
Knee Angle Generation with Walking Speed Adaptation Ability for a Powered Transfemoral Prosthetic Leg Prototype


 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
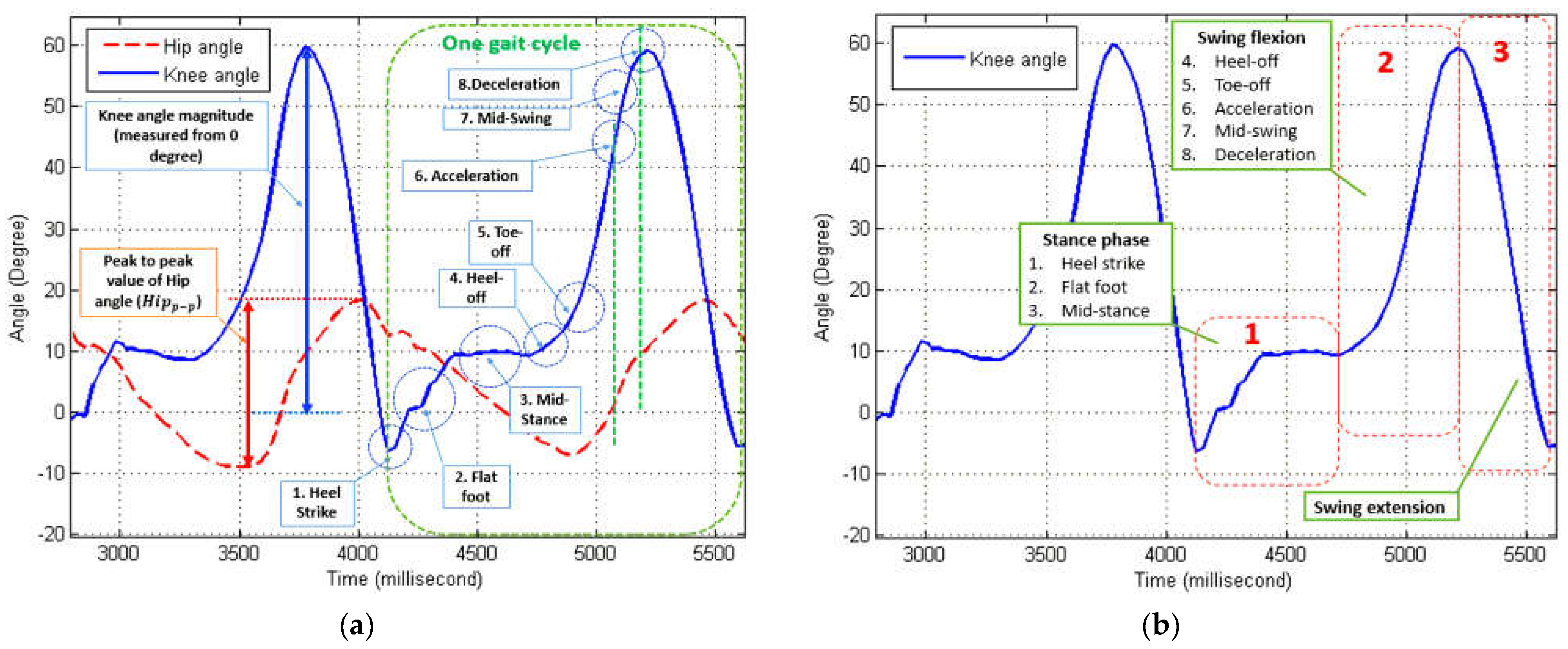
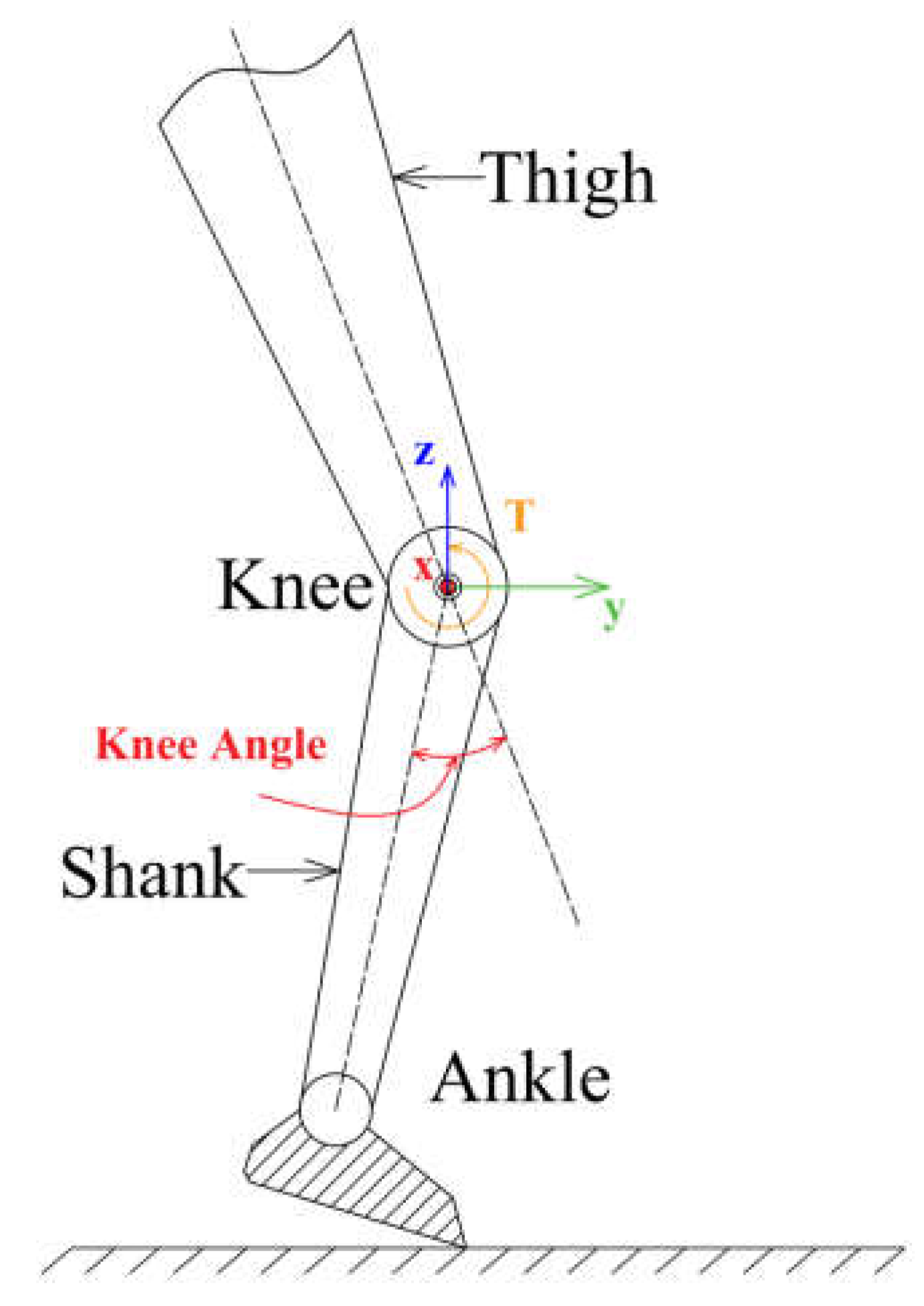
2.1. Characteristics of Knee and Hip Angles
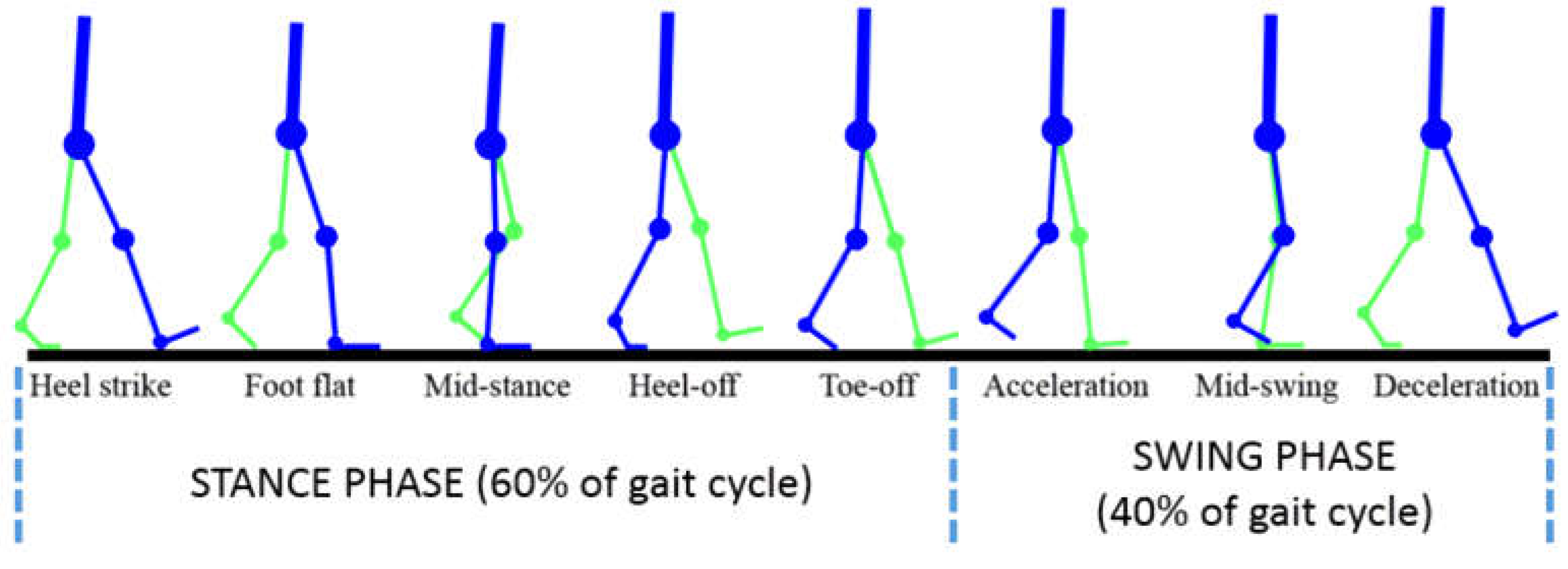
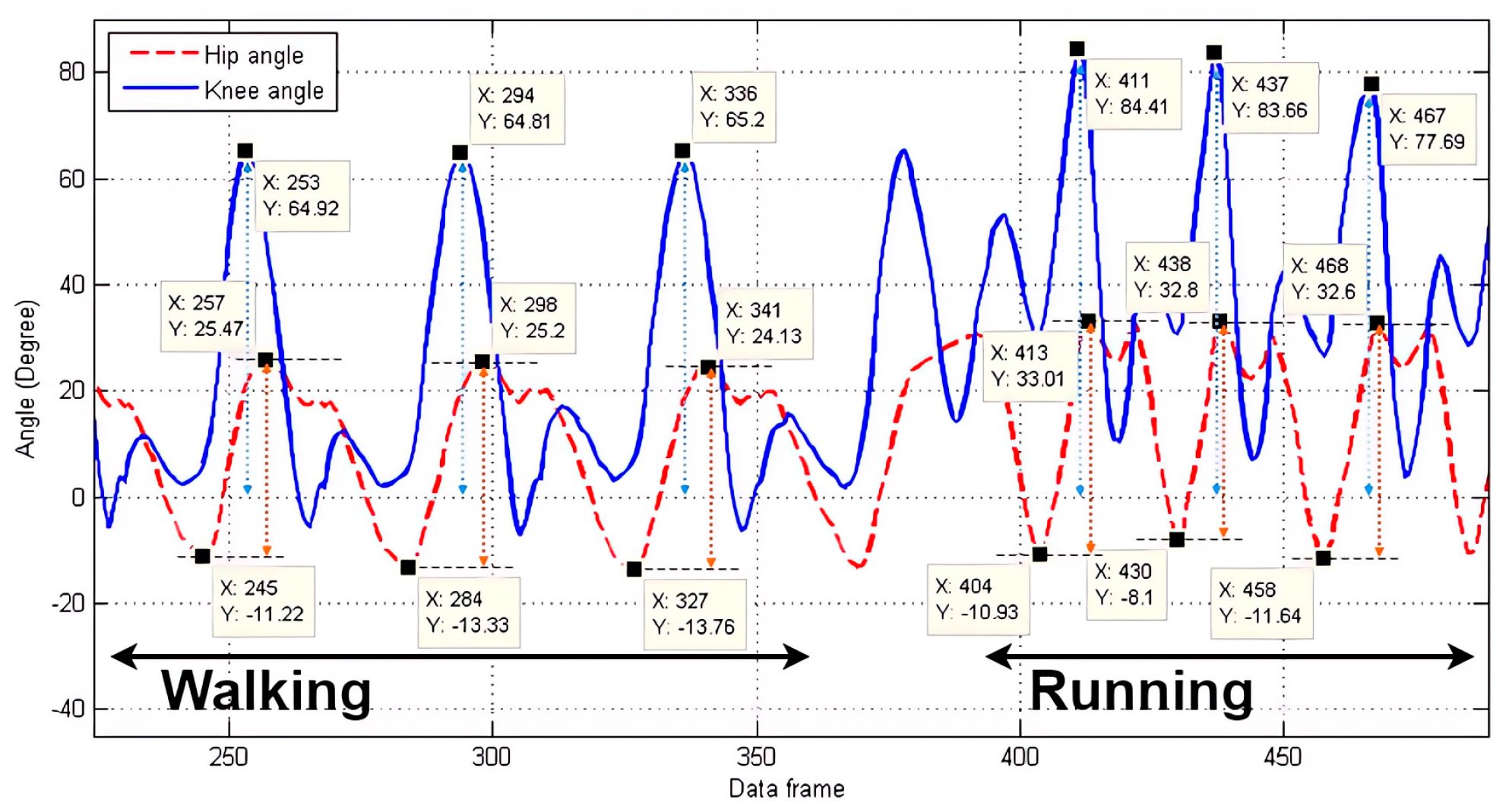
2.1.1. Knee Angle Characteristics of Normal Walking
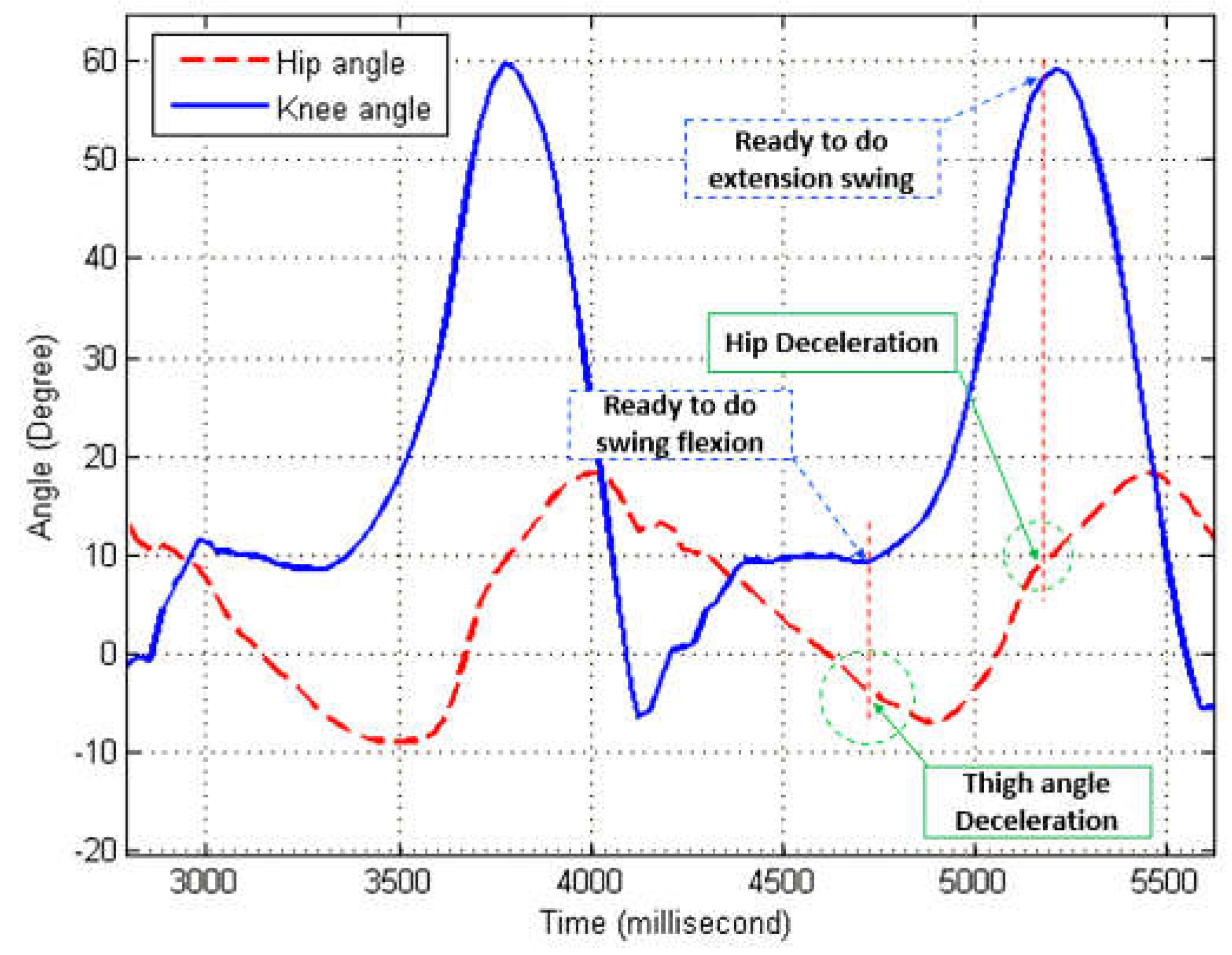
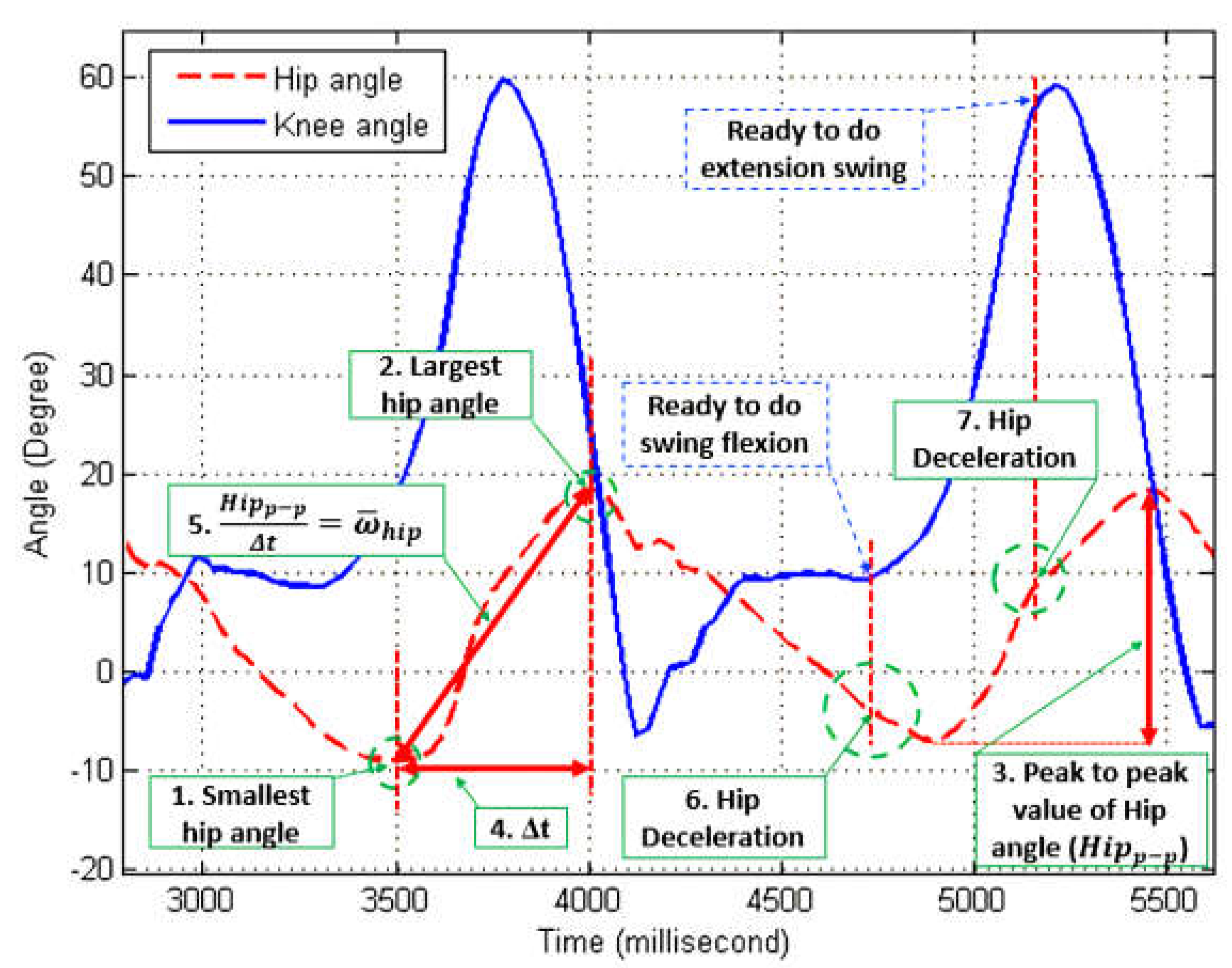
2.1.2. Hip Angle Features According to Walking Phases
- 1.
- Smallest hip angle;
- 2.
- Largest hip angle;
- 3.
- The peak-to-peak value of the hip angle ();
- 4.
- Gait period ();
- 5.
- Average angular velocity of the hip swing ();
- 6.
- The starting point of deceleration in the backward direction;
- 7.
- The starting point of deceleration in the forward direction.
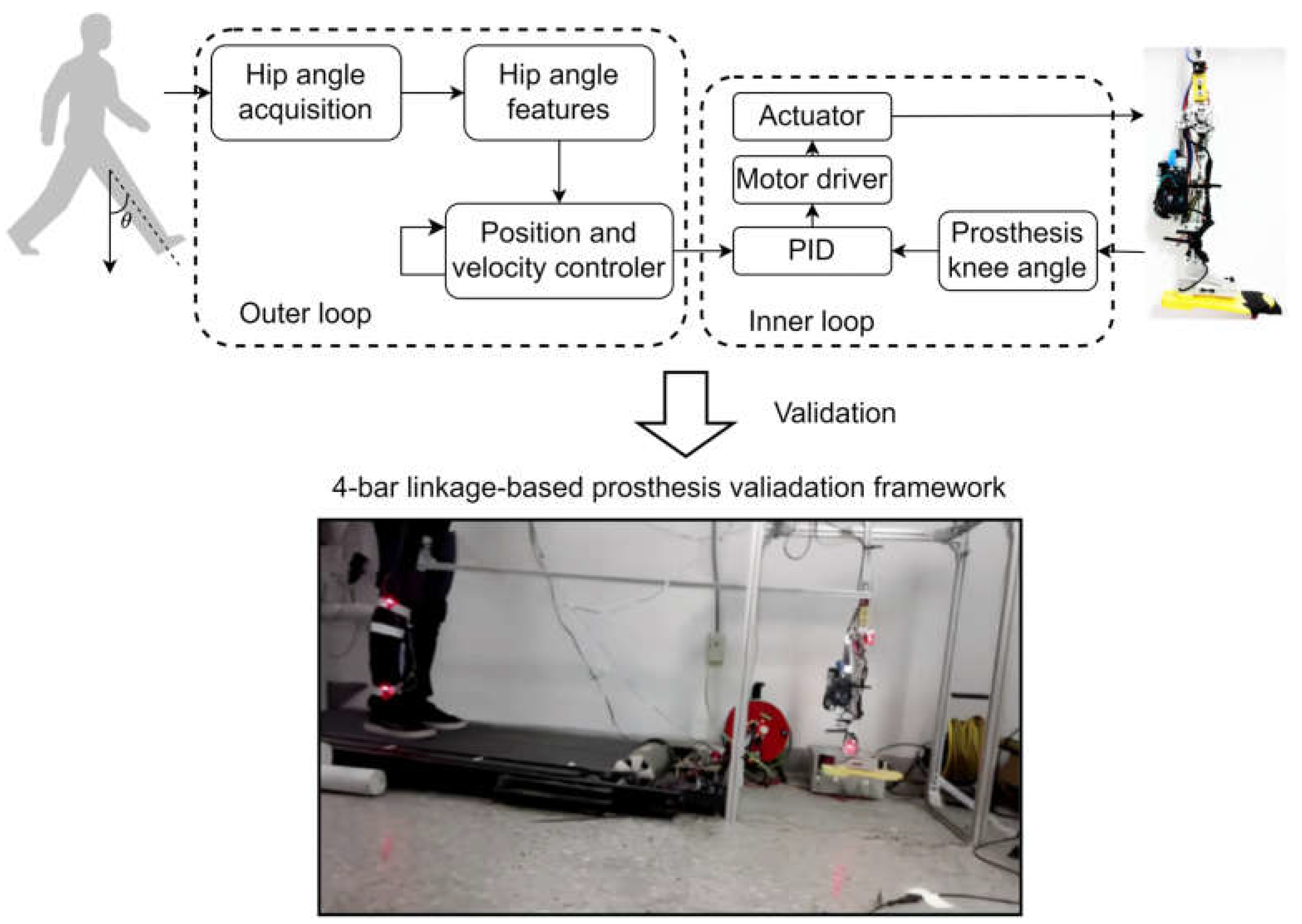
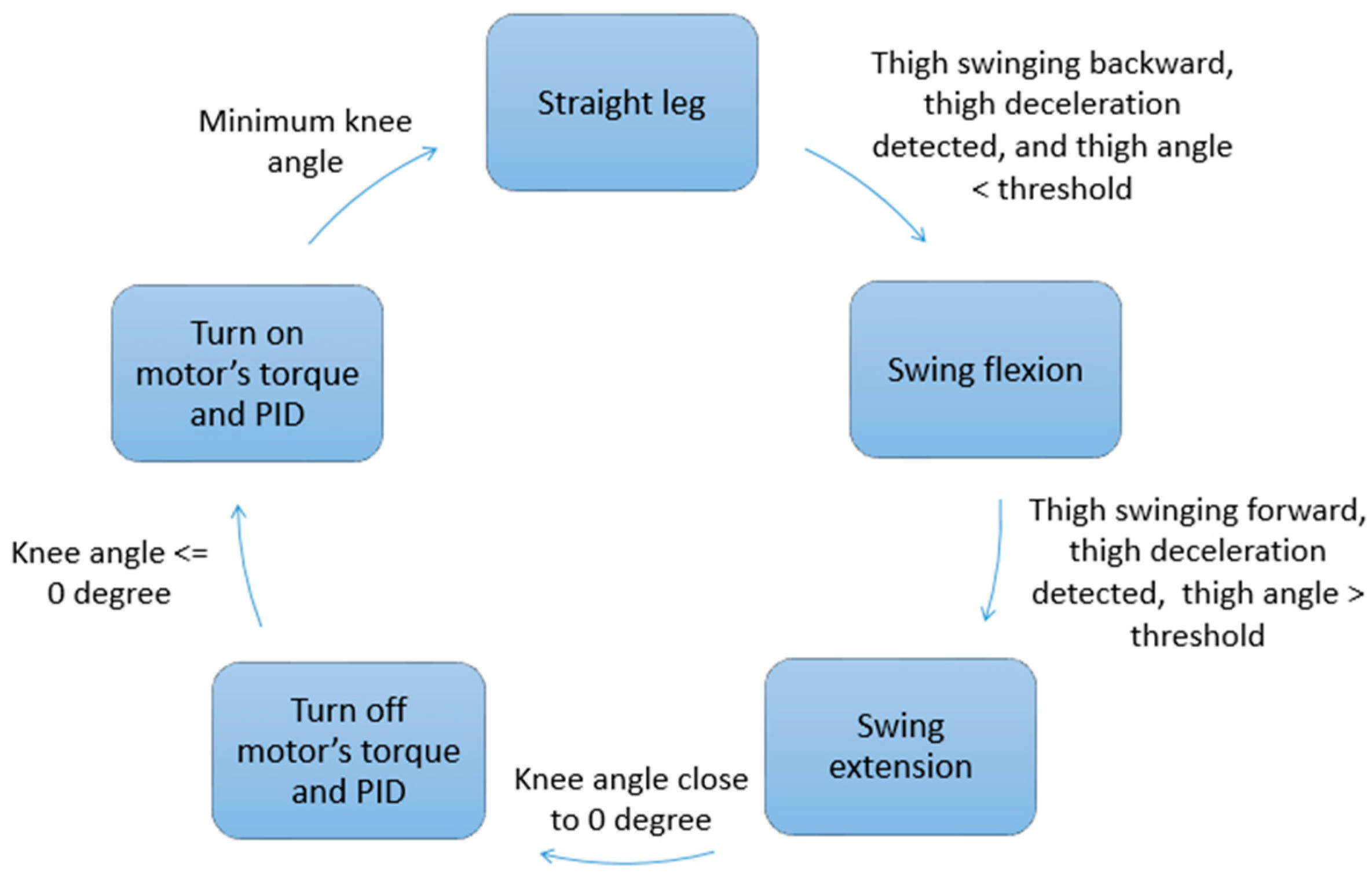
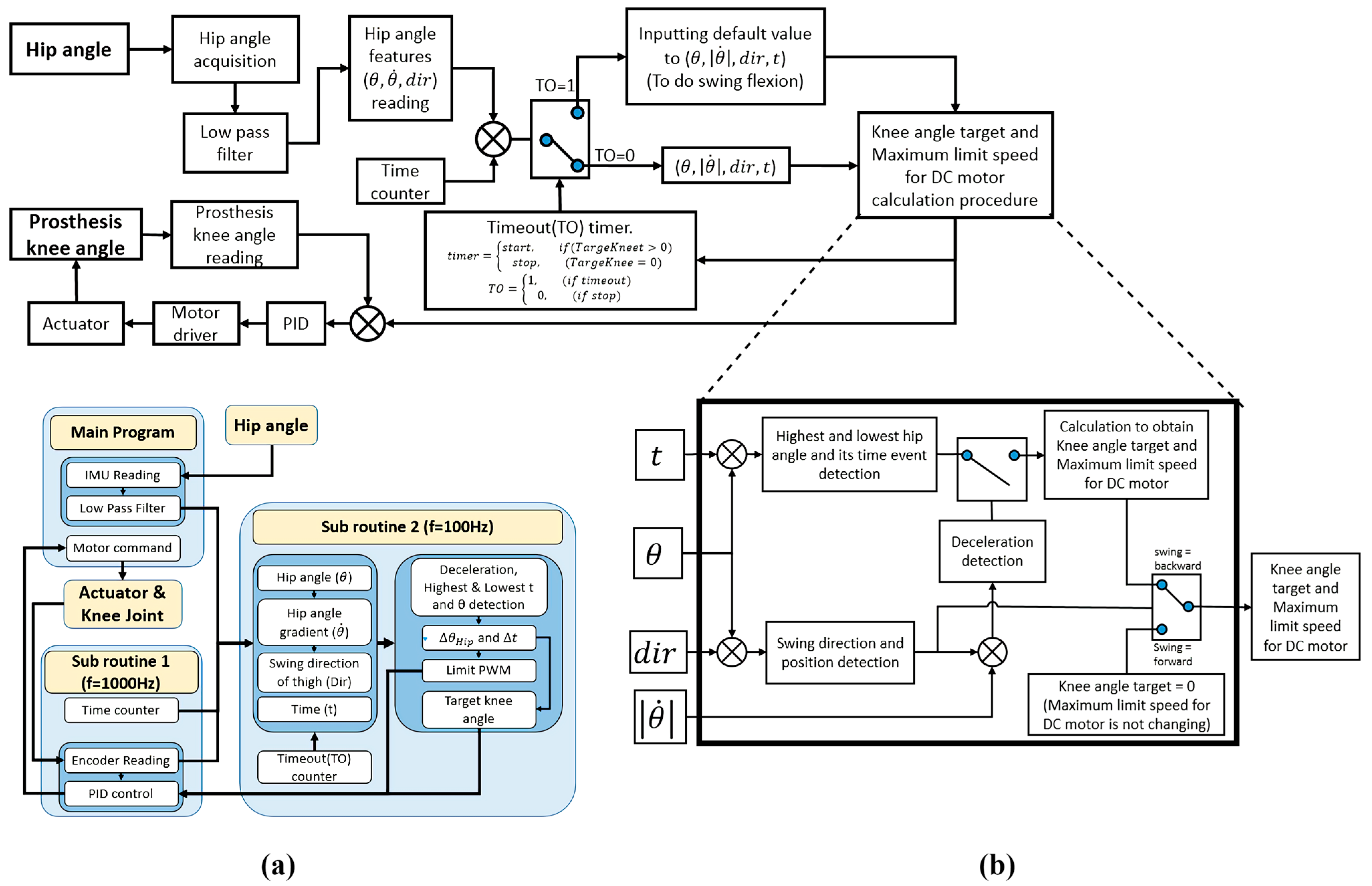
2.2. Knee Angle Generation and Prosthetic Control
2.2.1. Knee Angle Amplitude and Actuator Speed Limit
2.2.2. Whole Process Integration
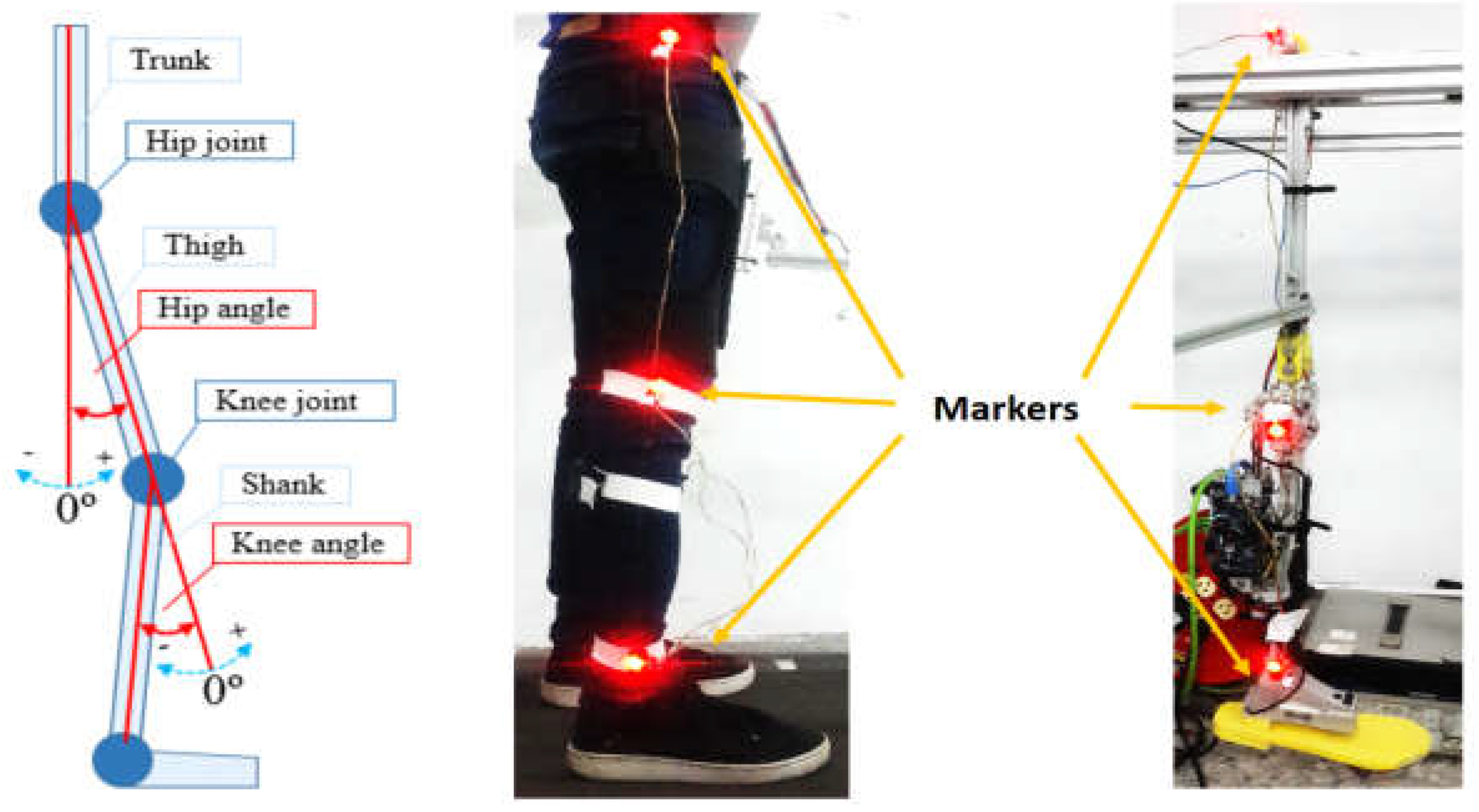
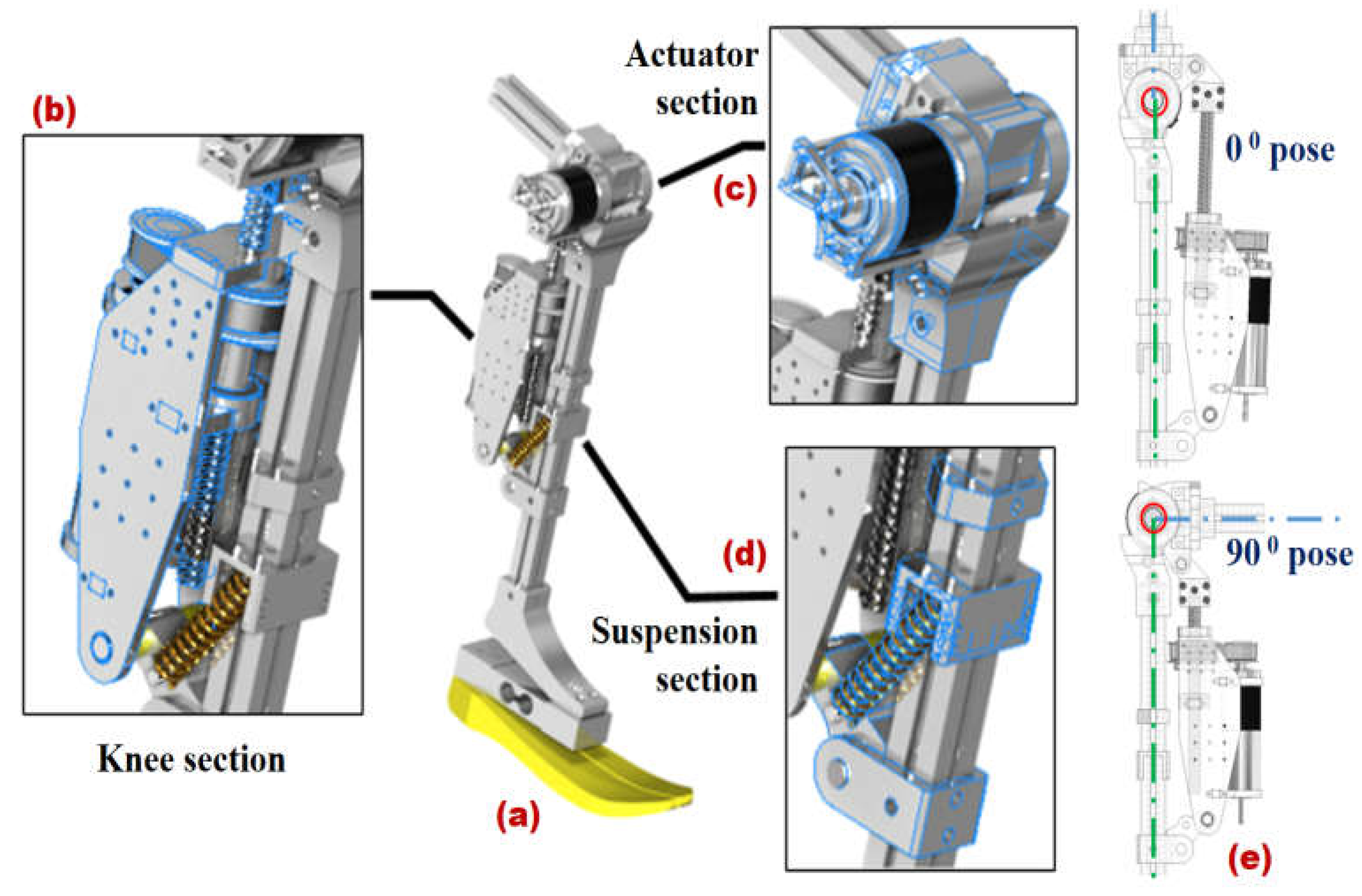
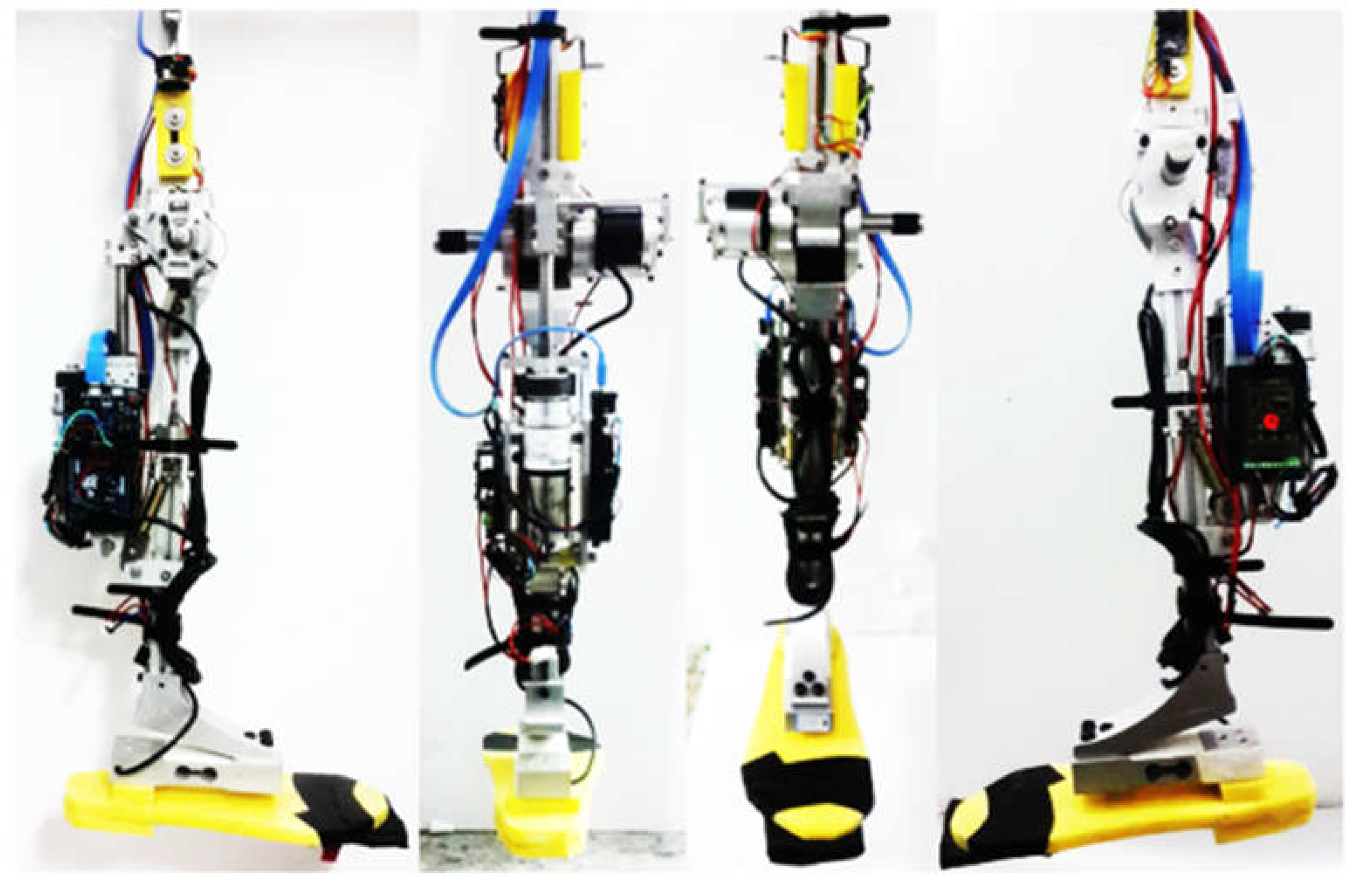
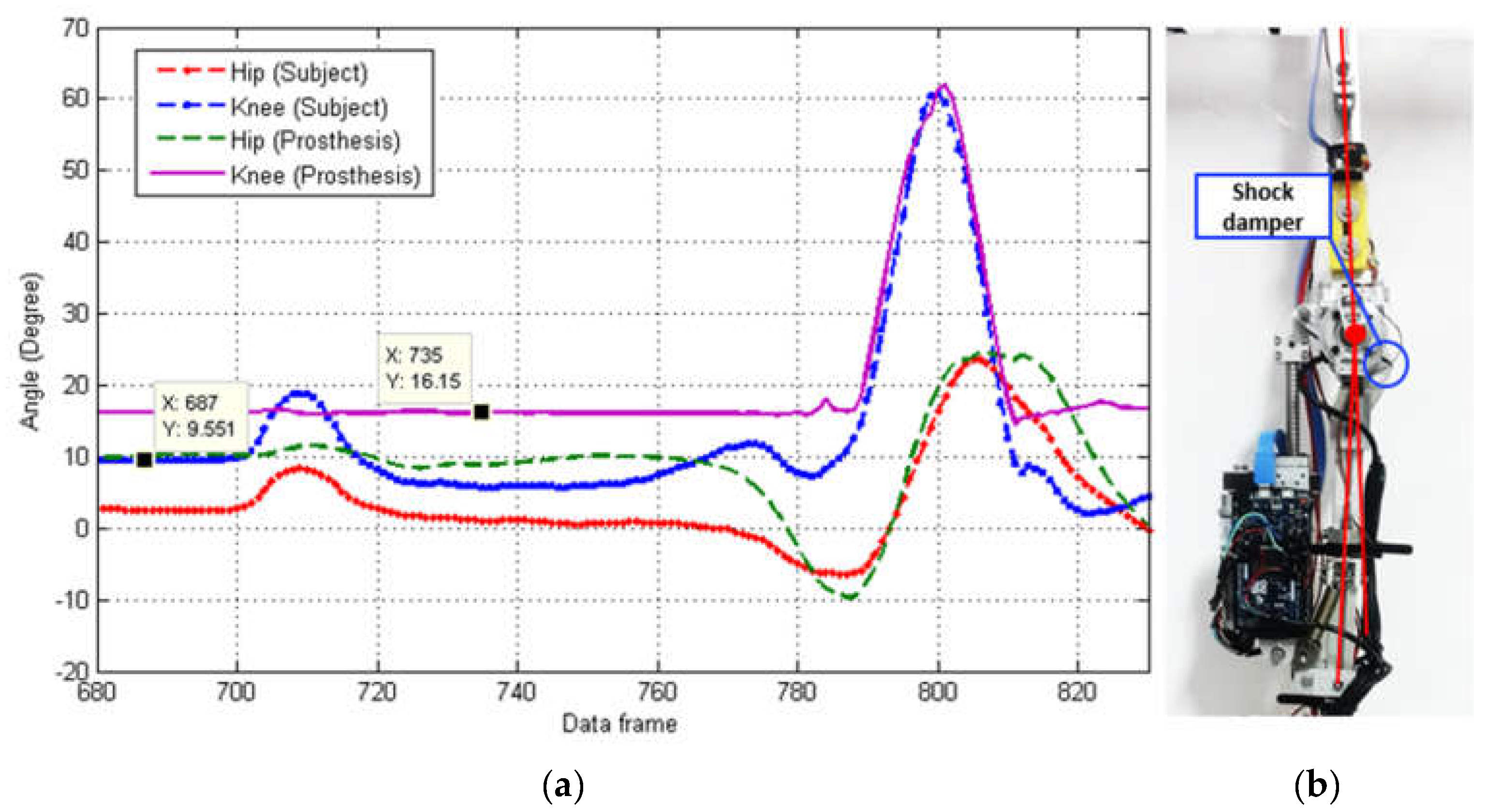
2.2.3. Design of the Prosthetic Leg Prototype
3. Results and Discussion
3.1. Experimental Setup
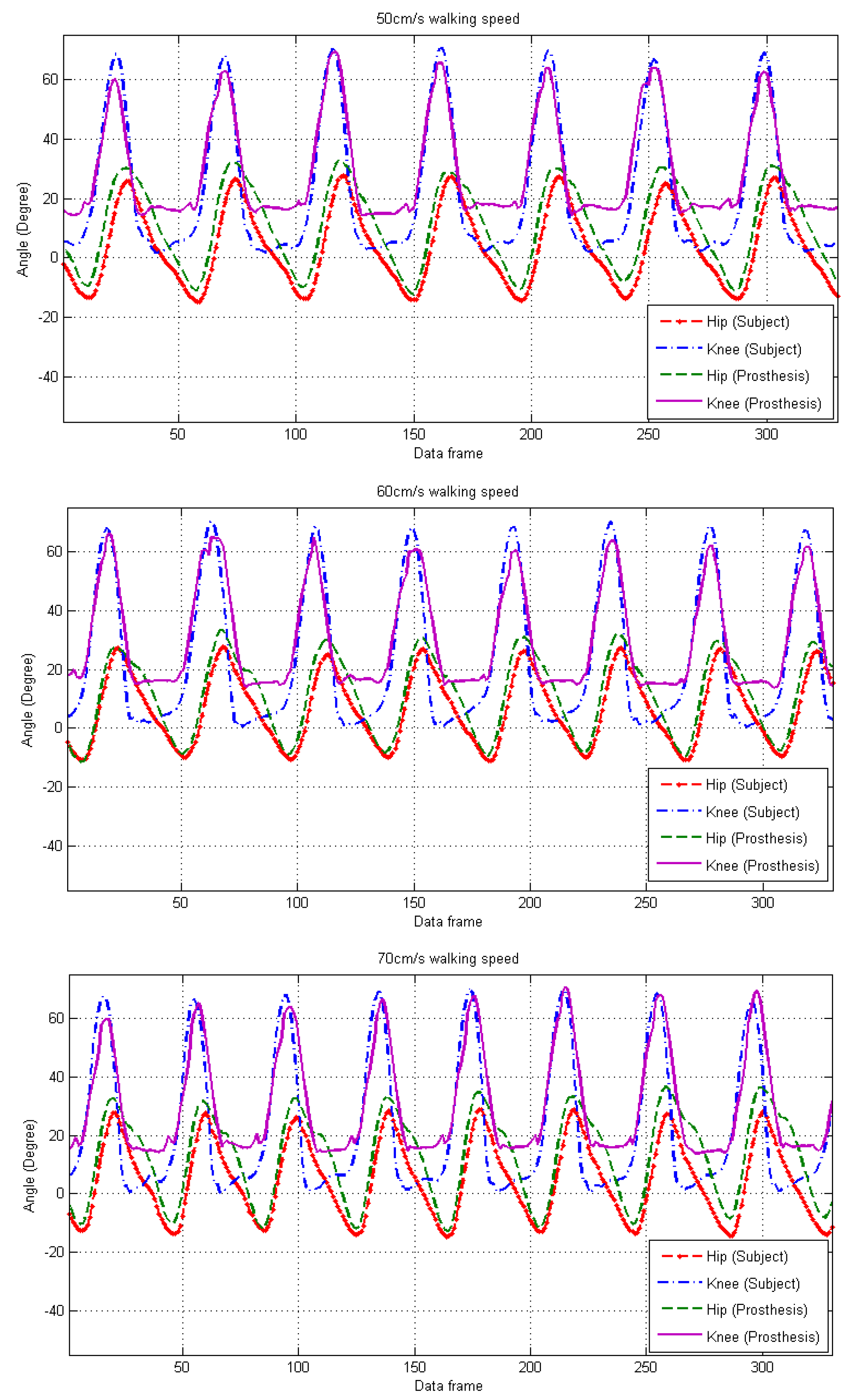
3.2. Experimental Results without Using a Bypass Adapter
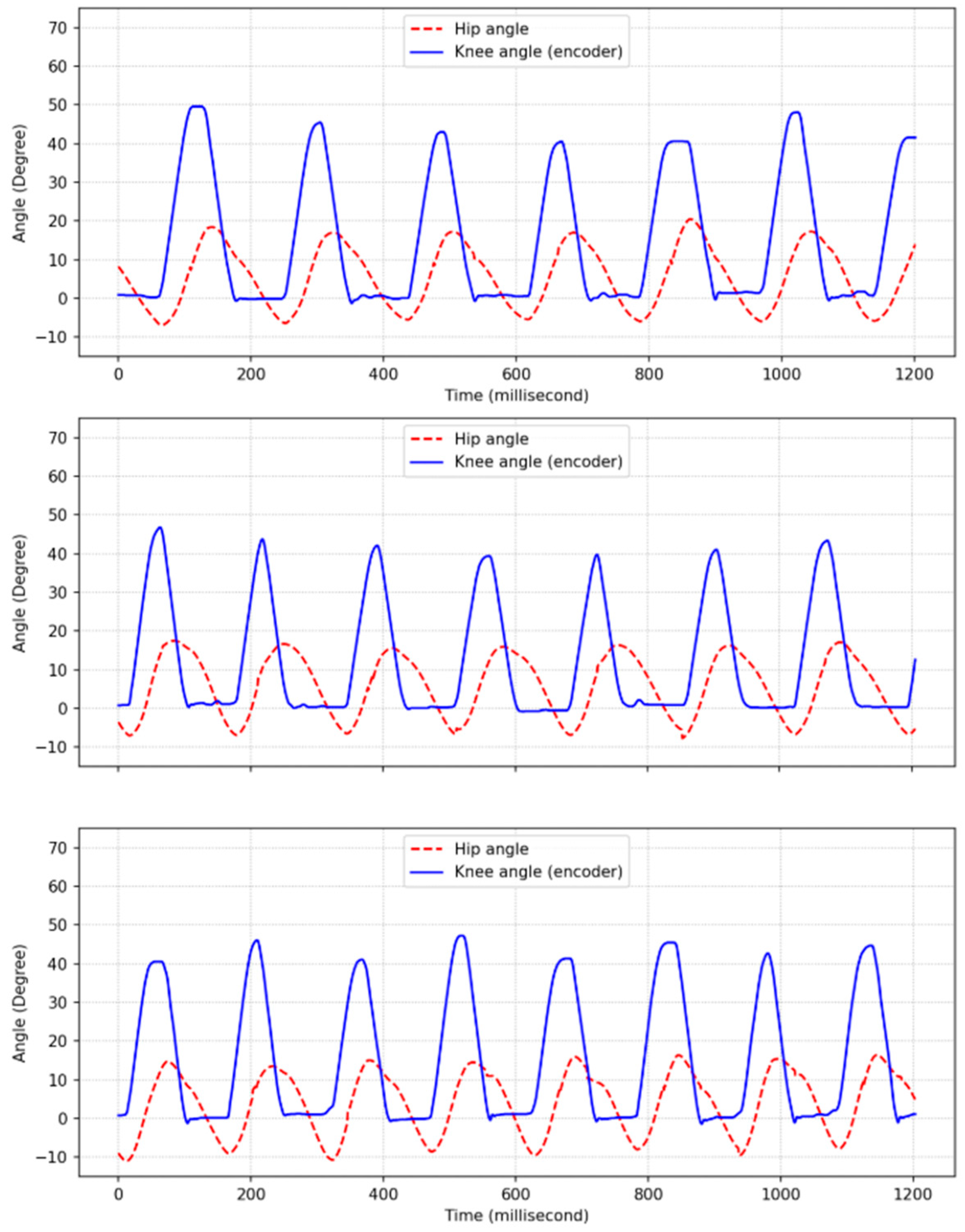
3.3. Treadmill and Real-Taking Experiment Using a Bypass Adapter
4. Discussion
4.1. Discussion of Experiment with Four-Bar Linkage Mechanism
4.2. Discussion of RMSE Investigations on Knee Actuator Speed Limitation and the Initial Knee Angle Offset
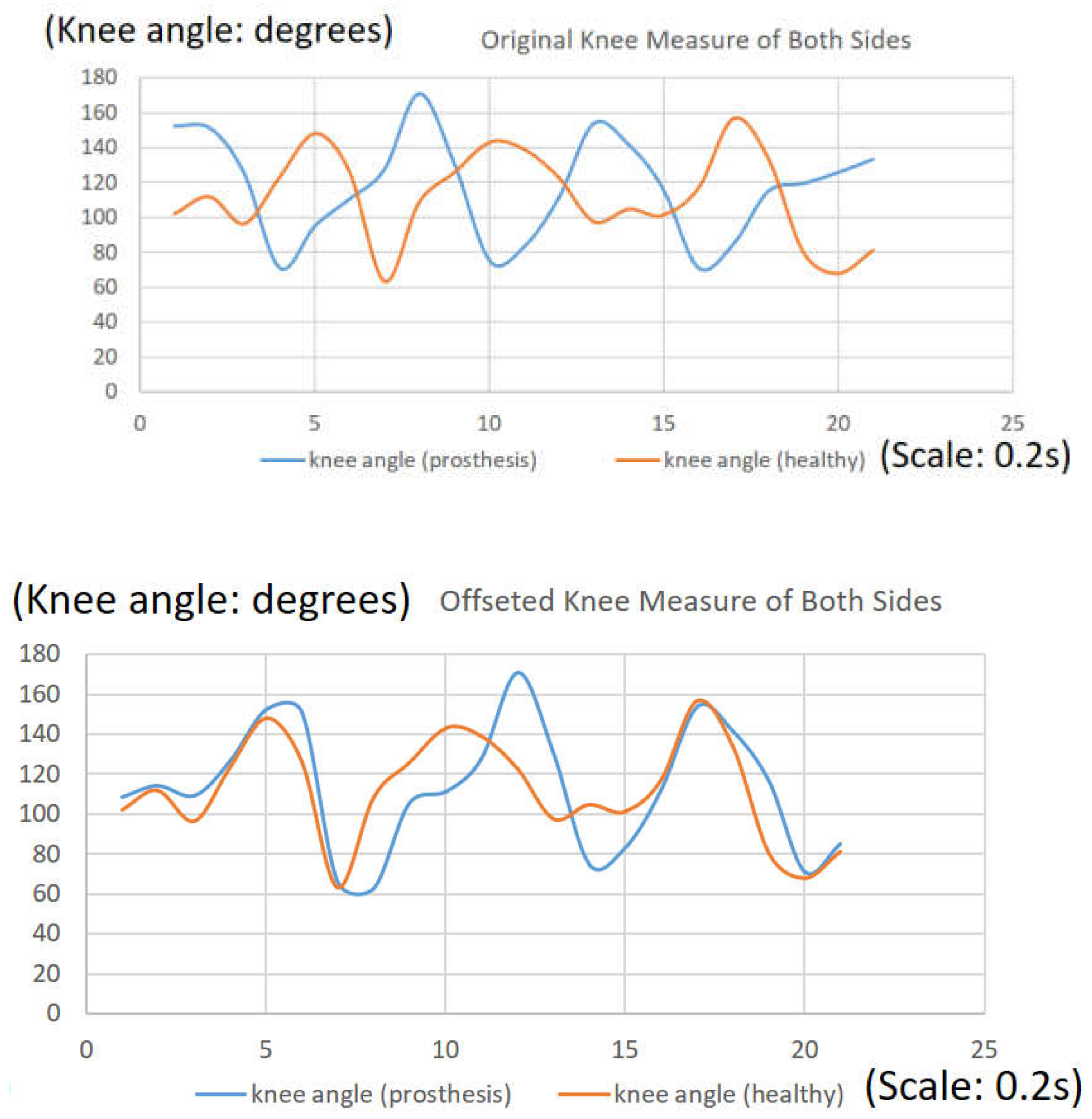
4.3. Discussion of Experiment with Using a Bypass Adapter
4.4. Limitation and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, W.T.; Russell, K.; Sodhi, R.S. On Transfemoral Prosthetic Knee Design for Natural Human Knee Motion. Recent Pat. Mech. Eng. 2020, 13, 49–59. [Google Scholar] [CrossRef]
- Au, S.K.; Weber, J.; Herr, H. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy. IEEE Trans. Robot. 2009, 25, 51–66. [Google Scholar] [CrossRef]
- Gregg, R.D.; Lenzi, T.; Hargrove, L.J.; Sensinger, J.W. Virtual Constraint Control of a Powered Prosthetic Leg: From Simulation to Experiments with Transfemoral Amputees. IEEE Trans. Robot. 2014, 30, 1455–1471. [Google Scholar] [CrossRef] [PubMed]
- Fluit, R.; Prinsen, E.C.; Wang, S.; van der Kooij, H. A Comparison of Control Strategies in Commercial and Research Knee Prostheses. IEEE Trans. Biomed. Eng. 2020, 67, 277–290. [Google Scholar] [CrossRef] [PubMed]
- Yu, T.; Plummer, A.R.; Iravani, P.; Bhatti, J.; Zahedi, S.; Moser, D. The Design, Control, and Testing of an Integrated Electrohydrostatic Powered Ankle Prosthesis. IEEE/ASME Trans. Mechatron. 2019, 24, 1011–1022. [Google Scholar] [CrossRef]
- Zhu, J.; Jiao, C.; Dominguez, I.; Yu, S.; Su, H. Design and Back-drivability Modeling of a Portable High Torque Robotic Knee Prosthesis with Intrinsic Compliance for Agile Activities. IEEE/ASME Trans. Mechatron. 2022, 27, 1837–1845. [Google Scholar] [CrossRef] [PubMed]
- Rouse, E.J.; Mooney, L.M.; Herr, H.M. Clutchable Series-elastic Actuator: Implications for Prosthetic Knee Design. Int. J. Robot. Res. 2014, 33, 1611–1625. [Google Scholar] [CrossRef]
- Elery, T.; Rezazadeh, S.; Nesler, C.; Gregg, R.D. Design and Validation of a Powered Knee–Ankle Prosthesis With High-Torque, Low-Impedance Actuators. IEEE Trans. Robot. 2020, 36, 1649–1668. [Google Scholar] [CrossRef]
- Hoover, C.D.; Fulk, G.D.; Fite, K.B. The design and initial experimental validation of an active myoelectric transfemoral prosthesis. J. Med. Device 2012, 6, 011005. [Google Scholar] [CrossRef]
- Canino, J.M.; Fite, K.B. Haptic feedback in lower-limb prosthesis: Combined haptic feedback and EMG control of a powered prosthesis. In Proceedings of the 2016 IEEE EMBS International Student Conference, Ottawa, ON, Canada, 29–31 May 2016; pp. 1–4. [Google Scholar]
- Langlois, D. Reactive Layer Control System for Prosthetic and Orthotic Devices. U.S. Patent 9,808,357 B2, 26 May 2017. [Google Scholar]
- Bedard, S. Control Device and System for Controlling an Actuated Prosthesis. U.S. Patent 9,649,206 B2, 16 May 2017. [Google Scholar]
- Thatte, N.; Shah, T.; Geyer, H. Robust and Adaptive Lower Limb Prosthesis Stance Control via Extended Kalman Filter-Based Gait Phase Estimation. IEEE Robot. Autom. Lett. 2019, 4, 3129–3136. [Google Scholar] [CrossRef]
- Galey, L.; Gonzalez, R.V. Design and Initial Evaluation of a Low-Cost Microprocessor-Controlled Above-Knee Prosthesis: A Case Report of 2 Patients. Prosthesis 2022, 4, 60–72. [Google Scholar] [CrossRef]
- Dey, S.; Yoshida, T.; Foerster, R.H.; Ernst, M.; Schmalz, T.; Schilling, A.F. Continuous Prediction of Joint Angular Positions and Moments: A Potential Control Strategy for Active Knee-Ankle Prostheses. IEEE Trans. Med. Robot. Bionics 2020, 2, 347–355. [Google Scholar] [CrossRef]
- Skelly, M.M.; Chizeck, H.J. Real-Time Gait Event Detection for Paraplegic FES Walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 59–68. [Google Scholar] [CrossRef] [PubMed]
- Lenzi, T.; Hargrove, L.J.; Sensinger, J.W. Preliminary Evaluation of a New Control Approach to Achieve Speed Adaption in Robotic Transfemoral Prostheses. In Proceedings of the International Conference on Intelligent Robots and System (IROS 2014), Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Mendez, J.; Hood, S.; Gunnel, A.; Lenzi, T. Powered Knee and Ankle Prosthesis with Indirect Volitional Swing Control Enables Level-ground Walking and Crossing Over Obstacles. Sci. Robot. 2020, 5, eaba6635. [Google Scholar] [CrossRef] [PubMed]
- Wen, Y.; Li, M.; Si, J.; Huang, H. Wearer-Prosthesis Interaction for Symmetrical Gait: A Study Enabled by Reinforcement Learning Prosthesis Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 904–913. [Google Scholar] [CrossRef]
- Tommaso, L.; Hargrove, L.; Sensinger, J. Speed-adaptation mechanism: Robotic prostheses can actively regulate joint torque. IEEE Robot. Autom. Mag. 2014, 21, 94–107. [Google Scholar]
- Quintero, D.; Villarreal, D.J.; Lambert, D.J.; Kapp, S.; Gregg, R.D. Continuous-phase control of a powered knee ankle prosthesis: Amputee experiments across speeds and inclines. IEEE Trans. Robot. 2018, 34, 686–701. [Google Scholar] [CrossRef]
- Best, T.K.; Embry, K.R.; Rouse, E.J.; Gregg, R.D. Phase-variable control of a powered knee-ankle prosthesis over continuously varying speeds and inclines. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Naber, A.; Mastinu, E.; Ortiz-Catalan, M. Stationary Wavelet Processing and Data Imputing in Myoelectric Pattern Recognition on a Low-Cost Embedded System. IEEE Trans. Med. Robot. Bionics 2019, 1, 256–266. [Google Scholar] [CrossRef]
- Tran, M.; Gabert, L.; Cempini, M.; Lenzi, T. A Lightweight, Efficient Fully Powered Knee Prosthesis With Actively Variable Transmission. in IEEE Robot. Autom. Lett. 2019, 4, 1186–1193. [Google Scholar] [CrossRef]
- Williams, W. A Complete Guide to Binonic Legs & Feet. Available online: https://bionicsforeveryone.com/ (accessed on 17 April 2022).
- Musolf, B.M.; Earley, E.J.; Munoz-Novoa, M.; Ortiz-Catalan, M. Analysis and Design of a Bypass Socket for Transradial Amputations. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Virtual Conference, Guadalajara, Mexico, 1–5 November 2021. [Google Scholar]
- Öberg, V.; Thesleff, A.; Ortiz-Catalan, M. Design of an open-source transfemoral, bypass socket. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Virtual Conference, Guadalajara, Mexico, 1–5 November 2021. [Google Scholar]
- Goldfarb, N.; Lewis, A.; Tacescu, A.; Fischer, G.S. Open source Vicon Toolkit for motion capture and Gait Analysis. Comput. Methods Programs Biomed. 2021, 212, 106414. [Google Scholar] [CrossRef]
- Summa, S.; Tartarisco, G.; Favetta, M.; Buzachis, A.; Romano, A.; Bernava, G.M.; Sancesario, A.; Vasco, G.; Pioggia, G.; Petrarca, M.; et al. Validation of low-cost system for gait assessment in children with ataxia. Comput. Methods Programs Biomed. 2020, 196, 105705. [Google Scholar] [CrossRef] [PubMed]
- Martini, E.; Boldo, M.; Aldegheri, S.; Valè, N.; Filippetti, M.; Smania, N.; Bertucco, M.; Picelli, A.; Bombieri, N. Enabling Gait Analysis in the Telemedicine Practice through Portable and Accurate 3D Human Pose Estimation. Comput. Methods Programs Biomed. 2022, 225, 107016. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Saad, A.P.M.; Syahrom, A.; Uddin, M.; van der Heide, E.; Basri, H. The Effect of Bottom Profile Dimples on the Femoral Head on Wear in Metal-on-Metal Total Hip Arthroplasty. J. Funct. Biomater. 2021, 12, 38. [Google Scholar] [CrossRef] [PubMed]
- Tauviqirrahman, M.; Ammarullah, M.I.; Jamari, J.; Saputra, E.; Winarni, T.I.; Kurniawan, F.D.; Shiddiq, S.A.; van der Heide, E. Analysis of contact pressure in a 3D model of dual-mobility hip joint prosthesis under a gait cycle. Sci. Rep. 2023, 13, 3564. [Google Scholar] [CrossRef] [PubMed]
- Vaughan, C.L.; Davis, L.B.; O’Connor, C.J. Dynamics of Human Gait, 2nd ed.; Vaughan, C.L., Ed.; Kiboho Publisher: Western Cape, South Africa, 1992. [Google Scholar]
- Jamari, J.; Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Permana, M.S.; Winarni, T.I.; Heide, E.V.D. Adopted walking condition for computational simulation approach on bearing of hip joint prosthesis: Review over the past 30 years. Heliyon 2022, 8, e12050. [Google Scholar] [CrossRef] [PubMed]
- Sensinger, J.W.; Intawachirarat, N.; Gard, S.A. Contribution of Prosthetic Knee and Ankle Mechanisms to Swing-Phase Foot Clearance. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 74–80. [Google Scholar] [CrossRef]
- Varol, H.A.; Sup, F.; Goldfarb, M. Multiclass Real-Time Intent Recognition of a Powered Lower Limb Prosthesis. IEEE Trans. Biomed. Eng. 2010, 57, 542–551. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Afif, I.Y.; Maula, M.I.; Winarni, T.I.; Tauviqirrahman, M.; Akbar, I.; Basri, H.; van der Heide, E. Jamari Tresca Stress Simulation of Metal-on-Metal Total Hip Arthroplasty during Normal Walking Activity. Materials 2021, 14, 7554. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Hartono, R.; Supriyono, T.; Santoso, G.; Sugiharto, S.; Permana, M.S. Polycrystalline Diamond as a Potential Material for the Hard-on-Hard Bearing of Total Hip Prosthesis: Von Mises Stress Analysis. Biomedicines 2023, 11, 951. [Google Scholar] [CrossRef]
- Prakoso, A.T.; Basri, H.; Adanta, D.; Yani, I.; Ammarullah, M.I.; Akbar, I.; Ghazali, F.A.; Syahrom, A. Kamarul The Effect of Tortuosity on Permeability of Porous Scaffold. Biomedicines 2023, 11, 427. [Google Scholar] [CrossRef]
- Putra, R.U.; Basri, H.; Prakoso, A.T.; Chandra, H.; Ammarullah, M.I.; Akbar, I.; Syahrom, A. Kamarul Level of Activity Changes Increases the Fatigue Life of the Porous Magnesium Scaffold, as Observed in Dynamic Immersion Tests, over Time. Sustainability 2023, 15, 823. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Walking Pattern (Degree) | Running Pattern (Degree) | |||||
|---|---|---|---|---|---|---|---|
| Hip angle | Highest angle | 25.47 | 25.20 | 24.13 | 33.01 | 32.80 | 32.60 |
| Lowest angle | −11.22 | −13.33 | −13.76 | −10.93 | −8.10 | −11.64 | |
| 36.69 | 38/53 | 37.89 | 43.94 | 40.90 | 44.24 | ||
| Knee angle | Highest angle | 64.92 | 64.81 | 65.20 | 84.41 | 83.66 | 77.69 |
| Lowest angle | 0 * | 0 * | 0 * | 0 * | 0 * | 0 * | |
| 64.92 | 65.81 | 65.20 | 84.41 | 83.66 | 77.69 | ||
| ) | 1.77 | 1.68 | 1.72 | 1.91 | 2.05 | 1.76 | |
| Average Ratio | 1.82 (empirical setting in this paper) | ||||||
| Number of Subjects | Gender (M/F) * | Age | Thigh Length (cm) | Shank Length | Body Height (cm) | Body Weight (kg) |
|---|---|---|---|---|---|---|
| 5 | 4/1 | 21–27 | 43–53 | 35–43 | 160–183 | 48–76 |
| Speed | Stance Phase | Swing Flexion Phase | Swing Extension Phase |
|---|---|---|---|
| 50 cm/s | 12.484/5.884 * | 6.856/0.256 * | 8.553/1.953 * |
| 60 cm/s | 12.029/5.429 * | 6.331/0.269 * | 14.478/7.878 * |
| 70 cm/s | 10.913/4.313 * | 6.862/0.262 * | 20.066/13.466 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pranata, I.W.D.; Nguyen, P.T.-T.; Su, K.-H.; Kuo, Y.-C.; Kuo, C.-H. Knee Angle Generation with Walking Speed Adaptation Ability for a Powered Transfemoral Prosthetic Leg Prototype. Inventions 2023, 8, 67. https://doi.org/10.3390/inventions8030067
Pranata IWD, Nguyen PT-T, Su K-H, Kuo Y-C, Kuo C-H. Knee Angle Generation with Walking Speed Adaptation Ability for a Powered Transfemoral Prosthetic Leg Prototype. Inventions. 2023; 8(3):67. https://doi.org/10.3390/inventions8030067
Chicago/Turabian StylePranata, I Wayan Dani, Phuc Thanh-Thien Nguyen, Kuo-Ho Su, Yu-Cheng Kuo, and Chung-Hsien Kuo. 2023. "Knee Angle Generation with Walking Speed Adaptation Ability for a Powered Transfemoral Prosthetic Leg Prototype" Inventions 8, no. 3: 67. https://doi.org/10.3390/inventions8030067