
Performance Analysis of a Drone-Assisted FSO Communication System over Málaga Turbulence under AoA Fluctuations


Abstract
:1. Introduction
- •
- A drone-assisted FSO communication system is established, considering the effects of atmospheric attenuation, atmospheric turbulence, pointing errors, and AoA fluctuations for the first time, where the FSO link undergoes the Málaga fading.
- •
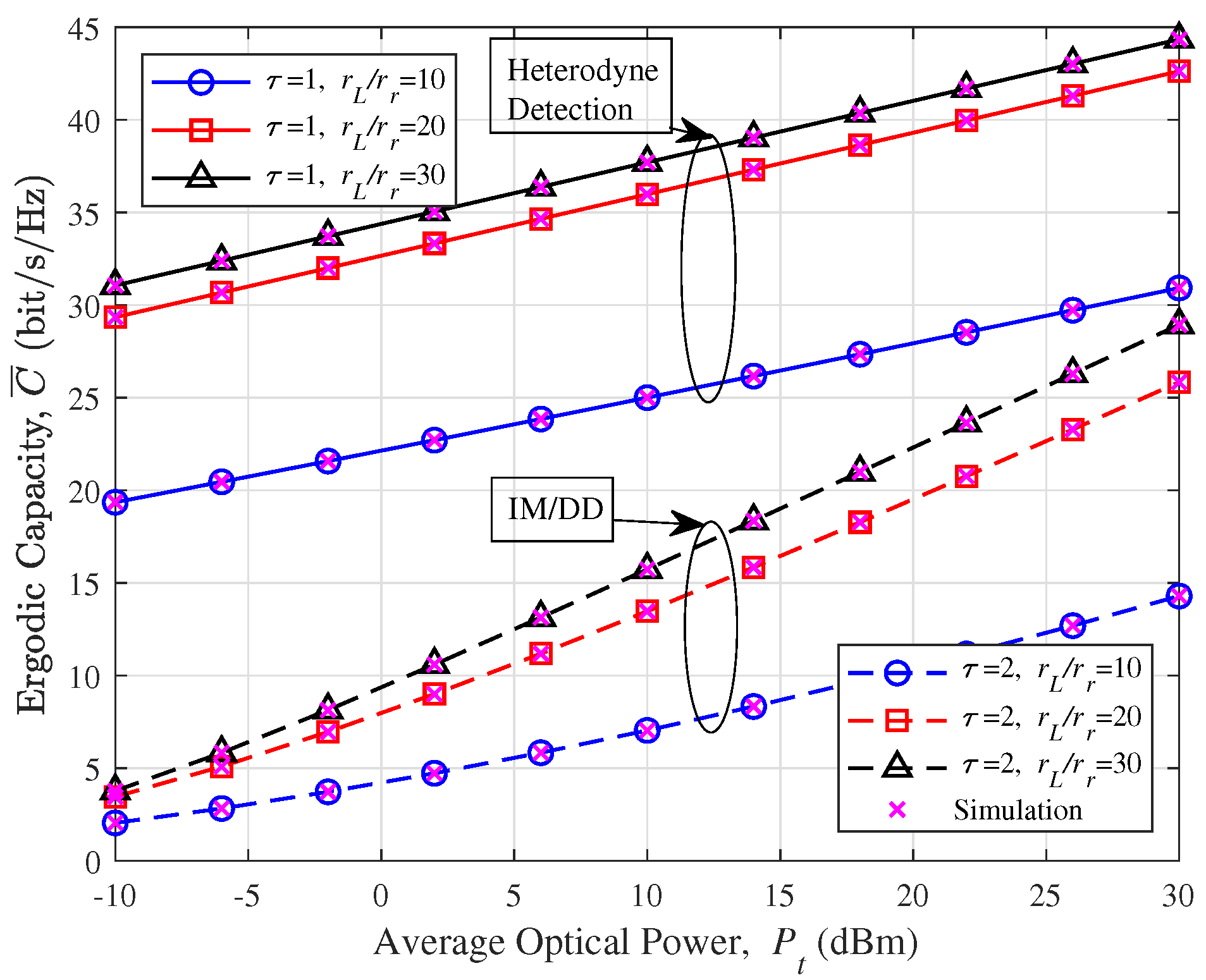
- The statistical expressions for the probability density function (PDF) and the cumulative distribution function (CDF) of the drone-assisted FSO link are derived using the IM/DD and the heterodyne detection techniques, respectively. In addition, closed-form expressions for the average BER and the ergodic capacity are derived.
- •
- The asymptotic expression for the average BER under the heterodyne detection technique at high optical power is also proposed to offer enhanced insights into the system and gain useful engineering applications.
2. System and Channel Models
2.1. Atmospheric Attenuation
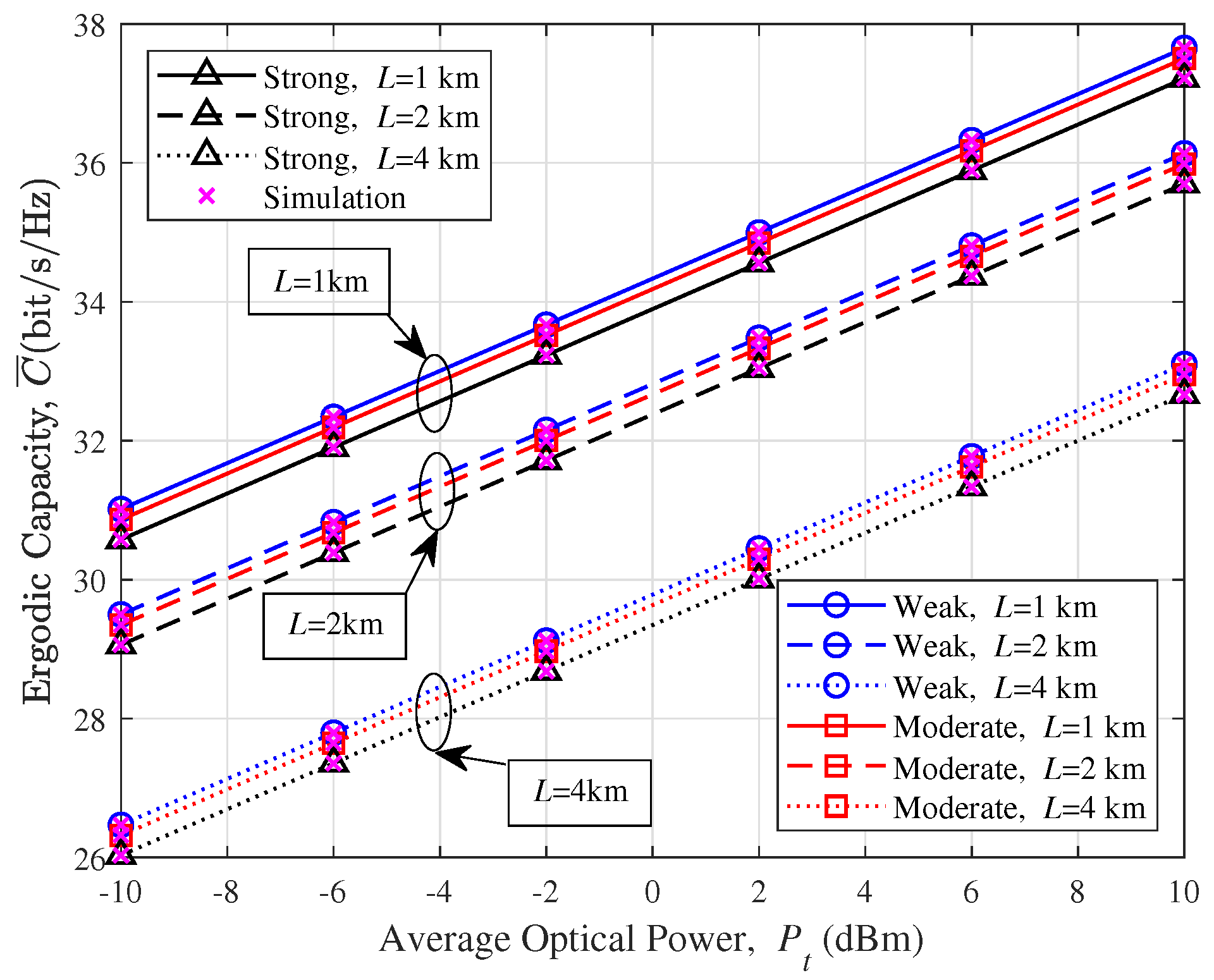
2.2. Atmospheric Turbulence
2.3. Pointing Error Impairments
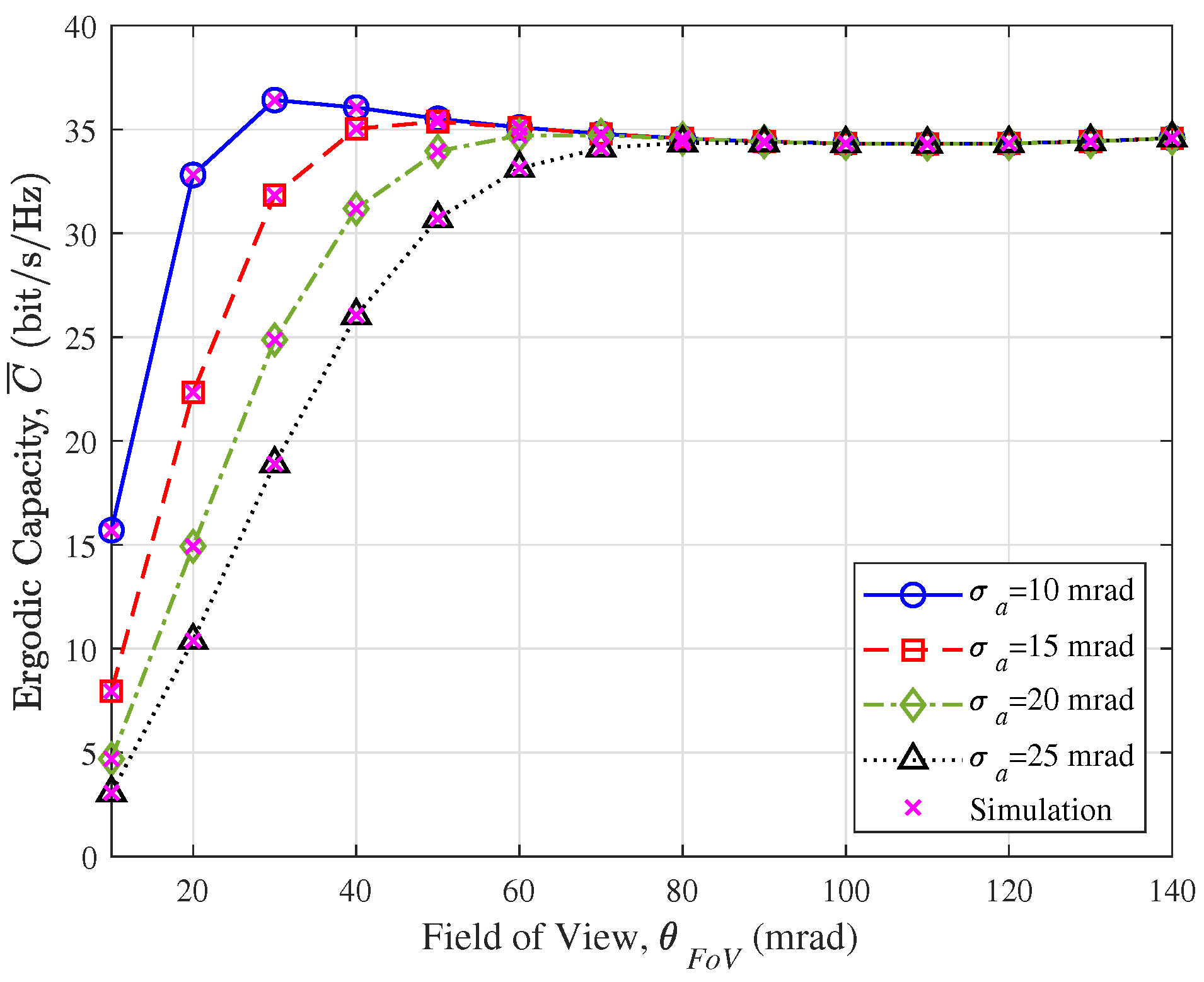
2.4. Angle-of-Arrival Fluctuations
3. Performance Analysis
3.1. Average Bit Error Rate
3.2. Ergodic Capacity
4. Simulations and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Proposition 1
References
- Juarez, J.C.; Dwivedi, A.; Hammons, A.R.; Jones, S.D.; Weerackody, V.; Nichols, R.A. Free-Space Optical Communications for Next-generation Military Networks. IEEE Commun. Mag. 2006, 44, 46–51. [Google Scholar] [CrossRef]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M.S. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef] [Green Version]
- Yılmaz, A.; Toker, C. Air-to-Air Channel Model for UAV Communications. In Proceedings of the 2022 30th Signal Processing and Communications Applications Conference (SIU), Safranbolu, Turkey, 15–18 May 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wang, J.; Jin, Y. An Enhanced Competitive Swarm Optimizer With Strongly Convex Sparse Operator for Large-Scale Multiobjective Optimization. IEEE Trans. Evol. Comput. 2022, 26, 859–871. [Google Scholar] [CrossRef]
- Zhu, J.; Wei, Z.; Wu, H.; Qiu, C.; Feng, Z. Capacity of UAV-assisted Air-to-Ground Communication with Random Perturbation of UAV Platform. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; pp. 275–279. [Google Scholar] [CrossRef]
- Muruganathan, S.D.; Lin, X.; Määttänen, H.L.; Sedin, J.; Zou, Z.; Hapsari, W.A.; Yasukawa, S. An Overview of 3GPP Release-15 Study on Enhanced LTE Support for Connected Drones. IEEE Commun. Stand. Mag. 2021, 5, 140–146. [Google Scholar] [CrossRef]
- Kahn, J.M.; Miller, D.A. Communications expands its space. Nat. Photonics 2017, 11, 5–8. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, N.; Xu, M.; Xu, Z.; Zhang, Q.; Song, Z. Outage Probability and Average BER of UAV-assisted Dual-hop FSO Communication with Amplify-and-Forward Relaying. IEEE Trans. Veh. Technol. 2023. [Google Scholar] [CrossRef]
- Wang, J.Y.; Ma, Y.; Lu, R.R.; Wang, J.B.; Lin, M.; Cheng, J. Hovering UAV-Based FSO Communications: Channel Modelling, Performance Analysis, and Parameter Optimization. IEEE J. Sel. Areas Commun. 2021, 39, 2946–2959. [Google Scholar] [CrossRef]
- Guo, W.; Shi, Z.; Zhan, Y.; Yang, L. BER Performance Analysis of Ground-to-UAV FSO SIMO Links with Optimized Channel Model. In Proceedings of the 2021 19th International Conference on Optical Communications and Networks (ICOCN), Qufu, China, 23–27 August 2021; pp. 1–3. [Google Scholar] [CrossRef]
- Le, H.D.; Pham, A.T. Level Crossing Rate and Average Fade Duration of Satellite-to-UAV FSO Channels. IEEE Photonics J. 2021, 13, 1–14. [Google Scholar] [CrossRef]
- Najafi, M.; Ajam, H.; Jamali, V.; Diamantoulakis, P.D.; Karagiannidis, G.K.; Schober, R. Statistical Modeling of the FSO Fronthaul Channel for UAV-Based Communications. IEEE Trans. Commun. 2020, 68, 3720–3736. [Google Scholar] [CrossRef] [Green Version]
- Kashani, M.A.; Safari, M.; Uysal, M. Optimal Relay Placement and Diversity Analysis of Relay-Assisted Free-Space Optical Communication Systems. J. Opt. Commun. Netw. 2013, 5, 37–47. [Google Scholar] [CrossRef]
- Khallaf, H.S.; Shalaby, H.M.H.; Garrido-Balsells, J.M.; Sampei, S. Performance Analysis of a Hybrid QAM-MPPM Technique Over Turbulence-Free and Gamma–Gamma Free-Space Optical Channels. J. Opt. Commun. Netw. 2017, 9, 161–171. [Google Scholar] [CrossRef]
- Balti, E.; Guizani, M.; Hamdaoui, B. Hybrid Rayleigh and Double-Weibull over impaired RF/FSO system with outdated CSI. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kashani, M.A.; Uysal, M.; Kavehrad, M. A Novel Statistical Channel Model for Turbulence-Induced Fading in Free-Space Optical Systems. J. Light. Technol. 2015, 33, 2303–2312. [Google Scholar] [CrossRef] [Green Version]
- Jurado-Navas, A.; Garrido-Balsells, J.M.; Paris, J.F.; Puerta-Notario, A.; Awrejcewicz, J. A unifying statistical model for atmospheric optical scintillation. Numer. Simul. Phys. Eng. Process. 2011, 181, 181–205. [Google Scholar] [CrossRef] [Green Version]
- Ansari, I.S.; Yilmaz, F.; Alouini, M.S. Performance Analysis of Free-Space Optical Links Over Málaga (M) Turbulence Channels With Pointing Errors. IEEE Trans. Wirel. Commun. 2016, 15, 91–102. [Google Scholar] [CrossRef] [Green Version]
- Ansari, I.S.; Yilmaz, F.; Alouini, M.S. Impact of Pointing Errors on the Performance of Mixed RF/FSO Dual-Hop Transmission Systems. IEEE Wirel. Commun. Lett. 2013, 2, 351–354. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Cheng, J.; Tsiftsis, T.A. Free-Space Optical Communication with Nonzero Boresight Pointing Errors. IEEE Trans. Commun. 2014, 62, 713–725. [Google Scholar] [CrossRef]
- Vu, M.Q.; Pham, T.V.; Dang, N.T.; Pham, A.T. Outage Performance of HAP-UAV FSO Links with Gaussian Beam and UAV Hovering. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Virtual, 18 November–6 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhao, Z.; Xu, G.; Zhang, N.; Zhang, Q. Performance Analysis of the Hybrid Satellite-Terrestrial Relay Network With Opportunistic Scheduling Over Generalized Fading Channels. IEEE Trans. Veh. Technol. 2022, 71, 2914–2924. [Google Scholar] [CrossRef]
- Huang, S.; Safari, M. Free-Space Optical Communication Impaired by Angular Fluctuations. IEEE Trans. Wirel. Commun. 2017, 16, 7475–7487. [Google Scholar] [CrossRef] [Green Version]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. Channel Modeling and Parameter Optimization for Hovering UAV-Based Free-Space Optical Links. IEEE J. Sel. Areas Commun. 2018, 36, 2104–2113. [Google Scholar] [CrossRef] [Green Version]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable Optical Channel Modeling Between UAVs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Al Naboulsi, M.; Sizun, H.; de Fornel, F. Fog attenuation prediction for optical and infrared waves. Opt. Eng. 2004, 43, 319–329. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M.; Romer, R.H. Tables of Integrals, Series, and Products, 6th ed.; Academic: New York, NY, USA, 2000. [Google Scholar]
- Safi, H.; Dargahi, A.; Cheng, J.; Safari, M. Analytical Channel Model and Link Design Optimization for Ground-to-HAP Free-Space Optical Communications. J. Light. Technol. 2020, 38, 5036–5047. [Google Scholar] [CrossRef]
- Qu, L.; Xu, G.; Zeng, Z.; Zhang, N.; Zhang, Q. UAV-Assisted RF/FSO Relay System for Space-Air-Ground Integrated Network: A Performance Analysis. IEEE Trans. Wirel. Commun. 2022, 21, 6211–6225. [Google Scholar] [CrossRef]
- Prudnikov, A.P.; Brychkov, I.A.; Marichev, O.I. Integrals and Series: More Special Functions; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Ansari, I.S.; Yilmaz, F.; Alouini, M.S. Performance Analysis of FSO Links over Unified Gamma-Gamma Turbulence Channels. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Springer, M.D. The Algebra of Random Variables; Siam Review; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1980. [Google Scholar]
- Wolfram, I. Research, Mathematica Edition: Version 8.0. 2010. Available online: http://functions.wolfram.com (accessed on 6 April 2023).
- Lu, R.R.; Wang, J.Y.; Fu, X.T.; Lin, S.H.; Wang, Q.; Zhang, B. Performance analysis and optimization for UAV-based FSO communication systems. Phys. Commun. 2022, 51, 101594. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Name | Value |
|---|---|---|
| Standard deviation of the random displacements of beam centroid and receiver aperture | 0.95 mrad | |
| Visibility-related attenuation coefficient | 1.052 | |
| e | Electron charge | 1.6 × 10−19 C |
| Receiver electrical bandwidth | 1 GHz | |
| Receiver optical bandwidth | 10 nm | |
| Spectral radiance of the background radiations | 0.001 W/cm2-m-srad | |
| Optical wavelength | 1500 nm | |
| Optoelectronic conversion efficiency of the PD | 0.9 | |
| Two parameters that determine the binary modulation method | 0.5, 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, B.; Chen, J.; Xu, G.; Chen, Q.; Wang, J. Performance Analysis of a Drone-Assisted FSO Communication System over Málaga Turbulence under AoA Fluctuations. Drones 2023, 7, 374. https://doi.org/10.3390/drones7060374
Shen B, Chen J, Xu G, Chen Q, Wang J. Performance Analysis of a Drone-Assisted FSO Communication System over Málaga Turbulence under AoA Fluctuations. Drones. 2023; 7(6):374. https://doi.org/10.3390/drones7060374
Chicago/Turabian StyleShen, Bing, Jiajia Chen, Guanjun Xu, Qiushi Chen, and Jian Wang. 2023. "Performance Analysis of a Drone-Assisted FSO Communication System over Málaga Turbulence under AoA Fluctuations" Drones 7, no. 6: 374. https://doi.org/10.3390/drones7060374