
Compound Adaptive Fuzzy Synchronization Controller Design for Uncertain Fractional-Order Chaotic Systems
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Definitions and Lemmas
2.2. The Fuzzy Logic System
3. Main Results
3.1. System Description
3.2. Design of the Disturbance Observer
3.3. Controller Design
- All signals remain bounded in a closed-loop system.
- The synchronization error eventually converges to a small neighborhood of zero.
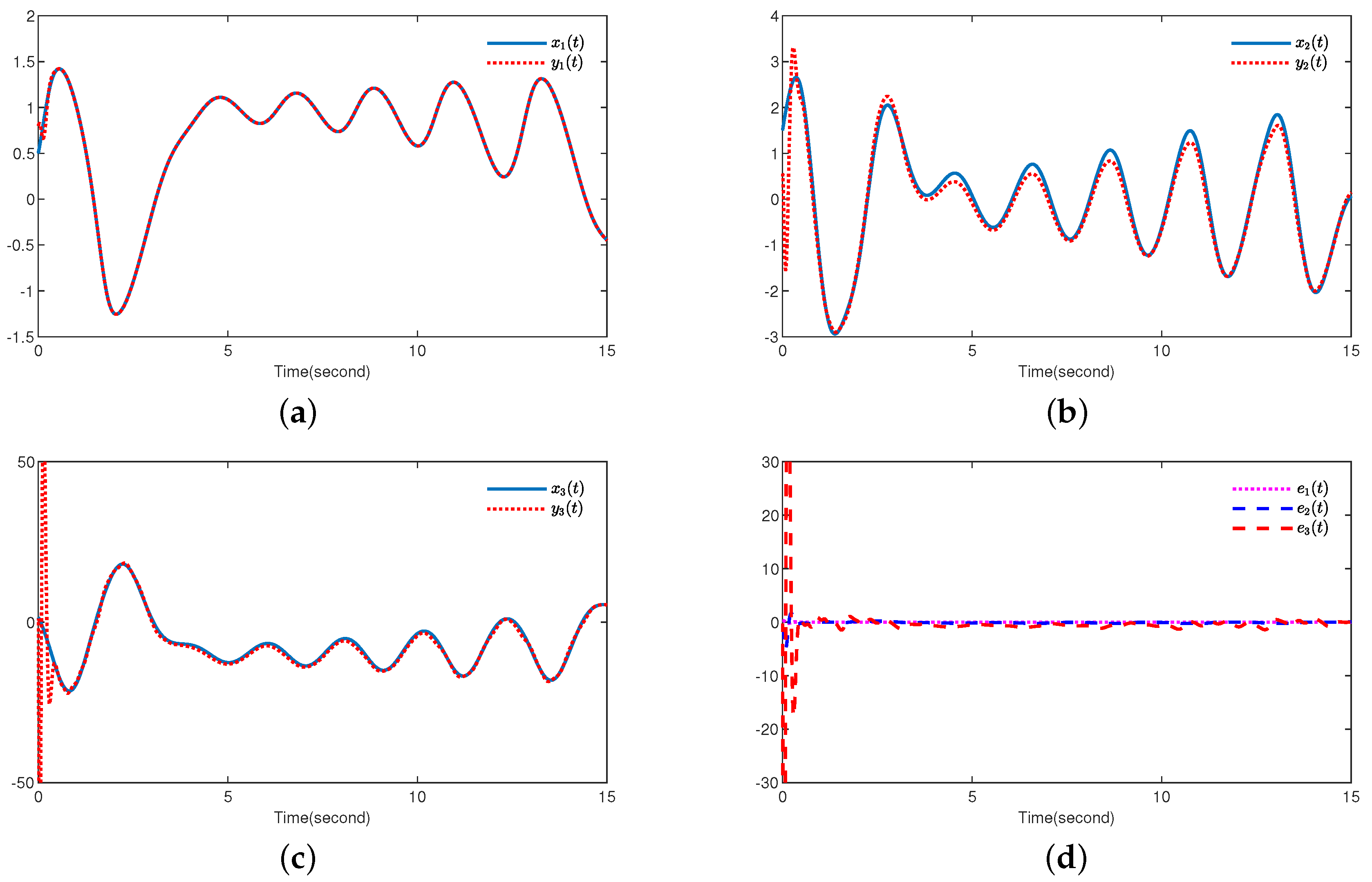
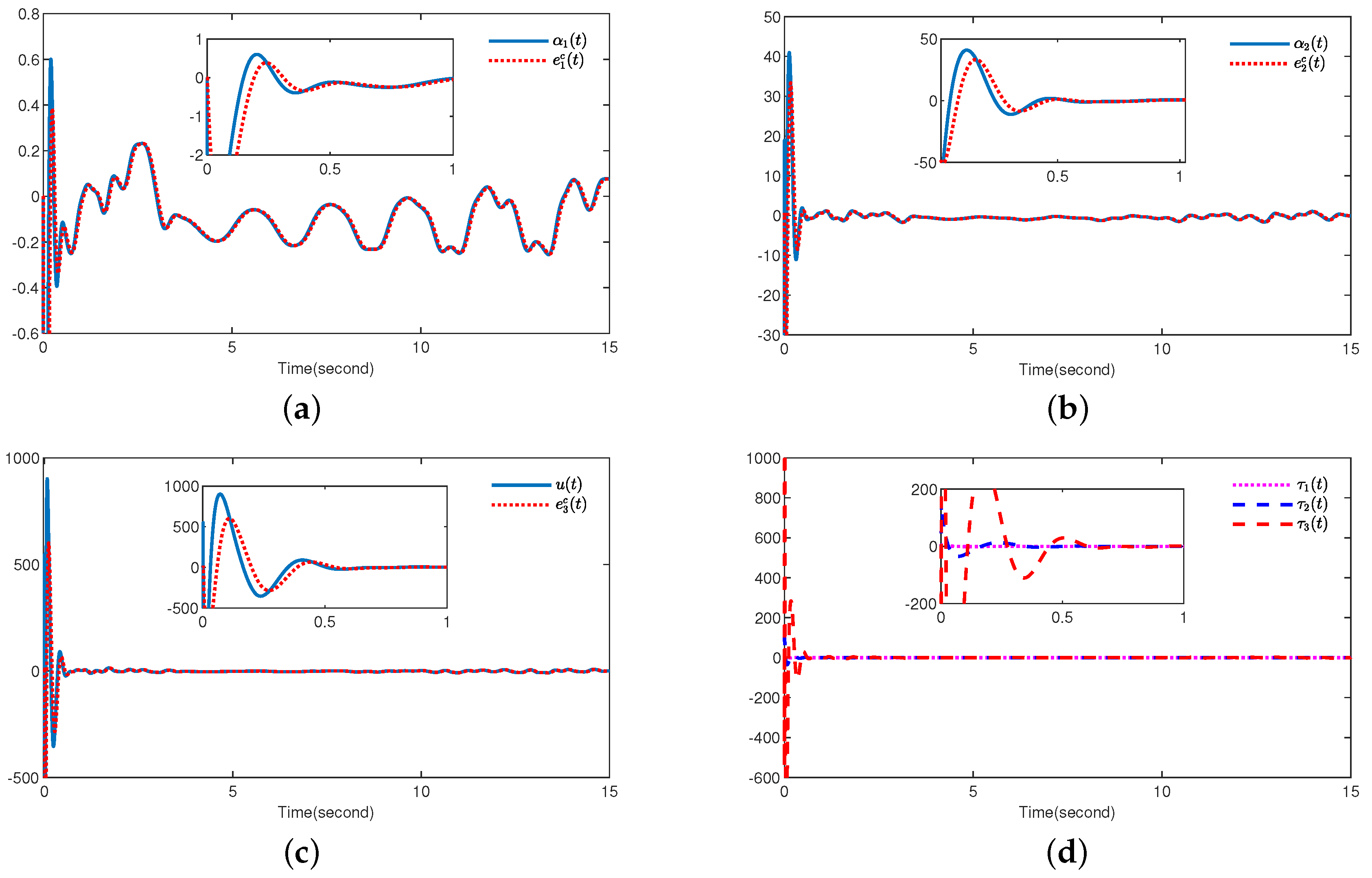
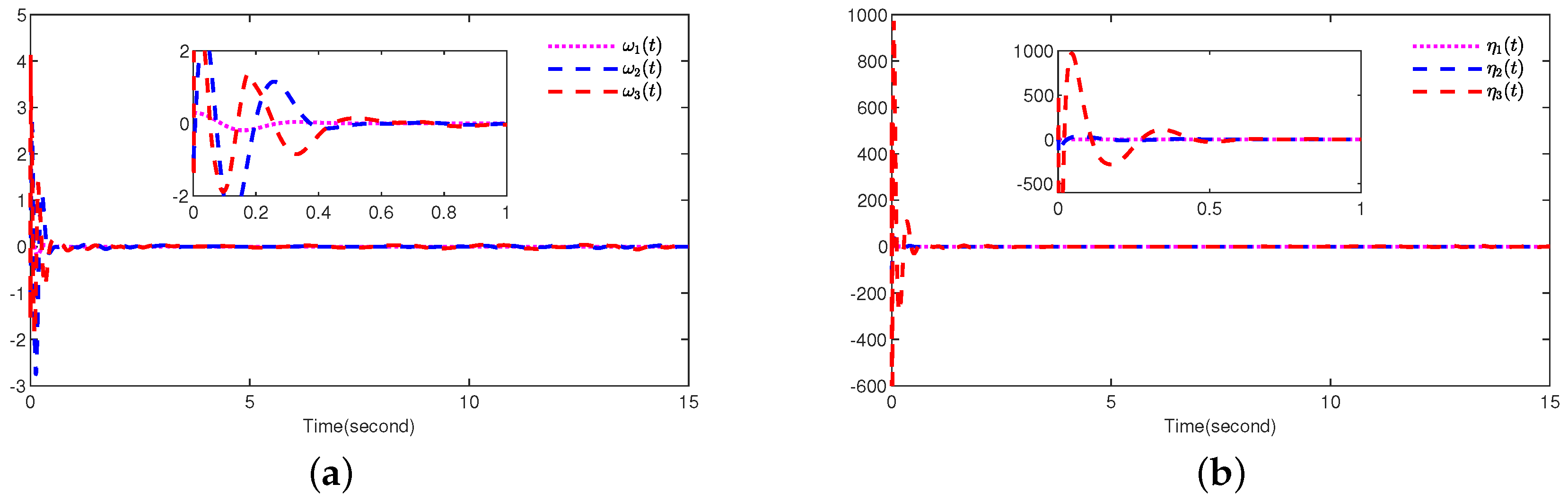
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; He, S.; Yousefpour, A.; Jahanshahi, H.; Repnik, R.; Perc, M. Chaos and complexity in a fractional-order financial system with time delays. Chaos Solitons Fractals 2020, 131, 109521. [Google Scholar] [CrossRef]
- Homaeinezhad, M.; Yaqubi, S.; Gholyan, H. Control of MIMO mechanical systems interacting with actuators through viscoelastic linkages. Mech. Mach. Theory 2020, 147, 103763. [Google Scholar] [CrossRef]
- Cunha-Filho, A.; Briend, Y.; de Lima, A.; Donadon, M. A new and efficient constitutive model based on fractional time derivatives for transient analyses of viscoelastic systems. Mech. Syst. Signal Process. 2021, 146, 107042. [Google Scholar] [CrossRef]
- He, Y.; Zhang, Y.; Sari, H.M.K.; Wang, Z.; Lü, Z.; Huang, X.; Liu, Z.; Zhang, J.; Li, X. New insight into Li metal protection: Regulating the Li-ion flux via dielectric polarization. Nano Energy 2021, 89, 106334. [Google Scholar] [CrossRef]
- Bouzeriba, A.; Boulkroune, A.; Bouden, T. Projective synchronization of two different fractional-order chaotic systems via adaptive fuzzy control. Neural Comput. Appl. 2016, 27, 1349–1360. [Google Scholar] [CrossRef]
- Khan, A.; Jahanzaib, L.S. Synchronization on the adaptive sliding mode controller for fractional order complex chaotic systems with uncertainty and disturbances. Int. J. Dyn. Control 2019, 7, 1419–1433. [Google Scholar] [CrossRef]
- Wei, Z. Dynamical behaviors of a chaotic system with no equilibria. Phys. Lett. A 2011, 376, 102–108. [Google Scholar] [CrossRef]
- Qi, G.; Chen, G.; Du, S.; Chen, Z.; Yuan, Z. Analysis of a new chaotic system. Phys. A Stat. Mech. Its Appl. 2005, 352, 295–308. [Google Scholar] [CrossRef]
- Fradkov, A.L.; Evans, R.J. Control of chaos: Methods and applications in engineering. Annu. Rev. Control 2005, 29, 33–56. [Google Scholar] [CrossRef]
- Yin, X.; Pan, L.; Cai, S. Robust adaptive fuzzy sliding mode trajectory tracking control for serial robotic manipulators. Robot. Comput. Integr. Manuf. 2021, 72, 101884. [Google Scholar] [CrossRef]
- Boulkroune, A.; Bouzeriba, A.; Bouden, T.; Azar, A.T. Fuzzy adaptive synchronization of uncertain fractional-order chaotic systems. In Advances in Chaos Theory and Intelligent Control; Springer: Berlin/Heidelberg, Germany, 2016; pp. 681–697. [Google Scholar]
- Huang, S.; Wang, J.; Xiong, L.; Liu, J.; Li, P.; Wang, Z.; Yao, G. Fixed-Time Backstepping Fractional-Order Sliding Mode Excitation Control for Performance Improvement of Power System. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 69, 956–969. [Google Scholar] [CrossRef]
- Ha, S.; Liu, H.; Li, S.; Liu, A. Backstepping-based adaptive fuzzy synchronization control for a class of fractional-order chaotic systems with input saturation. Int. J. Fuzzy Syst. 2019, 21, 1571–1584. [Google Scholar] [CrossRef]
- Shi, X.; Cheng, Y.; Yin, C.; Dadras, S.; Huang, X. Design of fractional-order backstepping sliding mode control for quadrotor UAV. Asian J. Control 2019, 21, 156–171. [Google Scholar] [CrossRef] [Green Version]
- Moezi, S.A.; Zakeri, E.; Eghtesad, M. Optimal adaptive interval type-2 fuzzy fractional-order backstepping sliding mode control method for some classes of nonlinear systems. ISA Trans. 2019, 93, 23–39. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H.; Zhang, S. Command filtered adaptive fuzzy control of fractional-order nonlinear systems. Eur. J. Control 2022, 63, 48–60. [Google Scholar] [CrossRef]
- Han, S. Fractional-order command filtered backstepping sliding mode control with fractional-order nonlinear disturbance observer for nonlinear systems. J. Frankl. Inst. 2020, 357, 6760–6776. [Google Scholar] [CrossRef]
- Xue, G.; Lin, F.; Li, S.; Liu, H. Adaptive fuzzy finite-time backstepping control of fractional-order nonlinear systems with actuator faults via command-filtering and sliding mode technique. Inf. Sci. 2022, 600, 189–208. [Google Scholar] [CrossRef]
- Liu, H.; Wang, H.; Cao, J.; Alsaedi, A.; Hayat, T. Composite learning adaptive sliding mode control of fractional-order nonlinear systems with actuator faults. J. Frankl. Inst. 2019, 356, 9580–9599. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, H.; Cao, J.; Li, S. Composite learning fuzzy synchronization for incommensurate fractional-order chaotic systems with time-varying delays. Int. J. Adapt. Control Signal Process. 2019, 33, 1739–1758. [Google Scholar] [CrossRef]
- Han, Z.; Li, S.; Liu, H. Composite learning sliding mode synchronization of chaotic fractional-order neural networks. J. Adv. Res. 2020, 25, 87–96. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Khooban, M.H. Sliding mode disturbance observer control based on adaptive synchronization in a class of fractional-order chaotic systems. Int. J. Adapt. Control Signal Process. 2019, 33, 462–474. [Google Scholar] [CrossRef]
- Li, Z.; Ma, X.; Li, Y. Nonlinear partially saturated control of a double pendulum offshore crane based on fractional-order disturbance observer. Autom. Constr. 2022, 137, 104212. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Adaptive fractional-order sliding-mode disturbance observer-based robust theoretical frequency controller applied to hybrid wind–diesel power system. ISA Trans. 2022; in press. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Li, S.; Chen, Y. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M. Fractional order partial hyperbolic differential equations involving Caputo’s derivative. Stud. Univ. Babes-Bolyai Math 2012, 57, 469–479. [Google Scholar]
- Shen, J.; Lam, J. Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 2014, 50, 547–551. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Li, J.; Cao, J.; Liu, H. State observer-based fuzzy echo state network sliding mode control for uncertain strict-feedback chaotic systems without backstepping. Chaos Solitons Fractals 2022, 162, 112442. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Robust adaptive backstepping control of uncertain fractional-order nonlinear systems with input time delay. Math. Comput. Simul. 2022, 196, 251–272. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H. Command filtered adaptive neural network synchronization control of fractional-order chaotic systems subject to unknown dead zones. J. Frankl. Inst. 2021, 358, 3376–3402. [Google Scholar] [CrossRef]
- Petráš, I. Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Zhang, X. Compound Adaptive Fuzzy Synchronization Controller Design for Uncertain Fractional-Order Chaotic Systems. Fractal Fract. 2022, 6, 652. https://doi.org/10.3390/fractalfract6110652
Liu F, Zhang X. Compound Adaptive Fuzzy Synchronization Controller Design for Uncertain Fractional-Order Chaotic Systems. Fractal and Fractional. 2022; 6(11):652. https://doi.org/10.3390/fractalfract6110652
Chicago/Turabian StyleLiu, Fengyan, and Xiulan Zhang. 2022. "Compound Adaptive Fuzzy Synchronization Controller Design for Uncertain Fractional-Order Chaotic Systems" Fractal and Fractional 6, no. 11: 652. https://doi.org/10.3390/fractalfract6110652