
Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges

 ,
,  ,
,  and
and
Abstract
:1. Introduction
- Communication: maintaining communication between the drones in a swarm can be challenging, especially in highly mobile and wide areas. The drones must be able to maintain communication even when they are moving at high speeds or when they are far apart from each other.
- Coordination: coordinating the actions of the UAVs is complex, especially in elaborate missions. To reach a shared purpose, the drones must be able to successfully collaborate.
- Autonomy: the drones must be able to operate autonomously without human intervention. This requires collaborative actions for decision making, navigation, and swarm behavior. Theses challenges include spatial awareness, maintaining a distance from each other, and communicating potential threats to other drones, such as heavy wind gusts, rain, and obstructions.
- Scalability: multi-UAV systems must be able to support a large number of drones, they must be reliable, and they must be able to scale up or down depending on the requirements of the mission.
- Reliability: the system must be reliable, even if one or more UAVs fail. This requires robust algorithms for fault detection, diagnosis, and recovery.
- Interference: in highly dynamic surroundings, drones may encounter interference from other wireless devices, which can affect communication or navigation [18].
- Interoperability: the system must guarantee the exchange of information between different types of drones regardless of their communication protocols. Unfortunately, there is still no common protocol for drones to communicate with each other.
- The field of autonomous swarms is still in its infancy and, as a result, there is a lack of research that consistently provides a formalism of the constraints related to the collaborative actions of multi-UAV systems. In this context, our work has added significant value by filling the gap concerning a well-defined mathematical formulation of collaborative actions of multi-UAV systems in a large distributed environment.
- The study of an autonomous and cooperative drone swarm infrastructure is an incredibly complex field, and there are still very few scientific studies that fully explore the intricacies of how it operates. Due to this lack, we conduct an extensive investigation of multi-UAV infrastructures, which results in a scientific work providing valuable knowledge to answer the question of how to choose the right communication architecture as well as the most suitable routing protocol. This will save a lot of time and avoid erroneous conceptual studies.
- Despite the importance of understanding the collaborative paradigm of autonomous multi-UAV systems for target detection in distributed environments, there is a lack of clear visibility of the challenges and future directions in developing effective collaborative swarm. As added value, we have highlighted the most important challenges and clarified the open perspectives for research in this area.
- 1.
- Types of UAVs: We review existing drones. The UAVs are classified into four categories according to their shape and size.
- 2.
- Problem formulation: We start by identifying the key features that allow us to recognize a multi-UAV ecosystem. We emphasize the complexities and major challenges associated with the collaborative target detection problem. Then, we propose a mathematical formulation of the problems of k-partition of the environment and path planning to reach the targets. The proposed models are based on multi-objective functions that satisfy the constraints of the workload balancing of the swarm and the optimization of the paths.
- 3.
- Architectures and protocols: We give cutting-edge knowledge on multi-UAV communication architectures as well as the existing routing protocols. Then, we evaluate the performance and draw a comparison for each communication architecture and routing protocol listed in this paper.
- 4.
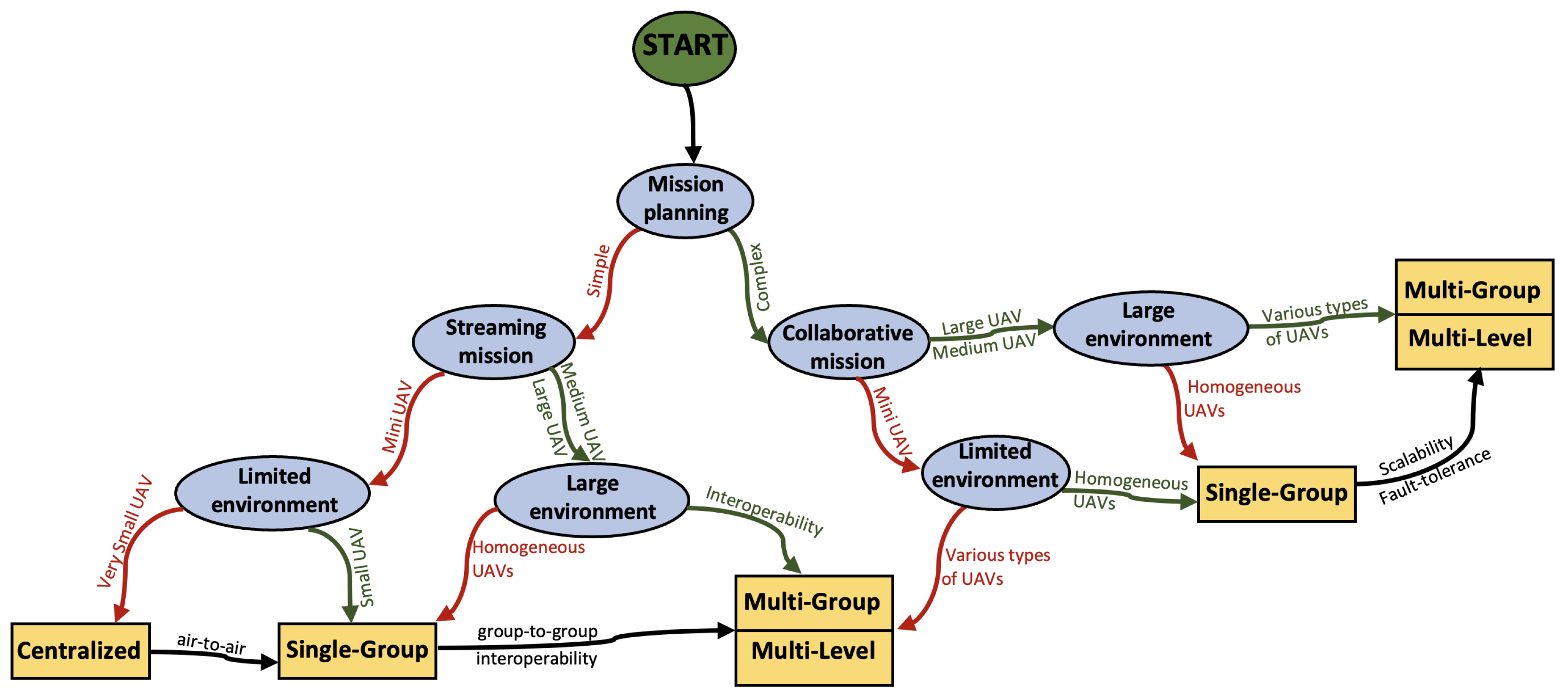
- Suggestions: Based on the comparisons of the existing architectures and routing protocols, we give some suggestions for choosing the right architectures and routing protocols that are tailored to a well-defined mission.
- 5.
- Open challenges: We discuss the ongoing issues and potential future directions, such as collaborative decision making, communication infrastructure, spatial organization, and regulation for multi-UAV deployment.
2. Background
3. Classification of UAVs
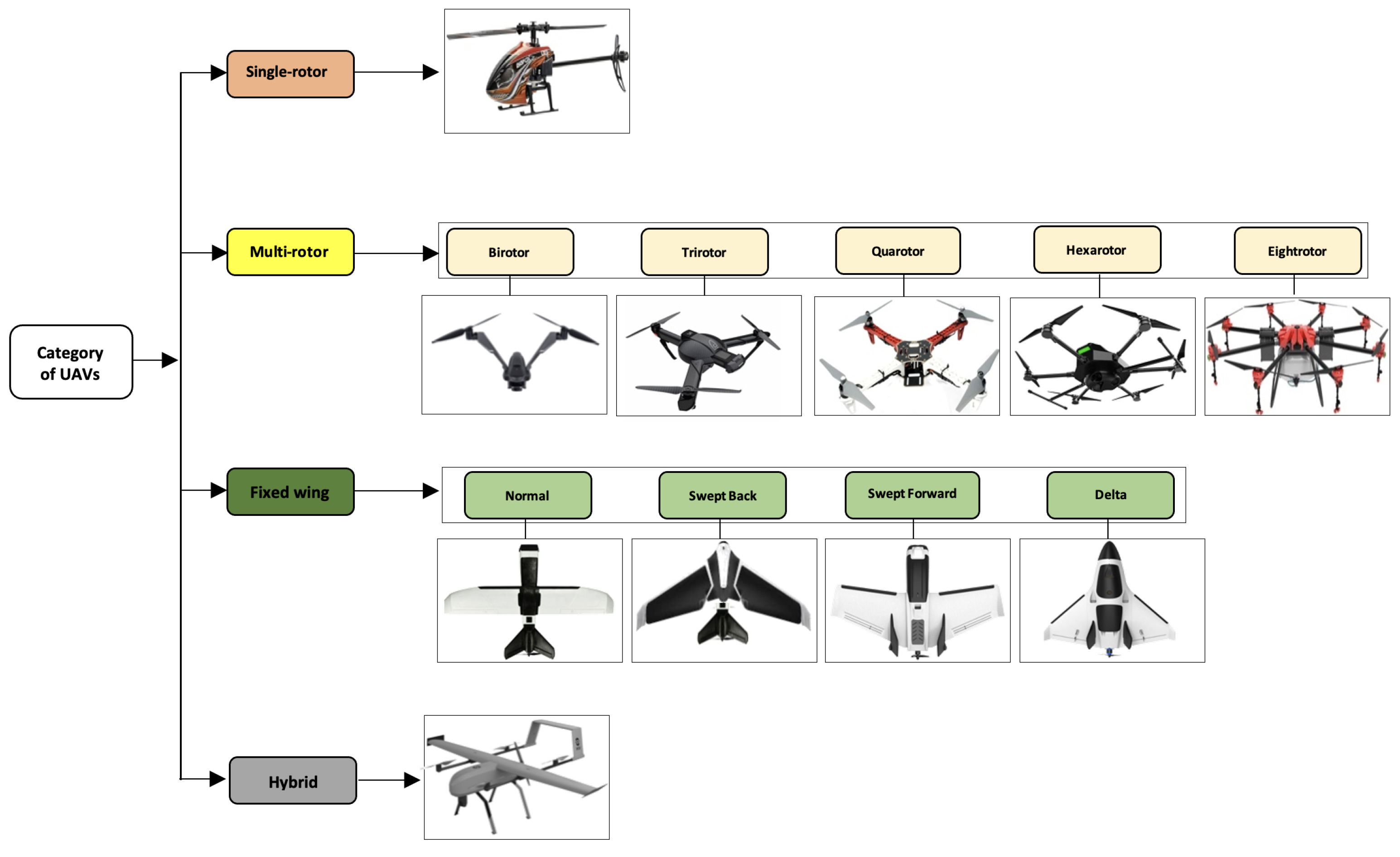
- 1.
- Single-rotor [50] (or helicopter): this category of UAVs takes off and lands vertically. Generally, they use a main rotor for attitude control (roll, pitch, and yaw) and a tail rotor to control the direction. Its main advantage is the ability to carry heavy payloads over a longer flight time. However, the complexity of their mechanical systems, as well as the large size and high cost of the rotors constitute a danger for the uncrewed versions. It is more unstable in bad weather.
- 2.
- Multi-rotor [51] (or multicopter): this is a UAV having more than two rotors. This UAV category is further subdivided into five sub-categories, which are birotor, trirotor, quadrotor, hexarotor, and eight-rotor (octocopter) [13,15]. As with single-rotor UAVs, multi-rotor UAVs also ensure a vertical takeoff and landing. They are fast and agile in flight, allowing them to perform complex maneuvers and flights in confined spaces. However, the short flight time is the main weakness of these types of aircraft.
- 3.
- Fixed-wing [52]: the navigation principle of this category of UAVs is based on a simple structure of a fixed rigid wing. The classification of these drones is not only based on the type of wing, but also on the body and the power system (Li-ion, Li-Po batteries, or gas-powered). They are subdivided into four subcategories: normal, swept back, swept forward, and delta. Furthermore, they can carry heavier payloads than multi-rotors [53]. The disadvantage of these UAVs is that they have limited agility in flight, which does not allow them to perform complex maneuvers and fly over confined spaces, as well as the necessity for a runway for takeoff and landing.
- 4.
- Hybrid [54]: this last category is still under development. It is an improved version that takes advantage of both multi-rotor and fixed-wing UAVs. They offer good agility and velocity on long-distance flights. They can carry large payloads and do not require a runway. The main disadvantages are the high price, the complicated mechanics, and the lower performance in terms of flight stability and the restrictive speed ranges.
4. Problem Statement
4.1. Notations and Formalism
4.1.1. Environment E
- A set of points such as ; the positions of these waypoints are defined by 3D Cartesian coordinates.
- A set of lines that connect the waypoints.
- A weighting function associated with the lines of E, such as and .
4.1.2. Sub-Environment Ei
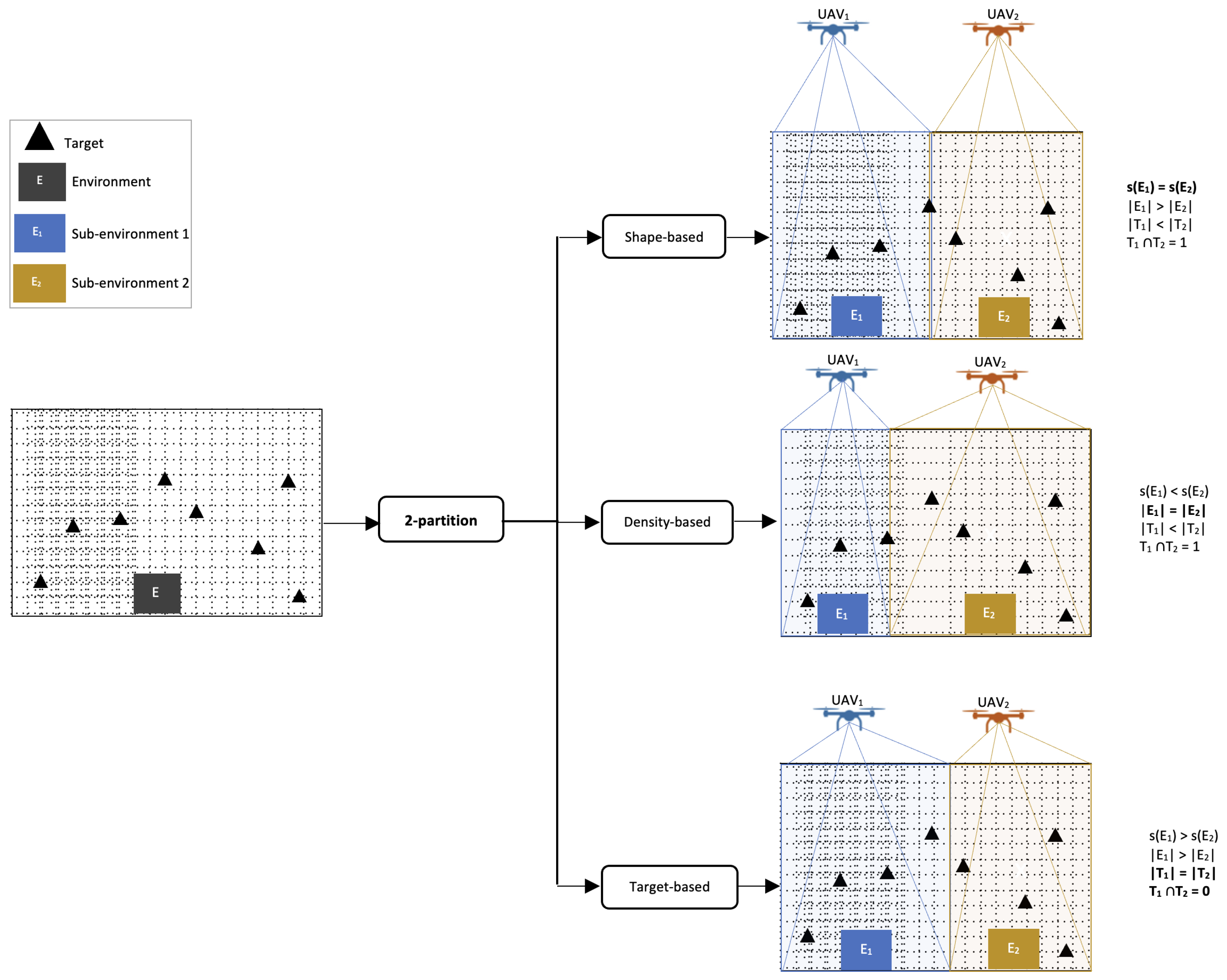
4.1.3. Partition
- .
- such as ; we obtain .
- .
4.1.4. Target T
- , if E contains no target.
- .
- , , if and only if contains at least one target.
- such as , we obtain ⇒ and it contains more targets than .
- such as , we obtain ⇒ and they share common targets.
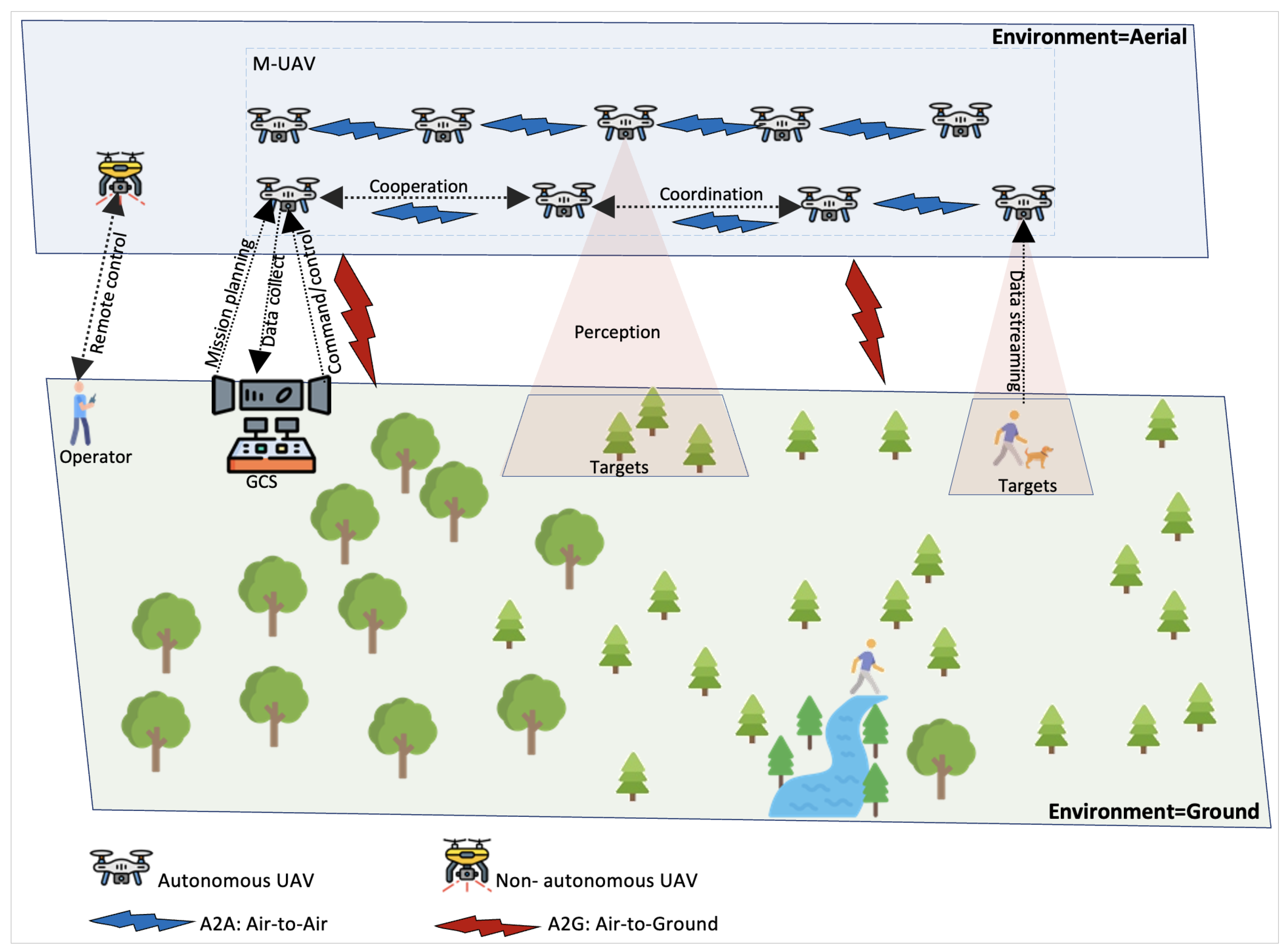
4.1.5. M-UAV
4.1.6. Perception P
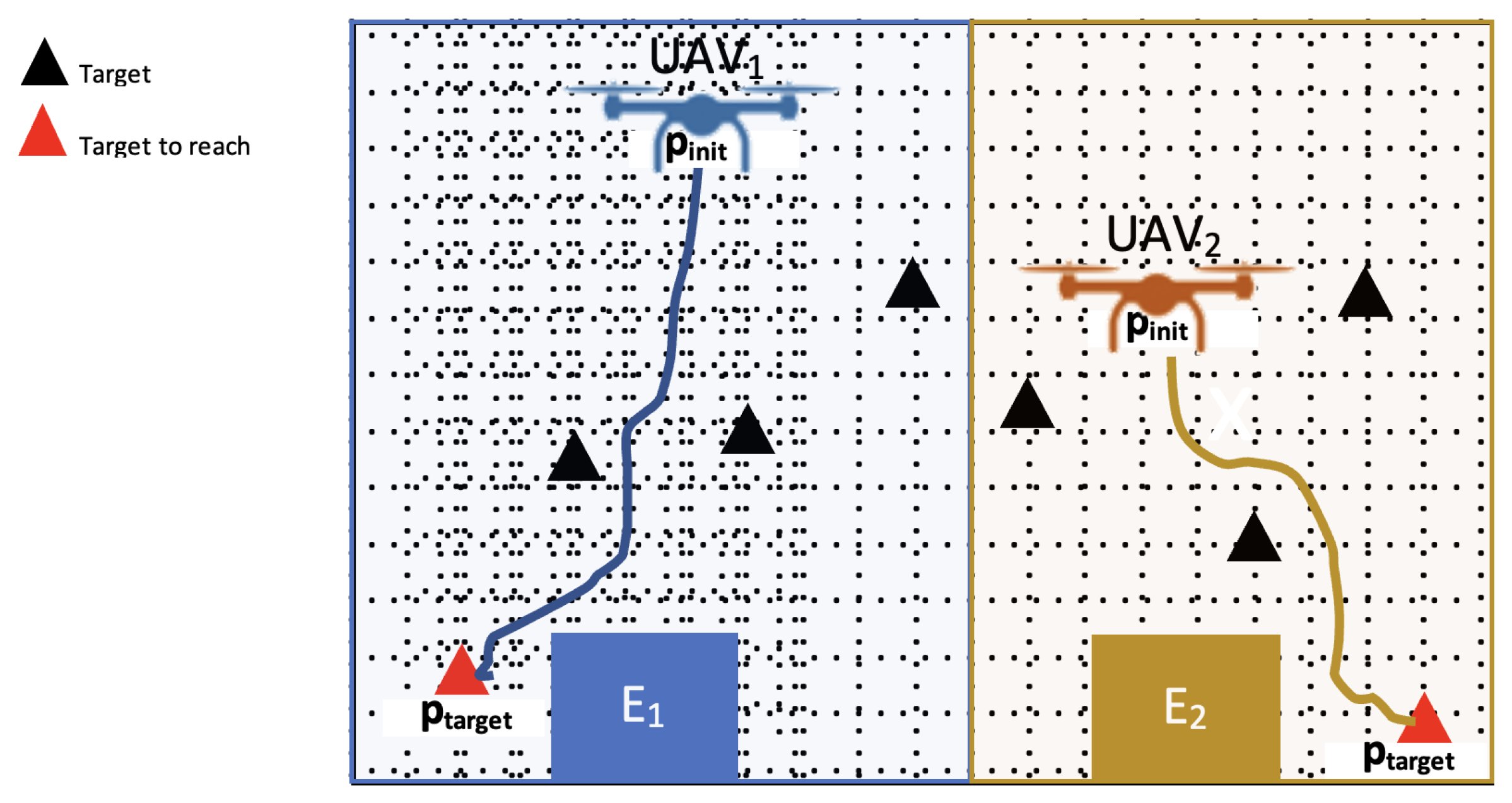
4.2. Collaborative Target Detection Problem
4.2.1. k-Partition Problem
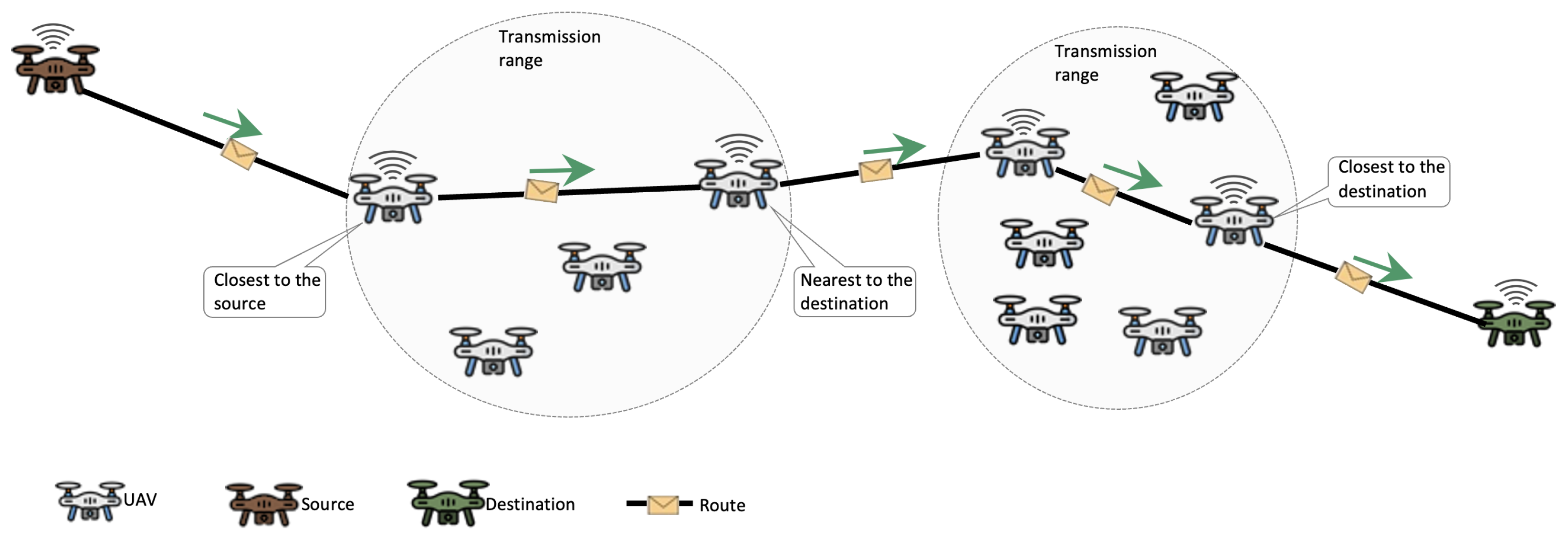
4.2.2. Single-Source Shortest Path Problem (SSSP)
- : the origin point or current position of the drone UAV.
- : the goal point or position of the target .
- .
- path: the path to reach from .
5. State of the Art
5.1. Military
5.2. Surveillance and Reconnaissance
5.3. Payload Carrying
5.4. Exploration
5.5. Other Applications
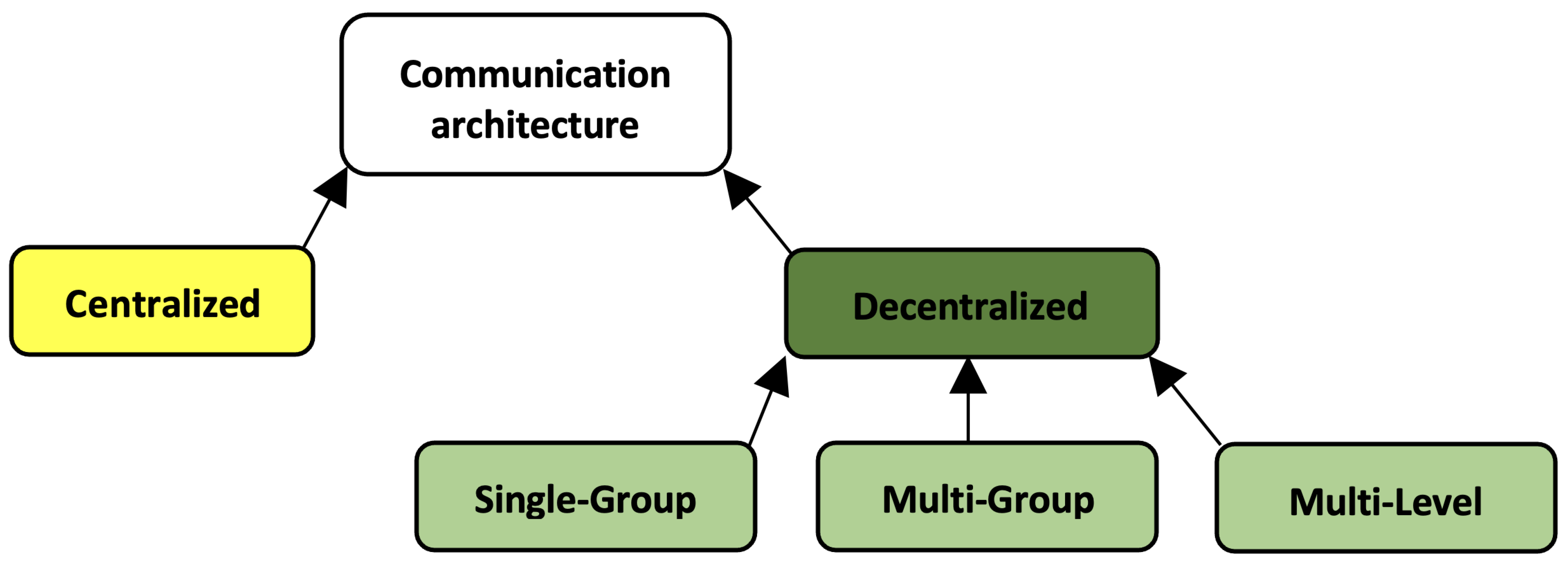
6. Existing Multi-UAV Communication Architectures
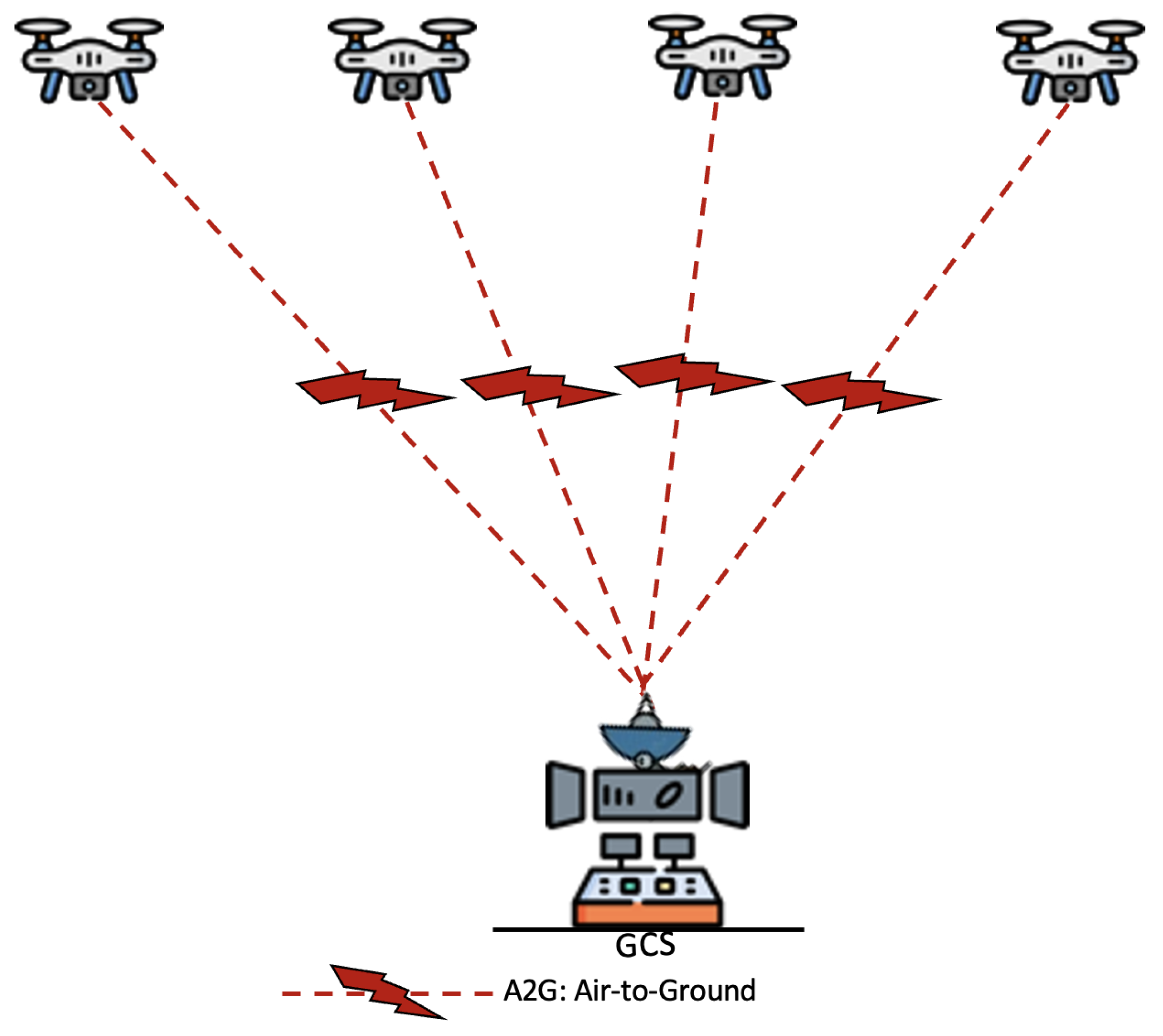
6.1. Centralized Communication Architecture
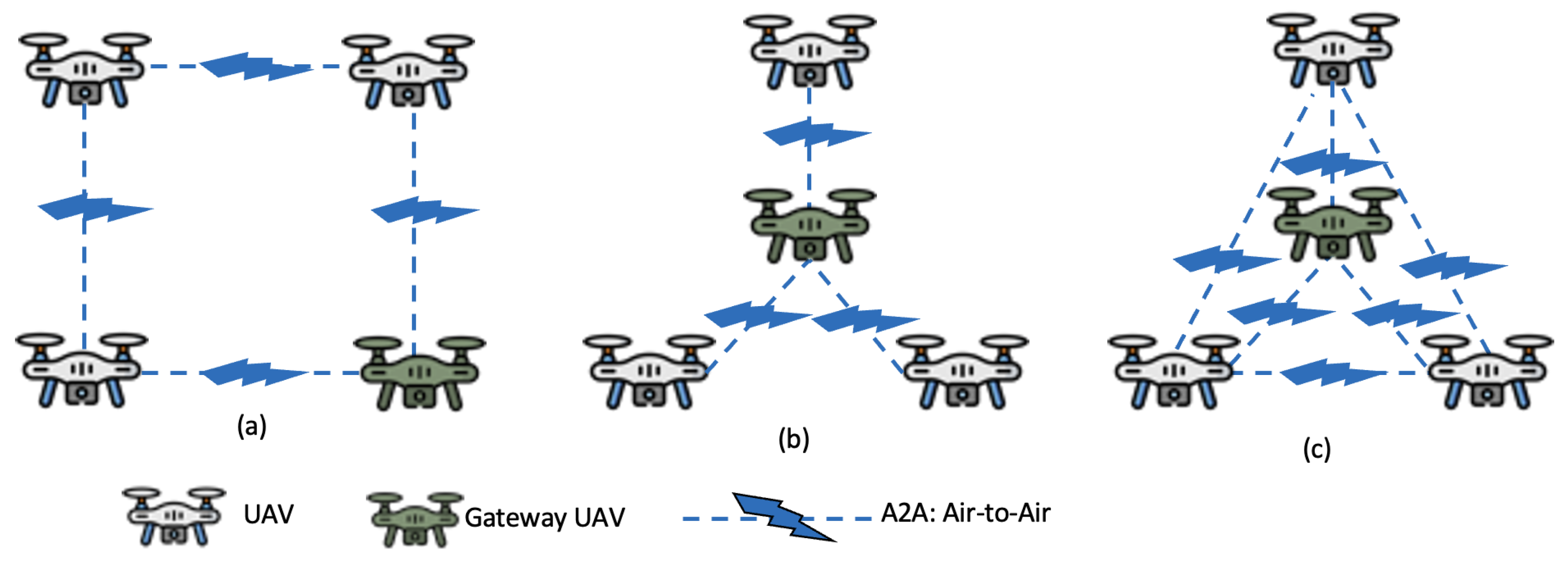
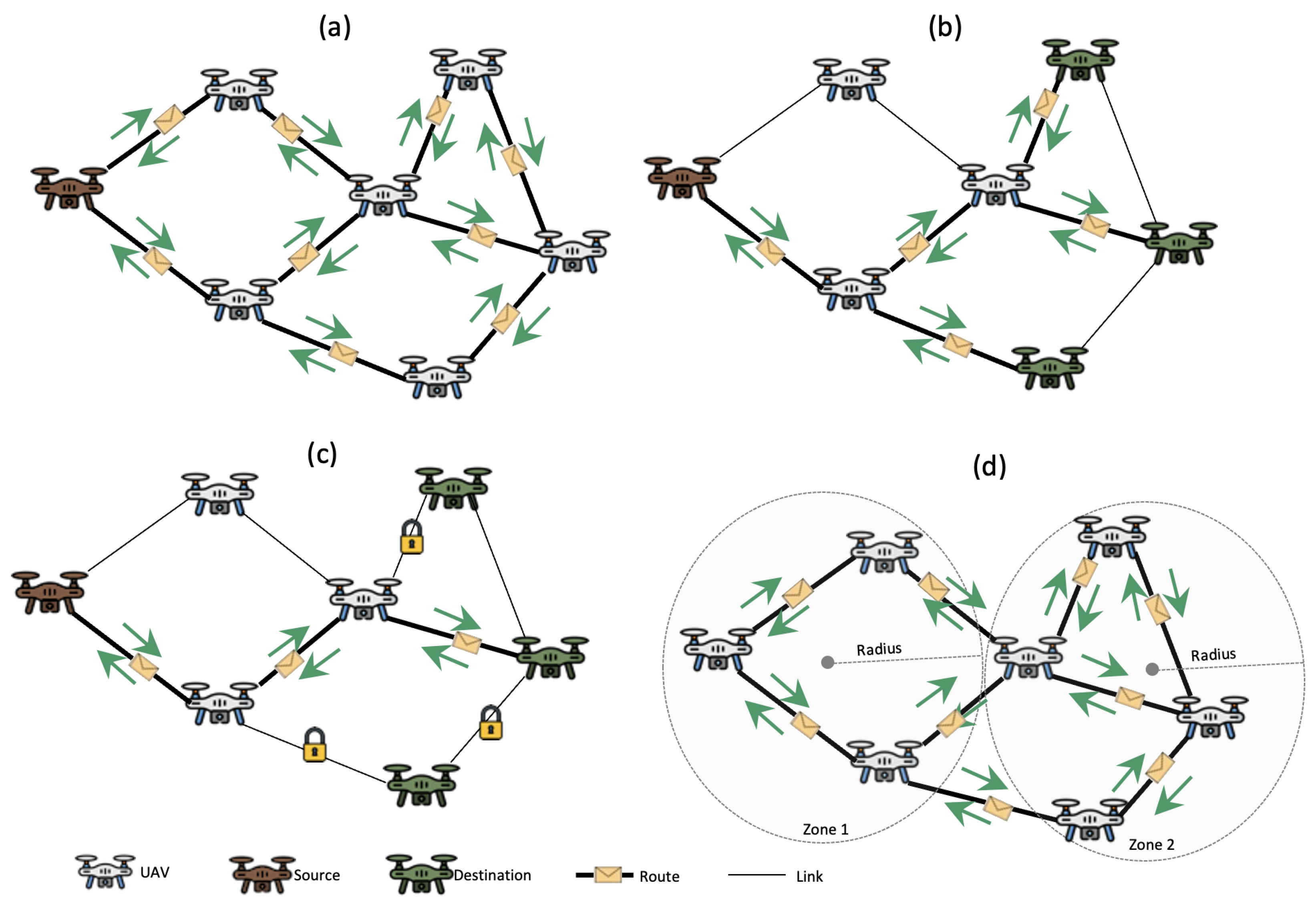
6.2. Single-Group Communication Architecture
- 1.
- Ring: in an intra-UAV communication-based ring topology, the UAVs communicate in a bidirectional loop in a closed network. To guarantee the high availability of the information, any UAV can be used as a gateway to relay the information between the GCS and the rest of the UAVs. On the other hand, it is difficult to maintain the scalability of the UAVs because of the network topology.
- 2.
- Star: in a star topology, a single UAV relays information from the GCS infrastructure and shares it with the others. Any communication between two UAVs must pass through the gateway UAV. It is easy to maintain scalability. However, it does not guarantee fault tolerance because, if the gateway UAV fails, the whole system stops.
- 3.
- Meshed: it takes advantage of the ring and star topologies. It allows us to guarantee both scalability and fault tolerance.
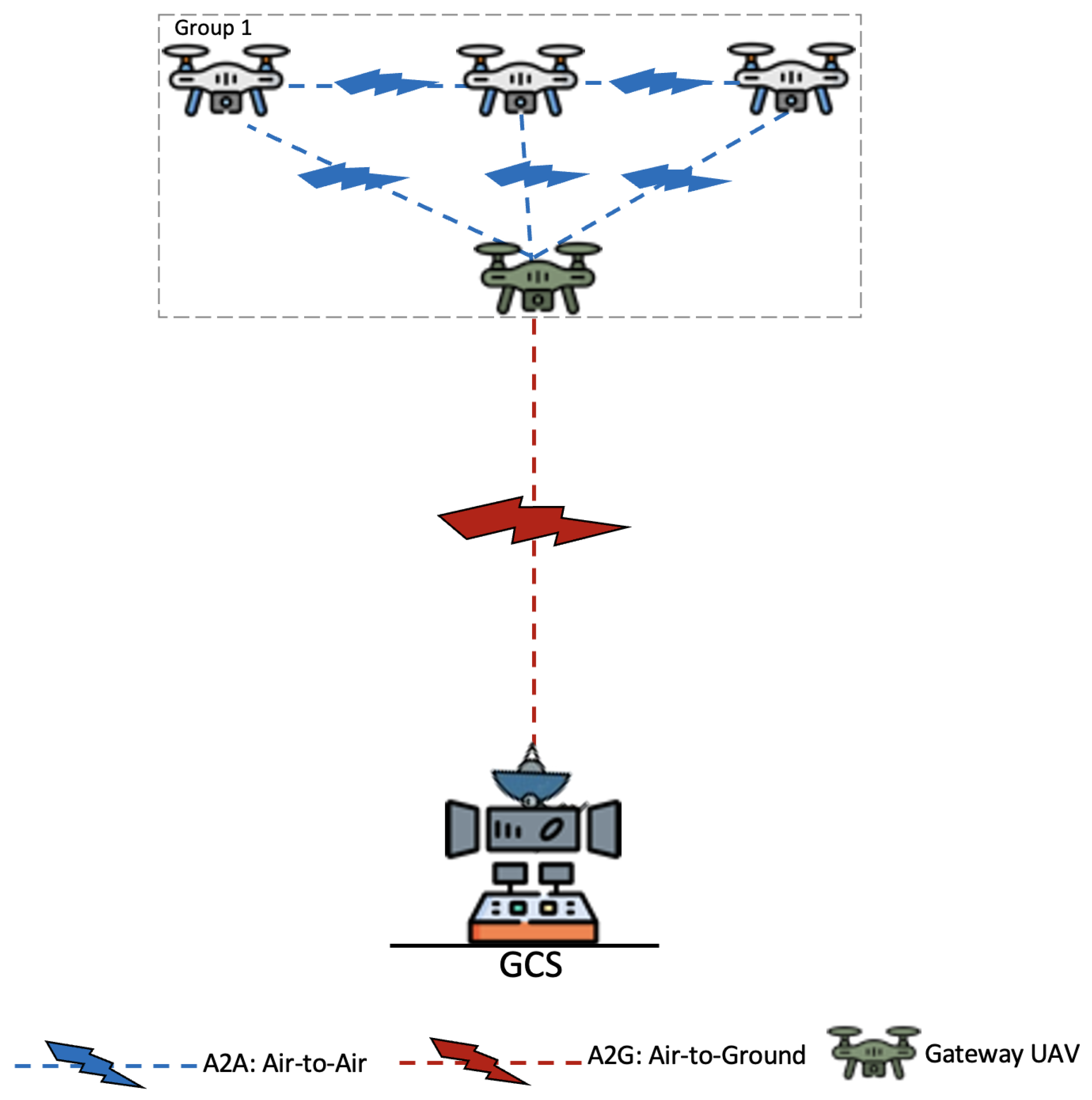
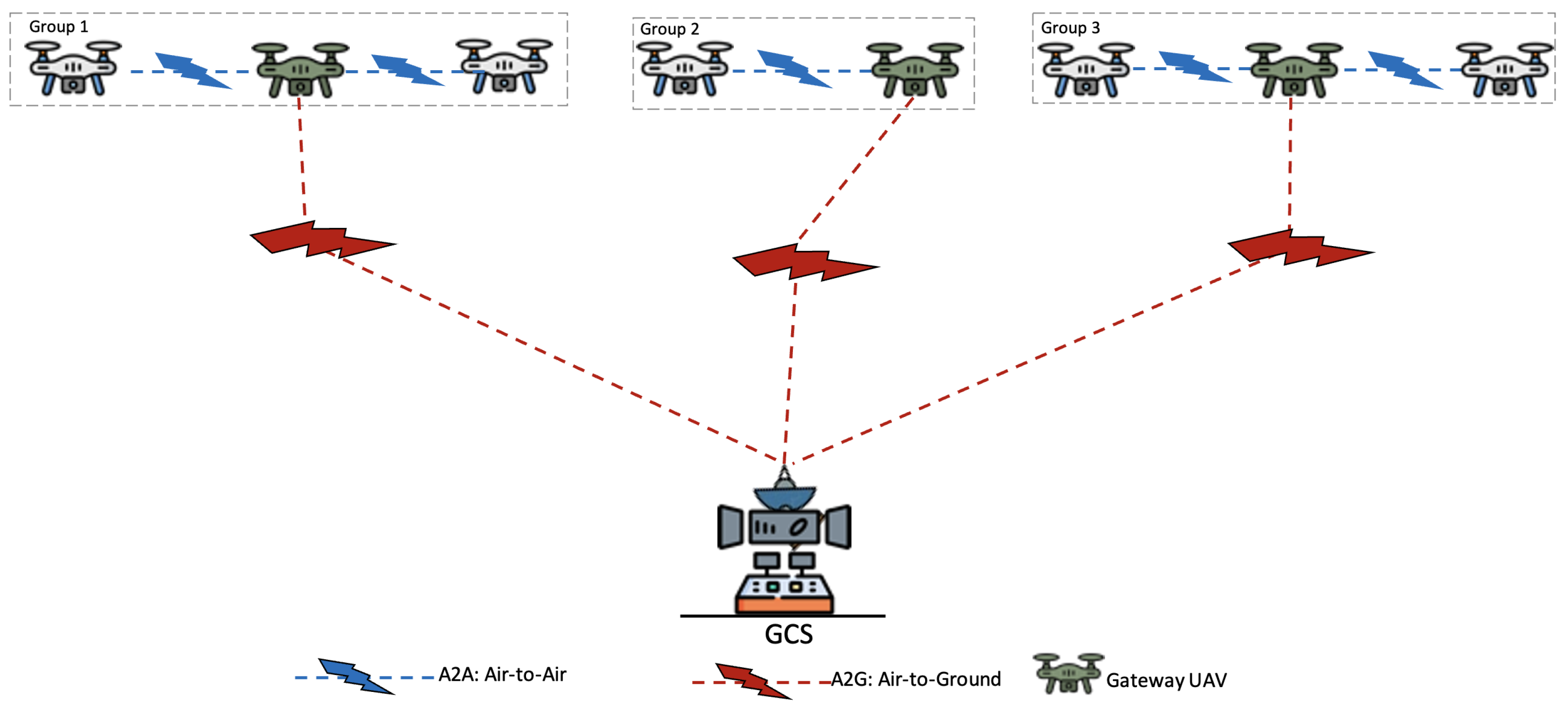
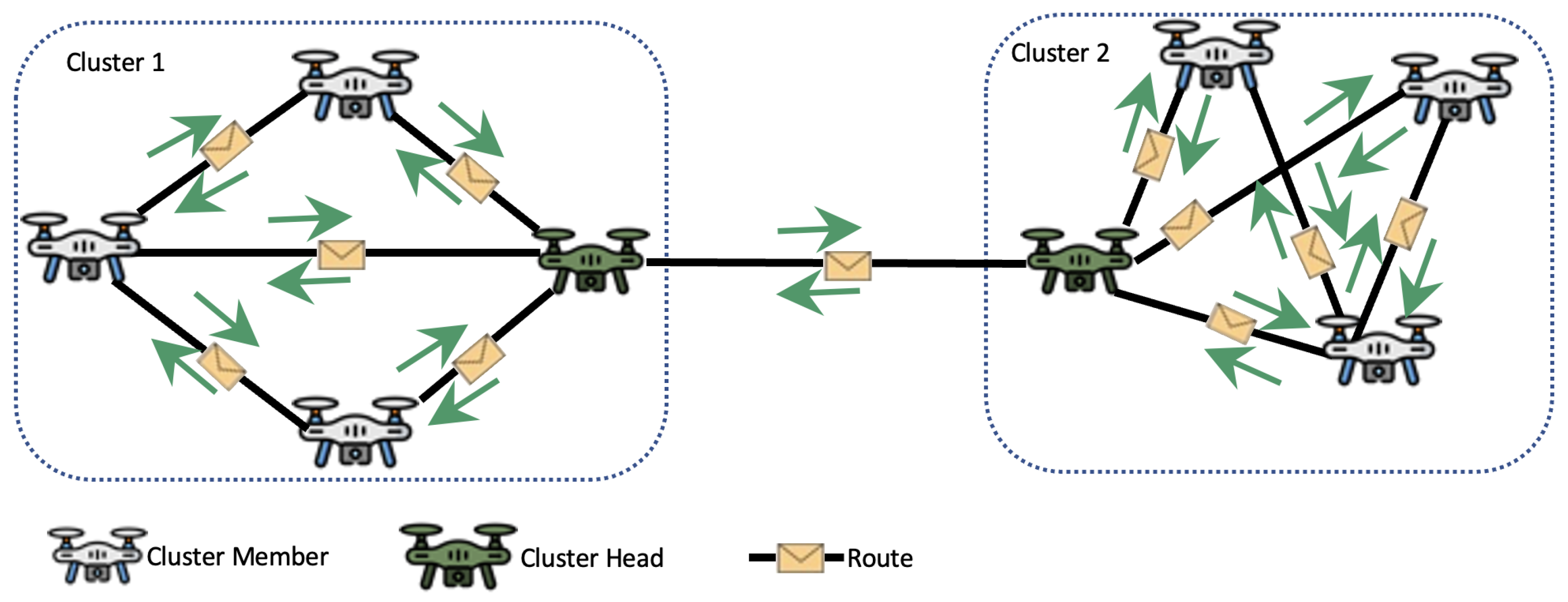
6.3. Multi-Group Communication Architecture
- Single point of failure: if the gateway UAV fails, then all other UAVs in its group remain inactive. If the GCS fails, then the system will become totally paralyzed.
- Homogeneity of UAVs: in a group, the UAVs must be of the same type, and this is a hindrance for some missions. Moreover, this implies serious interoperability problems between groups of UAVs.
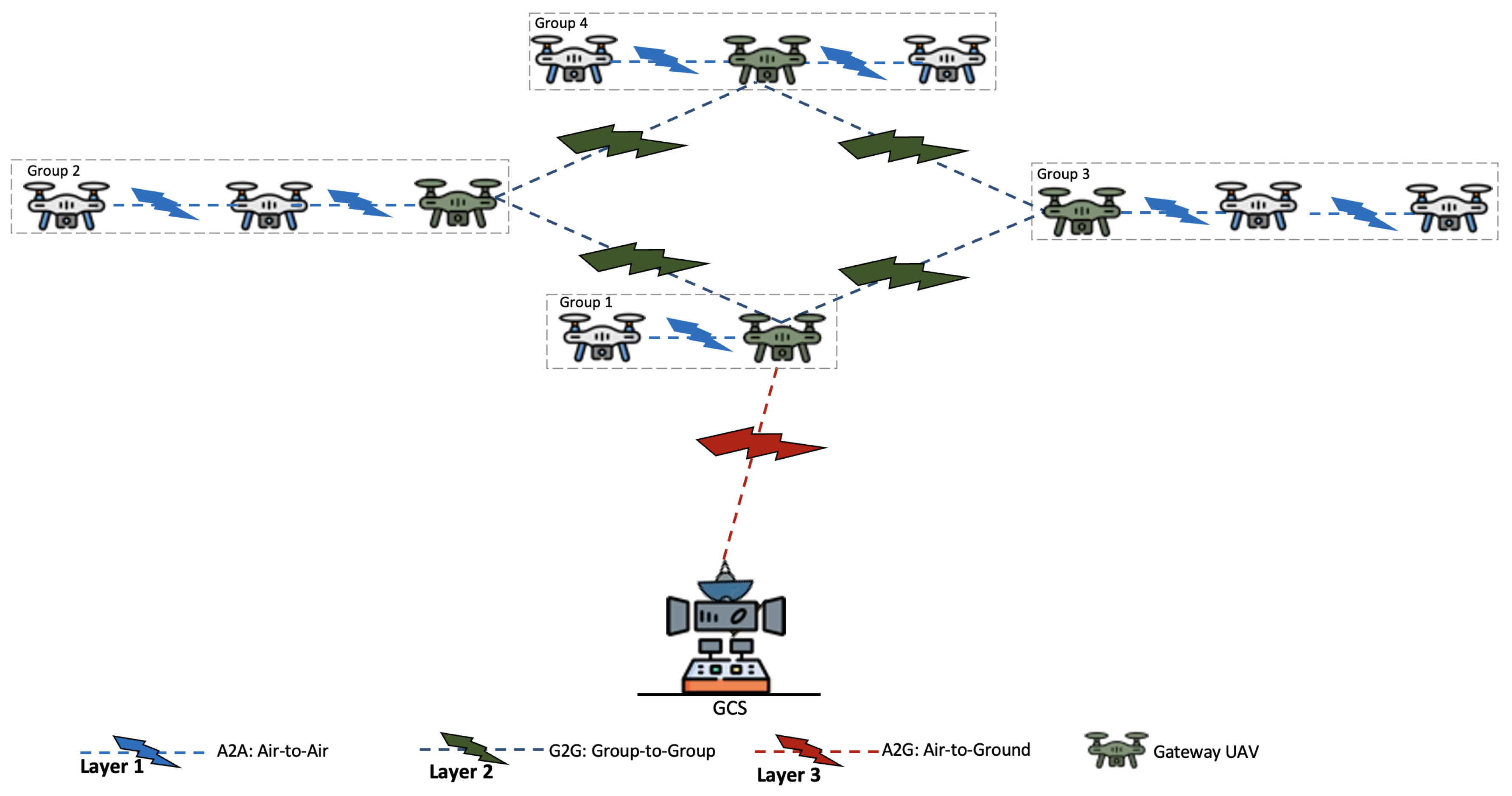
6.4. Multi-Level Communication Architecture
- 1.
- Layer 1 (A2A) is adapted for UAV-to-UAV communication. It allows the intra-communication of a group of adjacent UAVs according to the three network topologies seen in Section 6.2.
- 2.
- Layer 2 (G2G) is suitable for group-to-group communication. It is responsible for the inter-communication of groups of UAVs. Each group of UAVs uses its gateway UAV to communicate with the adjacent groups. Moreover, this communication is done directly, without using the GCS network infrastructure.
- 3.
- Layer 3 (G2A) is suited to ground-to-air communication. It allows us to relay bidirectional information between the GCS and the UAV groups. Generally, this is done through the UAV gateway closest to the GCS infrastructure.
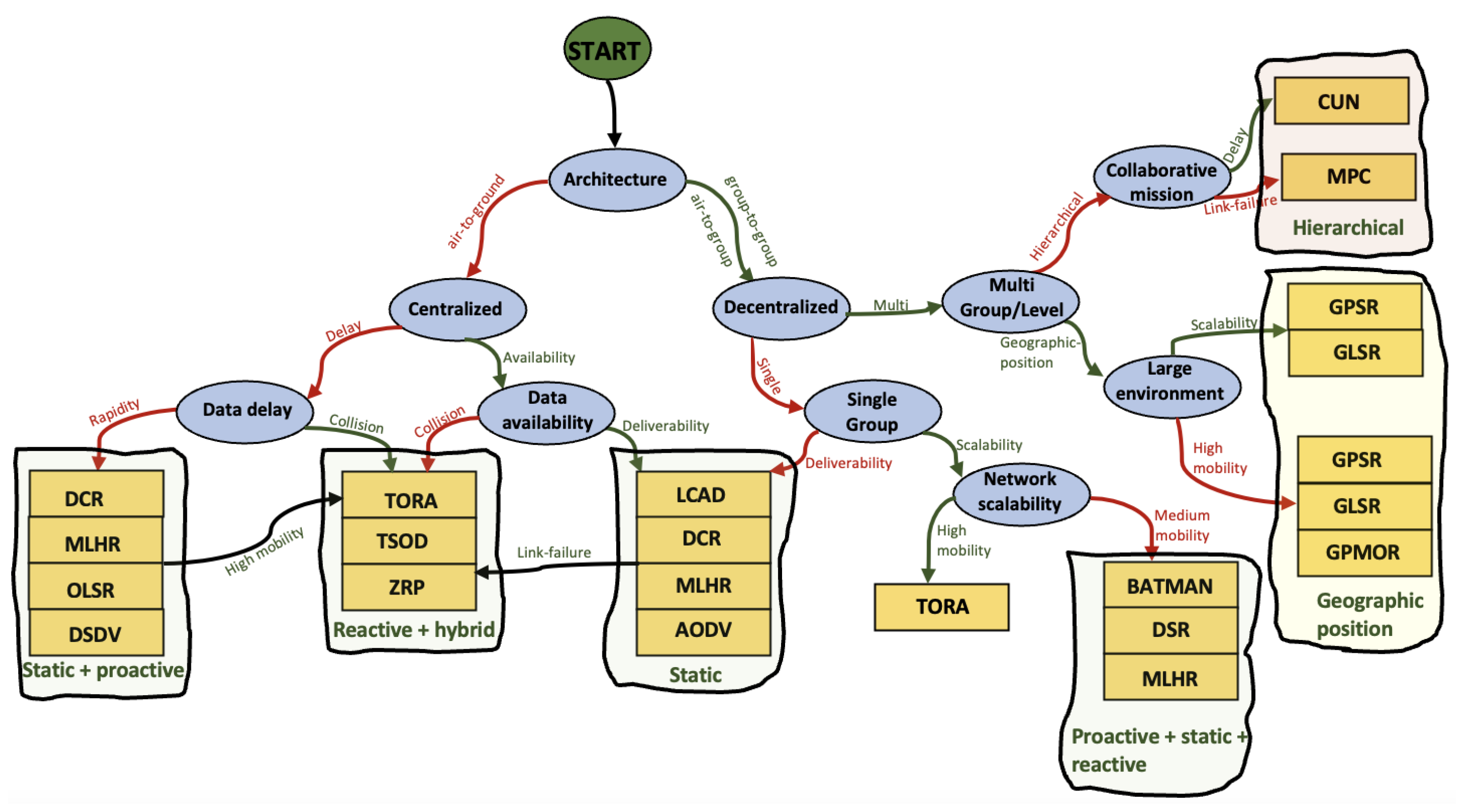
7. Comparison and Roadmap of Multi-UAV Architectures
8. Routing Protocols of Multi-UAV Systems
8.1. Topology-Based Routing Protocols
8.1.1. Static
8.1.2. Proactive
8.1.3. Reactive
8.1.4. Hybrid
8.2. Geographic Position-Based Routing Protocols
8.3. Hierarchical-Based Routing Protocols
9. Comparison and Roadmap of Routing Protocols
10. Open Challenges and Future Directions
10.1. Collaborative Decision Making
- Definition of a consensus on which the UAVs base themselves to carry out individual actions that contribute to a convergence towards a common goal.
- Task allocation, which consists in dynamically assigning tasks according to the state and capacity of the UAVs. To allow a high level of parallelism, tasks can be distributed fairly if the UAVs are homogeneous. Otherwise, it will be done according to the workload and computing resources of each UAV. It should also be noted that the assignment of tasks is based on a parallelism paradigm (synchronous parallelism, asynchronous parallelism, or bulk synchronous parallelism) that ensures that the tasks are executed concurrently.
- Collective failure detection in the swarm makes it possible to detect the UAVs that have abnormal behavior, or that carry out actions that do not contribute to the realization of the mission. For example, due to a hardware malfunction (e.g., low battery or defective rotor), a UAV may not respond appropriately to some tasks assigned to it. The collective management of the failures in the swarm must make it possible to detect the UAVs whose behavior does not contribute to the progress of the mission. It is also necessary to consider an activity continuity plan that allows the other UAVs to continue the mission and to adapt to any type of change.
- Perception of the environment represents the information collected by the UAV. Each UAV uses onboard sensors to build a local representation of the environment. The combined set of perceptions allows the swarm to build a global representation and make more predictive decisions. For example, to calculate the most optimal path that reaches a target, we can choose the closest drone. See Section 4.2.2 for more details.
- The deployment of a swarm using a multi-agent-based model for better coordinating the actions and interactions of the drones to enhance the individual and/or collective decision making.
- The implementation of a reinforcement learning algorithm on each drone to control its behavior based on the reward of good actions.
10.2. Communication Infrastructure
- The development of a protocol converter that allows us to convert a given FANET protocol into a desired protocol in order to ensure interoperability between non-homogeneous UAVs.
- The standardization of UAV communication rules in order to evolve towards a reference model used by manufacturers as well as end users.
10.3. Collective Navigation
10.4. Energy Consumption
- The optimization of the coverage paths in order to reduce considerably the power consumption of the UAVs. This problem consists in finding the optimal paths that maximize the number of covered waypoints in a network while minimizing both energy costs and emissions [12,49]. A concrete application of this problem is the drone delivery operation, which consists in serving all the delivery waypoints without passing twice by the same point [38]. It is a multi-criteria optimization problem [58] that consists in determining the best energy consumption model that optimizes both the path cost, the energy consumed, and the emissions associated with the delivery strategy.
- The efficient planning of the collaborative tasks of the swarm. In a multi-UAV system, the tasks are running concurrently and in a parallel way to achieve a common goal. The UAVs share a large amount of information synchronously or asynchronously in the network for waypoint generation, map reconstruction, and collision avoidance [24,40]. These tasks are memory-intensive and also consume a significant amount of energy resources related to the communication system [36].
- The maintenance of the battery is another problem that affects the flight times of UAVs as the batteries used have a very limited lifespan [35,41]. It allows us to improve the battery life cycle and to extend its duration of use. Furthermore, this is one of the effective alternatives to have a battery considered safer and with a longer life cycle [35]. However, this task is complex because there is no exact method to determine the life of a battery and each type of UAV has its own maintenance pattern [42]. There are numerous factors affecting the life of the battery that must be considered, such as the amperage, voltage, temperature, type of charger, and charge/discharge cycles [37].
- The design of energy-efficient trajectory-based reinforcement learning, which allows us to generate an adaptive path. Each UAV acts as an autonomous agent that readjusts its trajectory, speed, acceleration, and altitude to maximize energy gains. Moreover, it reinforces its adaptive capacity by using a multi-objective function that rewards the actions that minimize the cost of its path, its energy consumption, and its emissions. Some recent examples were presented in [36,40].
- The optimization of the UAV flight tour inspired by combinatorial optimization and the integer programming problem, in which, starting from the launch position of the UAV, we try to find an optimal set of paths that the swarm must traverse in order to return to its initial position. This is a problem of NP-Hard complexity [12,49,59] because we cannot pass twice through the same waypoint. Moreover, this problem becomes even more complex when we add the constraints of energy consumption and emissions. Typical examples were presented by Dorling et al. [39] and Febria et al. [12] for drone delivery services.
- A novel energy harvester for powering UAVs that will allow the possible recharge of an ultra-fast rechargeable battery onboard a UAV and an improvement in the lifespan. A research work conducted in this direction has been proposed in [35] and the analytical results show possible flight time improvements in the range of 3 to 16 min, depending on the flight conditions. In terms of energy usage, it appears that decreasing the UAV size and payload weight may be more important than communication methods for enhanced energy efficiency.
10.5. Regulation
11. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Uncrewed Aerial Vehicle |
| UAS | Uncrewed Aircraft System |
| RPA | Remotely Piloted Aircraft |
| RPAS | Remotely Piloted Aircraft System |
| M-UAV | Multi Uncrewed Aerial Vehicle |
| VTOL | Vertical Takeoff and Landing |
| IoT | Internet of Things |
| AI | Artificial Intelligence |
| MANET | Mobile Ad-Hoc Network |
| VANET | Vehicular Ad-Hoc Network |
| FANET | Flying Ad-Hoc Network |
| RC | Remote Controller |
| GCS | Ground Control Station |
| A2A | Air to Air |
| G2G | Group to Group |
| A2G | Air to Ground |
| OLSC | Oriented Line Segment Coverage |
| LCAD | Load Carry And Deliver |
| DCR | Data-Centric Routing |
| MLHR | Multi-Level Hierarchical Routing |
| OLSR | Optimized Link State Routing |
| DSDV | Destination Sequence Distance Vector |
| BATMAN | Better Approach to Mobile Ad-Hoc Network |
| DSR | Dynamic Source Routing |
| AODV | Ad-Hod On-Demand Vector |
| TSOD | Time-Slotted On-Demand |
| ZRP | Zone Routing Protocol |
| TORA | Temporarily Ordered Routing Algorithm |
| GPSR | Greedy Perimeter Stateless Routing |
| GLSR | Geographic Load Share Routing |
| GPMOR | Geographic Position Mobility-Oriented Routing |
| RGR | Reactive Greedy Reactive |
| CAN | Clustering Algorithm for Networking |
| MPC | Mobility Prediction Clustering |
| IMU | Inertial Measurement Unit |
References
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Lachow, I. The upside and downside of swarming drones. Bull. At. Sci. 2017, 73, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Scharre, P. Robotics on the Battlefield Part II: The Coming Swarm; Technical Report; Center for a New American Security: Washington, DC, USA, 2014. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Thiele, S.T.; Varley, N.; James, M.R. Thermal photogrammetric imaging: A new technique for monitoring dome eruptions. J. Volcanol. Geotherm. Res. 2017, 337, 140–145. [Google Scholar] [CrossRef] [Green Version]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. UAV-GCS Centralized Data-Oriented Communication Architecture for Crowd Surveillance Applications. In Proceedings of the 2019 15th International Wireless Communications and Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; IEEE: Tangier, Morocco, 2019; pp. 2064–2069. [Google Scholar] [CrossRef]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H.; Rinner, B. An Autonomous Multi-UAV System for Search and Rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, DroNet ’15, Florence, Italy, 18 May 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 33–38. [Google Scholar] [CrossRef]
- Adamopoulos, E.; Rinaudo, F. UAS-Based Archaeological Remote Sensing: Review, Meta-Analysis and State-of-the-Art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Patel, M.; Bandopadhyay, A.; Ahmad, A. Collaborative Mapping of Archaeological Sites Using Multiple UAVs. In Proceedings of the Intelligent Autonomous Systems 16; Ang, M.H., Jr., Asama, H., Lin, W., Foong, S., Eds.; Lecture Notes in Networks and Systems; Springer International Publishing: Cham, Switzerland, 2022; pp. 54–70. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Goodrich, P.; Betancourt, O.; Arias, A.C.; Zohdi, T. Placement and drone flight path mapping of agricultural soil sensors using machine learning. Comput. Electron. Agric. 2023, 205, 107591. [Google Scholar] [CrossRef]
- Febria, J.; Dewi, C.; Mailoa, E. Comparison of Capacitated Vehicle Routing Problem Using Initial Route and Without Initial Route for Pharmaceuticals Distribution. In Proceedings of the 2021 2nd International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 23–25 September 2021; pp. 94–98. [Google Scholar] [CrossRef]
- Mellinger, D.; Shomin, M.; Michael, N.; Kumar, V. Cooperative Grasping and Transport Using Multiple Quadrotors. In Distributed Autonomous Robotic Systems: The 10th International Symposium; Martinoli, A., Mondada, F., Correll, N., Mermoud, G., Egerstedt, M., Hsieh, M.A., Parker, L.E., Støy, K., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 545–558. [Google Scholar] [CrossRef]
- Ritz, R.; D’Andrea, R. Carrying a flexible payload with multiple flying vehicles. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Tokyo, Japan, 2013; pp. 3465–3471. [Google Scholar] [CrossRef]
- Loianno, G.; Kumar, V. Cooperative Transportation Using Small Quadrotors Using Monocular Vision and Inertial Sensing. IEEE Robot. Autom. Lett. 2018, 3, 680–687. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Stan, A.C. A decentralised control method for unknown environment exploration using Turtlebot 3 multi-robot system. In Proceedings of the 2022 14th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Ploiesti, Romania, 30 June–1 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; Gupta, T.; Kim, J.; You, I. Internet of Drones (IoD): Threats, Vulnerability, and Security Perspectives. Res. Briefs Inf. Commun. Technol. Evol. 2018, 4, 64–77. [Google Scholar]
- Al-Emadi, S.; Al-Mohannadi, A. Towards Enhancement of Network Communication Architectures and Routing Protocols for FANETs: A Survey. In Proceedings of the 2020 3rd International Conference on Advanced Communication Technologies and Networking (CommNet), Marrakech, Morocco, 4–6 September 2020; IEEE: Marrakech, Morocco, 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Agrawal, J.; Kapoor, M. A comparative study on geographic-based routing algorithms for flying ad-hoc networks. Concurr. Comput. Pract. Exp. 2021, 33, e6253. [Google Scholar] [CrossRef]
- Rizwan Ghori, M.; Safa Sadiq, A.; Ghani, A. VANET Routing Protocols: Review, Implementation and Analysis. J. Phys. Conf. Ser. 2018, 1049, 012064. [Google Scholar] [CrossRef] [Green Version]
- Hogie, L.; Bouvry, P.; Guinand, F. An Overview of MANETs Simulation. Electron. Notes Theor. Comput. Sci. 2006, 150, 81–101. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef] [Green Version]
- Digulescu, A.; Despina-Stoian, C.; Stănescu, D.; Popescu, F.; Enache, F.; Ioana, C.; Rădoi, E.; Rîncu, I.; Șerbănescu, A. New Approach of UAV Movement Detection and Characterization Using Advanced Signal Processing Methods Based on UWB Sensing. Sensors 2020, 20, 5904. [Google Scholar] [CrossRef] [PubMed]
- Jabbar, R.; Dhib, E.; ben Said, A.; Krichen, M.; Fetais, N.; Zaidan, E.; Barkaoui, K. Blockchain technology for intelligent transportation systems: A systematic literature review. IEEE Access 2022, 10, 20995–21031. [Google Scholar] [CrossRef]
- Ahmadzadeh, A.; Jadbabaie, A.; Kumar, V.; Pappas, G.J. Multi-UAV Cooperative Surveillance with Spatio-Temporal Specifications. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; IEEE: San Diego, CA, USA, 2006; pp. 5293–5298. [Google Scholar] [CrossRef] [Green Version]
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial Swarms: Recent Applications and Challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef]
- Khalil, H.; Rahman, S.U.; Ullah, I.; Khan, I.; Alghadhban, A.J.; Al-Adhaileh, M.H.; Ali, G.; ElAffendi, M. A UAV-Swarm-Communication Model Using a Machine-Learning Approach for Search-and-Rescue Applications. Drones 2022, 6, 372. [Google Scholar] [CrossRef]
- Petrlik, M.; Vonasek, V.; Saska, M. Coverage optimization in the Cooperative Surveillance Task using Multiple Micro Aerial Vehicles. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; IEEE: Bari, Italy, 2019; pp. 4373–4380. [Google Scholar] [CrossRef]
- Perez, D.; Maza, I.; Caballero, F.; Scarlatti, D.; Casado, E.; Ollero, A. A Ground Control Station for a Multi-UAV Surveillance System: Design and Validation in Field Experiments. J. Intell. Robot. Syst. 2013, 69, 119–130. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M. Communication and Autonomous Control of Multi-UAV System in Disaster Response Tasks. In Agent and Multi-Agent Systems: Technology and Applications; Jezic, G., Kusek, M., Chen-Burger, Y.H.J., Howlett, R.J., Jain, L.C., Eds.; Series Title: Smart Innovation, Systems and Technologies; Springer International Publishing: Cham, Switzerland, 2018; Volume 74, pp. 123–132. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV Systems: A Survey. Unmanned Syst. 2020, 08, 149–169. [Google Scholar] [CrossRef]
- Maza, I.; Ollero, A.; Casado, E.; Scarlatti, D. Classification of Multi-UAV Architectures. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 953–975. [Google Scholar] [CrossRef]
- Krichen, M.; Adoni, W.Y.H.; Mihoub, A.; Alzahrani, M.Y.; Nahhal, T. Security Challenges for Drone Communications: Possible Threats, Attacks and Countermeasures. In Proceedings of the 2022 2nd International Conference of Smart Systems and Emerging Technologies (SMARTTECH), Riyadh, Saudi Arabia, 9–11 May 2022; pp. 184–189. [Google Scholar]
- Citroni, R.; Di Paolo, F.; Livreri, P. A Novel Energy Harvester for Powering Small UAVs: Performance Analysis, Model Validation and Flight Results. Sensors 2019, 19, 1771. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hajijamali Arani, A.; Azari, M.M.; Hu, P.; Zhu, Y.; Yanikomeroglu, H.; Safavi-Naeini, S. Reinforcement Learning for Energy-Efficient Trajectory Design of UAVs. IEEE Internet Things J. 2022, 9, 9060–9070. [Google Scholar] [CrossRef]
- Chen, Y.; Baek, D.; Bocca, A.; Macii, A.; Macii, E.; Poncino, M. A Case for a Battery-Aware Model of Drone Energy Consumption. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turino, Italy, 7–11 October 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, J.; Campbell, J.F.; Sweeney II, D.C.; Hupman, A.C. Energy consumption models for delivery drones: A comparison and assessment. Transp. Res. Part D Transp. Environ. 2021, 90, 102668. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Chethan, R.; Kar, I. Multi-Agent Coverage Path Planning using a Swarm of Unmanned Aerial Vehicles. In Proceedings of the 2022 IEEE 19th India Council International Conference (INDICON), Kochi, India, 24–26 November 2022. [Google Scholar] [CrossRef]
- Zhang, S.; Cheng, T. Optimizing Energy Consumption of Rotor UAV by Path Planning. In Proceedings of the 2022 Global Conference on Robotics, Artificial Intelligence and Information Technology (GCRAIT), Chicago, IL, USA, 30–31 July 2022; pp. 54–58. [Google Scholar] [CrossRef]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as Mobile Infrastructure: Addressing Battery Lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef] [Green Version]
- Pasek, P.; Kaniewski, P. A review of consensus algorithms used in Distributed State Estimation for UAV swarms. In Proceedings of the 2022 IEEE 16th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 22–26 February 2022; pp. 472–477. [Google Scholar] [CrossRef]
- Safavi, S.; Khan, U.A. Dynamic leader-follower algorithms in mobile multi-agent networks. In Proceedings of the 2015 IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 10–13. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An Overview of Recent Progress in the Study of Distributed Multi-Agent Coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef] [Green Version]
- Kanellakis, C.; Nikolakopoulos, G. Survey on Computer Vision for UAVs: Current Developments and Trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef] [Green Version]
- Waharte, S.; Trigoni, N.; Julier, S. Coordinated Search with a Swarm of UAVs. In Proceedings of the 2009 6th IEEE Annual Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks Workshops, Rome, Italy, 22–26 June 2009; pp. 1–3. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V.; Chen, H.C.; Kumar, R. Driver behaviour detection and vehicle rating using multi-UAV coordinated vehicular networks. J. Comput. Syst. Sci. 2017, 86, 3–32. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative Routing Problem for Ground Vehicle and Unmanned Aerial Vehicle: The Application on Intelligence, Surveillance, and Reconnaissance Missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Zhao, P.; Quan, Q.; Chen, S.; Tang, D.; Deng, Z. Experimental investigation on hover performance of a single-rotor system for Mars helicopter. Aerosp. Sci. Technol. 2019, 86, 582–591. [Google Scholar] [CrossRef]
- Segui-Gasco, P.; Al-Rihani, Y.; Shin, H.S.; Savvaris, A. A Novel Actuation Concept for a Multi Rotor UAV. J. Intell. Robot. Syst. 2014, 74, 173–191. [Google Scholar] [CrossRef]
- Cai, G.; Lum, K.Y.; Chen, B.M.; Lee, T.H. A brief overview on miniature fixed-wing unmanned aerial vehicles. In Proceedings of the IEEE ICCA 2010, Xiamen, China, 9–11 June 2010; pp. 285–290. [Google Scholar] [CrossRef]
- Boon, M.A.; Drijfhout, A.P.; Tesfamichael, S. Comparison of a Fixed-Wing and Multi-Rotor UAV for Environmental Mapping Applications: A Case Study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A survey of hybrid Unmanned Aerial Vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- DJI Mavic 3 Bestellen-DJI Store. Available online: https://store.dji.com/de/product/dji-mavic-3?vid=109821 (accessed on 15 March 2023).
- Bentley, J.L. Multidimensional divide-and-conquer. Commun. ACM 1980, 23, 214–229. [Google Scholar] [CrossRef]
- Maini, P.; Sundar, K.; Singh, M.; Rathinam, S.; Sujit, P.B. Cooperative Aerial–Ground Vehicle Route Planning With Fuel Constraints for Coverage Applications. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3016–3028. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S.; Stockmeyer, L. Some simplified NP-complete problems. In Proceedings of the Sixth Annual ACM Symposium on Theory of Computing, STOC ’74, Seattle, WA, USA, 30 April–2 May 1974; Association for Computing Machinery: New York, NY, USA, 1974; pp. 47–63. [Google Scholar] [CrossRef]
- Irnich, S.; Desaulniers, G. Shortest Path Problems with Resource Constraints. In Column Generation; Desaulniers, G., Desrosiers, J., Solomon, M.M., Eds.; Springer: Boston, MA, USA, 2005; pp. 33–65. [Google Scholar] [CrossRef]
- Schrijver, A. On the history of the transportation and maximum flow problems. Math. Program. 2002, 91, 437–445. [Google Scholar] [CrossRef] [Green Version]
- Bellman, R. On a routing problem. Q. Appl. Math. 1958, 16, 87–90. [Google Scholar] [CrossRef] [Green Version]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Djidjev, H.; Chapuis, G.; Andonov, R.; Thulasidasan, S.; Lavenier, D. All-Pairs Shortest Path algorithms for planar graph for GPU-accelerated clusters. J. Parallel Distrib. Comput. 2015, 85, 91–103. [Google Scholar] [CrossRef] [Green Version]
- Zeng, W.; Church, R.L. Finding shortest paths on real road networks: The case for A*. Int. J. Geogr. Inf. Sci. 2009, 23, 531–543. [Google Scholar] [CrossRef] [Green Version]
- Adoni, W.Y.H.; Nahhal, T.; Aghezzaf, B.; Elbyed, A. The MapReduce-based approach to improve the shortest path computation in large-scale road networks: The case of A* algorithm. J. Big Data 2018, 5, 16. [Google Scholar] [CrossRef] [Green Version]
- Kerr, C.; Jaradat, R.; Ibne Hossain, N.U. Battlefield Mapping by an Unmanned Aerial Vehicle Swarm: Applied Systems Engineering Processes and Architectural Considerations From System of Systems. IEEE Access 2020, 8, 20892–20903. [Google Scholar] [CrossRef]
- Saeed, A.; Abdelkader, A.; Khan, M.; Neishaboori, A.; Harras, K.A.; Mohamed, A. On Realistic Target Coverage by Autonomous Drones. arXiv 2018, arXiv:1702.03456. [Google Scholar] [CrossRef] [Green Version]
- Viseras, A.; Garcia, R. DeepIG: Multi-Robot Information Gathering With Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2019, 4, 3059–3066. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.; Krause, A.; Guestrin, C.; Kaiser, W.J. Efficient Informative Sensing using Multiple Robots. J. Artif. Intell. Res. 2009, 34, 707–755. [Google Scholar] [CrossRef]
- Viseras, A.; Wiedemann, T.; Manss, C.; Magel, L.; Mueller, J.; Shutin, D.; Merino, L. Decentralized multi-agent exploration with online-learning of Gaussian processes. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Swede, 16–21 May 2016; pp. 4222–4229. [Google Scholar] [CrossRef] [Green Version]
- Krichen, M.; Lahami, M.; Cheikhrouhou, O.; Alroobaea, R.; Maâlej, A.J. Security testing of internet of things for smart city applications: A formal approach. In Smart Infrastructure and Applications; Springer: Cham, Switzerland, 2020; pp. 629–653. [Google Scholar]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-Aided Networks: Aerial-Ground Cooperative Vehicular Networking Architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Cheng, C.M.; Hsiao, P.H.; Kung, H.T.; Vlah, D. Maximizing Throughput of UAV-Relaying Networks with the Load-Carry-and-Deliver Paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef] [Green Version]
- Ohta, Y.; Ohta, T.; Kohno, E.; Kakuda, Y. A Store-Carry-Forward-Based Data Transfer Scheme Using Positions and Moving Direction of Vehicles for VANETs. In Proceedings of the 2011 Tenth International Symposium on Autonomous Decentralized Systems, Tokyo, Japan, 23–27 March 2011; pp. 131–138. [Google Scholar] [CrossRef]
- Sharma, V.; Ganpati, A. Comparison of Topology Based-Routing Protocols in Wireless Network. J. Multimed. Inf. Syst. 2019, 6, 61–66. [Google Scholar] [CrossRef]
- Moniruzzaman, A.B.M.; Rahman, M.S. Analysis of Topology Based Routing Protocols for Vehicular Ad-Hoc Network (VANET). arXiv 2014, arXiv:1411.7662. [Google Scholar] [CrossRef] [Green Version]
- Kaur, H.; Singh, H.; Sharma, A. Geographic Routing Protocol: A Review. Int. J. Grid Distrib. Comput. 2016, 9, 245–254. [Google Scholar] [CrossRef]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. On the Delay of Reactive-Greedy-Reactive Routing in Unmanned Aeronautical Ad-hoc Networks. Procedia Comput. Sci. 2012, 10, 535–542. [Google Scholar] [CrossRef] [Green Version]
- Zang, C.; Zang, S. Mobility prediction clustering algorithm for UAV networking. In Proceedings of the 2011 IEEE Globecom Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1158–1161. [Google Scholar]
- Liu, K.; Zhang, J.; Zhang, T. The clustering algorithm of UAV networking in near-space. In Proceedings of the 2008 8th International Symposium on Antennas, Propagation and EM Theory, Kunming, China, 2–5 November 2008; pp. 1550–1553. [Google Scholar]
- Krishnamachari, B.; Estrin, D.; Wicker, S. Modelling Data-Centric Routing in Wireless Sensor Networks. IEEE INFOCOM 2002, 2, 39–44. [Google Scholar]
- Belding-Royer, E.M. Multi-Level Hierarchies for Scalable Ad hoc Routing. Wirel. Netw. 2003, 9, 461–478. [Google Scholar] [CrossRef]
- Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the Proceedings. IEEE International Multi Topic Conference, 2001. IEEE INMIC 2001. Technology for the 21st Century, Lahore, Pakistan, 30 December 2001; pp. 62–68. [Google Scholar] [CrossRef] [Green Version]
- Perkins, C.E.; Bhagwat, P. Highly dynamic Destination-Sequenced Distance-Vector routing (DSDV) for mobile computers. ACM SIGCOMM Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef] [Green Version]
- Johnson, D.B.; Maltz, D.A. Dynamic Source Routing in Ad Hoc Wireless Networks. In Mobile Computing; Imielinski, T., Korth, H.F., Eds.; The Kluwer International Series in Engineering and Computer Science; Springer: Boston, MA, USA, 1996; pp. 153–181. [Google Scholar] [CrossRef] [Green Version]
- Zapata, M.G. Secure ad hoc on-demand distance vector routing. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2002, 6, 106–107. [Google Scholar] [CrossRef]
- Forsmann, J.H.; Hiromoto, R.E.; Svoboda, J. A time-slotted on-demand routing protocol for mobile ad hoc unmanned vehicle systems. In Proceedings of the Unmanned Systems Technology IX; SPIE: Orlando, Florida, USA, 2007; Volume 6561, pp. 530–540. [Google Scholar] [CrossRef] [Green Version]
- Park, V.; Macker, J.; Corson, M. Applicability of the temporally-ordered routing algorithm for use in mobile tactical networks. In Proceedings of the IEEE Military Communications Conference. Proceedings. MILCOM 98 (Cat. No.98CH36201), Boston, MA, USA, 19–21 October 1998; Volume 2, pp. 426–430. [Google Scholar] [CrossRef]
- Seither, D.; König, A.; Hollick, M. Routing performance of Wireless Mesh Networks: A practical evaluation of BATMAN advanced. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks, Bonn, Germany, 4–7 October 2011; pp. 897–904. [Google Scholar] [CrossRef]
- Haas, Z.J.; Pearlman, M.R. The performance of query control schemes for the zone routing protocol. ACM SIGCOMM Comput. Commun. Rev. 1998, 28, 167–177. [Google Scholar] [CrossRef] [Green Version]
- Karp, B.; Kung, H.T. GPSR: Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, MobiCom ’00, Boston, MA, USA, 6–11 August 2000; Association for Computing Machinery: New York, NY, USA, 2000; pp. 243–254. [Google Scholar] [CrossRef]
- Cardellini, V.; Colajanni, M.; Yu, P. Geographic load balancing for scalable distributed Web systems. In Proceedings of the 8th International Symposium on Modeling, Analysis and Simulation of Computer and Telecommunication Systems (Cat. No.PR00728), San Francisco, CA, USA, 29 August–1 September 2000; pp. 20–27. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.; Sun, Q.; Li, J.; Yang, F. A novel geographic position mobility oriented routing strategy for UAVs. J. Comput. Inf. Syst. 2012, 8, 709–716. [Google Scholar]
- Zhang, D.G.; Zhao, P.Z.; Cui, Y.y.; Chen, L.; Zhang, T.; Wu, H. A New Method of Mobile Ad Hoc Network Routing Based on Greed Forwarding Improvement Strategy. IEEE Access 2019, 7, 158514–158524. [Google Scholar] [CrossRef]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Strengths | Weak Points |
|---|---|---|
| Single-rotor | Heavy payload Flight time Hovering flight VTOL | Mechanical system Rotor size |
| Multi-rotor | Hovering flight VTOL Velocity Agile maneuverability Confined-space flying | Flight time |
| Fixed-wing | Flight time High Velocity Large-area coverage | Complex aerofoil Limited payload No hovering flight Limited maneuverability |
| Hybrid | Flight time Hovering flight VTOL Agile maneuverability Velocity Large-area coverage | Very expensive Unstable transition mechanism from horizontal to vertical flight |
| Size | Dimensions (m) | Payload (kg) | Velocity (km/h) | Altitude (km) | Example (Accessed on 15 March 2023) |
|---|---|---|---|---|---|
| Very small | 0.3–0.5 | <9 | ≤10 | <0.12 | SmartPlane Pro (https://www.drohnen.de/tag/tobyrich/) DJI Mavic 3 (https://store.dji.com/de/product/dji-mavic-3) |
| Small | 0.51–2 | <185 | <0.4 | Wingcopter 198 (https://wingcopter.com/) Astro (https://freeflysystems.com/alta-x) Scorpion (https://www.quantum-systems.com/) | |
| Medium | 5–10 | <200 | <463 | <1.1 | Trinity F90+ (https://www.quantum-systems.com/) Vector (https://www.quantum-systems.com/) Alta X (https://freeflysystems.com/alta-x) Yangda YD6-1600S (https://www.yangdaonline.com/) |
| Large | >10 | <600 | <5.5 | Primoco UAV One 150 (https://uav-stol.com/primoco-uav-one-150/) Feng Ru 3-100 (https://ev.buaa.edu.cn/info/1133/3165.htm) |
| Features | Centralized | Single-Group | Multi-Group | Multi-Level |
|---|---|---|---|---|
| Very small UAV | ☑ | ☑ | ☑ | ☑ |
| Small UAV | ☑ | ☑ | ☑ | ☑ |
| Medium UAV | 🞭 | ☑ | ☑ | ☑ |
| Large UAV | 🞭 | 🞭 | ☑ | ☑ |
| Gateway UAV | 🞭 | 🞭 | ☑ | ☑ |
| Single-hop wireless | ☑ | ☑ | ☑ | ☑ |
| Multi-hop wireless | 🞭 | ☑ | ☑ | ☑ |
| Interoperability | 🞭 | 🞭 | ☑ | ☑ |
| Stability | 🞭 | 🞭 | ☑ | ☑ |
| Fault tolerance | 🞭 | 🞭 | ☑ | ☑ |
| Cooperative mission | 🞭 | ☑ | ☑ | ☑ |
| Streaming | 🞭 | ☑ | ☑ | ☑ |
| Large aerial coverage | 🞭 | 🞭 | ☑ | ☑ |
| Air-to-air | 🞭 | ☑ | ☑ | ☑ |
| Air-to-ground | ☑ | ☑ | ☑ | ☑ |
| Group-to-group | 🞭 | 🞭 | ☑ | ☑ |
| Architectures | Performance Metrics | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Protocols | Centralized | Single-Group | Multi-Group | Multi-Level | Deliverability | Collision | Scalability | Delay | Throughput | Redundancy | High-Mobility | Link Failure | Interoperability | |
| Topology | LCAD | ☑ | 🞭 | 🞭 | 🞭 | ☑ | 🞭 | 🞭 | 🞭 | ☑ | ☑ | 🞭 | 🞭 | 🞭 |
| DCR | ☑ | ☑ | 🞭 | 🞭 | ☑ | 🞭 | 🞭 | ☑ | ☑ | 🞭 | 🞭 | 🞭 | 🞭 | |
| MLHR | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | ☑ | ☑ | ☑ | 🞭 | 🞭 | 🞭 | ☑ | |
| OLSR | ☑ | ☑ | 🞭 | 🞭 | 🞭 | 🞭 | 🞭 | ☑ | 🞭 | ☑ | 🞭 | ☑ | 🞭 | |
| DSDV | ☑ | ☑ | 🞭 | 🞭 | 🞭 | 🞭 | 🞭 | ☑ | 🞭 | ☑ | 🞭 | 🞭 | 🞭 | |
| BATMAN | ☑ | ☑ | 🞭 | 🞭 | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | |
| DSR | ☑ | ☑ | ☑ | ☑ | 🞭 | 🞭 | ☑ | 🞭 | ☑ | ☑ | 🞭 | 🞭 | ☑ | |
| AODV | ☑ | ☑ | 🞭 | 🞭 | ☑ | 🞭 | 🞭 | 🞭 | ☑ | ☑ | 🞭 | ☑ | 🞭 | |
| TSOD | ☑ | ☑ | 🞭 | 🞭 | ☑ | ☑ | 🞭 | 🞭 | ☑ | ☑ | 🞭 | ☑ | 🞭 | |
| ZRP | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | |
| TORA | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | |
| Geographic position | GPSR | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | ☑ | 🞭 | ☑ |
| GLSR | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | ☑ | |
| GPMOR | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | 🞭 | ☑ | ☑ | 🞭 | ☑ | 🞭 | ☑ | |
| RGR | ☑ | ☑ | ☑ | 🞭 | ☑ | 🞭 | 🞭 | ☑ | ☑ | 🞭 | 🞭 | 🞭 | ☑ | |
| Hierarchical | CAN | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | 🞭 | ☑ |
| MPC | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | ☑ | 🞭 | ☑ | ☑ | ☑ | ☑ | ☑ | |
| Category | Article | Regulation |
|---|---|---|
| UAV categories | Article 3 | Uncrewed aircraft systems operational categories |
| Article 4 | The UAS operational category “open” | |
| Article 5 | The UAS operational category “special” | |
| Article 6 | The UAS operating category “requiring approval” | |
| Operational requirements | Article 7 | Rules and procedures for the operation of UAS |
| Article 8 | Rules and procedures related to the competency of long-distance pilots | |
| Article 10 | Rules and procedures related to the airworthiness of UAS | |
| Risk classes | Article 11 | Rules for operational risk assessment |
| Article 12 | Operating license for the “special” category | |
| Article 14 | Registration of the UAS operator and UAS subject to licensing | |
| Long distance flight | Article 13 | Cross-border operation or operation outside of the state of registration |
| Article 15 | Operating conditions for UAS geographic areas | |
| Privacy policy | Article 19 | Security information |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adoni, W.Y.H.; Lorenz, S.; Fareedh, J.S.; Gloaguen, R.; Bussmann, M. Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges. Drones 2023, 7, 263. https://doi.org/10.3390/drones7040263
Adoni WYH, Lorenz S, Fareedh JS, Gloaguen R, Bussmann M. Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges. Drones. 2023; 7(4):263. https://doi.org/10.3390/drones7040263
Chicago/Turabian StyleAdoni, Wilfried Yves Hamilton, Sandra Lorenz, Junaidh Shaik Fareedh, Richard Gloaguen, and Michael Bussmann. 2023. "Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges" Drones 7, no. 4: 263. https://doi.org/10.3390/drones7040263