
Prescribed Performance Control-Based Semi-Active Vibration Controller for Seat Suspension Equipped with an Electromagnetic Damper
 and
and
Abstract
:1. Introduction
- A new semi-active seat suspension is developed by taking advantage of the controllable EMD;
- A semi-active strategy based on PPC is designed for the semi-active seat suspension to guarantee the desired vibration isolation performance under different road conditions;
- By combining model simulation and practical experiments, the effectiveness of the seat suspension and the controller in vibration control is validated.
2. Semi-Active Seat Suspension with the EMD
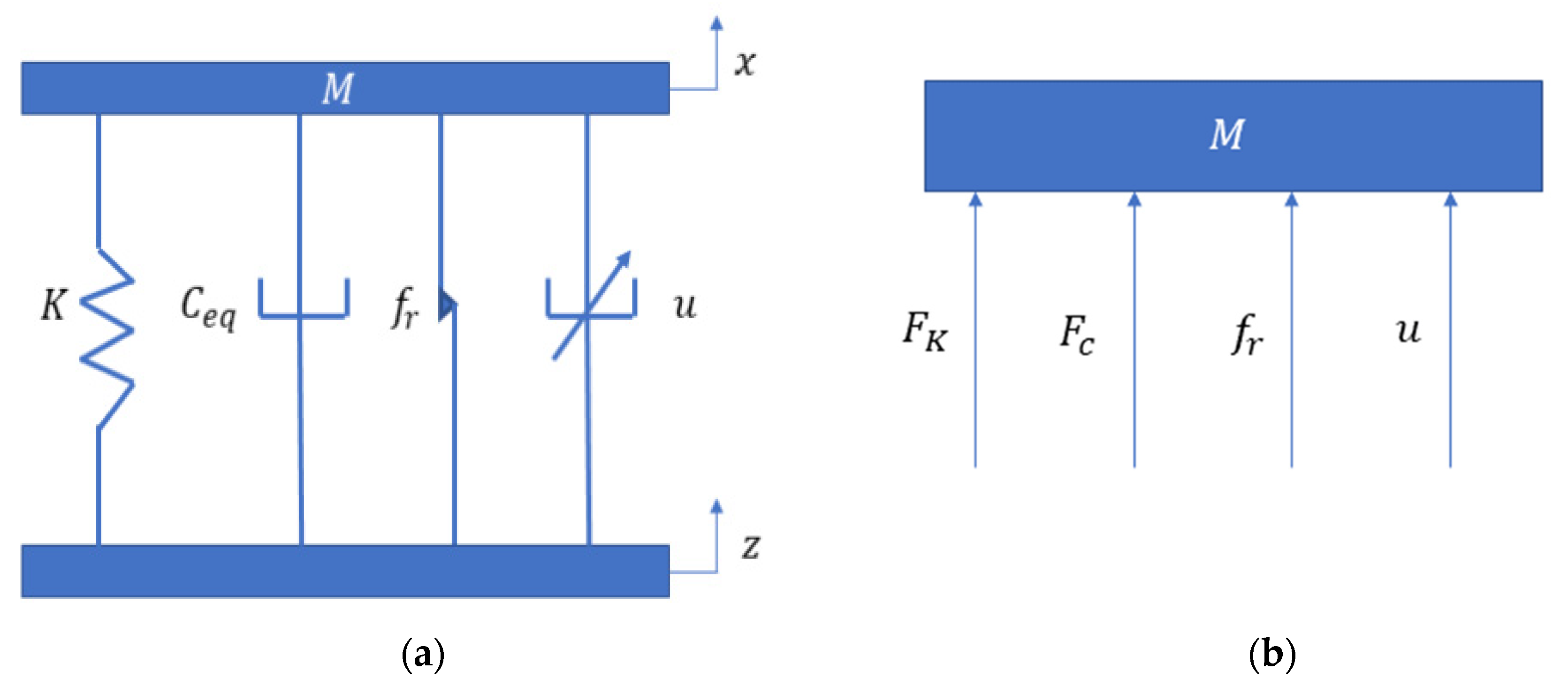
2.1. The Variable Damping Seat Suspension
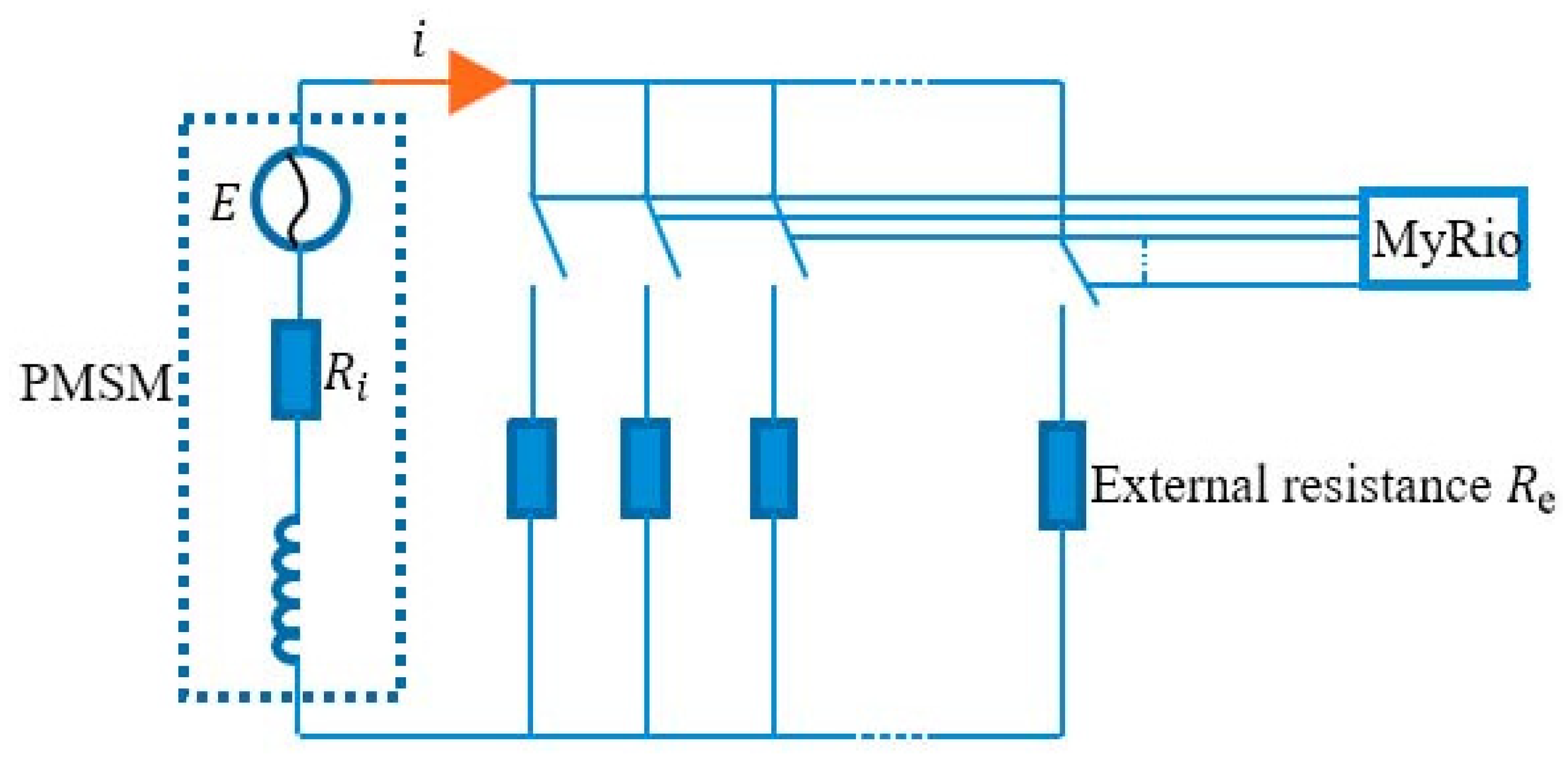
2.2. The Damping Controllable System
3. Semi-Active Controller with Prescribed Performance Control
3.1. Problem Description
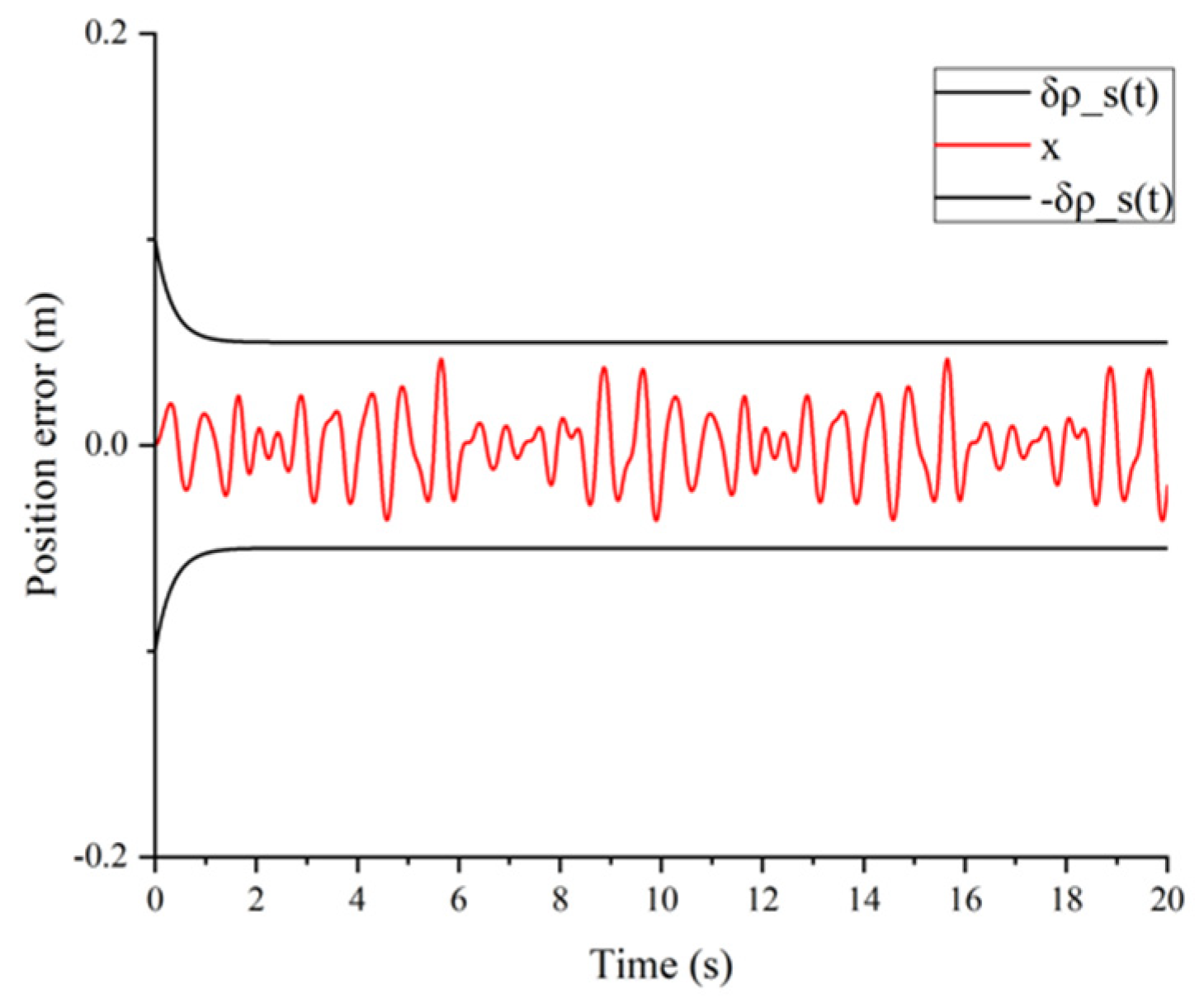
- The output of the system can track the desired trajectory while maintaining the boundedness of all signals in the closed loop.
- The tracking error meets the specified transient and steady-state performance limits.
3.2. The Design of the PPC
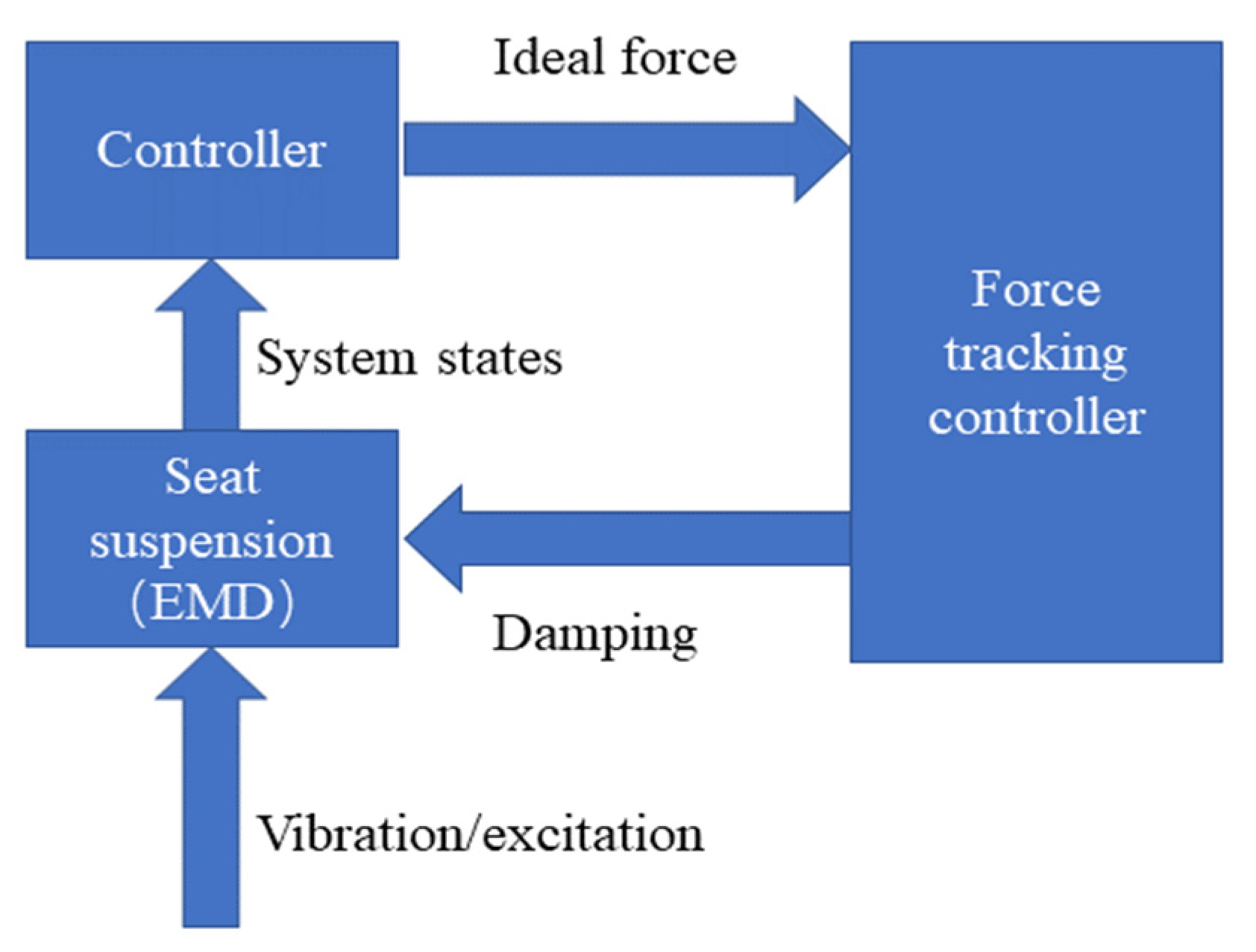
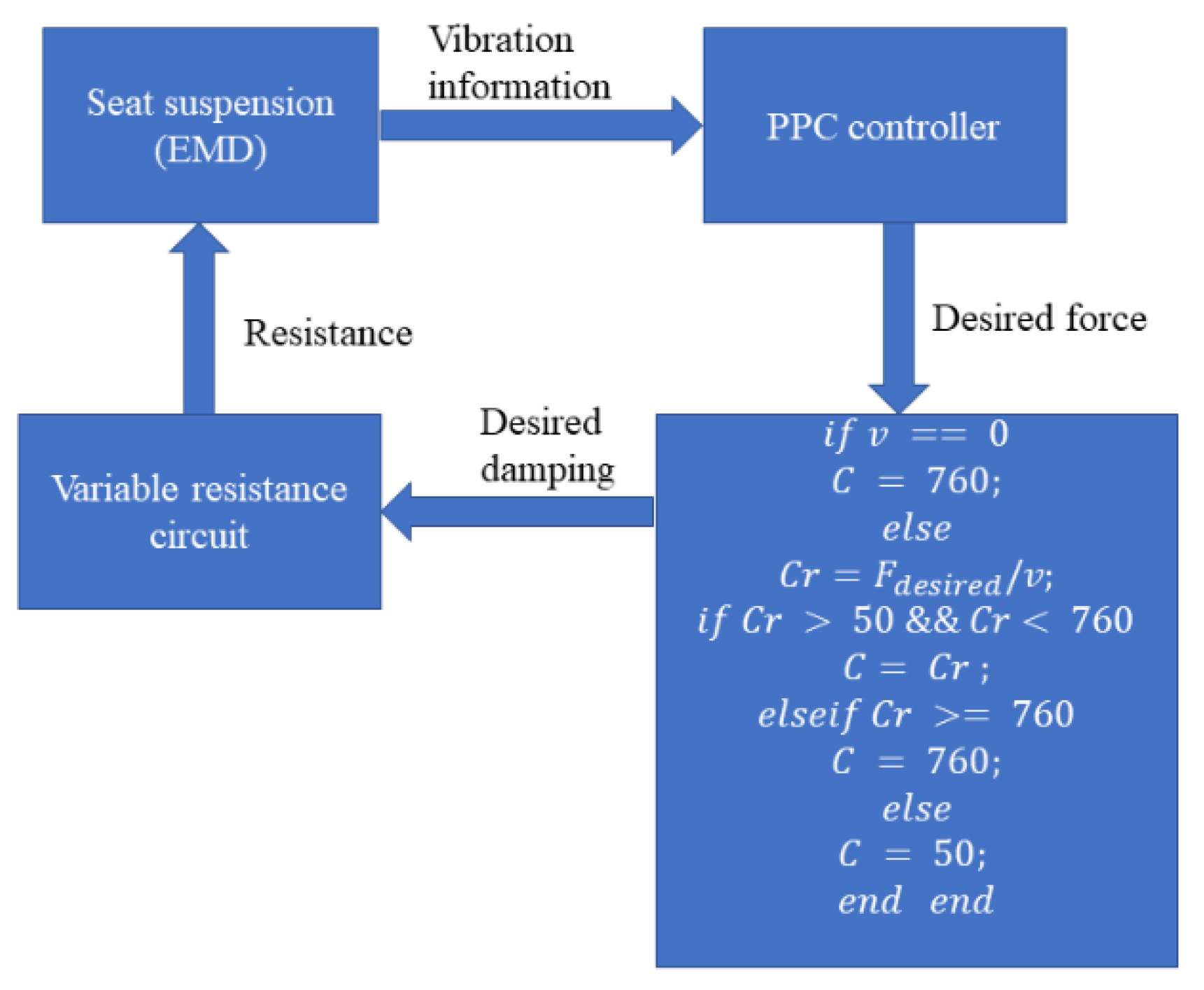
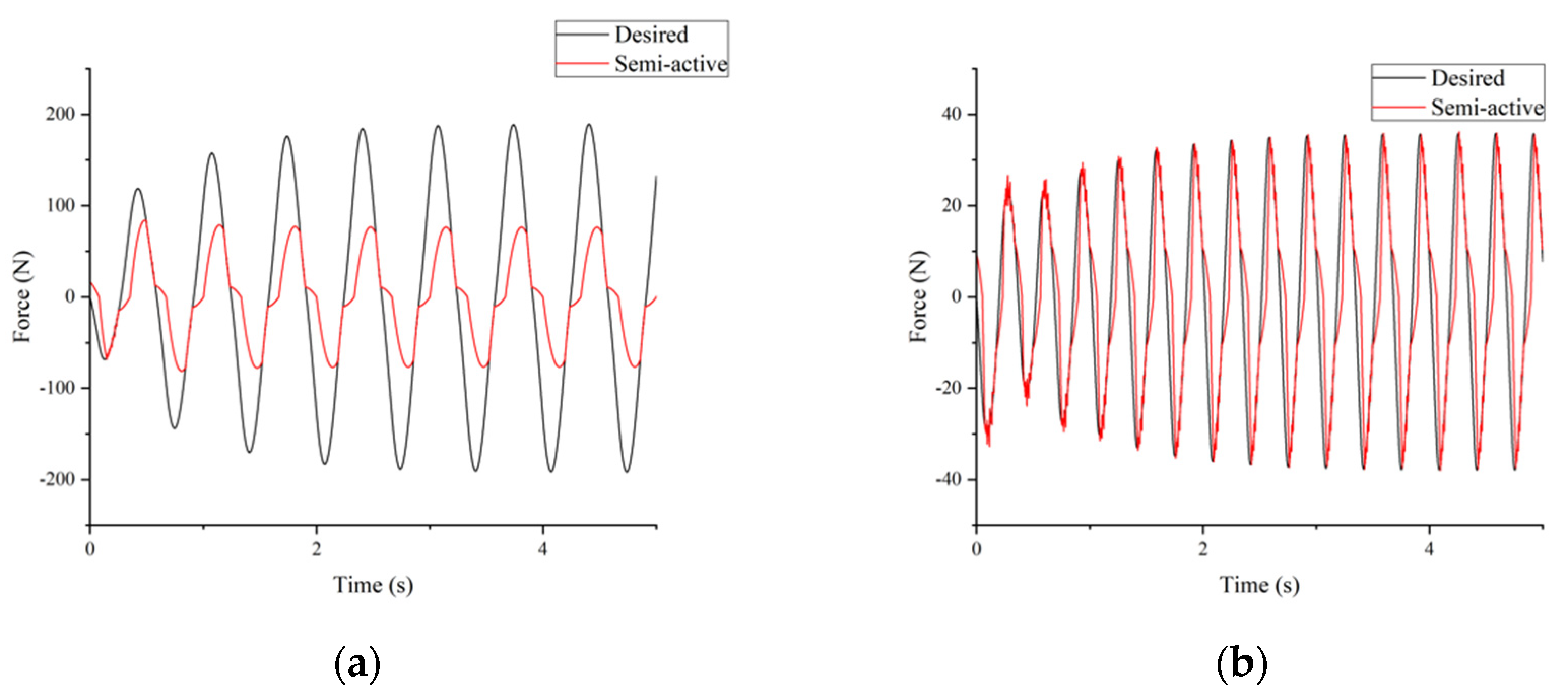
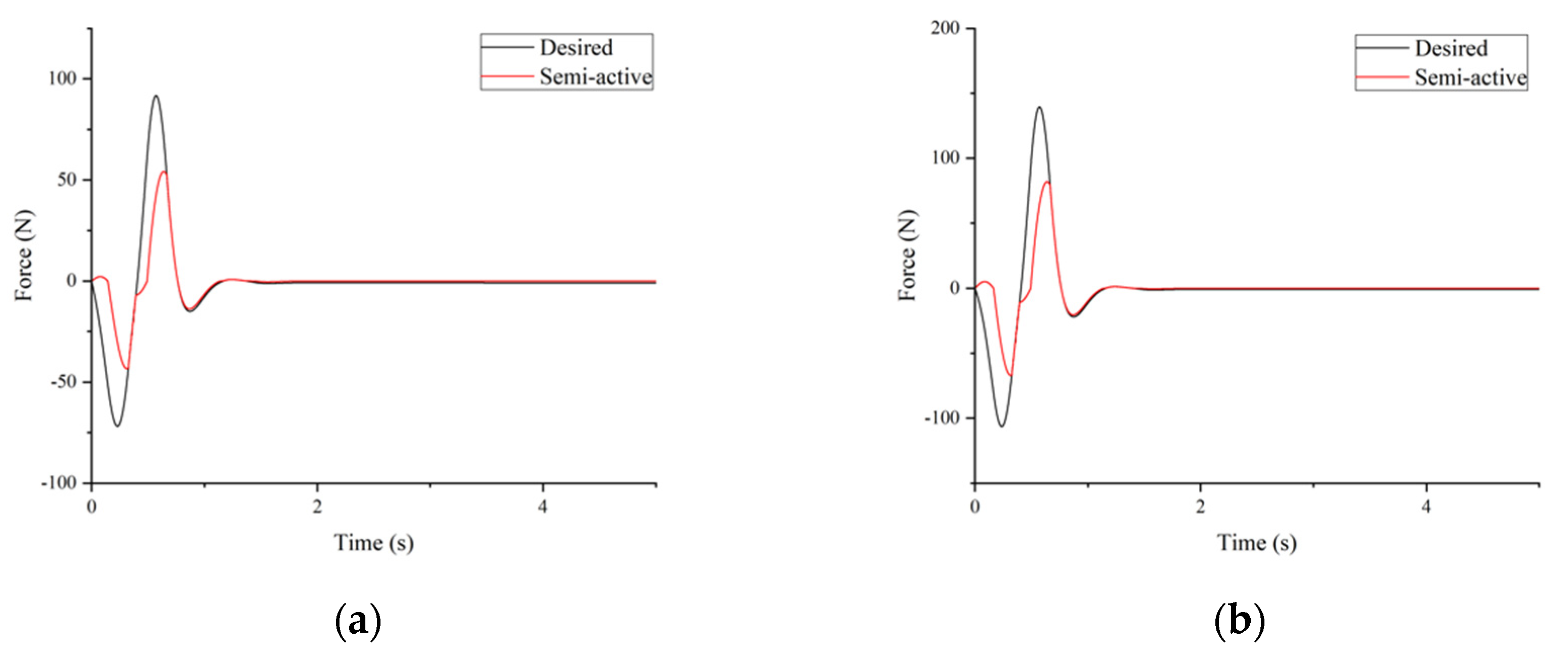
3.3. Force Tracking Strategy
4. Performance Evaluation
4.1. Numerical Analysis
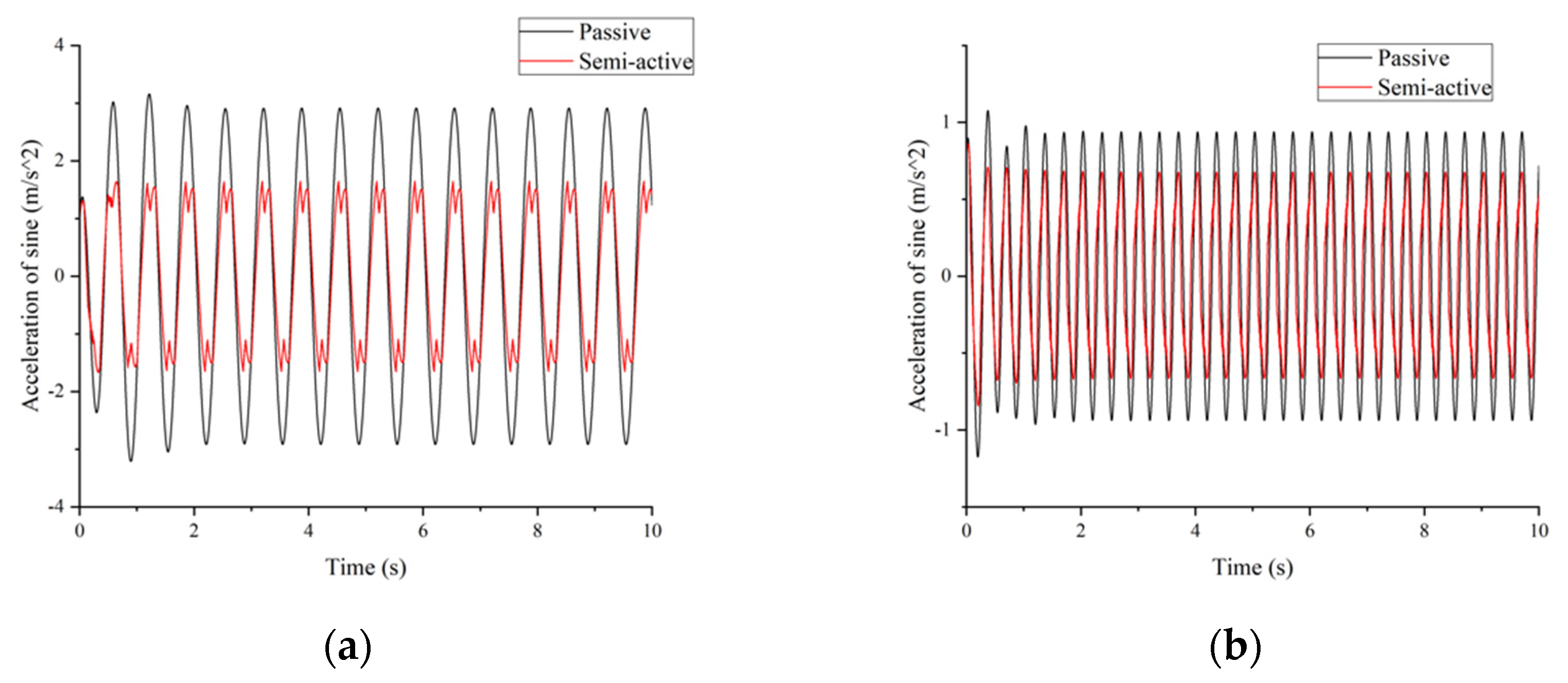
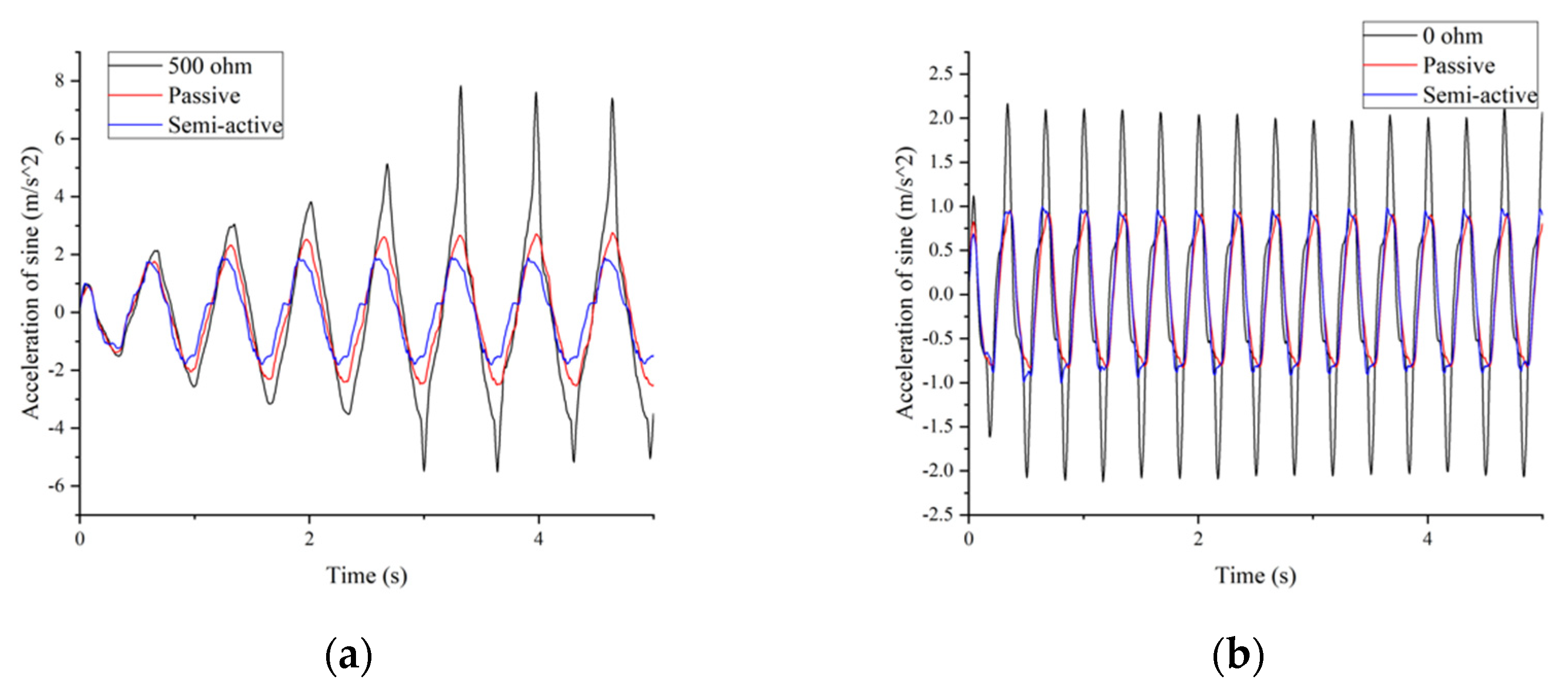
4.1.1. Sine Vibration Simulation
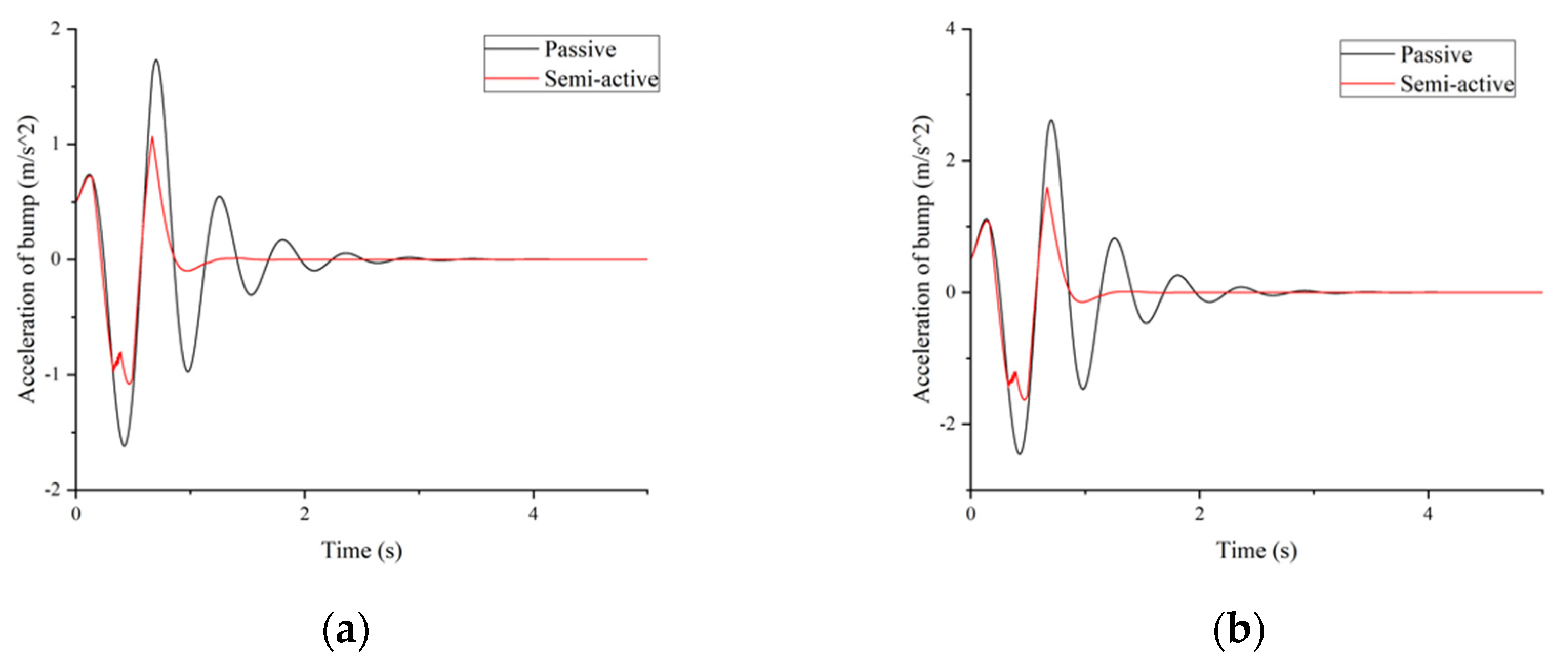
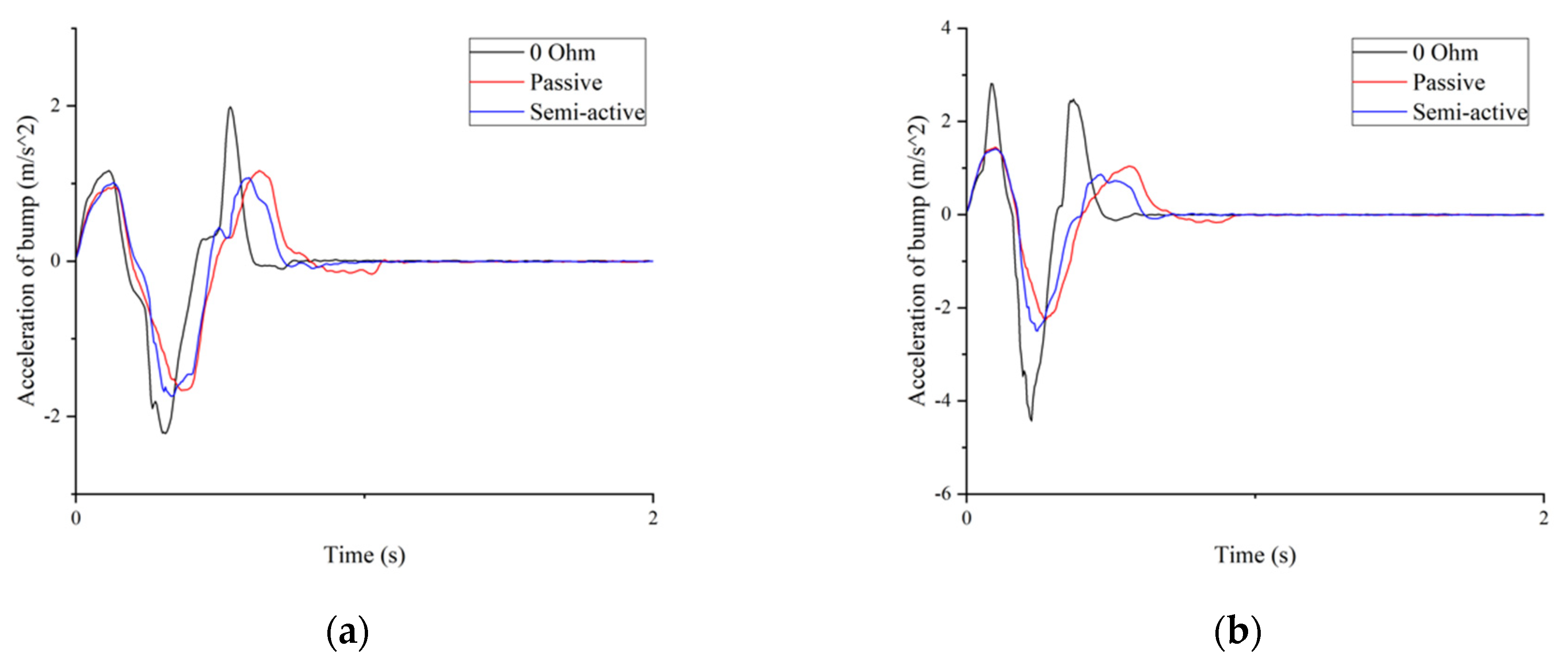
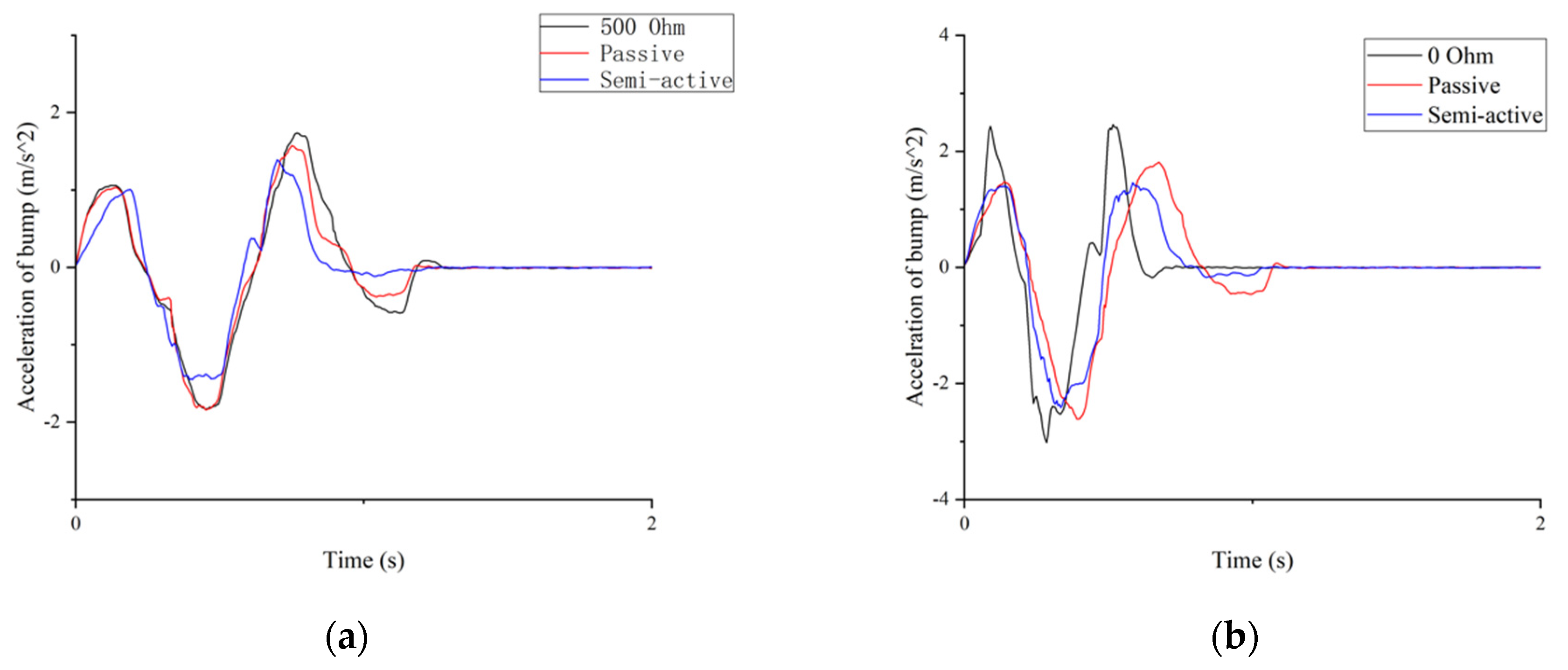
4.1.2. Bump Vibration Simulation
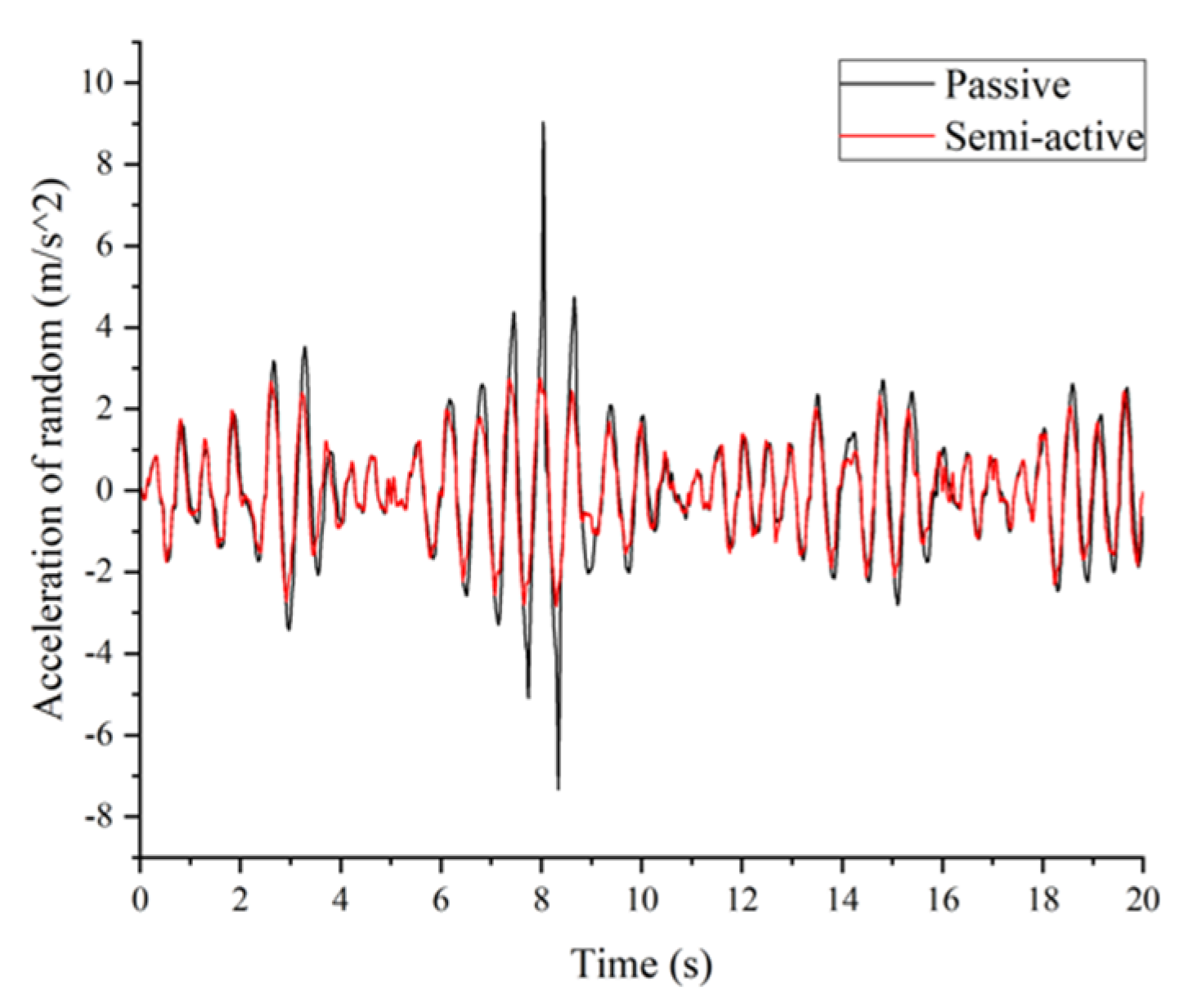
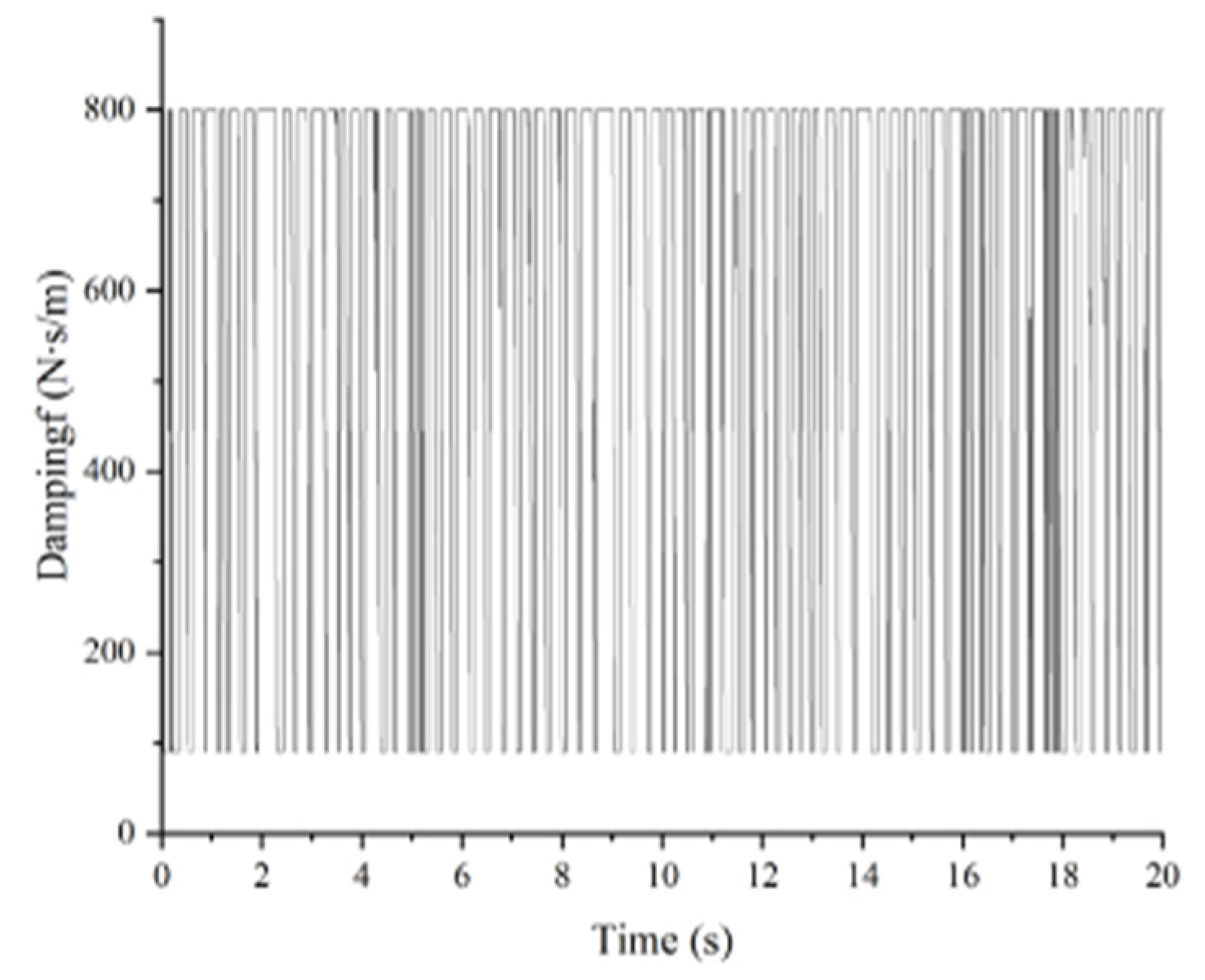
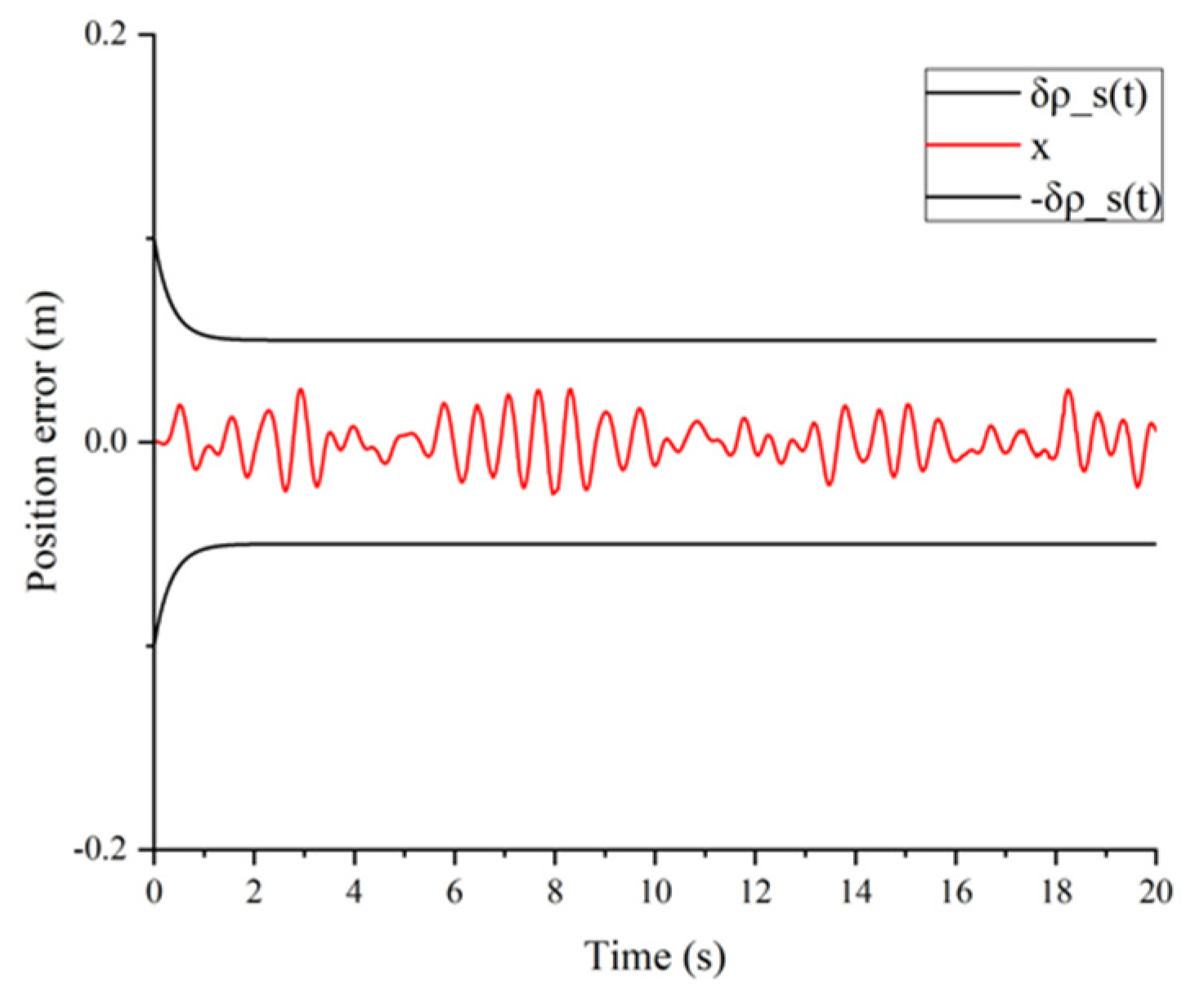
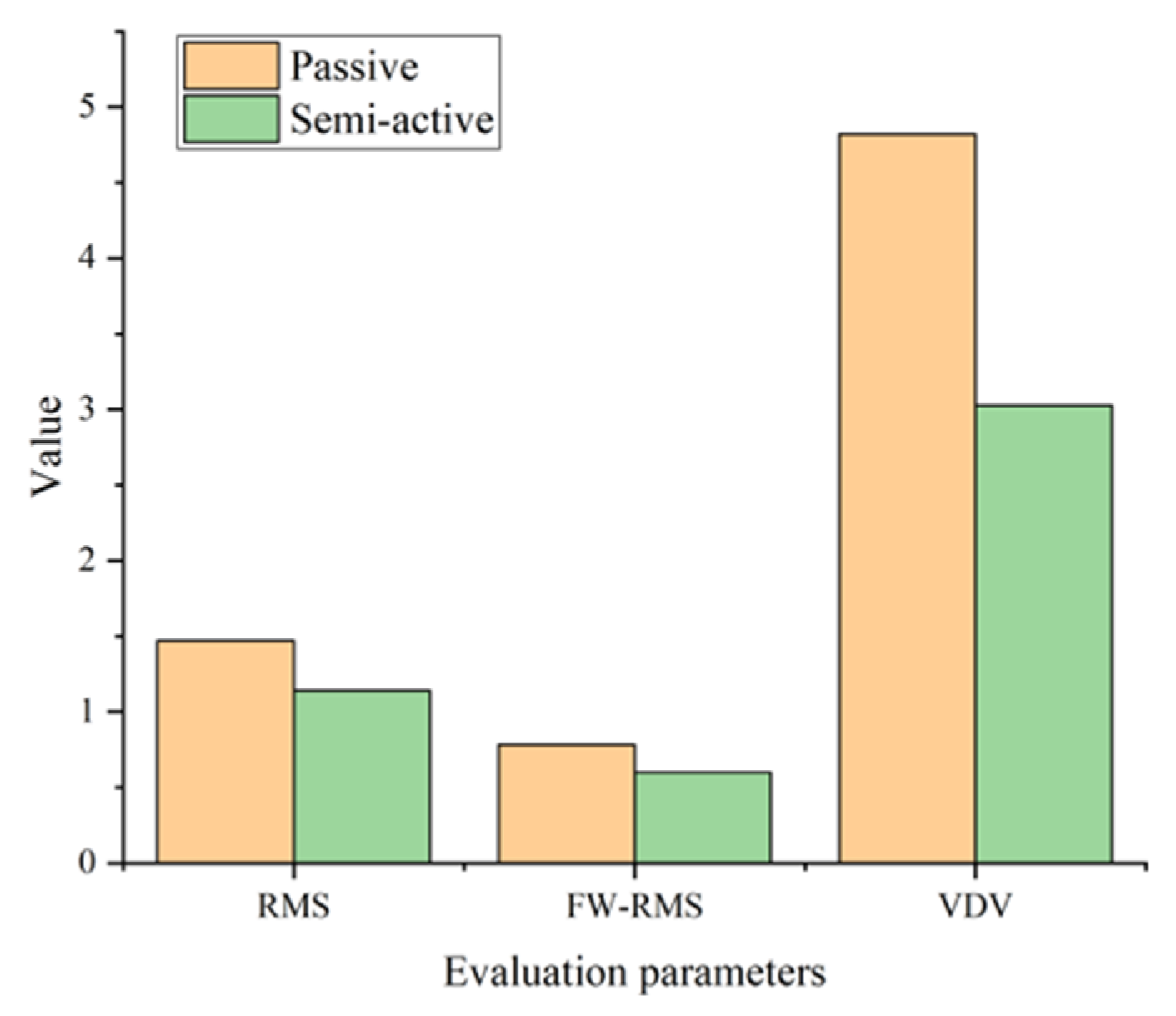
4.1.3. Random Vibration Simulation
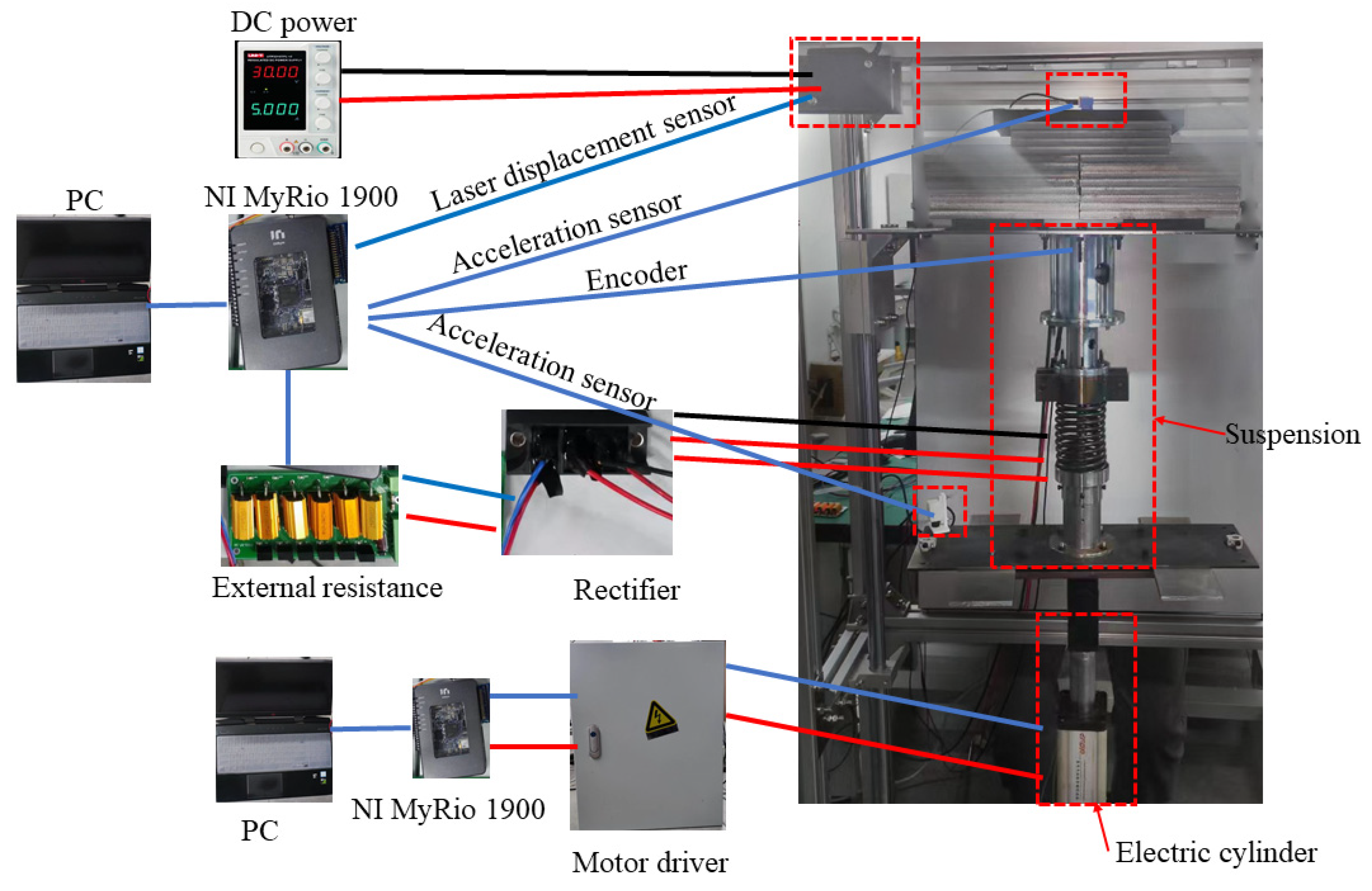
4.2. Experiment
4.2.1. Experimental Setup
4.2.2. Sine Vibration Test
4.2.3. Bump Vibration Test
4.2.4. Random Vibration Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dennerlein, J.T.; Cavallari, J.M.; Kim, J.H.J.; Green, N.H. The effects of a new seat suspension system on whole body vibration exposure and driver low back pain and disability: Results from a randomized controlled trial in truck drivers. Appl. Ergon. 2022, 98, 103588. [Google Scholar] [CrossRef] [PubMed]
- Virtanen, I.M.; Karppinen, J.; Taimela, S.; Ott, J.; Barral, S.; Kaikkonen, K.; Heikkilä, O.; Mutanen, P.; Noponen, N.; Männikkö, M.; et al. Occupational and Genetic Risk Factors Associated with Intervertebral Disc Disease. Spine 2007, 32, 1129–1134. [Google Scholar] [CrossRef]
- Paddan, G.S.; Griffin, M.J. Evaluation of Whole-Body Vibration in Vehicles. J. Sound Vib. 2002, 253, 195–213. [Google Scholar] [CrossRef]
- Pazooki, A.; Rakheja, S.; Cao, D. Modeling and validation of off-road vehicle ride dynamics. Mech. Syst. Signal Process. 2012, 28, 679–695. [Google Scholar] [CrossRef] [Green Version]
- Stein, G.J.; Múčka, P. Study of simultaneous shock and vibration control by a fore-and-aft suspension system of a driver’s seat. Int. J. Ind. Ergon. 2011, 41, 520–529. [Google Scholar] [CrossRef]
- Pazooki, A.; Cao, D.; Rakheja, S.; Boileau, P.-É. Ride dynamic evaluations and design optimisation of a torsio-elastic off-road vehicle suspension. Veh. Syst. Dyn. 2011, 49, 1455–1476. [Google Scholar] [CrossRef] [Green Version]
- Velmurugan, P.; Kumaraswamidhas, L.A.; Sankaranarayanasamy, K. Whole Body Vibration Analysis for Drivers of Suspended Cabin Tractor Semitrailer. Exp. Tech. 2014, 38, 47–53. [Google Scholar] [CrossRef]
- Zhao, X.; Kremb, M.; Schindler, C. Assessment of wheel loader vibration on the riding comfort according to ISO standards. Veh. Syst. Dyn. 2013, 51, 1548–1567. [Google Scholar] [CrossRef]
- Carrella, A. Passive Vibration Isolators with High-Static-Low-Dynamic-Stiffness; University of Southampton: Southampton, UK, 2008. [Google Scholar]
- Carrella, A.; Brennan, M.J.; Waters, T.P.; Lopes, V. Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness. Int. J. Mech. Sci. 2012, 55, 22–29. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P.; Shin, K. On the design of a high-static–low-dynamic stiffness isolator using linear mechanical springs and magnets. J. Sound Vib. 2008, 315, 712–720. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P. Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 2007, 301, 678–689. [Google Scholar] [CrossRef]
- Le, T.D.; Ahn, K.K. A vibration isolation system in low frequency excitation region using negative stiffness structure for vehicle seat. J. Sound Vib. 2011, 330, 6311–6335. [Google Scholar] [CrossRef]
- Le, T.D.; Ahn, K.K. Experimental investigation of a vibration isolation system using negative stiffness structure. Int. J. Mech. Sci. 2013, 70, 99–112. [Google Scholar] [CrossRef]
- Yan, Z.; Zhu, B.; Li, X.; Wang, G. Modeling and Analysis of Static and Dynamic Characteristics of Nonlinear Seat Suspension for Off-Road Vehicles. Shock. Vib. 2015, 2015, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Zhang, X.; Luo, Y.; Yan, B.; Ma, C. Design and experiment of a high-static–low-dynamic stiffness isolator using a negative stiffness magnetic spring. J. Sound Vib. 2016, 360, 31–52. [Google Scholar] [CrossRef]
- Han, Y.; Cao, Q.; Ji, J. Nonlinear Dynamics of a Smooth and Discontinuous Oscillator with Multiple Stability. Int. J. Bifurc. Chaos 2016, 25, 1530038. [Google Scholar] [CrossRef]
- Gan, Z.; Hillis, A.J.; Darling, J. Adaptive control of an active seat for occupant vibration reduction. J. Sound Vib. 2015, 349, 39–55. [Google Scholar] [CrossRef] [Green Version]
- Ning, D.; Sun, S.; Li, H.; Du, H.; Li, W. Active control of an innovative seat suspension system with acceleration measurement based friction estimation. J. Sound Vib. 2016, 384, 28–44. [Google Scholar] [CrossRef]
- Ning, D.; Sun, S.; Zhang, F.; Du, H.; Li, W.; Zhang, B. Disturbance observer based Takagi-Sugeno fuzzy control for an active seat suspension. Mech. Syst. Signal Process. 2017, 93, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Choi, S.-B.; Han, Y.-M. Vibration control of electrorheological seat suspension with human-body model using sliding mode control. J. Sound Vib. 2007, 303, 391–404. [Google Scholar] [CrossRef]
- Choi, S.-B.; Nam, M.-H.; Lee, B.-K. Vibration control of a MR seat damper for commercial vehicles. J. Intell. Mater. Syst. Struct. 2000, 11, 936–944. [Google Scholar] [CrossRef]
- Sun, S.S.; Ning, D.H.; Yang, J.; Du, H.; Zhang, S.W.; Li, W.H. A seat suspension with a rotary magnetorheological damper for heavy duty vehicles. Smart Mater. Struct. 2016, 25, 105032. [Google Scholar] [CrossRef] [Green Version]
- Zhu, T.; Wan, H.; Wang, Z.; Wei, M.; Xu, X.; Zou, Z.; Du, S. Model Reference Adaptive Control of Semi-active Suspension Model Based on AdaBoost Algorithm for Rollover Prediction. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 71–86. [Google Scholar]
- Pires, L.; Smith, M.C.; Houghton, N.E.; McMahon, R.A. Design trade-offs for energy regeneration and control in vehicle suspensions. Int. J. Control. 2013, 86, 2022–2034. [Google Scholar] [CrossRef]
- Wang, R.; Ding, R.; Chen, L. Application of hybrid electromagnetic suspension in vibration energy regeneration and active control. J. Vib. Control. 2018, 24, 223–233. [Google Scholar] [CrossRef]
- Khoshnoud, F.; Sundar, D.B.; Badi, M.N.M.; Chen, Y.K.; Calay, R.K.; Silva, C.W.D. Energy harvesting from suspension systems using regenerative force actuators. Int. J. Veh. Noise Vib. 2013, 9, 294. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.; Jendrzejczyk, J.A.; Mulcahy, T.M.; Hull, J.R. Design of electromagnetic shock absorbers. Int. J. Mech. Mater. Des. 2006, 3, 285–291. [Google Scholar] [CrossRef]
- Zhang, J.Q.; Peng, Z.Z.; Lei, Z.; Yu, Z. A Review on Energy-Regenerative Suspension Systems for Vehicles. In Proceedings of the World Congress on Engineering, London, UK, 3–5 July 2013; pp. 3–5. [Google Scholar]
- Li, Z.; Zuo, L.; Luhrs, G.; Lin, L.; Qin, Y.-X. Electromagnetic Energy-Harvesting Shock Absorbers: Design, Modeling, and Road Tests. IEEE Trans. Veh. Technol. 2013, 62, 1065–1074. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Guo, K.; Zhang, X.; Eben Li, S. Electro-hydraulic damper for energy harvesting suspension: Modeling, prototyping and experimental validation. Appl. Energy 2017, 199, 1–12. [Google Scholar] [CrossRef]
- Ning, D.; Du, H.; Sun, S.; Li, W.; Li, W. An Energy Saving Variable Damping Seat Suspension System with Regeneration Capability. IEEE Trans. Ind. Electron. 2018, 65, 8080–8091. [Google Scholar] [CrossRef] [Green Version]
- Bechlioulis, C.P.; Rovithakis, G.A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica 2009, 45, 532–538. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Gai, W.; Wang, H.; Zhang, J.; Li, Y. Adaptive Neural Network Dynamic Inversion with Prescribed Performance for Aircraft Flight Control. J. Appl. Math. 2013, 2013, 452653. [Google Scholar] [CrossRef] [Green Version]
- Bechlioulis, C.P.; Doulgeri, Z.; Rovithakis, G.A. Guaranteeing prescribed performance and contact maintenance via an approximation free robot force/position controller. Automatica 2012, 48, 360–365. [Google Scholar] [CrossRef]
- Wang, Z.; Qin, Y.; Hu, C.; Dong, M.; Li, F. Fuzzy Observer-Based Prescribed Performance Control of Vehicle Roll Behavior via Controllable Damper. IEEE Access 2019, 7, 19471–19487. [Google Scholar] [CrossRef]
- Liu, P.; Ning, D.; Luo, L.; Zhang, N.; Du, H. An Electromagnetic Variable Inertance and Damping Seat Suspension with Controllable Circuits. IEEE Trans. Ind. Electron. 2022, 69, 2811–2821. [Google Scholar] [CrossRef]
- Huang, Y.; Na, J.; Wu, X.; Gao, G. Approximation-Free Control for Vehicle Active Suspensions with Hydraulic Actuator. IEEE Trans. Ind. Electron. 2018, 65, 7258–7267. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems with Prescribed Performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- ISO 2631-1; Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole-Body Vibration—Part 1: General Requirements. ISO: London, UK, 1997.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| Symbol | Value |
|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Liu, P.; Leng, D.; Zhan, H.; Luan, G.; Ning, D.; Yu, J. Prescribed Performance Control-Based Semi-Active Vibration Controller for Seat Suspension Equipped with an Electromagnetic Damper. Vibration 2023, 6, 303-318. https://doi.org/10.3390/vibration6010019
Zhao J, Liu P, Leng D, Zhan H, Luan G, Ning D, Yu J. Prescribed Performance Control-Based Semi-Active Vibration Controller for Seat Suspension Equipped with an Electromagnetic Damper. Vibration. 2023; 6(1):303-318. https://doi.org/10.3390/vibration6010019
Chicago/Turabian StyleZhao, Junjie, Pengfei Liu, Dingxin Leng, Haoyu Zhan, Guangrui Luan, Donghong Ning, and Jianqiang Yu. 2023. "Prescribed Performance Control-Based Semi-Active Vibration Controller for Seat Suspension Equipped with an Electromagnetic Damper" Vibration 6, no. 1: 303-318. https://doi.org/10.3390/vibration6010019