
Review of Autonomous Path Planning Algorithms for Mobile Robots

 ,
,
Abstract
:1. Introduction
2. Path Planning Algorithm
2.1. Algorithms Based on Graph Search
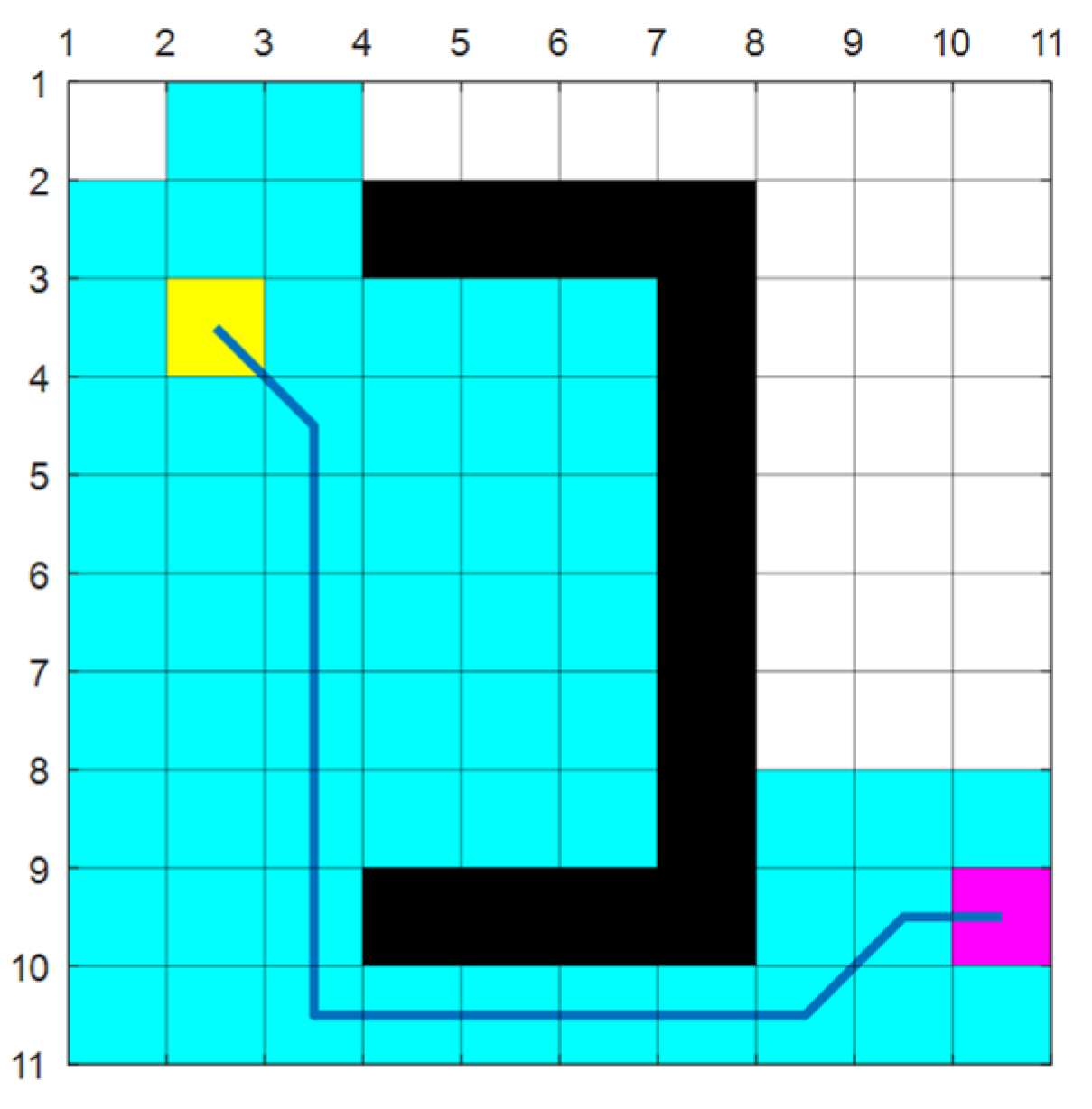
2.1.1. A* Algorithm
2.1.2. Dijkstra’s Algorithm
2.2. Heuristic Intelligent Search Algorithm
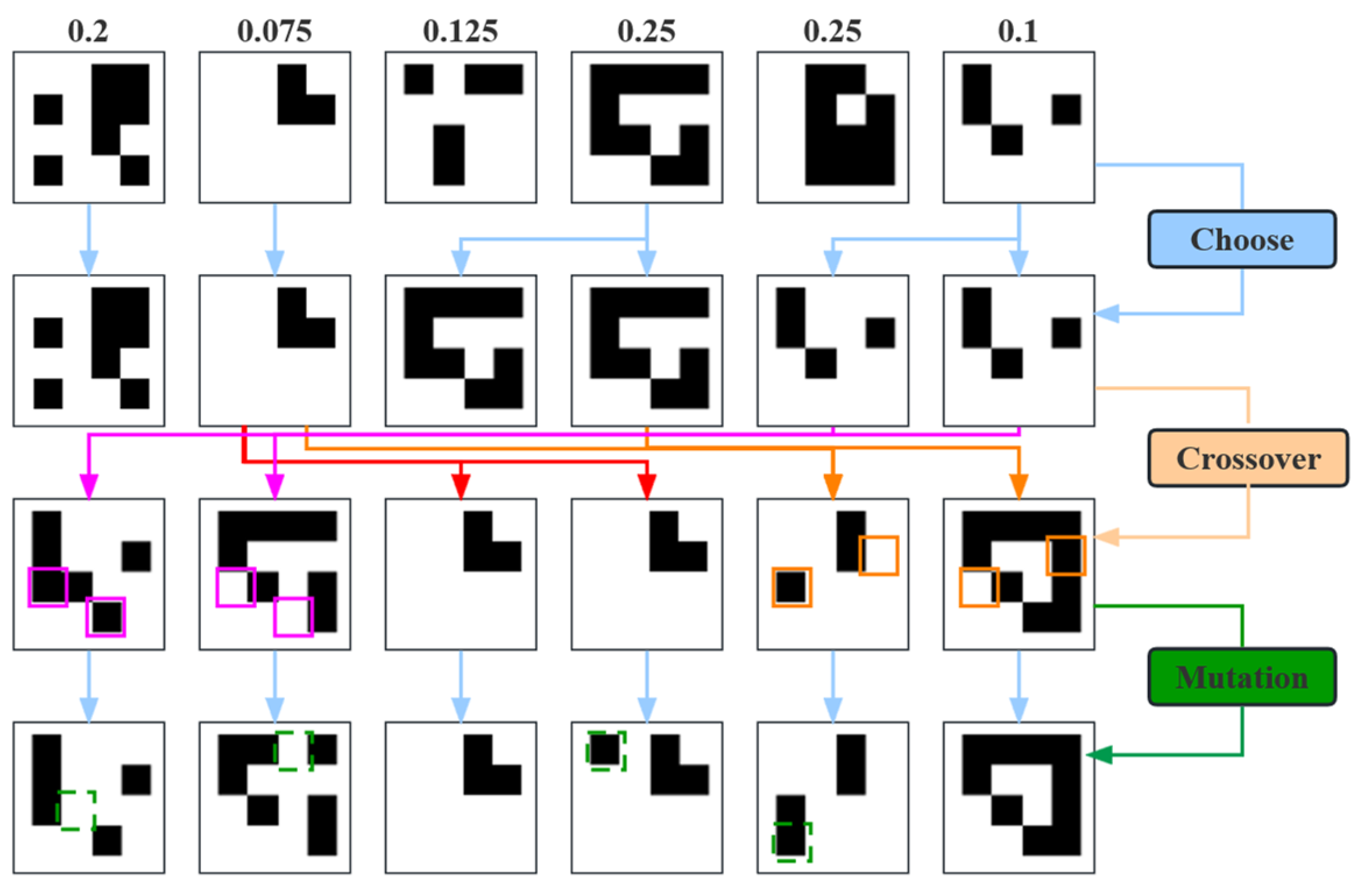
2.2.1. Genetic Algorithm
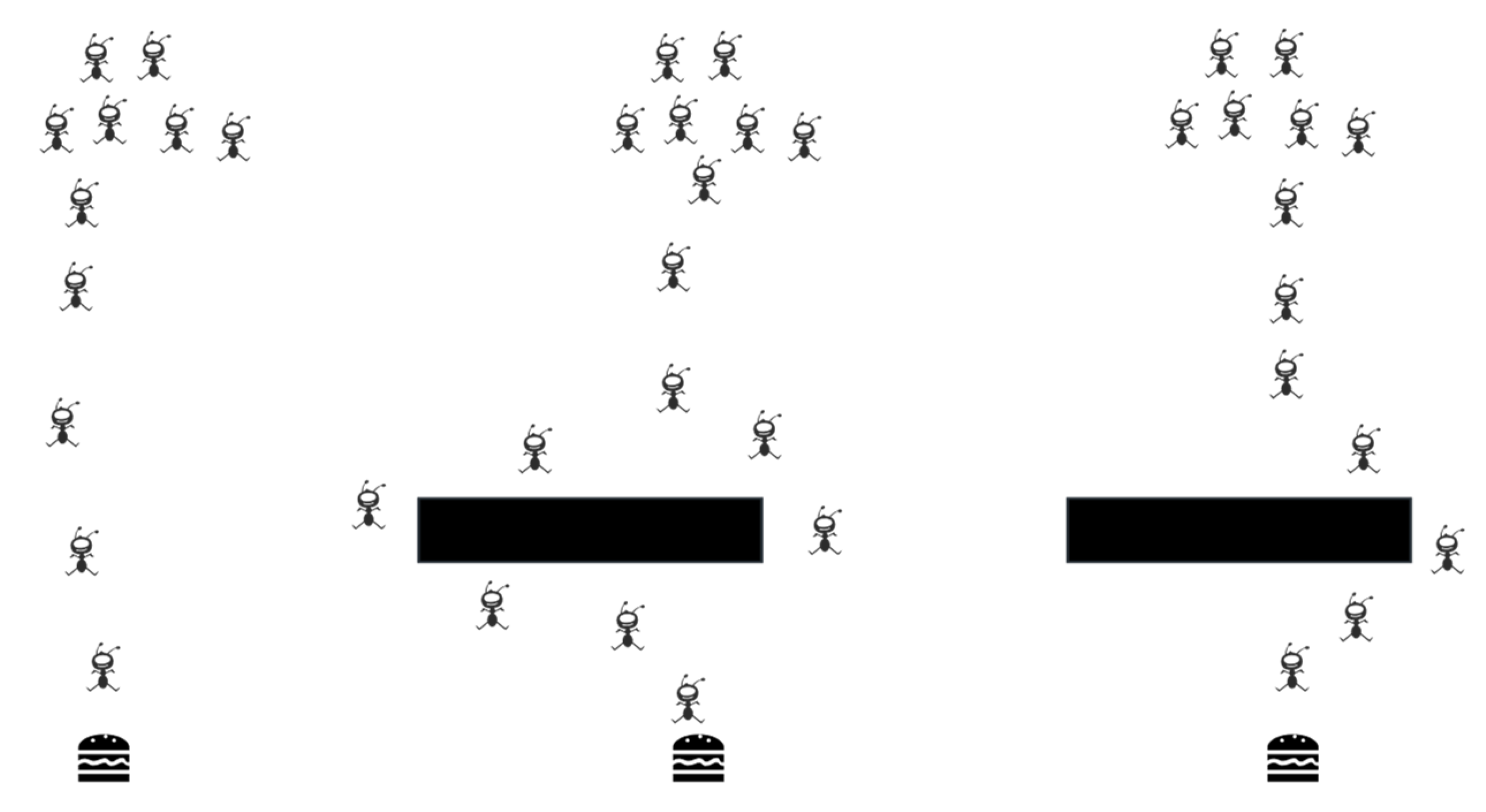
2.2.2. Ant Colony Algorithm
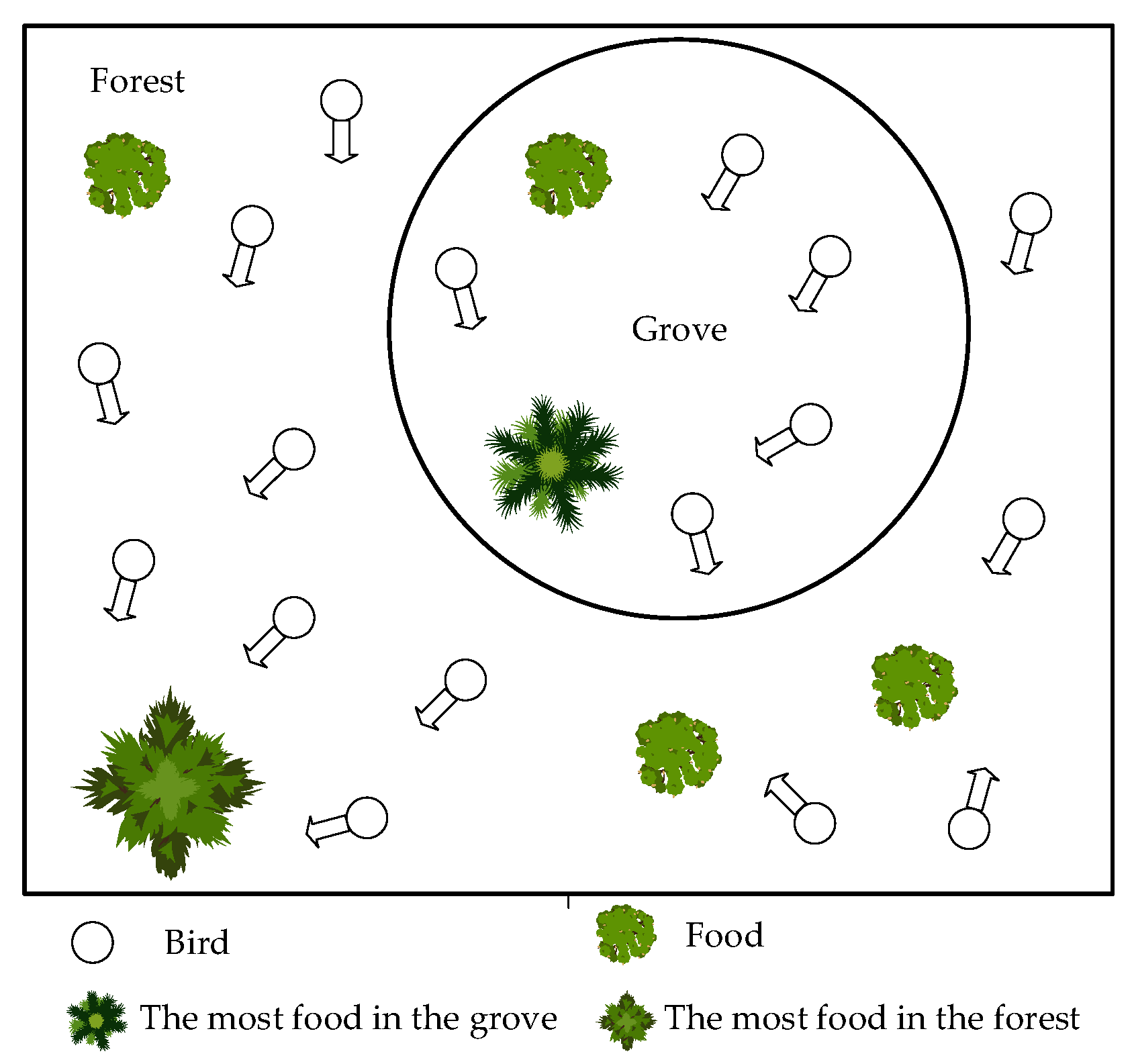
2.2.3. Particle Swarm Optimization
2.3. Algorithm Based on Local Obstacle-Avoidance
2.3.1. Dynamic Window Approach
2.3.2. Artificial Potential Field Method
2.3.3. Time Elastic Banding Algorithm
2.4. Algorithm Based on Artificial Intelligence
2.4.1. Neural Networks
2.4.2. Reinforcement Learning
2.4.3. Brain-like Navigation
2.5. Sampling-Based Algorithms
2.5.1. Rapidly-Exploring Random Tree
2.5.2. Probabilistic Roadmap Method
2.6. Planner-Based Algorithms
2.6.1. Covariant Hamilton Optimization Motion Planning
2.6.2. Trajectory Optimization for Motion Planning
2.7. Constraint Satisfaction Problem-Based Algorithms
2.7.1. Chance Constrained Programming
2.7.2. Model Predictive Control
2.7.3. Quadratic Programming
2.7.4. Soft-Constrained Programming
2.8. Other Algorithms
2.8.1. Differential Evolutionary Algorithm
2.8.2. Biogeography Optimization Algorithm
2.8.3. Level Set Approach
2.8.4. Fast Marching Method
2.8.5. Fuzzy Logic Method
2.9. Discussion
3. Multi-Robot
4. Ground Robot, Unmanned Aerial Robots Cooperative
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tang, B.W.; Zhu, Z.X.; Luo, J.J. Hybridizing particle pswarm optimization and differential evolution for the mobile robot global path planning. Int. J. Adv. Robot. Syst. 2016, 13, 86. [Google Scholar] [CrossRef] [Green Version]
- Wahab, M.N.A.; Nefti-Meziani, S.; Atyabi, A. A comparative review on mobile robot path planning: Classical or meta-heuristic methods? Annu. Rev. Control 2020, 50, 233–252. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Per-spectives and Future Directions. Electronics 2021, 10, 2250. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, J.; Sun, N. A Review of Collaborative Air-Ground Robots Research. J. Intell. Robot. Syst. 2022, 106, 60. [Google Scholar] [CrossRef]
- Klančar, G.; Zdešar, A.; Krishnan, M. Robot Navigation Based on Potential Field and Gradient Obtained by Bilinear Interpolation and a Grid-Based Search. Sensors 2022, 22, 3295. [Google Scholar] [CrossRef]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- An, D.; Mu, Y.; Wang, Y.; Li, B.; Wei, Y. Intelligent Path Planning Technologies of Underwater Vehicles: A Review. J. Intell. Robot. Syst. 2023, 107, 22. [Google Scholar] [CrossRef]
- Khalidi, D.; Gujarathi, D.; Saha, I.T. A heuristic search based path planning algorithm for temporal logic specifications. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8476–8482. [Google Scholar]
- Lim, J.; Tsiotras, P. A generalized A* algorithm for finding globally optimal paths in weighted colored graphs. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021–5 June 2021; pp. 7503–7509. [Google Scholar]
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment. J. Intell. Robot. Syst. 2020, 99, 65–77. [Google Scholar] [CrossRef]
- Li, Y.; Ma, T.; Chen, P.; Jiang, Y.; Wang, R.; Zhang, Q. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation. Ocean Eng. 2017, 133, 107–115. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Zhang, G.; Hsu, L.T. A new path planning algorithm using a GNSS localization error map for UAVs in an urban area. J. Intell. Robot. Syst. 2019, 94, 219–235. [Google Scholar] [CrossRef] [Green Version]
- Primatesta, S.; Guglieri, G.; Rizzo, A. A risk-aware path planning strategy for UAVs in urban environments. J. Intell. Robot. Syst. 2019, 95, 629–643. [Google Scholar] [CrossRef]
- Yewei, Z.; Jianhao, T.; Yaonan, W. Highly time-efficient trajectory planning strategy for rotorcraft in 3-dimensional complex mountain environment. Robotics 2016, 38, 727–737. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Cheng, C.; Yang, D.; Pan, G.; Zhang, F. Path Planning in Localization Uncertaining Environment Based on Dijkstra Method. Front. Neurorobotics 2022, 16, 821991. [Google Scholar] [CrossRef] [PubMed]
- Balado, J.; Díaz-Vilariño, L.; Arias, P.; Lorenzo, H. Point clouds for direct pedestrian pathfinding in urban environments. ISPRS J. Photogramm. Remote Sens. 2019, 148, 184–196. [Google Scholar] [CrossRef]
- Kirsanov, A.; Anavatti, S.G.; Ray, T. Path planning for the autonomous underwater vehicle. In Proceedings of the International Conference on Swarm, Evolutionary, and Memetic Computing, Chennai, India, 19–21 December 2013; Volume 8298, pp. 476–486. [Google Scholar]
- Naigong, Y.; Chen, W.; Fanfan, M. Dynamic environmental path planning based on Q-learning algorithm and genetic algorithm. J. Beijing Univ. Technol. 2017, 43, 1009–1016. [Google Scholar]
- Qu, H.; Xing, K.; Alexander, T. An improved genetic algorithm with co-evolutionary strategy for global path planning of multiple mobile robots. Neurocomputing 2013, 120, 509–517. [Google Scholar] [CrossRef]
- Ataei, M.; Yousefi-Koma, A. Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle. Robot. Auton. Syst. 2015, 67, 23–32. [Google Scholar] [CrossRef]
- Cheng, C.-T.; Fallahi, K.; Leung, H.; Tse, C.K. An AUVs path planner using genetic algorithms with a deterministic crossover operator. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2995–3000. [Google Scholar]
- Dai, R.; Fotedar, S.; Radmanesh, M.; Kumar, M. Quality-aware UAV coverage and path planning in geometrically complex environments. Ad Hoc Netw. 2018, 73, 95–105. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, P.; Ru, Y.; Wu, D.; Wang, S.; Yin, N.; Meng, F.; Liu, Z. A scheduling route planning algorithm based on the dynamic genetic algorithm with ant colony binary iterative optimization for unmanned aerial vehicle spraying in multiple tea fields. Front. Plant Sci. 2022, 13, 998962. [Google Scholar] [CrossRef] [PubMed]
- Sathyan, A.; Ernest, N.D.; Cohen, K. An efficient genetic fuzzy approach to UAV swarm routing. Unmanned Syst. 2016, 4, 117–127. [Google Scholar] [CrossRef]
- Rajput, U.; Kumari, M. Mobile robot path planning with modified ant colony optimisation. Int. J. Bio Inspired Comput. 2017, 9, 106–113. [Google Scholar] [CrossRef]
- Luo, Q.; Wang, H.; Zheng, Y.; He, J. Research on path planning of mobile robot based on improved ant colony algorithm. Neural Comput. Appl. 2020, 32, 1555–1566. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Che, G.; Liu, L.; Yu, Z. An improved ant colony optimization algorithm based on particle swarm optimization algorithm for path planning of autonomous underwater vehicle. J. Ambient Intell. Hum. Comput. 2020, 11, 3349–3354. [Google Scholar] [CrossRef]
- Yu, X.; Chen, W.N.; Gu, T.; Yuan, H.; Zhang, H.; Zhang, J. ACO-A*: Ant colony optimization plus A* for 3-D traveling in environments with dense obstacles. IEEE Trans. Evol. Comput. 2018, 23, 617–631. [Google Scholar] [CrossRef]
- Wan, Y.; Zhong, Y.; Ma, A.; Zhang, L. An accurate UAV 3-D path planning method for disaster emergency response based on an improved multiobjective swarm intelligence algorithm. IEEE Trans. Cybern. 2022, 53, 2658–2671. [Google Scholar] [CrossRef]
- Ji, X.; Hua, Q.; Li, C.; Tang, J.; Wang, A.; Chen, X.; Fang, D. 2-OptACO: An improvement of ant colony optimization for UAV path in disaster rescue. In Proceedings of the 2017 International Conference on Networking and Network Applications (NaNA), Kathmandu, Nepal, 16–19 October 2017; pp. 225–231. [Google Scholar]
- Perez-Carabaza, S.; Besada-Portas, E.; Lopez-Orozco, J.A.; de la Cruz, J.M. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Appl. Soft Comput. 2018, 62, 789–806. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Mhs95 Sixth International Symposium on Micro Machine & Human Science, Nagoya, Japan, 4–6 October 1995. [Google Scholar]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Panigrahi, B.K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning. Swarm Evol. Comput. 2016, 28, 14–28. [Google Scholar] [CrossRef]
- Wu, J.; Song, C.; Fan, C.; Hawbani, A.; Zhao, L.; Sun, X. DENPSO: A distance evolution nonlinear PSO algorithm for energy-efficient path planning in 3D UASNs. IEEE Access 2019, 7, 105514–105530. [Google Scholar] [CrossRef]
- Li, Z.; Liu, W.; Gao, L.E.; Li, L.; Zhang, F. Path planning method for AUV docking based on adaptive quantum-behaved particle swarm optimization. IEEE Access 2019, 7, 78665–78674. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X.; Guan, X.; Delahaye, D. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization. Aerosp. Sci. Technol. 2016, 58, 92–102. [Google Scholar] [CrossRef]
- Zhao, R.; Wang, Y.; Xiao, G.; Liu, C.; Hu, P.; Li, H. A method of path planning for unmanned aerial vehicle based on the hybrid of selfish herd optimizer and particle swarm optimizer. Appl. Intell. 2022, 52, 16775–16798. [Google Scholar] [CrossRef]
- Huang, C. A novel three-dimensional path planning method for fixed-wing UAV using improved particle swarm optimization algorithm. Int. J. Aerosp. Eng. 2021, 2021, 7667173. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment. Auton. Robot. 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Missura, M.; Bennewitz, M. Predictive collision avoidance for the dynamic window approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 8620–8626. [Google Scholar] [CrossRef]
- Kiss, D.; Tevesz, G. Advanced dynamic window based navigation approach using model predictive control. In Proceedings of the 17th International Conference on Methods & Models in Automation & Robotics, Miedzyzdroje, Poland, 27–30 August 2012. [Google Scholar]
- Kathib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots; Springer: New York, NY, USA, 1986. [Google Scholar]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Rousseas, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Optimal robot motion planning in constrained workspaces using reinforcement learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 6917–6922. [Google Scholar]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved artificial potential field method applied for AUV path planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Hao, K.; Zhao, J.; Li, Z.; Liu, Y.; Zhao, L. Dynamic path planning of a three-dimensional underwater AUV based on an adaptive genetic algorithm. Ocean Eng. 2022, 263, 112421. [Google Scholar] [CrossRef]
- Huang, T.; Huang, D.; Qin, N.; Li, Y. Path planning and control of a quadrotor UAV based on an improved APF using parallel search. Int. J. Aerosp. Eng. 2021, 2021, 5524841. [Google Scholar] [CrossRef]
- Jayaweera, H.M.P.C.; Hanoun, S. Path planning of unmanned aerial vehicles (UAVs) in windy environments. Drones 2022, 6, 101. [Google Scholar] [CrossRef]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A novel improved bat algorithm in UAV path planning. J. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar] [CrossRef]
- Roesmann, C.; Feiten, W.; Woesch, T.; Hoffmann, F.; Bertram, T. Trajectory modification considering dynamic constraints of autonomous robots. In Proceedings of the ROBOTIK 2012: 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; Volume 2012. [Google Scholar]
- Rosmann, C.; Feiten, W.; Wosch, T.; Hoffmann, F.; Bertram, T. Efficient trajectory optimization using a sparse model. In Proceedings of the European Conference on Mobile Robots, Barcelona, Spain, 25–27 September 2013. [Google Scholar]
- Lan, A.N.; Pham, T.D.; Ngo, T.D.; Truong, X.T. A proactive trajectory planning algorithm for autonomous mobile robots in dynamic social environments. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020. [Google Scholar]
- Wen, Y.; Jiangshuai, H.; Tao, J.; Xiaojie, S. Improved time-elastic band trajectory planning algorithm for safe smoothing. Control. Decis. Mak. 2022, 37, 2008–2016. [Google Scholar]
- Patle, B.K.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Syed, U.A.; Kunwar, F.; Iqbal, M. Guided Autowave Pulse Coupled Neural Network (GAPCNN) based real time path planning and an obstacle avoidance scheme for mobile robots. Robot. Auton. Syst. 2014, 62, 474–486. [Google Scholar] [CrossRef]
- Bae, H.; Kim, G.; Kim, J.; Qian, D.; Lee, S. Multi-robot path planning method using reinforcement learning. Appl. Sci. 2019, 9, 3057. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.L.; Song, Y.; Hou, Z.G. Neural network based FastSLAM for autonomous robots in unknown environments. Neurocomputing 2015, 165, 99–110. [Google Scholar] [CrossRef]
- Cao, X.; Chen, L.; Guo, L.; Han, W. AUV global security path planning based on a potential field bio-inspired neural network in underwater environment. Intell. Autom. Soft Comput. 2021, 27, 391–407. [Google Scholar] [CrossRef]
- Mu, X.; He, B.; Zhang, X.; Song, Y.; Shen, Y.; Feng, C. End-to-end navigation for autonomous underwater vehicle with hybrid recurrent neural networks. Ocean Eng. 2019, 194, 106602. [Google Scholar] [CrossRef]
- Sutton, R.S. Learning to predict by the methods of temporal differences. Mach. Learn. 1988, 3, 9–44. [Google Scholar] [CrossRef]
- Jiang, L.; Huang, H.; Ding, Z. Path planning for intelligent robots based on deep Q-learning with experience replay and heuristic knowledge. IEEE CAA J. Autom. Sin. 2020, 7, 1179–1189. [Google Scholar] [CrossRef]
- Zou, Q.; Zhang, Y.; Liu, S. A path planning algorithm based on RRT and SARSA (λ) in unknown and complex conditions. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for maples navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; Volume 2017, pp. 31–36. [Google Scholar]
- Yuan, J.; Wang, H.; Zhang, H.; Lin, C.; Yu, D.; Li, C. AUV obstacle avoidance planning based on deep reinforcement learning. J. Mar. Sci. Eng. 2021, 9, 1166. [Google Scholar] [CrossRef]
- Zhang, C.; Cheng, P.; Du, B.; Dong, B.; Zhang, W. AUV path tracking with real-time obstacle avoidance via reinforcement learning under adaptive constraints. Ocean Eng. 2022, 256, 111453. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar] [CrossRef]
- Guo, T.; Jiang, N.; Li, B.; Zhu, X.; Wang, Y.; Du, W. UAV navigation in high dynamic environments: A deep reinforcement learning approach. Chin. J. Aeronaut. 2021, 34, 479–489. [Google Scholar] [CrossRef]
- He, L.; Aouf, N.; Song, B. Explainable Deep Reinforcement Learning for UAV autonomous path planning. Aerosp. Sci. Technol. 2021, 118, 107052. [Google Scholar] [CrossRef]
- Xie, H.; Yang, D.; Xiao, L.; Lyu, J. Connectivity-aware 3D UAV path design with deep reinforcement learning. IEEE Trans. Veh. Technol. 2021, 70, 13022–13034. [Google Scholar] [CrossRef]
- Wu, D.; He, J.; Han, K.; Hui, L. Cognitive navigation and its thought of brain-inspired realization in unmanned combat platform. J. Air Force Eng. Univ. (Nat. Sci. Ed.). 2018, 19, 33–38. [Google Scholar]
- Wu, W.C. Biomimetic Sensor Modeling and Simulations for Flight Control of a Micromechanical Flying Insect; University of California Berkeley: Berkeley, CA, USA, 2006. [Google Scholar]
- Tolman, E.C. Cognitive maps in rats and men. Psychol. Rev. 1948, 55, 189–208. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hwu, T.; Krichmar, J.; Zou, X. A complete neuromorphic solution to outdoor navigation and path planning. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017. [Google Scholar]
- Mirowski, P.; Grimes, M.; Malinowski, M.; Hermann, K.M.; Anderson, K.; Teplyashin, D.; Simonyan, K.; Kavukcuoglu, K.; Zisserman, A.; Hadsell, R. Learning to navigate in cities without a map. Adv. Neural Inf. Process. Syst. 2018, 31, 1–9. [Google Scholar]
- Kang, Y.; Yang, Z.; Zeng, R.; Wu, Q. Smooth-RRT*: Asymptotically Optimal Motion Planning for Mobile Robots under Kinodynamic Constraints. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 8402–8408. [Google Scholar]
- Webb, D.J.; Van den Berg, J. Kinodynamic RRT*: Asymptotically optimal motion planning for robots with linear dynamics. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5054–5061. [Google Scholar]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.-H. Neural RRT*: Learning-based optimal path planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2997–3004. [Google Scholar]
- Ghosh, D.; Nandakumar, G.; Narayanan, K.; Honkote, V.; Sharma, S. Kinematic constraints based bi-directional RRT (KB-RRT) with parameterized trajectories for robot path planning in cluttered environment. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8627–8633. [Google Scholar]
- Jeong, I.B.; Lee, S.J.; Kim, J. Quick-RRT*: Triangular inequality-based implementation of RRT* with improved initial solution and convergence rate. Expert Syst. Appl. 2019, 123, 82–90. [Google Scholar] [CrossRef]
- Bekris, K.E.; Chen, B.Y.; Ladd, A.M.; Plaku, E.; Kavraki, L.E. Multiple query probabilistic roadmap planning using single query planning primitives. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Taheri, E.; Ferdowsi, M.H.; Danesh, M. Closed-loop randomized kinodynamic path planning for an autonomous underwater vehicle. Appl. Ocean Res. 2019, 83, 48–64. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, L.; Chen, Z.; Wang, H.; Shen, J. Improved rrt* for fast path planning in underwater 3d environment. In Proceedings of the 2019 International Conference on Artificial Intelligence and Computer Science, Wuhan, China, 12–13 July 2019; pp. 504–509. [Google Scholar]
- Meng, J.; Pawar, V.M.; Kay, S.; Li, A. UAV path planning system based on 3d informed rrt* for dynamic obstacle avoidance. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; Volume 2018, pp. 1653–1658. [Google Scholar]
- Wu, X.; Xu, L.; Zhen, R.; Wu, X. Biased sampling potentially guided intelligent bidirectional RRT* algorithm for UAV path planning in 3D environment. Math. Probl. Eng. 2019, 2019, 5157403. [Google Scholar] [CrossRef] [Green Version]
- Ye, L.; Chen, J.; Zhou, Y. Real-time path planning for robot using OP-PRM in complex dynamic environment. Front. Neurorobot. 2022, 16, 910859. [Google Scholar] [CrossRef]
- Faust, A.; Oslund, K.; Ramirez, O.; Francis, A.; Tapia, L.; Fiser, M.; Davidson, J. PRM-RL: Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-Based Planning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 5113–5120. [Google Scholar]
- David, J.; Valencia, R.; Philippsen, R.; Bosshard, P.; Iagnemma, K. Gradient based path optimization method for autonomous driving. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4501–4508. [Google Scholar]
- Schitz, D.; Bao, B.; Rieth, D.; Aschemann, H. Shared autonomy for teleoperated driving: A real-time interactive path planning approach. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 999–1004. [Google Scholar]
- Xanthidis, M.; Karapetyan, N.; Damron, H.; Rahman, S.; Johnson, J.; O’Connell, A.; O’Kane, J.M.; Rekleitis, I. Navigation in the presence of obstacles for an agile autonomous underwater vehicle. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 892–899. [Google Scholar]
- Wang, A.; Jasour, A.; Williams, B.C. Non-gaussian chance-constrained trajectory planning for autonomous vehicles under agent uncertainty. IEEE Robot. Autom. Lett. 2020, 5, 6041–6048. [Google Scholar] [CrossRef]
- Castillo-Lopez, M.; Ludivig, P.; Sajadi-Alamdari, S.A.; Sanchez-Lopez, J.L.; Olivares-Mendez, M.A.; Voos, H. A real-time approach for chance-constrained motion planning with dynamic obstacles. IEEE Robot. Autom. Lett. 2020, 5, 3620–3625. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Tsukada, M. Model predictive path-planning controller with potential function for emergency collision avoidance on highway driving. IEEE Robot. Autom. Lett. 2022, 7, 4662–4669. [Google Scholar] [CrossRef]
- Wang, X.; Yao, X.; Zhang, L. Path planning under constraints and path following control of autonomous underwater vehicle with dynamical uncertainties and wave disturbances. J. Intell. Robot. Syst. 2020, 99, 891–908. [Google Scholar] [CrossRef]
- Tordesillas, J.; Lopez, B.T.; How, J.P. FASTER: Fast and safe trajectory planner for flights in unknown environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1934–1940. [Google Scholar]
- Li, Y.; Liu, C. Efficient and safe motion planning for quadrotors based on unconstrained quadratic programming. Robotica 2021, 39, 317–333. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, Z.; Ye, H.; Xu, C.; Gao, F. EGO-Planner: An ESDF-Free gradient-based local planner for quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 478–485. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R. AUV path planning based on differential evolution with environment prediction. J. Intell. Robot. Syst. 2022, 104, 23. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Powers, D.M.W.; Yazdani, A.M.; Sammut, K.; Atyabi, A. Efficient AUV path planning in time-variant underwater environment using differential evolution algorithm. J. Mar. Sci. Appl. 2018, 17, 585–591. [Google Scholar] [CrossRef]
- Simon, D. Biogeography-Based Optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, S.M.; Powers, D.M.; Sammut, K. An autonomous reactive architecture for efficient AUV mission time management in realistic dynamic ocean environment. Robot. Auton. Syst. 2017, 87, 81–103. [Google Scholar] [CrossRef]
- Kimmel, R.; Amir, A.; Bruckstein, A.M. Finding shortest paths on surfaces using level set methods. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 635–640. [Google Scholar] [CrossRef]
- Lolla, T.; Haley, P.J., Jr.; Lermusiaux, P.F.J. Path planning in multi-scale ocean flows: Coordination and dynamic obstacles. Ocean Model. 2015, 94, 46–66. [Google Scholar] [CrossRef]
- Lolla, T.; Ueckermann, M.; Yiğit, K.; Haley, P.J.; Lermusiaux, P.F. Path planning in time dependent flow fields using level set methods. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 166–173. [Google Scholar]
- Liang, S.; Qiu, Z.; Yu, S.; Jiao, J. A Novel Distance Regularized Hybrid Level Set Method for AUV Multi-destination Route Planning. Acta Armamentarii 2020, 41, 750–762. [Google Scholar]
- Subramani, D.N.; Lermusiaux, P.F.J. Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization. Ocean Model. 2016, 100, 57–77. [Google Scholar] [CrossRef] [Green Version]
- Petres, C.; Pailhas, Y.; Petillot, Y.; Lane, D. Underwater path planing using fast marching algorithms. In Proceedings of the Oceans 2005-Europe, Brest, France, 20–23 June 2005; Volume 2, pp. 814–819. [Google Scholar]
- Yu, H.; Shen, A.; Su, Y. Continuous motion planning in complex and dynamic underwater environments. Int. J. Robot. Autom. 2015, 30, 192–204. [Google Scholar] [CrossRef]
- Petres, C.; Pailhas, Y.; Patron, P.; Petillot, Y.; Evans, J.; Lane, D. Path Planning for Autonomous Underwater Vehicles. Robot. IEEE Trans. 2007, 23, 331–341. [Google Scholar] [CrossRef]
- Li, H.; He, B.; Yin, Q.; Mu, X.; Zhang, J.; Wan, J.; Wang, D.; Shen, Y. Fuzzy optimized MFAC based on ADRC in AUV heading control. Electronics 2019, 8, 608. [Google Scholar] [CrossRef] [Green Version]
- Sun, B.; Zhu, D.; Yang, S.X. An optimized fuzzy control algorithm for three-dimensional AUV path planning. Int. J. Fuzzy Syst. 2018, 20, 597–610. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Song, J.; Liu, D. Path planning for autonomous underwater vehicle in presence of moving obstacle based on three inputs fuzzy logic. In Proceedings of the 2019 IEEE 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Nagoya, Japan, 13–15 July 2019; pp. 265–268. [Google Scholar]
- Lei, F.; Yijie, Q.; Dingxin, H.; Wei, L. Multi-robot formation obstacle avoidance based on improved artificial potential field method. Control Eng. 2022, 29, 9. [Google Scholar]
- Ali, A.A.; Rashid, A.T.; Frasca, M.; Fortuna, L. An algorithm for multi-robot collision-free navigation based on shortest distance. Robot. Auton. Syst. 2016, 75, 119–128. [Google Scholar] [CrossRef]
- Yuming, N.; Uniting, L.I.; Cong, Y.A.O.; Jisheng, S. A collaborative multi-robot space exploration method based on fast extended random tree-greedy boundary search. Robotics 2022, 44, 708–719. [Google Scholar]
- Xiong, C.; Lu, D.; Zeng, Z.; Lian, L.; Yu, C. Path planning of multiple unmanned marine vehicles for adaptive ocean sampling using elite group-based evolutionary algorithms. J. Intell. Robot. Syst. 2020, 99, 875–889. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Abbasi, A.; Yazdani, A.; Wang, H.; Liu, Y. Uninterrupted path planning system for Multi-USV sampling mission in a cluttered ocean environment. Ocean Eng. 2022, 254, 111328. [Google Scholar] [CrossRef]
- Hu, Y.; Yao, Y.; Ren, Q.; Zhou, X. 3D multi-UAV cooperative velocity-aware motion planning. Future Gener. Comput. Syst. 2020, 102, 762–774. [Google Scholar] [CrossRef]
- He, W.; Qi, X.; Liu, L. A novel hybrid particle swarm optimization for multi-UAV cooperate path planning. Appl. Intell. 2021, 51, 7350–7364. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Liu, S.; Deng, X. Adaptive differential evolution-based distributed model predictive control for multi-UAV formation flight. Int. J. Aeronaut. Space Sci. 2020, 21, 538–548. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. Circuits Syst. II 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Huang, G.; Cai, Y.; Liu, J.; Qi, Y.; Liu, X. A novel hybrid discrete grey wolf optimizer algorithm for multi-UAV path planning. J. Intell. Robot. Syst. 2021, 103, 49. [Google Scholar] [CrossRef]
- Hoang, V.T.; Phung, M.D.; Dinh, T.H.; Ha, Q.P. Angle-encoded swarm optimization for UAV formation path planning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; Volume 2018, pp. 5239–5244. [Google Scholar]
- Wang, D.; Fan, T.; Han, T.; Pan, J. A two-stage reinforcement learning approach for multi-UAV collision avoidance under imperfect sensing. IEEE Robot. Autom. Lett. 2020, 5, 3098–3105. [Google Scholar] [CrossRef]
- Li, J.; Sun, T.; Huang, X.; Ma, L.; Lin, Q.; Chen, J.; Leung, V.C.M. A memetic path planning algorithm for unmanned air/ground vehicle cooperative detection systems. IEEE Trans. Automat. Sci. Eng. 2021, 19, 2724–2737. [Google Scholar] [CrossRef]
- Niu, G.; Wu, L.; Gao, Y.; Pun, M. Unmanned aerial vehicle (UAV)-assisted path planning for unmanned ground vehicles (UGVs) via disciplined convex-concave programming. IEEE Trans. Veh. Technol. 2022, 71, 6996–7007. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, M.; Chen, Z.; Cheng, L.; Yang, Y.; Li, H. Delivery path planning of heterogeneous robot system under road network constraints. Comput. Electr. Eng. 2021, 92, 107197. [Google Scholar] [CrossRef]
- Vasić, M.K.; Drak, A.; Bugarin, N.; Kružić, S.; Musić, J.; Pomrehn, C.; Schöbel, M.; Johenneken, M.; Stančić, I.; Papić, V.; et al. Deep semantic image segmentation for UAV-UGV cooperative path planning: A car park use case. In Proceedings of the International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2020; Volume 2020, pp. 1–6. [Google Scholar]
- Yue, Y.; Wen, M.; Putra, Y.; Wang, M.; Wang, D. Tightly-coupled perception and navigation of heterogeneous land-air robots in complex scenarios. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; Volume 2021, pp. 10052–10100. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Mechanism | References | Year | Improvements | Advantages | Limitations |
|---|---|---|---|---|---|---|
| A* | Find the shortest path to the current node but to the destination | [9] | 2020 | Incorporate the A* algorithm into linear time logic. | Reduces the number of nodes and the time to generate paths. | / |
| [11] | 2019 | The risk cost and distance cost functions are simplified, and the critical path points are extracted, which are combined with the window method | Reduces the number of A* nodes and eliminates the need for speed space modeling | Most parameters are determined in simulation experiments | ||
| [13] | 2021 | The turning cost function is added, the generated trajectory is optimized, and the maximum search distance and maximum path length are limited | Reduces search time, path length, and number of nodes | / | ||
| [14] | 2019 | New cost function designed using ray tracing technique to simulate reflection paths | Provides a safe path based on position error prediction | Energy loss to the unmanned aerial robot when there are sharp turns in the path | ||
| [15] | 2019 | A cost function is designed that considers both path length and risk cost | Minimizing the risk to the crowd | There is no guarantee that the path is the optimal solution | ||
| [16] | 2016 | Fusing sparse A* algorithms with bio-inspired neurodynamic models | Mitigates the computational bulk of the A* algorithm during 3D track planning | More complex dynamic impediments such as air resistance are not taken into account | ||
| GA | Populations generate new populations through crossover and mutation | [21] | 2017 | Combined with Q-learning algorithms and designed for continuous environments with R-values and actions | Autonomously finding suitable obstacle avoidance routes and using Q-learning algorithms for dynamic obstacle avoidance | Q-learning algorithms need to learn from mistakes and robots need to experience failures to find a route |
| [22] | 2013 | Combining co-evolutionary mechanisms with improved genetic algorithms | Faster convergence by avoiding local optimum problems | Currently only running in known static environments | ||
| [23] | 2015 | Combines genetic algorithms and particle swarm optimization algorithms for global path planning in autonomous underwater robots and uses current factors as evaluation factors for genetic algorithms | Reduces energy consumption of autonomous underwater robots when navigating in a wide range of marine environments | No consideration of the impact of autonomous underwater robot movement on the performance assessment | ||
| [24] | 2010 | Combined with dynamic planning, use a B-spline curve to optimize the path | Optimizes path length, minimum turning call, and a maximum pitch angle | / | ||
| [25] | 2018 | Combining mixed integer linear programming with genetic algorithms | Better paths can be achieved through lower energy costs | / | ||
| [27] | 2016 | Combining genetic algorithms and fuzzy logic | Improving the accuracy of route planning | Its cost function takes slightly longer to run | ||
| ACO | Ants move toward areas of high pheromone concentration | [28] | 2017 | Introduced probability multiplication factor | Reduced computational effort and smoother paths | The planned path closely follows the edge of obstacles |
| [29] | 2020 | Propose an adaptive pheromone volatility factor strategy; propose a load balancing strategy | Improved efficiency of algorithm operation | Planned paths through the corners of adjacent obstacles | ||
| [30] | 2018 | RA and AACO navigation controller designed; RA-AACO hybrid controller designed using the logic RA and AACO logic | Enabling path planning for humanoid robots | 6–7% error in the planned path length and time spent | ||
| [31] | 2020 | Introduction of particle swarm optimization algorithms to improve pheromone update rules | Improved search efficiency and shorter optimization paths | Slow convergence rate | ||
| [32] | 2018 | Combined with the A* algorithm | The optimal path is obtained | As the number of search dimensions increases, there is a risk of falling into a local optimum | ||
| [33] | 2022 | Transformation of the path planning task into a multi-objective optimization task with multiple constraints, introducing an exact population intelligence search method that improves ant colony optimization | Improving the effectiveness of unmanned aerial robot mission planning | / | ||
| [35] | 2017 | Two different pheromone table encodings for MTS-ACO are proposed and a minimum time search heuristic function is designed | Better route planning solutions in less time | The trajectories obtained can only be flown directly by drones with specific capabilities | ||
| PSO | Individual and group collaboration and information sharing | [37] | 2021 | Introduction of adaptive fractional speed | Enhanced ability to step out of the local optimum solution | Computationally intensive, unstable numerical oscillations, and difficulty in model optimization |
| [38] | 2016 | Combination of improved particle swarm optimization algorithm and gravitational search algorithm | Optimized path length, number of turns, and arrival events | Focusing only on evacuation path optimization problems with a single evacuation path | ||
| [39] | 2019 | Converts inertial weighting factors and learning factors from linear to non-linear to describe the obstacle with a penalty function | Reduced energy consumption of autonomous underwater robots in underwater environments | May fall into a local optimum solution | ||
| [40] | 2019 | Introduction of adaptive laws and quantum behavior for global time optimization | Improved search performance | Slow convergence at later stages | ||
| [42] | 2022 | A combination of a selfish population optimizer and a particle swarm optimizer is proposed | Simplifies the structure of SHO and improves SHO search capabilities | / | ||
| [43] | 2021 | Parallel evolution of segmented paths using DC strategies to transform high-dimensional problems into multiple parallel low-dimensional problems | Ability to search for viable routes in complex environments with a large number of waypoints, providing better stability | / | ||
| Dijkstra | Finding the shortest path in a directed graph | [18] | 2022 | The error caused by the sensor is considered | Generates the planning path with the minimum cumulative error | Inadequate handling in large environments |
| [19] | 2019 | Introduction of equivalent paths | Optimal paths were calculated | No experimental results for verification | ||
| DWA | Sampling of the surroundings (robot speed, motion parameters, and position) at the current moment | [45] | 2020 | Add two new evaluation functions that use Q-learning to adaptively learn the parameters of DWA | The shortcomings of the original evaluation function have been modified to enhance global navigation with strong self-learning and self-adaptation | The planned path is not optimal |
| [46] | 2019 | A dynamic collision model is proposed | Consider the movement of other obstacles and predict future environmental collisions | May provide incorrect modeling when dealing with a large number of dynamic obstacles | ||
| [47] | 2012 | Abandoned weighted objective function and used model predictive control | The navigation function is defined as the optimization objective based on the configuration space | Limitations when applied to robots with constrained kinematics | ||
| APF | Changing the direction of motion of a robot by repulsive and gravitational forces | [49] | 2015 | Combining the bacterial evolutionary algorithm with the artificial potential field method the bacterial potential field method is proposed | No need to calculate the global optimal path enhancing the local and global controllability of the robot in dynamic environments | Trajectory planning is highly dependent on the hardware architecture of the robot |
| [50] | 2020 | Use reinforcement learning to adjust the parameters of a potential field | It has better running time and cost function value | / | ||
| [51] | 2020 | Addition of a distance correction factor to the repulsive potential field function; combined with the positive hexagonal bootstrap method | Reduced calculations during navigation | Obstacle avoidance in 3D environments was not considered in the experiment | ||
| [52] | 2022 | Improved calculation of the direction of combined forces using the space vector method | Improved computational efficiency of algorithms and reduced cost of obstacle avoidance for autonomous underwater robots | No consideration of the mechanical constraints of the autonomous underwater robot and the size of the obstacle | ||
| [53] | 2021 | A method of moving around the nearest obstacle is introduced, and a parallel search algorithm is proposed | Avoiding the trap of local minima in artificial potential fields | / | ||
| [54] | 2022 | Proposing a new and improved attraction to enhance the sensitivity of unmanned aerial robots to wind speed and direction | A modified wind resistance gravitational function that takes into account any small changes in relative displacement caused by the wind causing the unmanned aerial robot to drift in a certain direction | / | ||
| Neural Network | An information processing system that mimics the structure and function of the brain’s neural networks | [61] | 2014 | Introduction of directional automatic wave control and accelerated neuronal discharge based on dynamic thresholding techniques | Improved path query times, the model uses parameters independent of configuration space and neuron properties | Training neural networks offline is time-consuming |
| [62] | 2019 | Combining Q-learning algorithms with convolutional neural networks | Improved path planning performance | Limited to a single scenario, if the target changes it will not work without a large amount of additional training data | ||
| [63] | 2015 | Online compensation of range errors using multilayer neural networks and estimation of robot paths and states of environmental maps using Gaussian weighted integration of third-order volume rules | Mitigation of error accumulation caused by inaccurate linearization of the SLAM non-linear functions and incorrect range models | / | ||
| TEB | Start point and target point states are specified by the global planner, with N robot poses inserted between, and movement times defined between points | [58] | 2020 | Proposing actively timed elastic bands, incorporating a hybrid inverse velocity barrier model into the objective function of the TEB algorithm | Drive mobile robots to actively avoid dynamic obstacles | There is a tendency to oversteer in corners with partial meandering |
| [59] | 2022 | Add penalty function factor constraint, acceleration jump suppression constraint, end-smoothing constraint | Reduced maximum impact on the robot, smooth and accurate arrival at the target point and reduced end impact | Small improvement compared to static weights | ||
| reinforcement learning | Train intelligence to take action to maximize their returns | [67] | 2020 | Combining deep Q-learning with experience replay mechanisms and heuristic knowledge | Solves the “dimensional catastrophe” problem, avoiding blind exploration and faster convergence to the optimal action strategy | Only possible in idealized environments |
| [68] | 2020 | Increase the choice of extension points, introduce the idea of biased targets, use task return functions, target distance functions, and angle constraints | Reduces the number of invalid nodes and improves the performance of the RRT algorithm | The algorithm has limited generalization capabilities | ||
| [70] | 2017 | Designed a learning-based mapless path planner | Training the planner by asynchronous deep reinforcement learning methods so that training and sample collection can be performed in parallel | Insufficient theoretical support and low sample sampling rate | ||
| [72] | 2022 | A line-of-sight-based guidance method is used to generate the target angle for path tracking and to generate the error relative to the carrier coordinate system | Facilitates the filtering of irrelevant environmental information and the generation of corresponding policies, enabling more efficient policy approximation | Considers the effect of only a single environmental variable | ||
| [73] | 2020 | A deep reinforcement learning method for unmanned aerial robot path planning based on global situational information is proposed, using competing dual-depth Q networks | Higher cumulative rewards and success rates can be achieved | For most winged tactical drones, this option is not suitable | ||
| [76] | 2021 | A multi-step competitive DDQN-based algorithm is proposed to design locally optimal unmanned aerial robot paths using the constructed coverage graph | Improved stability and faster convergence of the algorithm | / | ||
| Rapid-exploration Random Tree | Built by the random spanning tree method, connecting the generated tree to the trunk of the starting point | [87] | 2019 | Extending the retrospective scope of the two optimization processes of the RRT* algorithm; combined with a sampling strategy | Guaranteed better paths and faster convergence with the same time and space complexity | More computing resources required |
| [89] | 2019 | Assessing the feasibility of RRT extensions and exploration through fuzzy controllers combined with six-degree-of-freedom nonlinear models | Handling of random and uncertain information Highly competent | High chance and low accuracy | ||
| [91] | 2018 | Combining bi-directional artificial potential field methods with the idea of bi-directional bias sampling | Reduced invalid spatial sampling and increased convergence speed | / | ||
| Other Algorithms | [106] | 2022 | Designed path evaluator | Helps autonomous underwater robots use ocean currents to avoid collisions | No consideration of the cost of local paths | |
| [107] | 2018 | Using differential evolutionary algorithms to optimize control points for B spline generation | Effective handling of obstacles in three-dimensional space | Failure to consider the complexity of the underwater terrain | ||
| [113] | 2016 | Derivation of stochastic dynamic orthogonal level set equations that can be used in dynamically varying current fields | Minimises energy consumption and optimizes the optimal path | The final path is vulnerable to currents | ||
| [114] | 2020 | A new discrete iterative equation is derived by localizing the traditional level set function and introducing a polynomial distance regularisation (P-DRE) term | Improved computational efficiency of the level set algorithm | The simulation does not provide performance results in the case of obstacle avoidance | ||
| [116] | 2015 | Introduction of multiple constraints and decision criteria to process water flows according to velocity profiles | Reduces path search time and generates 3D smooth paths | / | ||
| [118] | 2019 | Introduction of ADRC to manage current disturbances | Improved adaptability of autonomous underwater robots to the marine environment | If the initial values are not set correctly, the control system will be unstable | ||
| [119] | 2018 | Optimizing the value of the affiliation function for fuzzy logic using the quantum particle swarm algorithm | Presents a certain resistance to interference and does not require an accurate mathematical model | Insufficient steady-state accuracy in practical applications |
| Algorithms | Mechanism | References | Year | Improvements | Advantages | Limitations |
|---|---|---|---|---|---|---|
| Multi-robot | Cooperation between multiple robots to complete a predetermined task | [121] | 2022 | Constructed a motion situational awareness map, created a rotational potential field, set up a rejection potential function and a robot priority model | The situational awareness map ensures that the robot makes the best decisions at all times, solving the local minima and targeting unreachability problems of the artificial potential field method | Robot control methods are not optimal |
| [122] | 2016 | Proposed shortest distance algorithm based on the relative orientation | Ensures smooth and collision-free robot trajectories | The simulation does not provide performance results in the case of obstacle avoidance | ||
| [123] | 2022 | Thiessen polygons are used to model and partition the environment, the GRF algorithm is introduced to refine the search, and a multi-robot task allocation method based on an improved market mechanism is used to dynamically allocate exploration target points | The ability to achieve rapid deployment of functional modules and rapid portability of algorithms between various types of multi-robot systems. | Error between simulation results and prototype experimental results | ||
| [124] | 2020 | Integration of population-based frameworks and elite selection methods into evolutionary path planning; introduction of simulated annealing methods and particle swarm optimization | Generates trajectories with higher sampling values, a lower standard deviation, and shorter execution times | The method is not applied to 3D workspaces | ||
| [125] | 2022 | Combines a novel B-spline data framework with a particle swarm optimization-based solution engine | Robust for handling interference and abnormal operation, providing fast obstacle avoidance | / | ||
| [131] | 2018 | An angle-coded particle swarm optimization algorithm is proposed to design multiple constraints that combine the shortest path and safe unmanned aerial robot operation | Accelerated particle swarm convergence that generates safe and reliable paths for each unmanned aerial robot in a formation | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, H.; Shao, S.; Wang, T.; Yu, X.; Jiang, Y.; Cao, Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. https://doi.org/10.3390/drones7030211
Qin H, Shao S, Wang T, Yu X, Jiang Y, Cao Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones. 2023; 7(3):211. https://doi.org/10.3390/drones7030211
Chicago/Turabian StyleQin, Hongwei, Shiliang Shao, Ting Wang, Xiaotian Yu, Yi Jiang, and Zonghan Cao. 2023. "Review of Autonomous Path Planning Algorithms for Mobile Robots" Drones 7, no. 3: 211. https://doi.org/10.3390/drones7030211