

Basic Study on Mechanical Vibration Suppression System Using 2-Degree-of-Freedom Vibration Analysis
 , , and
, , and
Abstract
:1. Introduction
2. Vibration Analysis of 2-DOF System
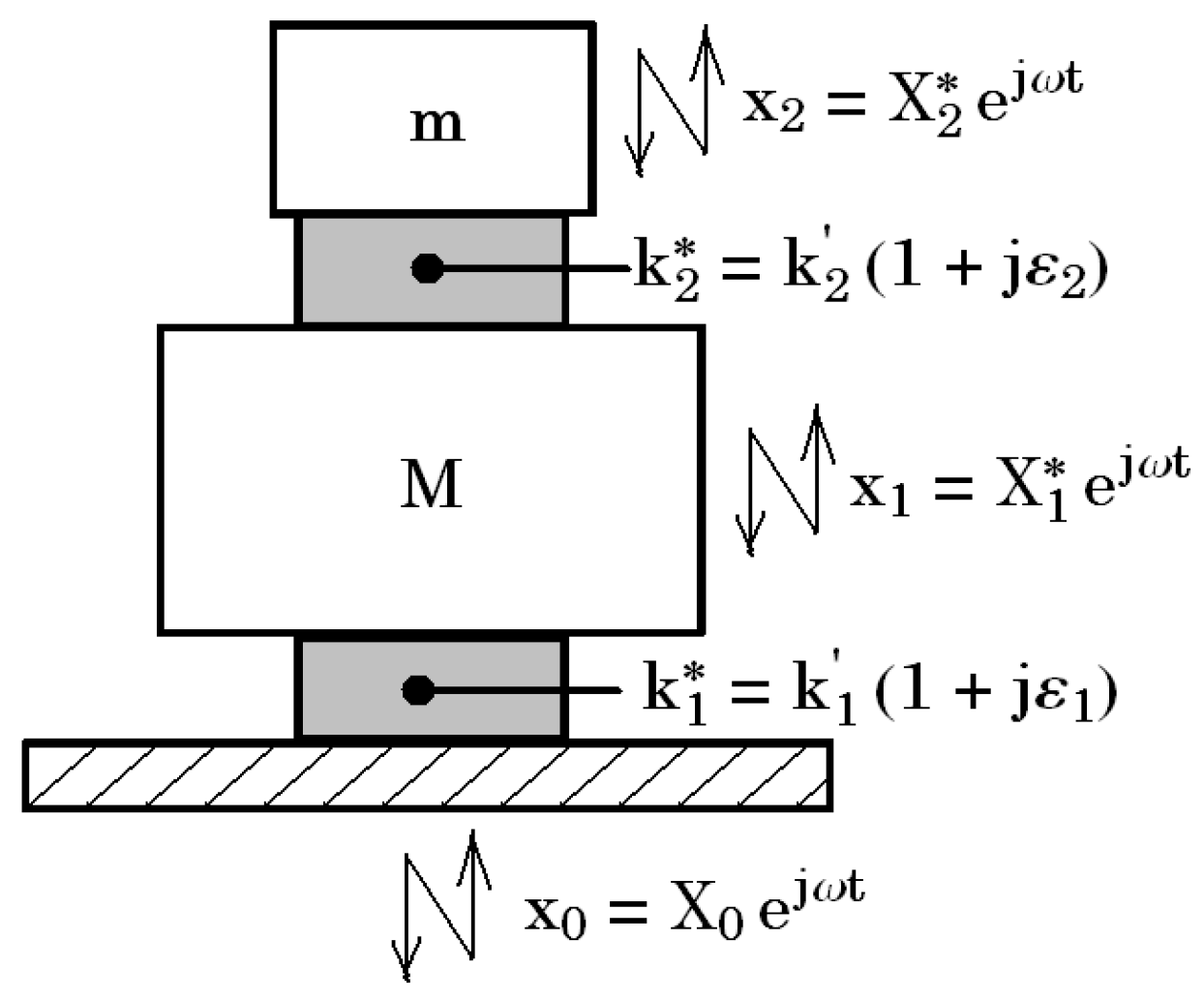
2.1. Analysis Model of the System Using Viscoelastic Body
2.2. Analysis Model in Which a Viscoelastic Body and Spring Are Installed in Parallel in the Main Mass
3. Analysis by Changing Each Parameter in a 2-DOF Vibration System Model
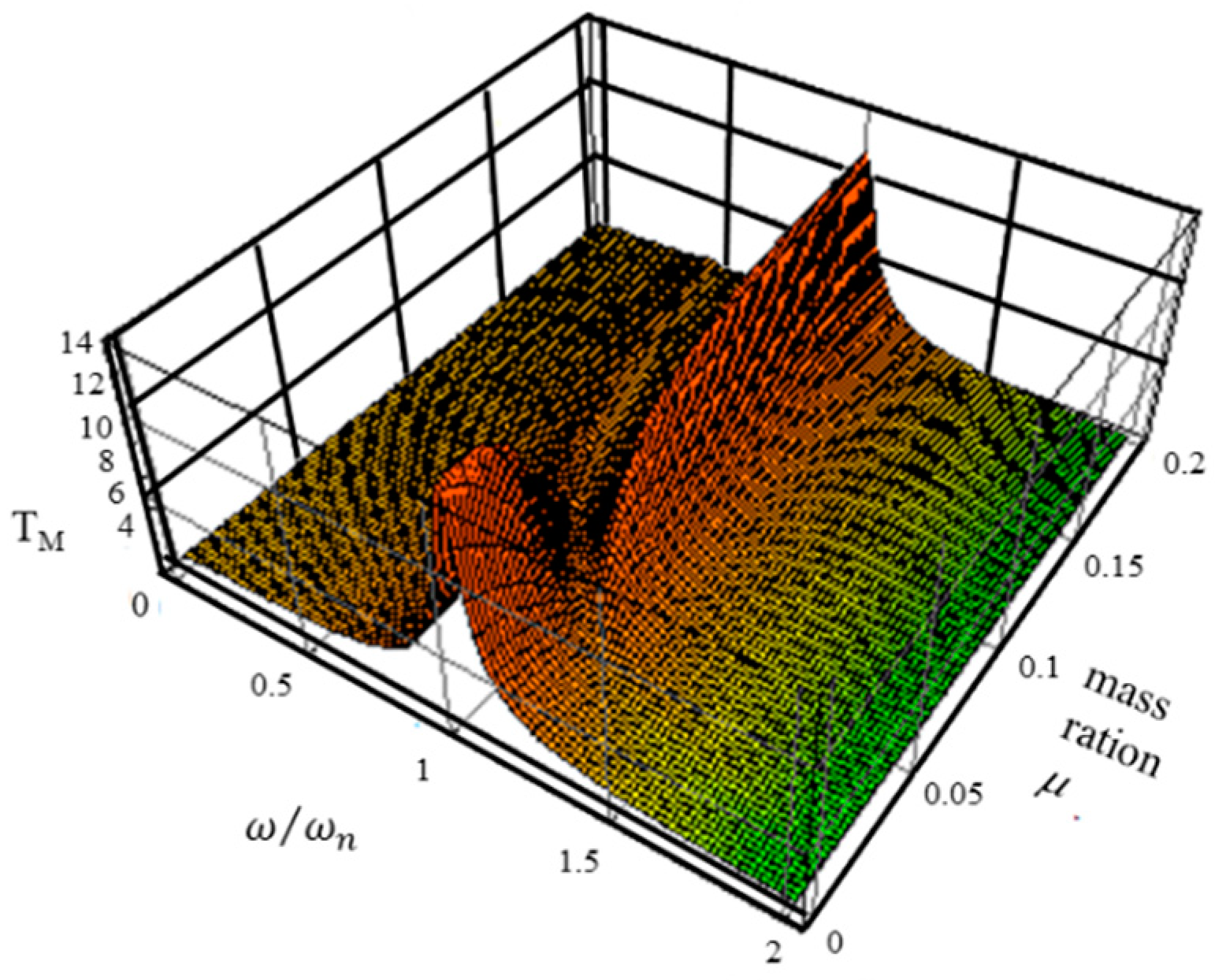
3.1. Resonance Vibration Analysis by Changing Mass Ratio μ
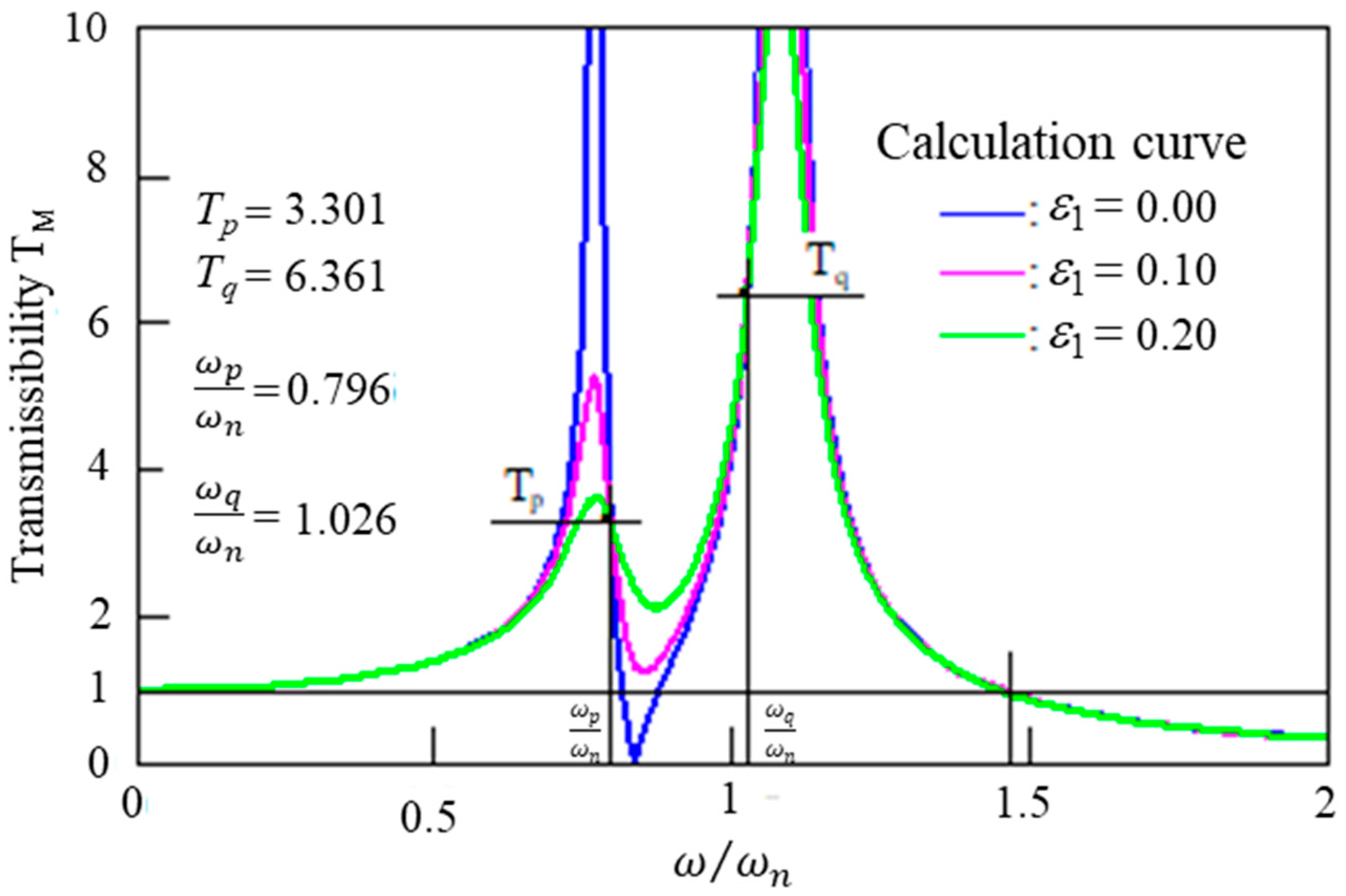
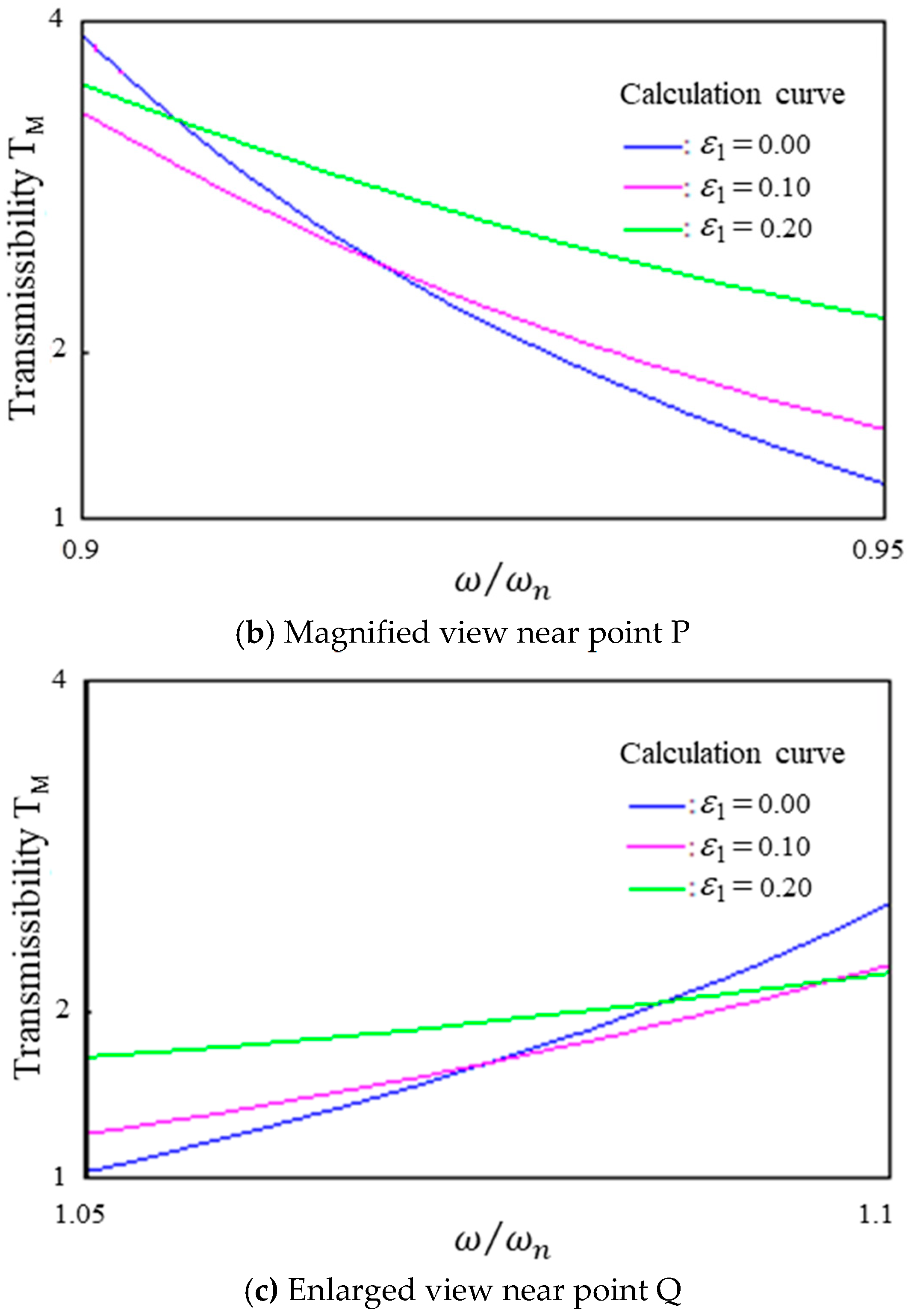
3.2. Resonance Vibration Analysis of 2-DOF System without the Loss Factor in the Main System
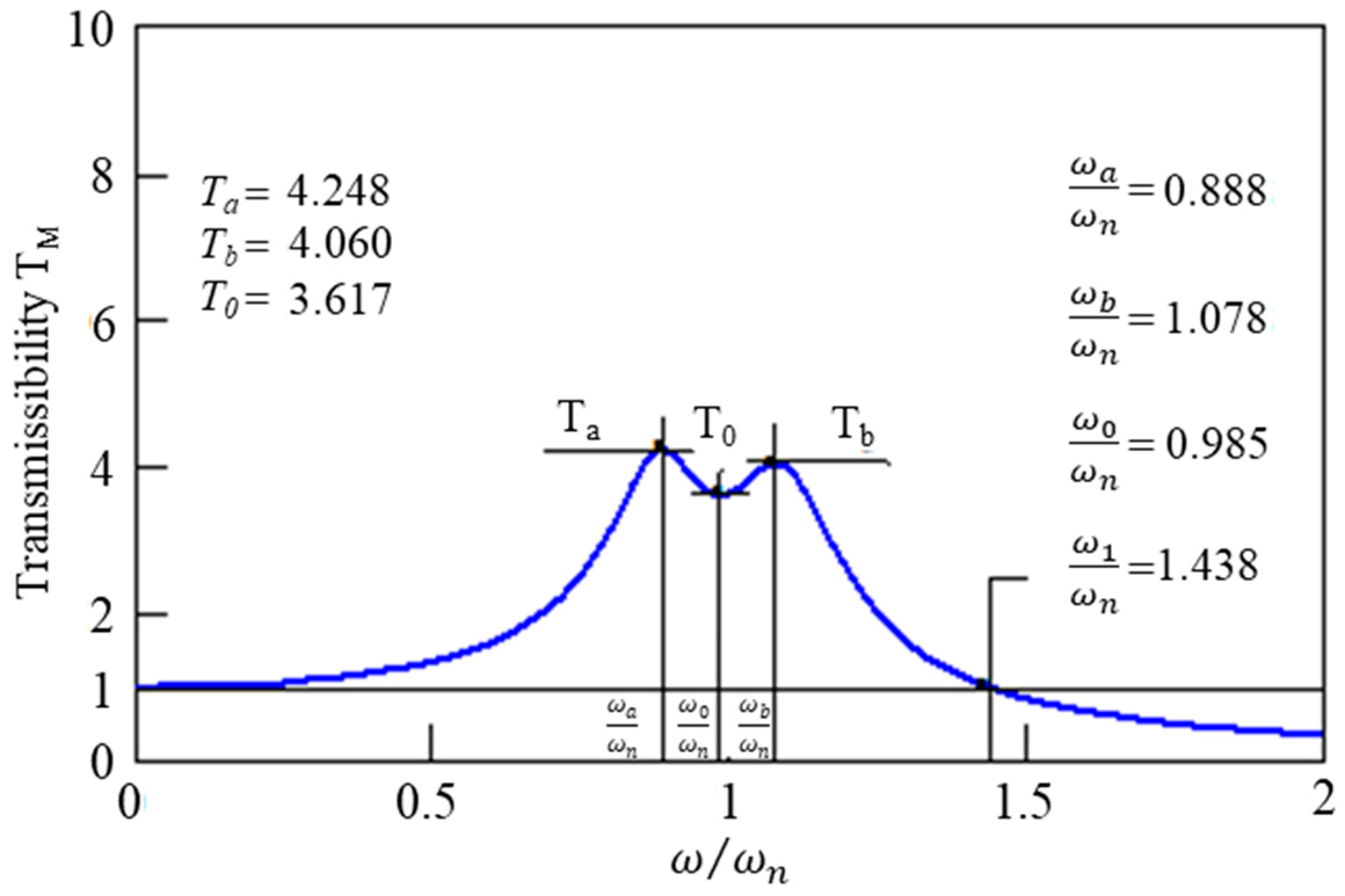
3.3. Resonance Vibration Analysis of 2-DOF System with the Loss Factor in the Main System
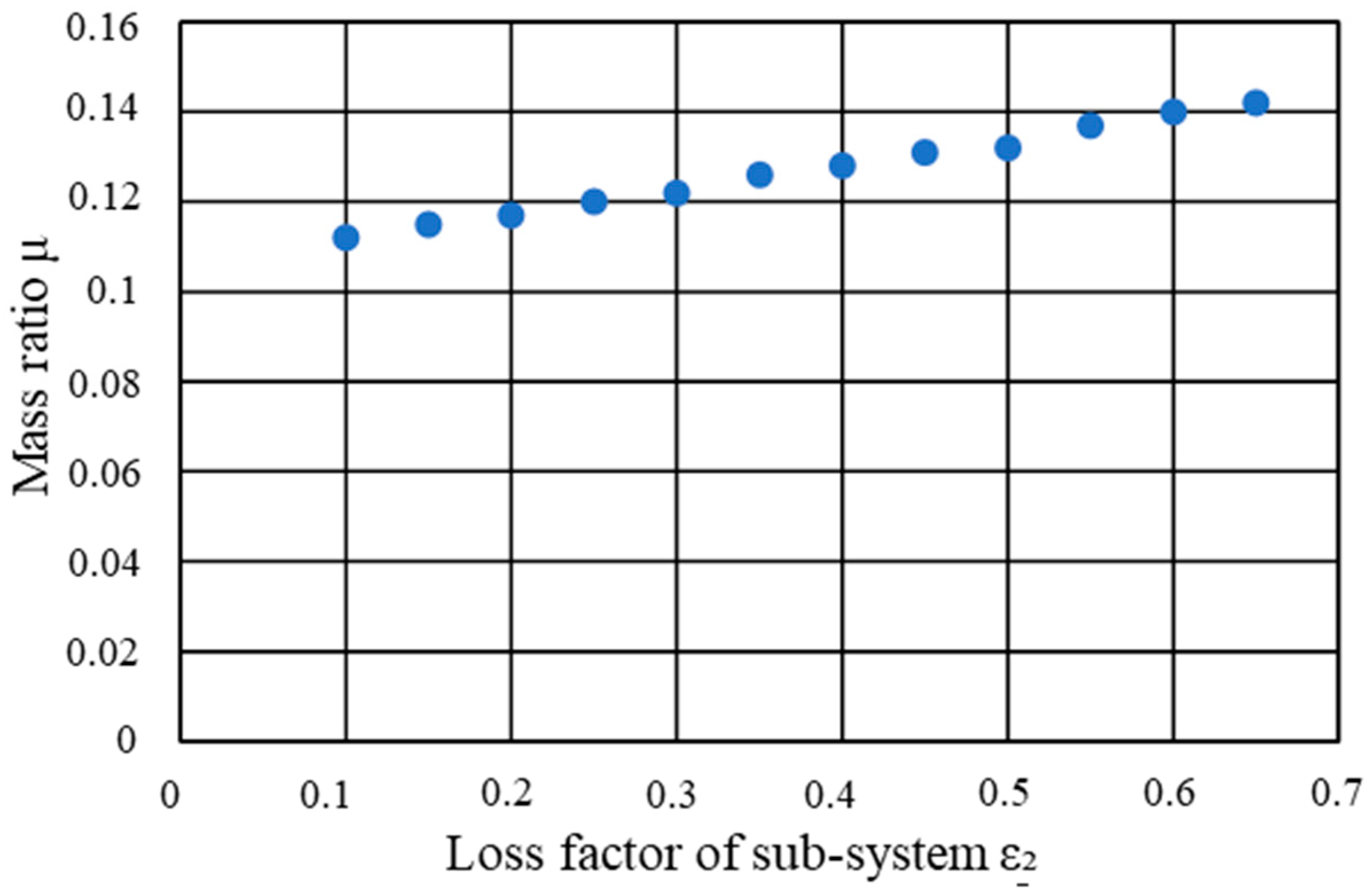
3.4. Optimization Method in 2-DOF System with a Damping Factor by Varying the Mass Ratio
4. Forced Vibration Experiments for 2-DOF System with Damping Factor
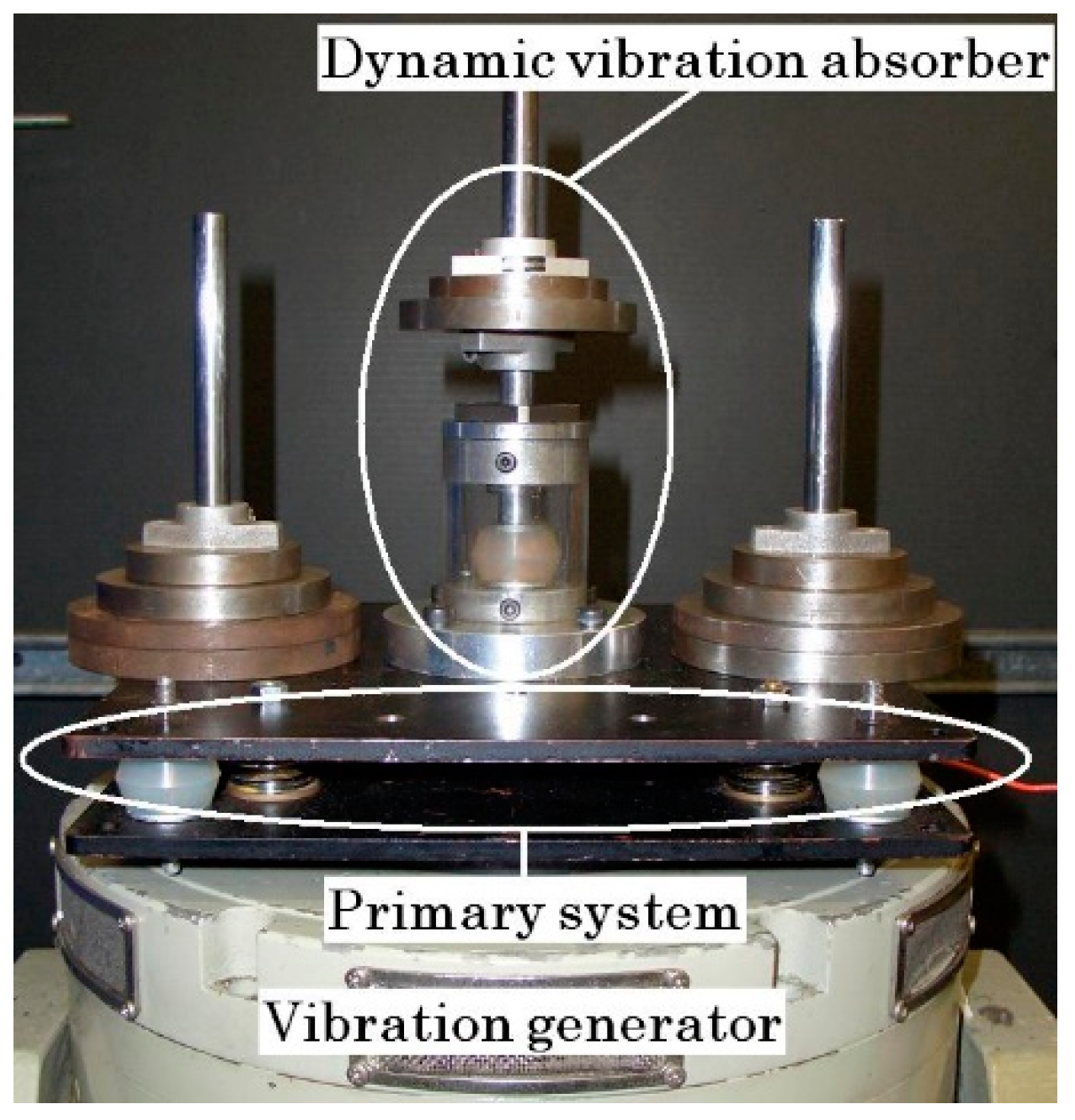
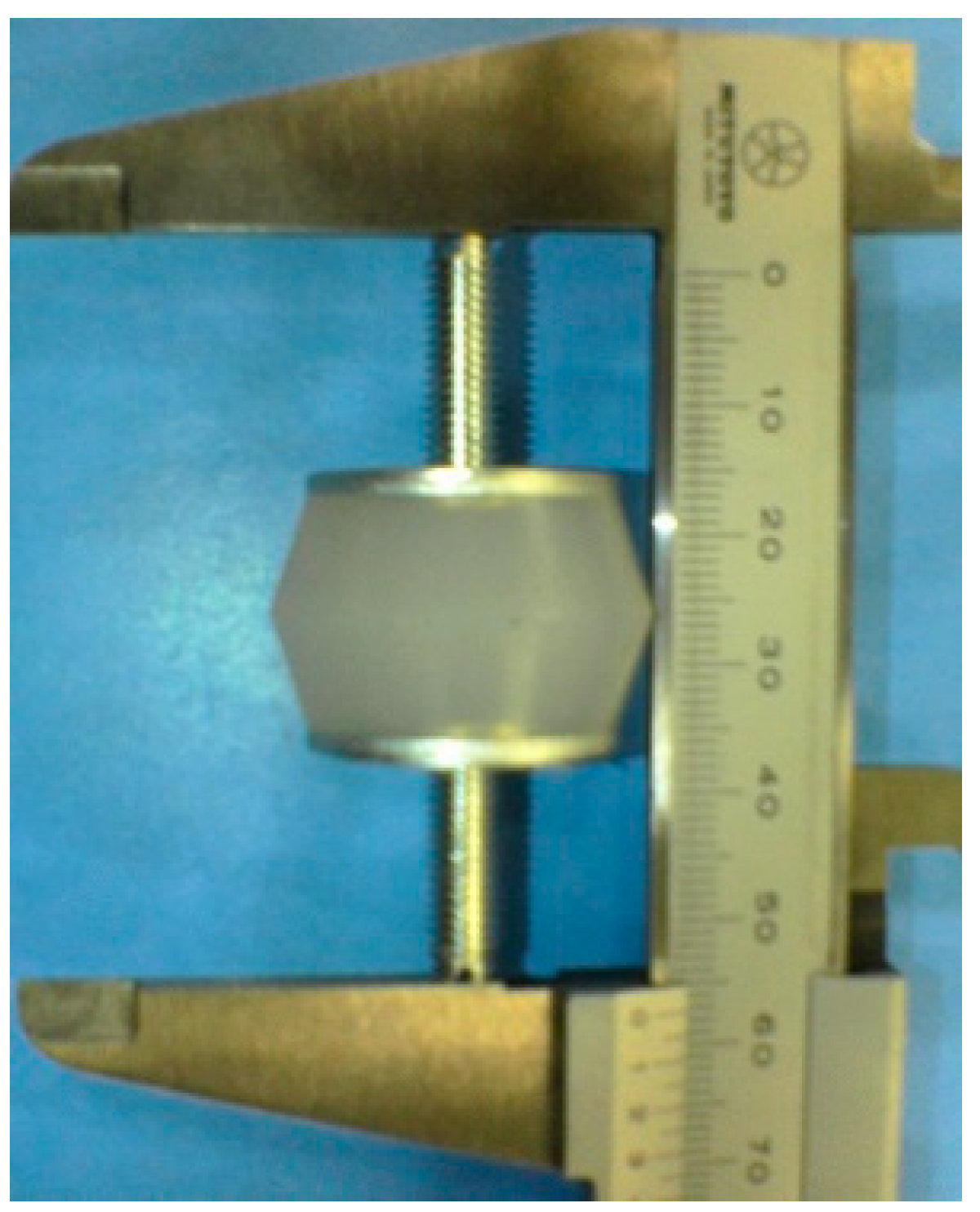
4.1. Conditions of Forced Vibration Experiments
4.2. Experimenatal Results of Forced Vibration Using 2-DOF System with Damping Factor
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Valeev, A.; Zotov, A. Application of complex technology for monitoring and vibration protection of industrial equipment and analysis of its efficiency. In Proceedings of the 2020 International Conference on Dynamics and Vibroacoustics of Machines, Samara, Russia, 16–18 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Furinghetti, M. Definition and Validation of Fast Design Procedures for Seismic Isolation Systems. Vibration 2022, 5, 290–305. [Google Scholar] [CrossRef]
- Koszewnik, A.; Gosiewski, Z. Quasi-optimal locations of piezo-elements on a rectangular plate. Eur. Phys. J. Plus 2016, 131, 232. [Google Scholar] [CrossRef]
- Koszewnik, A.; Gosiewski, Z. Frequency domain identification of the active 3D mechanical structure for the vibration control system. J. Vibroengineering 2012, 14, 451–457. [Google Scholar]
- Grądzki, R.; Lindstedt, P.; Kulesza, Z.; Bartoszewicz, B. Rotor Blades Diagnosis Method Based on Differences in Phase Shifts. Shock. Vib. 2018, 2018, 9134607. [Google Scholar] [CrossRef]
- Gradzki, R.; Kulesza, Z.; Bartoszewicz, B. Method of shaft crack detection based on squared gain of vibration amplitude. Nonlinear Dyn. 2019, 98, 671–690. [Google Scholar] [CrossRef]
- Shaw, A.D.; Hill, T.L.; Neild, S.A.; Friswell, M.I. Multiharmonic Resonance Control Testing of an Internally Resonant Structure. Vibration 2020, 3, 217–234. [Google Scholar] [CrossRef]
- Yuan, M.; Jin, Y.; Liu, K.; Sadhu, A. Optimization of a Non-Traditional Vibration Absorber for Vibration Suppression and Energy Harvesting. Vibration 2022, 5, 383–407. [Google Scholar] [CrossRef]
- Olgac, N.; Jenkins, R. Actively Tuned Noncollocated Vibration Absorption: An Unexplored Venue in Vibration Science and a Benchmark Problem. IEEE Trans. Control Syst. Technol. 2020, 29, 294–304. [Google Scholar] [CrossRef]
- Ikeda, K.; Endo, A.; Minowa, R.; Kato, H.; Narita, T. A basic study on influence of jerk on riding comfort using active seat suspension for ultra-compact mobility. Int. J. Appl. Electromagn. Mech. 2020, 64, 1505–1513. [Google Scholar] [CrossRef]
- Ikeda, K.; Kuroda, J.; Uchino, D.; Ogawa, K.; Endo, A.; Kato, T.; Kato, H.; Narita, T. A Study of a Ride Comfort Control System for Ultra-Compact Vehicles Using Biometric Information. Appl. Sci. 2022, 12, 7425. [Google Scholar] [CrossRef]
- Zeng, j.; Xia, W.; Xiang, X.; Long, Z. Research on the Mechanism and Control Characteistics of Vehicle-Trac Beam Coupling ibration for Medium-Speed Maglev Vehicle. IEEE Trans. Transp. Electrif. 2022, 8, 3236–3246. [Google Scholar] [CrossRef]
- Ren, T.; Deng, Z.; Kou, L.; Li, Y.; Wang, L. Vibration Characteristics of HTS Maglev System Levitated Above a Halbach Per-maneent Magnet Track. IEEE Trans. Appl. Supercond. 2022, 32, 3601605. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Shan, Y.; Shen, Y.; He, T. Analysis and Optimization of the Novel Inerter-Based Dynamic Vibration Ab-sorbers. IEEE Access 2018, 6, 33169–33182. [Google Scholar] [CrossRef]
- Burnett, K.J.; Choi, T.Y.; Li, H.; Wereley, M.N.; Miller, H.R.; Shim, K.J. Vibration Suppression of a Composite Prosthetic Foot Using Piezoelectric Shunt Damping: Implications to Vibration-Induced Cumulative Trauma. IEEE Trans. Biomed. Eng. 2021, 68, 2741–2751. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, K.; Miyazaki, R.; Uchida, Y.; Kobayashi, I.; Kuroda, J.; Uchino, D.; Ikeda, K.; Kato, T.; Endo, A.; Narita, T.; et al. Experimental Consideration on Suppression Effect of Elastic Vibration in Electromagnetic Levitation System for Flexible Thin Steel Plate with Curvature. Vibration 2022, 5, 817–828. [Google Scholar] [CrossRef]
- Yuan, M.; Liu, K. Vibration Suppression and Energy Harvesting with a Non-traditional Vibration Absorber: Transient Re-sponses. Vibration 2018, 1, 105–122. [Google Scholar] [CrossRef]
- Chen, T.; Lou, J.; Ren, Z.; Wei, Y. Optimal Switching Time Control for Suppressing Residual Vibration in a High-Speed Macro-Micro Manipulator System. IEEE Trans. Control Syst. Technol. 2021, 30, 360–367. [Google Scholar] [CrossRef]
- Ji, Z.; Cheng, S.; Lv, Y.; Wang, D.; Sun, W.; Li, X. The Mechanism for Suppressing High-Frequency Vibration of Multiphase Surface Permanent Magnet Motors via PWM Carrier Phase Shifting. IEEE Trans. Power Electron. 2021, 36, 10504–10513. [Google Scholar] [CrossRef]
- Seto, K.; Maruyama, K. Vibration Engineering, 1st ed.; Morikita Publishing Co., Ltd.: Tokyo, Japan, 2002; pp. 201–232. [Google Scholar]
- Badkoobehhezaveh, H.; Fotouhi, R.; Zhang, Q.; Bitner, D. Vibration Analysis of a 5-DOF Long-Reach Robotic Arm. Vibration 2022, 5, 585–602. [Google Scholar] [CrossRef]
- Williams, D.; Tagihpour, J.; Khodaparast, H.H.; Jiffri, S. Linear Control of a Nonlinear Equipment Mounting Link. Vibration 2021, 4, 679–699. [Google Scholar] [CrossRef]
- Brock, J.E. A Note on the Damped Vibration Absorber. J. Appl. Mech. 1946, 13, A284. [Google Scholar] [CrossRef]
- Boris, G.K.; Leonid, M.R. Dynamic Vibration Absorbers: Theory and Technical Application; John Wiley & Sons: Hoboken, NJ, USA, 1993; pp. 7–16. [Google Scholar]
- Nishihara, O.; Matsuhisa, H. Design of a Dynamic Vibration Absorber for Minimization of Maximum Amplitude Magnifi-cation Factor: Derivation of Algebraic Exact Solution. Trans. Jpn. Soc. Mech. Eng. Ser. C 1997, 63, 3438–3445. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Viscoelastic Body | MN-3 | MN-7 |
|---|---|---|
| Dynamic spring constant [N/m] | 12.7 | 114.1 |
| Loss factor ε | 0.203 | 0.103 |
| Parameters | Values |
|---|---|
| Vibration time [s] | 120 |
| Frequency [Hz] | 5–60 |
| Input acceleration [m/s2] | 1.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ikeda, K.; Kamimori, K.; Kobayashi, I.; Kuroda, J.; Uchino, D.; Ogawa, K.; Endo, A.; Kato, T.; Liu, X.; Peeie, M.H.B.; et al. Basic Study on Mechanical Vibration Suppression System Using 2-Degree-of-Freedom Vibration Analysis. Vibration 2023, 6, 407-420. https://doi.org/10.3390/vibration6020025
Ikeda K, Kamimori K, Kobayashi I, Kuroda J, Uchino D, Ogawa K, Endo A, Kato T, Liu X, Peeie MHB, et al. Basic Study on Mechanical Vibration Suppression System Using 2-Degree-of-Freedom Vibration Analysis. Vibration. 2023; 6(2):407-420. https://doi.org/10.3390/vibration6020025
Chicago/Turabian StyleIkeda, Keigo, Kota Kamimori, Ikkei Kobayashi, Jumpei Kuroda, Daigo Uchino, Kazuki Ogawa, Ayato Endo, Taro Kato, Xiaojun Liu, Mohamad Heerwan Bin Peeie, and et al. 2023. "Basic Study on Mechanical Vibration Suppression System Using 2-Degree-of-Freedom Vibration Analysis" Vibration 6, no. 2: 407-420. https://doi.org/10.3390/vibration6020025