
Shaking Table Design for Testing Earthquake Early Warning Systems

Abstract
:1. Introduction
2. Description of a Seismic Simulation Experiment Using Shaking Table
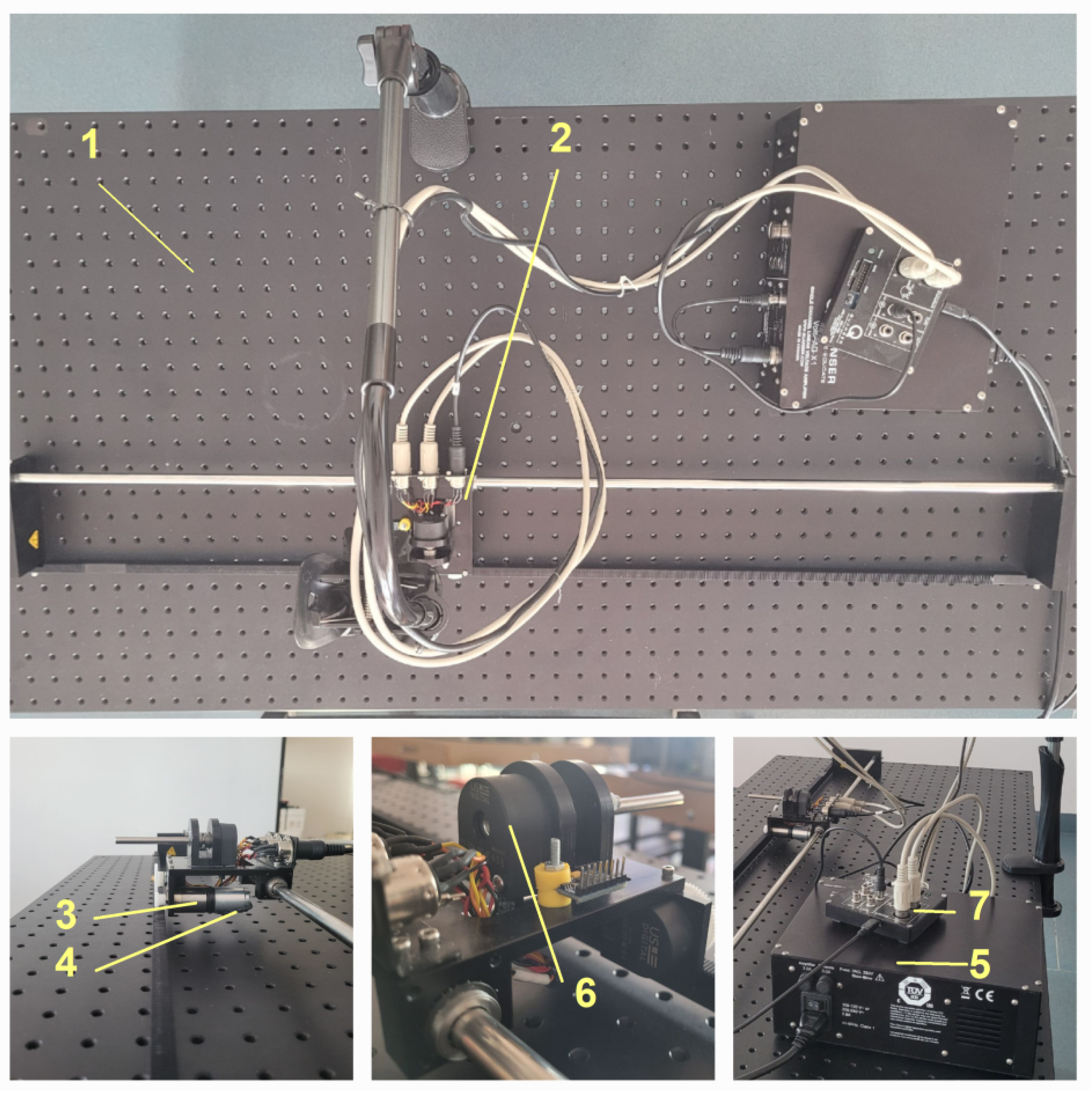
- A fixed steel frame/plate 1200 × 800 mm with mounting holes of Ø16 mm;
- Linear guiding axis 102 cm long, with a 10 × 14 × 9 cm aluminum cart for regular, continuous movement. The cart was driven by a rack and pinion mechanism of Ø6.35 mm and 24 teeth and slid along a stainless steel shaft using linear bearings. The cart weighed 500 g and allowed an extra mass of 370 g, achieving a maximum travel distance of 81.4 cm. Fulfilling the displacement carrying two masses ensures more inertia to absorb the structure’s vibrations.
- A DC servomotor with 4160 rpm and 40 × 103 rad/s² angular acceleration for robust and precise actuation, back-EMF constant of 0.804 mV/rpm, a torque constant of 7.67 × 10−3 Nm/A, and a mechanical time constant of 17 ms.
- A gearbox (23/1 series with 1 stage, 100% efficiency, and 3.71:1 reduction ratio) for decreasing the load on the servomotor;
- A linear voltage-controlled power amplifier for supplying the brush DC micro motor with 6 V. The amplifier was supplied from the electricity grid with 230 V AC, allowing a continuous voltage output of ±24 V and a command of ±10 V.
- A high-resolution optical encoder for precise positioning: 0.0235 mm resolution (4096 counts per revolution in quadrature mode/1024 lines per revolution), tracking to 10,000 rpm. This served as a rotary to digital converter, using phased array detector technology. The position pinion had Ø148 mm and 56 teeth.
- An eight configurable digital inputs/output channels data acquisition board, connected to the encoder, which converts real-time shaft angle, speed, and direction into TTL-compatible quadrature outputs and is controlled through a PID loop in LabView. It had two 5-pin DIN Encoder Input connectors, through which it received 16-bit count values. The initial encoder count can be stated. The encoder can also be configured to reload the initial encoder count on an index pulse.
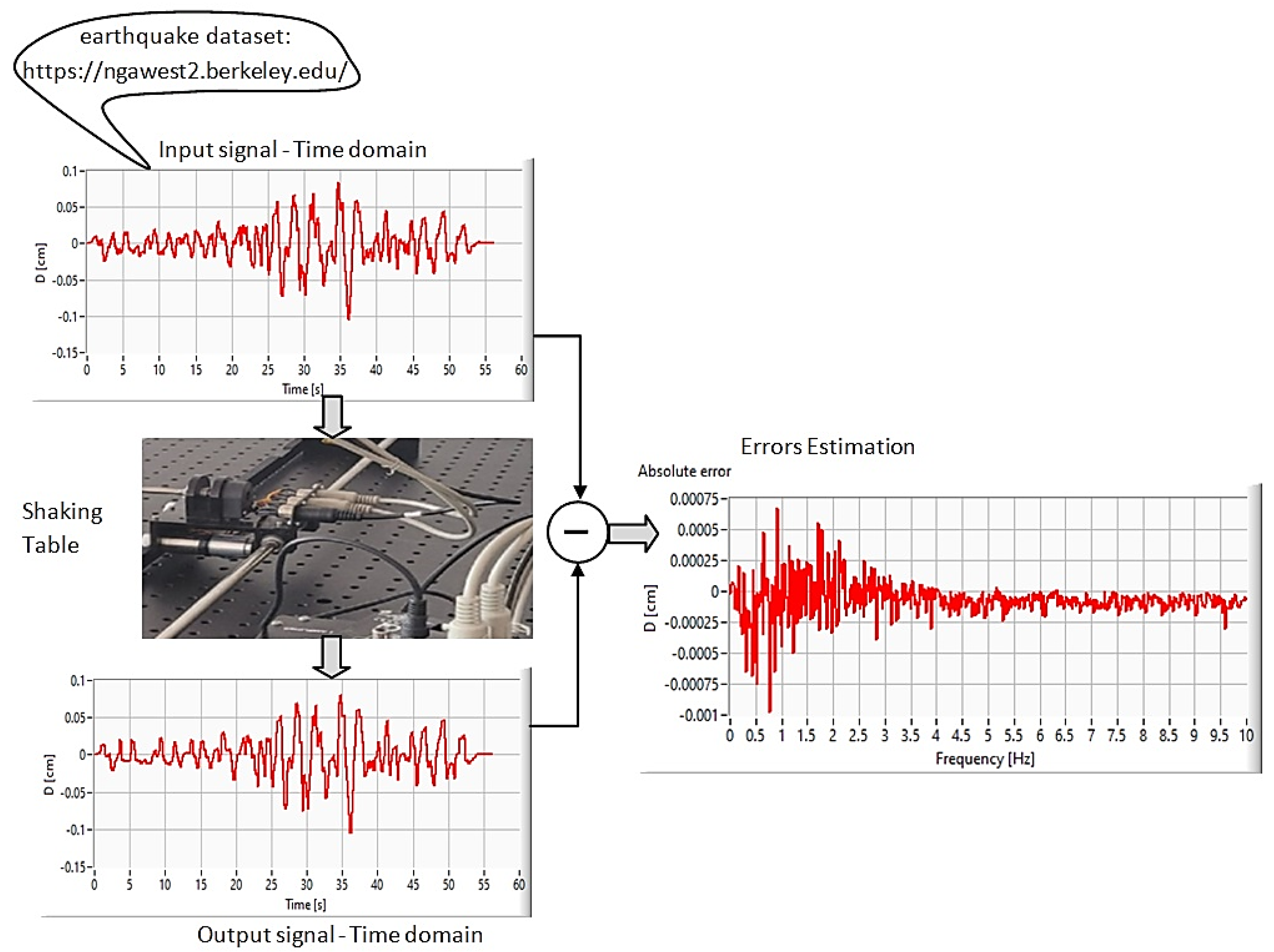
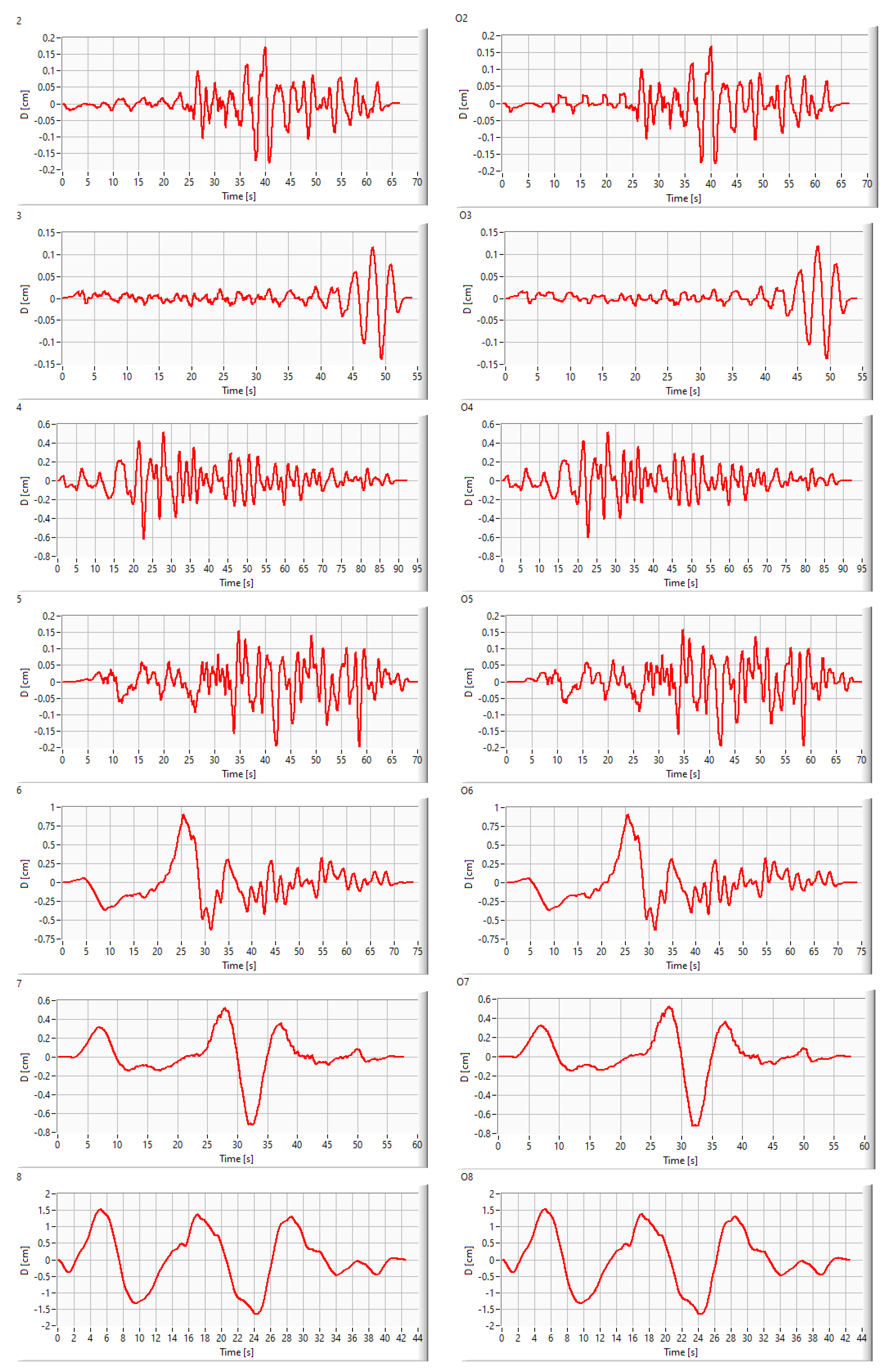
- Selecting the waveform that characterizes a real earthquake. The Pacific Earthquake Engineering Research Center (PEER) ground motion database was accessed, and based on certain selection criteria, such as event name, station name, rupture type, Rjb, and Rup, the earthquake was identified. For each event, the recordings provided the waveforms of acceleration, speed, and displacement in all three propagation directions x, y, and z. To evaluate the magnitude of the earthquake based on the P-wave, we only used the ground displacement wave in the vertical (z) direction.
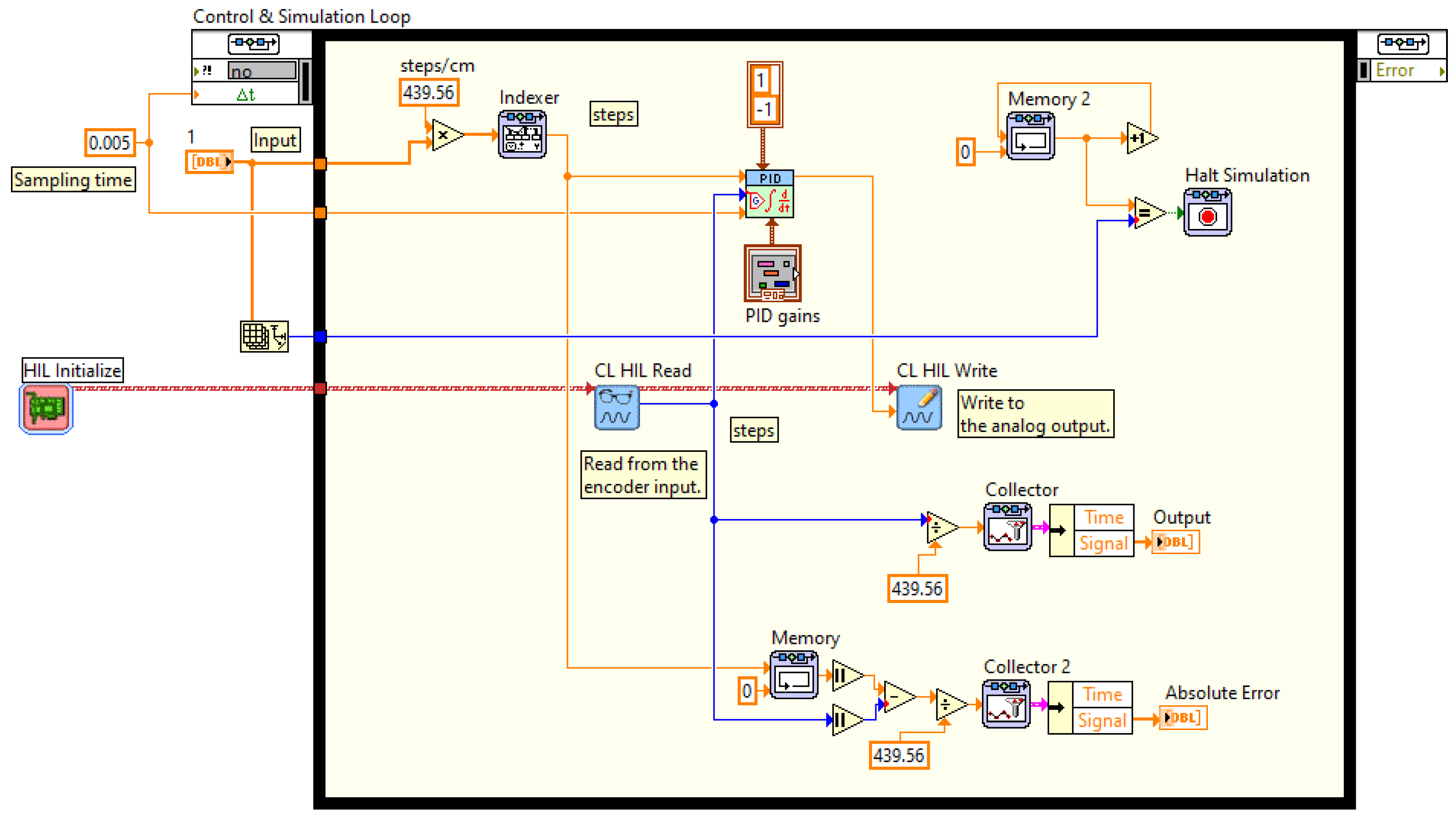
- Applying the command to the vibrating table. The points within the displacement waveform represent the instantaneous positions that the shaking table must reach. Positioning on each position was accomplished by completing a PID displacement control loop. The command was performed by transmitting a continuous voltage level to the DC motor, the voltage level being set by the PID controller based on the reaction. The reaction/feedback came from the displacement encoder.
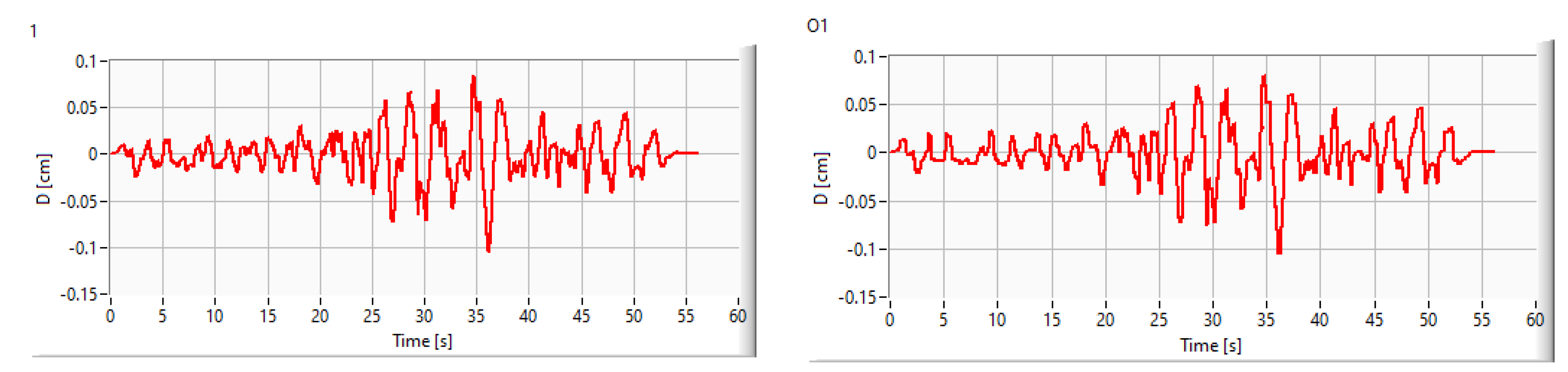
- Processing the output of the vibrating table was represented by the set of instantaneous points of displacement obtained from the encoder. Each value was obtained after completing the PID adjustment cycle.
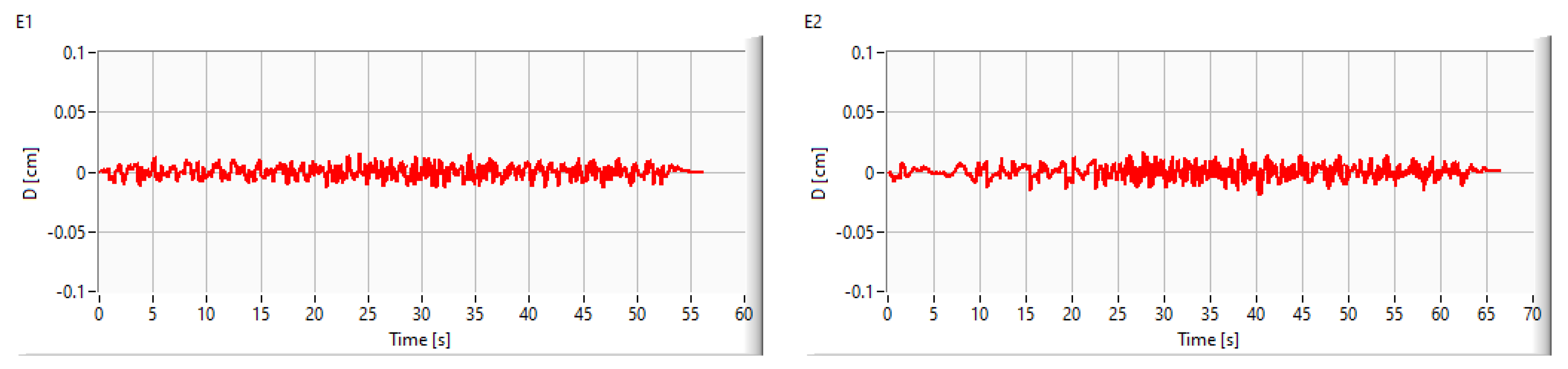
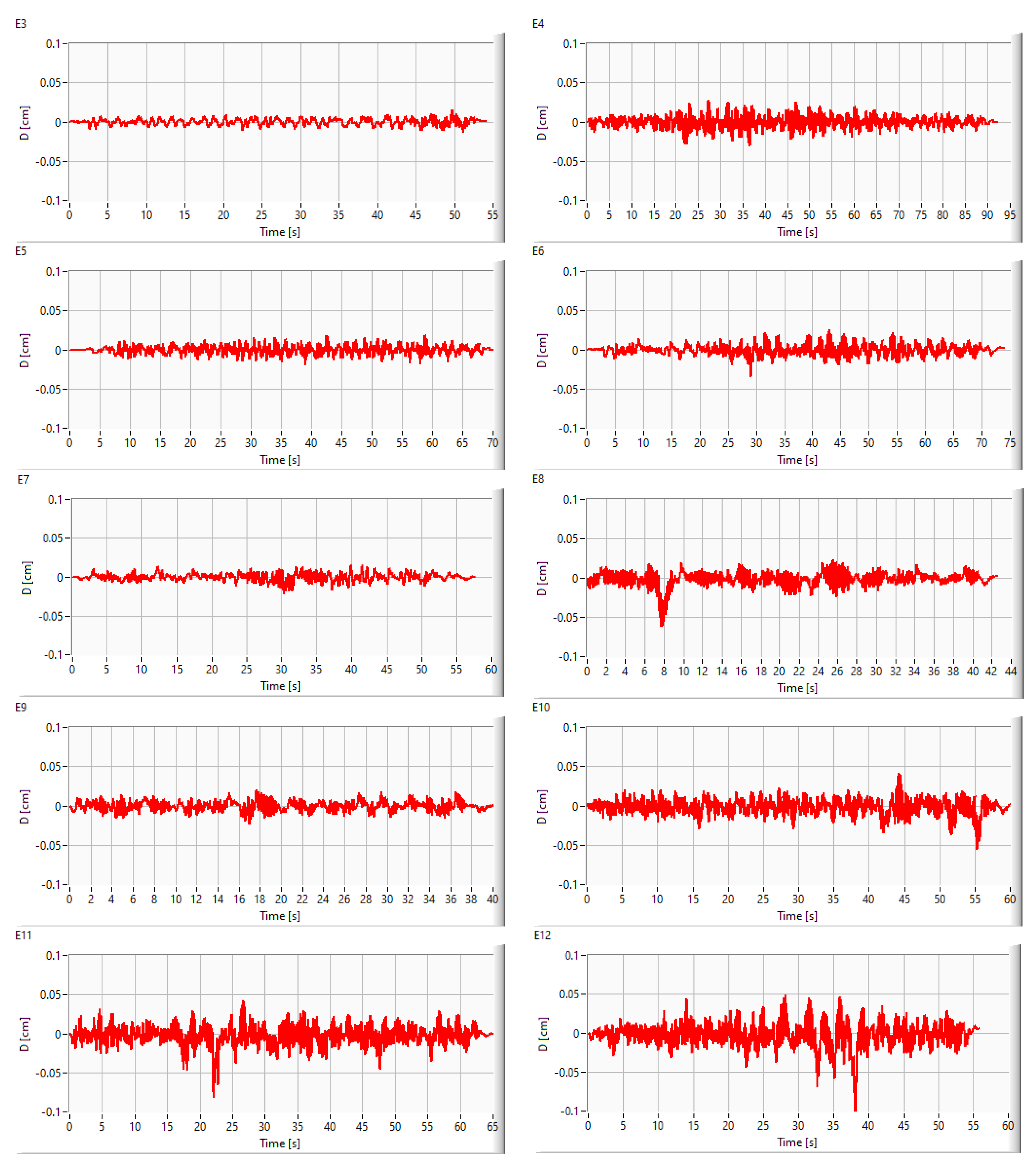
- Assessing the reproduction fidelity of the shaking table. The absolute error of reproduction of the vertical (z) ground displacement waveform was calculated as the difference between the instantaneous value of the waveform points applied to the input (reference) and the points obtained by using the shaking table.
3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ammon, C.J.; Velasco, A.A.; Lay, T.; Wallace, T.C. Foundations of Modern Global Seismology, 2nd ed.; Lawrence, L., Ed.; Academic Press, Elsevier: London, UK, 2020. [Google Scholar] [CrossRef]
- Fayaz, J.; Galasso, C. A deep neural network framework for real-time on-site estimation of acceleration response spectra of seismic ground motions. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 87–103. [Google Scholar] [CrossRef]
- Sollberger, D.; Igel, H.; Schmelzbach, C.; Edme, P.; van Manen, D.-J.; Bernauer, F.; Yuan, S.; Wassermann, J.; Schreiber, U.; Robertsson, J.O.A. Seismological Processing of Six Degree-of-Freedom Ground-Motion Data. Sensors 2020, 20, 6904. [Google Scholar] [CrossRef] [PubMed]
- Williamson, A.; Lux, A.; Allen, R. Improving Out of Network Earthquake Locations Using Prior Seismicity for Use in Earthquake Early Warning. Bull. Seismol. Soc. Am. 2023, 113, 664–675. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C. Earthquake early warning: Recent advances and perspectives. Earth-Sci. Rev. 2020, 205, 103184. [Google Scholar] [CrossRef]
- Chiang, Y.-J.; Chin, T.-L.; Chen, D.-Y. Neural Network-Based Strong Motion Prediction for On-Site Earthquake Early Warning. Sensors 2022, 22, 704. [Google Scholar] [CrossRef]
- Licciardi, A.; Bletery, Q.; Rouet-Leduc, B.; Ampuero, J.P.; Juhel, K. Instantaneous tracking of earthquake growth with elastogravity signals. Nature 2022, 606, 319–324. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Siino, M.; Alessandro, G.; Mineo, R. Long-term monitoring and characterization of soil radon emission in a seismically active area. Geochem. Geophys. Geosyst. 2020, 21, e2020GC009061. [Google Scholar] [CrossRef]
- Acceptance Criteria for Seismic Certification by Shake-Table Testing of Nonstructural Components ac156. Available online: https://icc-es.org/acceptance-criteria/ac156/ (accessed on 30 December 2022).
- Lu, X.; Zou, Y.; Lu, W.; Zhao, B. Shaking table model test on Shanghai World Financial Center Tower. Earthq. Eng. Struct. Dyn. 2007, 36, 439–457. [Google Scholar] [CrossRef]
- Nakashima, M.; Nagae, T.; Enokida, R.; Kajiwara, K. Experiences, accomplishments, lessons, and challenges of E-defense—Tests using world’s largest shaking table. Jpn. Archit. Rev. 2018, 1, 4–17. [Google Scholar] [CrossRef]
- Damcı, E.; Şekerci, Ç. Development of a low-cost single-axis shake table based on Arduino. Exp. Tech. 2019, 43, 179–198. [Google Scholar] [CrossRef]
- Baran, T.; Tanrikulu, A.K.; Dundar, C.; Tanrikulu, A.H. Construction and performance test of a low-cost shake table. Exp. Tech. 2011, 35, 8–16. [Google Scholar] [CrossRef]
- Danish, A.; Ahmad, N.; Salim, M.U. Manufacturing and performance of an economical 1-D shake table. Civ. Eng. J. 2019, 5, 2019–2028. [Google Scholar] [CrossRef]
- Quanser Shake Table II Product Information Sheet. Available online: https://quanserinc.app.box.com/s/fwi5ht5qjy4w34orwe384hbhscsj7zm1 (accessed on 13 January 2023).
- Shao, X.; Enyart, G. Development of a versatile hybrid testing system for seismic experimentation. Exp. Tech. 2014, 38, 44–60. [Google Scholar] [CrossRef]
- Shen, G.; Li, X.; Zhu, Z.; Tang, Y.; Zhu, W.; Liu, S. Acceleration tracking control combining adaptive control and off-line compensators for six-degree-of-freedom electro-hydraulic shaking tables. ISA Trans. 2017, 70, 322–337. [Google Scholar] [CrossRef]
- Enokida, R.; Ikago, K.; Guo, J.; Kajiwara, K. Nonlinear signal-based control for shake table experiments with sliding masses. Earthq. Eng. Struct. Dyn. 2023, 52, 1908–1931. [Google Scholar] [CrossRef]
- Antaki, G.; Gilada, R. Design Basis Loads and Qualification. In Nuclear Power Plant Safety and Mechanical Integrity: Design and Operability of Mechanical Systems, Equipment and Supporting Structures; Antaki, G., Gilada, R., Eds.; Butterworth-Heinemann; Elsevier: Oxford, UK, 2015; p. 30. [Google Scholar] [CrossRef]
- Delgado, P.S.; Arêde, A.; Pouca, N.V.; Costa, A. Numerical Modeling of RC Bridges for Seismic Risk Analysis. In Handbook of Research on Computational Simulation and Modeling in Engineering; Miranda, F., Abreu, C., Eds.; IGI Global: Hershey, PA, USA, 2016; pp. 457–481. [Google Scholar] [CrossRef]
- Rathje, E.M.; Faraj, F.; Russell, S.; Bray, J.D. Empirical Relationships for Frequency Content Parameters of Earthquake Ground Motions. Earthq. Spectra 2004, 20, 119–144. [Google Scholar] [CrossRef]
- Liu, H.; Li, Y.; Zhang, Y.; Chen, Y.; Song, Z.; Wang, Z.; Qian, J. Intelligent tuning method of PID parameters based on iterative learning control for atomic force microscopy. Micron 2018, 104, 26–36. [Google Scholar] [CrossRef]
- Puncello, I.; Caprili, S. Seismic Assessment of Historical Masonry Buildings at Different Scale Levels: A Review. Appl. Sci. 2023, 13, 1941. [Google Scholar] [CrossRef]
- Bektaş, N.; Kegyes-Brassai, O. Development in Fuzzy Logic-Based Rapid Visual Screening Method for Seismic Vulnerability Assessment of Buildings. Geosciences 2023, 13, 6. [Google Scholar] [CrossRef]
- Nievas, C.I.; Bommer, J.J.; Crowley, H.; van Elk, J.; Ntinalexis, M.; Sangirardi, M. A database of damaging small-to-medium magnitude earthquakes. J. Seism. 2020, 24, 263–292. [Google Scholar] [CrossRef]
- Pacific Earthquake Engineering Research Center Ground Motion Database. Available online: https://ngawest2.berkeley.edu/ (accessed on 17 October 2022).
- Khan, I.; Kwon, Y.-W. P-Detector: Real-Time P-Wave Detection in a Seismic Waveform Recorded on a Low-Cost MEMS Accelerometer Using Deep Learning. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Christie, D.; Neill, S.P. Measuring and Observing the Ocean Renewable Energy Resource. In Comprehensive Renewable Energy, 2nd ed.; Letcher, T.M., Ed.; Elsevier: Amsterdam, The Netherlands, 2022; pp. 149–175. ISBN 9780128197349. [Google Scholar] [CrossRef]
- Otto, S.A.; Kadin, M.; Casini, M.; Torres, M.A.; Blenckner, T. A quantitative framework for selecting and validating food web indicators. Ecol. Indic. 2018, 84, 619–631. [Google Scholar] [CrossRef]
- Peng, C.; Jiang, P.; Ma, Q.; Wu, P.; Su, J.; Zheng, Y.; Yang, J. Performance evaluation of an earthquake early warning system in the 2019–2020 M 6.0 Changning, Sichuan, China, Seismic Sequence. Front. Earth Sci. 2021, 9, 699941. [Google Scholar] [CrossRef]
- Zhu, J.; Li, S.; Song, J.; Wang, Y. Magnitude estimation for earthquake early warning using a deep convolutional neural network. Front. Earth Sci. 2021, 9, 653226. [Google Scholar] [CrossRef]
- Zhou, T.; Meng, L.; Zhang, A.; Ampuero, J.P. Seismic Waveform-Coherence Controlled by Earthquake Source Dimensions. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023458. [Google Scholar] [CrossRef]
- Xiao, Y.; Pan, X.; Yang, T.T. Nonlinear backstepping hierarchical control of shake table using high-gain observer. Earthq. Eng. Struct. Dyn. 2022, 51, 3347–3366. [Google Scholar] [CrossRef]
- Huang, B.; Günay, S.; Lu, W. Seismic assessment of freestanding ceramic vase with shaking table testing and performance-based earthquake engineering. J. Earthq. Eng. 2022, 26, 7956–7978. [Google Scholar] [CrossRef]
- Ozcelik, O.; Conte, J.P.; Luco, J.E. Comprehensive mechanics-based virtual model of NHERI@ UCSD shake table—Uniaxial configuration and bare table condition. Earthq. Eng. Struct. Dyn. 2021, 50, 3288–3310. [Google Scholar] [CrossRef]
- Damerji, H.; Yadav, S.; Sieffert, Y. Design of a Shake Table with Moderate Cost. Exp. Tech. 2022, 46, 365–383. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event | Year | Station | Magnitude (MW) | Mechanism | Rjb (km) | Rrup (km) | Vs30 (m/s) | D5-75 (s) | D5-95 (s) | Arias Intensity (m/s) | Sampling Period (s) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Chi-Chi, Taiwan-02 | 1999 | CHY065 | 5.9 | Reverse | 125.26 | 125.89 | 250.0 | 16.6 | 27.3 | 0.0 | 0.005 |
| Chi-Chi, Taiwan-02 | 1999 | CHY067 | 5.9 | Reverse | 126.39 | 126.56 | 227.97 | 15.3 | 25.8 | 0.0 | 0.004 |
| Chi-Chi, Taiwan-02 | 1999 | CHY071 | 5.9 | Reverse | 122.02 | 122.19 | 202.95 | 13.0 | 27.1 | 0.0 | 0.005 |
| Parkfield-02, CA | 2004 | Hollister-Airport Bldg #3 | 6.0 | Strike slip | 121.51 | 121.54 | 288.67 | 38.7 | 57.0 | 0.0 | 0.005 |
| Parkfield-02, CA | 2004 | Salinas-County Hospital Gnds | 6.0 | Strike slip | 120.74 | 120.79 | 315.31 | 21.9 | 33.6 | 0.0 | 0.005 |
| Chi-Chi, Taiwan-03 | 1999 | ILA006 | 6.2 | Reverse | 129.11 | 129.4 | 279.41 | 18.3 | 30.6 | 0.0 | 0.004 |
| Chi-Chi, Taiwan-03 | 1999 | ILA007 | 6.2 | Reverse | 127.25 | 127.54 | 496.27 | 20.6 | 28.1 | 0.0 | 0.004 |
| San Fernando | 1971 | Isabella Dam (Aux Abut) | 6.61 | Reverse | 130.0 | 130.98 | 591.0 | 20.2 | 26.5 | 0.0 | 0.005 |
| San Fernando | 1971 | Bakersfield-Harvey Aud | 6.61 | Reverse | 111.88 | 113.02 | 241.41 | 24.1 | 35.3 | 0.0 | 0.005 |
| El Alamo | 1956 | El Centro Array #9 | 6.8 | Strike slip | 121.0 | 121.7 | 213.44 | 23.0 | 40.9 | 0.1 | 0.005 |
| Hector Mine | 1999 | Bombay Beach Fire Station | 7.13 | Strike slip | 120.69 | 120.69 | 257.03 | 27.0 | 41.6 | 0.1 | 0.005 |
| Landers | 1992 | Covina-W Badillo | 7.28 | Strike slip | 128.06 | 128.06 | 324.79 | 20.0 | 27.6 | 0.1 | 0.005 |
| No | Name | Min (Input) (cm) | Max (Input) (cm) | Max–Min (Input) (cm) | Root Mean Square Error (RMSE) (cm) | Normalized Root Mean Square Error (NRMSE) (%) |
|---|---|---|---|---|---|---|
| 1 | Chi-Chi, Taiwan-02 | −0.104 | 0.083 | 0.188 | 0.0046 | 2.48 |
| 2 | Chi-Chi, Taiwan-02 | −0.179 | 0.172 | 0.352 | 0.0049 | 1.41 |
| 3 | Chi-Chi, Taiwan-02 | −0.138 | 0.115 | 0.254 | 0.0037 | 1.45 |
| 4 | Parkfield-02, CA | −0.613 | 0.514 | 1.128 | 0.0064 | 0.57 |
| 5 | Parkfield-02, CA | −0.197 | 0.155 | 0.353 | 0.0049 | 1.39 |
| 6 | Chi-Chi, Taiwan-03 | −0.632 | 0.903 | 1.535 | 0.0060 | 0.39 |
| 7 | Chi-Chi, Taiwan-03 | −0.720 | 0.522 | 1.242 | 0.0045 | 0.36 |
| 8 | San Fernando | −1.660 | 1.528 | 3.189 | 0.0087 | 0.27 |
| 9 | San Fernando | −1.002 | 0.764 | 1.766 | 0.0055 | 0.31 |
| 10 | El Alamo | −0.743 | 1.096 | 1.839 | 0.0093 | 0.51 |
| 11 | Hector Mine | −2.592 | 1.931 | 4.524 | 0.0117 | 0.26 |
| 12 | Lander | −2.099 | 2.606 | 4.705 | 0.0147 | 0.31 |
| Xiao et al. Model | Proposed Model | |||||
|---|---|---|---|---|---|---|
| Seismic Input | RSN 6-El Centro Array #9, 6.95 MW | El Centro Array #9, 6.8 MW | ||||
| Shaking table control method | ABHC | ABHCO | DBHC | DBHO | PID | PID |
| NRMSE (%) | 1.06 | 0.73 | 1.12 | 1.03 | 0.86 | 0.51 |
| Seismic Input | RSN 79-Palmdale Fire Station, 6.61 MW | Bakersfield-Harvey Aud, 6.61 MW | ||||
| Shaking table control method | ABHC | ABHCO | DBHC | DBHO | PID | PID |
| NRMSE (%) | 2.10 | 1.48 | 2.17 | 2.04 | 1.54 | 0.27 |
| Seismic Input | RSN 755-Coyote Lake Dam (SW Abut), 6.93 MW | El Centro Array #9, 6.8 MW | ||||
| Shaking table control method | ABHC | ABHCO | DBHC | DBHO | PID | PID |
| NRMSE (%) | 1.01 | 0.7 | 1.07 | 0.98 | 0.84 | 0.51 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serea, E.; Donciu, C. Shaking Table Design for Testing Earthquake Early Warning Systems. Designs 2023, 7, 72. https://doi.org/10.3390/designs7030072
Serea E, Donciu C. Shaking Table Design for Testing Earthquake Early Warning Systems. Designs. 2023; 7(3):72. https://doi.org/10.3390/designs7030072
Chicago/Turabian StyleSerea, Elena, and Codrin Donciu. 2023. "Shaking Table Design for Testing Earthquake Early Warning Systems" Designs 7, no. 3: 72. https://doi.org/10.3390/designs7030072