
Imaging Concrete Structures with Ultrasonic Shear Waves—Technology Development and Demonstration of Capabilities
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
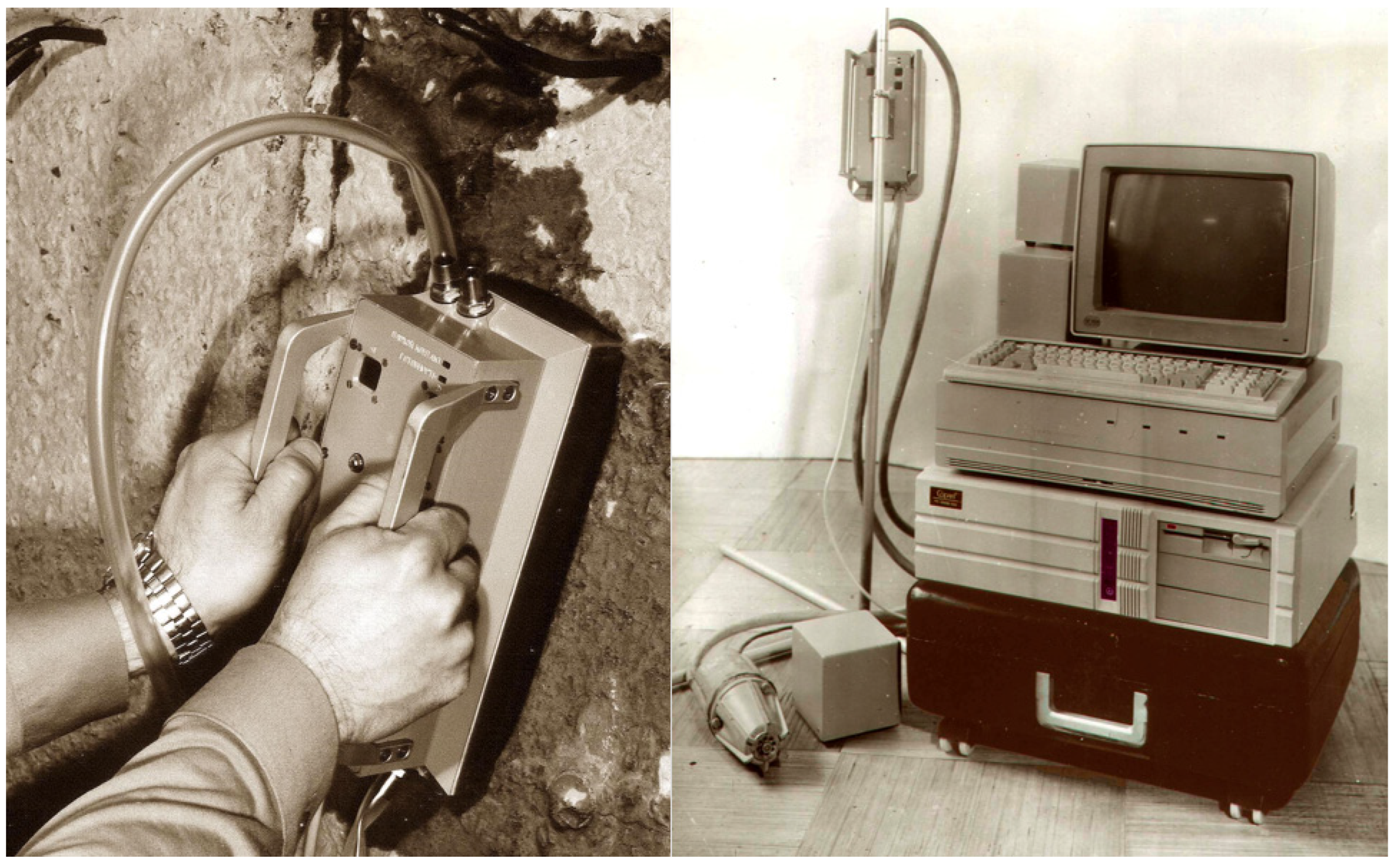
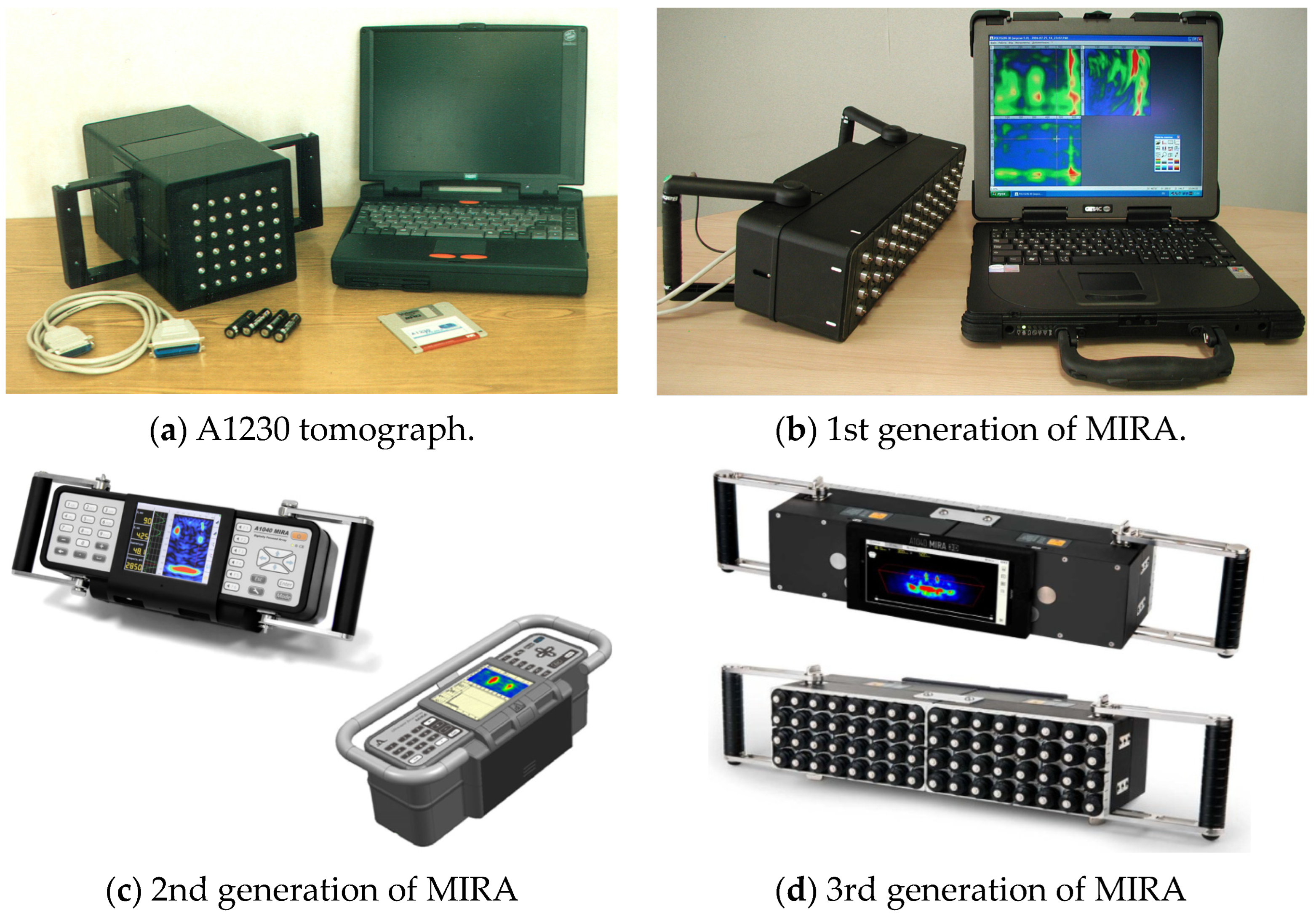
2. Historical Development of Ultrasonic Shear Wave Devices
3. Description and Main Features of MIRA
4. Review of MIRA Applications
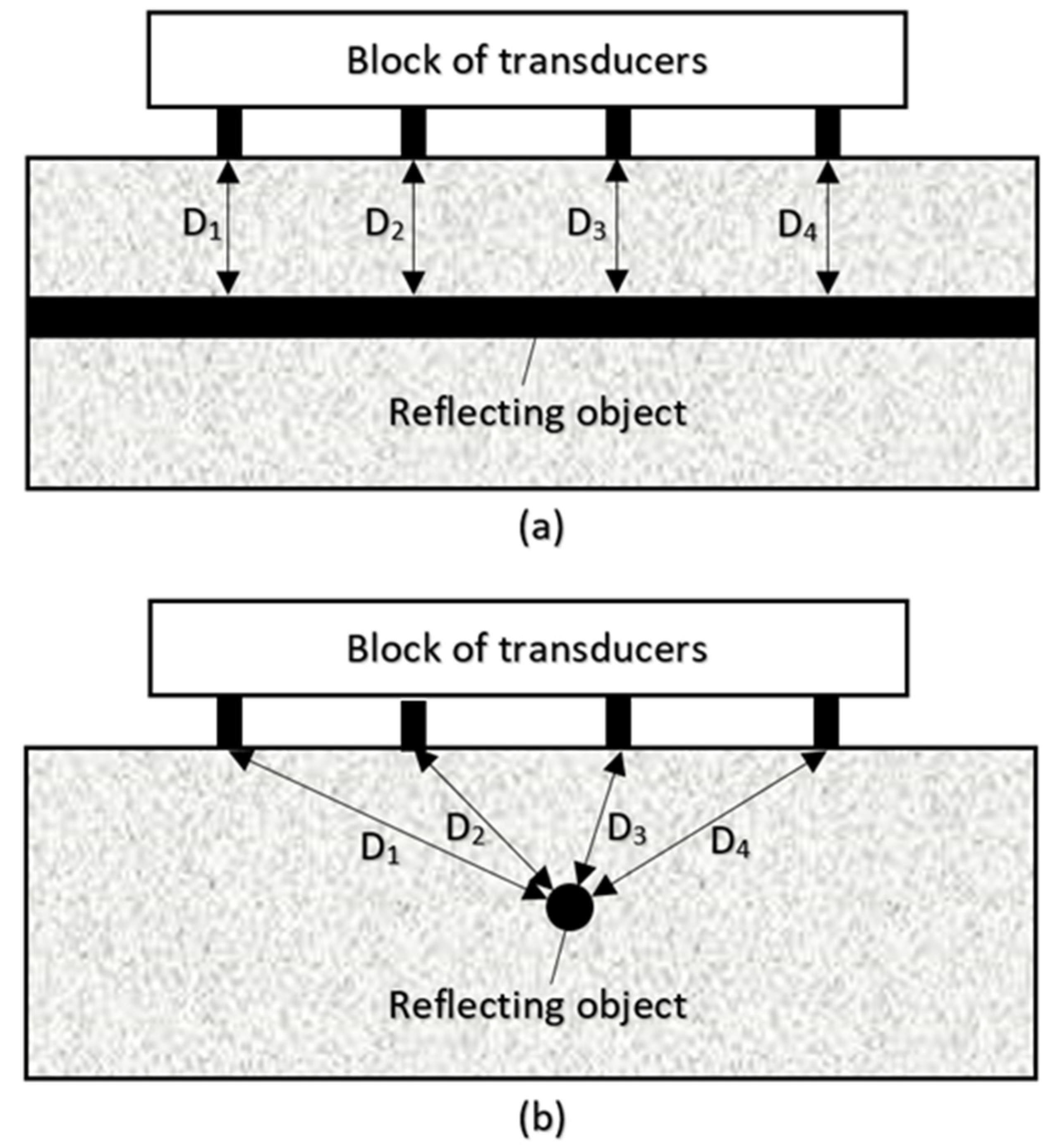
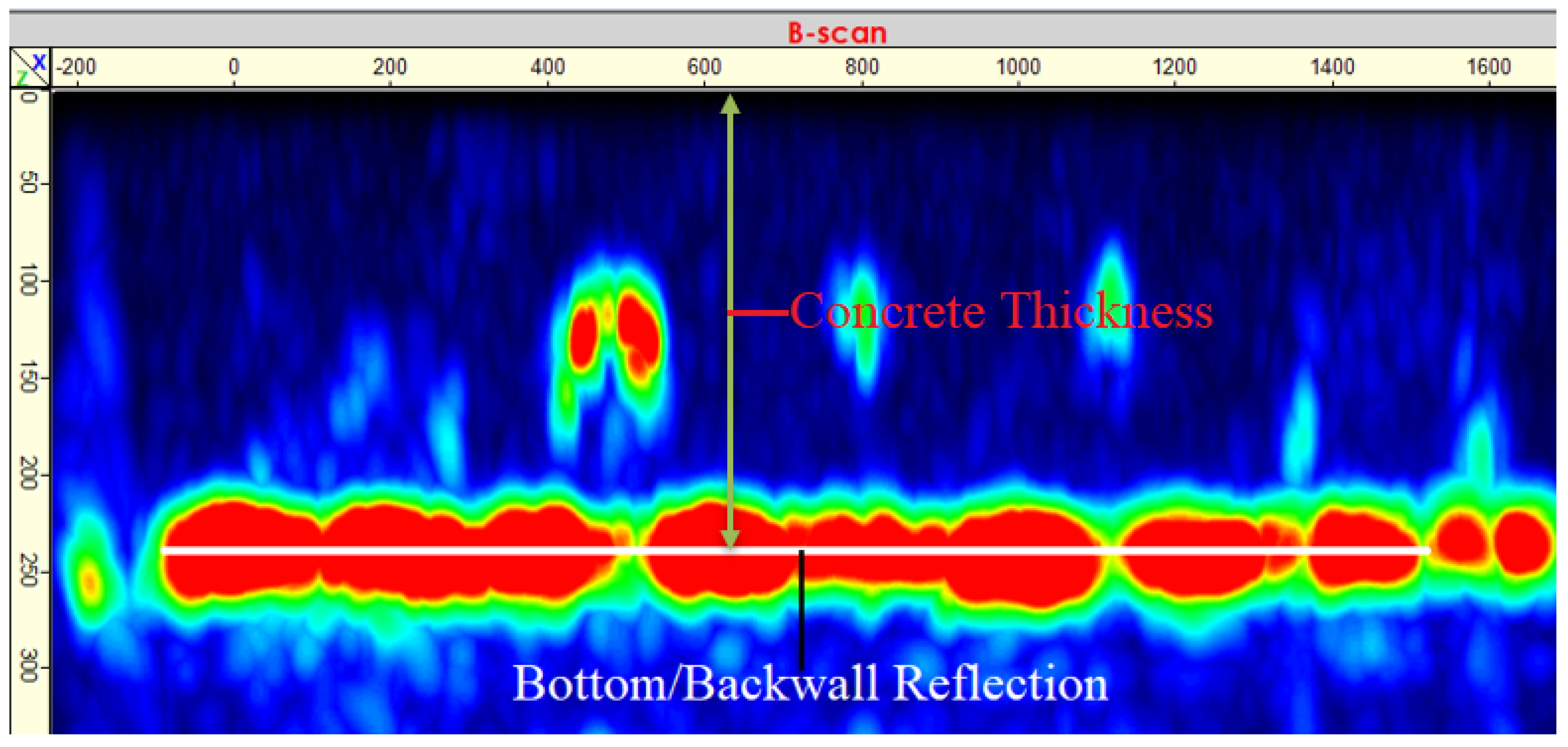
4.1. Concrete Thickness Measurement
4.2. Rebar Detection and Evaluation
4.3. Concrete Delamination
4.4. Concrete Voids and Honeycombs
4.5. Grouting Condition of Embedded Ducts
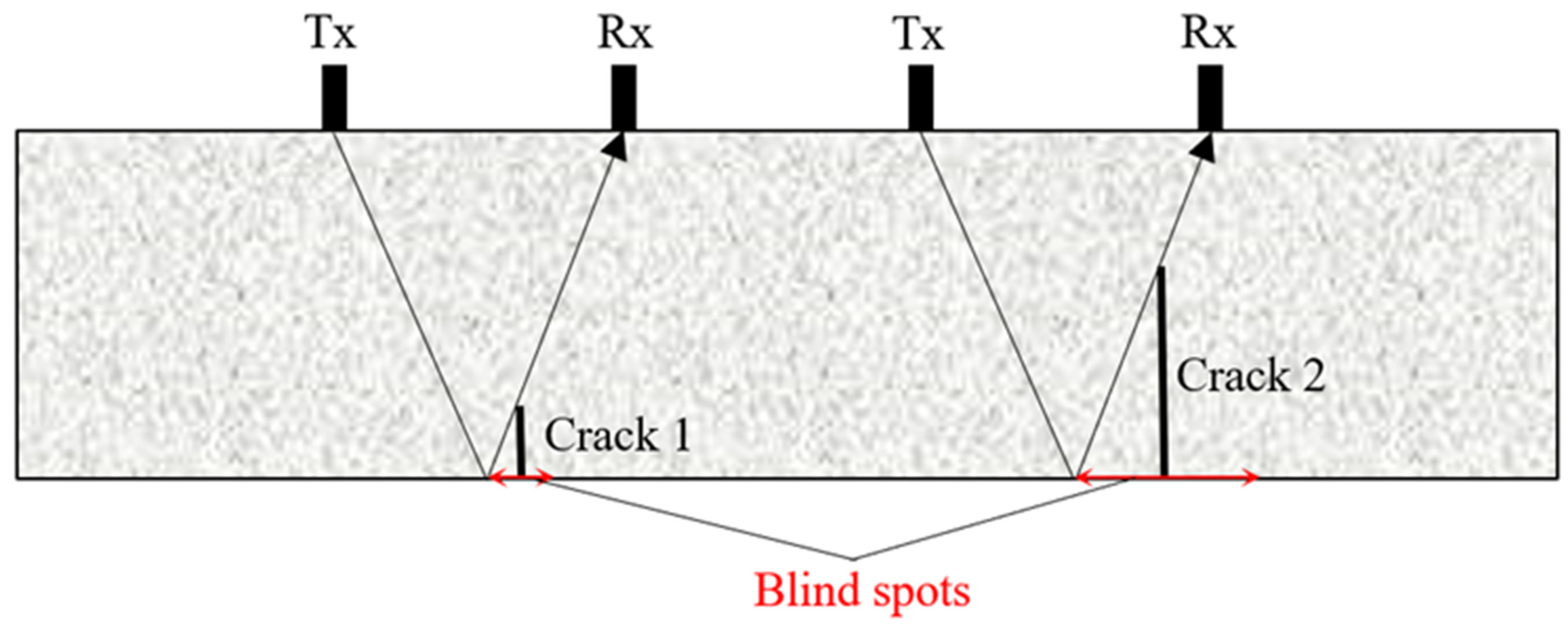
4.6. Characterization of Visible Cracks
5. Laboratory Experiments
5.1. 3D-SAFT Algorithm
5.1.1. Determine Region of Interest
5.1.2. Compute the Sound Path Length for Each Image Point
5.1.3. Assign Intensity Value for Each Image Point
5.1.4. Superposition of Images Obtained from All A-Scans
- = Aggregated intensity value for image point P
- N = the number of A-scans in the aperture.
5.2. Experimental Results and Discussion
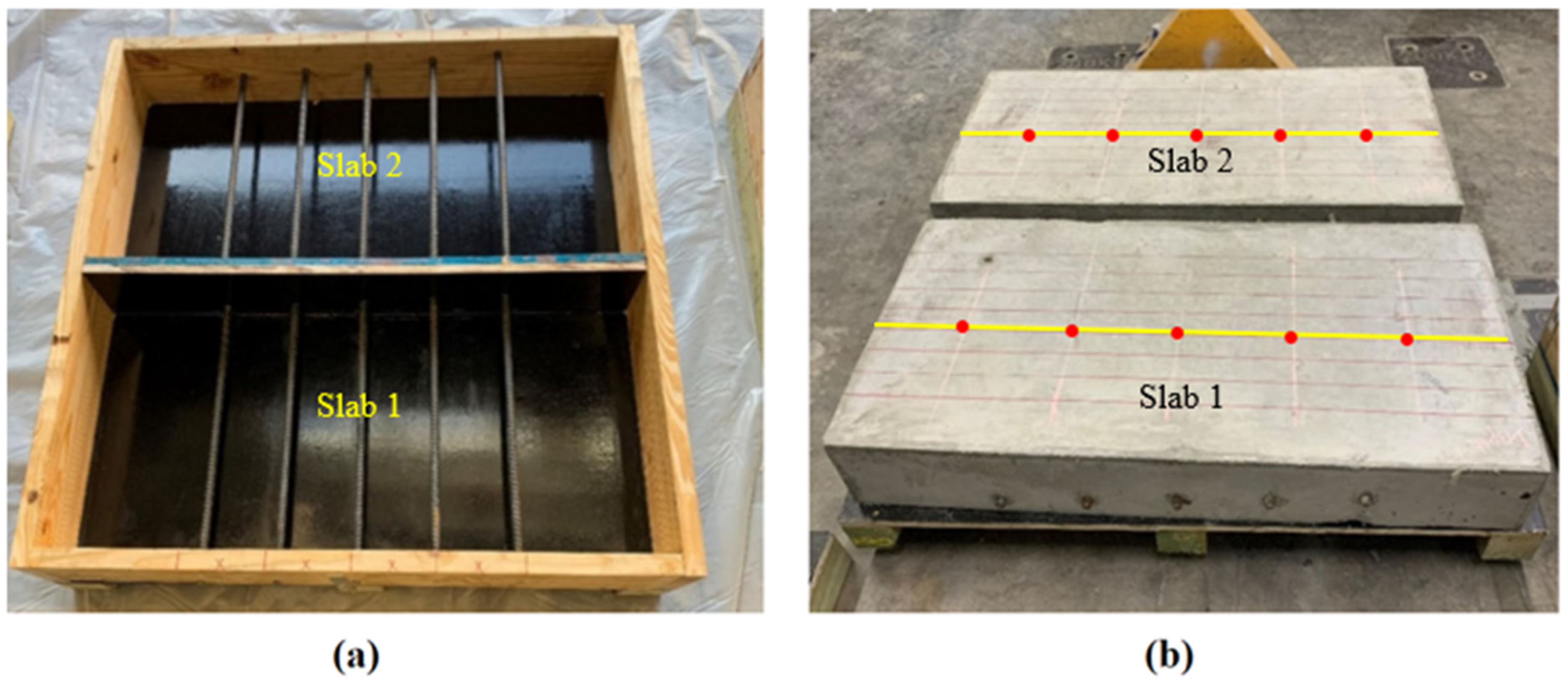
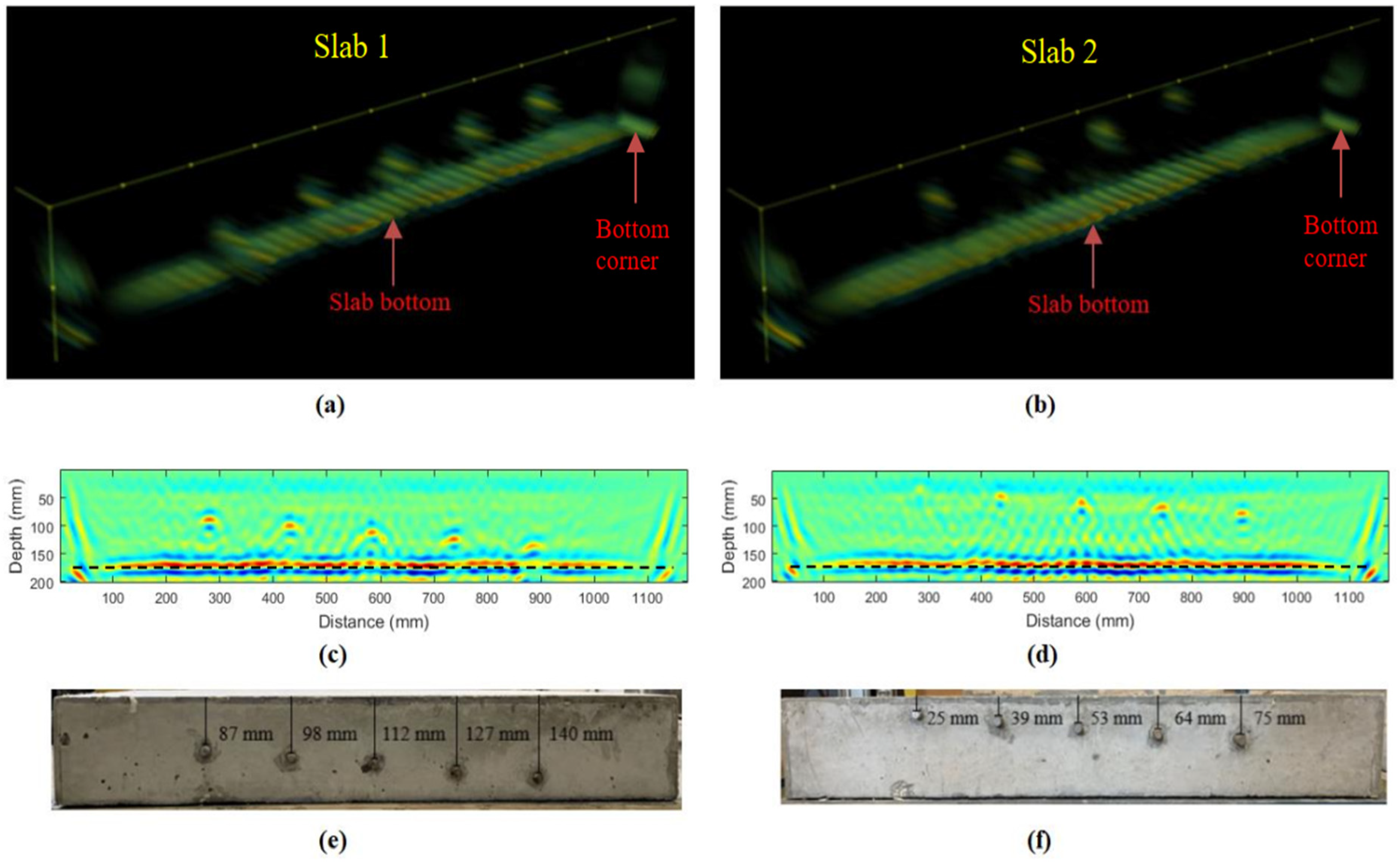
5.2.1. Slabs with Rebars of Varying Depth
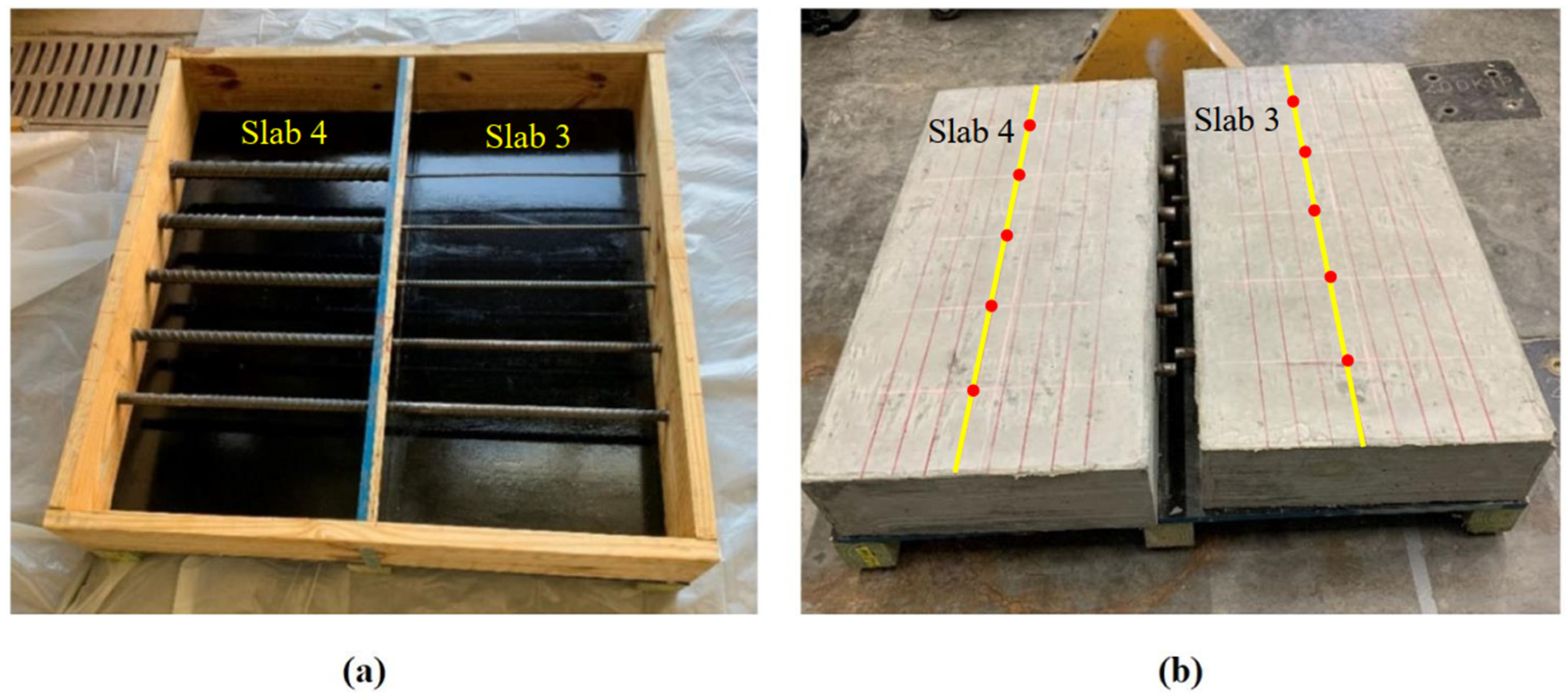
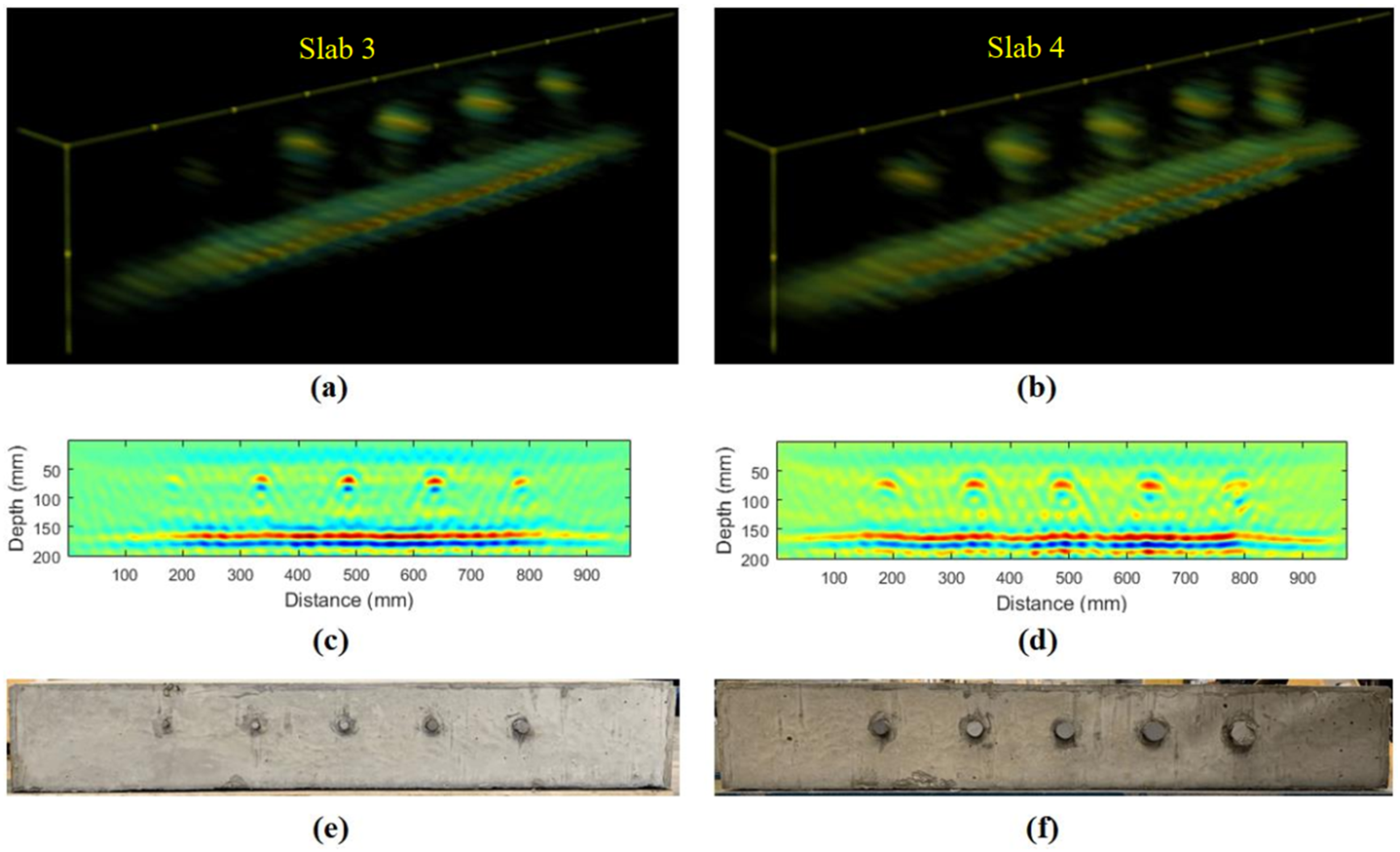
5.2.2. Slabs with Rebars of Varying Size
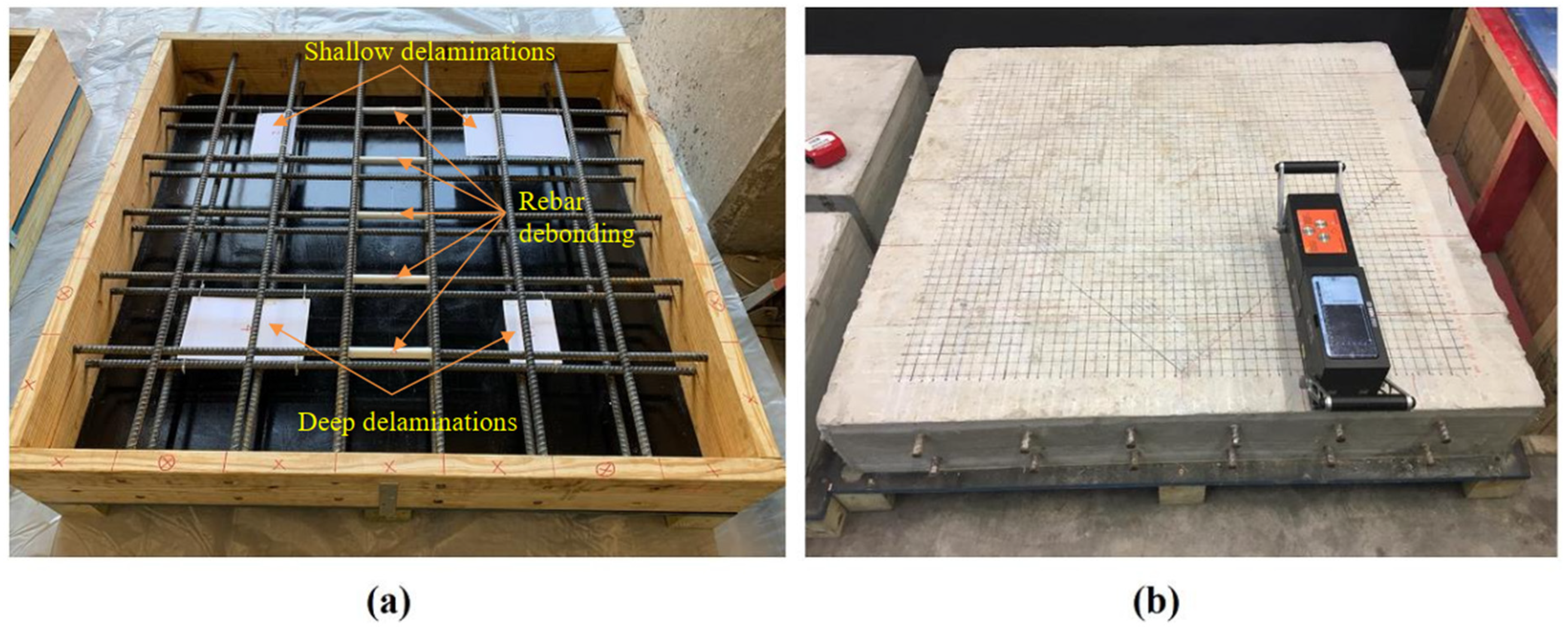
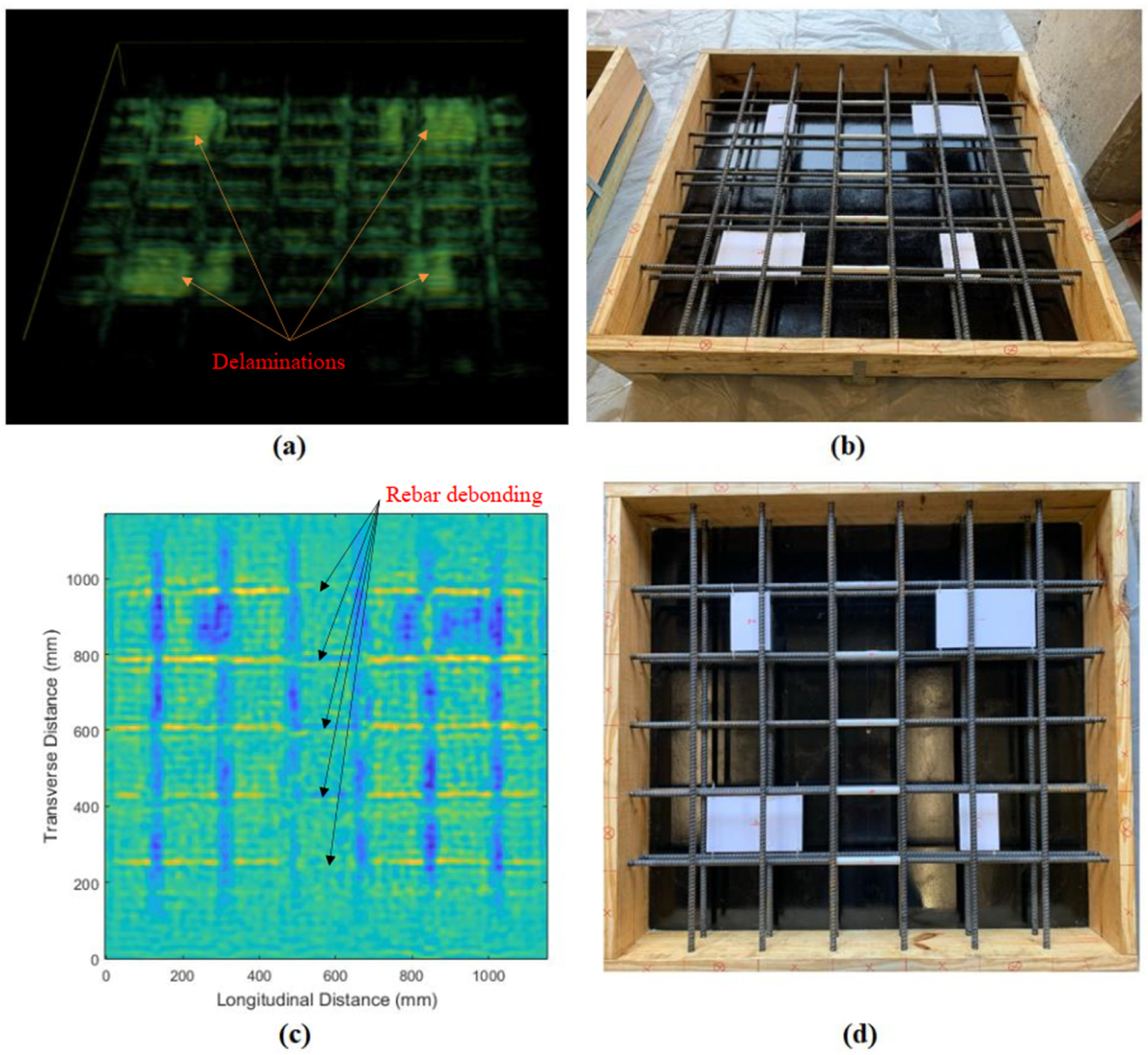
5.2.3. Slab with Rebar Debonding and Concrete Delamination
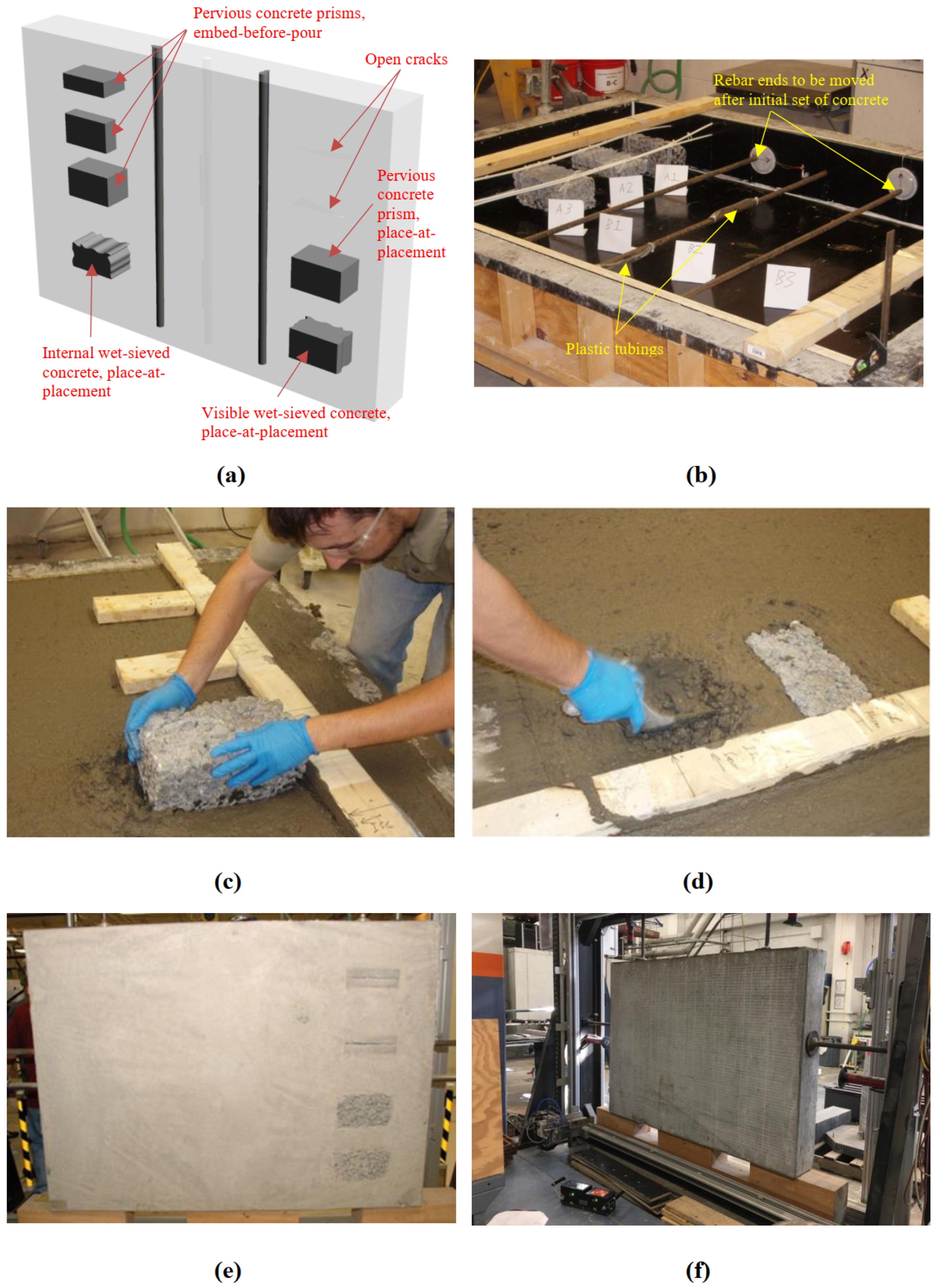
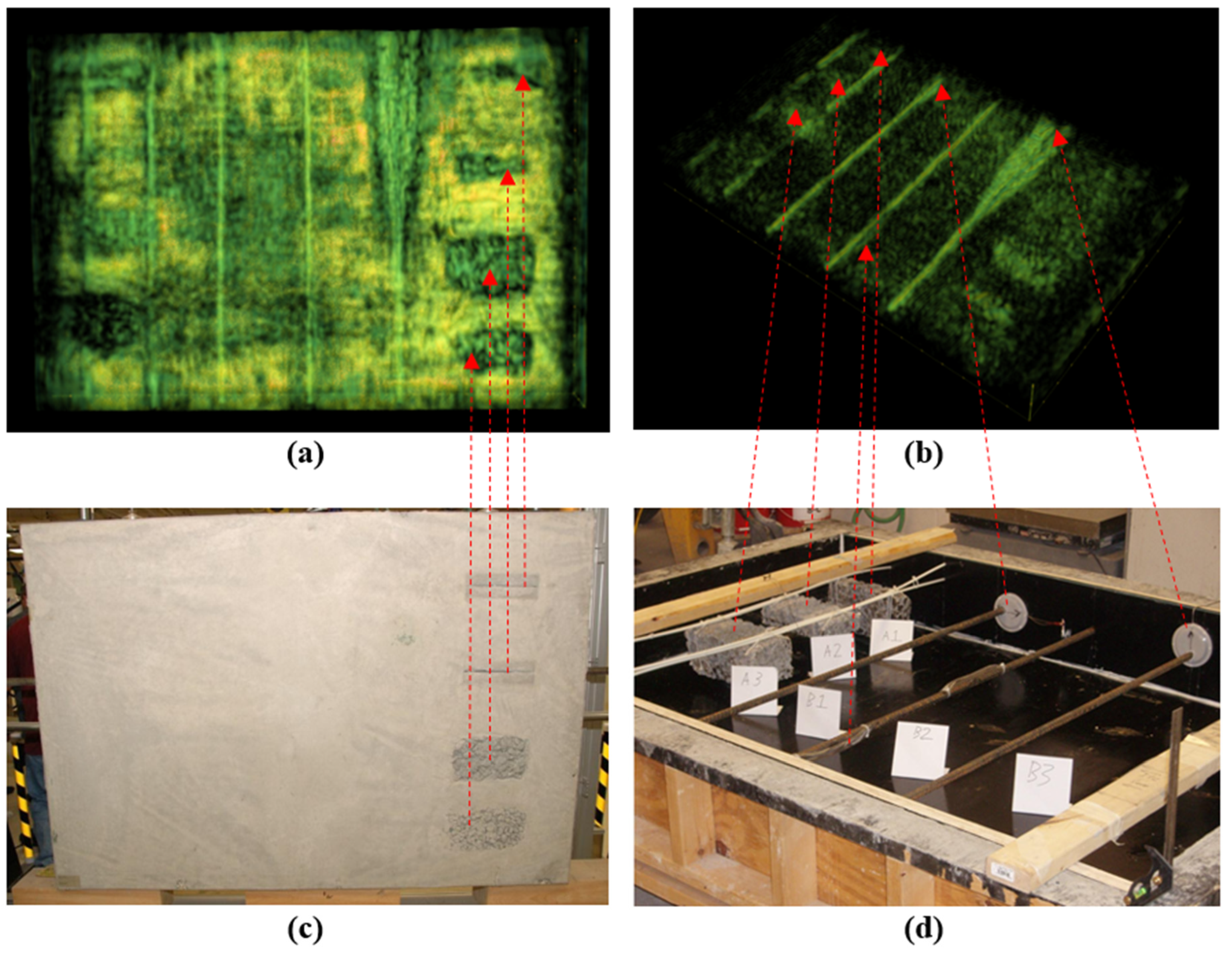
5.2.4. Slab with Voids, Honeycombs, and Cracks
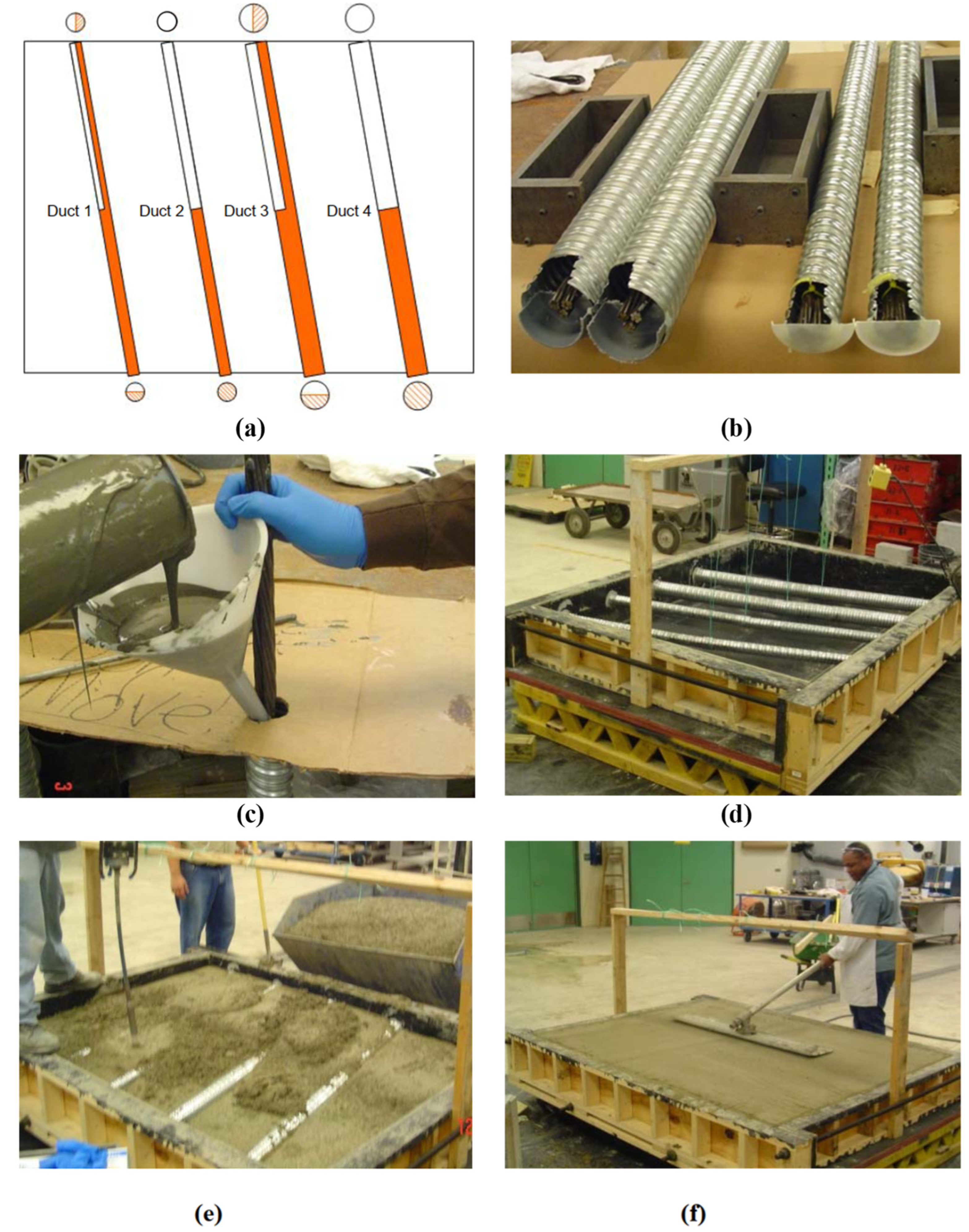
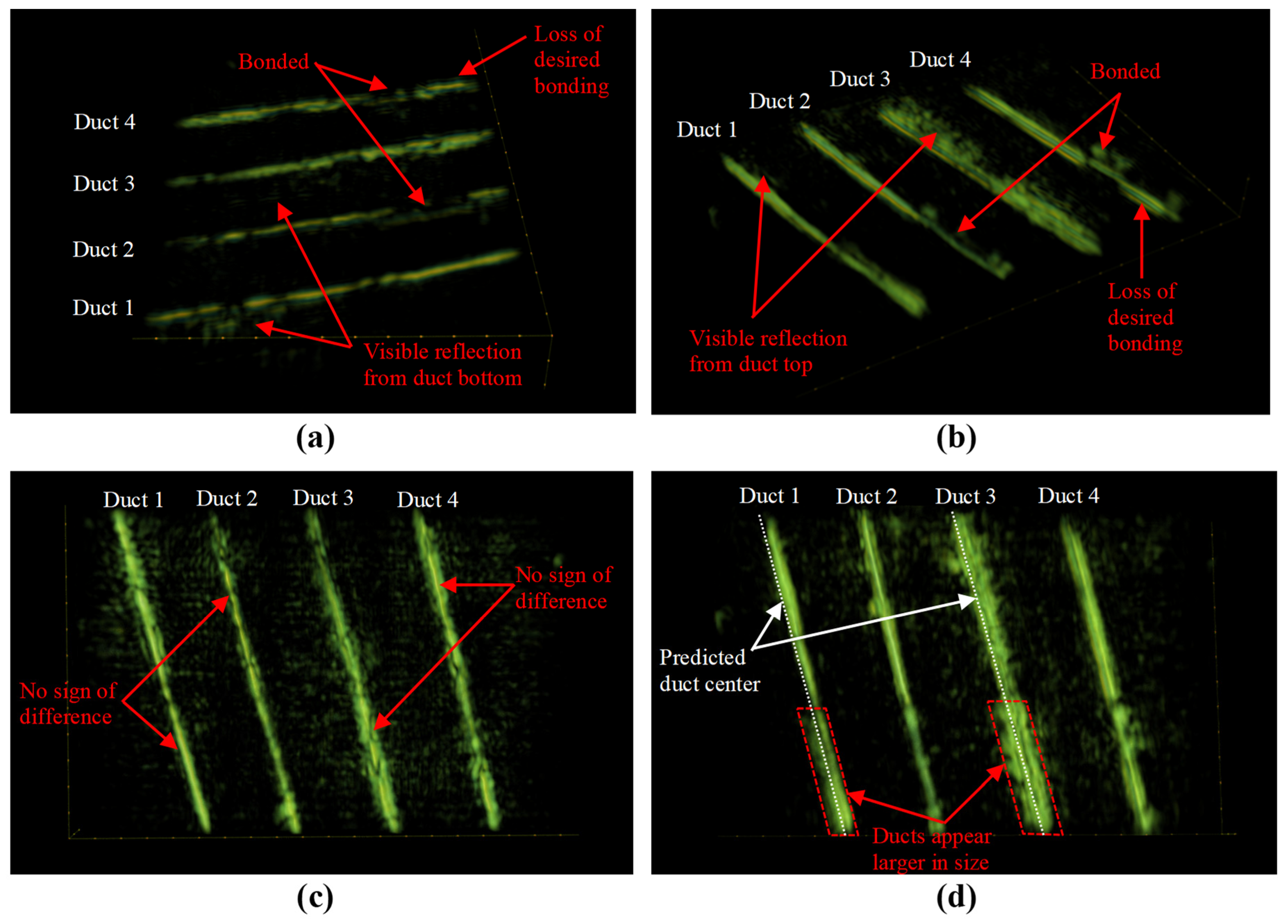
5.2.5. Slab with Metal Ducts
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Popovics, J.S.; Roesler, J.R.; Bittner, J.; Amirkhanian, A.N.; Brand, A.S.; Gupta, P.; Flowers, K. Ultrasonic Imaging for Concrete Infrastructure Condition Assessment and Quality Assurance; Illinois Center for Transportation: Rantoul, IL, USA, 2017. [Google Scholar]
- Aldo, O.; Samokrutov, A.A.; Samokrutov, P.A. Assessment of concrete structures using the Mira and Eyecon ultrasonic shear wave devices and the SAFT-C image reconstruction technique. Constr. Build. Mater. 2013, 38, 1276–1291. [Google Scholar]
- Sansalone, M.; Carino, N.J. Impact-Echo: A Method for Flaw Detection in Concrete Using Transient Stress Waves; US Department of Commerce, National Bureau of Standards, Center for Building Technology, Structures Division: Washington, DC, USA, 1986. [Google Scholar]
- Shvaldykin, V.G.; Yakovlev, N.N. Material for the Damper of the Ultrasonic Transducer. USSR Patent SU 1280535 A1, 30 November 1986. [Google Scholar]
- Kozlov, V.N.; Shevaldykin, V.G.; Yakovlev, N.N. Ultrasonic Low-Frequency Piezoelectric Transducer. USSR Patent SU 1425534 A1, 23 September 1988. [Google Scholar]
- Kozlov, V.N.; Shevaldykin, V.G.; Yakovlev, N.N. Experimental Evaluation of Ultrasonic Attenuation in Concrete. Defectoscopy 1988, 2, 67–75. [Google Scholar]
- Kovalev, A.V.; Shevaldykin, V.G.; Kozlov, V.N.; Yakovlev, N.N. Some problems in the development of the ultrasonic echo method for testing materials and products. Instrum. Control Syst. 1988, 5, 18. [Google Scholar]
- Kozlov, V.N.; Shevaldykin, V.G.; Yakovlev, N.N. Ultrasonic Piezo Transducer. USSR Patent SU 1388785 A1, 15 April 1988. [Google Scholar]
- Kozlov, V.N.; Samokrutov, A.A.; Yakovlev, N.N.; K.A.V.; Shevaldykin, V.G. Acoustic B- and C-tomography of coarse-grained materials by a pulsed echo method. Devices Control Syst. 1989, 7, 21–24. [Google Scholar]
- Kovalev, A.V.; Kozlov, V.N.; Samokrutov, A.A.; Shevaldykin, V.G.; Yakovlev, N.N. Pulse echo method for testing concrete. Interference and spatial selection. Defectoscopy 1990, 2, 29–41. [Google Scholar]
- Kozlov, V.N.; Samokrutov, A.A.; Shevaldykin, V.G. Ultrasonic Antenna Array in the Form of a Two-Dimensional Matrix. The USSR Federation Patent 2,080,592, 27 May 1997. [Google Scholar]
- Shevaldykin, V.G.; Samokrutov, A.A.; Kozlov, V.N. Ultrasonic low-frequency short-pulse transducers with dry point contact. Development and application. In Proceedings of the International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 16–19 September 2003. [Google Scholar]
- Kozlov, V.N.; Samokrutov, A.A.; Shevaldykin, V.G. Ultrasonic Low-Frequency Transducer. The USSR Federation Patent 2,082,163, 20 June 1997. [Google Scholar]
- Shevaldykin, V.G.; Samokrutov, A.A.; Kozlov, V.N. New instrumental and methodological possibilities of ultrasonic sounding of composites and plastics. Factory laboratory. Diagn. Mater. 1998, 64, 29–39. [Google Scholar]
- Shevaldykin, V.G.; Kozlov, V.N.; Samokrutov, A.A. Inspection of concrete with an ultrasonic echo-pulse tomograph with dry contact. Control. Diagn. 1998, 1, 49–51. [Google Scholar]
- VShevaldykin, G.; Samokrutov, A.A.; Kozlov, V.N. Transverse ultrasonic waves in pulse echo flaw detection of pipeline support concrete. In Proceedings of the 3rd International Conference. “Diagnostics of Pipelines”, Moscow, Russia; 2001. [Google Scholar]
- Flaherty, J.J.; Erikson, K.R.; van Lund, M. Synthetic Aperture Ultrasonic Imaging Systems. U.S. Patent 3,548,642, 22 December 1970. [Google Scholar]
- Langenberg, K.J.; Berger, M.; Kreutter, T.; Mayer, K.; Schmitz, V. Synthetic aperture focusing technique signal processing. NDT Int. 1986, 19, 177–189. [Google Scholar] [CrossRef]
- Martinez, O.; Parrilla, M.; Izquierdo, M.A.G.; Ullate, L.G. Application of digital signal processing techniques to synthetic aperture focusing technique images. Sens. Actuators A Phys. 1999, 76, 448–456. [Google Scholar] [CrossRef]
- Spies, M.; Rieder, H. Synthetic aperture focusing of ultrasonic inspection data to enhance the probability of detection of defects in strongly attenuating materials. NDT E Int. 2010, 43, 425–431. [Google Scholar] [CrossRef]
- Spies, M.; Rieder, H.; Dillhöfer, A.; Schmitz, V.; Müller, W. Synthetic aperture focusing and time-of-flight diffraction ultrasonic imaging—Past and present. J. Nondestruct. Eval. 2012, 31, 310–323. [Google Scholar] [CrossRef]
- Mayer, K.; Marklein, R.; Langenberg, K.J.; Kreutter, T. Three-dimensional imaging system based on Fourier transform synthetic aperture focusing technique. Ultrasonics 1990, 28, 241–255. [Google Scholar] [CrossRef]
- Krause, M.; Mielentz, F.; Milman, B.; Müller, W.; Schmitz, V.; Wiggenhauser, H. Ultrasonic imaging of concrete members using an array system. NDT E Int. 2001, 34, 403–408. [Google Scholar] [CrossRef]
- Schickert, M.; Krause, M.; Muller, W. Ultrasonic imaging of concrete elements using reconstruction by synthetic aperture focusing technique. J. Mater. Civ. Eng. 2003, 15, 235–246. [Google Scholar] [CrossRef]
- Tong, J.H.; Chiu, C.L.; Wang, C.Y. Improved synthetic aperture focusing technique by Hilbert-Huang transform for imaging defects inside a concrete structure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 2512–2521. [Google Scholar] [CrossRef]
- Ganguli, A.; Rappaport, C.M.; Abramo, D.; Wadia-Fascetti, S. Synthetic aperture imaging for flaw detection in a concrete medium. NDT E Int. 2012, 45, 79–90. [Google Scholar] [CrossRef]
- Shokouhi, P.; Wolf, J.; Wiggenhauser, H. Detection of delamination in concrete bridge decks by joint amplitude and phase analysis of ultrasonic array measurements. J. Bridge Eng. 2014, 19, 04013005. [Google Scholar] [CrossRef]
- Tong, J.H.; Chiu, C.L.; Wang, C.Y.; Liao, S.T. Influence of rebars on elastic-wave-based synthetic aperture focusing technique images for detecting voids in concrete structures. NDT E Int. 2014, 68, 33–42. [Google Scholar] [CrossRef]
- Bittner, J.A.; Spalvier, A.; Popovics, J.S. Internal imaging of concrete elements. Concr. Int. 2018, 40, 57–63. [Google Scholar]
- Lin, S.; Shams, S.; Choi, H.; Azari, H. Ultrasonic imaging of multi-layer concrete structures. NDT E Int. 2018, 98, 101–109. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Zayed, T. Automated visualization of concrete bridge deck condition from GPR data. NDT E Int. 2019, 102, 120–128. [Google Scholar]
- Dinh, K.; Gucunski, N.; Tran, K.; Novo, A.; Nguyen, T. Full-resolution 3D imaging for concrete structures with dual-polarization GPR. Autom. Constr. 2021, 125, 103652. [Google Scholar]
- VKozlov, N.; Samokrutov, A.A.; Shevaldykin, V.G. Thickness measurements and flaw detection in concrete using ultrasonic echo method. Nondestruct. Test. Eval. 1997, 13, 73–84. [Google Scholar] [CrossRef]
- Hoegh, K.; Khazanovich, L.; Yu, H.T. Ultrasonic tomography for evaluation of concrete pavements. Transp. Res. Rec. 2011, 2232, 85–94. [Google Scholar] [CrossRef]
- Vancura, M.; Khazanovich, L.; Barnes, R. Concrete Pavement Thickness Variation Assessment with Cores and Nondestructive Testing Measurements. Transp. Res. Rec. 2013, 2347, 61–68. [Google Scholar] [CrossRef]
- Chen, R.; Tran, K.T.; Dinh, K.; Ferraro, C.C. Evaluation of Ultrasonic SH-Waveform Tomography for Determining Cover Thickness and Rebar Size in Concrete Structures. J. Nondestruct. Eval. 2022, 41, 1–16. [Google Scholar] [CrossRef]
- Chen, R.; Tran, K.T.; La, H.M.; Rawlinson, T.; Dinh, K. Detection of delamination and rebar debonding in concrete structures with ultrasonic SH-waveform tomography. Autom. Constr. 2022, 133, 104004. [Google Scholar]
- Jana, D. Delamination—A State-of-the-art Review. In Proceedings of the Twenty-Ninth Conference on Cement Microscopy, Quebec City, QC, Canada, 20–24 May 2007. [Google Scholar]
- Shokouhi, P.; Wöstmann, J.; Schneider, G.; Milmann, B.; Taffe, A.; Wiggenhauser, H. Nondestructive detection of delamination in concrete slabs: Multiple-method investigation. Transp. Res. Rec. 2011, 2251, 103–113. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Tran, K.T.; Gucunski, N. Detection of bridge-deck delamination using full ultrasonic waveform tomography. J. Infrastruct. Syst. 2017, 23, 04016027. [Google Scholar]
- Choi, P.; Kim, D.H.; Lee, B.H.; Won, M.C. Application of ultrasonic shear-wave tomography to identify horizontal crack or delamination in concrete pavement and bridge. Constr. Build. Mater. 2016, 121, 81–91. [Google Scholar] [CrossRef]
- Clayton, D.A.; Smith, C.M.; Ferraro, C.C.; Nelson, J.; Khazanovic, L.; Hoegh, K.; Chintakunta, S.; Popovics, J.; Choi, H.; Ham, S. Evaluation of Ultrasonic Techniques on Concrete Structures; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2013. [Google Scholar]
- Terzioglu, T.; Karthik, M.M.; Hurlebaus, S.; Hueste, M.B.D.; Maack, S.; Woestmann, J.; Wiggenhauser, H.; Krause, M.; Miller, P.K.; Olson, L.D. Nondestructive evaluation of grout defects in internal tendons of post-tensioned girders. NDT E Int. 2018, 99, 23–35. [Google Scholar] [CrossRef]
- Shin, S.W.; Zhu, J.; Min, J.; Popovics, J.S. Crack depth estimation in concrete using energy transmission of surface waves. ACI Mater. J. 2008, 105, 510. [Google Scholar]
- Lin, S.; Wang, Y. Crack-Depth estimation in concrete elements using ultrasonic shear-horizontal waves. J. Perform. Constr. Facil. 2020, 34, 04020064. [Google Scholar] [CrossRef]
- Hiltunen, D.R.; Algernon, D.; Ferraro, C.C. Validation of Nondestructive Testing Equipment for Concrete; University of Florida: Gainesville, FL, USA, 2010. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dinh, K.; Tran, K.; Gucunski, N.; Ferraro, C.C.; Nguyen, T. Imaging Concrete Structures with Ultrasonic Shear Waves—Technology Development and Demonstration of Capabilities. Infrastructures 2023, 8, 53. https://doi.org/10.3390/infrastructures8030053
Dinh K, Tran K, Gucunski N, Ferraro CC, Nguyen T. Imaging Concrete Structures with Ultrasonic Shear Waves—Technology Development and Demonstration of Capabilities. Infrastructures. 2023; 8(3):53. https://doi.org/10.3390/infrastructures8030053
Chicago/Turabian StyleDinh, Kien, Khiem Tran, Nenad Gucunski, Christopher C. Ferraro, and Tu Nguyen. 2023. "Imaging Concrete Structures with Ultrasonic Shear Waves—Technology Development and Demonstration of Capabilities" Infrastructures 8, no. 3: 53. https://doi.org/10.3390/infrastructures8030053