
Control and Synchronization of a Novel Realizable Nonlinear Chaotic System

Abstract
:1. Introduction
2. New Chaotic System-Analysis
2.1. Dissipativity
2.2. Symmetry
2.3. Equilibrium Points and Stability
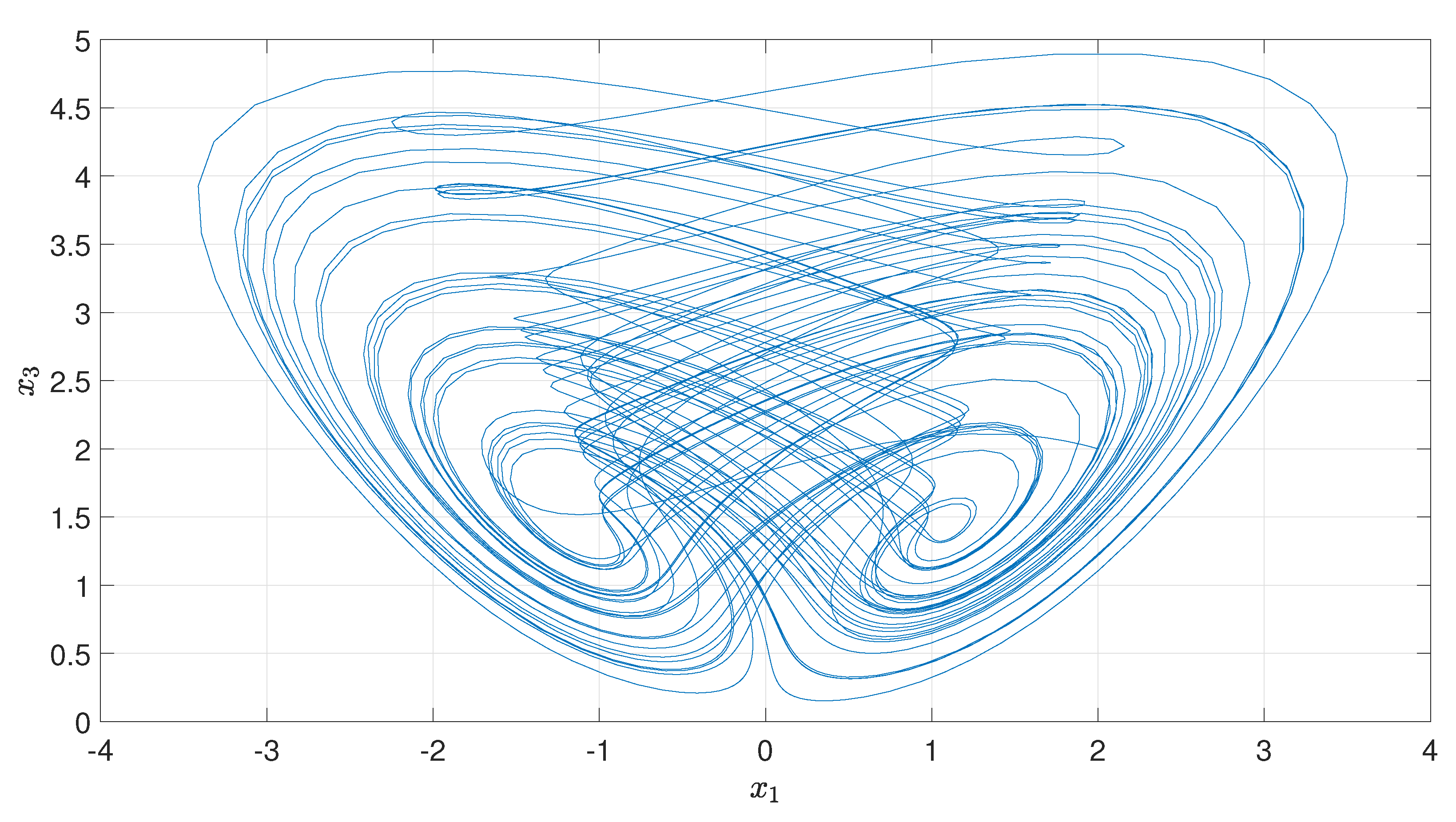
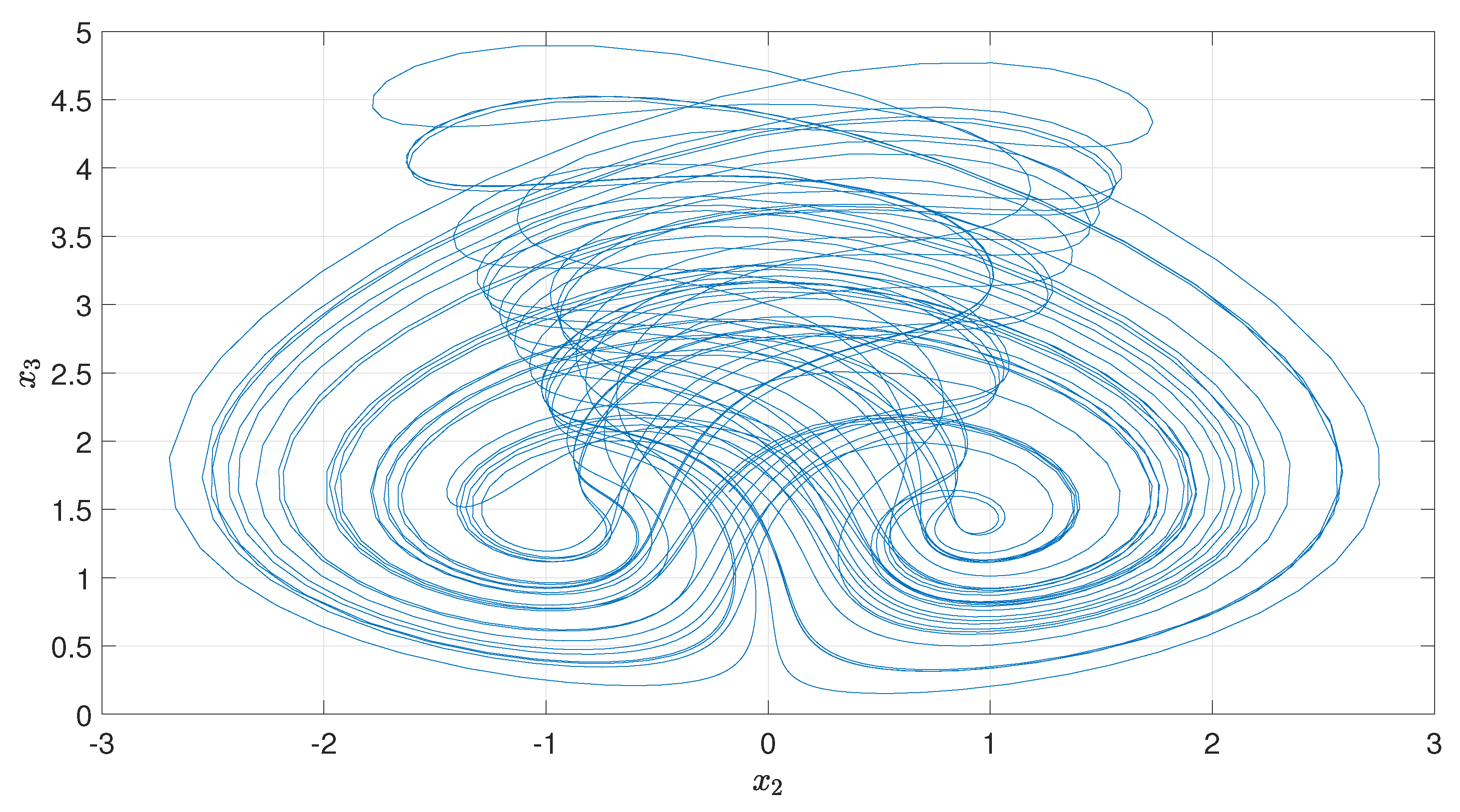
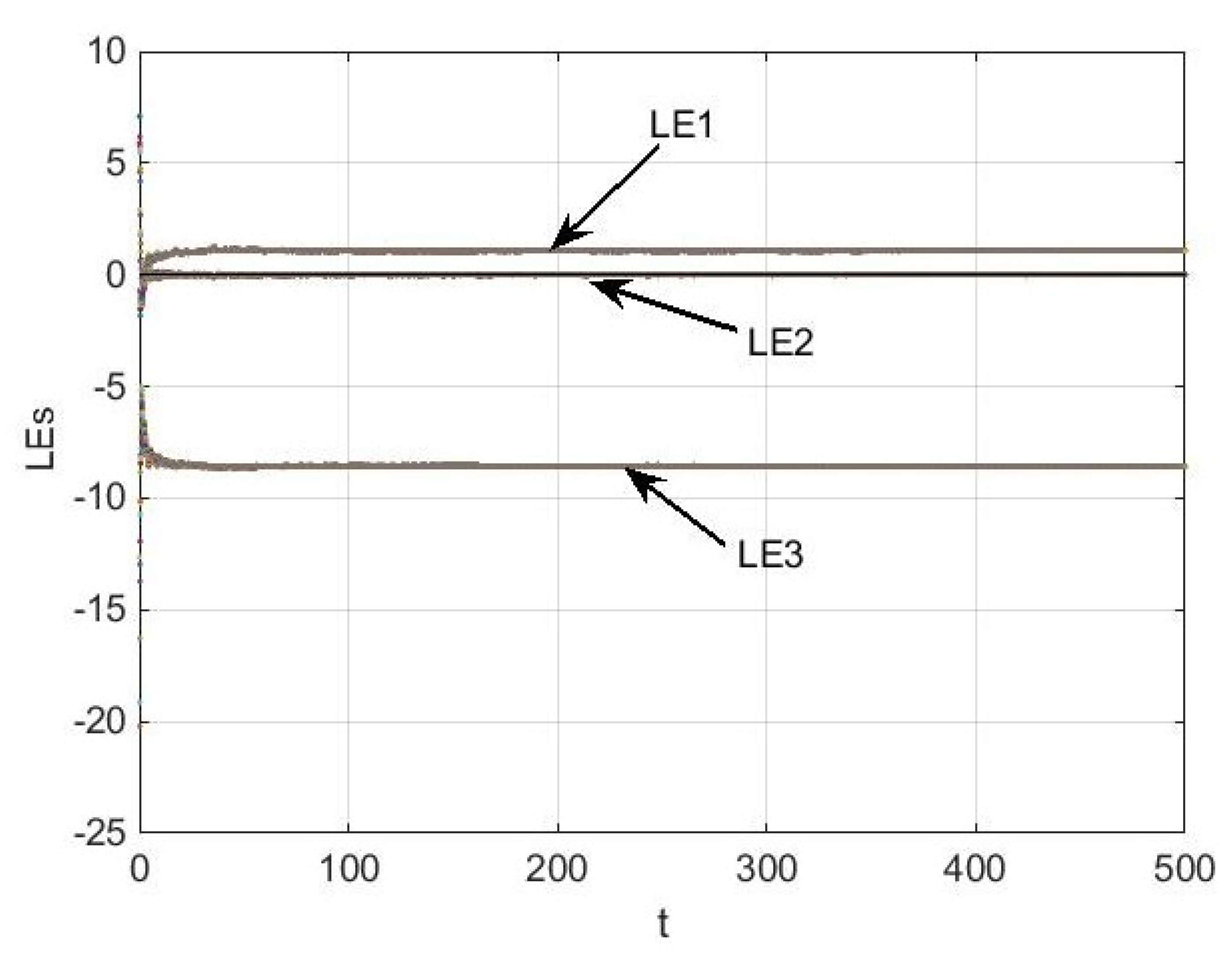
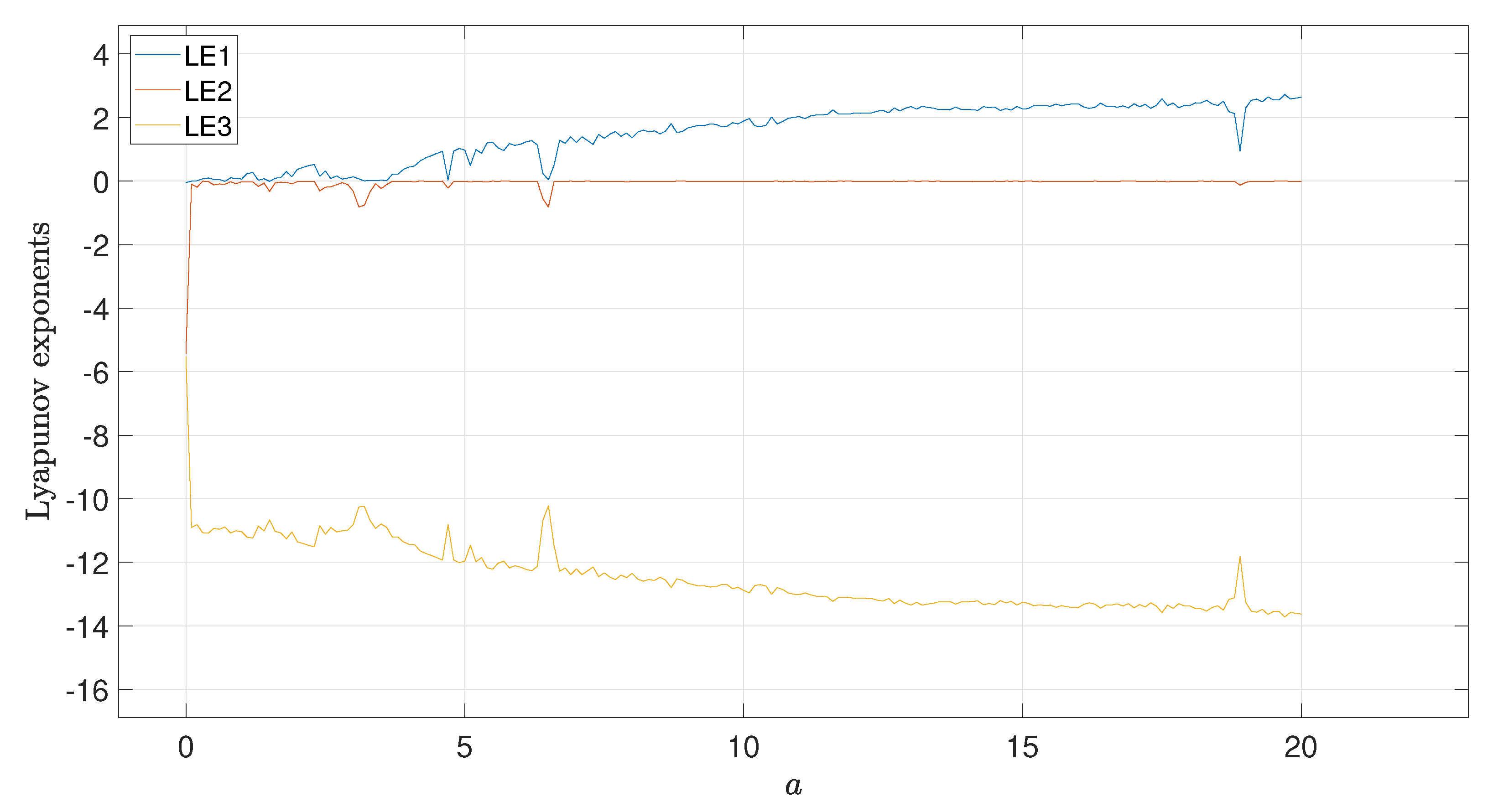
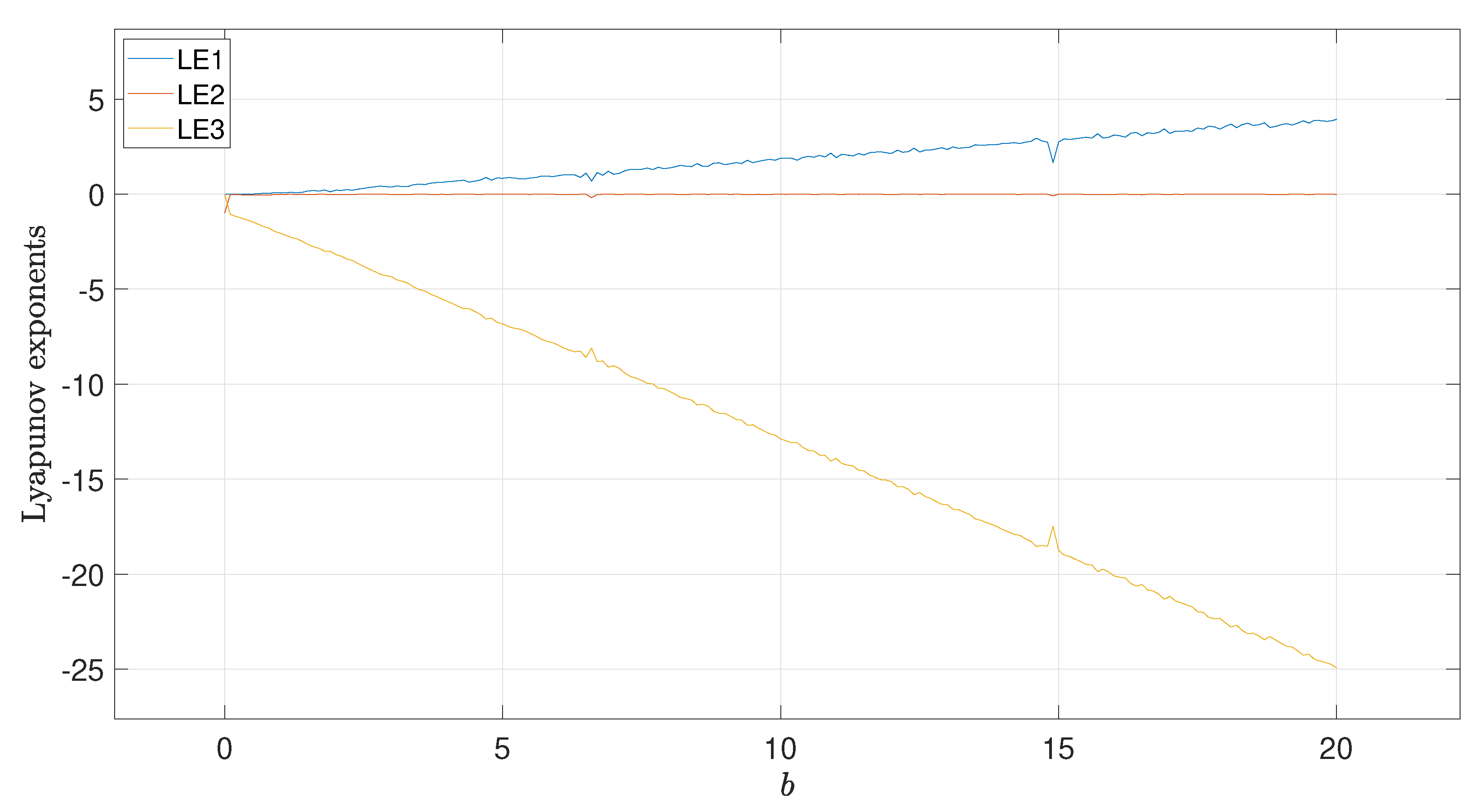
2.4. Lyapunov Exponents and Kaplan–York Dimension
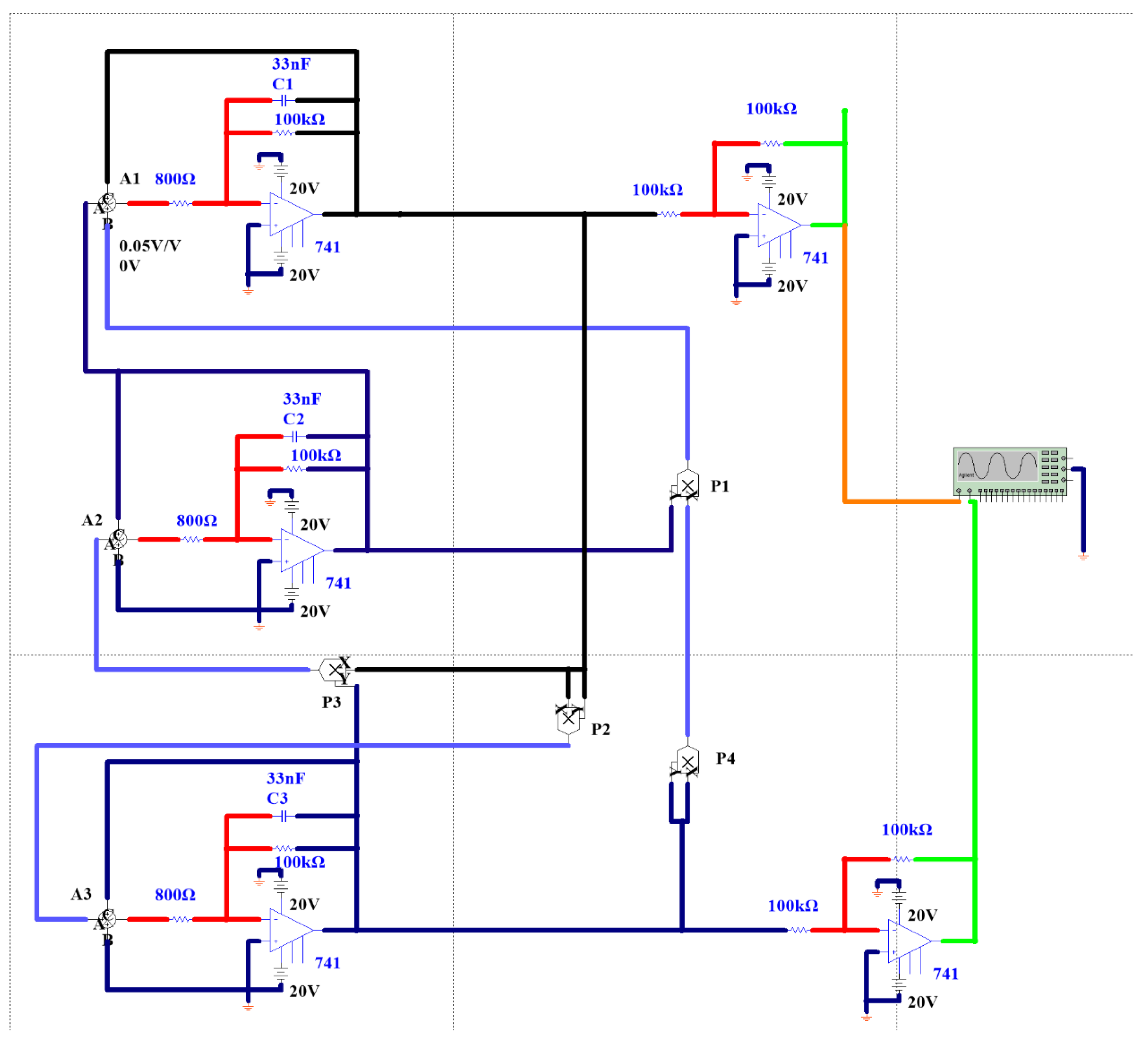
3. Electronic Circuit and Signal Flow Graph
3.1. Electronic Circuit Implementation for System Realization
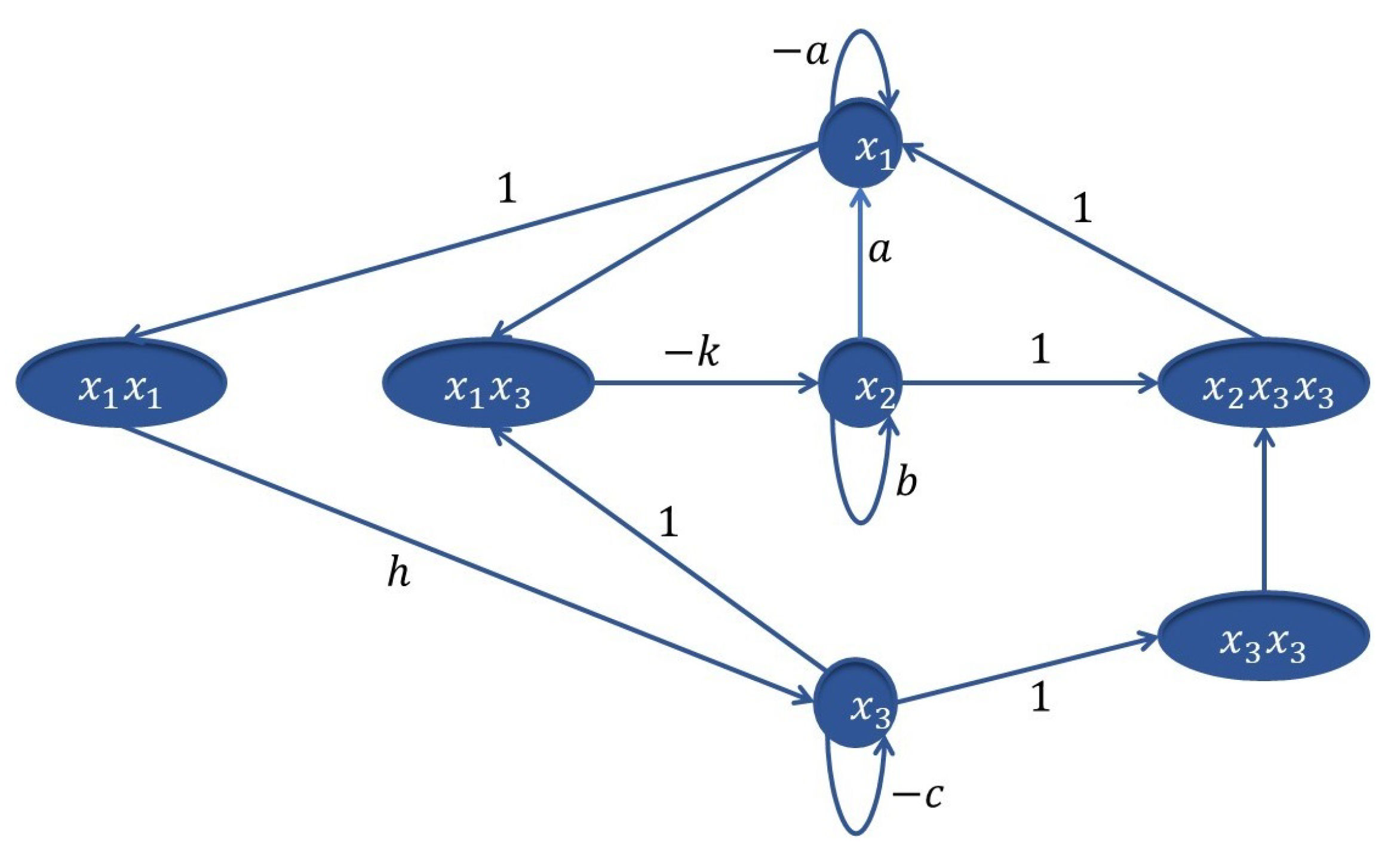
3.2. System’s Signal Flow Graph
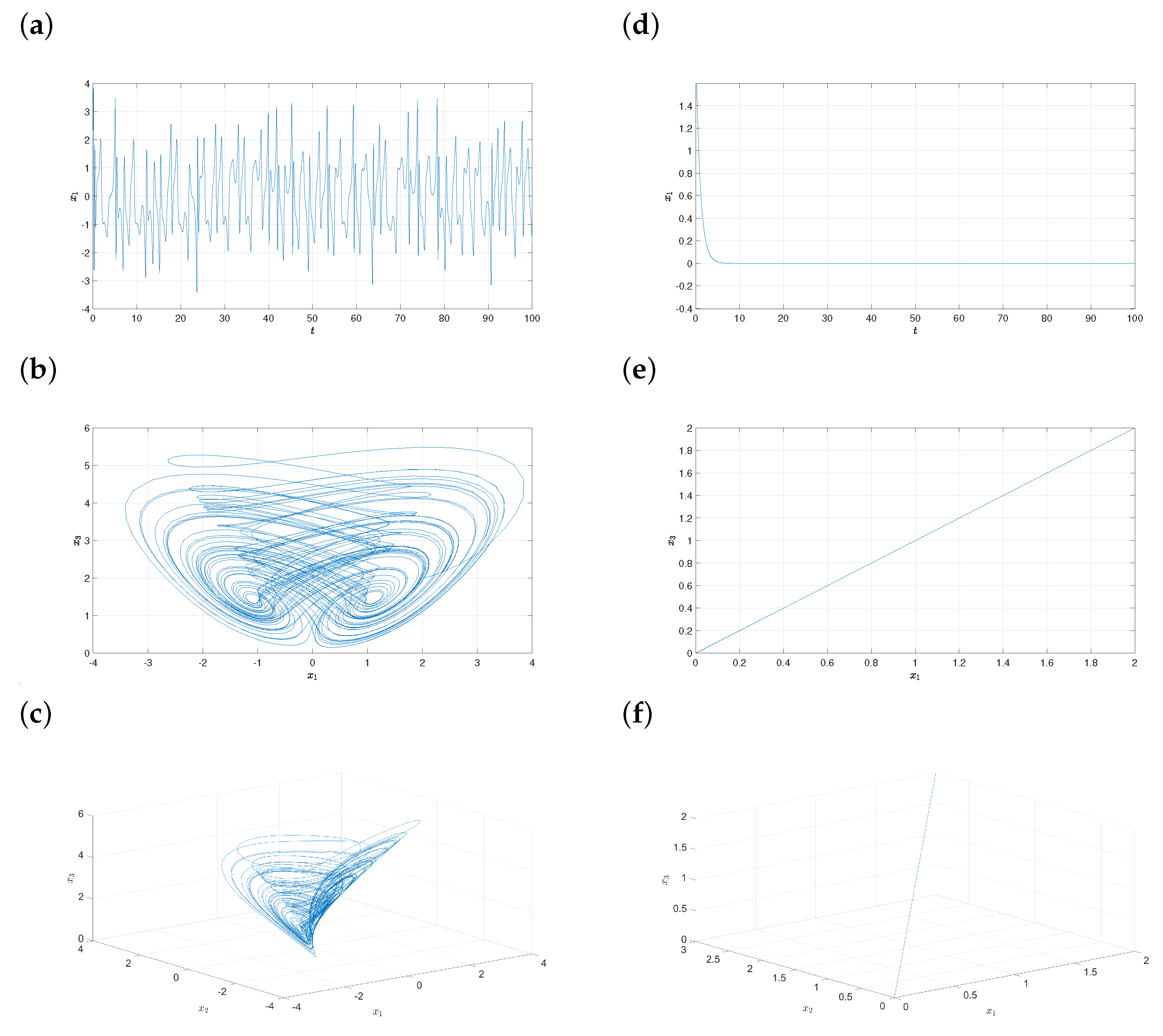
4. Chaotic Behavior of System-Control
4.1. Analytical Solution
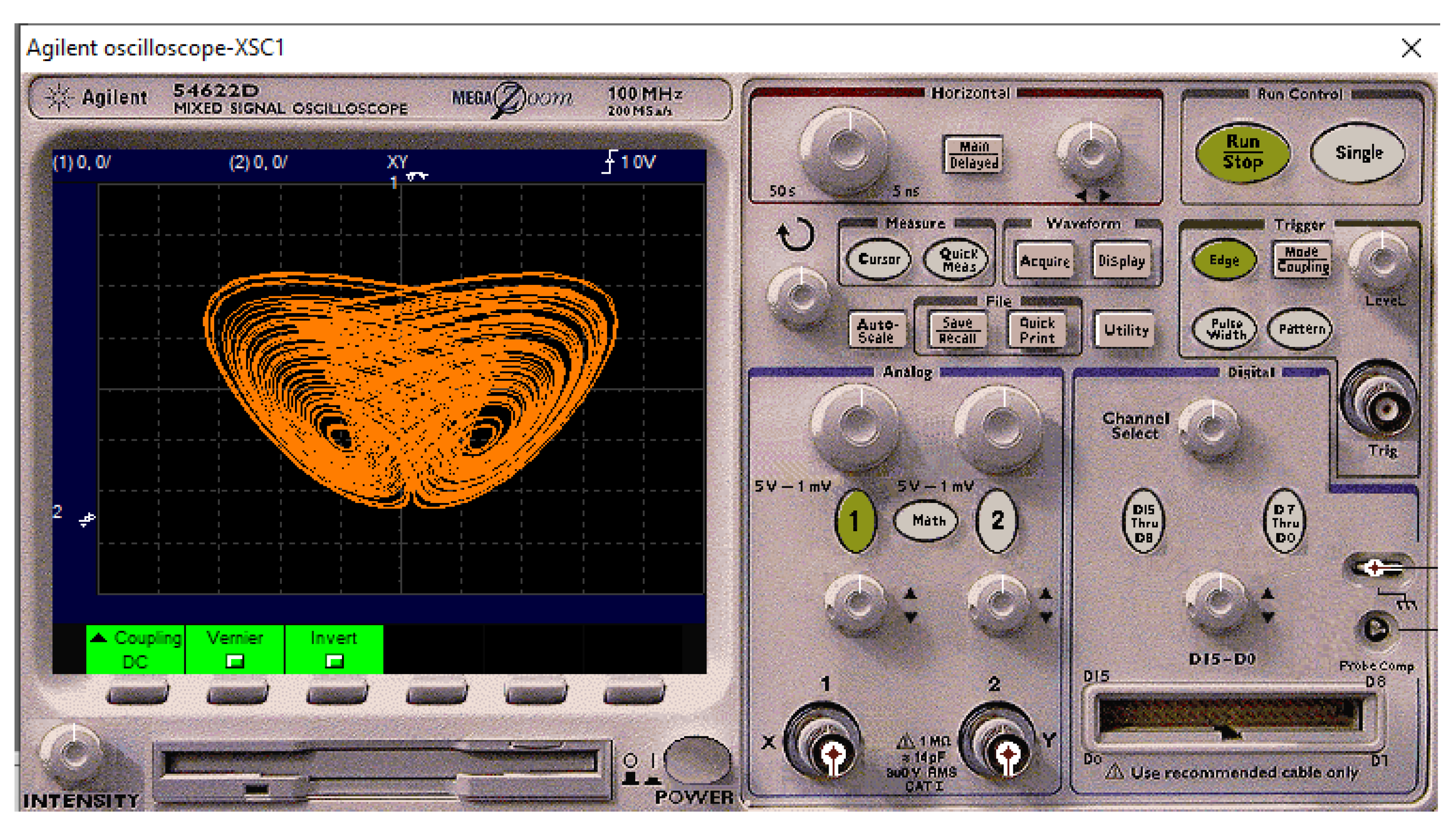
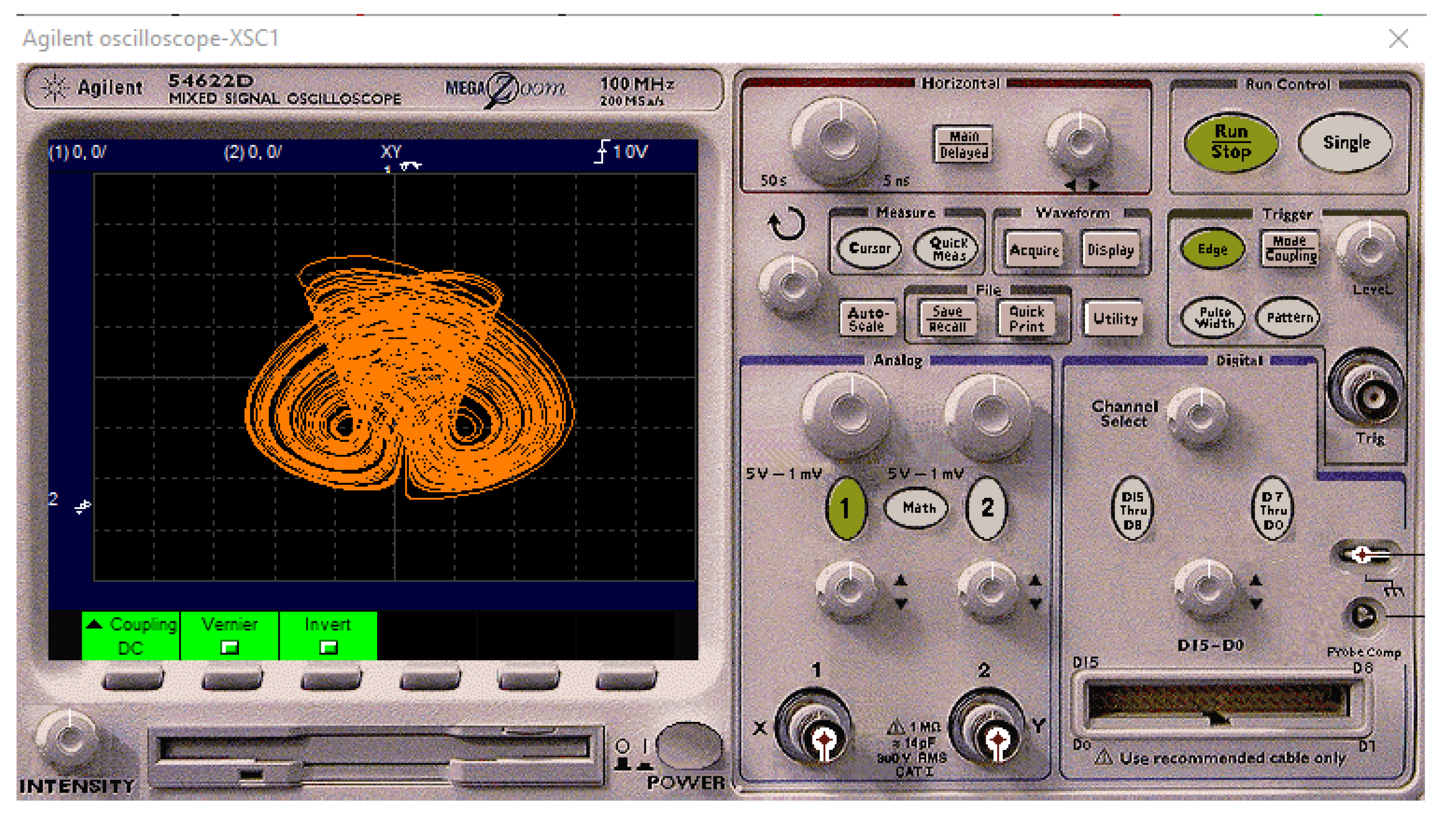
4.2. Numerical Simulation
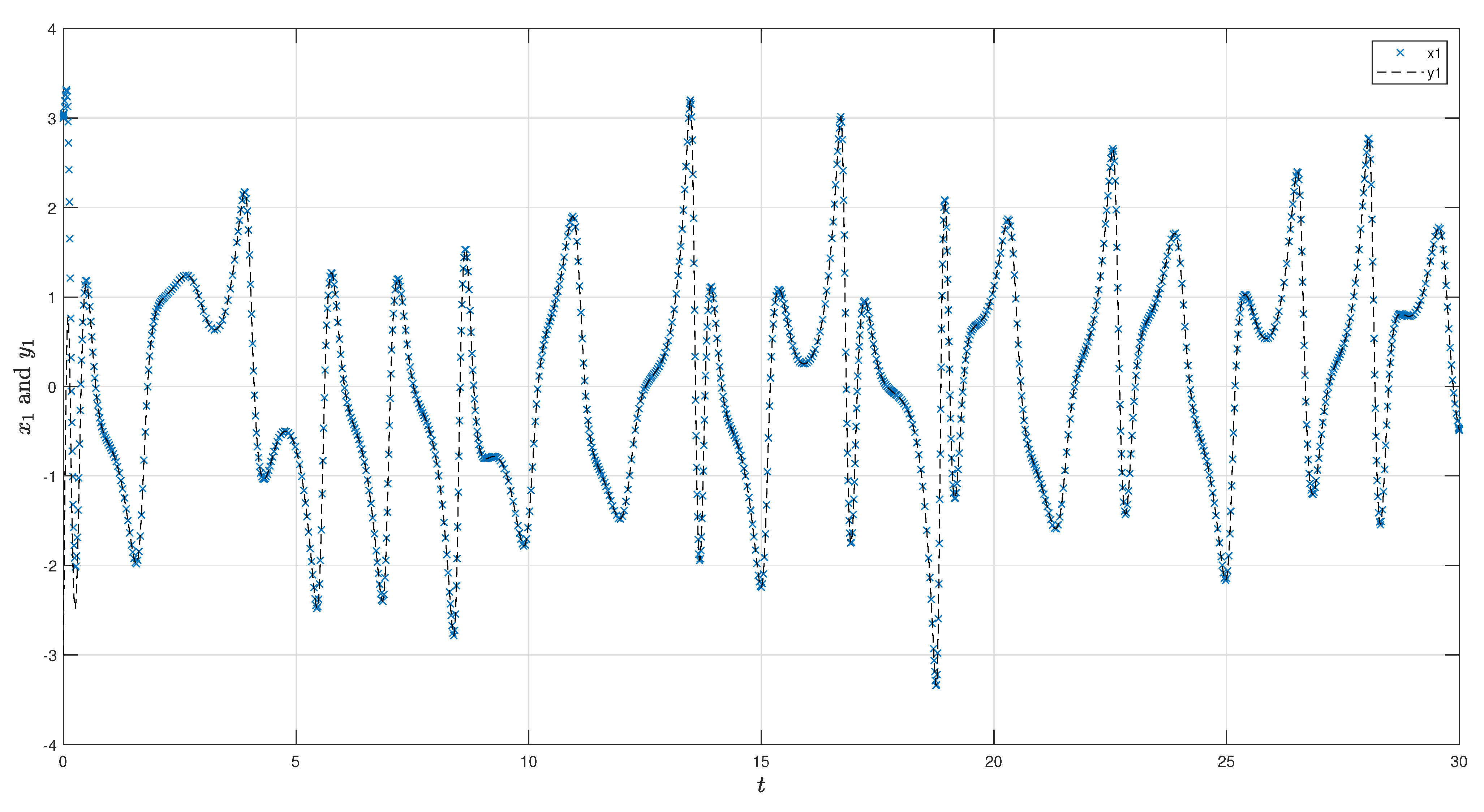
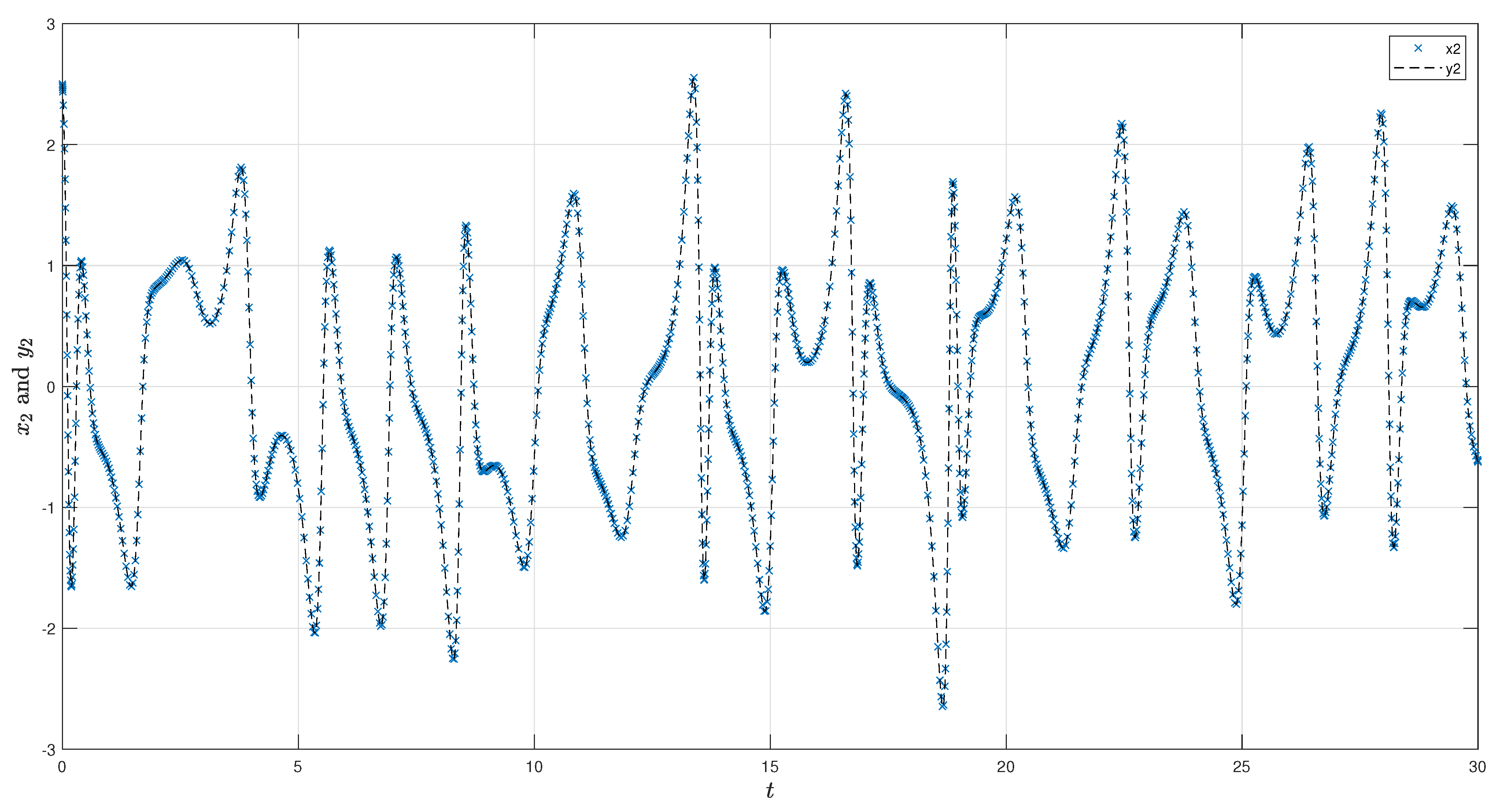
5. Complete Synchronization of Identical Chaotic System
5.1. Analytical Solution
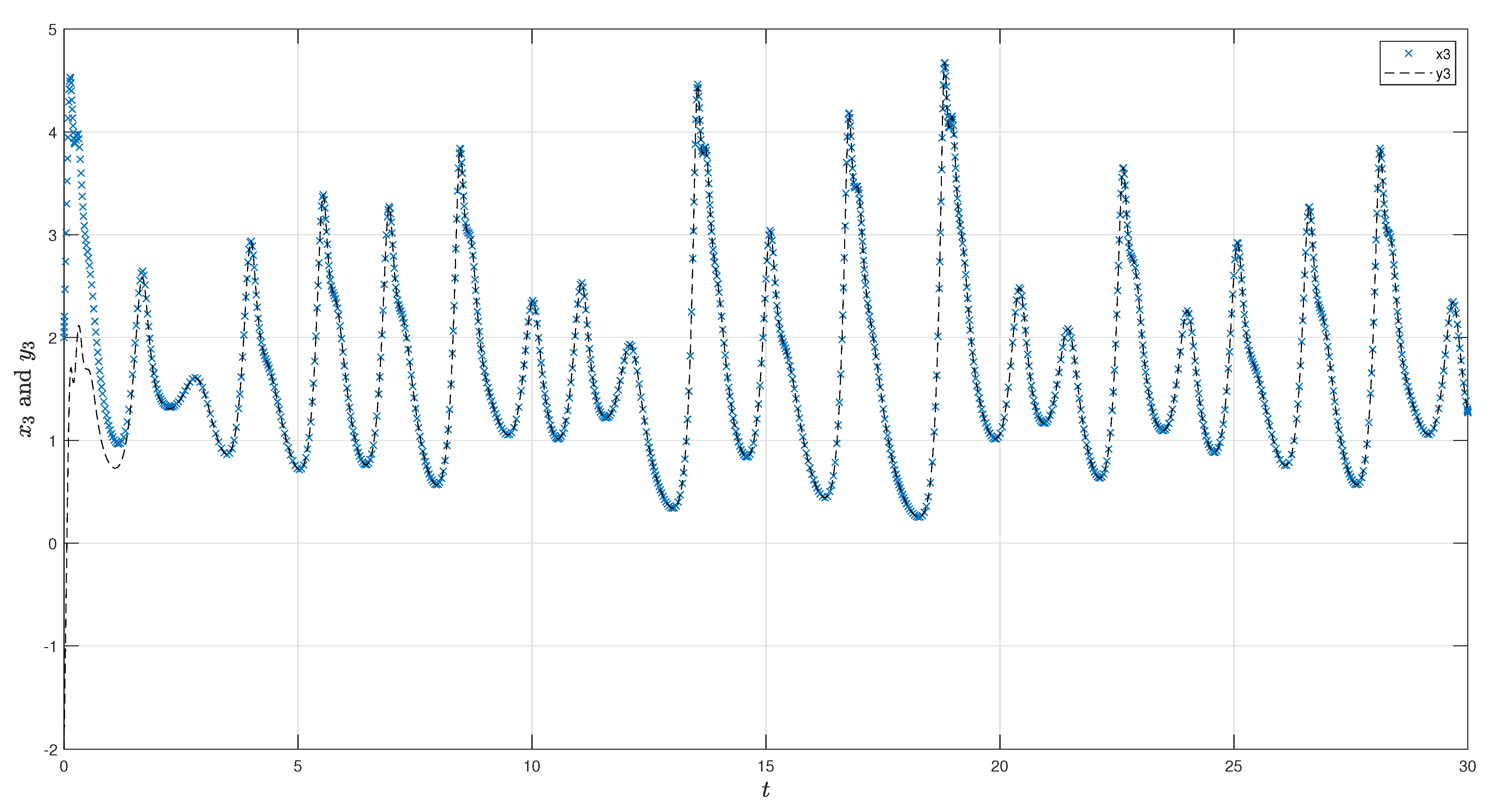
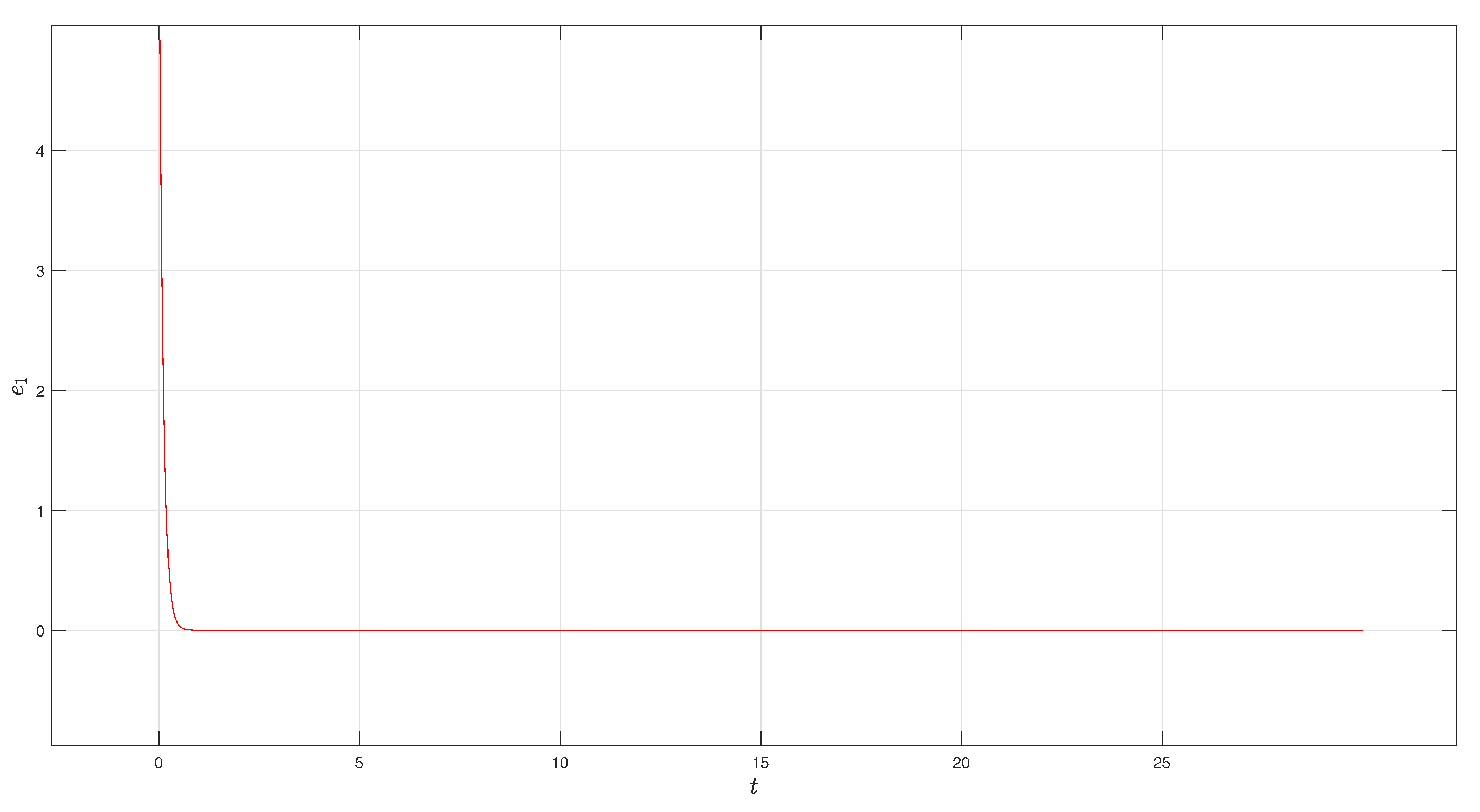
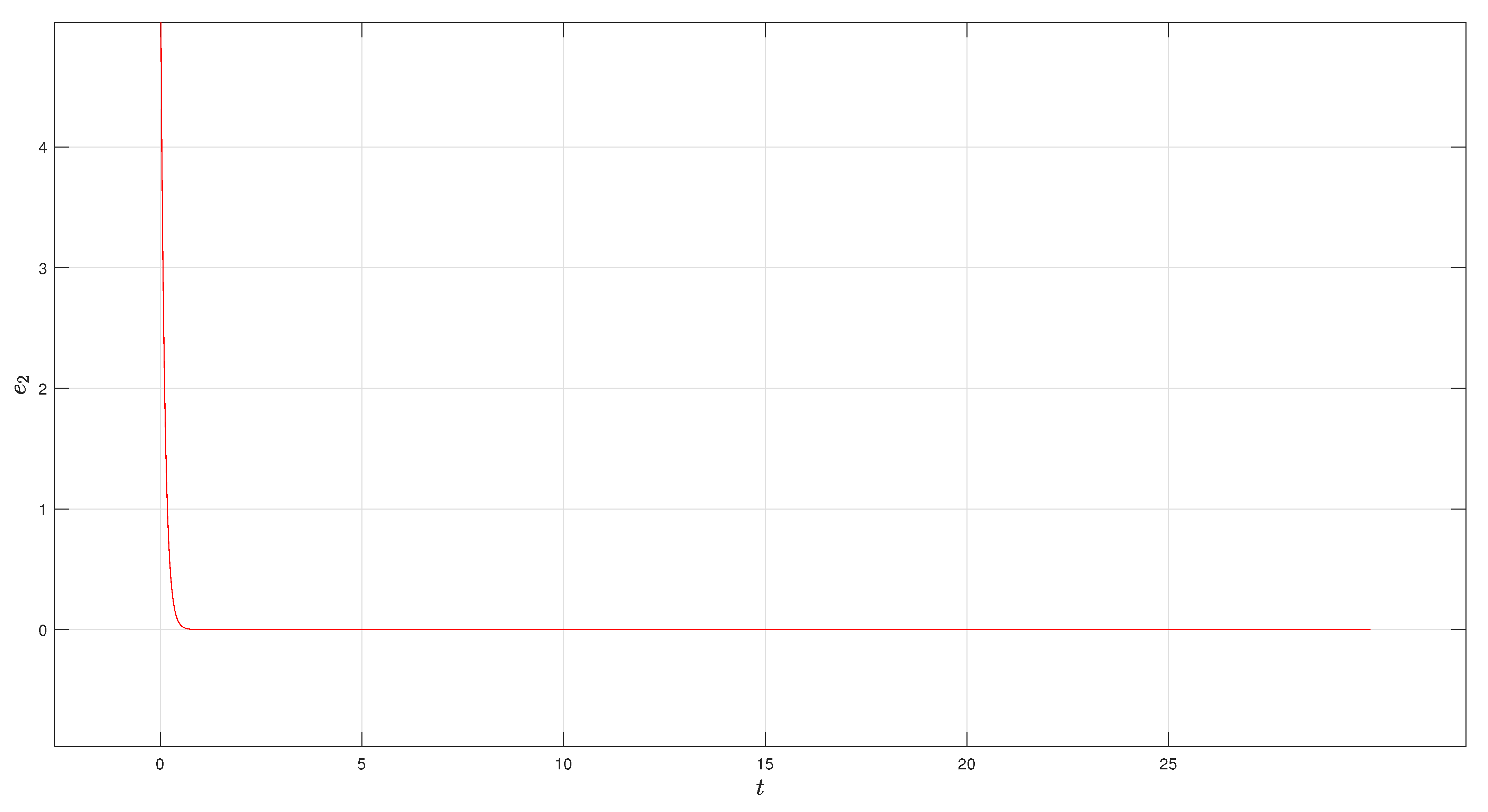
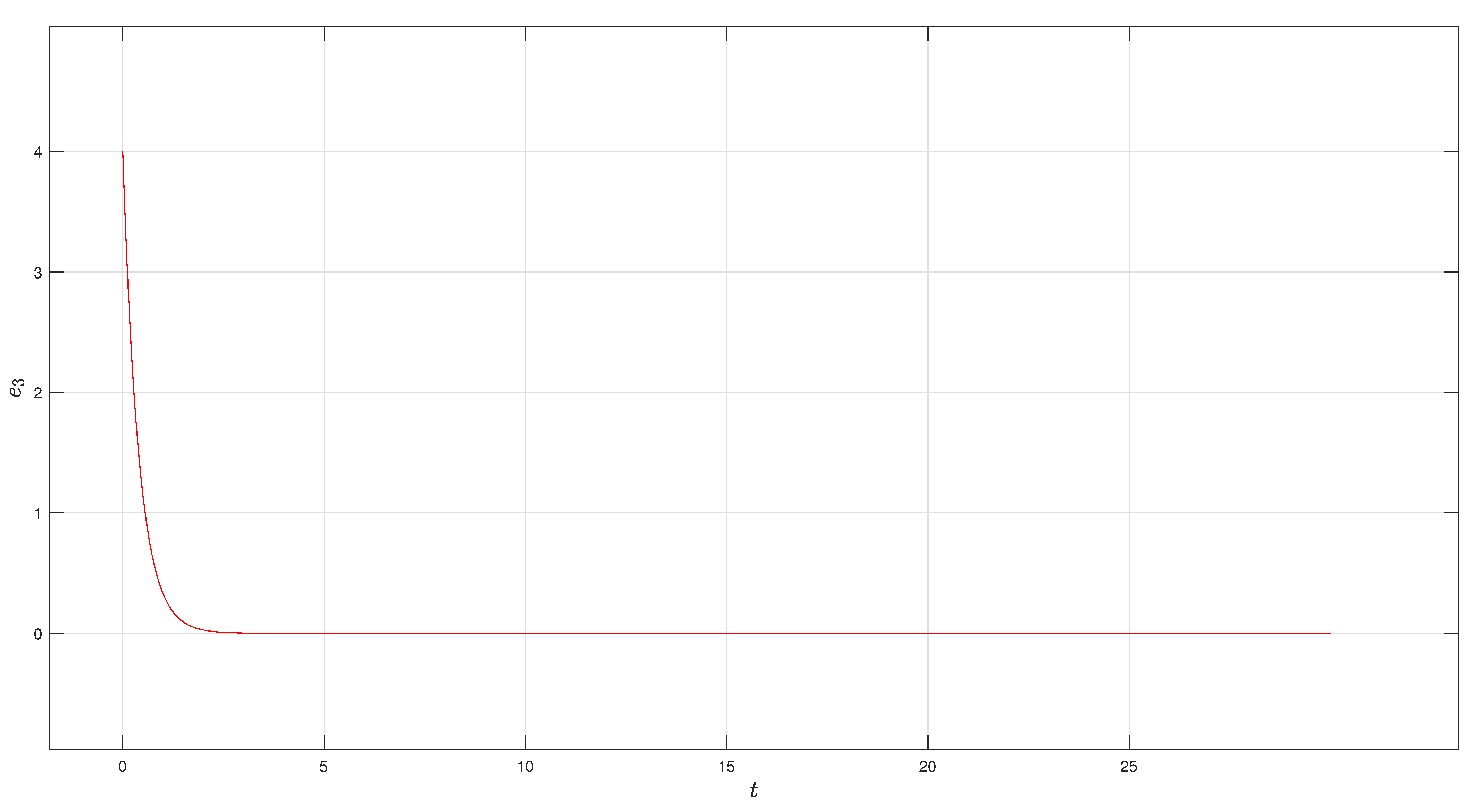
5.2. Numerical Simulation
5.3. An Application in Secure Communications
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qi, G.; Chen, G.; Du, S.; Chen, Z.; Yuan, Z. Analysis of a new chaotic system. Phys. A Stat. Mech. Appl. 2005, 352, 295–308. [Google Scholar] [CrossRef]
- Qi, G.; Chen, Z.; Yuan, Z. Model-free control of affine chaotic systems. Phys. Lett. A 2005, 344, 189–202. [Google Scholar] [CrossRef]
- Nana Nbendjo, B.R.; Woafo, P. Active control with delay of horseshoes chaos using piezoelectric absorber on a buckled beam under parametric excitation. Chaos Solitons Fractals 2007, 32, 73–79. [Google Scholar] [CrossRef]
- Park, J.H. Chaos synchronization between two different chaotic dynamical systems. Chaos Solitons Fractals 2006, 27, 549–554. [Google Scholar] [CrossRef]
- Wu, C.; Fang, T.; Rong, H. Chaos synchronization of two stochastic duffing oscillators by feedback control. Chaos Solitons Fractals 2007, 32, 1201–1207. [Google Scholar] [CrossRef]
- Moon, F.C. Chaotic and Fractal Dynamics; Wiley: New York, NY, USA, 1992. [Google Scholar]
- Khalil, H.K. Nonlinear System; Macmillan Publishing Company: New York, NY, USA, 1992. [Google Scholar]
- Mahmoud, E.E.; Mahmoud, G.M. Some Chaotic Complex Nonlinear Systems; Lambert Academic Publishing: Saarbrücken, Germany, 2010. [Google Scholar]
- Mahmoud, E.E.; Mahmoud, G.M. Chaotic and Hyperchaotic Nonlinear Systems; Lambert Academic Publishing: Saarbrücken, Germany, 2011. [Google Scholar]
- Eppinger, D.S.; Browning, R.T. Design Structure Matrix Methods and Applications; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Mezit, I.; Vladimir, A.; Fonoberov, M.F.; Sahai, T. Spectral complexity of directed graphs and application to structural decomposition. Complexity 2019, 2019, 18. [Google Scholar]
- Ma, C.; Mou, J.; Xiong, L.; Banerjee, S.; Liu, T.; Han, X. Dynamical analysis of a new chaotic system: Asymmetric multistability, offset boosting control and circuit realization. Nonlinear Dyn. 2021, 103, 2867–2880. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Pehlivan, İ.; Dolvis, L.G.; Jacques, K.; Alcin, M.; Tuna, M.; Koyuncu, I. A novel ANN-based four-dimensional two-disk hyperchaotic dynamical system, bifurcation analysis, circuit realisation and FPGA-based TRNG implementation. Int. J. Comput. Appl. Technol. 2020, 62, 20–35. [Google Scholar] [CrossRef]
- Takhi, H.; Kemih, K.; Moysis, L.; Volos, C. Passivity based sliding mode control and synchronization of a perturbed uncertain unified chaotic system. Math. Comput. Simul. 2021, 181, 150–169. [Google Scholar] [CrossRef]
- Darbasi, S.; Mirzaei, M.J.; Abazari, A.M.; Rezazadeh, G. Adaptive under-actuated control for capacitive micro-machined ultrasonic transducer based on an accurate nonlinear modeling. Nonlinear Dyn. 2022, 108, 2309–2322. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, P.; Chen, M.; Wang, Y. Dynamic analysis and robust control of a chaotic system with hidden attractor. Complexity 2021, 2021, 1–11. [Google Scholar] [CrossRef]
- Tong, Y.; Cao, Z.; Yang, H.; Li, C.; Yu, W. Design of a five-dimensional fractional-order chaotic system and its sliding mode control. Indian J. Phys. 2022, 96, 855–867. [Google Scholar] [CrossRef]
- Tiwari, A.; Nathasarma, R.; Roy, B.K. A 3D chaotic system with dissipative and conservative behaviors and its control using two linear active controllers. In Proceedings of the 2022 4th International Conference on Energy, Power and Environment (ICEPE), Shillong, India, 29 April–1 May 2022; Volume 29, pp. 1–6. [Google Scholar]
- Rybin, V.; Tutueva, A.; Karimov, T.; Kolev, G.; Butusov, D.; Rodionova, E. Optimizing the Synchronization Parameters in Adaptive Models of Rössler system. In Proceedings of the 2021 10th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 7–10 June 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Rybin, V.; Kolev, G.; Kopets, E.; Dautov, A.; Karimov, A.; Karimov, T. Optimal Synchronization Parameters for Variable Symmetry Discrete Models of Chaotic Systems. In Proceedings of the 2022 11th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 7–10 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Dana, S.K.; Roy, P.K.; Kurths, J. (Eds.) Complex Dynamics in Physiological Systems: From Heart to Brain; Springer Science & Business Media: New York, NY, USA, 2008. [Google Scholar]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef] [PubMed]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. Phase synchronization of chaotic oscillators. Phys. Rev. Lett. 1996, 76, 1804. [Google Scholar] [CrossRef] [Green Version]
- Rulkov, N.F.; Sushchik, M.M.; Tsimring, L.S.; Abarbanel, H.D. Generalized synchronization of chaos in directionally coupled chaotic systems. Phys. Rev. E 1995, 51, 980. [Google Scholar] [CrossRef]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. From phase to lag synchronization in coupled chaotic oscillators. Phys. Rev. Lett. 1997, 78, 4193. [Google Scholar] [CrossRef]
- Boccaletti, S.; Valladares, D.L. Characterization of intermittent lag synchronization. Phys. Rev. E 2000, 62, 7497. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hramov, A.E.; Koronovskii, A.A. An approach to chaotic synchronization. Chaos Interdiscip. J. Nonlinear Sci. 2004, 14, 603–610. [Google Scholar] [CrossRef] [Green Version]
- Hramov, A.E.; Koronovskii, A.A.; Moskalenko, O.I. Generalized synchronization onset. EPL (Europhys. Lett.) 2005, 72, 901. [Google Scholar] [CrossRef] [Green Version]
- Mainieri, R.; Rehacek, J. Projective synchronization in three-dimensional chaotic systems. Phys. Rev. Lett. 1999, 82, 3042. [Google Scholar] [CrossRef]
- Li, G.H. Generalized projective synchronization between Lorenz system and Chen’s system. Chaos Solitons Fractals 2007, 32, 1454–1458. [Google Scholar] [CrossRef]
- Du, H.; Zeng, Q.; Wang, C. Function projective synchronization of different chaotic systems with uncertain parameters. Phys. Lett. A 2008, 372, 5402–5410. [Google Scholar] [CrossRef]
- Sudheer, K.S.; Sabir, M. Adaptive function projective synchronization of two-cell Quantum-CNN chaotic oscillators with uncertain parameters. Phys. Lett. A 2009, 373, 1847–1851. [Google Scholar] [CrossRef]
- Sudheer, K.S.; Sabir, M. Function projective synchronization in chaotic and hyperchaotic systems through open-plus-closed-loop coupling. Chaos Interdiscip. J. Nonlinear Sci. 2010, 20, 013115. [Google Scholar] [CrossRef] [PubMed]
- Tutueva, A.; Moysis, L.; Rybin, V.; Zubarev, A.; Volos, C.; Butusov, D. Adaptive symmetry control in secure communication systems. Chaos Solitons Fractals 2022, 159, 112181. [Google Scholar] [CrossRef]
- Rybin, V.; Butusov, D.; Rodionova, E.; Karimov, T.; Ostrovskii, V.; Tutueva, A. Discovering Chaos-Based Communications by Recurrence Quantification and Quantified Return Map Analyses. Int. J. Bifurc. Chaos 2022, 32, 2250136. [Google Scholar] [CrossRef]
- Rybin, V.; Karimov, T.; Bayazitov, O.; Kvitko, D.; Babkin, I.; Shirnin, K.; Kolev, G.; Butusov, D. Prototyping the Symmetry-Based Chaotic Communication System Using Microcontroller Unit. Appl. Sci. 2023, 13, 936. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Summer Symbol | A | B | C | O |
|---|---|---|---|---|
| A1 | −10 | −1 | 10 | 0.05 |
| A2 | −3 | 3 | −5 | 0.05 |
| A3 | 3 | 0 | 2.5 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almuzaini, M.; Alzahrani, A. Control and Synchronization of a Novel Realizable Nonlinear Chaotic System. Fractal Fract. 2023, 7, 253. https://doi.org/10.3390/fractalfract7030253
Almuzaini M, Alzahrani A. Control and Synchronization of a Novel Realizable Nonlinear Chaotic System. Fractal and Fractional. 2023; 7(3):253. https://doi.org/10.3390/fractalfract7030253
Chicago/Turabian StyleAlmuzaini, Mohammed, and Abdullah Alzahrani. 2023. "Control and Synchronization of a Novel Realizable Nonlinear Chaotic System" Fractal and Fractional 7, no. 3: 253. https://doi.org/10.3390/fractalfract7030253