
Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope

Abstract
:1. Introduction
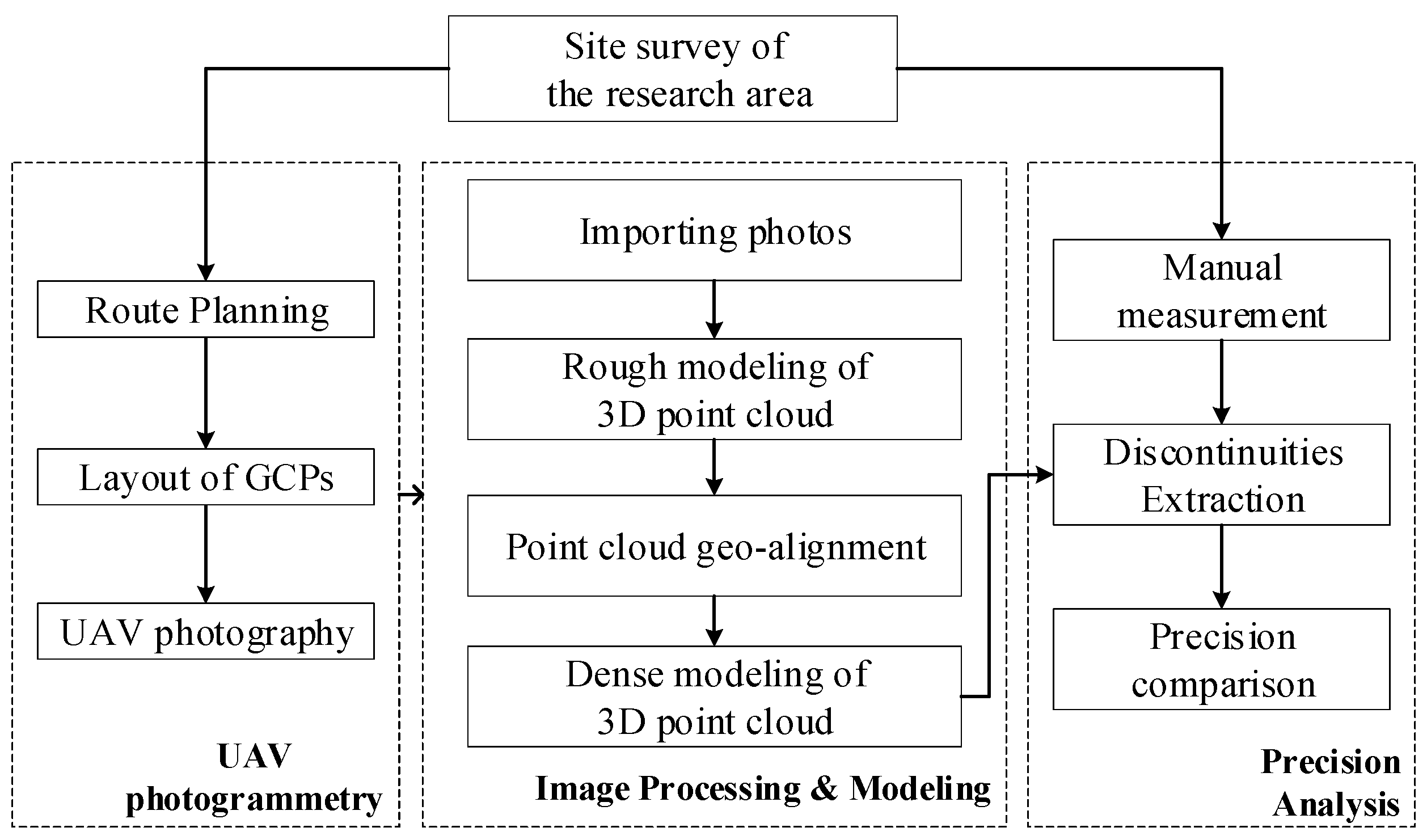
2. UAV-DP Work Procedures
2.1. UAV Type
2.2. Reconstruction of Rock Mass Characteristics
2.3. Discontinuities Extraction
- (1)
- Estimating point cloud normal vectors
- (2)
- Clustering of structural surfaces
- (3)
- Eliminating noise points and solving for mean orientations.
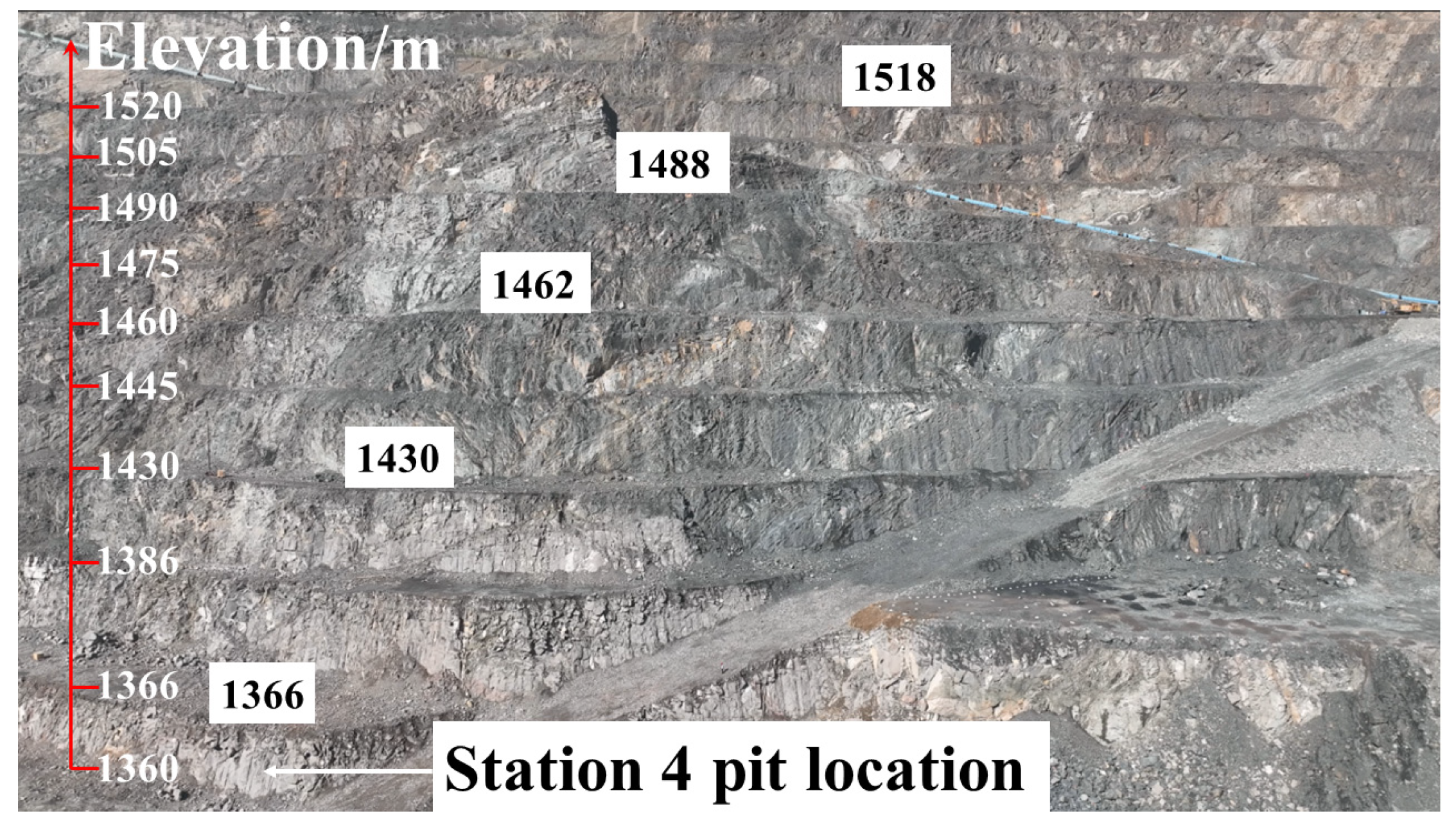
3. Engineering Application Study
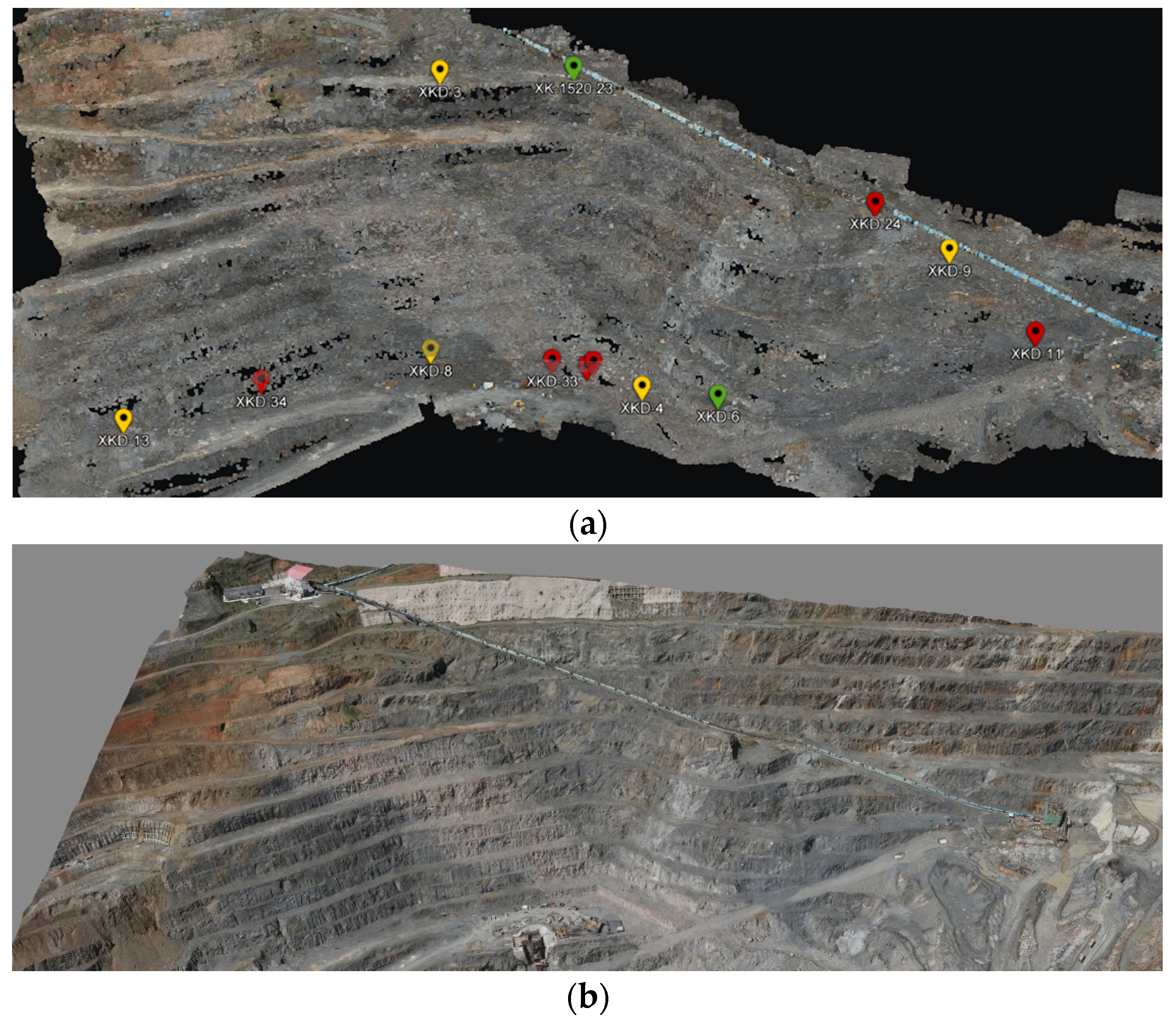
3.1. Image Acquisition and Point Cloud Modeling
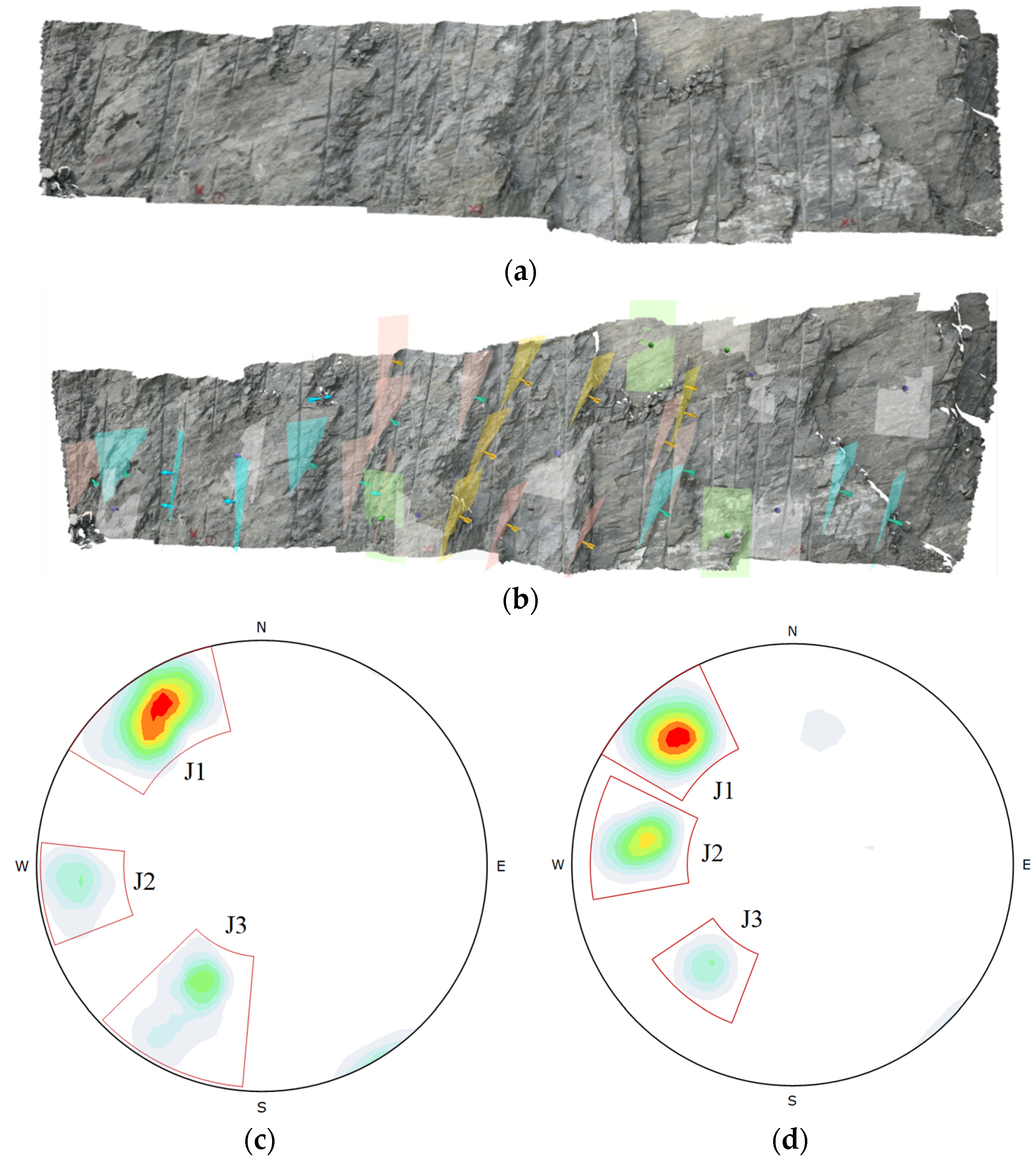
3.2. Discontinuity Extraction Precision Verification
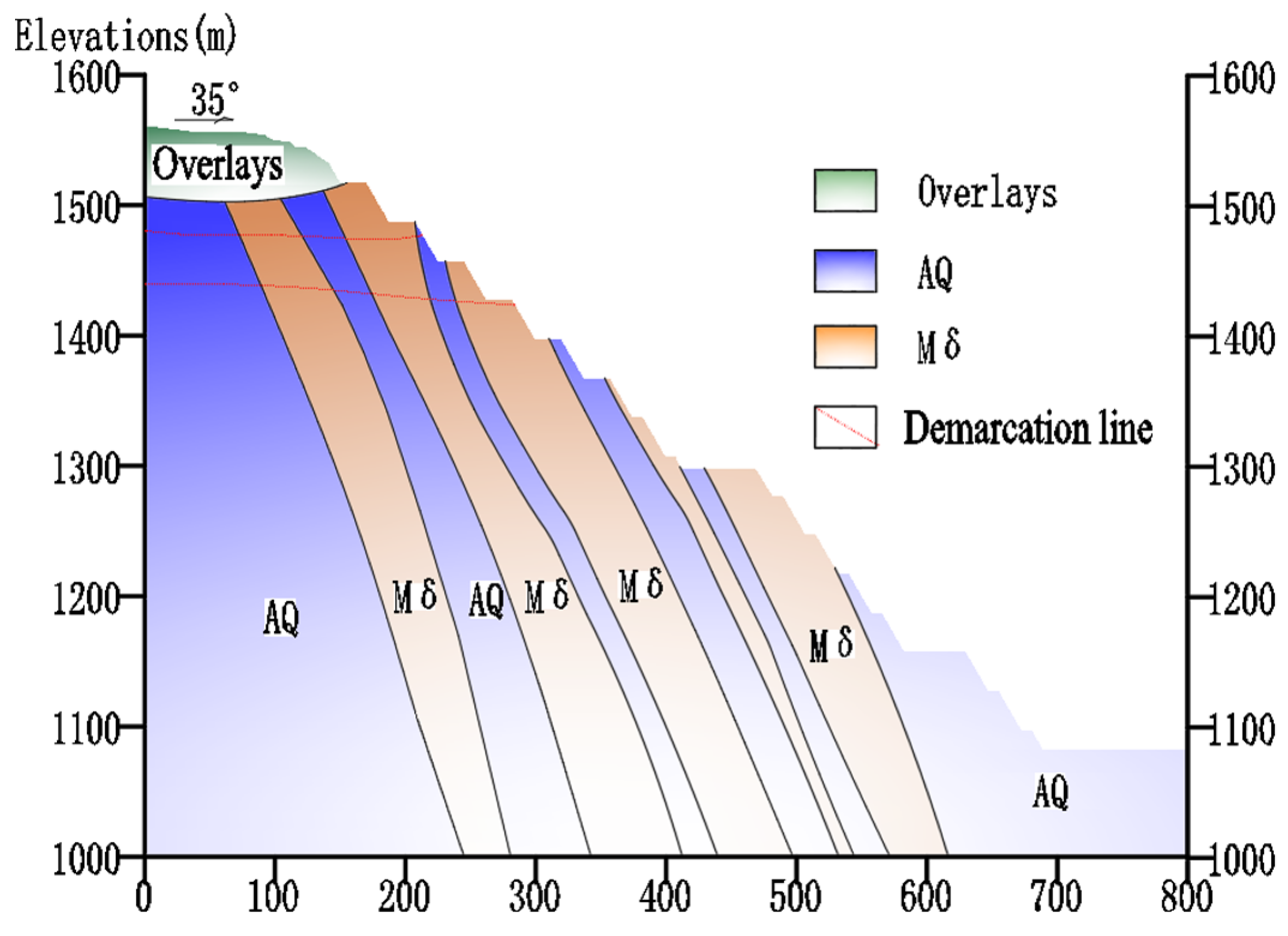
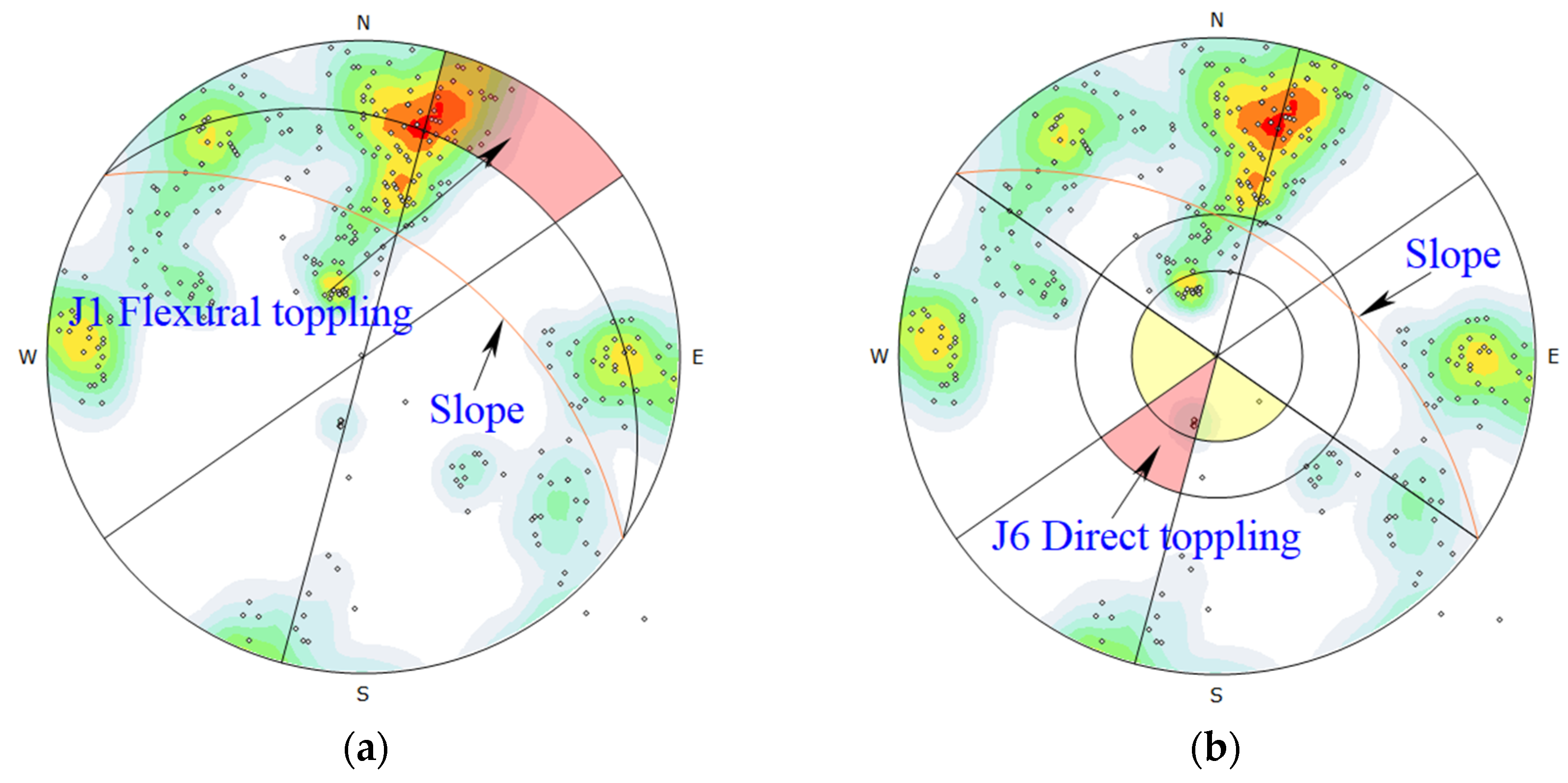
3.3. Grouping of Structural Surfaces and Analysis of Failure Model
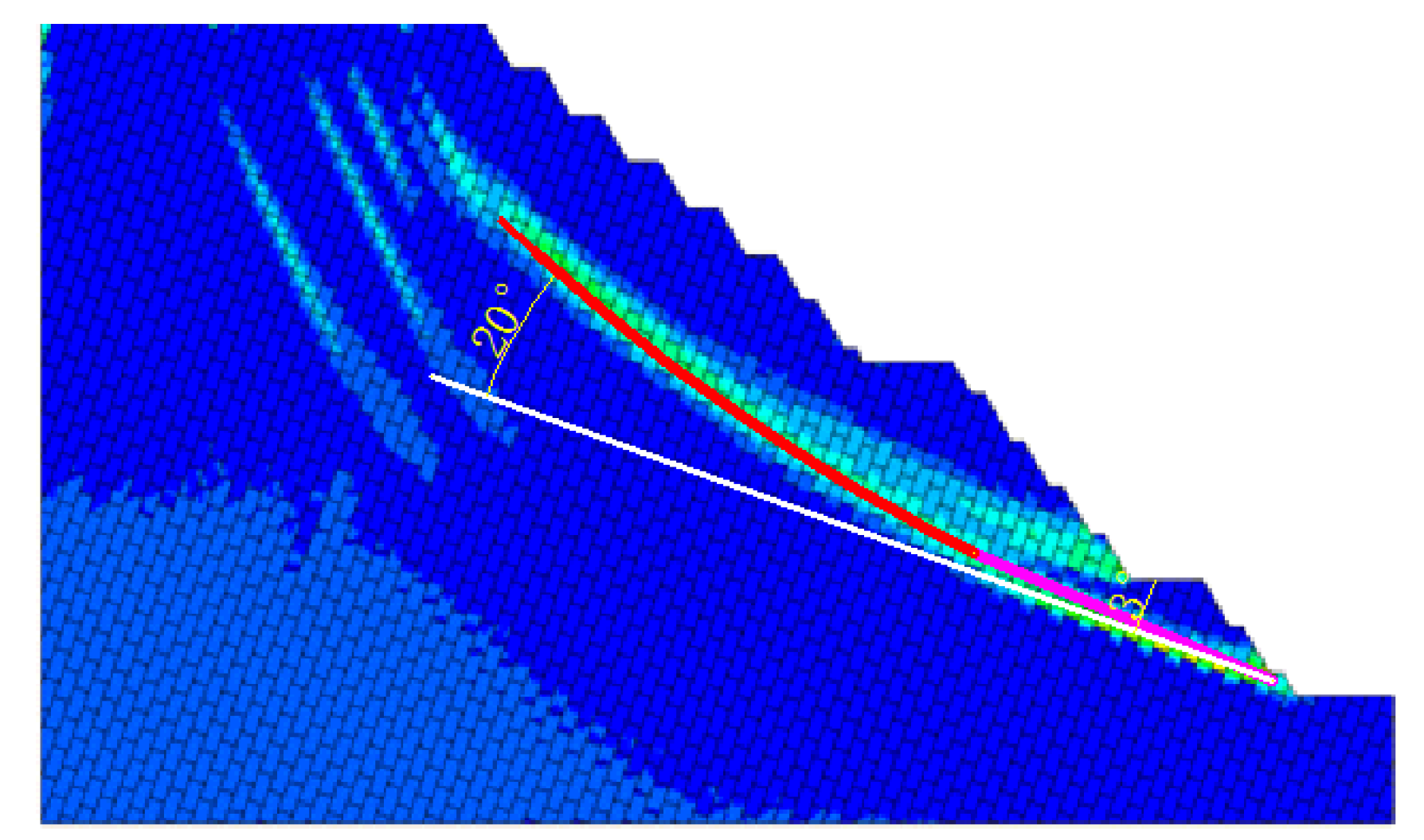
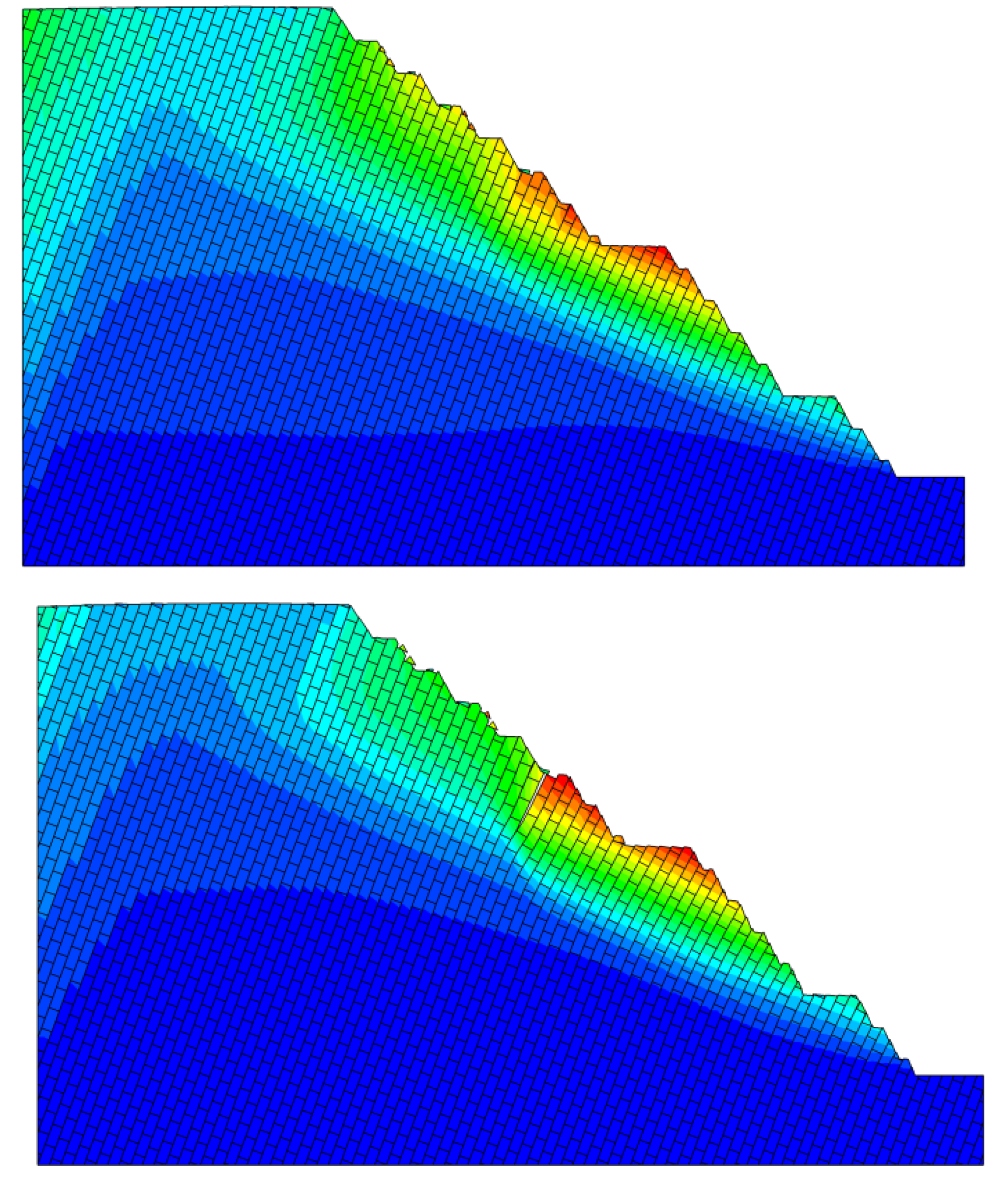
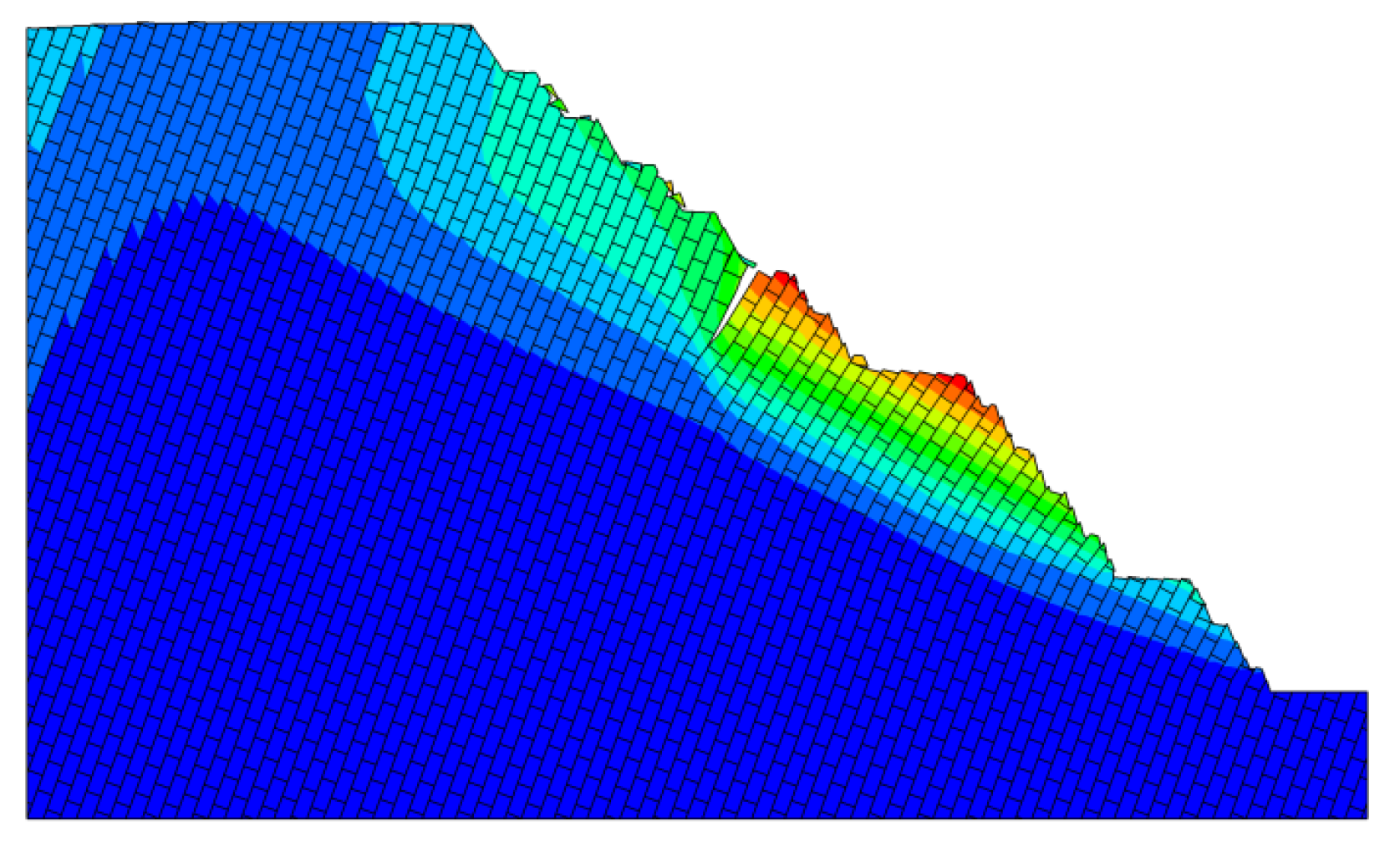
3.4. Slope Stability and Deformation Characteristics Analysis
4. Conclusions
- (1)
- Compared with the traditional manual measurement method, the average directional error of the structure surface orientations obtained by UAV-DP is less than 5°, and the slight difference may be caused by insufficient point cloud density, which does not affect the engineering application, verify the feasibility of UAV-DP technology in the geological survey of high-steep rock slopes.
- (2)
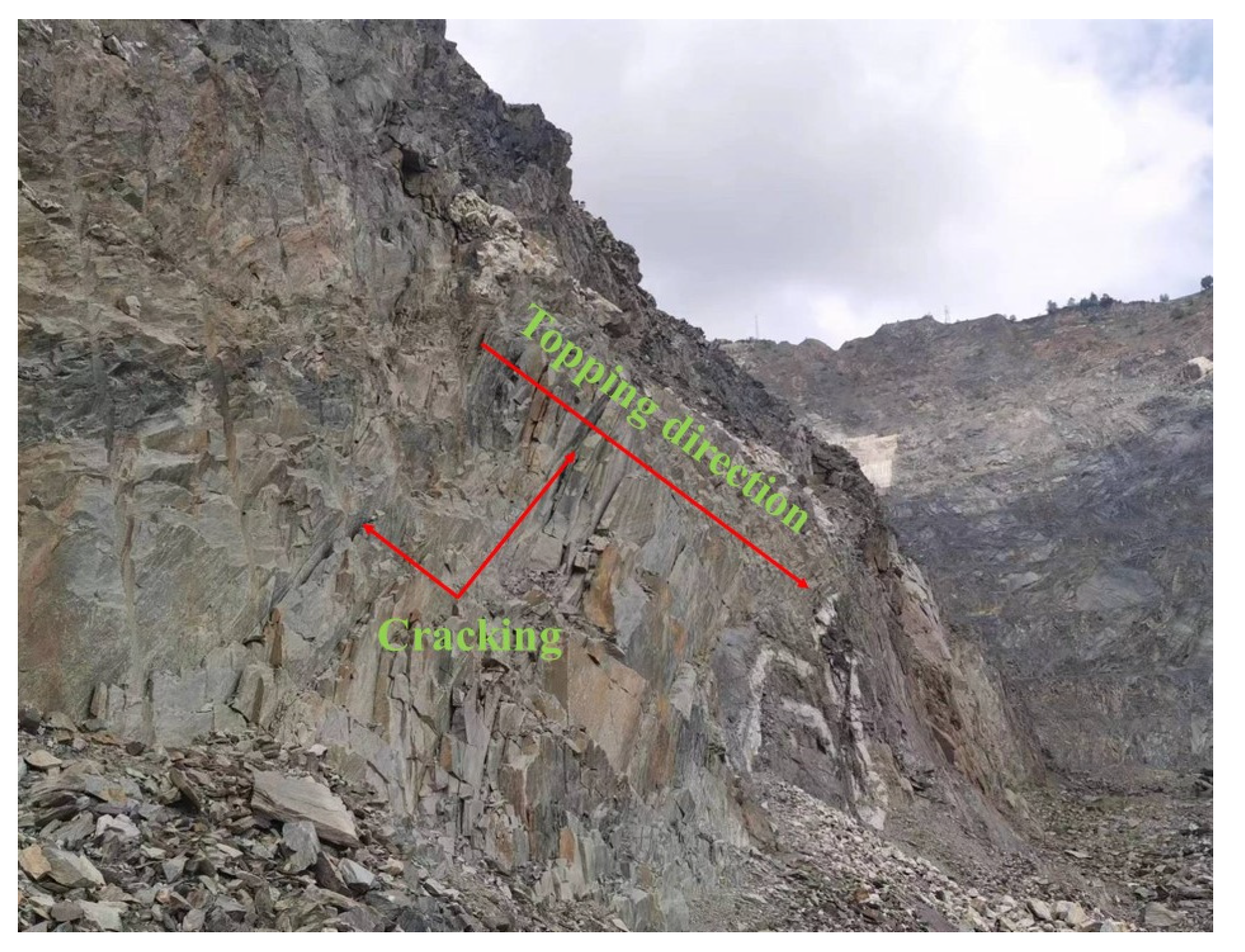
- There are six groups of dominant structural surfaces developed in the slope of the study area. The safety factor of the slope is 1.12, calculated by the distinct element-strength reduction method, which is not a high safety reserve and may be failed by toppling deformation under the cutting of J1 and J6 structural surfaces. This is similar to the failure model of the slope in the adjacent area observed in the field.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rafek, A.G.; Jamin, N.; Lai, G.T.; Simon, N.; Hussin, A. Systematic approach to sustainable rock slope stability evaluation. Procedia Chem. 2016, 19, 981–985. [Google Scholar] [CrossRef] [Green Version]
- Ge, Y.; Cao, B.; Tang, H. Rock discontinuities identification from 3d point clouds using artificial neural network. Rock Mech. Rock Eng. 2022, 55, 1705–1720. [Google Scholar] [CrossRef]
- Liu, X.; Shen, Y.; Zhang, P.; Tang, T.; Liu, Y.; An, Y. Deformation characteristics of anti-dip rock slope controlled by discontinuities: A case study. Bull. Eng. Geol. Environ. 2021, 80, 905–915. [Google Scholar] [CrossRef]
- ISRM. Commission on standardization of laboratory and field tests: Suggested methods for the quantitative description of discontinuities in rock masses. Int. J. Rock Mech. Min. Sci. 1978, 15, 319–368. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial laser scanning of rock slope instabilities. Earth Surf. Process. Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Fernandez-Steeger, T.M.; Wiatr, T.; Rodrigues, D.; Azzam, R. Use of terrestrial laser scanning for engineering geological applications on volcanic rock slopes–an example from Madeira island (Portugal). Nat. Hazards Earth Syst. Sci. 2011, 11, 807–817. [Google Scholar] [CrossRef] [Green Version]
- Kong, D.; Wu, F.; Saroglou, C. Automatic identification and characterization of discontinuities in rock masses from 3D point clouds. Eng. Geol. 2020, 265, 105442. [Google Scholar] [CrossRef]
- Dong, X.J.; Huang, R.Q. Application of 3D laser scanning technology to geologic survey of high-steep slope. Chin. J. Rock Mech. Eng. 2006, 25, 3629–3635. [Google Scholar]
- Bingshun, H.; Liuqian, D.; Ping, S. Application of 3D laser scanning system in rock structure surface identification. J. China Inst. Water Resour. Hydropower Res. 2007, 1, 43–48. [Google Scholar]
- Yunfeng, G.; Ding, X.; Huiming, T.; Binbin, Z.; Liangqing, W.; Yong, C. Intelligent identification and information extraction of rock structure surface based on 3D laser scanning technology. J. Rock Mech. Eng. 2017, 36, 3050–3061. [Google Scholar]
- Fengyan, W.; Jianping, C.; Hemin, P. Application of digital close-up photogrammetry to extract fracture trace length information of rock masses. World Geol. 2006, 1, 39–42. [Google Scholar]
- Dongliang, H. Research on the Method of Digital Close-Up Photogrammetry to Obtain Geometric Information of Rock Structure Surface. Master’s Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Bo, H. Structural Surface Acquisition and Geometric Characterization of High-Steep Slopes Based on Non-Contact Photogrammetry. Master’s Thesis, Jilin University, Changchun, China, 2022. [Google Scholar]
- Shuguang, J.; Aibing, J.; Yiqing, Z. Application of UAV Photogrammetry in Geological Investigation of High-steep Slopes. Geotechnics 2018, 3, 1130–1136. [Google Scholar]
- Ye, Z.; Xu, Q.; Liu, Q.; Dong, X.; Wang, X.; Ning, H. Application of Unmanned Aerial Vehicle Oblique Photogrammetry to Investigation of High Slope Rock Structure. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1739–1746. [Google Scholar]
- Chengjin, Z.; Shuhong, W.; Yipeng, R.; Zihan, S. UAV photogrammetry of slope structural surface and block stability analysis. J. Northeast. Univ. 2019, 40, 1636–1640. [Google Scholar]
- Wang, S.; Zhang, Z.; Wang, C.; Zhu, C.; Ren, Y. Multistep rocky slope stability analysis based on unmanned aerial vehicle photogrammetry. Environ. Earth Sci. 2019, 78, 260. [Google Scholar] [CrossRef]
- Devoto, S.; Macovaz, V.; Mantovani, M.; Soldati, M.; Furlani, S. Advantages of Using UAV Digital Photogrammetry in the Study of Slow-Moving Coastal Landslides. Remote Sens. 2020, 12, 3566. [Google Scholar] [CrossRef]
- Francioni, M.; Salvini, R.; Stead, D.; Coggan, J. Improvements in the integration of remote sensing and rock slope modelling. Nat. Hazards. 2018, 90, 975–1004. [Google Scholar] [CrossRef] [Green Version]
- Menegoni, N.; Giordan, D.; Perotti, C.; Tannant, D.D. Detection and geometric characterization of rock mass discontinuities using a 3D high-resolution digital outcrop model generated from RPAS imagery-Ormea rock slope. Italy. Eng. Geol. 2019, 252, 145–163. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications-A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Ismail, A.; Safuan, A.R.A.; Sa’ari, R.; Mustaffar, M.; Abdullah, R.A.; Kassim, A.; Yusof, N.M.; Rahaman, N.A.; Kalatehjari, R. Application of combined terrestrial laser scanning and unmanned aerial vehicle digital photogrammetry method in high rock slope stability analysis: A case study. Measurement 2022, 195, 111161. [Google Scholar] [CrossRef]
- Brooke-Holland, L. Unmanned Aerial Vehicles (Drones): An Introduction; House of Commons Library: London, UK, 2012. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Dong, X. A Comprehensive Application Study of 3D Spatial Imaging Technology in Geological Engineering. Ph.D. Thesis, Chengdu University of Technology, Chengdu, China, 2015. [Google Scholar]
- Li, B.; Cheng, Z.; Dang, G.; Jin, S. A review of 3D point cloud normal vector estimation. Comput. Eng. Appl. 2010, 46, 1–7. [Google Scholar]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface reconstruction from unorganized points. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, Chicago, IL, USA, 26–31 July 1992; pp. 71–78. [Google Scholar]
- Amenta, N.; Bern, M. Surface Reconstruction by Voronoi Filtering. Discret. Comput. Geom. 1999, 22, 481–504. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Meer, P.; Park, R. Robust adaptive segmentation of range images. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 200–205. [Google Scholar]
- Dey, T.; Li, G.; Sun, J. Normal estimation for point clouds: A comparison study for a Voronoi based method. In Proceedings of the Eurographics/IEEE VGTC Symposium Point-Based Graphics, New York, NY, USA, 21–22 June 2005; pp. 39–46. [Google Scholar]
- Chen, C.; He, K.; Yu, J.; Mao, F.; Xue, X.; Li, F. Structural surface identification of high and steep slopes based on UAV close-in photography. J. Hunan Univ. 2022, 49, 145–154. [Google Scholar]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Zhu, H.; Li, X. Automatic extraction of discontinuity orientation from rock mass surface 3D point cloud. Comput. Geosci. 2016, 95, 18–31. [Google Scholar] [CrossRef]
- Guo, J.; Liu, S.; Zhang, P.; Wu, L.; Zhou, W.; Yu, Y. Towards semi-automatic rock mass discontinuity orientation and set analysis from 3D point clouds. Comput. Geosci. 2017, 103, 164–172. [Google Scholar] [CrossRef]
- Jimenez-Rodriguez, R.; Sitar, N. A spectral method for clustering of rock discontinuity sets. Int. J. Rock Mech. Min. Sci. 2006, 43, 1052–1061. [Google Scholar] [CrossRef]
- Jimenez, R. Fuzzy spectral clustering for identification of rock discontinuity sets. Rock Mech. Rock. Eng. 2008, 41, 929–939. [Google Scholar] [CrossRef]
- Xu, L.M.; Chen, J.P.; Wang, Q.; Zhou, F.J. Fuzzy C-means cluster analysis based on mutative scale chaos optimization algorithm for the grouping of discontinuity sets. Rock Mech. Rock. Eng. 2013, 46, 189–198. [Google Scholar] [CrossRef]
- Gao, F.; Chen, D.; Zhou, K.; Niu, W.; Liu, H. A fast clustering method for identifying rock discontinuity sets. KSCE J. Civ. Eng. 2019, 23, 556–566. [Google Scholar] [CrossRef]
- Peitao, W.; Tuo, Q.; Zhengjun, H.; Fenhua, R.; Meifeng, C. Research on rapid identification method of rock structure surface information based on 3D point cloud. J. Rock Mech. Eng. 2021, 40, 503–519. [Google Scholar]
- Kulatilake, P.H. Fitting Fisher distributions to discontinuity orientation data. J. Geol. Educ. 1985, 33, 266–269. [Google Scholar] [CrossRef]
- Slob, S. Automated Rock Mass Characterisation Using 3-D Terrestrial Laser Scanning. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Baghbanan, A.; Jing, L. Hydraulic properties of fractured rock masses with correlated fracture length and aperture. Int. J. Rock Mech. Min. Sci. 2007, 44, 704–719. [Google Scholar] [CrossRef]
- Deng, F. Stability Analysis Method of Rocky Slopes Based on Equipolar Projection and Reliability. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2018. [Google Scholar]
- Matsimbe, J. Comparative application of photogrammetry, handmapping and android smartphone for geotechnical mapping and slope stability analysis. Open Geosci. 2021, 13, 148–165. [Google Scholar] [CrossRef]
- Adhikary, D.P.; Dyskin, A.V.; Jewell, R.J.; Stewart, D.P. A study of the mechanism of flexural toppling failure of rock slopes. Rock Mech. Rock Eng. 1997, 30, 75. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Category | Value |
| M300 RTK UAV | Sizes | 430 × 420 × 430 mm (folded) |
| Max. takeoff weight | 9 kg | |
| Max. flight altitude | 5000 m | |
| RTK position precision | 1 cm + 1 ppm (horizontal); 1.5 cm + 1 ppm (verticality) | |
| Zenmuse P1 | Weight | 800 g |
| Pixels | 45 million | |
| Precision | Plane: 3 cm, Elevation: 5 cm × GSD = 3 cm |
| Discontinuity Sets | UAV Dir/Dip (°) | Manual Dir/Dip (°) | Error Dir/Dip (°) |
|---|---|---|---|
| J1 | 146/78 | 142/76 | 4/2 |
| J2 | 96/79 | 99/75 | 3/4 |
| J3 | 35/60 | 41/62 | 6/2 |
| Mean error | - | 4.33/2.67 | |
| Discontinuity Sets | Dir (°) | Dip (°) | Proportions (%) |
|---|---|---|---|
| J1 | 191 | 71 | 38.3 |
| J2 | 92 | 81 | 7.3 |
| J3 | 271 | 75 | 10.7 |
| J4 | 132 | 86 | 28.3 |
| J5 | 163 | 28 | 7.3 |
| J6 | 19 | 25 | 2.0 |
| Material | (kg/m3) | E (GPa) | c (kPa) | (°) | (GPa) | (GPa) |
|---|---|---|---|---|---|---|
| Rock mass | 2940 | 0.556 | 289 | 33.8 | - | - |
| J1 | - | - | 58 | 34.7 | 10 | 1 |
| J6 | - | - | 53 | 31.7 | 10 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, J.; Zhang, X.; Wang, C.; Wang, H.; Wang, H. Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope. Drones 2023, 7, 198. https://doi.org/10.3390/drones7030198
Hao J, Zhang X, Wang C, Wang H, Wang H. Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope. Drones. 2023; 7(3):198. https://doi.org/10.3390/drones7030198
Chicago/Turabian StyleHao, Jianning, Xiuli Zhang, Chengtang Wang, Hao Wang, and Haibin Wang. 2023. "Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope" Drones 7, no. 3: 198. https://doi.org/10.3390/drones7030198