing the Energy Consumption of Electric Vehicles in the Usage Phase. Procedia CIRP 2016, 48, 352–357. [Google Scholar] [CrossRef] [Green Version]
- EV Auxiliary Systems Impacts. 2019. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/auxiliary.pdf (accessed on 20 November 2022).
- Plantin, J.-C. Digital Traces in Context|Google Maps as Cartographic Infrastructure: From Participatory Mapmaking to Database Maintenance. Int. J. Commun. 2018, 12. [Google Scholar]
- Qi, X.; Zhang, Y. Data-Driven Macroscopic Energy Consumption Estimation for Electric Vehicles with Different Information Availability. In Proceedings of the 2016 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 15–17 December 2016; pp. 1214–1219. [Google Scholar]
- Braun, A.; Rid, W. Energy consumption of an electric and an internal combustion passenger car. A comparative case study from real world data on the Erfurt circuit in Germany. Transp. Res. Procedia 2017, 27, 468–475. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Sensitivity analysis of environmental factors for electric vehicles energy consumption. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Getting Directions through the Directions API. Available online: https://developers.google.com/maps/documentation/directions/get-directions (accessed on 20 November 2022).
- Maljković, M.; Stamenković, D.; Blagojevic, I.; Popovic, V. The Analysis of Available Data on Energy Efficiency of Electric Vehicles to be Used for Eco-Driving Project Development. Sci. Technol. 2019, 18, 504–508. [Google Scholar] [CrossRef] [Green Version]
- Chau, K.T. 21—Pure electric vehicles. In Alternative Fuels and Advanced Vehicle Technologies for Improved Environmental Performance; Folkson, R., Ed.; Woodhead Publishing: Somerset, UK, 2014; pp. 655–684. [Google Scholar]
- Hartley, J.A.A.; McLellan, R.G.; Richmond, J.; Day, A.J.; Campean, I.F. Regenerative braking system evaluation on a full electric vehicle. In Innovations in Fuel Economy and Sustainable Road Transport; Woodhead Publishing: Somerset, UK, 2011; pp. 73–86. [Google Scholar]
- Google Map Platform. Available online: https://developers.google.com/maps/documentation/gaming-/reference/unity/class/google-/maps/feature/segment-metadata (accessed on 20 November 2022).
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D Transp. Environ. 2015, 41, 177–187. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Estimation Algorithm’s Inputs | The Complication of the Estimation Algorithm | Including SOC Estimation for the Trip? | Estimation Algorithm’s Accuracy |
|---|---|---|---|---|
| EV’s energy consumption factors for different road types [13] |
| ✓ | No | N/A |
| Estimation Model of Total Energy Consumptions [4] |
| ✓ ✓ | No | N/A |
| Energy consumption estimation for a EV fleet management system [5] |
| ✓ ✓ | No | 80–98% |
| Energy estimation based on the route information [6] |
| ✓ ✓ ✓ | No | 95% |
| Estimation of link-level energy consumption under real-world traffic conditions [7] |
| ✓ ✓ ✓ | No | 87–95% |
| EV energy consumption prediction based on road information [14] |
| ✓ ✓ ✓ ✓ | No | 95% |
| Parameter | Value |
|---|---|
| Battery Capacity | 34.5 () |
| Nameplate Range | 150.17 miles |
| Vehicle mass | 1715 kg |
| Vehicle front area | 2.32 m2 |
| Drag coefficient | 0.28 |
| Rolling resistance coefficient | 0.012 |
| Density of the air | 1.2 |
| Section | Distance (m) | Travel Duration (s) | Elavation (m) | SOC Estimation (%) |
|---|---|---|---|---|
| 1 | 57 | 14 | 0.007477 | 0.08% |
| 2 | 83 | 58 | −0.00558 | 0.06% |
| 3 | 434 | 65 | 0.053772 | 0.00% |
| 4 | 86 | 28 | 0.003861 | 0.73% |
| 5 | 90 | 18 | −0.0003 | 0.00% |
| 6 | 294 | 40 | 0.041632 | 0.05% |
| 7 | 350 | 42 | 0.029166 | 0.39% |
| 8 | 673 | 64 | −0.05281 | 0.36% |
| 9 | 267 | 32 | 0.006341 | −0.52% |
| 10 | 293 | 37 | 0.043358 | 0.07% |
| 11 | 3913 | 413 | 0.063082 | 0.36% |
| 12 | 754 | 162 | 0.037003 | 6.76% |
| Parameters | Estimation Using Model in [6] | Estimation of the Proposed Model | Recorded |
|---|---|---|---|
| Distance | 7294 m | 7294 m | 8047 m |
| Traveling time | 16.22 min | 16.22 min | 15 min |
| SOC used | 9.06% | 11.33% | 9% |
| Trip | R1 | R2 | R3 | R4 | R5 | R6 | Recorded SOC Change (%) |
|---|---|---|---|---|---|---|---|
| 1 | 78 | 60 | 6437.38 | 19 | 5.65 | 4 | 4 |
| 2 | 86 | 68 | 8046.72 | 17 | 7.89 | 4 | 9 |
| 3 | 78 | 68 | 4828.03 | 11 | 7.32 | 4 | −1 |
| 4 | 80 | 0 | 4828.03 | 11 | 7.32 | 4 | 6 |
| 5 | 78 | 0 | 4828.03 | 11 | 7.32 | 4 | −3 |
| 6 | 78 | 0 | 3218.69 | 9 | 5.96 | 4 | 1 |
| 7 | 84 | 68 | 38,624.26 | 34 | 18.93 | 4 | 15 |
| 8 | 86 | 68 | 38,624.26 | 40 | 16.09 | 4 | 17 |
| 9 | 78 | 68 | 14,484.10 | 17 | 14.2 | 4 | 12 |
| 10 | 73 | 68 | 11,265.41 | 30 | 6.26 | 4 | 0 |
| 11 | 77 | 68 | 16,093.44 | 41 | 6.54 | 4 | 9 |
| 12 | 82 | 68 | 22,530.82 | 29 | 12.95 | 4 | 8 |
| Estimation Model in [6] | The Proposed Estimation Model | |
|---|---|---|
| Recorded data | 9/12 = 75% | 10/12 = 83.33% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, Q.T.; Roose, L.; Vichitpunt, C.; Thongmai, K.; Noisopa, K. A Comprehensive Model to Estimate Electric Vehicle Battery’s State of Charge for a Pre-Scheduled Trip Based on Energy Consumption Estimation. Clean Technol. 2023, 5, 25-37. https://doi.org/10.3390/cleantechnol5010002
Tran QT, Roose L, Vichitpunt C, Thongmai K, Noisopa K. A Comprehensive Model to Estimate Electric Vehicle Battery’s State of Charge for a Pre-Scheduled Trip Based on Energy Consumption Estimation. Clean Technologies. 2023; 5(1):25-37. https://doi.org/10.3390/cleantechnol5010002
Chicago/Turabian StyleTran, Quynh T., Leon Roose, Chayaphol Vichitpunt, Kumpanat Thongmai, and Krittanat Noisopa. 2023. "A Comprehensive Model to Estimate Electric Vehicle Battery’s State of Charge for a Pre-Scheduled Trip Based on Energy Consumption Estimation" Clean Technologies 5, no. 1: 25-37. https://doi.org/10.3390/cleantechnol5010002