
Faba Bean (Vicia faba L.) Yield Estimation Based on Dual-Sensor Data
 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
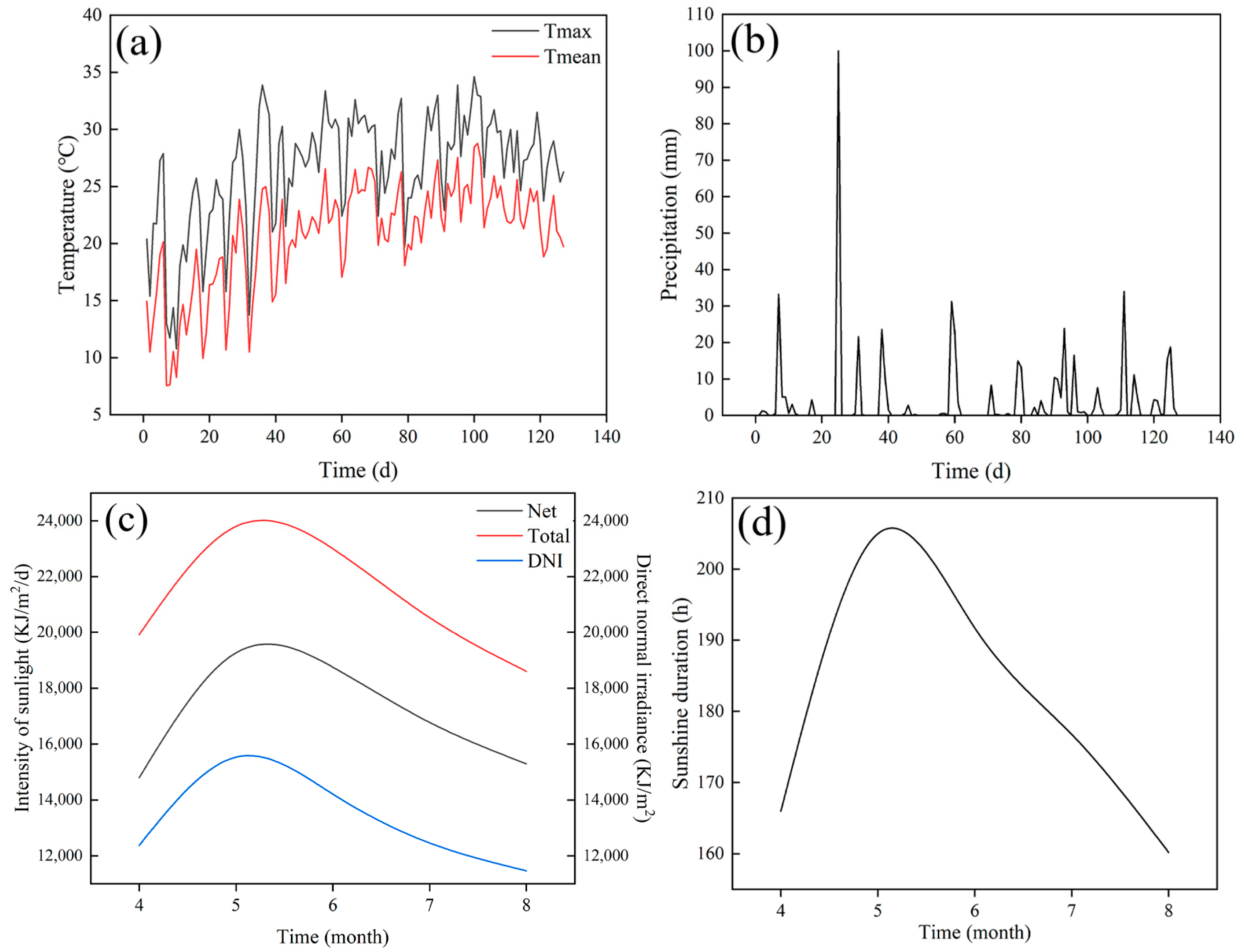
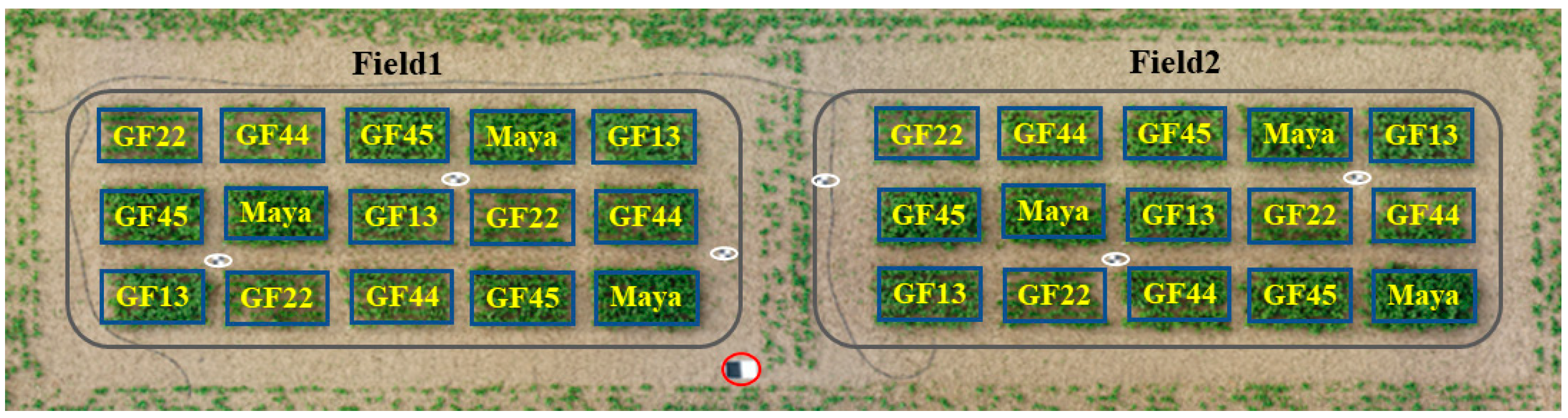
2.1. Test Site
2.2. Data Collection
2.2.1. Collection of Ground Data
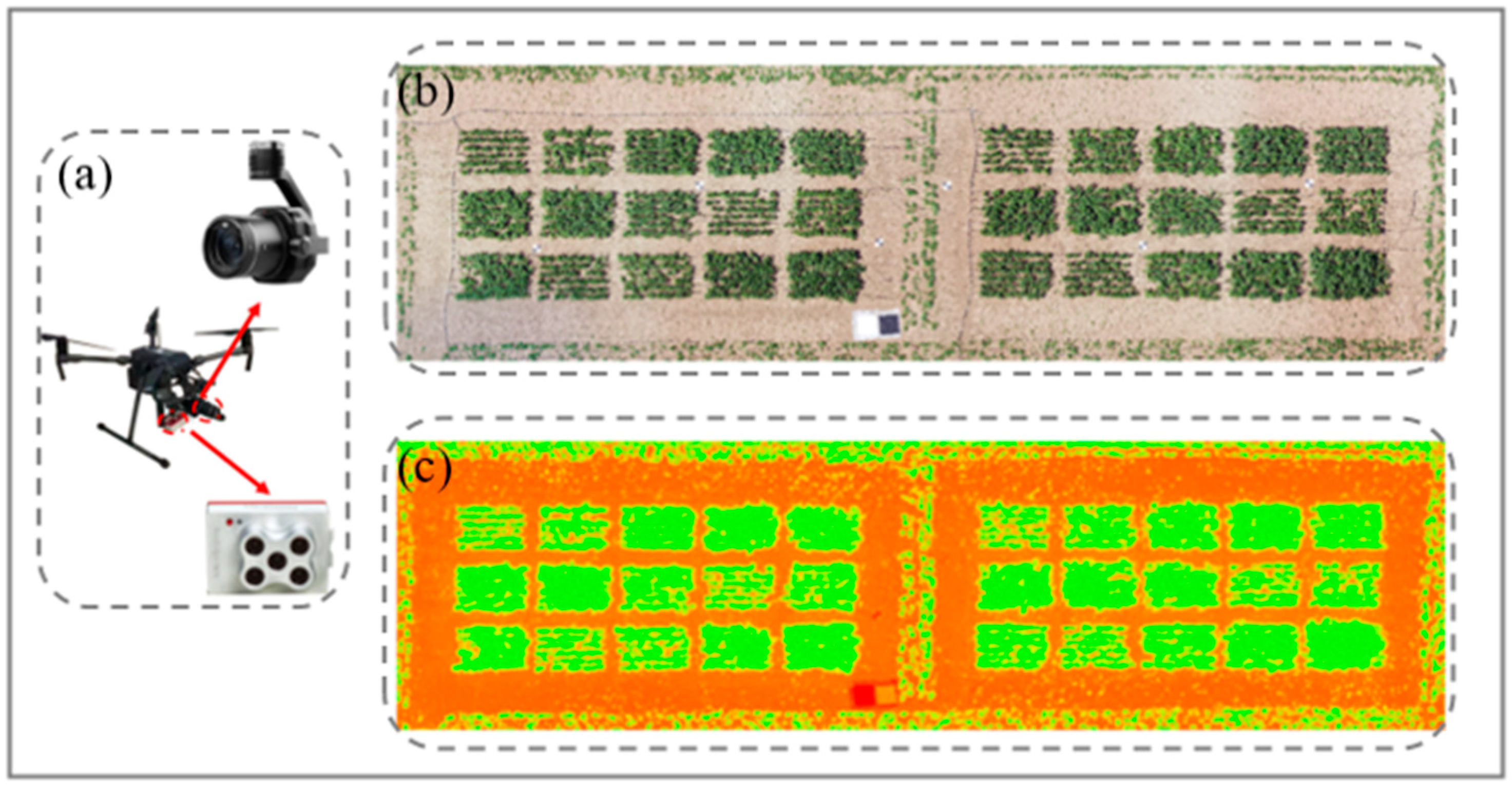
2.2.2. UAV Configuration
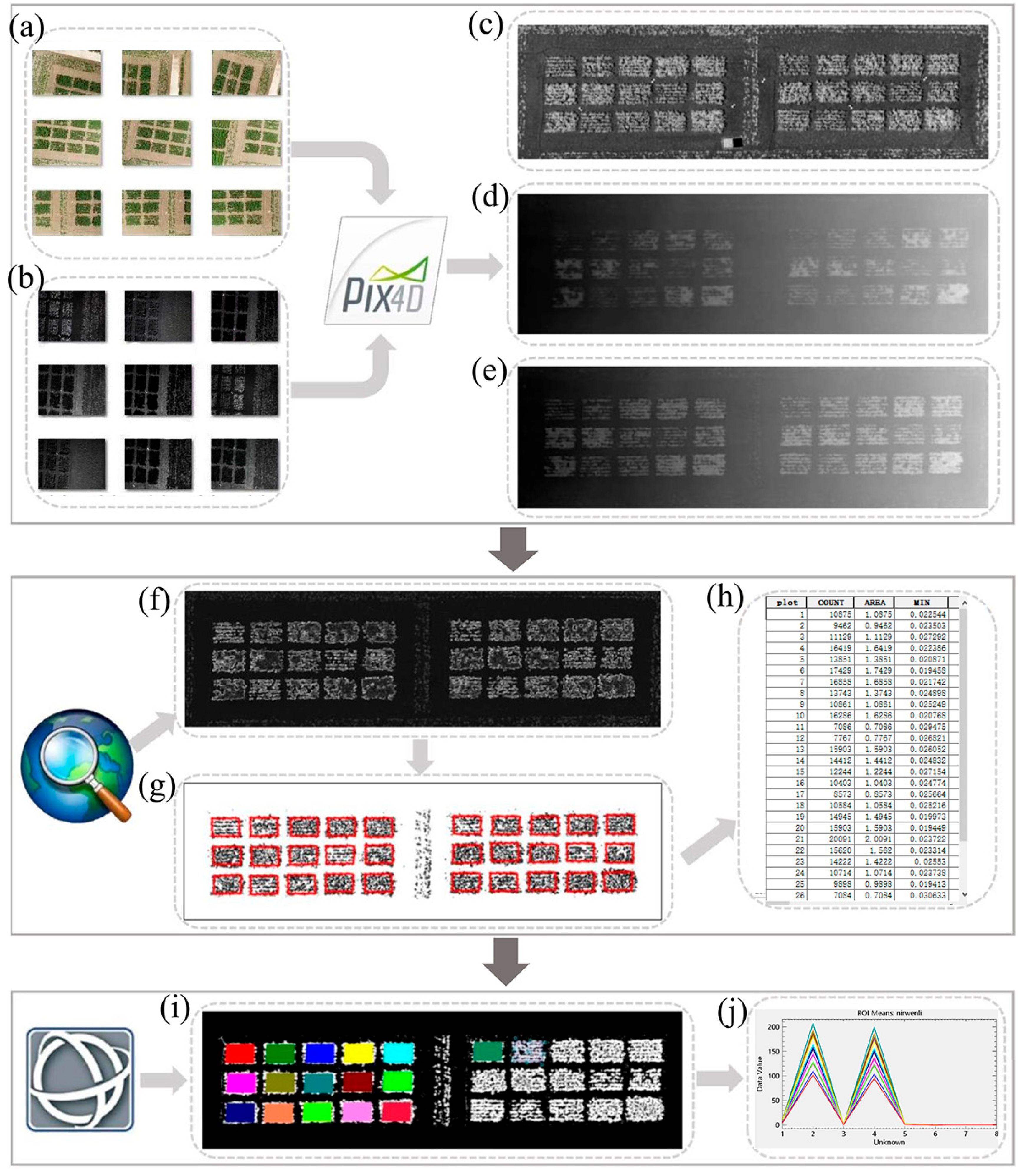
2.2.3. Acquisition and Processing of UAV-Based Data
2.3. Vegetation Indices
2.4. ML Algorithms
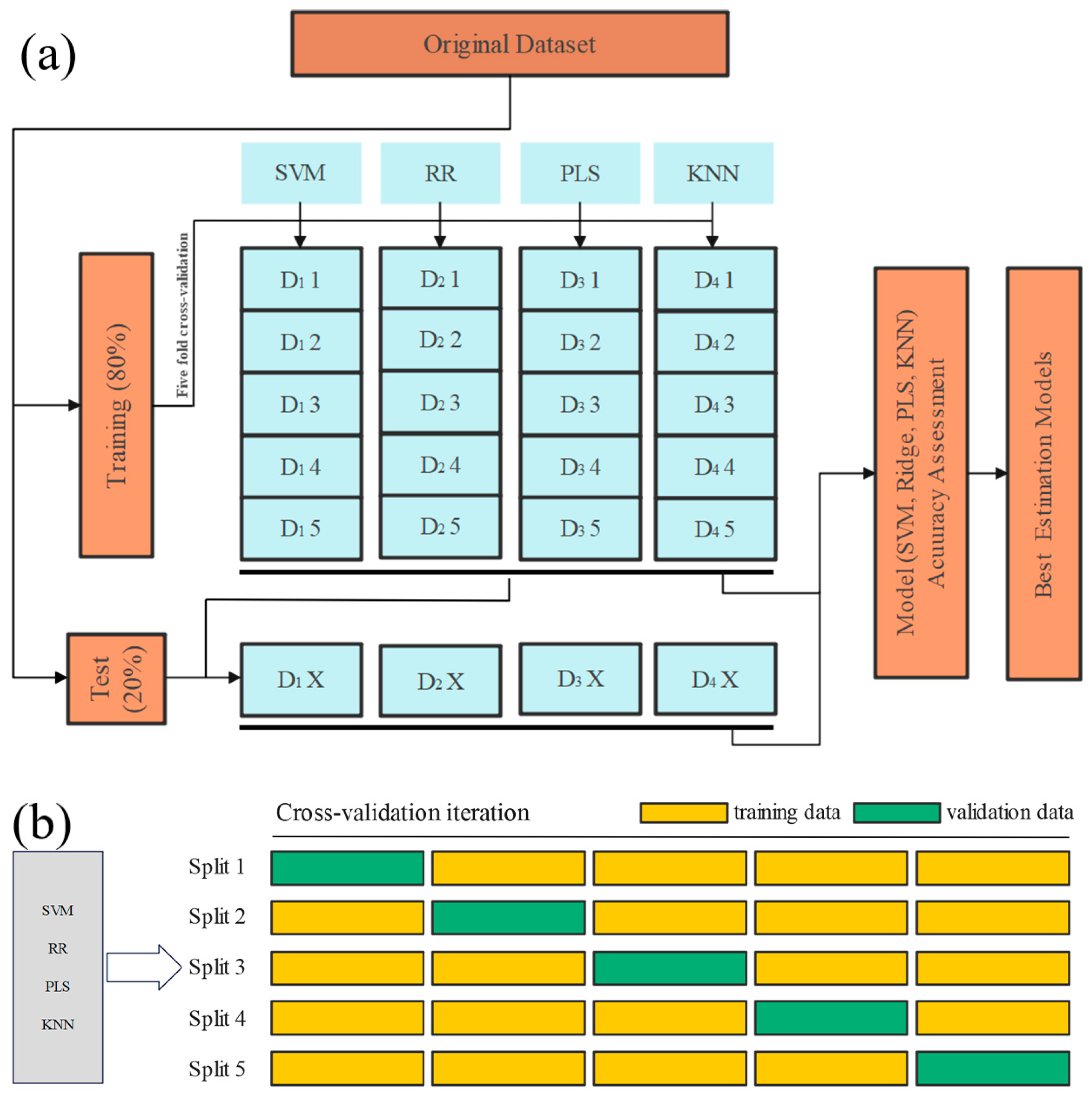
2.5. Model Construction and Evaluation
2.5.1. Model Construction
2.5.2. Model Evaluation
3. Results
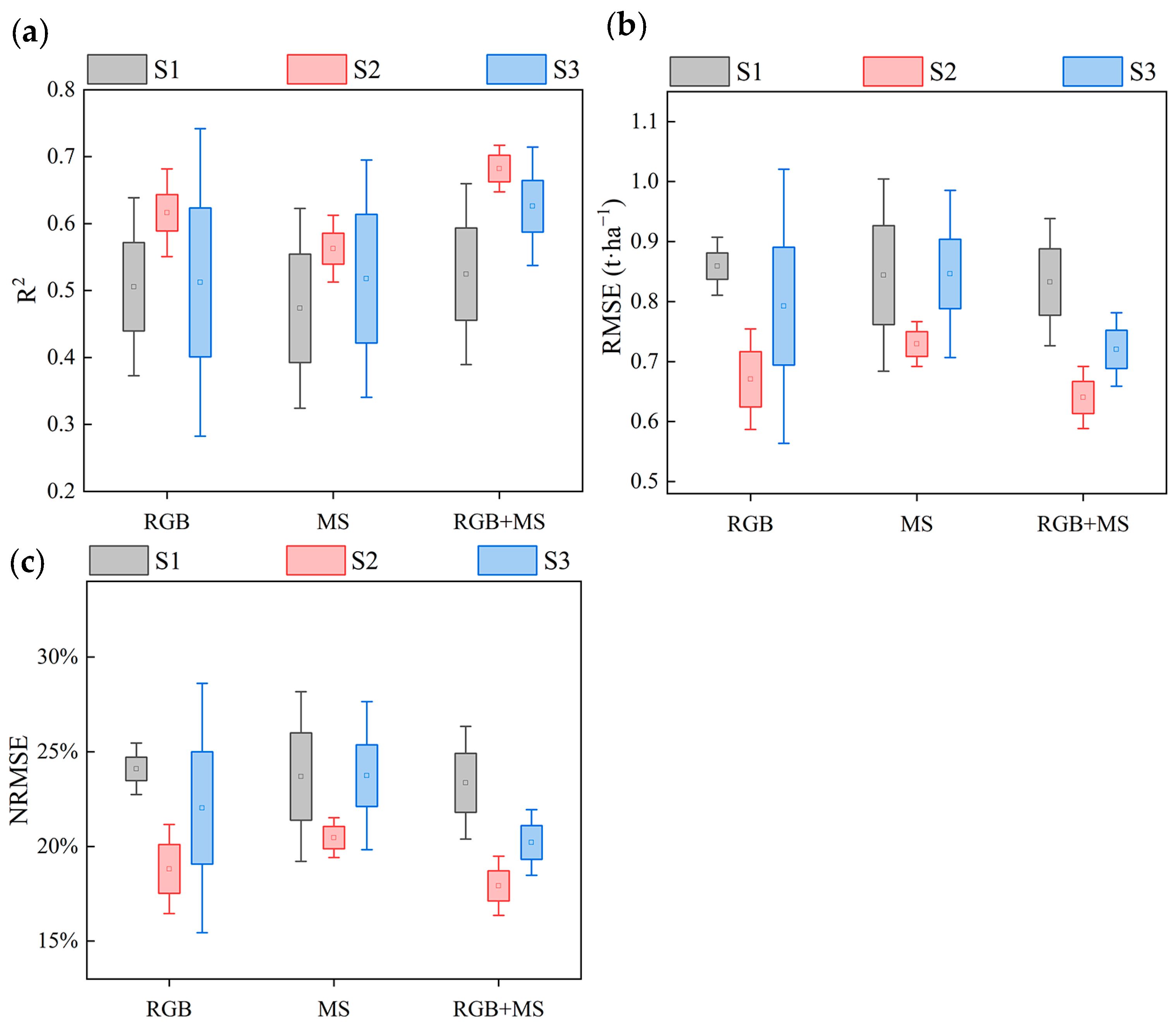
3.1. Faba Bean Yield Estimation for the Optimal Single-Growth Period
3.2. Faba Bean Yield Estimation for Optimal Sensor
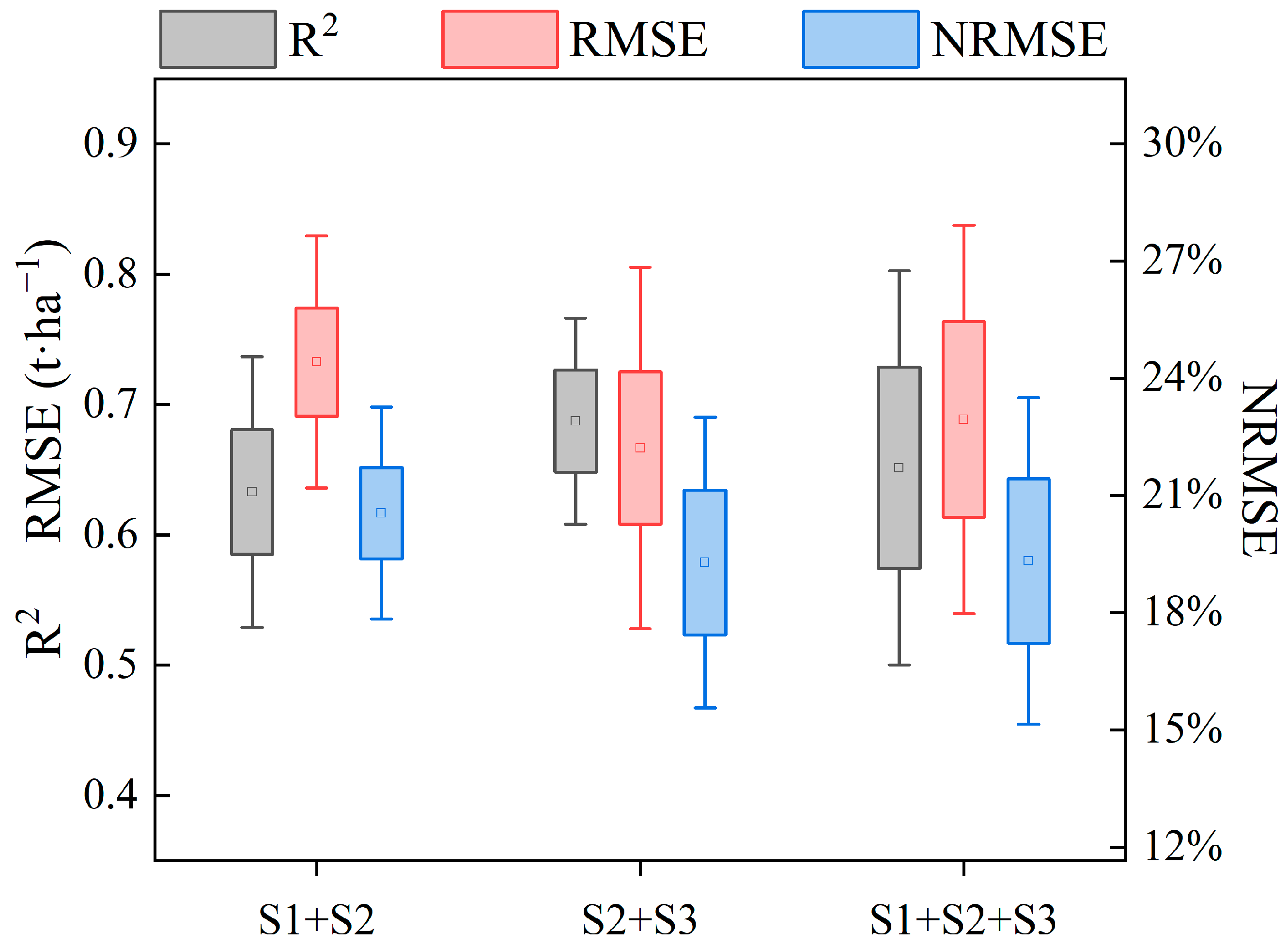
3.3. Faba Bean Yield Estimation for Multiple Growth Periods
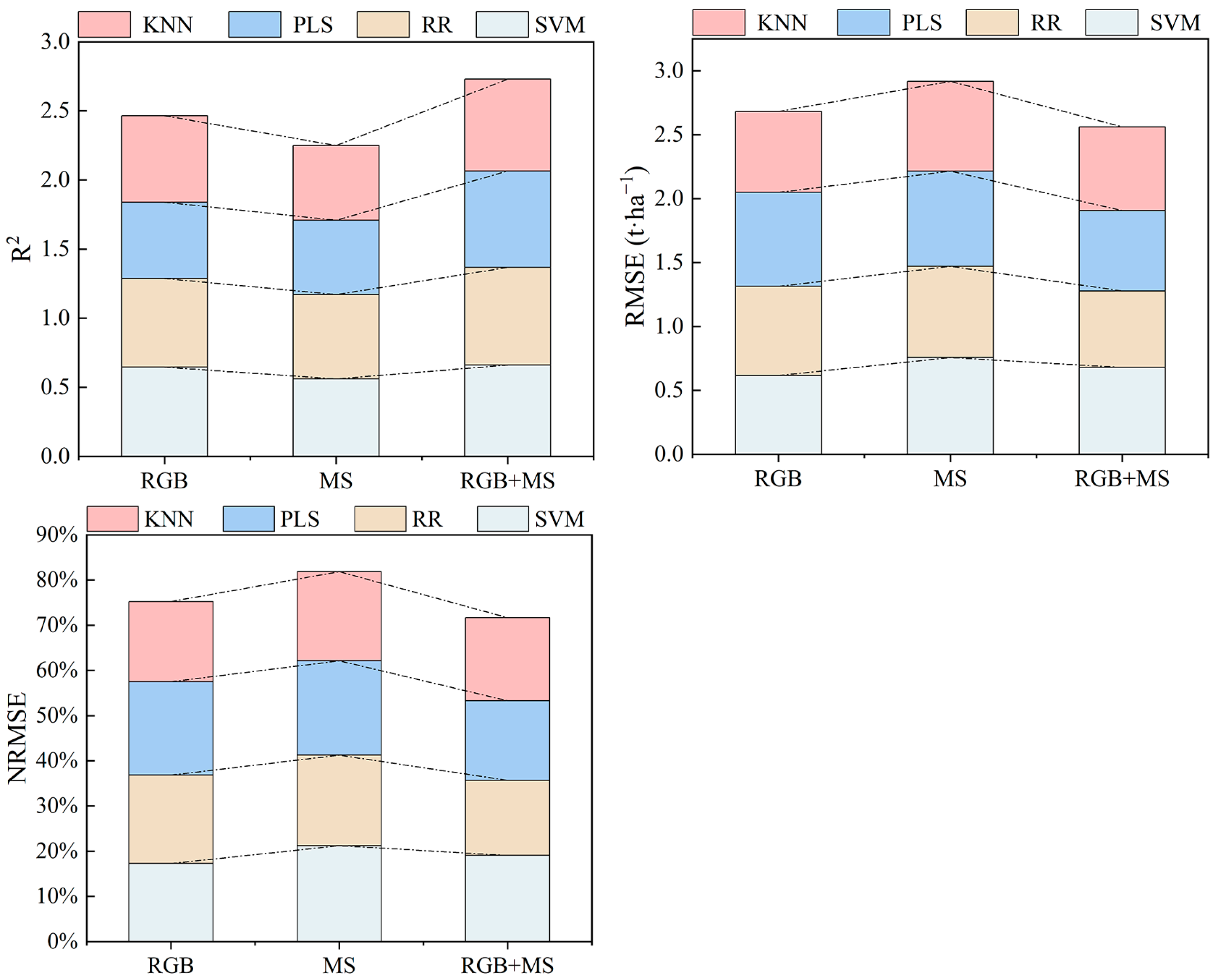
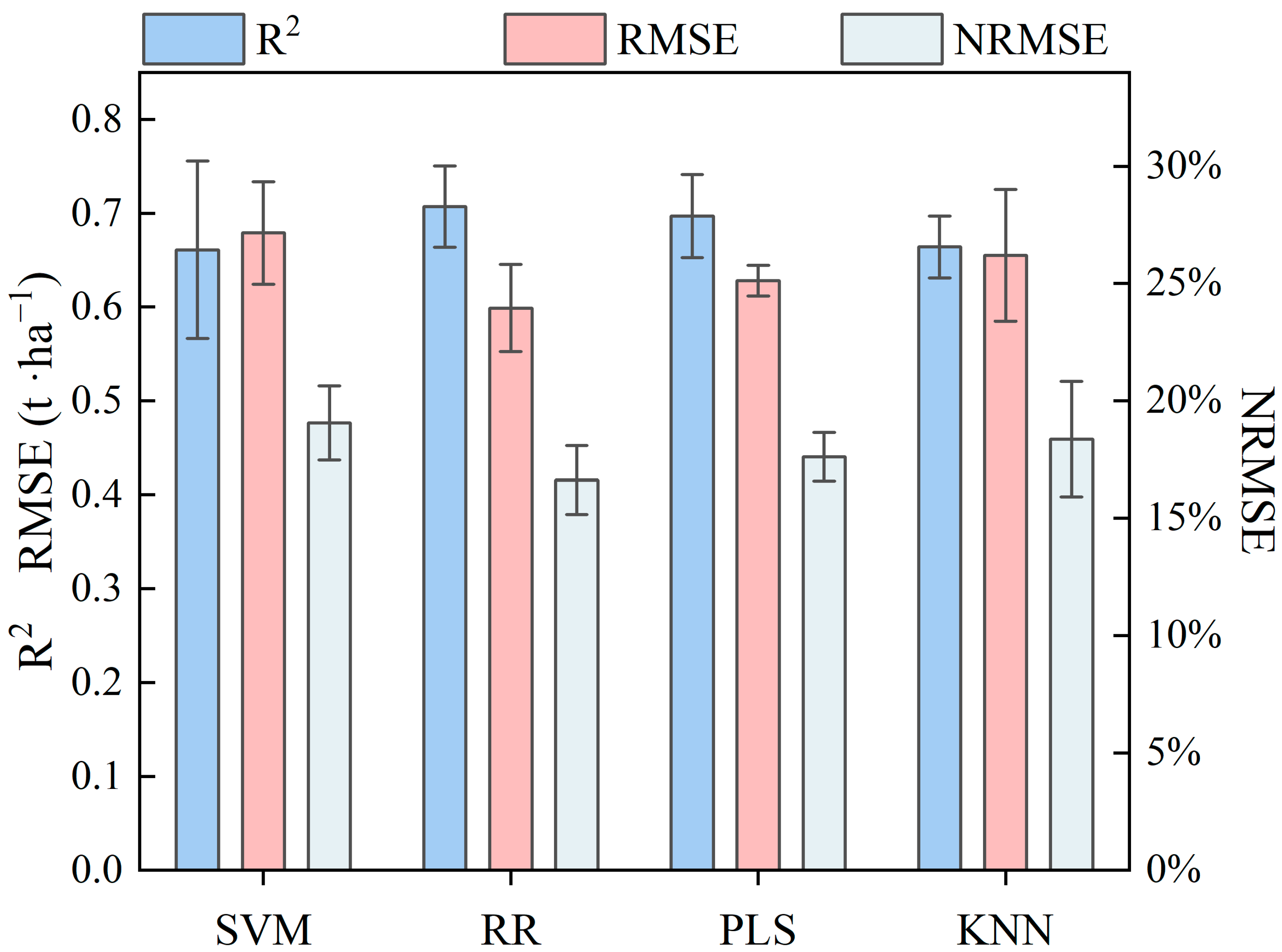
3.4. Optimal ML Algorithm for Faba Bean Yield Estimation
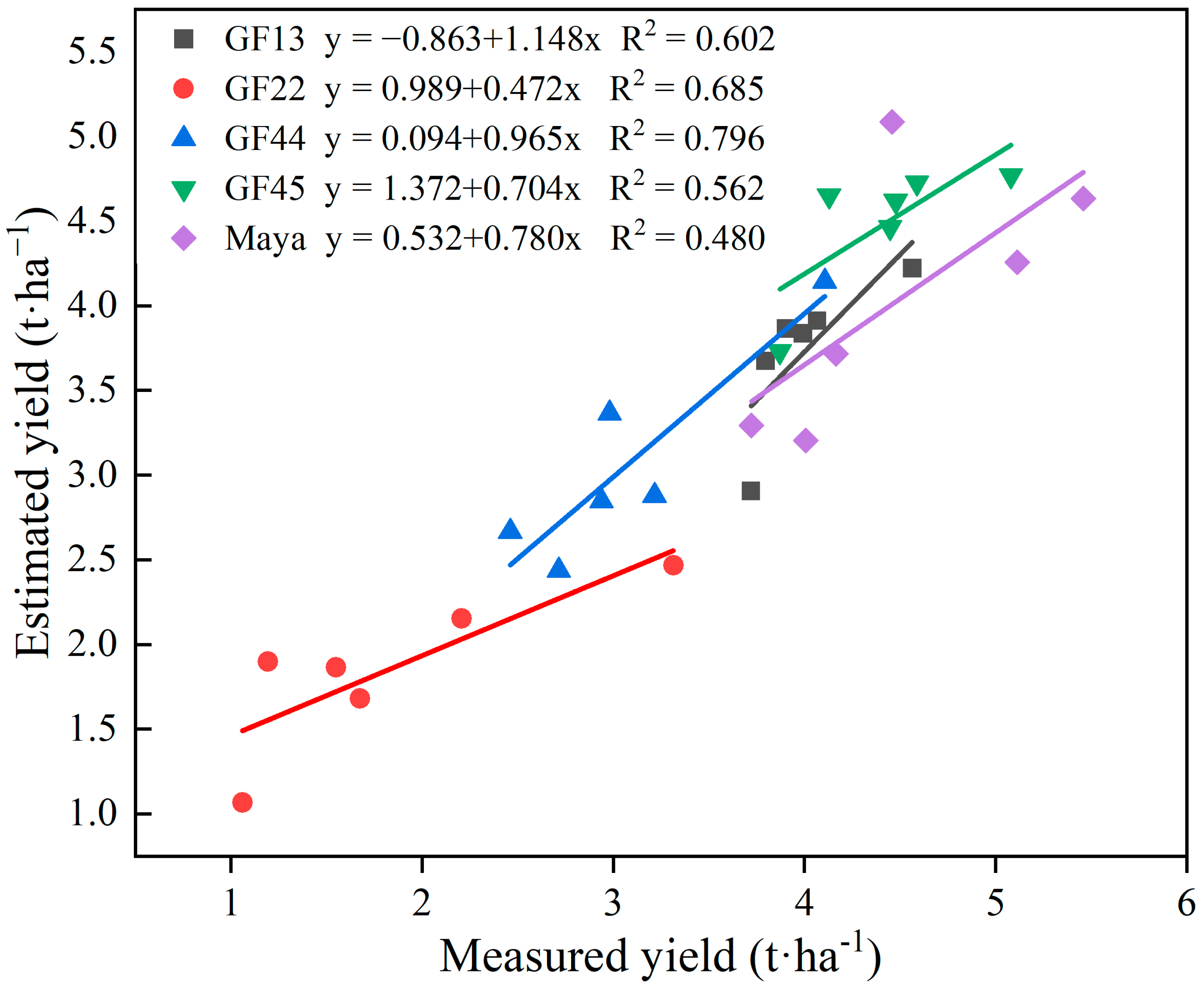
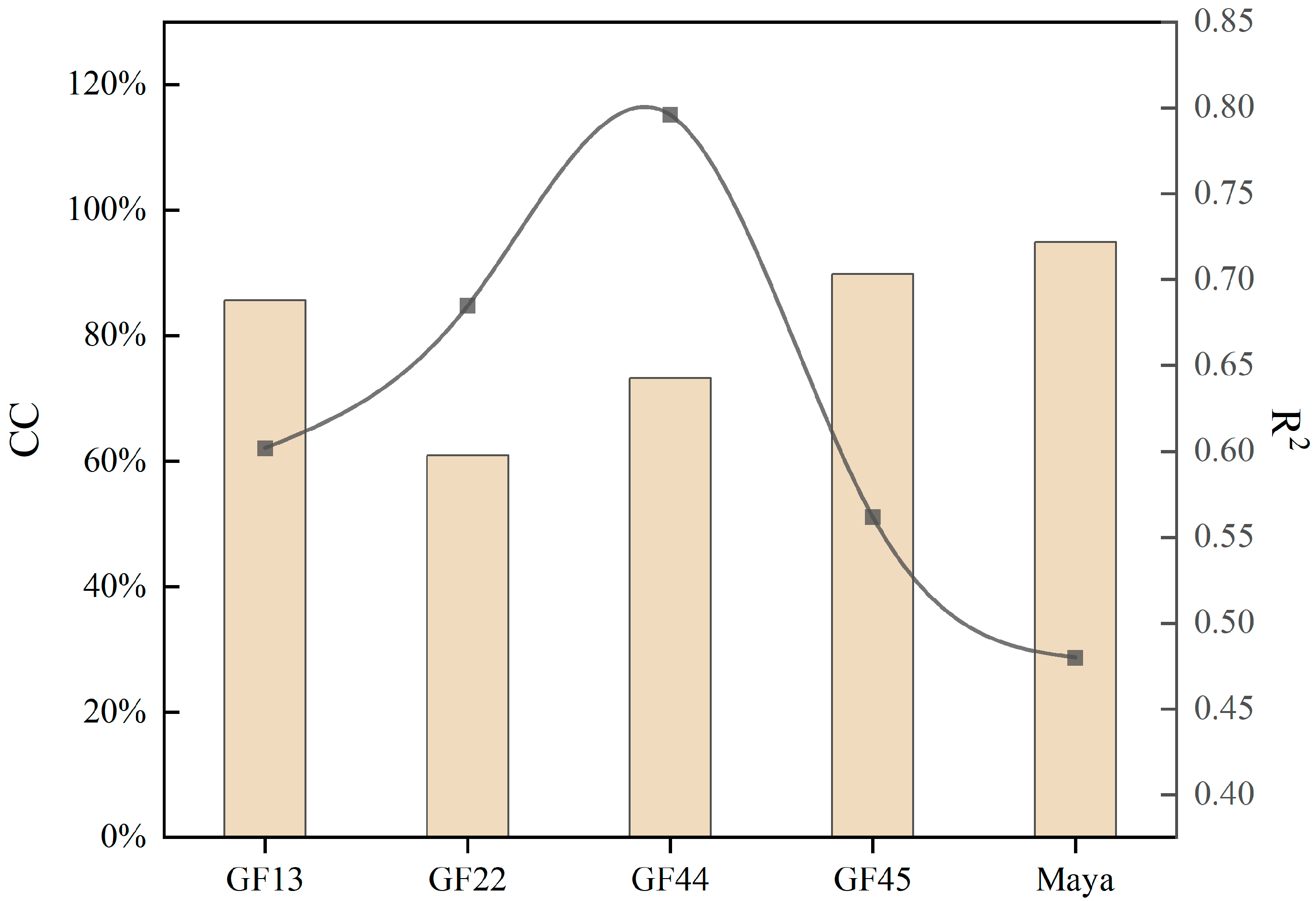
3.5. Influence of Faba Bean Variety on Yield Estimation Model
4. Discussion
4.1. The Effects of Growth Periods Data on Yield Estimation
4.2. Contribution of Individual Sensor Data and Dual-Sensor Data Fusion to Yield Estimation
4.3. Effects of Different ML Algorithms on Yield Estimation Model
4.4. The Effects of Faba Bean Variety and Growth on Yield Estimation
4.5. Limitations and Implications
5. Conclusions
- (1)
- The effects of growth periods were explored in this study. The model based on S2 (12 July 2019) exhibited a higher estimation accuracy than the models based on the other single-growth periods. The model based on the combination of S2 and S3 (12 August 2019) exhibited a higher estimation accuracy than the models based on the other combined growth periods;
- (2)
- The models based on fused dual-sensor data yielded higher estimation accuracies than the models based on single-sensor data;
- (3)
- The comparison of four ML algorithms (SVM, RR, PLS, and KNN) showed that RR resulted in the highest yield estimation accuracy, followed by PLS; the SVM- and KNN-based models exhibited the worst performances.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abete, I.; Romaguera, D.; Vieira, A.R.; Lopez, M.A.; Norat, T. Association between total, processed, red and white meat consumption and all-cause, CVD and IHD mortality: A meta-analysis of cohort studies. Br. J. Nutr. 2014, 112, 762–775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Z.; Franco, O.H.; Lamballais, S.; Ikram, M.A.; Schoufour, J.D.; Muka, T.; Voortman, T. Associations of specific dietary protein with longitudinal insulin resistance, prediabetes and type 2 diabetes: The Rotterdam: The Rotterdam Study. Clin. Nutr. 2020, 39, 242–249. [Google Scholar] [CrossRef] [PubMed]
- Farvid, M.S.; Sidahmed, E.; Spence, N.D.; Angua, M.K.; Rosner, B.A.; Barnett, J.B. Consumption of red meat and processed meat and cancer incidence: A systematic review and meta-analysis of prospective studies. Eur. J. Epidemiol. 2021, 36, 937–951. [Google Scholar] [CrossRef] [PubMed]
- Martineau-Côté, D.; Achouri, A.; Karboune, S.; L’Hocine, L. Faba Bean: An Untapped Source of Quality Plant Proteins and Bio-actives. Nutrients 2022, 14, 1541. [Google Scholar] [CrossRef]
- Burud, I.; Lange, G.; Lillemo, M.; Bleken, E.; Grimstad, L.; From, P.J. Exploring Robots and UAVs as Phenotyping Tools in Plant Breeding. IFAC-Pap. 2017, 50, 11479–11484. [Google Scholar] [CrossRef]
- Shafiee, S.; Lied, L.M.; Burud, I.; Dieseth, J.A.; Alsheikh, M.; Lillemo, M. Sequential forward selection and support vector regression in comparison to LASSO regression for spring wheat yield prediction based on UAV imagery. Comput. Electron. Agric. 2021, 183, 106036. [Google Scholar] [CrossRef]
- Peñuelas, J.; Gamon, J.; Fredeen, A.; Merino, J.Á.; Field, C.B. Reflectance indices associated with physiological changes in nitrogen- and water-limited sunflower leaves. Remote Sens. Environ. 1994, 48, 135–146. [Google Scholar] [CrossRef]
- Marino, B.D.; Geissler, P.; O’connell, B.; Dieter, N.; Burgess, T.; Roberts, C.; Lunine, J. Multispectral imaging of vegetation at Biosphere 2. Ecol. Eng. 1999, 13, 321–331. [Google Scholar] [CrossRef]
- Feng, L.; Zhang, Z.; Ma, Y.; Du, Q.; Williams, P.; Drewry, J.; Luck, B. Alfalfa Yield Prediction Using UAV-Based Hyperspectral Imagery and Ensemble Learning. Remote Sens. 2020, 12, 2028. [Google Scholar] [CrossRef]
- Bhadra, S.; Sagan, V.; Maimaitijiang, M.; Maimaitiyiming, M.; Newcomb, M.; Shakoor, N.; Mockler, T.C. Quantifying Leaf Chlorophyll Concentration of Sorghum from Hyperspectral Data Using Derivative Calculus and Machine Learning. Remote Sens. 2020, 12, 2082. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.D.; Sudduth, K.A.; Zhang, M. Yield estimation in cotton using UAV-based multi-sensor imagery. Biosyst. Eng. 2020, 193, 101–114. [Google Scholar] [CrossRef]
- Herrero-Huerta, M.; Rodriguez-Gonzalvez, P.; Rainey, K.M. Yield prediction by machine learning from UAS-based mulit-sensor data fusion in soybean. Plant Methods 2020, 16, 78. [Google Scholar] [CrossRef]
- Fei, S.; Hassan, M.A.; He, Z.; Chen, Z.; Shu, M.; Wang, J.; Li, C.; Xiao, Y. Assessment of Ensemble Learning to Predict Wheat Grain Yield Based on UAV-Multispectral Reflectance. Remote Sens. 2021, 13, 2338. [Google Scholar] [CrossRef]
- Fei, S.; Hassan, M.A.; Xiao, Y.; Su, X.; Chen, Z.; Cheng, Q.; Duan, F.; Chen, R.; Ma, Y. UAV-based multi-sensor data fusion and machine learning algorithm for yield prediction in wheat. Precis. Agric. 2023, 24, 187–212. [Google Scholar] [CrossRef]
- Sharma, L.K.; Bu, H.; Franzen, D.W.; Denton, A. Use of corn height measured with an acoustic sensor improves yield estimation with ground based active optical sensors. Comput. Electron. Agric. 2016, 124, 254–262. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Jin, X.; Nie, C.; Wang, S.; Yu, X.; Cheng, M.; Shao, M.; Wang, Z.; Tuohuti, N.; Bai, Y.; et al. Estimating leaf area index using unmanned aerial vehicle data: Shallow vs. deep machine learning algorithms. Plant Physiol. 2021, 187, 1551–1576. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Fu, P.; Meacham-Hensold, K.; Guan, K.; Bernacchi, C.J. Hyperspectral Leaf Reflectance as Proxy for Photosynthetic Capacities: An Ensemble Approach Based on Multiple Machine Learning Algorithms. Front. Plant Sci. 2019, 10, 730. [Google Scholar] [CrossRef]
- Jin, X.; Li, Z.; Feng, H.; Ren, Z.; Li, S. Deep neural network algorithm for estimating maize biomass based on simulated Sentinel 2A vegetation indices and leaf area index. Crop. J. 2020, 8, 87–97. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Beyond the traditional NDVI index as a key factor to mainstream the use of UAV in precision viticulture. Sci. Rep. 2021, 11, 2721. [Google Scholar] [CrossRef]
- Yu, D.; Zha, Y.; Shi, L.; Jin, X.; Hu, S.; Yang, Q.; Huang, K.; Zeng, W. Improvement of sugarcane yield estimation by assimilating UAV-derived plant height observations. Eur. J. Agron. 2020, 121, 126159. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Zhang, Q.; Duan, R.; Liu, J.; Qin, Y.; Wang, X. Toward Multi-Stage Phenotyping of Soybean with Multimodal UAV Sensor Data: A Comparison of Machine Learning Approaches for Leaf Area Index Estimation. Remote Sens. 2022, 15, 7. [Google Scholar] [CrossRef]
- Tunrayo, R.A.; Abush, T.A.; Godfree, C.; Fowobaje, K.R. Estimation of soybean grain yield from multispectral high-resolution UAV data with machine learning models in West Africa. Remote Sens. Appl. 2022, 27, 100782. [Google Scholar]
- Han, L.; Yang, G.; Dai, H.; Xu, B.; Yang, H.; Feng, H.; Li, Z.; Yang, X. Modeling maize above-ground biomass based on machine learning approaches using UAV remote-sensing data. Plant Methods 2019, 15, 10. [Google Scholar] [CrossRef] [Green Version]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Woebbecke, D.M.; Meyer, G.E.; Bargen, K.V.; Mortensen, D. Plant species identification, size, and enumeration using machine vision techniques on near-binary images. Opt. Agric. For. 1993, 1836, 208–219. [Google Scholar]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially located platform and aerial photography for documentation of grazing impacts on wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Bargen, K.V.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1994, 38, 259–269. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, L08403. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture and Other Resource Management, Bloomington, MN, USA, 16–19 July 2000; American Society of Agronomy Publishers: Madison, WI, USA, 2020; pp. 16–19. [Google Scholar]
- Gitelson, A.A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus hippocastanum L. and Acer platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; Brown de Colstoun, E.; McMurtrey, J.E., III. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2020, 74, 229–239. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn. Agron. J. 2005, 97, 1443–1451. [Google Scholar] [CrossRef]
- Cao, Q.; Miao, Y.; Wang, H.; Huang, S.; Cheng, S.; Khosla, R.; Jiang, R. Non-destructive estimation of rice plant nitrogen status with Crop Circle multispectral active canopy sensor. Field Crop. Res. 2013, 154, 33–44. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Roujean, J.; Breon, F. Estimating par absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The MERIS terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V.N. Support Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Yu, C.; Gao, F.; Wen, Q. An improved quantum algorithm for ridge regression. IEEE Trans. Knowl. Data Eng. 2019, 33, 1. [Google Scholar] [CrossRef] [Green Version]
- Durand, J.F.; Sabatier, R. Additive Splines for Partial Least Squares Regression. JASA 1997, 92, 440. [Google Scholar] [CrossRef]
- Steele, B.M. Exact bootstrap k-nearest neighbor learners. Mach. Learn. 2009, 74, 235–255. [Google Scholar] [CrossRef] [Green Version]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995; pp. 119–166. [Google Scholar]
- Ji, Y.; Chen, Z.; Cheng, Q.; Liu, R.; Li, M.; Yan, X.; Li, G.; Wang, D.; Fu, L.; Ma, Y.; et al. Estimation of plant height and yield based on UAV imagery in faba bean (Vicia faba L.). Plant Methods 2022, 18, 26. [Google Scholar] [CrossRef]
- Cherkassky, V.S.; Ma, Y. Practical selection of SVM parameters and noise estimation for SVM regression. Neural Netw. 2004, 17, 113–126. [Google Scholar] [CrossRef] [Green Version]
- Tikhonov, A.N. On the stability of inverse problems. C.R. Acad. Sci. URSS 1943, 39, 170–176. [Google Scholar]
- Hoerl, A.E.; Kennard, R.W. Ridge Regression: Applications to nonorthogonal problems. Technometrics 1970, 12, 69–82. [Google Scholar] [CrossRef]
- Hang, R.; Liu, Q.; Song, H.; Sun, Y.; Pei, H. Graph regularized nonlinear ridge regression for remote sensing data analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 277–285. [Google Scholar] [CrossRef]
- Duan, B.; Liu, Y.; Gong, Y.; Peng, Y.; Wu, X.; Zhu, R.; Fang, S. Remote estimation of rice LAI based on Fourier spectrum texture from UAV image. Plant Methods 2019, 15, 124. [Google Scholar] [CrossRef] [Green Version]
- Starks, P.J.; Brown, M.A. Prediction of Forage Quality from Remotely Sensed Data: Comparison of Cultivar-Specific and Cultivar-Independent Equations Using Three Methods of Calibration. Crop. Sci. 2010, 50, 2159. [Google Scholar] [CrossRef]
- Almutairi, E.S.; Abbod, M.F. Machine Learning Methods for Diabetes Prevalence Classification in Saudi Arabia. Modelling 2023, 4, 37–55. [Google Scholar] [CrossRef]
- Moudrý, V.; Šímová, P. Influence of positional accuracy, sample size and scale on modelling species distributions: A review. Int. J. Geogr. Inf. Sci. 2012, 26, 2083–2095. [Google Scholar] [CrossRef]
- Ariza-Sentís, M.; Valente, J.; Kooistra, L.; Kramer, H.; Mücher, S. Estimation of spinach (Spinacia oleracea) seed yield with 2D UAV data and deep learning. Smart Agric. Technol. 2023, 3, 100129. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, Y.; Tao, X.; Chen, X.; Li, X. Rapid prediction of winter wheat yield and nitrogen use efficiency using consumer-grade unmanned aerial vehicles multispectral imagery. Front. Plant Sci. 2022, 13, 1032170. [Google Scholar] [CrossRef]
- Impollonia, G.; Croci, M.; Ferrarini, A.; Brook, J.; Martani, E.; Blandinières, H.; Marcone, A.; Awty-Carroll, D.; Ashman, C.; Kam, J.; et al. UAV Remote Sensing for High-Throughput Phenotyping and for Yield Prediction of Miscanthus by Machine Learning Techniques. Remote Sens. 2022, 14, 2927. [Google Scholar] [CrossRef]
- Cheng, M.; Penuelas, J.; McCabe, M.F.; Atzberger, C.; Jiao, X.; Wu, W.; Jin, X. Combining multi-indicators with machine-learning algorithms for maize yield early prediction at the county-level in China. Agric. For. Meteorol. 2022, 323, 109057. [Google Scholar] [CrossRef]
- Ji, Y.; Liu, R.; Xiao, Y.; Cui, Y.; Chen, Z.; Zong, X.; Yang, T. Faba bean above-ground biomass and bean yield estimation based on consumer-grade unmanned aerial vehicle RGB images and ensemble learning. Precis. Agric. 2023, accepted. [Google Scholar] [CrossRef]
- Boyes, D.C.; Zayed, A.M.; Ascenzi, R.; McCaskill, A.J.; Hoffman, N.E.; Davis, K.R.; Gorlach, J. Growth stage-based phenotypic analysis of Arabidopsis: A model for high throughput functional genomics in plants. Plant Cell 2001, 13, 1499–1510. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oehme, L.H.; Reineke, A.J.; Weiß, T.M.; Würschum, T.; He, X.; Müller, J. Remote Sensing of Maize Plant Height at Different Growth Stages Using UAV-Based Digital Surface Models (DSM). Agronomy 2022, 12, 958. [Google Scholar] [CrossRef]
- Shi, D.; Lee, T.; Maydeu-Olivares, A. Understanding the Model Size Effect on SEM Fit Indices. Educ. Psychol. Meas. 2019, 79, 310–334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Wan, L.; Cen, H.; Zhu, J.; Zhang, J.; Zhu, Y.; Sun, D.; Du, X.; Zhai, L.; Weng, H.; Li, Y.; et al. Grain yield prediction of rice using multi-temporal UAV-based RGB and multispectral images and model transfer-A case study of small farmlands in the South of China. Agric. For. Meteorol. 2020, 291, 108096. [Google Scholar] [CrossRef]
- Stanton, C.; Starek, M.J.; Elliott, N.C.; Brewer, M.J.; Maeda, M.; Chu, T. Unmanned aircraft system-derived crop height and normalized difference vegetation index metrics for sorghum yield and aphid stress assessment. J. Appl. Remote Sens. 2017, 11, 026035. [Google Scholar] [CrossRef] [Green Version]
- Geipel, J.; Link, J.; Claupein, W. Combined spectral and spatial modeling of corn yield based on aerial images and crop surface models acquired with an unmanned aircraft system. Remote Sens. 2014, 6, 10335. [Google Scholar] [CrossRef] [Green Version]
- Ganeva, D.; Roumenina, E.; Dimitrov, P.; Gikov, A.; Jelev, G.; Dragov, R.; Bozhanova, V.; Taneva, K. Phenotypic Traits Estimation and Preliminary Yield Assessment in Different Phenophases of Wheat Breeding Experiment Based on UAV Multispectral Images. Remote Sens. 2022, 14, 1019. [Google Scholar] [CrossRef]
- Hernandez, J.; Lobos, G.; Matus, I.; Del Pozo, A.; Silva, P.; Galleguillos, M. Using ridge regression models to estimate grain yield from field spectral data in bread wheat (Triticum aestivum L.) grown under three water regimes. Remote Sens. 2015, 7, 2109–2126. [Google Scholar] [CrossRef] [Green Version]
- Lazaridis, D.C.; Verbesselt, J.; Robinson, A.P. Penalized regression techniques for prediction: A case study for predicting tree mortality using remotely sensed vegetation indices. Can. J. For. Res. 2011, 41, 24–34. [Google Scholar] [CrossRef]
- Maeoka, R.E.; Sadras, V.O.; Ciampitti, I.A.; Diaz, D.R.; Fritz, A.K.; Lollato, R.P. Changes in the Phenotype of Winter Wheat Varieties Released Between 1920 and 2016 in Response to In-Furrow Fertilizer: Biomass Allocation, Yield, and Grain Protein Concentration. Front. Plant Sci. 2020, 10, 1786. [Google Scholar] [CrossRef] [Green Version]
- Dai, W.; Guan, Q.; Cai, S.; Liu, R.; Chen, R.; Liu, Q.; Chen, C.; Dong, Z. A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests. Remote Sens. 2022, 14, 1188. [Google Scholar] [CrossRef]
- Mcdermid, G.J.; Hall, R.J.; Sanchez-Azofeifa, G.A.; Franklin, S.E. Remote sensing and forest inventory for wildlife habitat assessment. Forest Ecol. Manag. 2009, 257, 2262–2269. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Z.; Wang, C.; Yang, C. Modeling and prediction of CO2 exchange response to environment for small sample size in cucumber. Comput. Electron. Agric. 2014, 108, 39–45. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Spectral Indices | Formula | References |
|---|---|---|---|
| RGB | R | DN value of red band | — |
| G | DN value of green band | — | |
| B | DN value of blue band | — | |
| Green–red vegetation index | GRVI = (G − R)/(G + R) | [26] | |
| Normalized difference index | NDI = (r − g)/(r + g + 0.01) | [27] | |
| Green leaf index | GLI = (2 × G − R − B)/(2 × G + R+ B) | [28] | |
| Visible atmospherically resistant index | VARI = (G − R)/(G + R − B) | [29] | |
| Excess red index | ExR = 1.4 × R − G | [30] | |
| Excess green index | ExG = 2 × G − R − B | [31] | |
| Excess green minus excess red index | ExGR = 2 × G − R − B − (1.4 × R − G) | [30] | |
| Modified green–red vegetation index | MGRVI = (G2 − R2)/(G2 + R2) | [18] | |
| Red edge chlorophyll index | CIre = (RN/RR) − 1 | [32] | |
| Green chlorophyll index | CIg = (RN/RG) − 1 | [33] | |
| Green Leaf Index | GLI = (2 × RG − RB − RR)/(2 × RG + RB + RR) | [28] | |
| MS | Normalized difference red edge index | NDRE = (RN − RRE)/(RN + RRE) | [34] |
| Normalized difference vegetation index red edge | NDVIRE = (RRE − RR)/(RRE + RR) | [35] | |
| Modifed chlorophyll absorption in refectance index | MCARI = [(RRE − RR) − 0.2 × (RRE − RG)] × (RRE/RR) | [36] | |
| Modified chlorophyll absorption reflectance index 2 | MCARI2 = 1.5 × [2.5 × (RN − RRE) − 1.3 × (RN − RG)]/[2 × (RN + 1)2 − (6 × RN − 5 × RR2) − 0.5] | [37] | |
| Optimized SAVI | OSAVI = (RN − RR)/(RN − RR + 0.16) | [38] | |
| MCARI1/OSAVI | MCARI1/OSAVI | [36] | |
| Green ratio vegetation index | GRVI = RN/RR | [39] | |
| Normalized red-edge index | NREI = RRE/(RN + RRE +RG) | [40] | |
| Modified normalized difference index | MNDI = (RN − RRE)/(RN − RG) | [40] | |
| Green Modified Simple Ratio | MSR_G = (RRE/RG − 1)/(RRE/RG + 1)0.5 | [41] | |
| Green re-normalized difference vegetation index | GRDVI = (RN − RG)/(RN + RR)0.5 | [42] | |
| Meris terrestrial chlorophyll index | MTCI = (RN − RRE)/(RRE − RR) | [43] |
| Period | Algorithm | RGB | MS | RGB + MS | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | NRMSE | R2 | RMSE | NRMSE | R2 | RMSE | NRMSE | ||
| S1 | SVM | 0.388 | 0.866 | 24.296% | 0.368 | 0.957 | 26.850% | 0.404 | 0.910 | 25.535% |
| RR | 0.592 | 0.856 | 24.020% | 0.521 | 0.711 | 19.97% | 0.594 | 0.806 | 22.63% | |
| PLS | 0.552 | 0.818 | 22.950% | 0.588 | 0.812 | 22.803% | 0.593 | 0.748 | 20.983% | |
| KNN | 0.491 | 0.896 | 25.145% | 0.417 | 0.896 | 25.143% | 0.507 | 0.866 | 24.306% | |
| S2 | SVM | 0.646 | 0.616 | 17.277% | 0.561 | 0.756 | 21.219% | 0.661 | 0.679 | 19.062% |
| RR | 0.641 | 0.697 | 19.563% | 0.610 | 0.714 | 20.039% | 0.707 | 0.599 | 16.626% | |
| PLS | 0.552 | 0.736 | 20.649% | 0.538 | 0.744 | 20.880% | 0.697 | 0.628 | 17.615% | |
| KNN | 0.626 | 0.633 | 17.764% | 0.541 | 0.703 | 19.721% | 0.664 | 0.655 | 18.373% | |
| S3 | SVM | 0.503 | 1.005 | 28.219% | 0.469 | 0.862 | 24.184% | 0.553 | 0.774 | 21.731% |
| RR | 0.626 | 0.743 | 20.037% | 0.600 | 0.714 | 20.032% | 0.697 | 0.687 | 19.272% | |
| PLS | 0.621 | 0.776 | 21.772% | 0.628 | 0.877 | 24.610% | 0.632 | 0.730 | 20.483% | |
| KNN | 0.299 | 0.645 | 18.090% | 0.374 | 0.931 | 26.125% | 0.622 | 0.690 | 19.362% | |
| Periods | Evaluation Metrics | SVM | RR | PLS | KNN |
|---|---|---|---|---|---|
| S1 + S2 | R2 | 0.614 | 0.723 | 0.638 | 0.556 |
| RMSE | 0.665 | 0.717 | 0.728 | 0.820 | |
| NRMSE | 18.663% | 20.111% | 20.423% | 23.005% | |
| S2 + S3 | R2 | 0.638 | 0.758 | 0.695 | 0.658 |
| RMSE | 0.649 | 0.622 | 0.594 | 0.801 | |
| NRMSE | 18.201% | 17.463% | 16.678% | 22.476% | |
| S1 + S2 + S3 | R2 | 0.631 | 0.738 | 0.719 | 0.517 |
| RMSE | 0.647 | 0.714 | 0.580 | 0.813 | |
| NRMSE | 18.165% | 20.049% | 16.278% | 22.808% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; Ji, Y.; Liu, R.; Li, W.; Liu, Y.; Liu, Z.; Zong, X.; Yang, T. Faba Bean (Vicia faba L.) Yield Estimation Based on Dual-Sensor Data. Drones 2023, 7, 378. https://doi.org/10.3390/drones7060378
Cui Y, Ji Y, Liu R, Li W, Liu Y, Liu Z, Zong X, Yang T. Faba Bean (Vicia faba L.) Yield Estimation Based on Dual-Sensor Data. Drones. 2023; 7(6):378. https://doi.org/10.3390/drones7060378
Chicago/Turabian StyleCui, Yuxing, Yishan Ji, Rong Liu, Weiyu Li, Yujiao Liu, Zehao Liu, Xuxiao Zong, and Tao Yang. 2023. "Faba Bean (Vicia faba L.) Yield Estimation Based on Dual-Sensor Data" Drones 7, no. 6: 378. https://doi.org/10.3390/drones7060378