

Free and Forced Vibration Behaviors of Magnetodielectric Effect in Magnetorheological Elastomers


Abstract
:1. Introduction
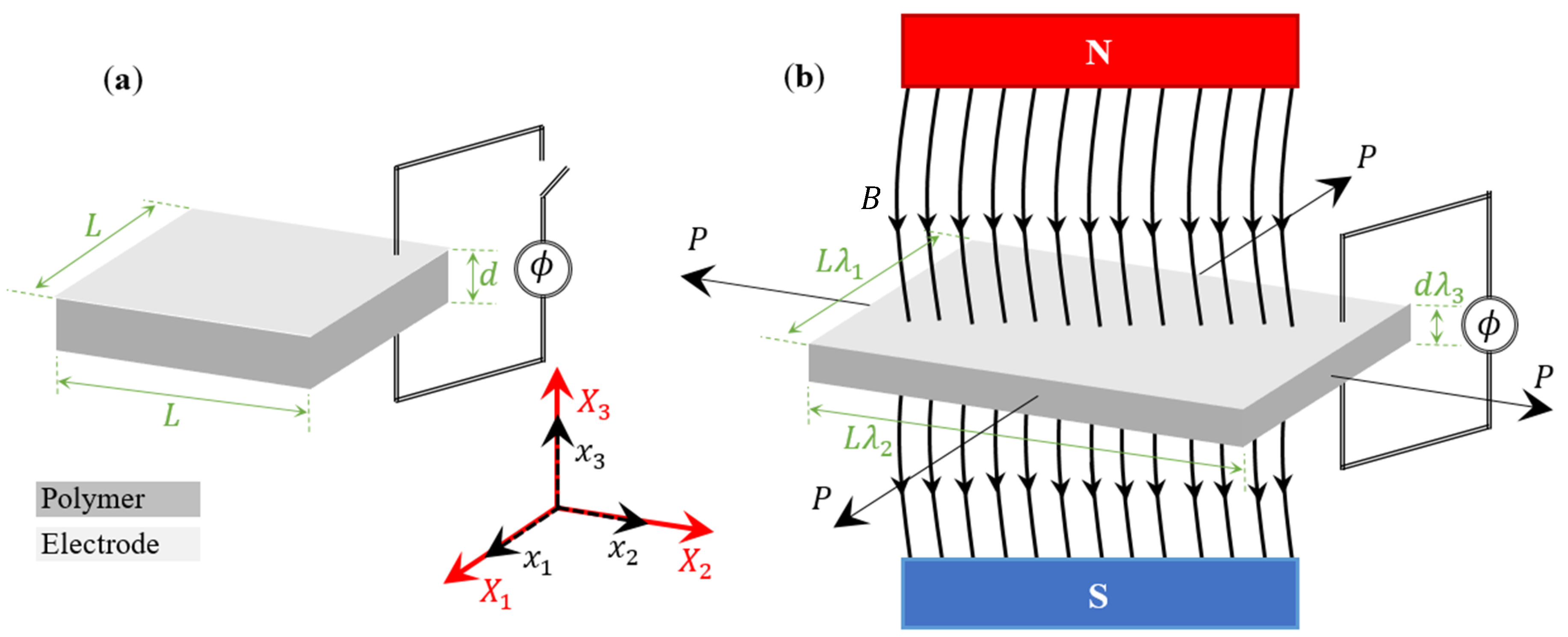
2. Mathematical Formulation
- The polymeric membrane is assumed to be incompressible, e.g., the volume of the reference and actuated model are equal.
- The deformation of the membrane is specified in terms of the stretch .
- It is assumed that the thickness of the membrane is thin (the inertia in the out-of-plane direction () is negligible); thus, only the in-plane deformation is analyzed.
- Linear viscoelasticity is assumed using the Kelvin–Voigt model.
3. Results and Discussion
3.1. Equilibrium Points and Initial Stretch
3.2. Static Instability
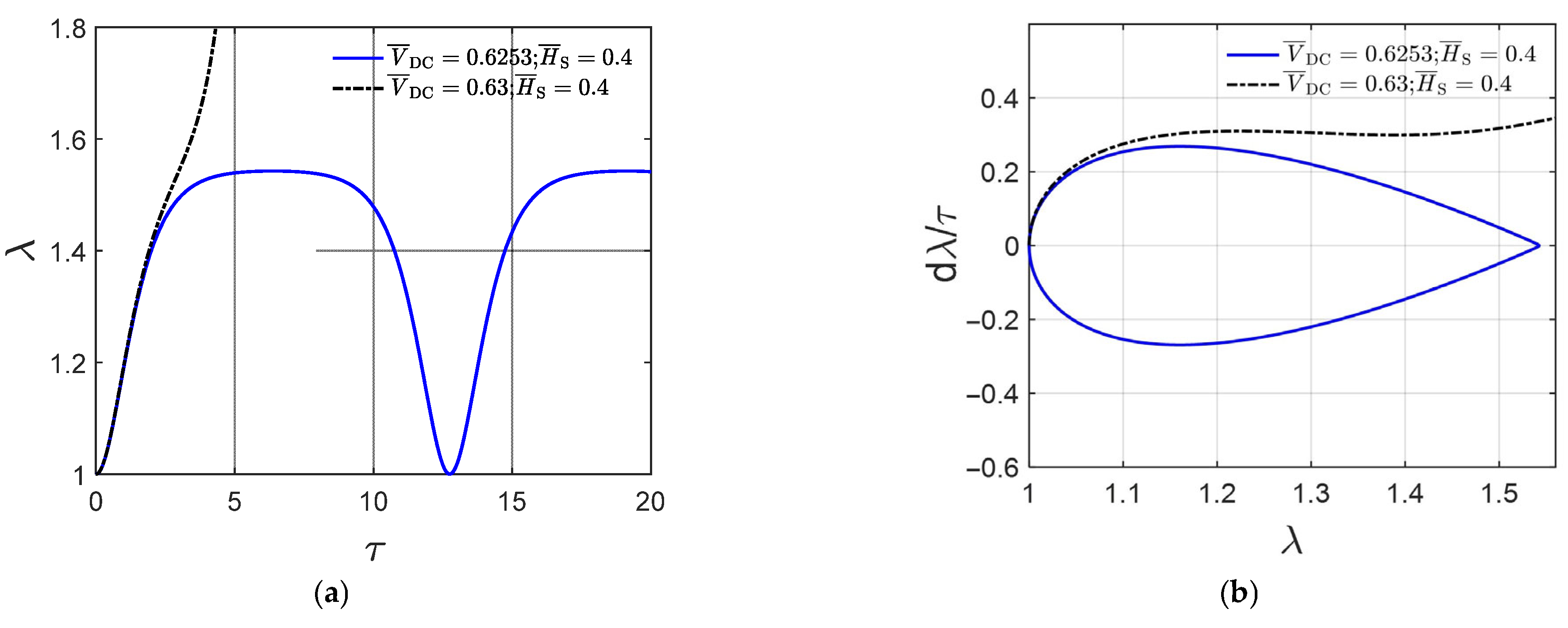
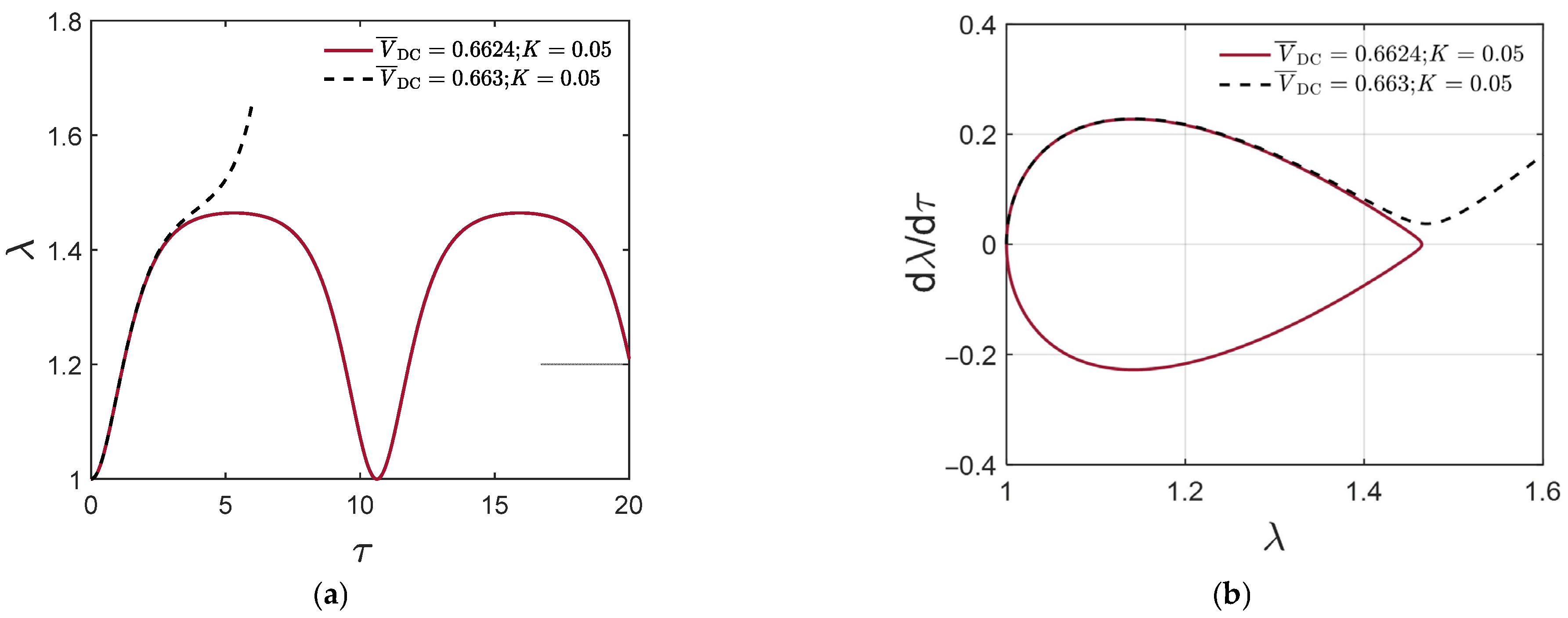
3.3. DC Dynamic Instability
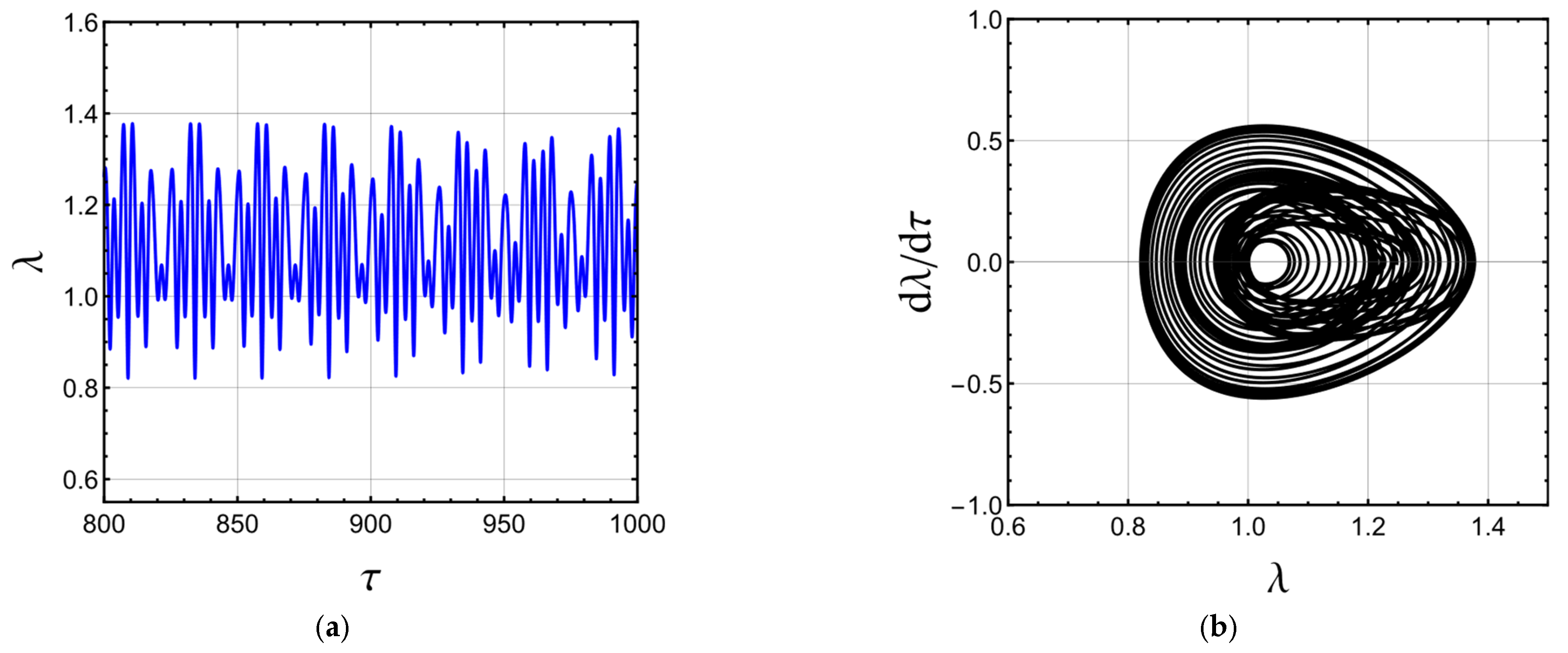
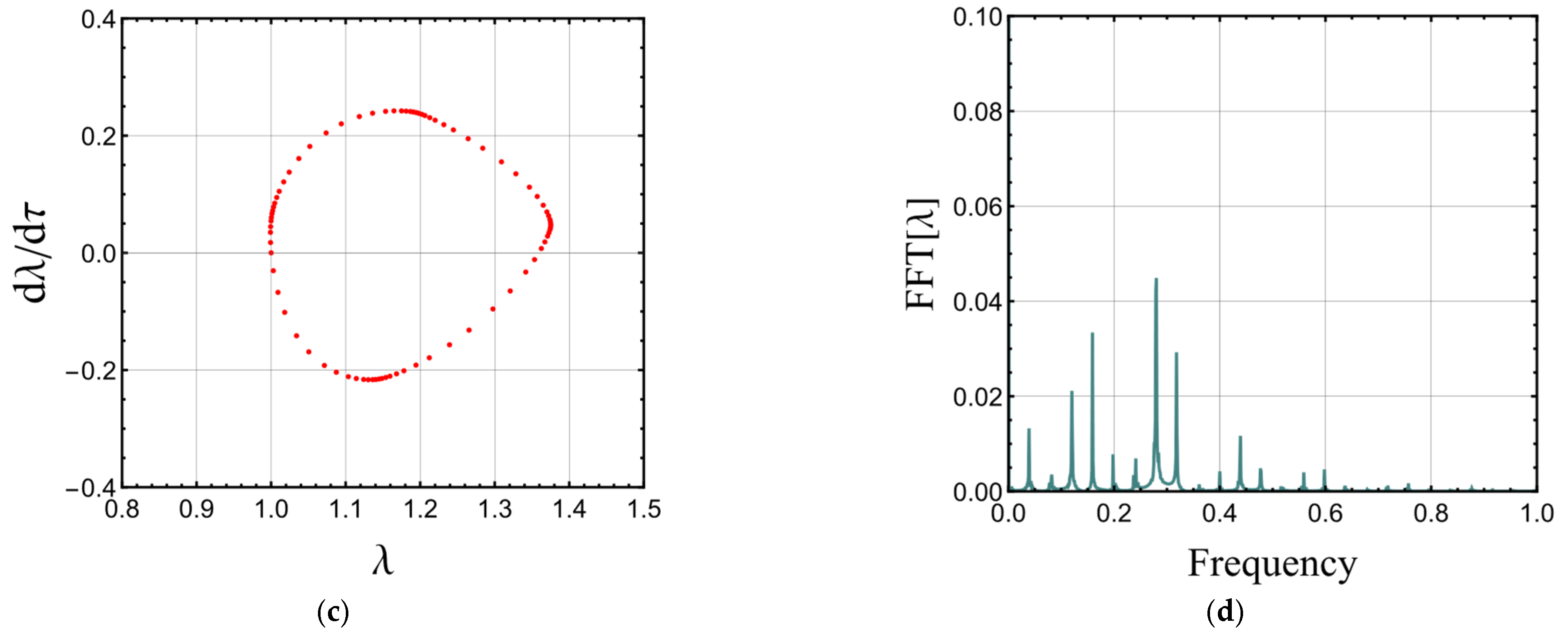
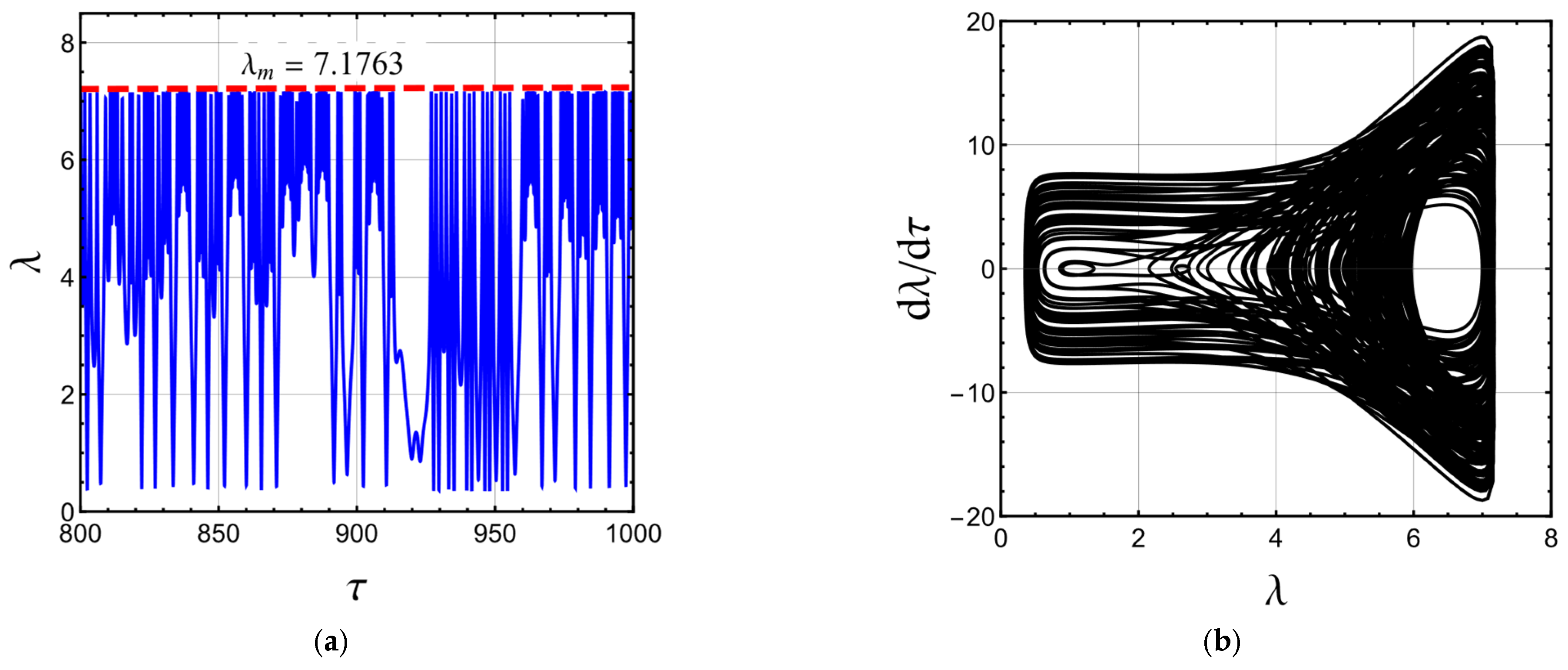
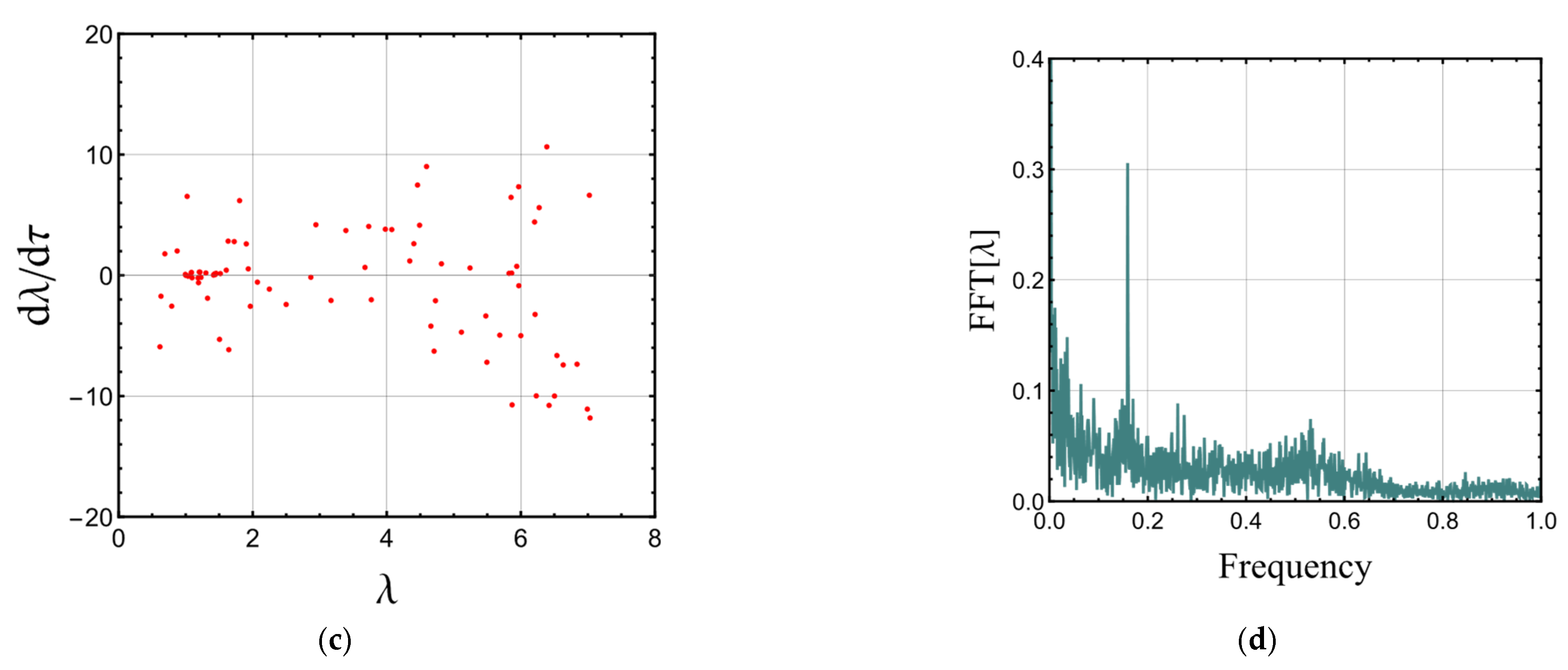
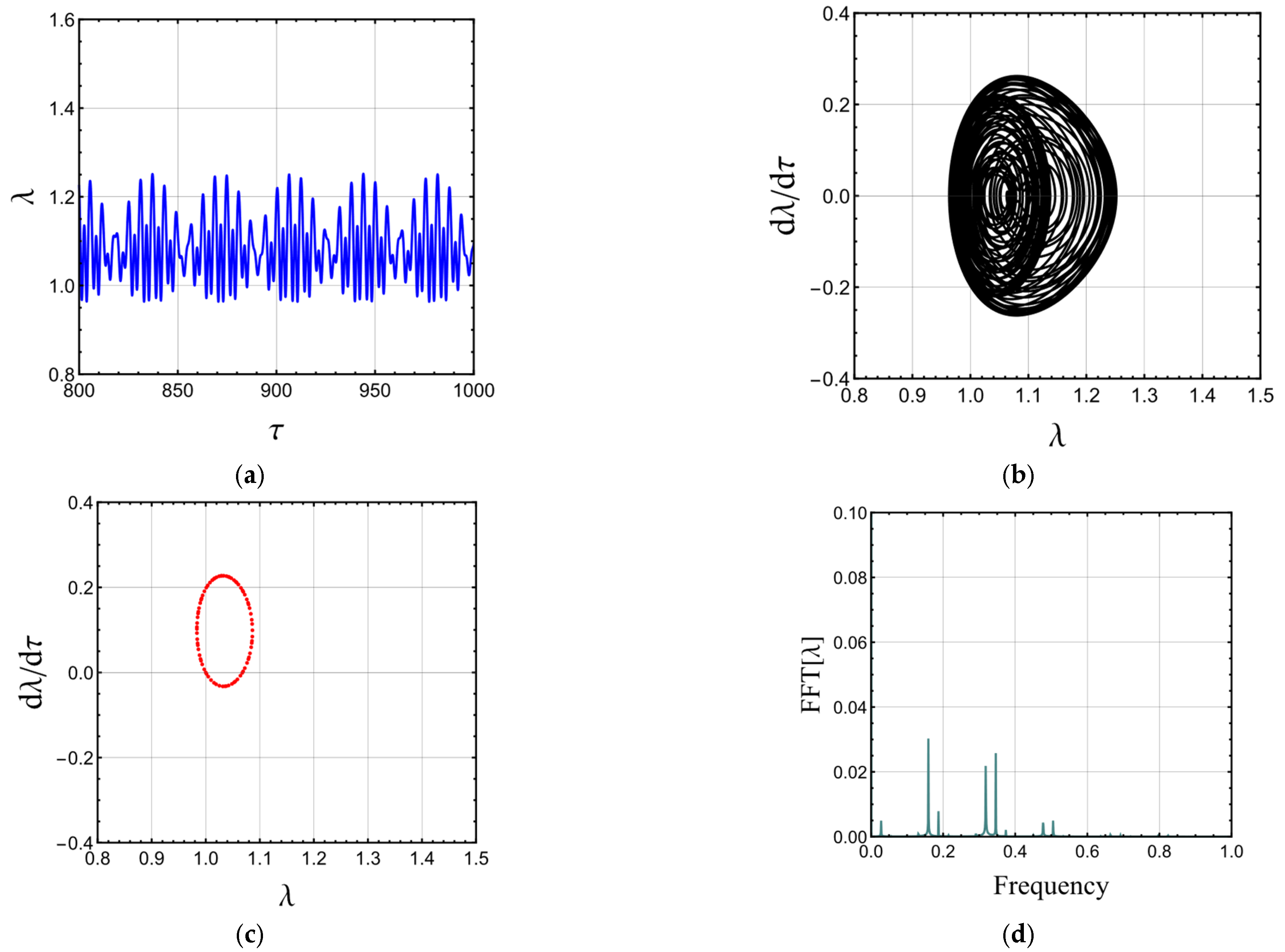
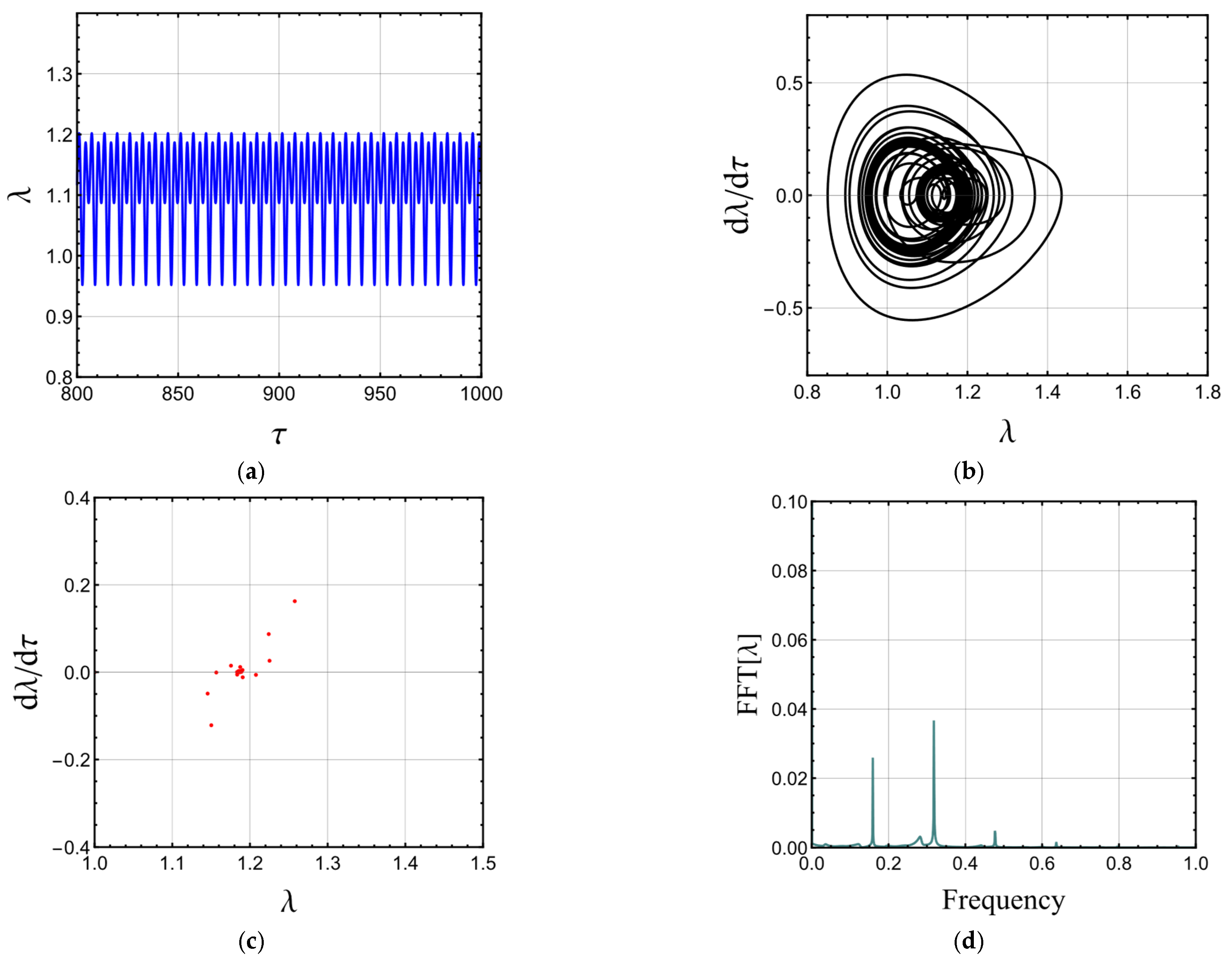
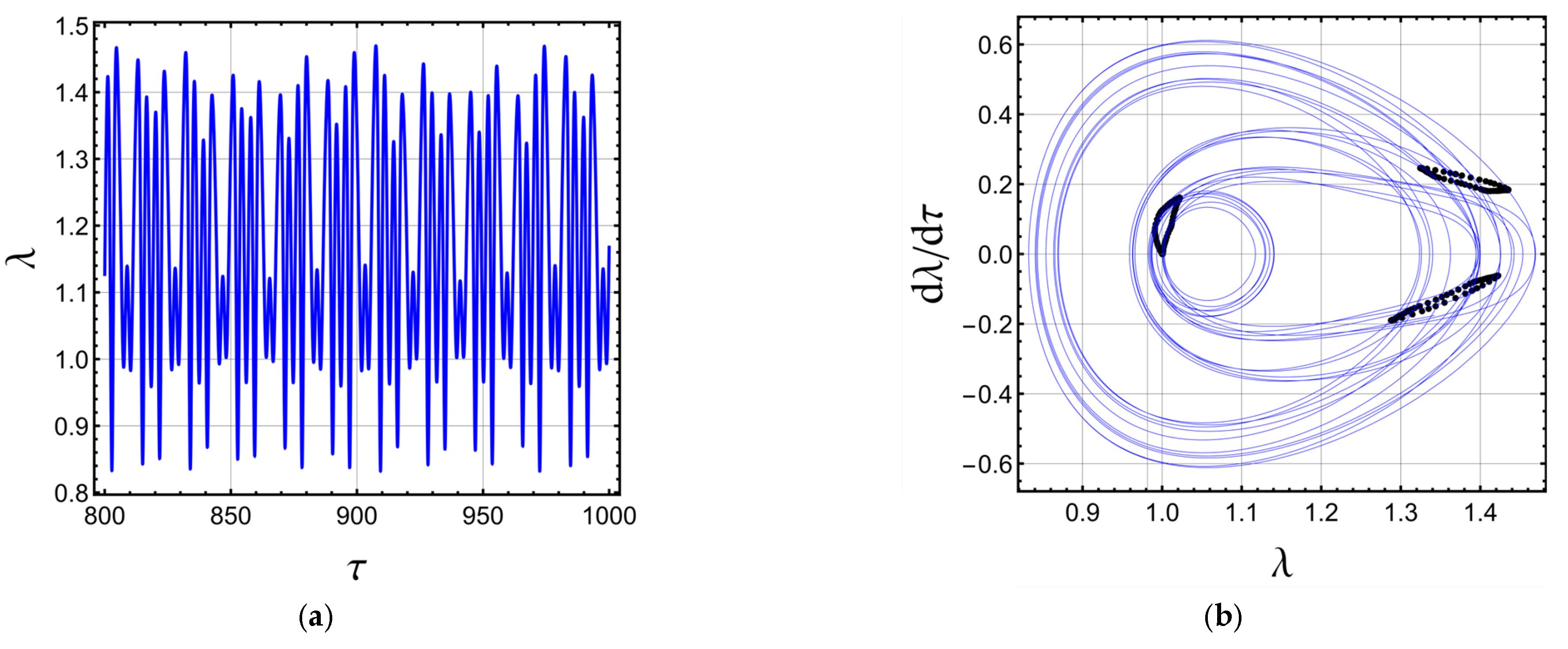
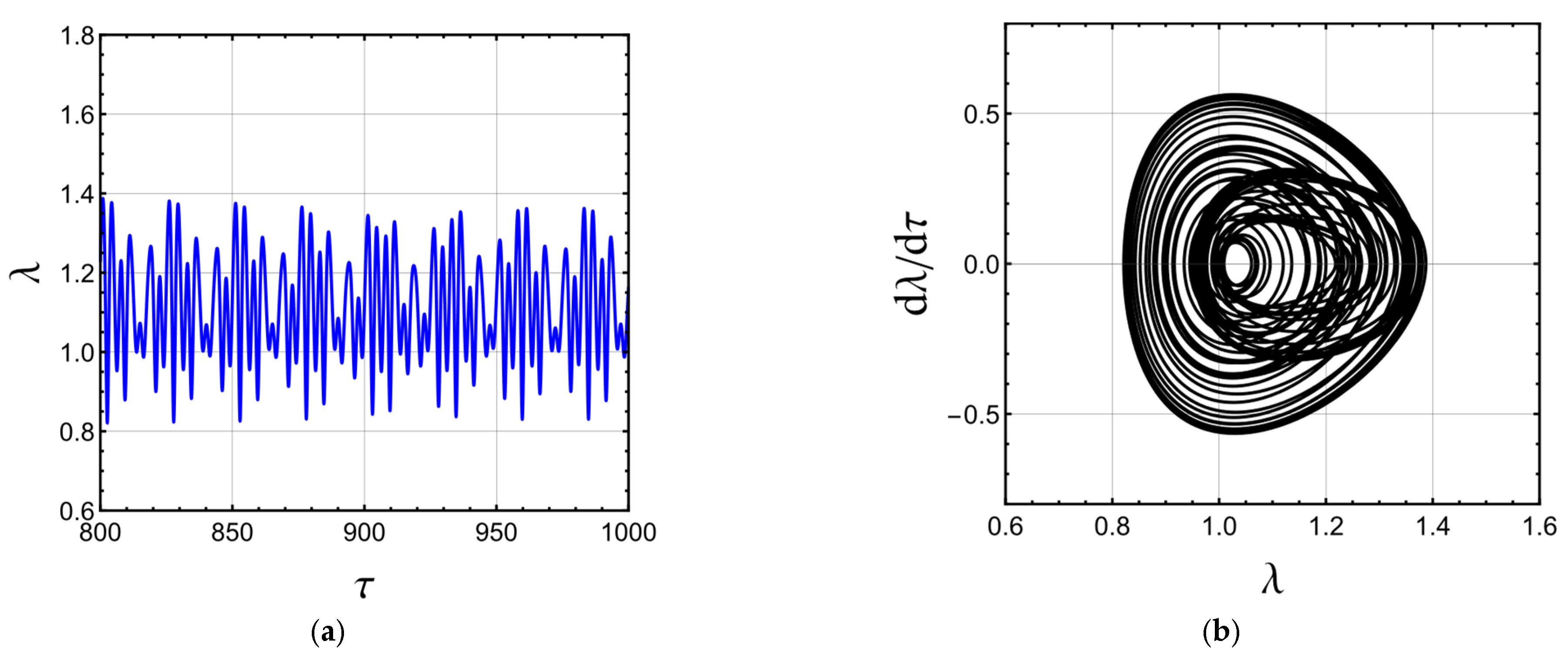
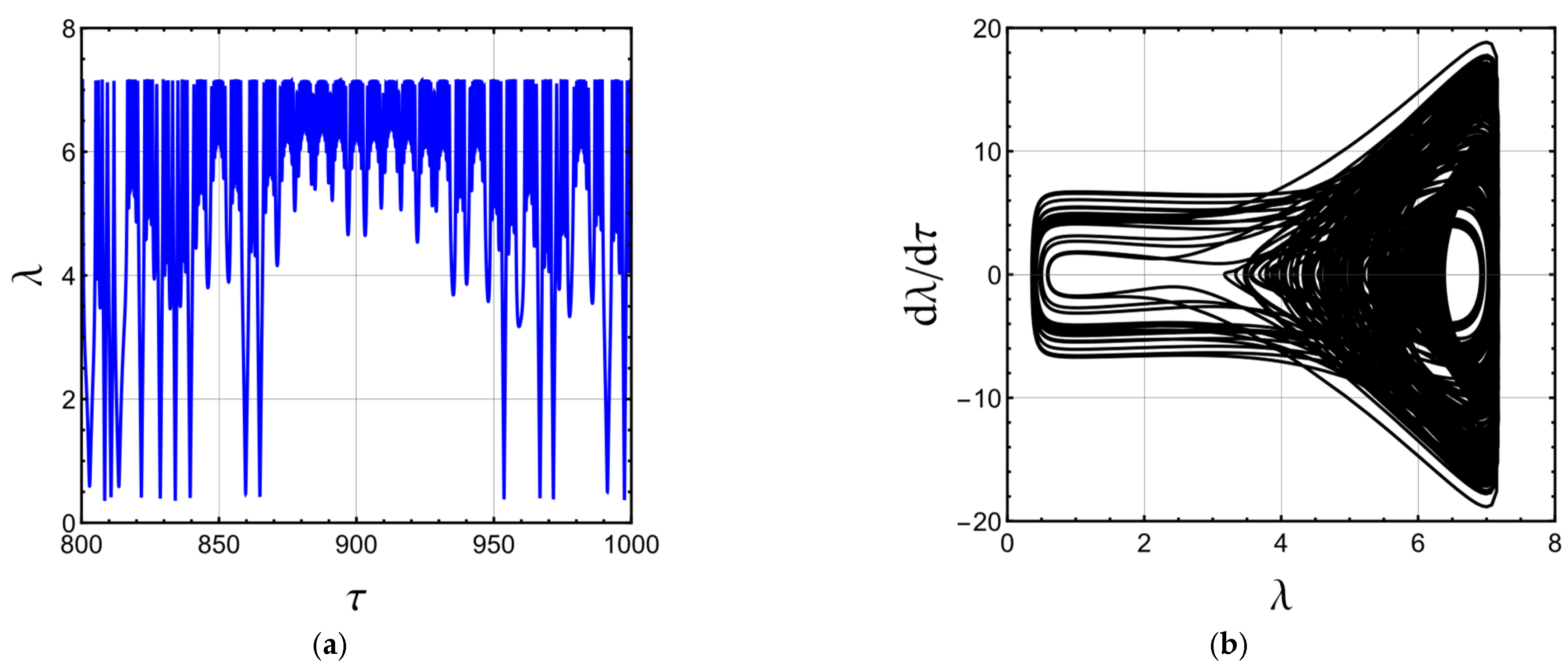
3.4. Dynamics under Time-Varying External Load
4. Conclusions
- The magneto-electro-active polymer may undergo quasiperiodic and chaotic motions.
- Increasing the static magnetic field leads to chaos when the electric field is time-dependent.
- The second invariant can suppress the influence of the static magnetic field.
- The damping force can also overcome chaotic motion due to the increased static magnetic field.
- Chaotic motion due to the increased static magnetic field can be suppressed by increasing the strain stiffening effect (decreasing the Gent parameter-limiting stretch).
- With the inclusion of the static magnetic field, a smaller amount of static voltage is required for the onset of static and DC dynamic instabilities.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, K.J.; Tadokoro, S. Electroactive Polymers for Robotic Applications: Artificial Muscles and Sensors; Springer: London, UK, 2007. [Google Scholar]
- Suo, Z. Theory of Dielectric Elastomers. Acta Mech. Solida Sin. 2010, 23, 549–578. [Google Scholar] [CrossRef]
- Yu, K.; Xin, A.; Wang, Q. Mechanics of Light-Activated Self-Healing Polymer Networks. J. Mech. Phys. Solids 2019, 124, 643–662. [Google Scholar] [CrossRef]
- Alibakhshi, A.; Heidari, H. Nonlinear Resonance Analysis of Dielectric Elastomer Actuators under Thermal and Isothermal Conditions. Int. J. Appl. Mech. 2020, 12, 2050100. [Google Scholar] [CrossRef]
- Hamid Jafari, R.S. Analysis of an Adaptive Periodic Low-Frequency Wave Filter Featuring Magnetorheological Elastomers. Polymers 2023, 15, 735. [Google Scholar] [CrossRef]
- Jafari, H.; Ghodsi, A.; Azizi, S.; Ghazavi, M.R. Energy Harvesting Based on Magnetostriction, for Low-Frequency Excitations. Energy 2017, 124, 1–8. [Google Scholar] [CrossRef]
- Zuo, Y.; Ding, Y.; Zhang, J.; Zhu, M.; Liu, L.; Zhao, J. Humidity Effect on Dynamic Electromechanical Properties of Polyacrylic Dielectric Elastomer: An Experimental Study. Polymers 2021, 13, 784. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-Scale Soft-Bodied Robot with Multimodal Locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Jafari, H.; Ghodsi, A.; Ghazavi, M.R.; Azizi, S. Novel Mass Detection Based on Magnetic Excitation in Anti-Resonance Region. Microsyst. Technol. 2016, 23, 4–10. [Google Scholar] [CrossRef]
- Isaev, D.; Semisalova, A.; Alekhina, Y.; Makarova, L.; Perov, N. Simulation of Magnetodielectric Effect in Magnetorheological Elastomers. Int. J. Mol. Sci. 2019, 20, 1457. [Google Scholar] [CrossRef] [Green Version]
- Semisalova, A.S.; Perov, N.S.; Stepanov, G.V.; Kramarenko, E.Y.; Khokhlov, A.R. Strong Magnetodielectric Effects in Magnetorheological Elastomers. Soft Matter 2013, 9, 11318–11324. [Google Scholar] [CrossRef]
- Martins, P.; Silva, D.; Silva, M.P.; Lanceros-Mendez, S. Improved Magnetodielectric Coefficient on Polymer Based Composites through Enhanced Indirect Magnetoelectric Coupling. Appl. Phys. Lett. 2016, 109, 112905. [Google Scholar] [CrossRef] [Green Version]
- Morales, C.; Dewdney, J.; Pal, S.; Skidmore, S.; Stojak, K.; Srikanth, H.; Weller, T.; Wang, J. Tunable Magneto-Dielectric Polymer Nanocomposites for Microwave Applications. IEEE Trans. Microw. Theory Tech. 2011, 59, 302–310. [Google Scholar] [CrossRef]
- Yang, T.I.; Brown, R.N.C.; Kempel, L.C.; Kofinas, P. Surfactant-Modified Nickel Zinc Iron Oxide/Polymer Nanocomposites for Radio Frequency Applications. J. Nanoparticle Res. 2010, 12, 2967–2978. [Google Scholar] [CrossRef]
- Castro, J.; Morales, C.; Weller, T.; Wang, J.; Srikanth, H. Synthesis and Characterization of Low-Loss Fe3O4-PDMS Magneto-Dielectric Polymer Nanocomposites for RF Applications. In Proceedings of the WAMICON 2014, Tampa, FL, USA, 6 June 2014; pp. 1–5. [Google Scholar]
- Mitra, S.; Mondal, O.; Saha, D.R.; Datta, A.; Banerjee, S.; Chakravorty, D. Magnetodielectric Effect in Graphene-PVA Nanocomposites. J. Phys. Chem. C 2011, 115, 14285–14289. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.I.; Brown, R.N.C.; Kempel, L.C.; Kofinas, P. Magneto-Dielectric Properties of Polymer- Fe3O4 Nanocomposites. J. Magn. Magn. Mater. 2008, 320, 2714–2720. [Google Scholar] [CrossRef]
- O’Halloran, A.; O’Malley, F.; McHugh, P. A Review on Dielectric Elastomer Actuators, Technology, Applications, and Challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Lu, T.; Ma, C.; Wang, T. Mechanics of Dielectric Elastomer Structures: A Review. Extrem. Mech. Lett. 2020, 38, 100752. [Google Scholar] [CrossRef]
- Zhu, J.; Cai, S.; Suo, Z. Nonlinear Oscillation of a Dielectric Elastomer Balloon. Polym. Int. 2010, 59, 378–383. [Google Scholar] [CrossRef]
- Sheng, J.; Chen, H.; Li, B.; Wang, Y. Nonlinear Dynamic Characteristics of a Dielectric Elastomer Membrane Undergoing In-Plane Deformation. Smart Mater. Struct. 2014, 23, 045010. [Google Scholar] [CrossRef]
- Wang, F.; Lu, T.; Wang, T.J. Nonlinear Vibration of Dielectric Elastomer Incorporating Strain Stiffening. Int. J. Solids Struct. 2016, 87, 70–80. [Google Scholar] [CrossRef]
- Alibakhshi, A.; Dastjerdi, S.; Akgöz, B.; Civalek, Ö. Parametric Vibration of a Dielectric Elastomer Microbeam Resonator Based on a Hyperelastic Cosserat Continuum Model. Compos. Struct. 2022, 287, 115386. [Google Scholar] [CrossRef]
- Alibakhshi, A.; Heidari, H. Nonlinear Dynamic Responses of Electrically Actuated Dielectric Elastomer-Based Microbeam Resonators. J. Intell. Mater. Syst. Struct. 2021, 33, 558–571. [Google Scholar] [CrossRef]
- Allahyari, E.; Asgari, M. Nonlinear Dynamic Analysis of Anisotropic Fiber-Reinforced Dielectric Elastomers: A Mathematical Approach. J. Intell. Mater. Syst. Struct. 2021, 32, 2300–2324. [Google Scholar] [CrossRef]
- Allahyari, E.; Asgari, M. Effect of Fibers Configuration on Nonlinear Vibration of Anisotropic Dielectric Elastomer Membrane. Int. J. Appl. Mech. 2020, 12, 2050114. [Google Scholar] [CrossRef]
- Alibakhshi, A.; Jafari, H.; Rostam-alilou, A.; Bodaghi, M.; Sedaghati, R. Nonlinear Vibration Behaviors of Dielectric Elastomer Membranes under Multi-Frequency Excitations. Sens. Actuators A. Phys. 2023, 351, 114171. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Stepanov, G.V.; Sorokin, V.V.; Stadler, D.; Shamonin, M. Transient Magnetorheological Response of Magnetoactive Elastomers to Step and Pyramid Excitations. Soft Matter 2016, 12, 2901–2913. [Google Scholar] [CrossRef]
- Borin, D.Y.; Stepanov, G. V Elastomer with Magneto-and Electrorheological Properties. J. Intell. Mater. Syst. Struct. 2015, 26, 1893–1898. [Google Scholar] [CrossRef] [Green Version]
- Pelteret, J.P.; Steinmann, P. Magneto-Active Polymers: Fabrication, Characterisation, Modelling and Simulation at the Micro- and Macro-Scale; De Gruyter: Berlin, Germany, 2020; pp. 1–379. [Google Scholar] [CrossRef]
- Ghodsi, A.; Jafari, H.; Azizi, S.; Ghazavi, M.R. On the Dynamics of a Novel Energy Harvester to Convert the Energy of the Magnetic Noise into Electrical Power. Energy 2020, 207, 118268. [Google Scholar] [CrossRef]
- Jafari, H.; Sedaghati, R. Optimization of Band Gap Area in the Low-Frequency In-Plane Elastic/Acoustic Passive Adaptive Metamaterial. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 2123. [Google Scholar]
- Yarali, E.; Baniasadi, M.; Zolfagharian, A.; Chavoshi, M.; Arefi, F.; Hossain, M.; Bastola, A.; Ansari, M.; Foyouzat, A.; Dabbagh, A.; et al. Magneto-/Electro-responsive Polymers toward Manufacturing, Characterization, and Biomedical/Soft Robotic Applications. Appl. Mater. Today 2022, 26, 101306. [Google Scholar] [CrossRef]
- Abdalaziz, M.; Vatandoost, H.; Sedaghati, R.; Rakheja, S. Development and Experimental Characterization of a Large-Capacity Magnetorheological Damper with Annular-Radial Gap. Smart Mater. Struct. 2022, 31, 115021. [Google Scholar] [CrossRef]
- Montgomery, S.M.; Wu, S.; Kuang, X.; Armstrong, C.D.; Zemelka, C.; Ze, Q.; Zhang, R.; Zhao, R.; Qi, H.J. Magneto-Mechanical Metamaterials with Widely Tunable Mechanical Properties and Acoustic Bandgaps. Adv. Funct. Mater. 2021, 31, 1–10. [Google Scholar] [CrossRef]
- Kafle, A.; Luis, E.; Silwal, R.; Pan, H.M.; Shrestha, P.L.; Bastola, A.K. 3d/4d Printing of Polymers: Fused Deposition Modelling (Fdm), Selective Laser Sintering (Sls), and Stereolithography (Sla). Polymers 2021, 13, 3101. [Google Scholar] [CrossRef]
- Dorfmann, A.; Ogden, R.W. Nonlinear Magnetoelastic Deformations of Elastomers. Acta Mech. 2004, 167, 13–28. [Google Scholar] [CrossRef]
- Garcia-Gonzalez, D. Magneto-Visco-Hyperelasticity for Hard-Magnetic Soft Materials: Theory and Numerical Applications. Smart Mater. Struct. 2019, 28, 085020. [Google Scholar] [CrossRef]
- Zhao, R.; Kim, Y.; Chester, S.A.; Sharma, P.; Zhao, X. Mechanics of Hard-Magnetic Soft Materials. J. Mech. Phys. Solids 2019, 124, 244–263. [Google Scholar] [CrossRef]
- Khurana, A.; Kumar, D.; Sharma, A.K.; Joglekar, M.M. Static and Dynamic Instability Modeling of Electro-Magneto-Active Polymers with Various Entanglements and Crosslinks. Int. J. Non-Linear Mech. 2021, 139, 103865. [Google Scholar] [CrossRef]
- Haldar, K.; Kiefer, B.; Menzel, A. Finite Element Simulation of Rate-Dependent Magneto-Active Polymer Response. Smart Mater. Struct. 2016, 25, 104003. [Google Scholar] [CrossRef]
- Khurana, A.; Kumar, D.; Sharma, A.K.; Joglekar, M.M. Nonlinear Oscillations of Particle-Reinforced Electro-Magneto-Viscoelastomer Actuators. J. Appl. Mech. Trans. ASME 2021, 88, 1–19. [Google Scholar] [CrossRef]
- Xing, Z.; Yong, H. Dynamic Analysis and Active Control of Hard-Magnetic Soft Materials. Int. J. Smart Nano Mater. 2021, 12, 429–449. [Google Scholar] [CrossRef]
- Pucci, E.; Saccomandi, G. A Note on the Gent Model for Rubber-like Materials. Rubber Chem. Technol. 2002, 75, 839–852. [Google Scholar] [CrossRef]
- Horgan, C.O.; Smayda, M.G. The Importance of the Second Strain Invariant in the Constitutive Modeling of Elastomers and Soft Biomaterials. Mech. Mater. 2012, 51, 43–52. [Google Scholar] [CrossRef]
- Ogden, R.W.; Saccomandi, G.; Sgura, I. Fitting Hyperelastic Models to Experimental Data. Comput. Mech. 2004, 34, 484–502. [Google Scholar] [CrossRef] [Green Version]
- Khurana, A.; Kumar, A.; Raut, S.K.; Sharma, A.K.; Joglekar, M.M. Effect of Viscoelasticity on the Nonlinear Dynamic Behavior of Dielectric Elastomer Minimum Energy Structures. Int. J. Solids Struct. 2021, 208, 141–153. [Google Scholar] [CrossRef]
- Dutzler, A.; Buzzi, C.; Leitner, M. Nondimensional Translational Characteristics of Elastomer Components. J. Appl. Eng. Des. Simul. (JAEDS) 2021, 1, 18–24. [Google Scholar] [CrossRef]
- Lefèvre, V.; Lopez-Pamies, O. Nonlinear Electroelastic Deformations of Dielectric Elastomer Composites: I—Ideal Elastic Dielectrics. J. Mech. Phys. Solids 2017, 99, 409–437. [Google Scholar] [CrossRef] [Green Version]
- Nadzharyan, T.A.; Shamonin, M.; Kramarenko, E.Y. Theoretical Modeling of Magnetoactive Elastomers on Different Scales: A State-of-the-Art Review. Polymers 2022, 14, 4096. [Google Scholar] [CrossRef]
- Sharma, A.K.; Arora, N.; Joglekar, M.M. DC Dynamic Pull-in Instability of a Dielectric Elastomer Balloon: An Energy-Based Approach. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20170900. [Google Scholar] [CrossRef] [Green Version]
- Alibakhshi, A.; Chen, W.; Destrade, M. Nonlinear Vibration and Stability of a Dielectric Elastomer Balloon Based on a Strain-Stiffening Model. J. Elast. 2022, 149, 1–16. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 0 | 100 | 0 | 1.2638 | 0.6893 |
| 0.5 | 0 | 100 | 0 | 1.4379 | 0.5164 |
| 0 | 0.05 | 100 | 0 | 1.2635 | 0.7036 |
| 0 | 0 | 100 | 0.4 | 1.2958 | 0.6730 |
| 0 | 0 | 50 | 0 | 1.2679 | 0.6914 |
| 0 | 0 | 100 | 0 | 1.4743 | 0.6494 |
| 0.5 | 0 | 100 | 0 | 1.7052 | 0.4889 |
| 0 | 0.05 | 100 | 0 | 1.4718 | 0.6624 |
| 0 | 0 | 100 | 0.4 | 1.5447 | 0.6253 |
| 0 | 0 | 50 | 0 | 1.4843 | 0.6521 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jafari, H.; Sedaghati, R. Free and Forced Vibration Behaviors of Magnetodielectric Effect in Magnetorheological Elastomers. Vibration 2023, 6, 269-285. https://doi.org/10.3390/vibration6010017
Jafari H, Sedaghati R. Free and Forced Vibration Behaviors of Magnetodielectric Effect in Magnetorheological Elastomers. Vibration. 2023; 6(1):269-285. https://doi.org/10.3390/vibration6010017
Chicago/Turabian StyleJafari, Hamid, and Ramin Sedaghati. 2023. "Free and Forced Vibration Behaviors of Magnetodielectric Effect in Magnetorheological Elastomers" Vibration 6, no. 1: 269-285. https://doi.org/10.3390/vibration6010017