

Development of a Method for Improving the Energy Efficiency of Oil Production with an Electrical Submersible Pump

Abstract
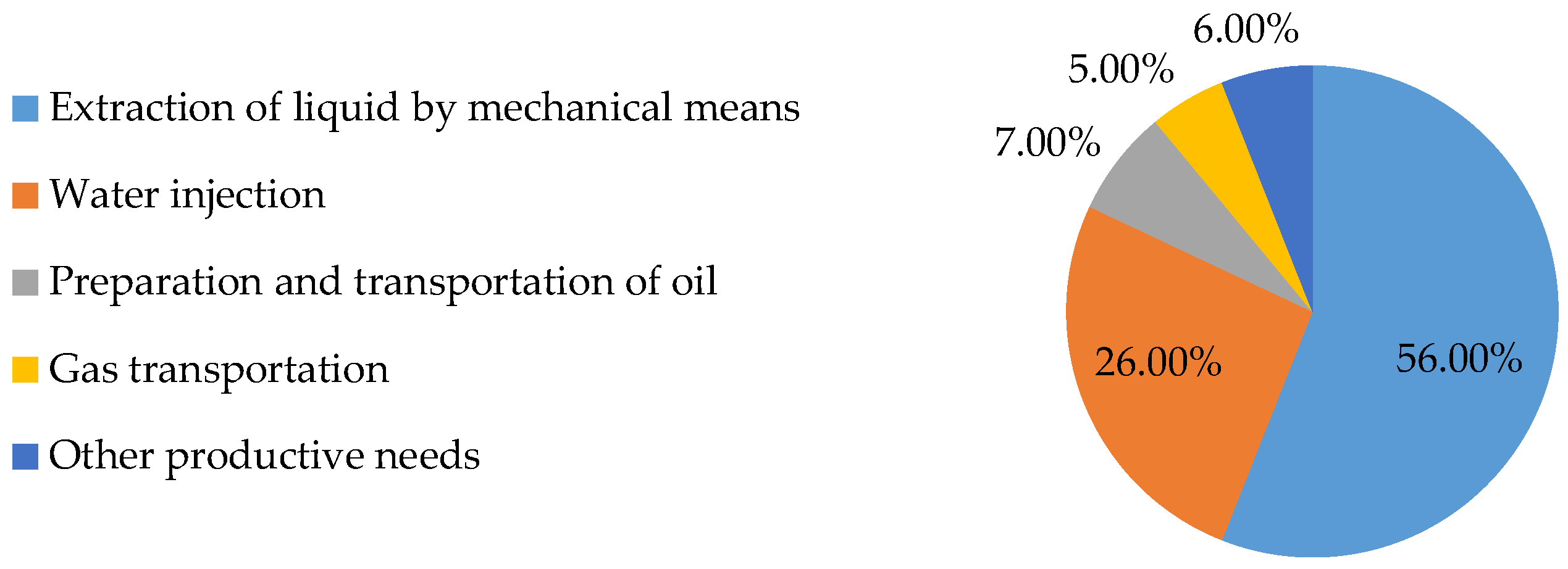
:1. Introduction
2. Materials and Methods
2.1. Calculation of Well Characteristics
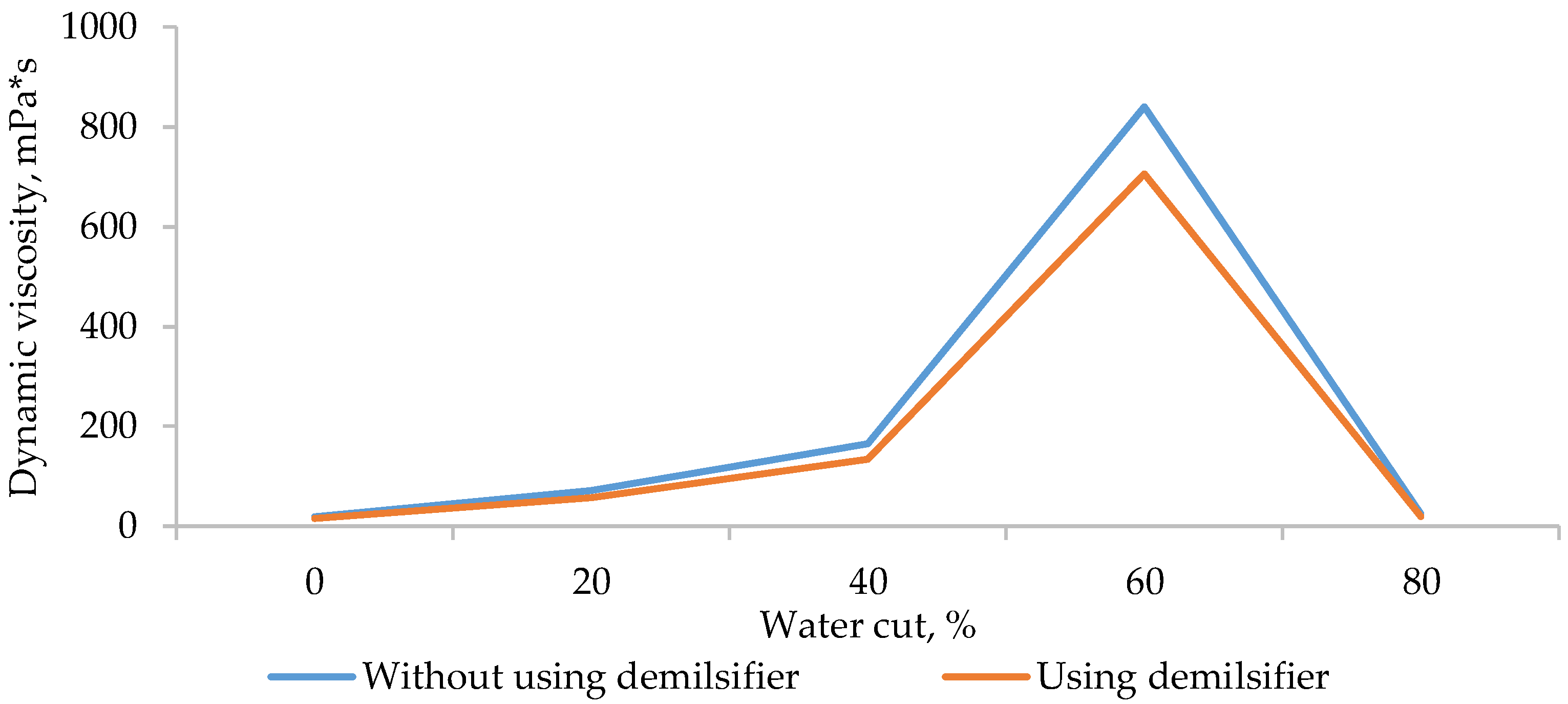
2.2. Determination of the Effect of Demulsifier Feed on HVE Viscosity
2.3. Calculation of the Power Consumption of an Electrical Submersible Pump Installation
2.3.1. Electrical Submersible Pump
2.3.2. Submersible Electric Motor
2.3.3. Cable Line
2.3.4. Transformer
2.3.5. Control Station
2.4. Optimal Frequency Value Calculation
2.5. Influence of Fluid Viscosity on the Head Characteristic of a Pump
3. Results
3.1. Initial Data
3.2. Determination of the Effectiveness of the Use of Demulsifiers
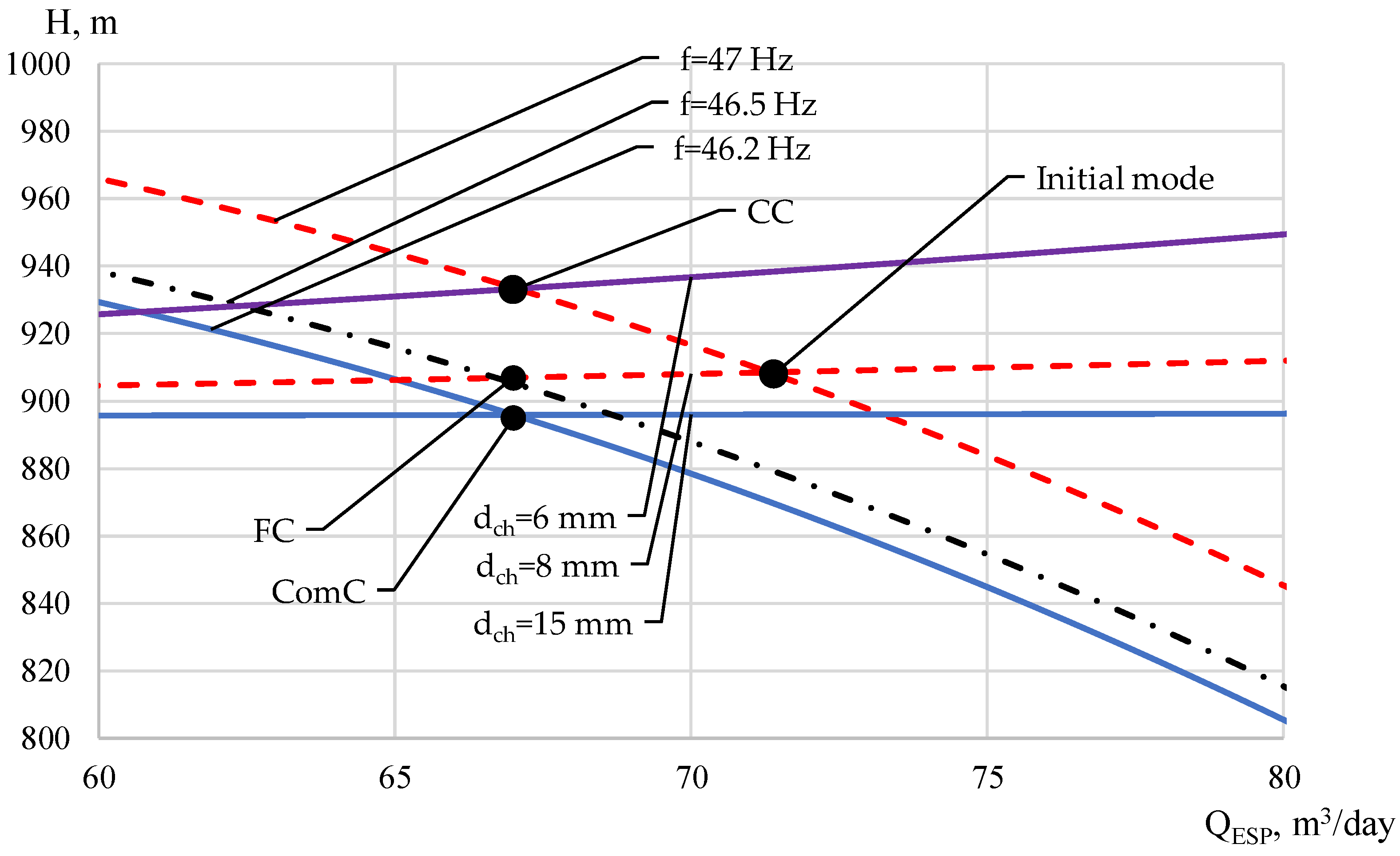
3.3. Modeling Modes
- Initial mode;
- Choke control (CC);
- Frequency control (FC);
- Combined control (choke control and frequency control) (ComC).
- Without using a demulsifier (wUD);
- Without using a demulsifier (UD).
4. Discussion
- 1.
- The developed method for calculating power consumption allows us to estimate the amount of electricity consumption by an electrical submersible pump installation based on the mode, and not the nominal parameters of the electrical and mechanical equipment, while also taking into account the mutual influence of the equipment.
- 2.
- The developed method for power consumption calculation does not require large computing power, which allows us to assess the energy efficiency potential of electric submersible pump installations and can be implemented on the basis of programmable logic controllers of intellectual control stations.
- 3.
- The developed method for calculating power consumption allows us to evaluate the energy efficiency of the technological mode, and we can choose and justify the change of the well to a repeated short-term or long-term operation mode.
- 4.
- The technique for calculating the control station voltage frequency is carried out not with respect to the pump nominal parameters, but with respect to the pump head curve extreme points, which makes it possible to consider the individuality of the characteristics of various pumps.
- 5.
- The developed technique for improving energy efficiency, in addition to reducing the costs of production, can also have an effect in planning the inventory of equipment necessary to ensure the specified parameters of the technological mode.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Galkin, S.V.; Krivoshchekov, S.N.; Kozyrev, N.D.; Kochnev, A.A.; Mengaliev, A.G. Accounting of geomechanical layer properties in multi-layer oil field development. J. Min. Inst. 2020, 244, 408–417. [Google Scholar] [CrossRef]
- Nurgalieva, K.S.; Saychenko, L.A.; Riazi, M. Improving the Efficiency of Oil and Gas Wells Complicated by the Formation of Asphalt–Resin–Paraffin Deposits. Energies 2021, 14, 6673. [Google Scholar] [CrossRef]
- Bakker, S.J.; Kleiven, A.; Fleten, S.E.; Tomasgard, A. Mature offshore oil field development: Solving a real options problem using stochastic dual dynamic integer programming. Comput. Oper. Res. 2021, 136, 105480. [Google Scholar] [CrossRef]
- Xuxin, W.A.N.; Guanglong, X.I.E.; Yugang, D.I.N.G. Exploration of geology-engineering integration in hard-to-recover reserves in the Shengli Oilfield. China Pet. Explor. 2020, 25, 43. [Google Scholar]
- Ilushin, P.Y.; Vyatkin, K.A.; Kozlov, A.V. Development of intelligent algorithms for controlling peripheral technological equipment of the well cluster using a single control station. Bull. Tomsk. Polytech. Univ. Geo Assets Eng. 2022, 333, 59–68. [Google Scholar]
- Müller, E.R.; Camponogara, E.; Seman, L.O.; Hülse, E.O.; Vieira, B.F.; Miyatake, L.K.; Teixeira, A.F. Short-term steady-state production optimization of offshore oil platforms: Wells with dual completion (gas-lift and ESP) and flow assurance. Top 2022, 30, 152–180. [Google Scholar] [CrossRef]
- Fontes, R.M.; Santana, D.D.; Martins, M.A. An MPC auto-tuning framework for tracking economic goals of an ESP-lifted oil well. J. Pet. Sci. Eng. 2022, 217, 110867. [Google Scholar]
- Iranzi, J.; Son, H.; Lee, Y.; Wang, J. A Nodal Analysis Based Monitoring of an Electric Submersible Pump Operation in Multiphase Flow. Appl. Sci. 2022, 12, 2825. [Google Scholar] [CrossRef]
- Ilyushin, P.Y.; Vyatkin, K.A.; Kozlov, A.V. Development and verification of a software module for predicting the distribution of wax deposition in an oil well based on laboratory studies. Results Eng. 2022, 16, 100697. [Google Scholar] [CrossRef]
- Lekomtsev, A.; Kozlov, A.; Kang, W.; Dengaev, A. Designing of a washing composition model to conduct the hot flushing wells producing paraffin crude oil. J. Pet. Sci. Eng. 2022, 217, 110923. [Google Scholar] [CrossRef]
- Goodarzi, F.; Zendehboudi, S. A comprehensive review on emulsions and emulsion stability in chemical and energy industries. Can. J. Chem. Eng. 2019, 97, 281–309. [Google Scholar]
- Ali, N.; Bilal, M.; Khan, A.; Ali, F.; Ibrahim, M.N.M.; Gao, X.; Iqbal, H.M. Engineered hybrid materials with smart surfaces for effective mitigation of petroleum-originated pollutants. Engineering 2021, 7, 1492–1503. [Google Scholar]
- Bulgarelli, N.A.V.; Biazussi, J.L.; Verde, W.M.; Perles, C.E.; de Castro, M.S.; Bannwart, A.C. Experimental investigation on the performance of Electrical Submersible Pump (ESP) operating with unstable water/oil emulsions. J. Pet. Sci. Eng. 2021, 197, 107900. [Google Scholar]
- Bulgarelli, N.A.V.; Biazussi, J.L.; Verde, W.M.; Perles, C.E.; de Castro, M.S.; Bannwart, A.C. Relative viscosity model for oil/water stable emulsion flow within electrical submersible pumps. Chem. Eng. Sci. 2021, 245, 116827. [Google Scholar] [CrossRef]
- Faisal, W.; Almomani, F. A critical review of the development and demulsification processes applied for oil recovery from oil in water emulsions. Chemosphere 2022, 291, 133099. [Google Scholar] [CrossRef]
- Ma, J.; Yao, M.; Yang, Y.; Zhang, X. Comprehensive review on stability and demulsification of unconventional heavy oil-water emulsions. J. Mol. Liq. 2022, 350, 118510. [Google Scholar] [CrossRef]
- Jia, A.; Guo, J. Key technologies and understandings on the construction of Smart Fields. Pet. Explor. Dev. 2012, 39, 127–131. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Y.; Peng, Y.; Shen, Z.; Zhang, W.; Wang, M. Study of the Intelligent Completion System for Liaohe Oil Field. Procedia Eng. 2011, 15, 739–746. [Google Scholar]
- Garin, T.; Arfib, B.; Ladouche, B.; Goncalves, J.; Dewandel, B. Improving hydrogeological understanding through well-test interpretation by diagnostic plot and modelling: A case study in an alluvial aquifer in France. Hydrogeol. J. 2022, 30, 283–302. [Google Scholar] [CrossRef]
- Sharaf, E.F.; Sheikha, H. Reservoir characterization and production history matching of Lower Cretaceous, Muddy Formation in Ranch Creek area, Bell Creek oil field, Southeastern Montana, USA. Mar. Pet. Geol. 2021, 127, 104996. [Google Scholar]
- Elmer, W.G.; Elmer, J.B. Pump-stroke optimization: Case study of twenty-well pilot. SPE Prod. Oper. 2018, 33, 419–436. [Google Scholar] [CrossRef]
- Garifullin, A.R.; Slivka, P.I.; Gabdulov, R.R.; Davletbaev, R.V.; Baiburin, B.K.; Kliushin, I.G. “Smart Wells”"System of Automated Control Over Oil and Gas Production. Oil. Gas. Innov. 2017, 12, 24–32. [Google Scholar]
- Zubairov, I.F. Intelligent well–improving the efficiency of mechanized production. Autom. Telemech. Commun. Oil Ind. 2013, 3, 25–32. [Google Scholar]
- Kuang, L. Application and development trend of artificial intelligence in petroleum exploration and development. Pet. Explor. Dev. 2021, 48, 1–14. [Google Scholar] [CrossRef]
- Wan, J. Intelligent equipment design assisted by Cognitive Internet of Things and industrial big data. Neural Comput. Appl. 2020, 32, 4463–4472. [Google Scholar]
- Krishnamoorthy, D. Modelling and robustness analysis of model predictive control for electrical submersible pump lifted heavy oil wells. IFAC-PapersOnLine 2016, 49, 544–549. [Google Scholar] [CrossRef]
- Guo, B.; Lyons, W.; Ghalambor, A. Petroleum Production Engineering. A Computer-Assisted Approach; Gulf Professional Publishing: Houston, TX, USA, 2007; p. 287. [Google Scholar]
- Takacs, G. Electrical Submersible Pumps Manual: Design, Operations, and Maintenance; Gulf Professional Publishing: Houston, TX, USA, 2009; p. 440. [Google Scholar]
- Petrochenkov, A.B.; Mishurinskikh, S.V. Development of a Method for Optimizing Power Consumption of an Electric Driven Centrifugal Pump. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 26–29 January 2021; pp. 1520–1524. [Google Scholar] [CrossRef]
- Delou PD, A.; de Azevedo, J.P.; Krishnamoorthy, D.; de Souza, M.B., Jr.; Secchi, A.R. Model predictive control with adaptive strategy applied to an electric submersible pump in a subsea environment. IFAC-PapersOnLine 2019, 52, 784–789. [Google Scholar] [CrossRef]
- Cavone, G.; Bozza, A.; Carli, R.; Dotoli, M. MPC-Based Process Control of Deep Drawing: An Industry 4.0 Case Study in Automotive. IEEE Trans. Autom. Sci. Eng. 2022, 19, 1586–1598. [Google Scholar]
- Hagedorn, A.R.; Brown, K.E. Experimental study of pressure gradients occurring during continuous two-phase flow in small-diameter vertical conduits. J. Pet. Technol. 1965, 17, 475–484. [Google Scholar] [CrossRef]
- Economides, M.; Hill, A.; Ehlig-Economides, C.; Zhu, D. Petroleum Production Systems; Pearson Education: London, UK, 2013; p. 194. [Google Scholar]
- Guo, B.; Ghalambor, A. Natural Gas Engineering Handbook; Gulf Professional Publishing: Houston, TX, USA, 2014; p. 690. [Google Scholar]
- Lyakhomskii, A.; Petrochenkov, A.; Romodin, A.; Perfil’eva, E.; Mishurinskikh, S.; Kokorev, A.; Kokorev, A.; Zuev, S. Assessment of the Harmonics Influence on the Power Consumption of an Electric Submersible Pump Installation. Energies 2022, 15, 2409. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Gagliano, S. Imperfections in integrated devices allow the emergence of unexpected strange attractors in electronic circuits. IEEE Access 2021, 9, 29573–29583. [Google Scholar] [CrossRef]
- Ivanovskiy, V.; Darishchev, V.; Sabirov, A.; Kashtanov, V.; Pekin, S. Skvazhinnye Nasosnye Ustanovki Dlya Dobychi Nefti [Downhole Pumping Units for Oil Production]; GUP «Neft’ i gaz» RGU nefti i gaza im. I. M.; Gubkina Publishing: Moscow, Russia, 2002; p. 824. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Equipment | Parameter | Well | |
|---|---|---|---|
| 1 | 2 | ||
| Pump | Qnp, m3/day | 80 | 80 |
| Qmax, m3/day | 151.4 | 151.4 | |
| SEM | PSEMnp, kW | 32 | 40 |
| USEMnp, V | 1000 | 1300 | |
| cos φSEMnp, p.u. | 0.85 | 0.85 | |
| ηSEMnp,% | 84 | 91.5 | |
| Inp,A | 24.2 | 24 | |
| CL | r0, Ohm/km | 2.1 | 2.1 |
| x0, Ohm/km | 0.1 | 0.1 | |
| L, km | 1.39 | 1.33 | |
| T | ΔPI, kW | 0.55 | 0.55 |
| ΔPSC, kW | 2.6 | 2.6 | |
| STnp, kVA | 100 | 100 | |
| CS | ηCSnp, p.u. | 0.97 | 0.97 |
| Parameter | Value | ||||
|---|---|---|---|---|---|
| i | 4 | 3 | 2 | 1 | 0 |
| ηpump | 0.000104 | 0.90676 | 0.14863 | 0.14755 | −1.2593 |
| PHC | 3.02E-06 | −0.00124 | 0.07774 | −1.14269 | 1132.1 |
| Mode | Parameter | Well | |
|---|---|---|---|
| 1 | 2 | ||
| Constant parameters | B, p.u. | 1.06 | 1.06 |
| ρfl, kg/m3 | 923 | 923 | |
| Hdyn, m | 915 | 827 | |
| dt, mm | 62 | 62 | |
| Initial mode | QESP, m3/day | 71.3 | 74.4 |
| Pline, MPa | 1.35 | 0.95 | |
| PWH, MPa | 1.5 | 1.1 | |
| f, Hz | 47 | 50 | |
| dch, mm | 8 | 8 | |
| Demulsifier | Without using demulsifier, Pa∙s | 0.0711 | 0.0711 |
| Using demulsifier, Pa∙s | 0.0569 | 0.0569 | |
| Choke control | QESP, m3/day | 67 | 70 |
| PWH, MPa | 1.76 | 1.25 | |
| f, Hz | 47 | 50 | |
| dch, mm | 6 | 6 | |
| Frequency control | QESP, m3/day | 67 | 70 |
| PWH, MPa | 1.46 | 1.08 | |
| f, Hz | 46.4 | 49.5 | |
| dch, mm | 8 | 8 | |
| Combined control | QESP, m3/day | 67 | 70 |
| PWH, MPa | 1.36 | 0.96 | |
| f, Hz | 46.2 | 49.3 | |
| dch, mm | 15 | 15 | |
| Parameter | Well | |
|---|---|---|
| 1 | 2 | |
| Wsp (calculation), kW∙h/m3 | 11.03 | 8.16 |
| Wsp (measurement), kW∙h/m3 | 10.77 | 8.33 |
| Error, % | −2.39 | 2.03 |
| Parameter | CC wUD | CC UD | FC wUD | FC UD | ComC wUD | ComC UD |
|---|---|---|---|---|---|---|
| PWH, MPa | 1.76/1.25 | 1.76/1.25 | 1.46/1.08 | 1.46/1.08 | 1.36/0.96 | 1.36/0.96 |
| Kην, p.u. | 0.767/0.767 | 0.805/0.805 | 0.767/0.767 | 0.805/0.805 | 0.767/0.767 | 0.805/0.805 |
| ηpump, p.u. | 0.337/0.418 | 0.353/0.438 | 0.341/0.422 | 0.357/0.443 | 0.342/0.424 | 0.359/0.445 |
| Ppump, kW | 23.15/16.95 | 22.06/16.15 | 22.18/16.46 | 21.17/15.69 | 21.84/16.16 | 20.81/15.4 |
| ηESM, p.u. | 0.847/0.793 | 0.847/0.782 | 0.847/0.787 | 0.846/0.775 | 0.846/0.782 | 0.845/0.77 |
| IESM, A | 20/14.3 | 19.1/14 | 19.5/14.2 | 18.6/14 | 19.3/14.2 | 18.4/14 |
| ΔPSEM, kW | 4.18/4.41 | 4/4.5 | 4.02/4.46 | 3.86/4.56 | 3.96/4.5 | 3.81/4.6 |
| ΔPCL, kW | 3.82/1.84 | 3.47/1.77 | 3.6/1.84 | 3.28/1.77 | 3.53/1.82 | 3.21/1.76 |
| ΔPT, kW | 0.86/0.75 | 0.83/0.73 | 0.82/0.73 | 0.79/0.72 | 0.81/0.72 | 0.78/0.71 |
| ΔPCS, kW | 0.96/0.72 | 0.91/0.69 | 0.92/0.7 | 0.87/0.68 | 0.9/0.7 | 0.86/0.67 |
| PESPI, kW | 32.97/24.67 | 31.27/23.85 | 31.54/24.2 | 29.99/23.42 | 31.05/23.91 | 29.47/23.15 |
| Use of a Demulsifier | Wsp, kW∙h/m3 | ||
|---|---|---|---|
| CC | FC | ComC | |
| Well 1 | |||
| wUD | 11.81 | 11.30 | 11.12 |
| UD | 11.20 | 10.74 | 10.56 |
| Well 2 | |||
| wUD | 8.46 | 8.30 | 8.20 |
| UD | 8.18 | 8.03 | 7.94 |
| CC wUD | CC UD | FC wUD | FC UD | ComC wUD | ComC UD | |
|---|---|---|---|---|---|---|
| CC wUD | 0/0 | 5.17/3.34 | 4.34/1.92 | 9.05/5.09 | 5.83/3.11 | 10.61/6.17 |
| CC UD | - | 0/0 | −0.87/−1.47 | 4.1/1.81 | 0.7/−0.24 | 5.74/2.93 |
| FC wUD | - | - | 0/0 | 4.93/3.23 | 1.56/1.21 | 6.56/4.34 |
| FC UD | - | - | - | 0/0 | −3.54/−2.08 | 1.72/1.14 |
| ComC wUD | - | - | - | - | 0/0 | 5.08/3.16 |
| ComC UD | - | - | - | - | - | 0/0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrochenkov, A.; Ilyushin, P.; Mishurinskikh, S.; Kozlov, A. Development of a Method for Improving the Energy Efficiency of Oil Production with an Electrical Submersible Pump. Inventions 2023, 8, 29. https://doi.org/10.3390/inventions8010029
Petrochenkov A, Ilyushin P, Mishurinskikh S, Kozlov A. Development of a Method for Improving the Energy Efficiency of Oil Production with an Electrical Submersible Pump. Inventions. 2023; 8(1):29. https://doi.org/10.3390/inventions8010029
Chicago/Turabian StylePetrochenkov, Anton, Pavel Ilyushin, Sergey Mishurinskikh, and Anton Kozlov. 2023. "Development of a Method for Improving the Energy Efficiency of Oil Production with an Electrical Submersible Pump" Inventions 8, no. 1: 29. https://doi.org/10.3390/inventions8010029