
Fault-Tolerant Control for Carrier-Based UAV Based on Sliding Mode Method

Abstract
:1. Introduction
2. Problem Formulation
2.1. UAV Model
2.2. Actuator Partial Loss Model and Additional Unknown Fault Model
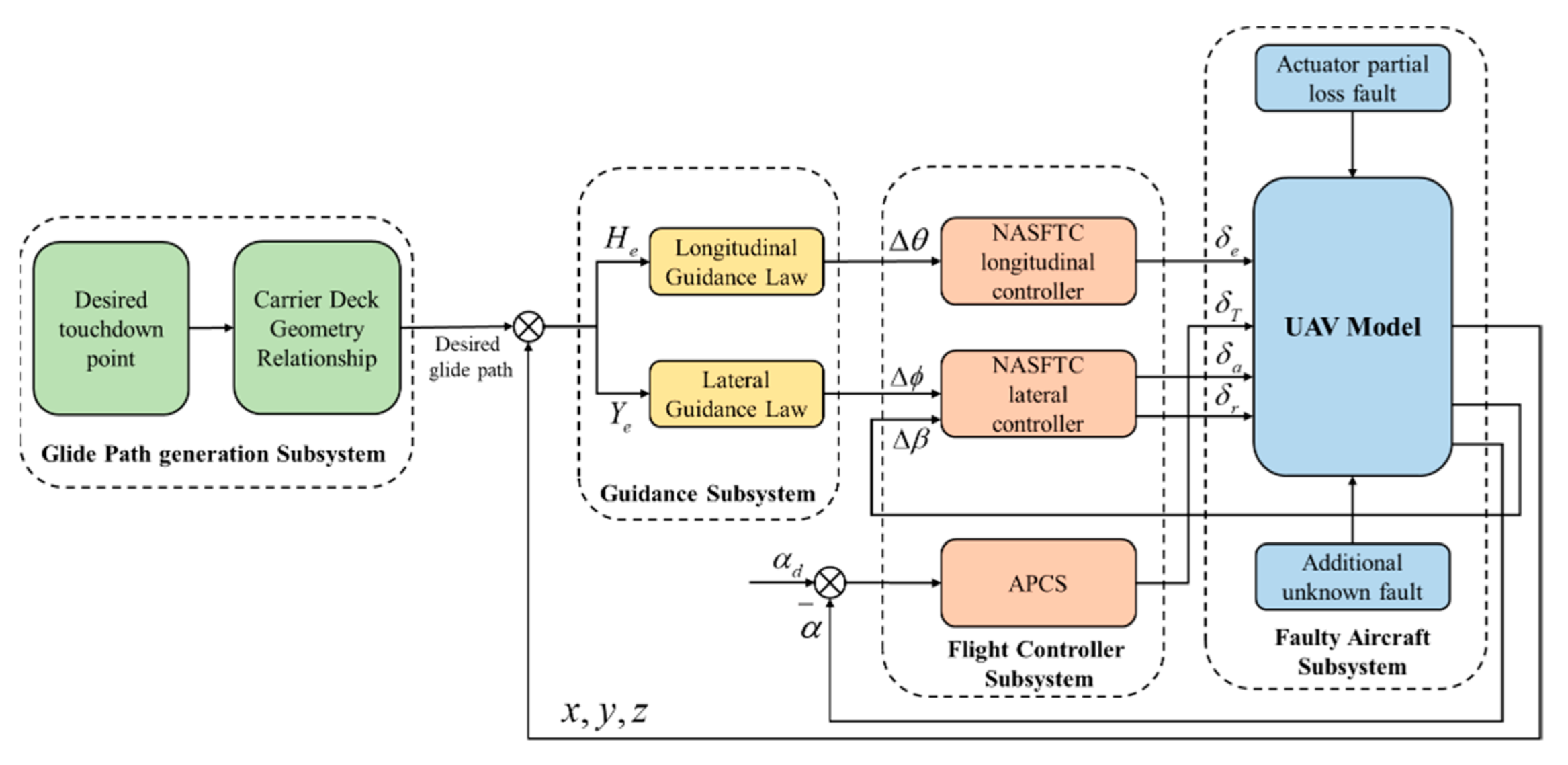
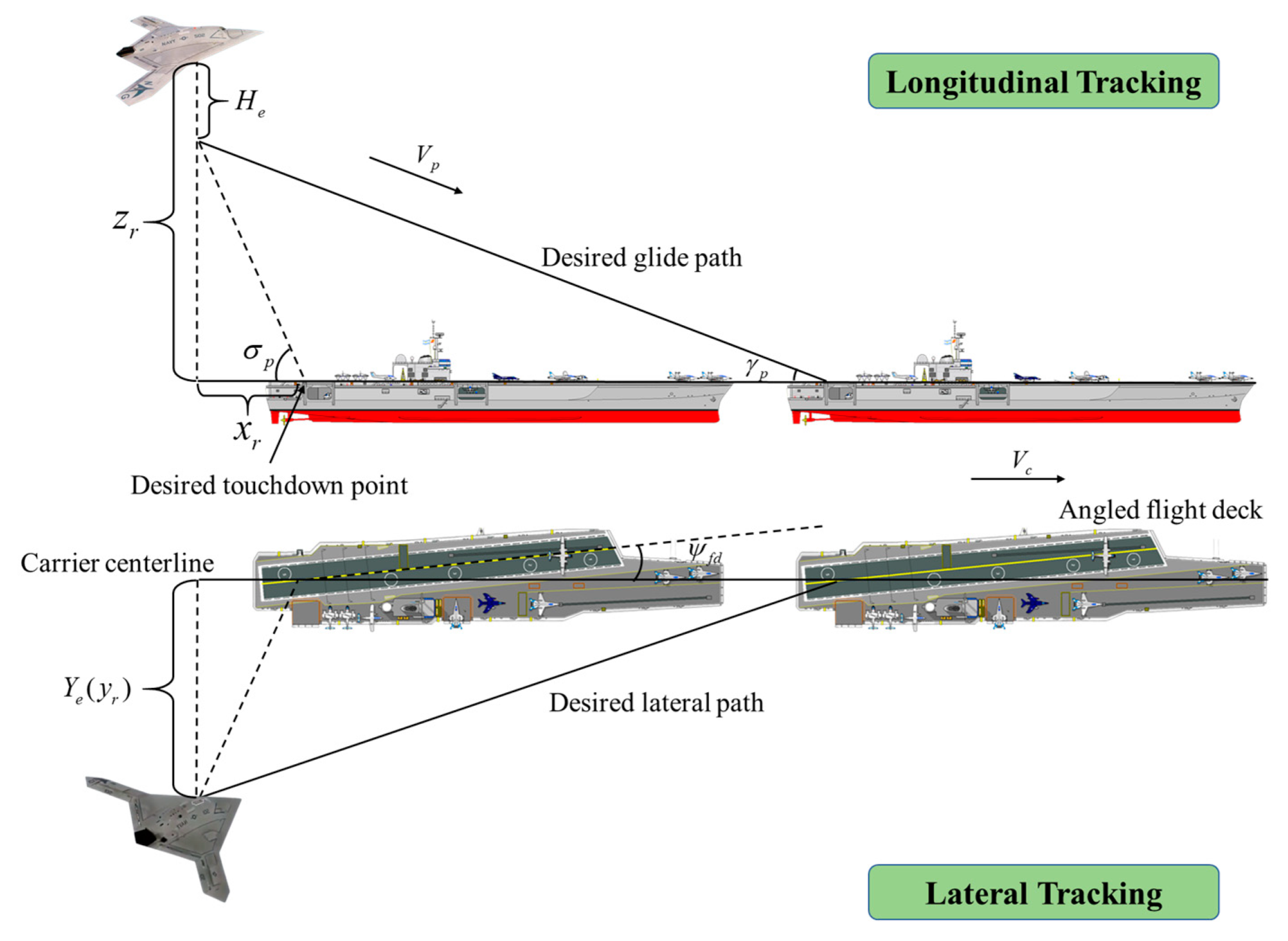
2.3. ACLS Control Framework
3. Controller Design
3.1. RBF Neural Network
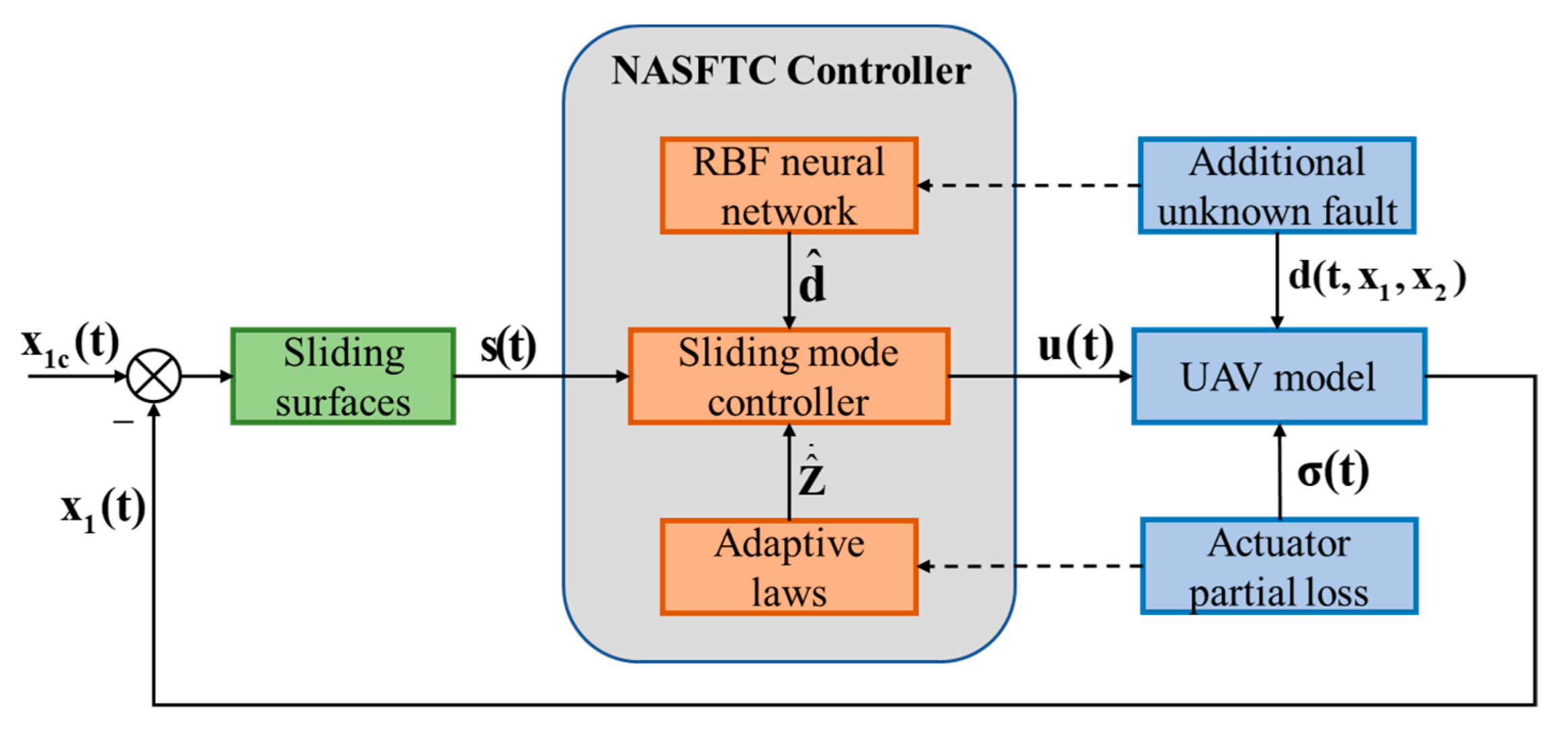
3.2. Controller Design
3.3. Approach Power Compensation System (APCS)
4. Simulation Results and Discussion
4.1. Scenario 1: Only Actuator Partial Loss Fault Is Considered
4.2. Scenario 2: Only Additional Unknown Fault Is Considered
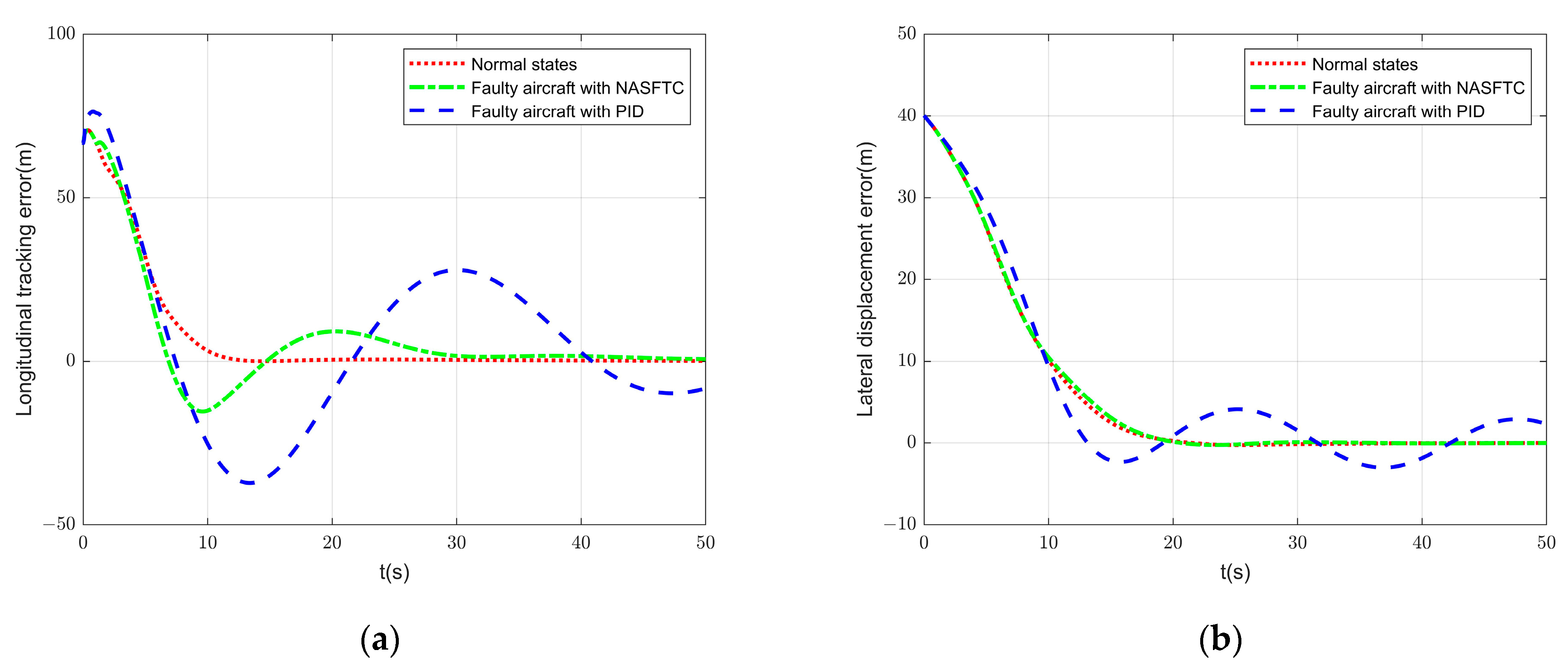
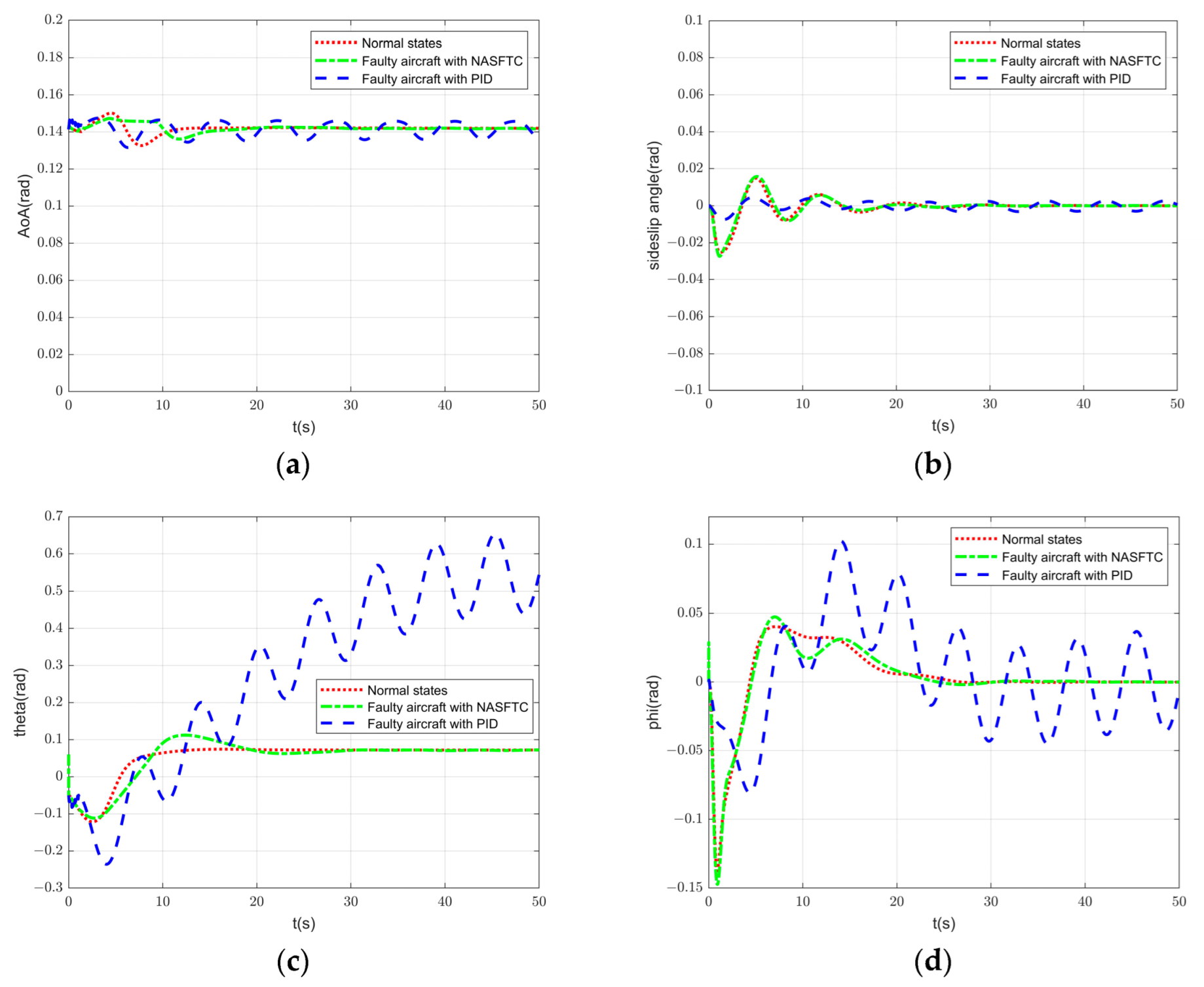
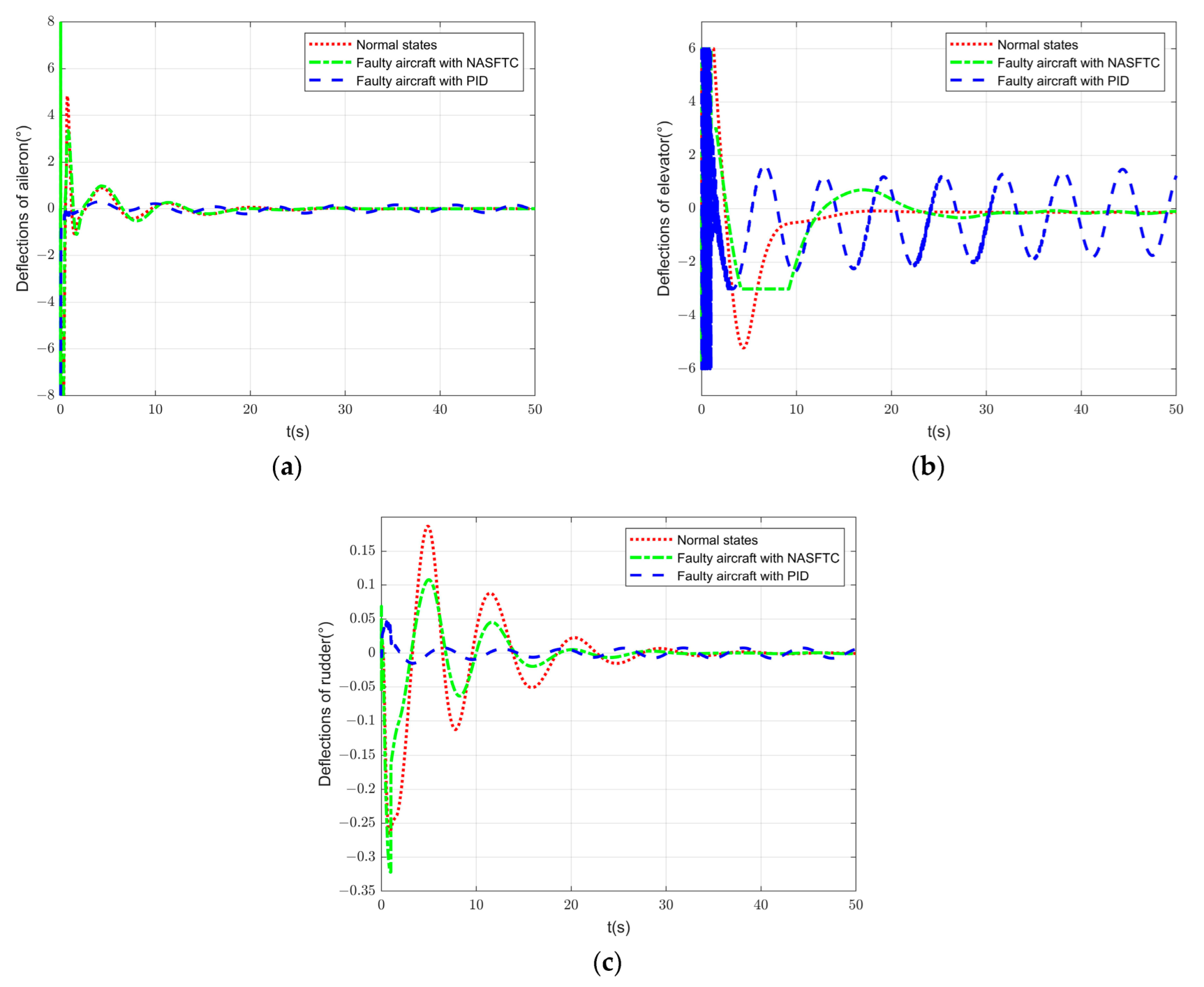
4.3. Scenario 3: Both Actuator Partial Loss and Additional Unknown Faults Are Considered
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhen, Z.; Tao, G.; Yu, C.; Xue, Y. A multivariable adaptive control scheme for automatic carrier landing of UAV. Aerosp. Sci. Technol. 2019, 92, 714–721. [Google Scholar] [CrossRef]
- Zhu, Q.; Yang, Z. Design of Air-Wake Rejection Control for Longitudinal Automatic Carrier Landing Cyber-Physical System. Comput. Electr. Eng. 2020, 84, 106637. [Google Scholar] [CrossRef]
- Guan, Z.; Liu, H.; Zheng, Z.; Lungu, M.; Ma, Y. Fixed-time control for automatic carrier landing with disturbance. Aerosp. Sci. Technol. 2021, 108, 106403. [Google Scholar] [CrossRef]
- Guan, Z.; Ma, Y.; Zheng, Z.; Guo, N. Prescribed performance control for automatic carrier landing with disturbance. Nonlinear Dyn. 2018, 94, 1335–1349. [Google Scholar] [CrossRef]
- Guan, Z.; Liu, H.; Zheng, Z.; Ma, Y.; Zhu, T. Moving path following with integrated direct lift control for carrier landing. Aerosp. Sci. Technol. 2022, 120, 107247. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Chang, B.; Wu, W.-H. Adaptive constrained backstepping controller with prescribed performance methodology for carrier-based UAV. Aerosp. Sci. Technol. 2019, 92, 55–65. [Google Scholar] [CrossRef]
- Sun, X.; Jiang, J.; Zhen, Z.; Wei, R. Adaptive fuzzy direct lift control of aircraft carrier-based landing. J. Northwestern Polytech. Univ. 2021, 39, 359–366. [Google Scholar] [CrossRef]
- Rao, D.M.K.K.V.; Go, T.H. Automatic landing system design using sliding mode control. Aerosp. Sci. Technol. 2014, 32, 180–187. [Google Scholar]
- Zhen, Z.; Yu, C.; Jiang, S.; Jiang, J. Adaptive Super-Twisting Control for Automatic Carrier Landing of Aircraft. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 984–997. [Google Scholar] [CrossRef]
- Duan, H.; Yuan, Y.; Zeng, Z. Automatic Carrier Landing System with Fixed Time Control. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3586–3600. [Google Scholar] [CrossRef]
- Zhen, Z.; Jiang, S.; Ma, K. Automatic carrier landing control for unmanned aerial vehicles based on preview control and particle filtering. Aerosp. Sci. Technol. 2018, 81, 99–107. [Google Scholar] [CrossRef]
- Ali, K.; Mehmood, A.; Iqbal, J. Fault-tolerant scheme for robotic manipulator—Nonlinear robust back-stepping control with friction compensation. PLoS ONE 2021, 16, e0256491. [Google Scholar] [CrossRef]
- Ye, H.; Meng, Y. An observer-based adaptive fault-tolerant control for hypersonic vehicle with unexpected centroid shift and input saturation. ISA Trans. 2022, 130, S0019057822001550. [Google Scholar] [CrossRef]
- Liu, Y.; Hong, S.; Zio, E.; Liu, J. Integrated fault estimation and fault-tolerant control for a flexible regional aircraft. Chin. J. Aeronaut. 2022, 35, 390–399. [Google Scholar] [CrossRef]
- Ma, J.; Peng, C. Adaptive model-free fault-tolerant control based on integral reinforcement learning for a highly flexible aircraft with actuator faults. Aerosp. Sci. Technol. 2021, 119, 107204. [Google Scholar] [CrossRef]
- Chao, D.; Qi, R.; Jiang, B. Adaptive fault-tolerant attitude control for hypersonic reentry vehicle subject to complex uncertainties. J. Frankl. Inst. 2022, 359, 5458–5487. [Google Scholar] [CrossRef]
- Zhang, R.; Qiao, J.; Li, T.; Guo, L. Robust fault-tolerant control for flexible spacecraft against partial actuator failures. Nonlinear Dyn. 2014, 76, 1753–1760. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Passive Actuator Fault-Tolerant Control for a Class of Overactuated Nonlinear Systems and Applications to Electric Vehicles. IEEE Trans. Veh. Technol. 2013, 62, 972–985. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, Y. Design of passive fault-tolerant flight controller against actuator failures. Chin. J. Aeronaut. 2015, 28, 180–190. [Google Scholar] [CrossRef] [Green Version]
- Lamouchi, R.; Amairi, M.; Raïssi, T.; Aoun, M. Active fault tolerant control using zonotopic techniques for linear parameter varying systems: Application to wind turbine system. Eur. J. Control 2022, 67, 100700. [Google Scholar] [CrossRef]
- Liu, J.; Sun, L.; Tan, W.; Liu, X.; Li, G. Finite time observer based incremental nonlinear fault-tolerant flight control. Aerosp. Sci. Technol. 2020, 104, 105986. [Google Scholar] [CrossRef]
- Awan, Z.S.; Ali, K.; Iqbal, J.; Mehmood, A. Adaptive backstepping based sensor and actuator fault tolerant control of a manipulator. J. Electr. Eng. Tech. 2019, 14, 2497–2504. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Yang, Z.; Zhang, C. Active fault-tolerant control strategy of large civil aircraft under elevator failures. Chin. J. Aeronaut. 2015, 28, 1658–1666. [Google Scholar] [CrossRef] [Green Version]
- Cao, T.; Gong, H.; Cheng, P.; Xue, Y. A novel learning observer-based fault-tolerant attitude control for rigid spacecraft. Aerosp. Sci. Technol. 2022, 128, 107751. [Google Scholar] [CrossRef]
- Hosseinnajad, A.; Loueipour, M. Design of finite-time active fault tolerant control system with real-time fault estimation for a remotely operated vehicle. Ocean Eng. 2021, 241, 110063. [Google Scholar] [CrossRef]
- Fan, W.; Xu, B.; Zhang, Y.; Tang, S.; Xiang, C. Adaptive fault-tolerant control of a novel ducted-fan aerial robot against partial actuator failure. Aerosp. Sci. Technol. 2022, 122, 107371. [Google Scholar] [CrossRef]
- Zhu, Q.; Meng, X. Fault tolerant control for longitudinal carrier landing system with application to aircraft. Control Theory Appl. 2017, 34, 1311–1320. [Google Scholar]
- Xue, Y.X.; Zhen, Z.Y.; Yang, L.Q.; Wen, L.D. Adaptive fault-tolerant control for carrier-based UAV with actuator failures. Aerosp. Sci. Technol. 2020, 107, 106227. [Google Scholar] [CrossRef]
- Zheng, F.; Gong, H.; Zhen, Z. Adaptive constraint backstepping fault-tolerant control for small carrier-based unmanned aerial vehicle with uncertain parameters. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 407–425. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems, 3rd ed.; John Wiley and Sons, Inc.: New York, NY, USA, 2015. [Google Scholar]
- Zhang, Y.; Zhou, Y.; Yan, X.; Yin, D.; Qian, G. Research on Two Kinds of Approach Power Compensator System of Carrier based Aircraft Based on Hdot Command. Adv. Aeronaut. Sci. Eng. 2022, 13, 140–146. [Google Scholar]
- Liu, Y.; Ma, G.; Lyu, Y.; Wang, P. Neural network-based reinforcement learning control for combined spacecraft attitude tracking maneuvers. Neurocomputing 2022, 484, 67–78. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Z.; Jiang, F.; Li, J. Adaptive neural network control of nonlinear systems with unknown dynamics. Adv. Space Res. 2021, 67, 1114–1123. [Google Scholar] [CrossRef]
- Shen, S.; Xu, J. Adaptive neural network-based active disturbance rejection flight control of an unmanned helicopter. Aerosp. Sci. Technol. 2021, 119, 107062. [Google Scholar] [CrossRef]
- Jin, X.; He, T.; Wu, X.; Wang, H.; Chi, J. Robust adaptive neural network-based compensation control of a class of quadrotor aircrafts. J. Frankl. Inst. 2020, 357, 12241–12263. [Google Scholar] [CrossRef]
- Xie, T.; Yu, H.; Wilamowski, B. Comparison between Traditional Neural Networks and Radial Basis Function Networks. In Proceedings of the IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; p. 12207181. [Google Scholar]
- Ahmad, S.; Uppal, A.A.; Azam, M.R.; Iqbal, J. Chattering Free Sliding Mode Control and State Dependent Kalman Filter Design for Underground Gasification Energy Conversion Process. Electronics 2023, 12, 876. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Index | Normal States | NASFTC | PID |
|---|---|---|---|---|
| Longitudinal channel | IAE | 358 | 460 | 2456 |
| ITAE | 1454 | 3952 | 64715 | |
| Lateral channel | IAE | 294 | 297 | 359 |
| ITAE | 1543 | 1558 | 2890 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Z.; Kan, Z.; Zhen, C.; Shao, H.; Li, D. Fault-Tolerant Control for Carrier-Based UAV Based on Sliding Mode Method. Drones 2023, 7, 194. https://doi.org/10.3390/drones7030194
Yao Z, Kan Z, Zhen C, Shao H, Li D. Fault-Tolerant Control for Carrier-Based UAV Based on Sliding Mode Method. Drones. 2023; 7(3):194. https://doi.org/10.3390/drones7030194
Chicago/Turabian StyleYao, Zhuoer, Zi Kan, Chong Zhen, Haoyuan Shao, and Daochun Li. 2023. "Fault-Tolerant Control for Carrier-Based UAV Based on Sliding Mode Method" Drones 7, no. 3: 194. https://doi.org/10.3390/drones7030194