
Finite Element Analysis in the Balancing Phase for an Open Source Transfemoral Prosthesis with Magneto-Rheological Damper

 ,
, 
 and
and
Abstract
:1. Introduction
2. Materials and Methods
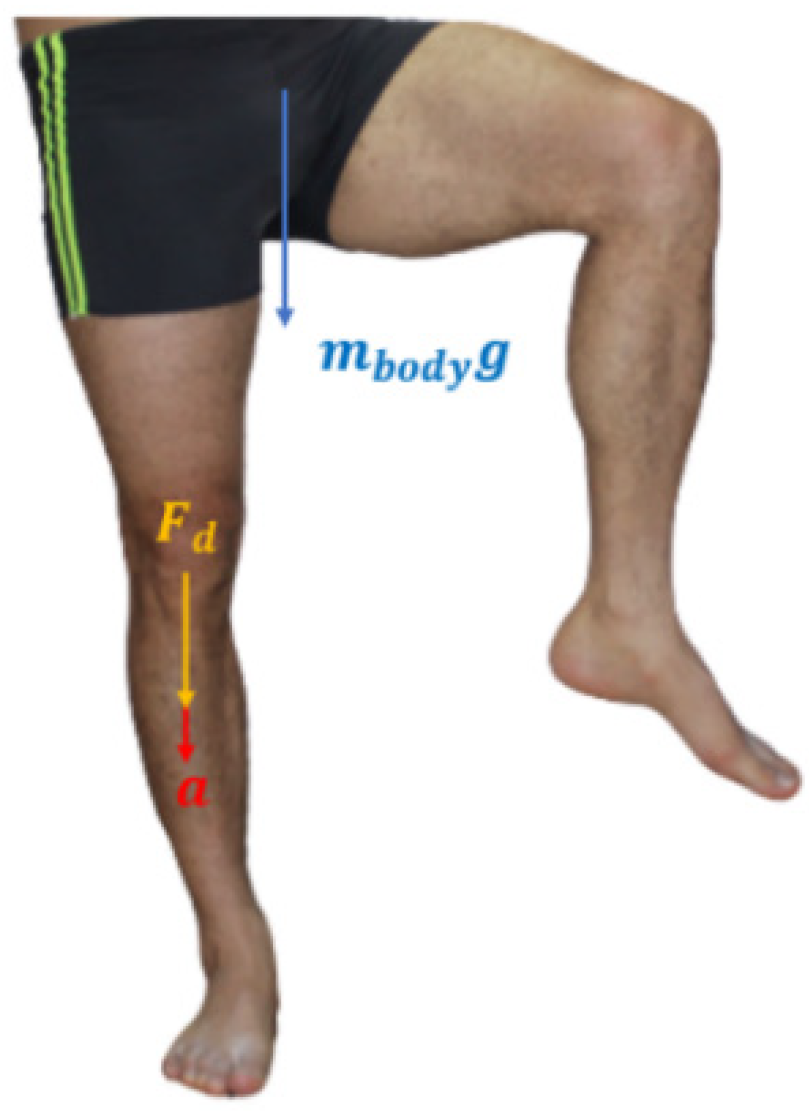
2.1. Balancing Phase Force Analysis
2.2. FEM
2.3. Principle of Virtual Work
2.4. Fatigue
2.5. CAE Implementation
3. Results and Discussion
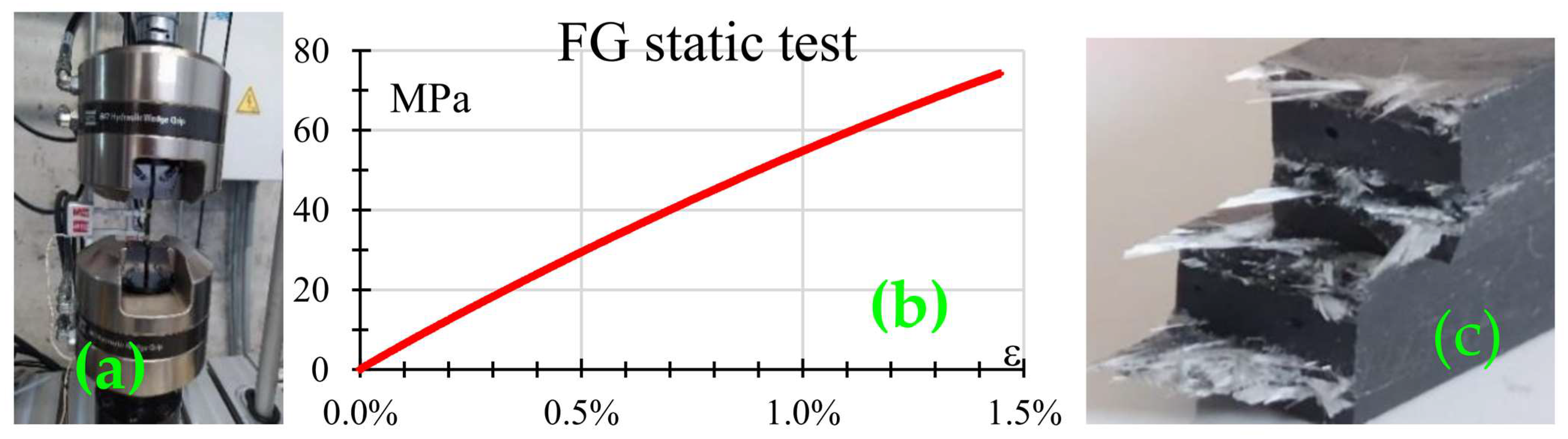
3.1. Fiberglass Mechanical Testing
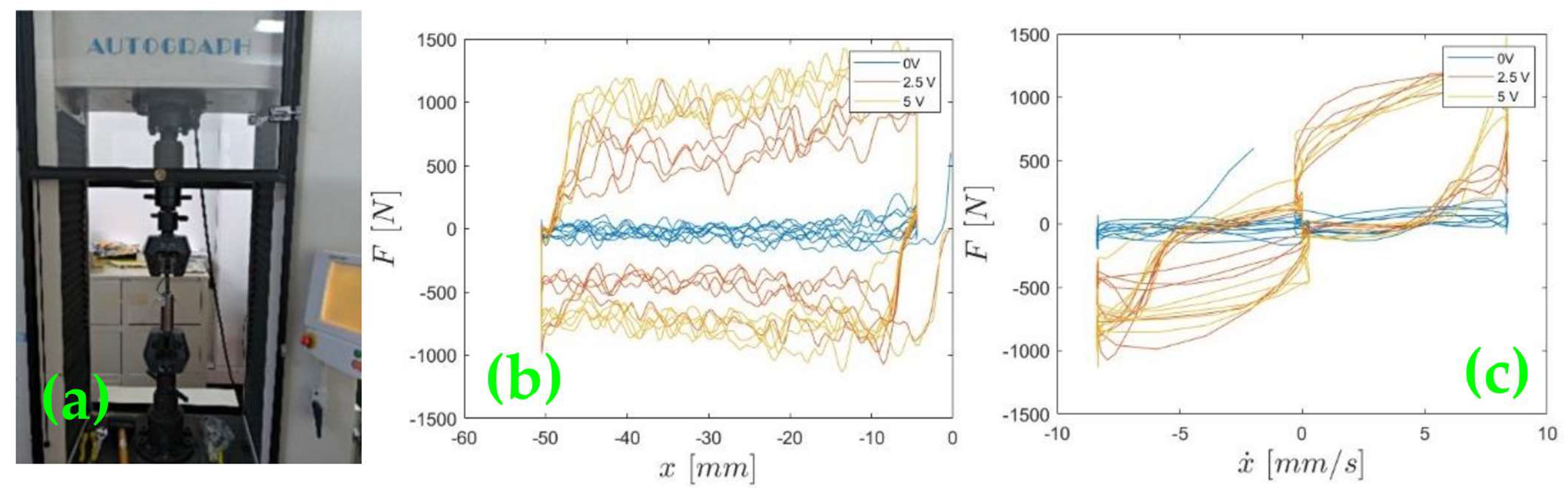
3.2. Mechanical Tests on the Magnetorheological Damper
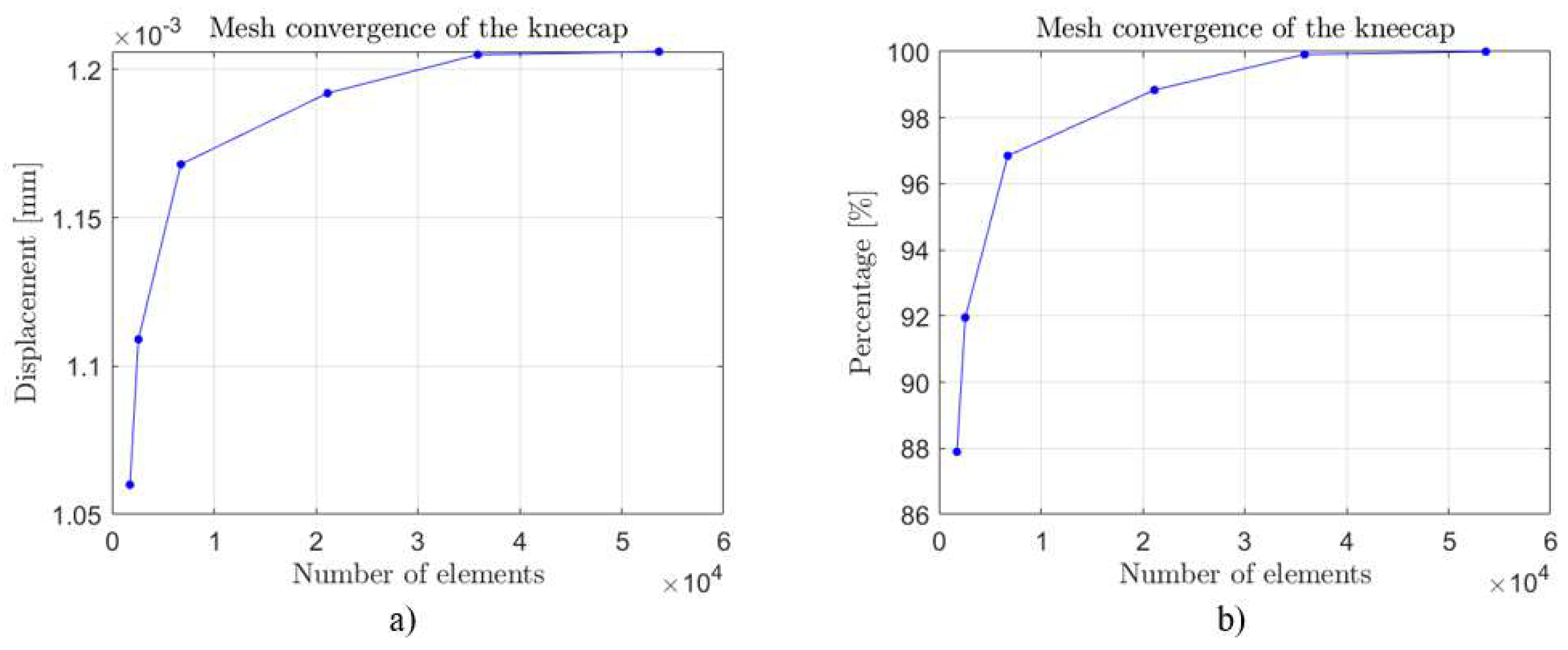
3.3. Mesh Independence
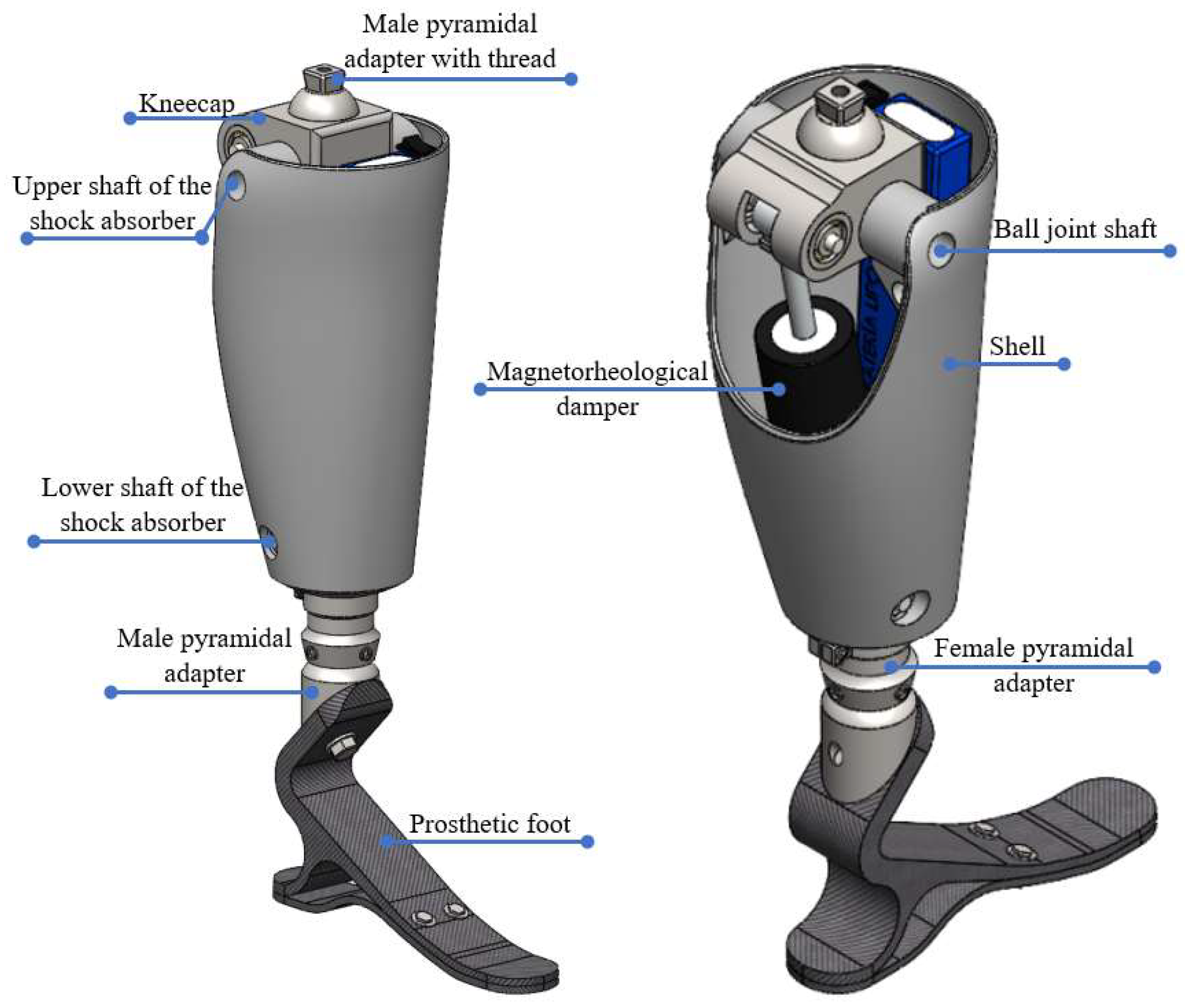
3.4. Male Pyramidal Adapter with Thread
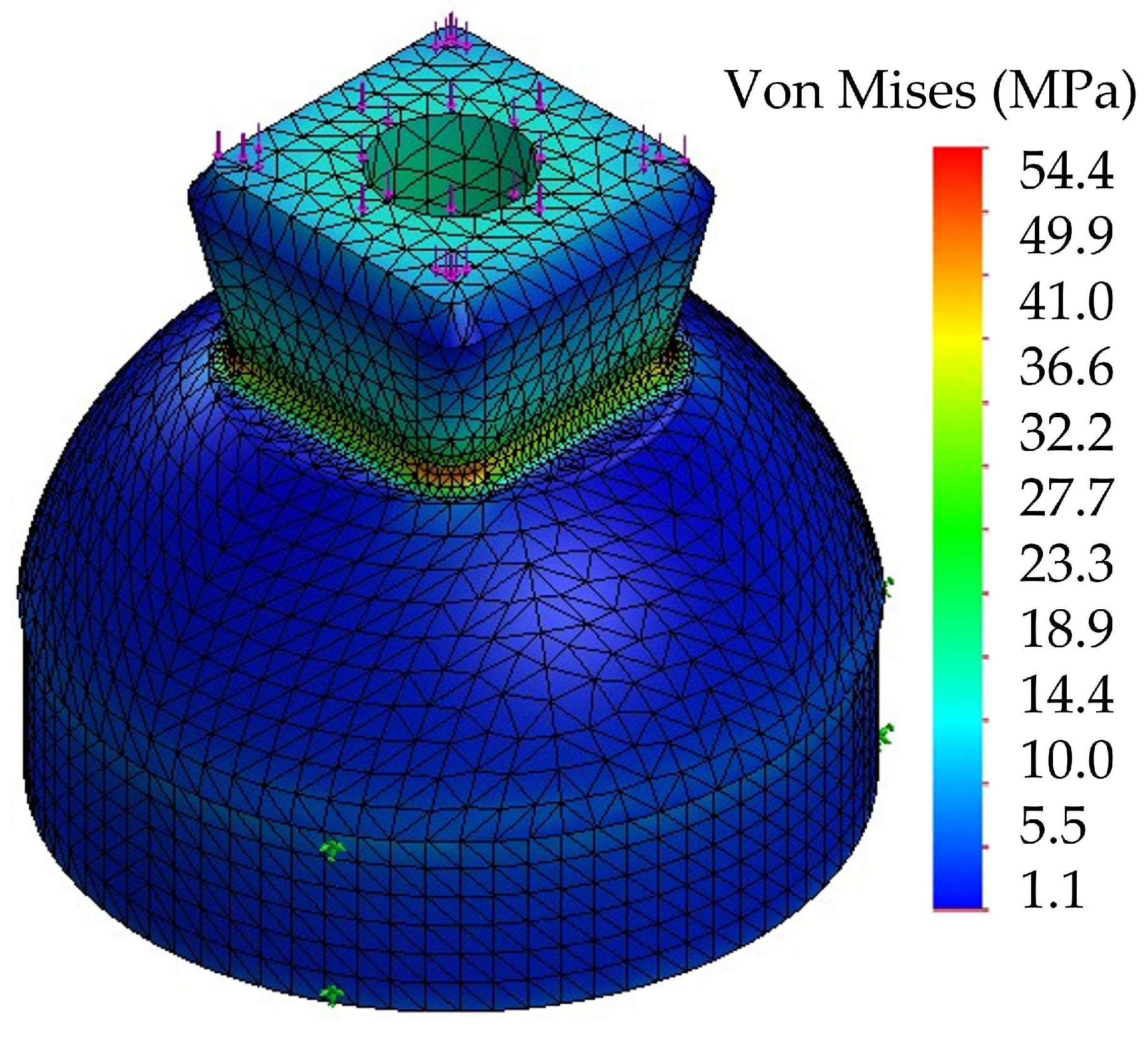
3.5. Kneecap
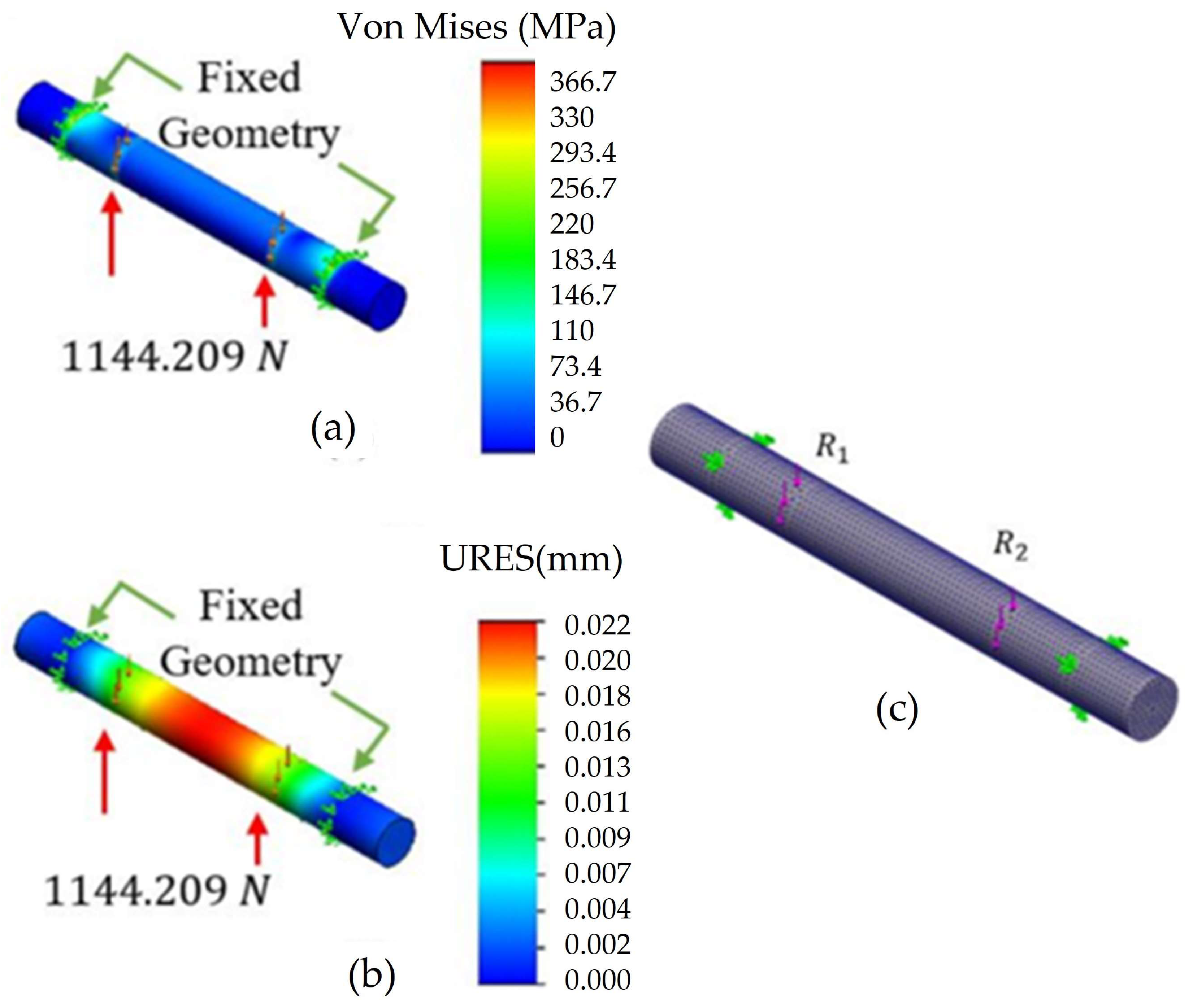
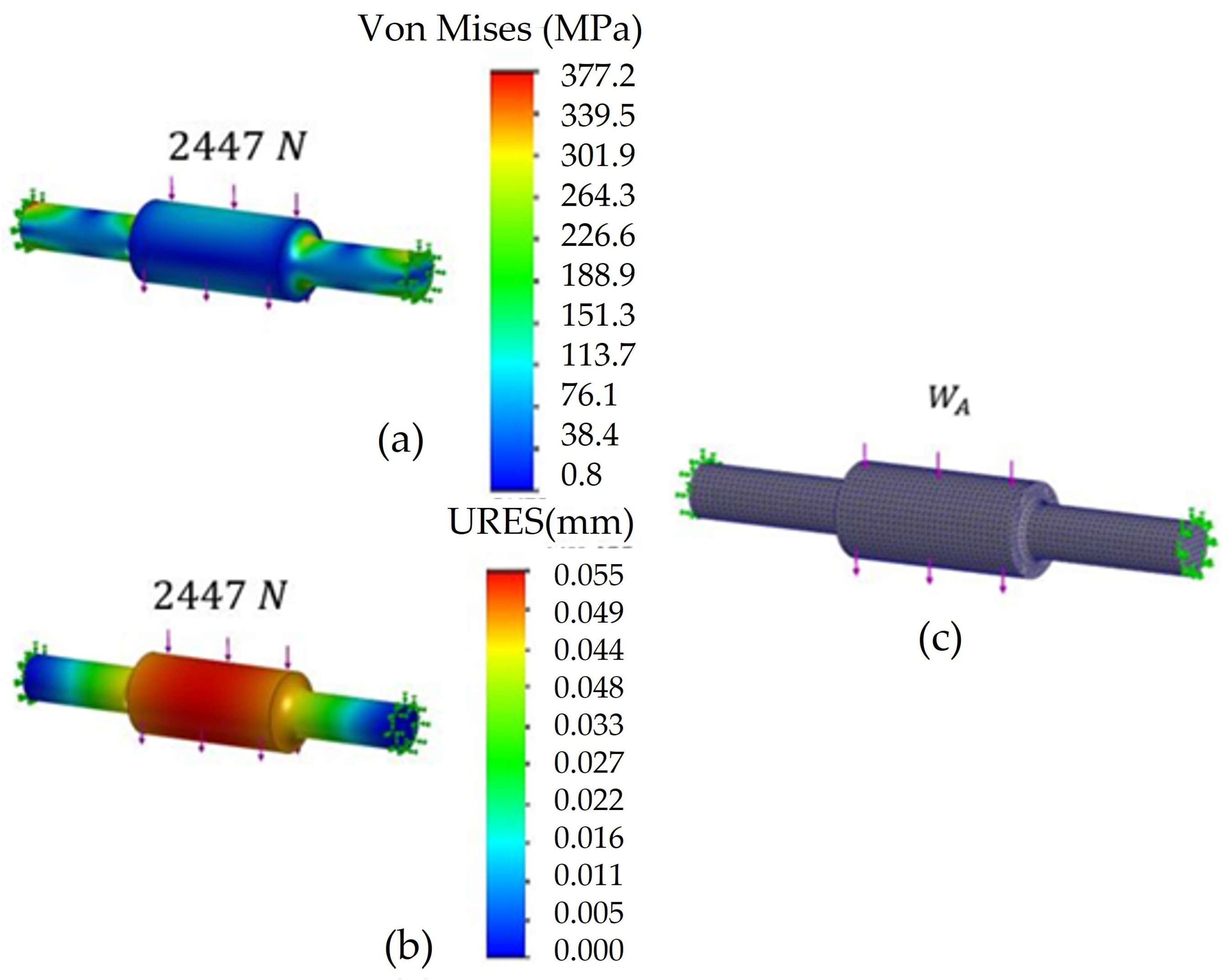
3.6. Ball Joint Shaft
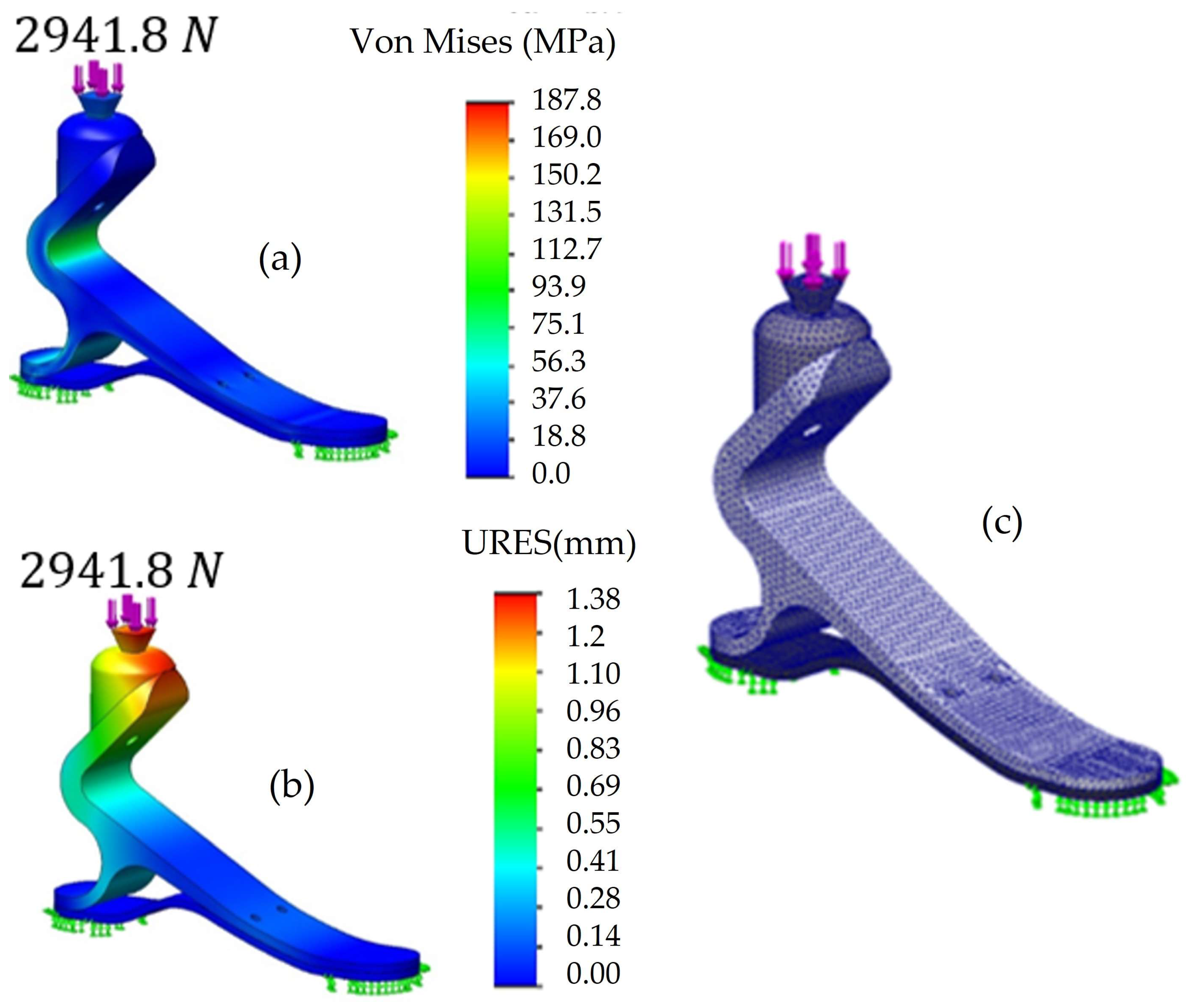
3.7. Upper Axle of the Shock Absorber
3.8. Female Pyramidal Adapter
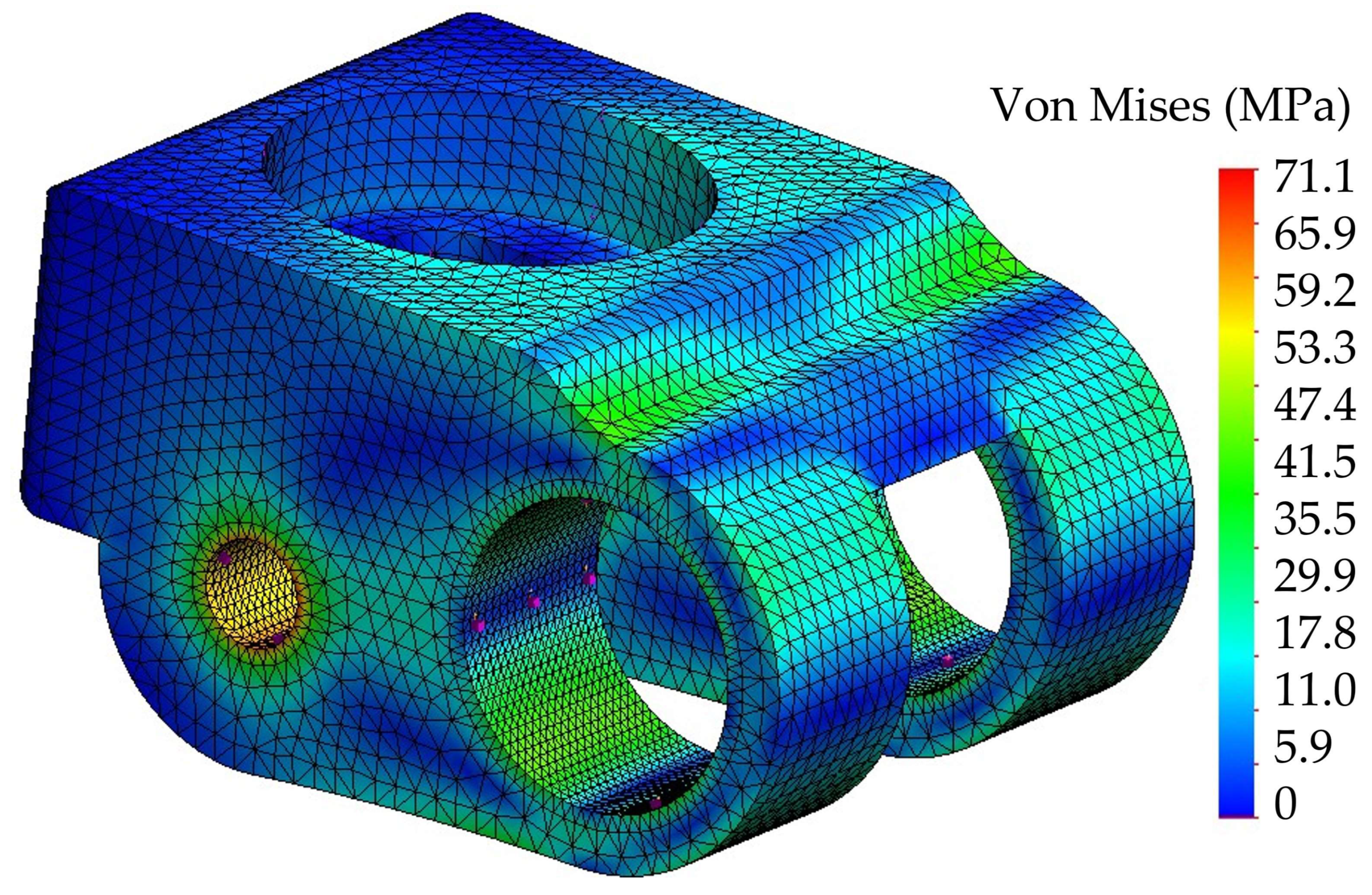
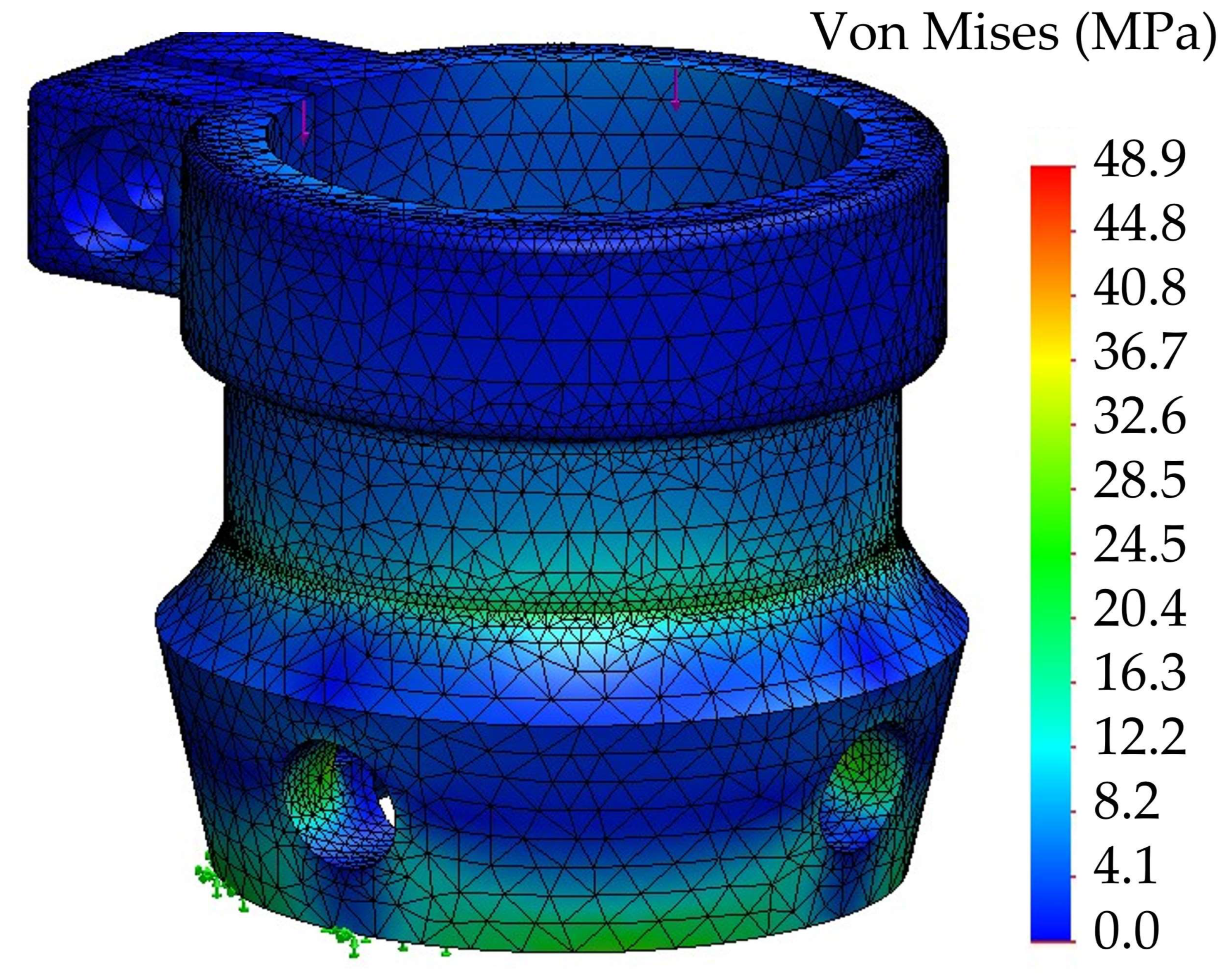
3.9. Housing
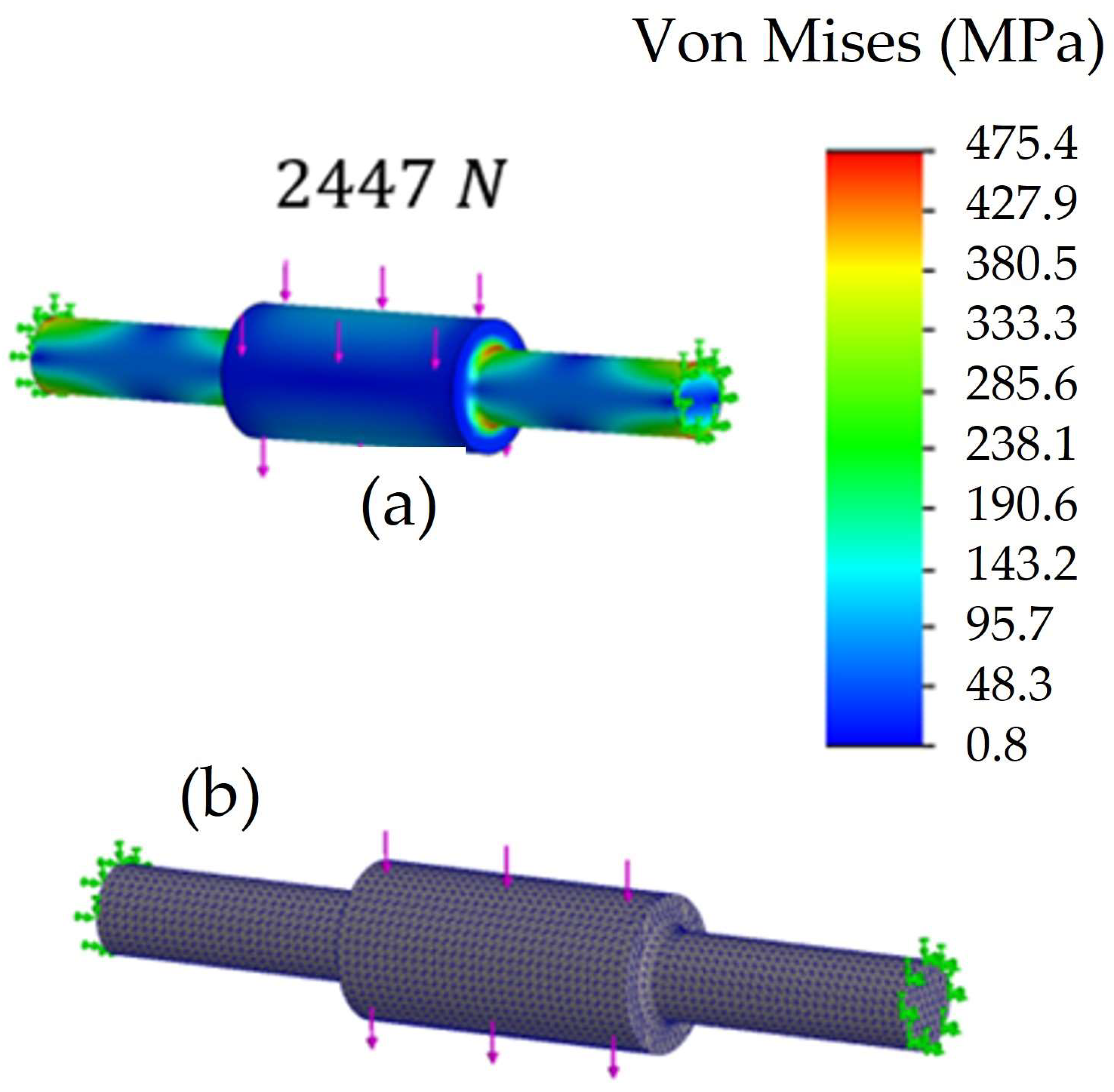
3.10. Lower Shaft of the Shock Absorber
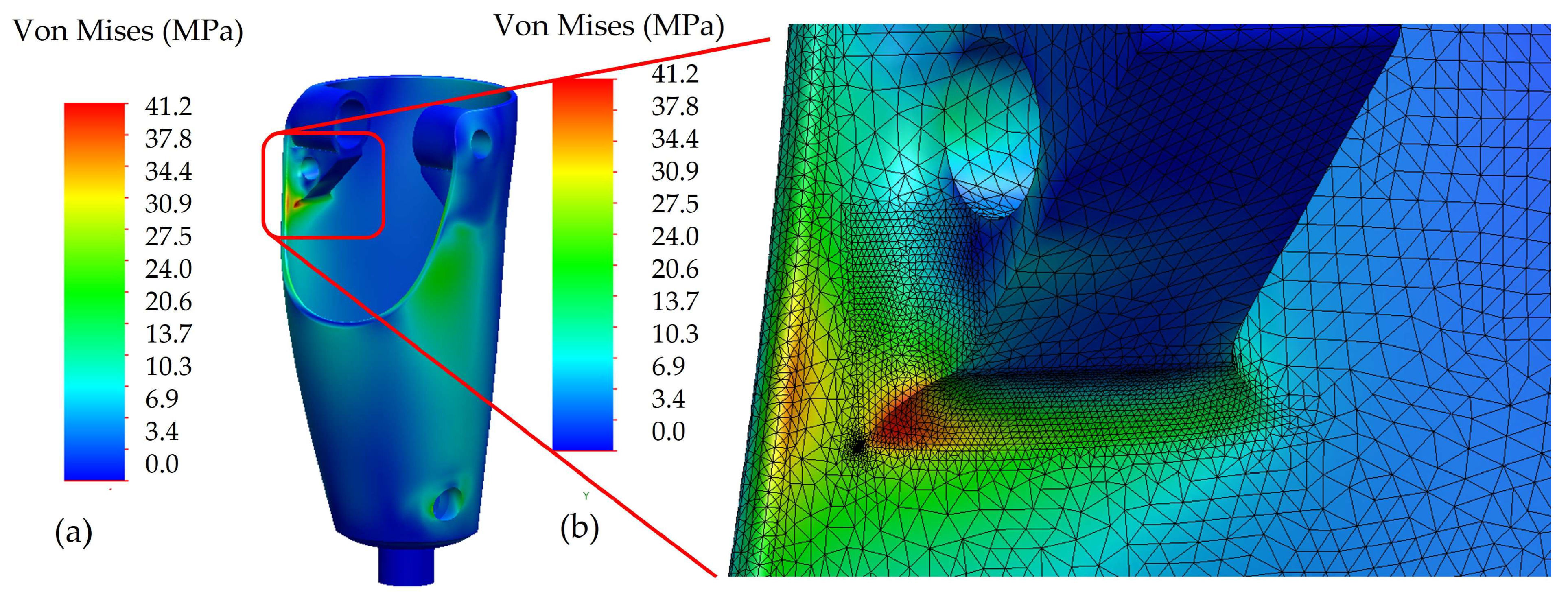
3.11. Prosthetic Foot
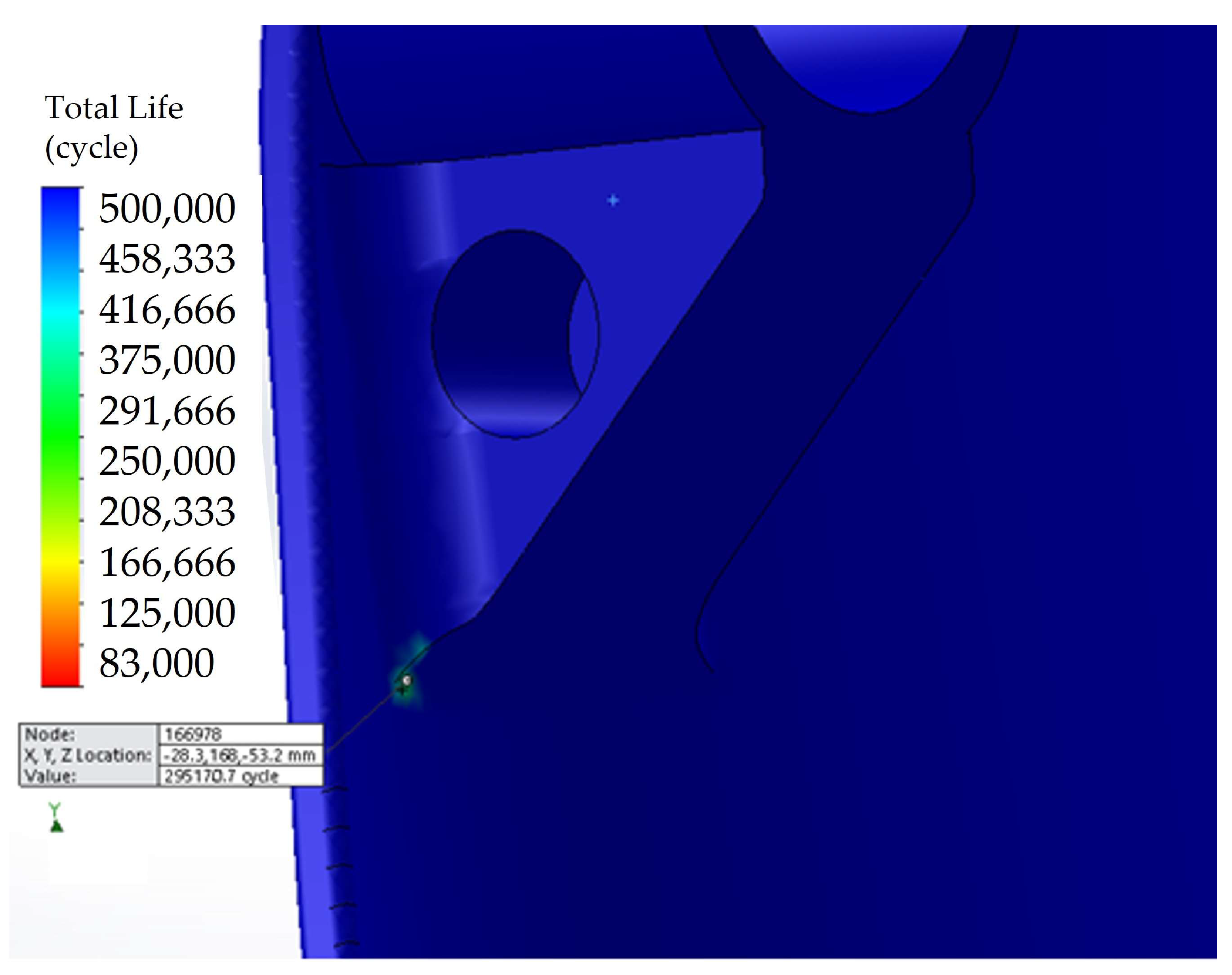
3.12. Fatigue Analysis
3.13. Built Prosthetic Leg
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ocampo, M.L.; Henao, L.M.; Vasquez, L. Amputación de Miembro Inferior; Cambios Funcionales y Actividad Física: Bogotá, Colombia, 2010. [Google Scholar]
- Valencia Aguirre, F.V.; Mejía Echeverria, C.D.; Erazo-Arteaga, V. Desarrollo de una prótesis de rodilla para amputaciones transfemorales usando herramientas computacionales. CAD CAE CAM Rev. UIS 2017, 16, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Quintero Quiroz, C.; Jaramillo Zapata, A.; De Ossa Jiménez, M.T.; Villegas Bolaños, P.A. Estudio descriptivo de condiciones del muñón en personas usuarias de prótesis de miembros inferiores. Rev. Colomb. De Médicina Física Y Rehabil. 2015, 25, 94–103. [Google Scholar] [CrossRef] [Green Version]
- Konya, M.N.; Verim, Ö. Numerical Optimization of the Position in Femoral Head of Proximal Locking Screws of Proximal Femoral Nail System; Biomechanical Study. Balkan Med. J. 2017, 34, 425–431. [Google Scholar] [CrossRef] [PubMed]
- Ocaña, E. Diseño y Análisis de Esfuerzos de Prótesis Transfemoral Pasiva Basada en Mecanismo de Cuatro Barras. Master’s Thesis, Centro de Tecnología Avanzada CIATEQ, Villahermosa, Mexico, 2018. [Google Scholar]
- Sterkenburg, A.J.; Van der Stelt, M.; Koroma, A.R.; Van Gaalen, M.D.; Van der Pols, M.J.; Grobusch, M.P.; C.H. Slump, C.H.; Maal, T.J.J.; Brouwers, L. Quality of life of patients with 3D-printed arm prostheses in a rural area of Sierra Leone. Heliyon 2021, 7, e07447. [Google Scholar] [CrossRef]
- Luengas-Contreras, L.A.; Camargo-Casallas, E.; Guardiola, D. Modelagem e simulaāo da marcha protética usando modelo em 3D de uma prótese transtibial. Rev. Cienc. Salud 2018, 16, 82. [Google Scholar] [CrossRef] [Green Version]
- Portnoy, S.; Yizhar, Z.; Shabshin, N.; Itzchak, Y.; Kristal, A.; Dotan-Marom, Y.; Siev-Ner, I.; Gefen, A. Internal mechanical conditions in the soft tissues of a residual limb of a trans-tibial amputee. J. Biomech. 2008, 41, 1897–1909. [Google Scholar] [CrossRef]
- Tao, Z.; Ahn, H.-J.; Lian, C.; Lee, K.-H.; Lee, C.-H. Design and optimization of prosthetic foot by using polylactic acid 3D printing. J. Mech. Sci. Technol. 2017, 31, 2393–2398. [Google Scholar] [CrossRef]
- Tamayo, J.A.; Riascos, M.; Vargas, C.A.; Baena, L.M. Additive manufacturing of Ti6Al4V alloy via electron beam melting for the development of implants for the biomedical industry. Heliyon 2021, 7, e06892. [Google Scholar] [CrossRef]
- Díaz-Rodríguez, J.G.; Pertúz-Comas, A.D.; González-Estrada, O.A. Mechanical properties for long fibre reinforced fused deposition manufactured composites. Compos. B Eng. 2021, 211, 108657. [Google Scholar] [CrossRef]
- Veiga, F.; Bhujangrao, T.; Suárez, A.; Aldalur, E.; Goenaga, I.; Gil-Hernandez, D. Validation of the Mechanical Behavior of an Aeronautical Fixing Turret Produced by a Design for Additive Manufacturing (DfAM). Polymers 2022, 14, 2177. [Google Scholar] [CrossRef]
- Veiga, F.; Suárez, A.; Aldalur, E.; Goenaga, I.; Amondarain, J. Wire Arc Additive Manufacturing Process for Topologically Optimized Aeronautical Fixtures. 3D Print Addit. Manuf. 2021. [Google Scholar] [CrossRef]
- Correal Franco, S.; Palacio Delgado, L.J.; Salazar Gómez, I.C. Análisis FEA de prótesis de rodilla policéntrica. Av. En Sist. E Inf. 2006, 3, 35–38. [Google Scholar]
- Sánchez, J.; Hernández, R.; Torres, J. The mechanical design of a transfemoral prosthesis using computational tools and design methodology. Ing. E Investig. 2012, 3, 14–18. [Google Scholar]
- Castro-Junco, J.O. Diseño de Prótesis Transfemoral. Master’s Thesis, Universidad de América, Bogota, Colombia, 2018. [Google Scholar]
- Cely, M.; Robledo, A. Análisis por elementos finitos aplicados a separadores de cadera como predictor en el diseño de instrumental quirúrgico. Dyna 2011, 78, 213–219. [Google Scholar]
- Erazo Bravo, M.I.; Mera Otoya, E.P. Diseño e Implementación de un Prototipo de Prótesis Transtibial con Amortiguamiento Activo Mediante la Investigación del Comportamiento de Materiales Magnetoreológicos Bajo Diferentes Campos Magnéticos. Master’s Thesis, Universidad de Fuerzas Armadas ESPE, Latacunga, Ecuador, 2017. [Google Scholar]
- Fábrica, G.; Peña, I.; Silva-Pereyra, V.; Ramos-Arim, V. Aprovechamiento de energía, cinemática y estabilidad en la marcha de un paciente con amputación transfemoral sin abordaje de rehabilitación. Rev. De La Fac. De Med. 2018, 66, 59–68. [Google Scholar] [CrossRef]
- Mankai, W.; Brahim, S.B.; Smida, B.B.; Cheikh, R.B.; Chafra, M. Mechanical behavior of a lower limb prosthetic socket made of natural fiber reinforced composite. J. Eng. Res. 2021, 9, 269–277. [Google Scholar] [CrossRef]
- López-Gualdrón, C.I.; Bautista-Rojas, L.E.; Machuca-Gelvez, J.A. Reconstrucción 3D para el desarrollo de prótesis de miembro inferior. Rev. UIS Ing. 2020, 19, 73–85. [Google Scholar] [CrossRef]
- Wevers, H.W.; Durance, J.P. Dynamic testing of below-knee prosthesis. Prosthet. Orthot. Int. 1987, 11, 117–123. [Google Scholar] [CrossRef] [Green Version]
- Jelačić, Z.; Ustamujić, F.; Dedić, R.; Husnić, Ž. Development of 3D Printed Transfemoral Prosthetic Leg with Actuated Joints. In Proceedings of the New Technologies, Development and Application V, Sarajevo, Bosnia and Herzegovia, 23–25 June 2022; pp. 209–219. [Google Scholar] [CrossRef]
- Ospina-Henao, P.A.; Valencia, C.H.; Becker, M.; Mora, P.Z.A.; Vásquez, S.M. Modeling of a Leg and Knee System for the Analysis of Human Gait by Means of State Feedback Control. Front. Artif. Intell. Appl. 2020, 322, 288–301. [Google Scholar] [CrossRef]
- Valencia, C.H.; Vellasco, M.; Tanscheit, R.; Figueiredo, K.T. Magnetorheological Damper Control in a Leg Prosthesis Mechanical. In Robot Intelligence Technology and Applications; Springer: Berlin/Heidelberg, Germany, 2015; Volume 3, pp. 805–818. [Google Scholar] [CrossRef]
- Kurowski, P. Engineering Analysis with SOLIDWORKS Simulation, 1st ed.; SDC Publications: Mission, KS, USA, 2018. [Google Scholar]
- LORD Corporation. RD-8040-1 and RD-8041-1 Dampers; Technical data; LORD Corporation: Cary, NC, USA, 2009. [Google Scholar]
- Rodríguez-Torres, A.; López-Pacheco, M.; Morales-Valdez, J.; Yu, W.; Díaz, J.G. Robust Force Estimation for Magnetorheological Damper Based on Complex Value Convolutional Neural Network. J. Comput. Nonlinear Dyn. 2022, 17, 121003. [Google Scholar] [CrossRef]
- Zuly, A.M.P.; Vásquez, S.M.; Valencia, C.H.; Carreño Zagarra, J.J.; Becker, M.; Ospina Henao, P.A. Discrete control of transfemoral prostheses for human walking with magnetorheological compensation. J. Phys. Conf. Ser. 2022, 2307, 012017. [Google Scholar] [CrossRef]
- Taylor, J. Classical Mechanics; University Science Books: Melville, NY, USA, 2005. [Google Scholar]
- Barbero, E.J. Finite Element Analysis of Composite Materials Using ANSYS, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Ashby, M.F. Materials Selection in Mechanical Design, 4th ed.; Elsevier: Oxford, UK, 2011. [Google Scholar] [CrossRef] [Green Version]
- González-Estrada, O.A.; Pertuz Comas, A.D.; Díaz Rodríguez, J.G. Monotonic load datasets for additively manufactured thermoplastic reinforced composites. Data Brief 2020, 29, 105295. [Google Scholar] [CrossRef] [PubMed]
- Pertuz-Comas, A.D.; Díaz, J.G.; Meneses-Duran, O.J.; Niño-Álvarez, N.Y.; León-Becerra, J. Flexural Fatigue in a Polymer Matrix Composite Material Reinforced with Continuous Kevlar Fibers Fabricated by Additive Manufacturing. Polymers 2022, 14, 3586. [Google Scholar] [CrossRef] [PubMed]
- Parrado-Agudelo, J.Z.; Narváez-Tovar, C. Mechanical characterization of polylactic acid, polycaprolactone and Lay-Fomm 40 parts manufactured by fused deposition modeling, as a function of the printing parameters. ITECKNE 2019, 16, 25–31. [Google Scholar] [CrossRef] [Green Version]
- EL-Wazery, M.S.; EL-Elamy, M.I.; Zoalfakar, S.H. Mechanical properties of glass fiber reinforced polyester composites. Int. J. Appl. Sci. Eng. 2016, 14, 121–131. [Google Scholar] [CrossRef]
- Sun, X.; Li, Y.; Engler-Pinto, C.; Huang, L.; Huang, S.; Li, Z.; Tang, H.; Bao, Z.; Cui, H.; Zeng, D.; et al. Characterization and modeling of fatigue behavior of chopped glass fiber reinforced sheet molding compound (SMC) composite. Int. J. Fatigue 2022, 156, 106647. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Number of Elements | Number of Nodes | Material | Modulus of Elasticity, E (GPa) | Poisson | Manufacturing Method | Mass (g) |
|---|---|---|---|---|---|---|---|
| Male pyramidal adapter with thread | 49,942 | 72,515 | 304 stainless steel | 200 | 0.28 | Machined | 142 |
| Kneecap | 53,664 | 80,941 | 304 stainless steel | 200 | 0.28 | Machined | 660 |
| Ball joint shaft | 47,529 | 70,038 | SAE 4140 | 210 | 0.28 | Machined | 43 |
| Upper shaft of the shock absorber | 44,987 | 65,898 | SAE 4140 | 210 | 0.28 | Machined | 37 |
| Housing shell | 260,300 | 159,342 | GRC woven | 103 | 0.22 | Laminated composite | 470 |
| Lower shaft of the shock absorber | 44,701 | 65,945 | SAE 4140 | 210 | 0.28 | Machined | 37 |
| Female pyramidal adapter | 57,617 | 90,829 | 304 stainless steel | 200 | 0.28 | Machined | 121 |
| Prosthetic foot group | 56,937 | 91,037 | 3D carbon composite | 14.2 | 0.2 | AM | 414 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz-Vásquez, S.; Mora-Pérez, Z.A.; Ospina-Henao, P.A.; Valencia-Niño, C.H.; Becker, M.; Díaz-Rodríguez, J.G. Finite Element Analysis in the Balancing Phase for an Open Source Transfemoral Prosthesis with Magneto-Rheological Damper. Inventions 2023, 8, 36. https://doi.org/10.3390/inventions8010036
Muñoz-Vásquez S, Mora-Pérez ZA, Ospina-Henao PA, Valencia-Niño CH, Becker M, Díaz-Rodríguez JG. Finite Element Analysis in the Balancing Phase for an Open Source Transfemoral Prosthesis with Magneto-Rheological Damper. Inventions. 2023; 8(1):36. https://doi.org/10.3390/inventions8010036
Chicago/Turabian StyleMuñoz-Vásquez, Sebastian, Zuly Alexandra Mora-Pérez, Paolo Andrés Ospina-Henao, César Hernando Valencia-Niño, Marcelo Becker, and Jorge Guillermo Díaz-Rodríguez. 2023. "Finite Element Analysis in the Balancing Phase for an Open Source Transfemoral Prosthesis with Magneto-Rheological Damper" Inventions 8, no. 1: 36. https://doi.org/10.3390/inventions8010036