
Finite-Interval Stability Analysis of Impulsive Fractional-Delay Dynamical System

Abstract
:1. Introduction
- The solution’s existence and its uniqueness for the considered fractional system are discussed using a delayed matrix Mittag-Leffler argument.
- Stability analysis of the system is studied using the approach of few direct results from functional analysis and using the method of GI inequality.
- Further, the sufficient bounds for the FTS of our considered system are analysed with impulsive perturbations.
2. Prerequisites
3. Formulation of Solution
- For we have , and
- For there exists nonzero values and in such a way that
- where .
- For all and there exist constants and , where , such that
- Part 1:
- Preliminary estimation.
- Part 2:
- Solution existence and uniqueness locally.
- Part 3:
- Solution extension
4. Finite-Time Stability Results
- Let in such a way that and
- There exists a , such that for , and ,
- Let be a positive value, such that and
5. Extension to Impulsive Conditions
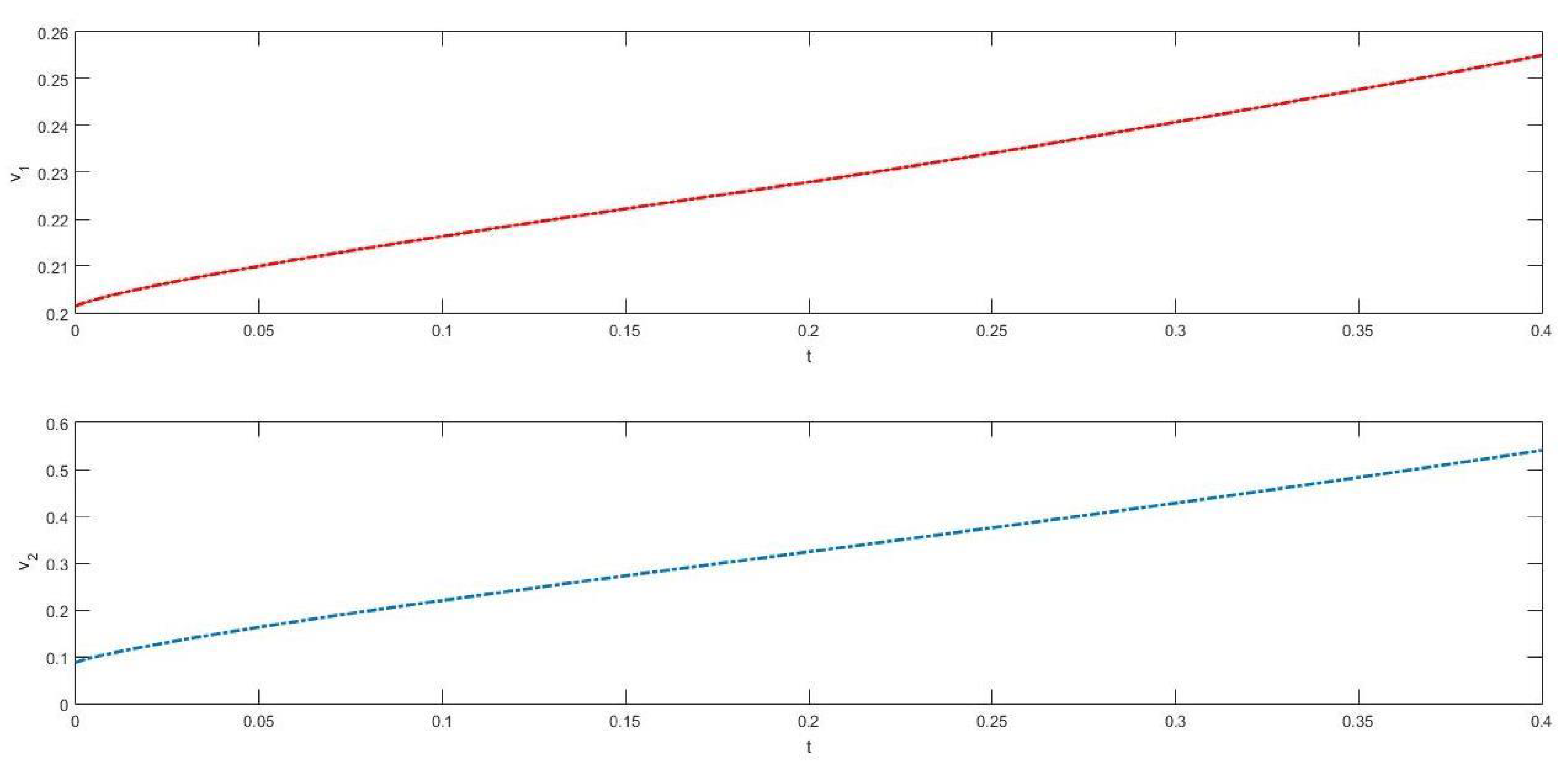
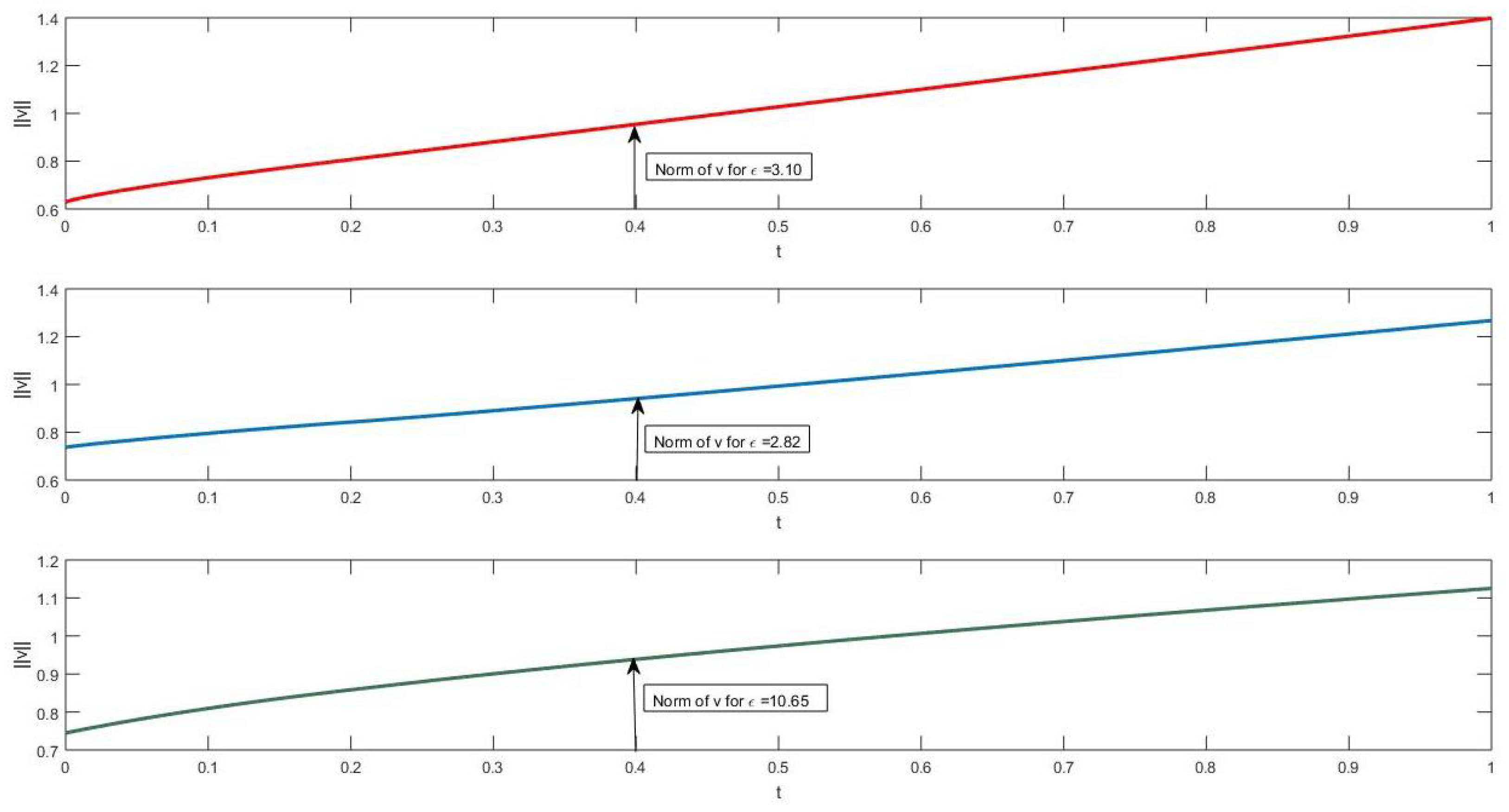
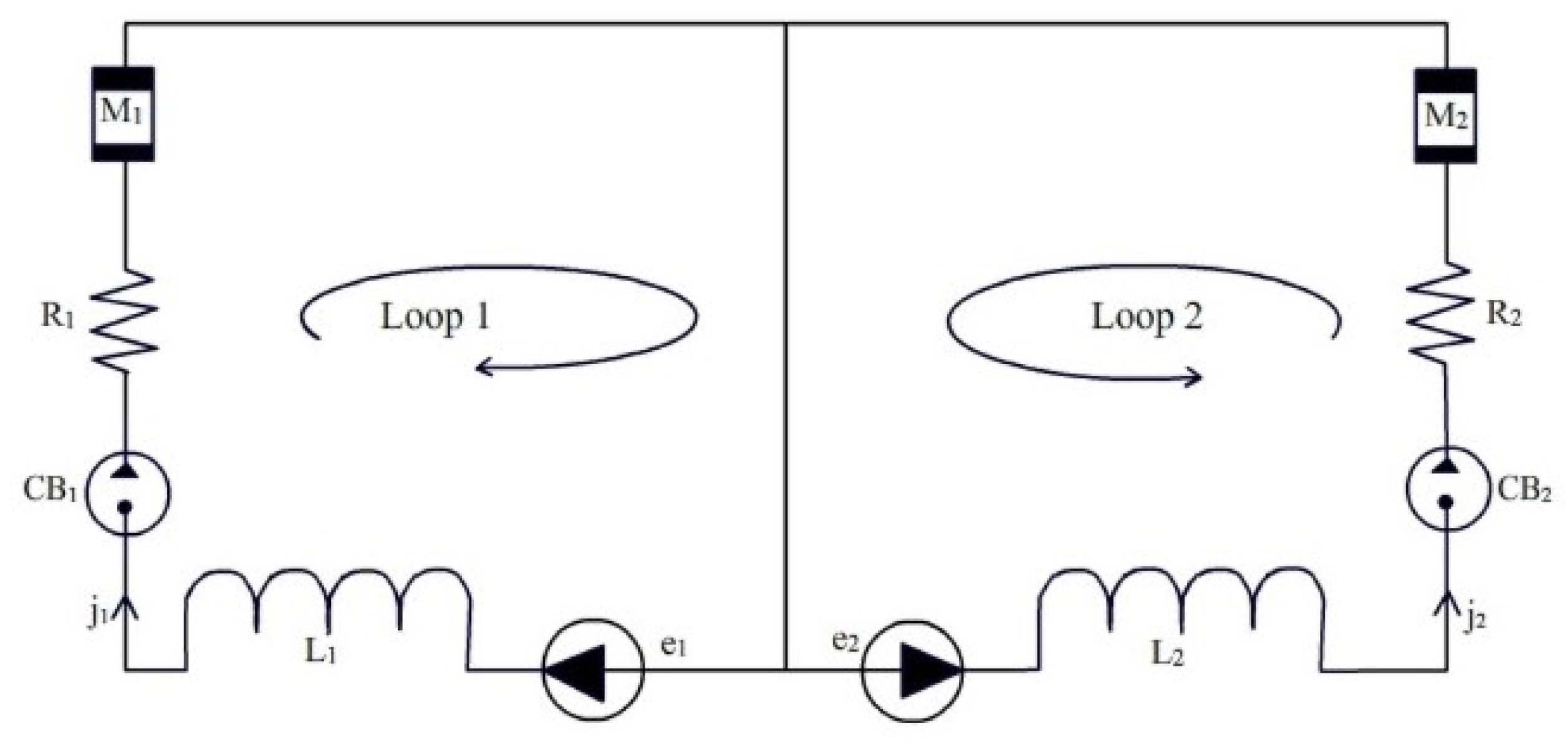
6. Examples
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abbas, S.; Benchohra, M.; Lazreg, J.E.; Nieto, J.J.; Zhou, Y. Fractional differential equations and inclusions. In Classical and Advanced Topics; World Scientific: Singapore, 2023. [Google Scholar]
- Magin, R. Fractional Calculus in Bioengineering. Crit. Rev. Biomed. Eng. 2004, 32, 1–104. [Google Scholar] [CrossRef]
- Nieto, J.J. Fractional euler numbers and generalized proportional fractional logistic differential equation. Fract. Calc. Appl. Anal. 2022, 25, 876–886. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional Dynamics: Applications of Fractional Calculus to Dynamics of Particles, Fields and Media; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Hernández, E.; O’Regan, D. On a new class of abstract impulsive differential equations. Proc. Am. Math. Soc. 2013, 141, 1641–1649. [Google Scholar] [CrossRef]
- Zhang, X.; Li, C.; Huang, T. Impacts of state-dependent impulses on the stability of switching Cohen-Grossberg neural networks. Adv. Differ. Equ. 2017, 316, 1–21. [Google Scholar] [CrossRef]
- Wang, Q.; Lu, D.; Fang, Y. Stability analysis of impulsive fractional differential systems with delay. Appl. Math. Lett. 2015, 40, 1–6. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M.; Nieto, J.J. Caputo-Fabrizio fractional differential equations with non instantaneous impulses. Rend. Circ. Mat. Palermo II 2022, 71, 131–144. [Google Scholar] [CrossRef]
- Fečkan, M.; Zhou, Y.; Wang, J.R. On the concept and existence of solution for impulsive fractional differential equations. Commun. Nonlinear. Sci. Numer. Simul. 2022, 17, 3050–3060. [Google Scholar]
- Lee, L.; Liu, Y.; Liang, J.; Cai, X. Finite time stability of nonlinear impulsive systems and its applications in sampled-data systems. ISA Trans. 2015, 57, 172–178. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Wang, G.; Ahmad, B.; Zhang., L.; Nieto, J.J. Comments on the concept of existence of solution for impulsive fractional differential equations. Commun. Nonlinear. Sci. Numer. Simul. 2013, 19, 401–403. [Google Scholar] [CrossRef]
- You, Z.; Wang, J.R. Stability of impulsive delay differential equations. J. Appl. Math. 2018, 56, 253–268. [Google Scholar] [CrossRef]
- You, Z. On the exponential stability of nonlinear delay system with impulses. IMA J. Math. Control Inf. 2017, 35, 773–803. [Google Scholar] [CrossRef]
- You, Z.; Wang, J.R.; Zhou, Y.; Feˇ ckan, M. Representation of Solutions and Finite Time Stability for Delay Differential Systems with Impulsive Effects. Int. J. Nonlinear Sci. Numer. Simul. 2019, 20, 205–221. [Google Scholar] [CrossRef]
- Makhlouf, A.B.; Baleanu, D. Finite Time Stability of Fractional Order Systems of Neutral Type. Fractal Fract. 2022, 6, 289. [Google Scholar] [CrossRef]
- Du, F.; Lu, J.G. New criterion for finite-time stability of fractional delay systems. App. Math. Lett. 2020, 104, 106248. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Balachandran, K. Finite-time stability of fractional-order stochastic singular systems with time delay and white noise. J. Complex. 2016, 21, 370–379. [Google Scholar] [CrossRef]
- Mchiri, L.; Makhlouf, A.B.; Baleanu, D.; Rhaima, M. Finite-time stability of linear stochastic fractional-order system with time delay. Adv. Differ. Equ. 2021, 1, 345. [Google Scholar] [CrossRef]
- Luo, D.; Mengquan, T.; Quanxin, Z. Some results on finite time stability of stochastic fractional-order delay differential equations. Chaos Solitons Fractals 2022, 158, 111996. [Google Scholar] [CrossRef]
- Yang, Y.; He, Y.; Wang, Y.; Wu, M. Stability analysis of fractional-order neural networks: An LMI approach. Neurocomputing 2018, 285, 82–93. [Google Scholar] [CrossRef]
- Khusainov, D.Y.; Shuklin, G.V. Linear autonomous time-delay system with permutation matrices solving. Stud. Univ. Zilina 2003, 17, 101–108. [Google Scholar]
- Elshenhab, A.M.; Wang, X.T. Representation of solutions for linear fractional systems with pure delay and multiple delays. Math. Methods Appl. Sci. 2021, 44, 12835–12850. [Google Scholar] [CrossRef]
- Anh, P.T.; Doan, T.S.; Huong, P.T. A variation of constant formula for Caputo fractional stochastic differential equation. Stat. Probab. Lett. 2019, 145, 351–358. [Google Scholar] [CrossRef]
- Ahmadova, A.; Mahmudov, N.I. Existence and uniqueness results for a class of fractional stochastic neutral differential equations. Chaos Solitons Fractals 2020, 139, 110253. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, J.R. Finite time stability analysis of systems based on delayed exponential matrix. Appl. Math. Comput. 2017, 55, 335–351. [Google Scholar] [CrossRef]
- Liang, C.; Wang, J.R.; O’Regan, D. Representation of a solution for a fractional linear system with pure delay. Appl. Math. Lett. 2017, 44, 12835–12850. [Google Scholar] [CrossRef]
- Li, M.; Wang, J.R. Finite time stability of fractional delay differential equations. Appl. Math. Lett. 2017, 64, 170–176. [Google Scholar] [CrossRef]
- Li, M.; Wang, J.R. Exploring delayed Mittag-Leffler type matrix functions to study finite time stability of fractional delay differential equations. Appl. Math. Lett. 2018, 324, 254–265. [Google Scholar] [CrossRef]
- Zada, A.; Pervaiz, B.; Subramanian, M.; Popa, I.L. Finite time stability for nonsingular impulsive first order delay differential systems. Appl. Math.Comput. 2022, 421, 126943. [Google Scholar] [CrossRef]
- Elshenhab, A.M.; Wang, X.T.; Mofarreh, F.; Bazighifan, O. Exact solutions and finite time stability of linear conformable fractional systems with pure delay. CMES 2022, 134, 1–14. [Google Scholar] [CrossRef]
- Farid, Y.; Ruggiero, F. Finite-time extended state observer and fractional-order sliding mode controller for impulsive hybrid port-Hamiltonian systems with input delay and actuators saturation: Application to ball-juggler robots. Mech. Mach. Theory 2022, 167, 104577. [Google Scholar] [CrossRef]
- Area, I.; Fernández, F.J.; Nieto, J.J.; Adrián, F.; Tojo, F. Concept and solution of digital twin based on a Stieltjes differential equation. Math. Methods Appl. Sci. 2022, 45, 7451–7465. [Google Scholar] [CrossRef]
- Lazarevic, M.P.; Spasic, A.M. Finite-time stability analysis of fractional-order time-delay systems: Gronwall’s approach. Math. Comput. Model. 2009, 49, 475–481. [Google Scholar] [CrossRef]
- An, T.V.; Vu, H.; Hoa, N.V. Finite-time stability of fractional delay differential equations involving the generalized Caputo fractional derivative with non-instantaneous impulses. Math. Methods Appl. Sci. 2022, 45, 4938–4955. [Google Scholar]
- Wu, K.N.; Na, M.Y.; Wang, L.; Ding, X.; Wu, B. Finite-time stability of impulsive reaction–diffusion systems with and without time delay. Appl. Math. Comput. 2019, 363, 124591. [Google Scholar] [CrossRef]
- Ye, H.; Gao, J.; Ding, Y. A generalized gronwall inequality and its application to a fractional differential equation. J. Math. Anal. 2007, 328, 1075–1081. [Google Scholar] [CrossRef]
- Ahmad, M.; Zada, A.; Ghaderi, M.; George, R.; Rezapour, S. On the Existence and Stability of a Neutral Stochastic Fractional Differential System. Fractal Fract. 2022, 6, 203. [Google Scholar] [CrossRef]
- Nawaz, M.; Jiang, W.; Sheng, J. The controllability of nonlinear fractional differential system with pure delay. Adv. Differ. Equ. 2020, 2020, 183. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiao, F. Existence of mild solutions for fractional neutral evolution equations. Comput. Math. Appl. 2010, 59, 1063–1077. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Shao, Y.; Chen, C.C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica 2019, 106, 339–348. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, W.; Wang, J.R. Finite time stability of semilinear delay differential equations. Nonlinear Dyn. 2017, 89, 713–722. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Theorem | q | h | (FTS) | |||||
|---|---|---|---|---|---|---|---|---|
| 4.1 | 0.2 | 0.8 | 0.4 | 0.2 | 0.21 | 3.053 | 3.10 | yes |
| 4.2 | 0.2 | 0.8 | 0.4 | 0.2 | 0.21 | 2.81 | 2.82 (optimal) | yes |
| 4.3 | 0.2 | 0.8 | 0.4 | 0.2 | 0.21 | 10.64 | 10.65 | yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaliraj, K.; Lakshmi Priya, P.K.; Nieto, J.J. Finite-Interval Stability Analysis of Impulsive Fractional-Delay Dynamical System. Fractal Fract. 2023, 7, 447. https://doi.org/10.3390/fractalfract7060447
Kaliraj K, Lakshmi Priya PK, Nieto JJ. Finite-Interval Stability Analysis of Impulsive Fractional-Delay Dynamical System. Fractal and Fractional. 2023; 7(6):447. https://doi.org/10.3390/fractalfract7060447
Chicago/Turabian StyleKaliraj, K., P. K. Lakshmi Priya, and Juan J. Nieto. 2023. "Finite-Interval Stability Analysis of Impulsive Fractional-Delay Dynamical System" Fractal and Fractional 7, no. 6: 447. https://doi.org/10.3390/fractalfract7060447