


Robust Trajectory Tracking Control for Serial Robotic Manipulators Using Fractional Order-Based PTID Controller


Abstract
:1. Introduction
- To the best knowledge of the author, a FOPTID controller based on the combination of TID and FOPID controllers is firstly designed with a GWO–PSO algorithm to provide the trajectory tracking of a 3-DOF serial robotic manipulator under friction, external disturbance and different trajectories. This hybrid controller has major advantages in improving trajectory tracking control performance and enhancing robustness.
- In order to demonstrate the effectiveness of the proposed controller, PID, FOPID and PTID controllers are designed with the same optimization algorithm for carrying out trajectory-tracking tasks under the same conditions.
- By eliminating the effects of internal and external disturbances as total disturbance, the proposed FOPTID controller is more capable of dealing with the total disturbance during the reference trajectory tracking than existing controllers. Accordingly, better tracking accuracy is provided by the FOPTID controller.
2. Dynamic Model of the Manipulator
3. Design of Controllers
3.1. Fractional Calculus
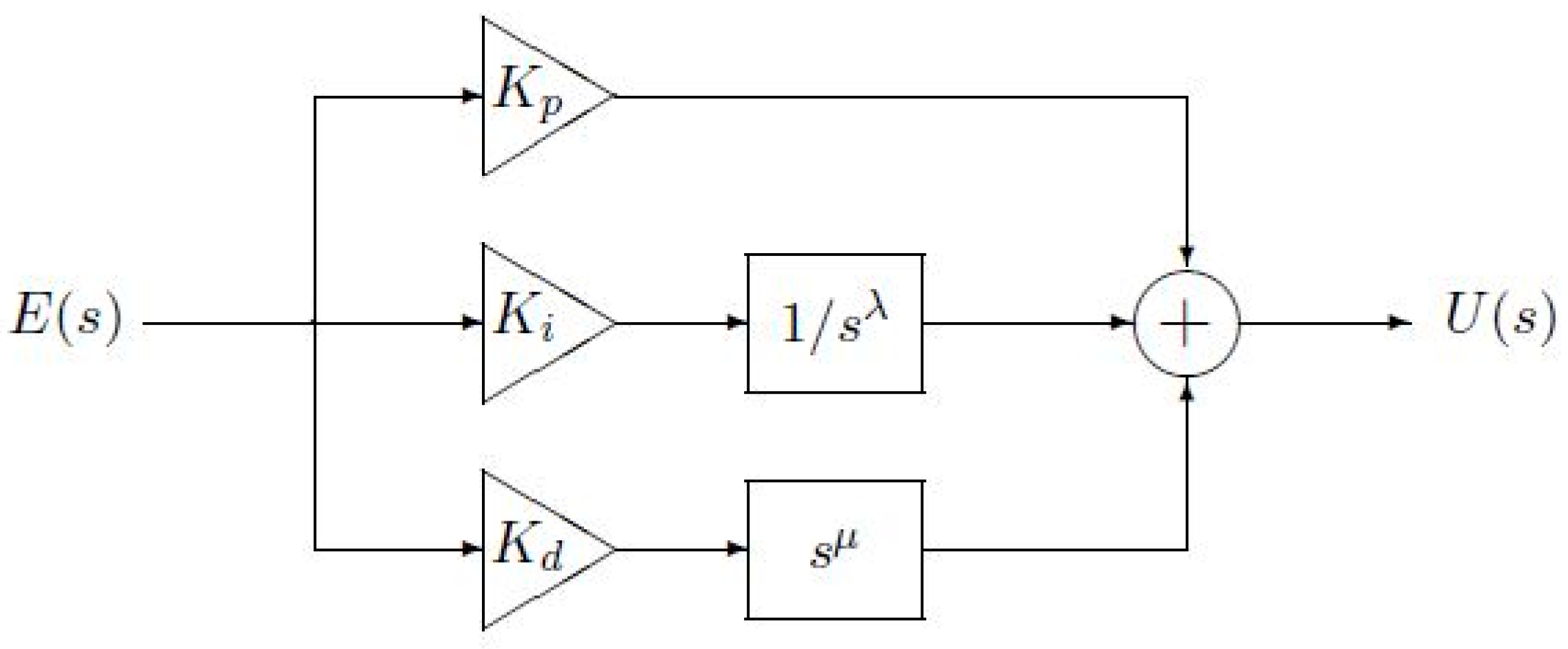
3.2. Fractional Order Controllers
4. Optimization Tasks
4.1. Optimization Algorithm
4.1.1. Particle Swarm Optimization (PSO) Algorithm
4.1.2. Gray Wolf Optimization (GWO) Algorithm
4.1.3. GWO–PSO Algorithm
4.2. Objective Function
4.3. Proposed Control System Framework
5. Simulation Results and Discussions
5.1. Trajectory Tracking Analysis
5.2. Robustness Testing: Different Trajectory
5.3. Robustness Testing: Disturbance Rejection
5.4. Robustness Testing: Friction Compensation
6. Conclusions
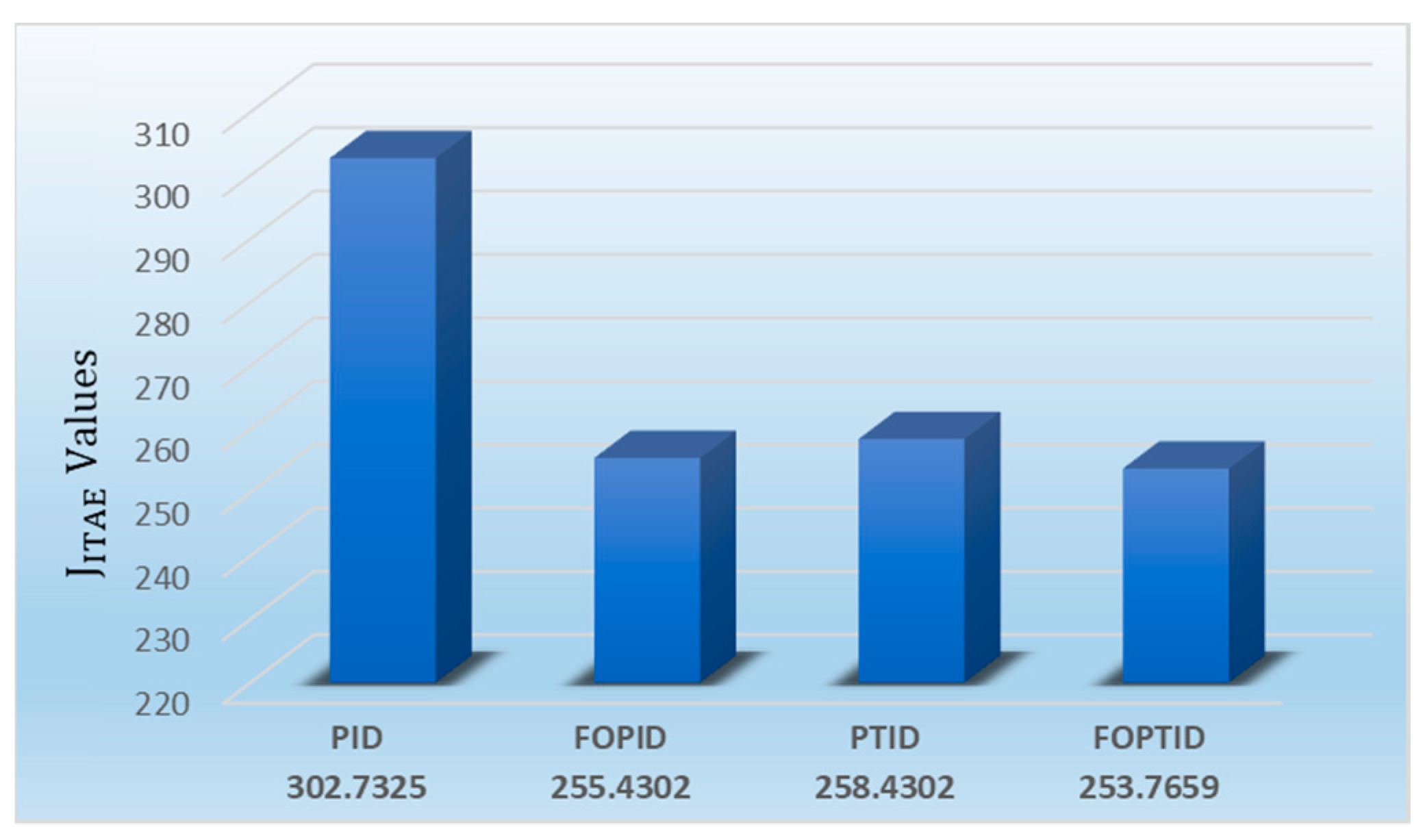
- TID-based controllers, as well as PID-based controllers, have been tuned by GWO–PSO with minimization of the objective function for the trajectory tracking control of the robot joints. Compared to the results from the tuned controllers, the proposed FOPTID control strategy achieved better performance than the other tuned controllers at the robot joints.
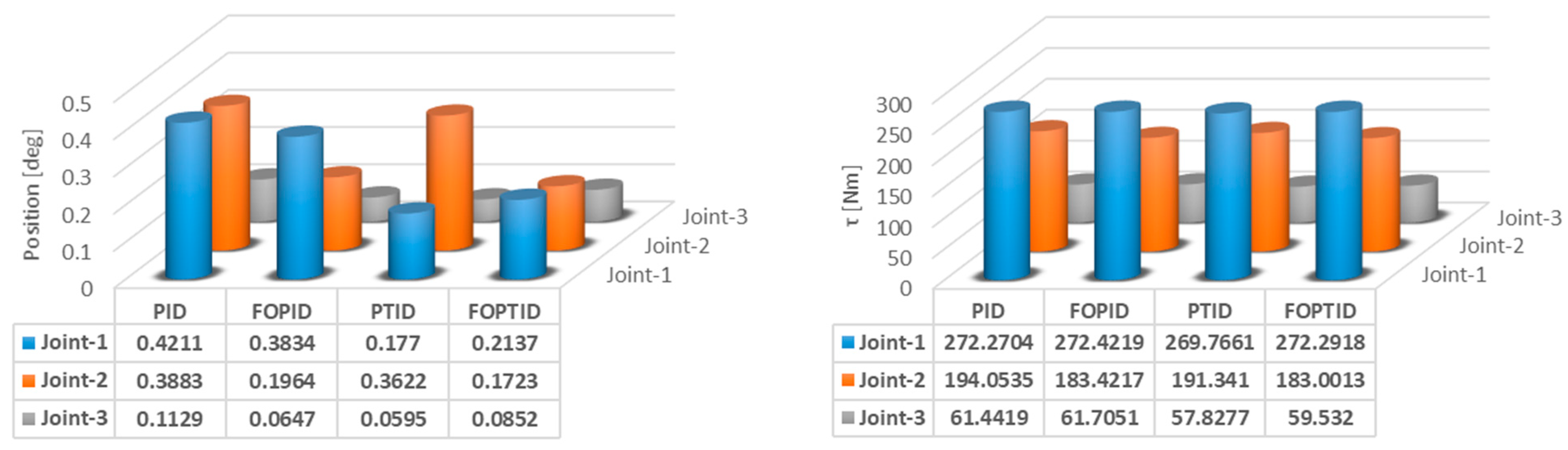
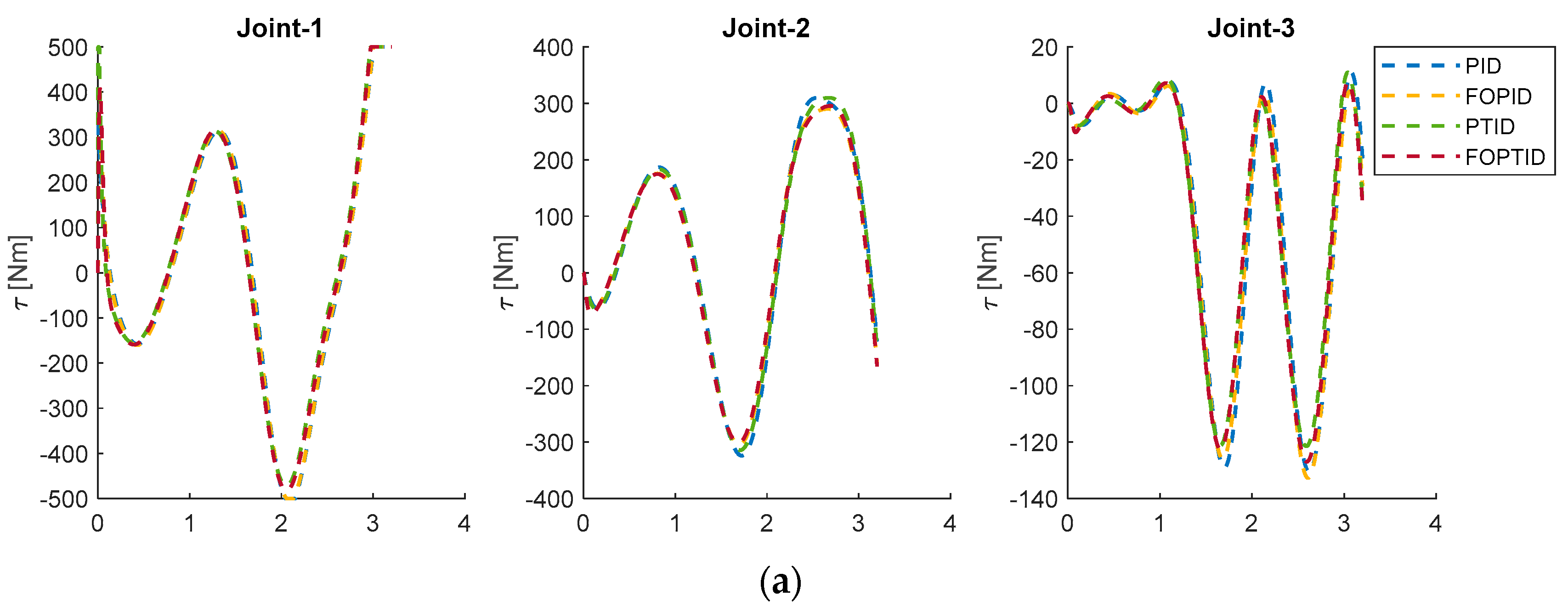
- For the purpose of observing the stability of the designed controllers, a different trajectory was applied to the robot joints. The simulation results showed that PTID and FOPTID control schemes can track the change in the joint angle more accurately and maintain stability as compared to PID and FOPID control schemes. As well, TID-based controllers required lesser applied torque for tracking the desired joint trajectories than the PID based controllers.
- As examined controller robustness in the presence of external disturbance applied to each joint, the proposed FOPTID controller was more capable of dealing with the disturbance in all joints during the reference trajectory tracking as compared to the PID, FOPID and PTID controllers. Accordingly, the effectiveness of the proposed controller was verified for disturbance rejection.
- As compared to the designed controllers in terms of reducing the effect of joint friction, a remarkable performance was achieved by both PTID and FOPTID for a set point tracking task. From the simulation results, it could be inferred that the TID-based control schemes have significantly reduced the means of absolute joint errors.
Funding
Data Availability Statement
Conflicts of Interest
References
- Mirza, M.A.; Li, S.; Jin, L. Simultaneous learning and control of parallel Stewart platforms with unknown parameters. Neurocomputing 2017, 266, 114–122. [Google Scholar] [CrossRef]
- Oustaloup, A. From fractality to non-integer derivation through recursivity, a property common to these two concepts: A fundamental idea from a new process control strategy. In Proceedings of the 12th IMACS World Congress, Paris, France, 18–22 July 1998. [Google Scholar]
- Oustaloup, A.; Moreau, X.; Nouillant, M. The CRONE suspension. Control Eng. Pract. 1996, 4, 1101–1108. [Google Scholar] [CrossRef]
- Oustaloup, A.; Sabatier, J.; Lanusse, P. From fractal robustness to CRONE control. Fract. Calc. Appl. Anal. 1999, 2, 1–30. [Google Scholar]
- Podlubny, I. Fractional-Order Systems and Fractional-Order Controllers; Tech. Rep. UEF-03-94; Slovak Academy of Sciences Institute of Experimental Physics, Department of Control Engineering, University of Technology: Kosice, Slovakia, 1994. [Google Scholar]
- Bingul, Z.; Karahan, O. Fractional PID controllers tuned by evolutionary algorithms for robot trajectory control. Turk. J. Electr. Eng. Comput. Sci. 2012, 20, 1123–1136. [Google Scholar]
- Angel, L.; Viola, J. Fractional order PID for tracking control of a parallel robotic manipulator type delta. ISA Trans. 2018, 79, 172–188. [Google Scholar] [CrossRef]
- Al-Mayyahi, A.; Aldair, A.A.; Chatwin, C. Control of a 3-RRR Planar Parallel Robot Using Fractional Order PID Controller. Int. J. Autom. Comput. 2020, 17, 822–836. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Che, L.; Wang, N.; Bai, Y.; Wang, C. Workspace analysis and motion control strategy of robotic mine anchor drilling truck manipulator based on the WOA-FOPID algorithm. Front. Earth Sci. 2022, 10, 1253. [Google Scholar]
- Sharma, R.; Gaur, P.; Mittal, A.P. Performance analysis of two-degree of freedom fractional order PID controllers for robotic manipulator with payload. ISA Trans. 2015, 58, 279–291. [Google Scholar] [CrossRef]
- Dumlu, A.; Erenturk, K. Trajectory Tracking Control for a 3-DOF Parallel Manipulator Using Fractional-Order PIλDμ Control. IEEE Trans. Ind. Electron. 2014, 61, 3417–3426. [Google Scholar] [CrossRef]
- Lurie, B.J. Three-Parameter Tilt-Integral-Derivative (TID). U.S. Patent 5,371,670, 6 December 1994. [Google Scholar]
- Sain, D.; Swain, S.K.; Mishra, S.K. TID and I-TD controller design for magnetic levitation system using genetic algorithm. Perspect. Sci. 2016, 8, 370–373. [Google Scholar] [CrossRef] [Green Version]
- Sahu, R.B.; Panda, S.; Biswal, A.; Sekhar, G.T.C. Design and analysis of tilt integral derivative controller with filter for load frequency control of multi-area interconnected power systems. ISA Trans. 2016, 61, 251–264. [Google Scholar] [CrossRef] [PubMed]
- Gnaneshwar, K.; Padhy, P.K. Robust Design of Tilted Integral Derivative Controller for Non-integer Order Processes with Time Delay. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Bhuyan, M.; Das, D.C.; Barik, A.K.; Sahoo, S.C. Performance Assessment of Novel Solar Thermal-Based Dual Hybrid Microgrid System Using CBOA Optimized Cascaded PI-TID Controller. IETE J. Res. 2022. [Google Scholar] [CrossRef]
- Xue, D.; Chen, Y. A comparative introduction of four fractional order controllers. In Proceedings of the 4th World Congress on Intelligent Control and Automation, Shanghai, China, 10–14 June 2002; Volume 4, pp. 3228–3235. [Google Scholar]
- Morsali, J.; Zare, K.; Hagh, M.T. Comparative performance evaluation of fractional order controllers in LFC of two-area diverse-unit power system with considering GDB and GRC effects. J. Electr. Syst. Inf. Technol. 2018, 5, 708–722. [Google Scholar] [CrossRef]
- Topno, P.N.; Chanana, S. Differential evolution algorithm-based tilt integral derivative control for LFC problem of an interconnected hydro-thermal power system. J. Vib. Control 2018, 24, 3952–3973. [Google Scholar] [CrossRef]
- Sharma, M.; Prakash, S.; Saxena, S.; Dhundhara, S. Optimal fractional-order tilted-integral-derivative controller for frequency stabilization in hybrid power system using salp swarm algorithm. Electr. Power Compon. Syst. 2021, 48, 1912–1931. [Google Scholar] [CrossRef]
- Sharma, M.; Prakash, S.; Saxena, S. Robust Load Frequency Control Using Fractional-order TID-PD Approach via Salp Swarm Algorithm. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Lu, C.; Tang, R.; Chen, Y.Q.; Li, C. Robust tilt-integral-derivative controller synthesis for first-order plus time delay and higher-order systems. Int. J. Robust Nonlinear Control 2023, 33, 1566–1592. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.A. An Optimized Hybrid Fractional Order Controller for Frequency Regulation in Multi-Area Power Systems. IEEE Access 2020, 8, 213899–213915. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for Future Electric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Choudhary, R.; Rai, J.N.; Arya, Y. Cascade FOPI-FOPTID controller with energy storage devices for AGC performance advancement of electric power systems. Sustain. Energy Technol. Assess. 2022, 53 Pt C, 102671. [Google Scholar] [CrossRef]
- Yanmaz, K.; Mengi, O.O.; Sahin, E. Advanced STATCOM Control with the Optimized FOPTID-MPC Controller. IETE J. Res. 2022. [Google Scholar] [CrossRef]
- Bingül, Z.; Karahan, O. Dynamic identification of Staubli RX-60 robot using PSO and LS methods. Expert Syst. Appl. 2011, 38, 4136–4149. [Google Scholar] [CrossRef]
- Ortigueira, M.D. Fractional Calculus for Scientists and Engineers; Springer: Berlin, Germany, 2011. [Google Scholar]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst.-I Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Hegedus, E.T.; Birs, I.R.; Ghita, M.; Muresan, C.I. Fractional-Order Control Strategy for Anesthesia–Hemodynamic Stabilization in Patients Undergoing Surgical Procedures. Fractal Fract. 2022, 6, 614. [Google Scholar] [CrossRef]
- Behera, M.K.; Saikia, L.C. Anti-windup filtered second-order generalized integrator-based spontaneous control for single-phase grid-tied solar PV-H2/Br2 redox flow battery storage microgrid system. J. Energy Storage 2022, 55B, 105551. [Google Scholar] [CrossRef]
- Ramoji, S.K.; Saikia, L.C. Optimal Coordinated Frequency and Voltage Control of CCGT-Thermal Plants with TIDF Controller. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume IV, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Shaheen, M.A.M.; Hasanien, H.M.; Alkuhayli, A. A novel hybrid GWO-PSO optimization technique for optimal reactive power dispatch problem solution. Ain Shams Eng. J. 2021, 12, 621–630. [Google Scholar] [CrossRef]
- Valério, D.; Da Costa, J.S. NINTEGER: A non-integer control toolbox for MATLAB. In Proceedings of the Fractional Differentiation and Its Applications, Bordeaux, France, 19–20 July 2004. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Controller | MAE | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | PID | - | 203.8760 | 0.0127 | 132.5981 | - | - | - | 2.0832 |
| FOPID | - | 271.4936 | 0.0124 | 132.2961 | 1.0381 | 0.0756 | - | 1.9153 | |
| PTID | 236.3371 | 349.7559 | 0.0122 | 298.3974 | - | - | 299.9889 | 1.8705 | |
| FOPTID | 80.0347 | 349.7559 | 21.2705 | 273.0510 | 0.9257 | 0.3053 | 268.3995 | 1.9048 | |
| 2 | PID | - | 325.0161 | 0.0130 | 79.4103 | - | - | - | 3.0791 |
| FOPID | - | 333.5564 | 298.1256 | 148.4613 | 1.0962 | 0.0308 | - | 3.0235 | |
| PTID | 298.1256 | 20.5604 | 0.0131 | 93.6091 | - | - | 233.8233 | 3.0426 | |
| FOPTID | 90.5690 | 348.9735 | 221.4909 | 179.8575 | 1.0533 | 0.0104 | 220.1078 | 2.9837 | |
| 3 | PID | - | 251.7546 | 295.1566 | 25.5284 | - | - | - | 1.9342 |
| FOPID | - | 296.9951 | 80.5790 | 311.0399 | 0.5549 | 0.6426 | - | 1.1130 | |
| PTID | 340.8880 | 290.3104 | 0.0121 | 50.3965 | - | - | 132.3825 | 1.2832 | |
| FOPTID | 318.2374 | 29.3824 | 7.6325 | 145.1791 | 0.6516 | 1.0140 | 280.9249 | 1.1771 |
| Friction Parameters | Joint-1 | Joint-2 | Joint-3 | Unit |
|---|---|---|---|---|
| 0.5 | 1.5 | 2.5 | Nm | |
| 5.5 | 1.5 | 3.5 | Nm/(rad/s) |
| Robustness Test | Joint | PID | FOPID | PTID | FOPTID |
|---|---|---|---|---|---|
| Different trajectory | Joint-1 | 272.2704 | 272.4219 | 269.7661 | 272.2918 |
| Joint-2 | 194.0535 | 183.4217 | 191.3410 | 183.0013 | |
| Joint-3 | 61.4419 | 61.7051 | 57.8277 | 59.5320 | |
| Disturbance rejection | Joint-1 | 173.1580 | 154.1611 | 158.5644 | 157.0675 |
| Joint-2 | 328.8085 | 267.0632 | 245.4667 | 241.7147 | |
| Joint-3 | 48.0855 | 39.8093 | 36.7112 | 35.8962 | |
| Friction compensation | Joint-1 | 110.4676 | 122.6951 | 124.7802 | 134.4499 |
| Joint-2 | 184.6817 | 141.4255 | 143.2402 | 141.6841 | |
| Joint-3 | 68.1430 | 99.2728 | 74.6087 | 93.4725 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ataşlar-Ayyıldız, B. Robust Trajectory Tracking Control for Serial Robotic Manipulators Using Fractional Order-Based PTID Controller. Fractal Fract. 2023, 7, 250. https://doi.org/10.3390/fractalfract7030250
Ataşlar-Ayyıldız B. Robust Trajectory Tracking Control for Serial Robotic Manipulators Using Fractional Order-Based PTID Controller. Fractal and Fractional. 2023; 7(3):250. https://doi.org/10.3390/fractalfract7030250
Chicago/Turabian StyleAtaşlar-Ayyıldız, Banu. 2023. "Robust Trajectory Tracking Control for Serial Robotic Manipulators Using Fractional Order-Based PTID Controller" Fractal and Fractional 7, no. 3: 250. https://doi.org/10.3390/fractalfract7030250