
QFD and SDE Methods Applied to Autonomous Minibus Redesign and an Innovative Mobile Charging System (MBS)

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Environmental Analysis
3. Infrastructures and Competing Concepts
4. Materials and Methods
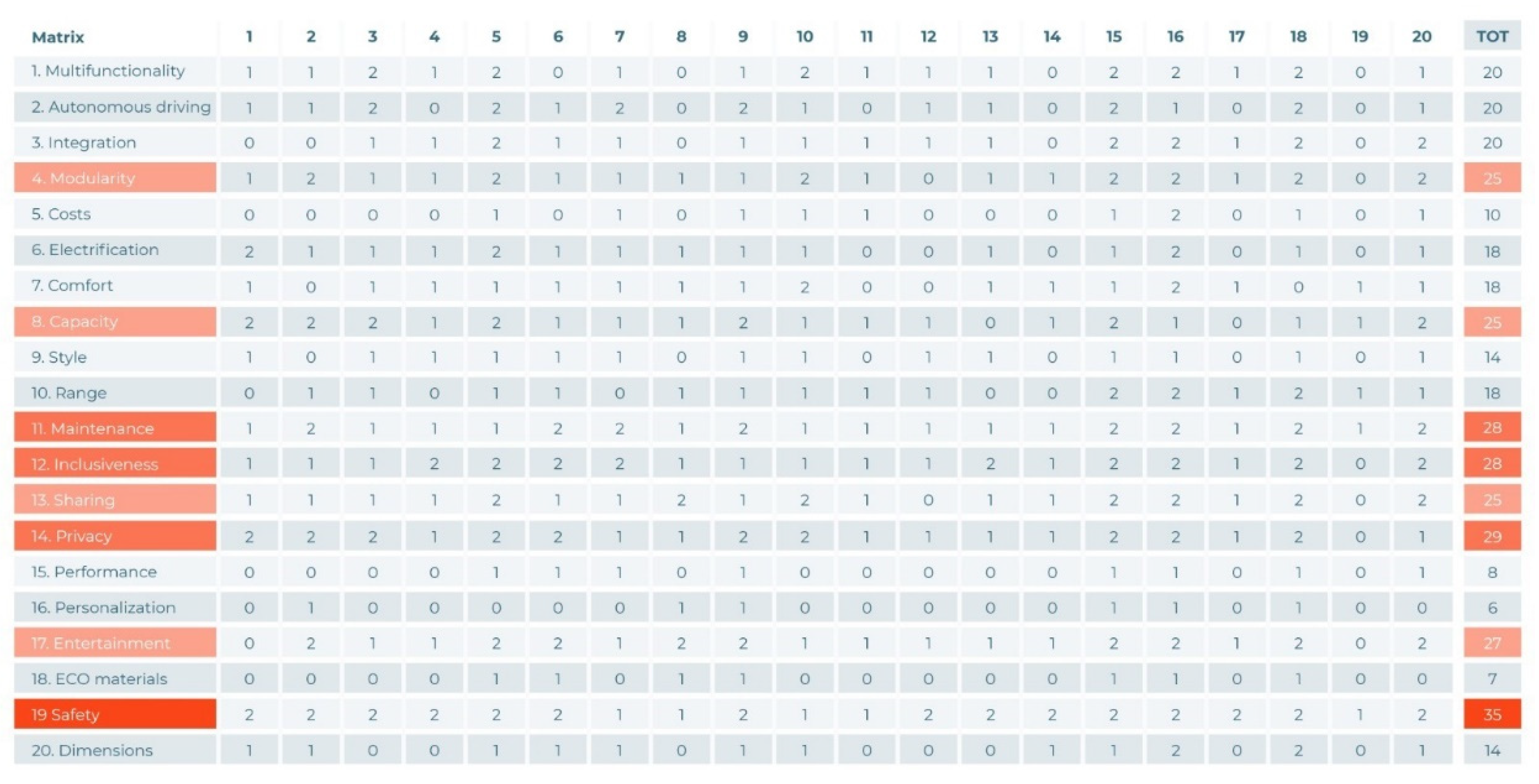
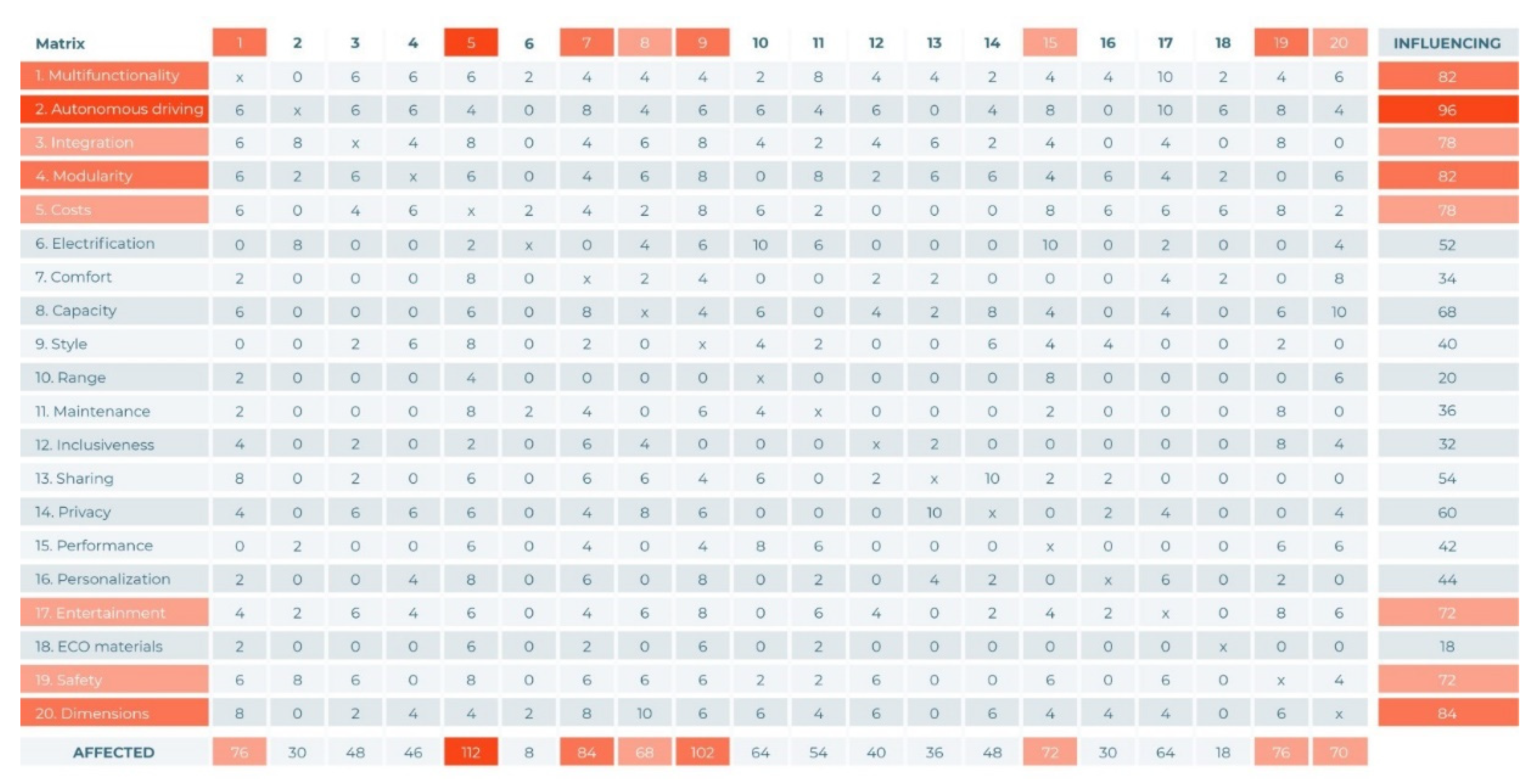
4.1. Application of the QFD Method
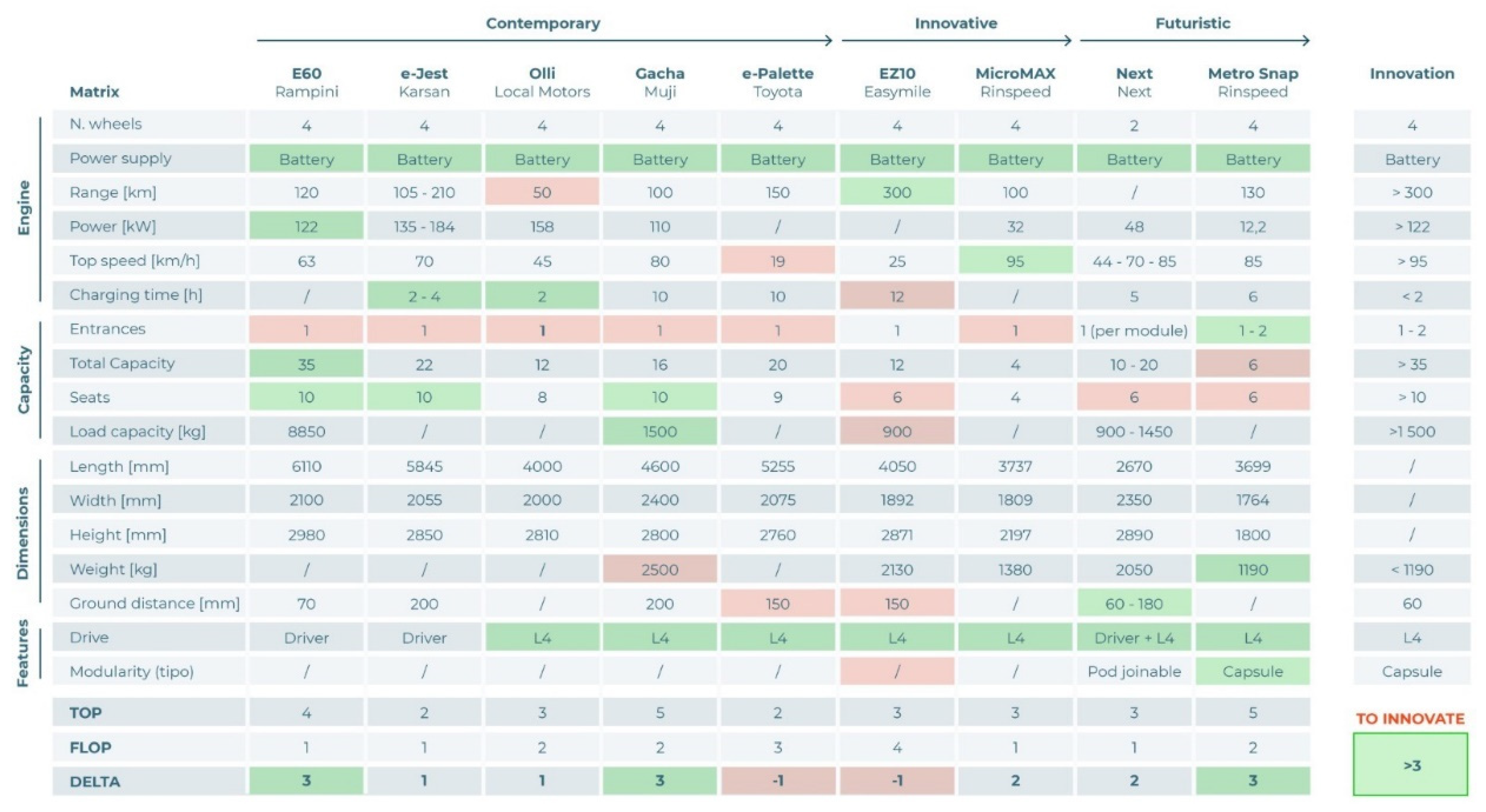
Benchmarking and Top-Flop Analysis
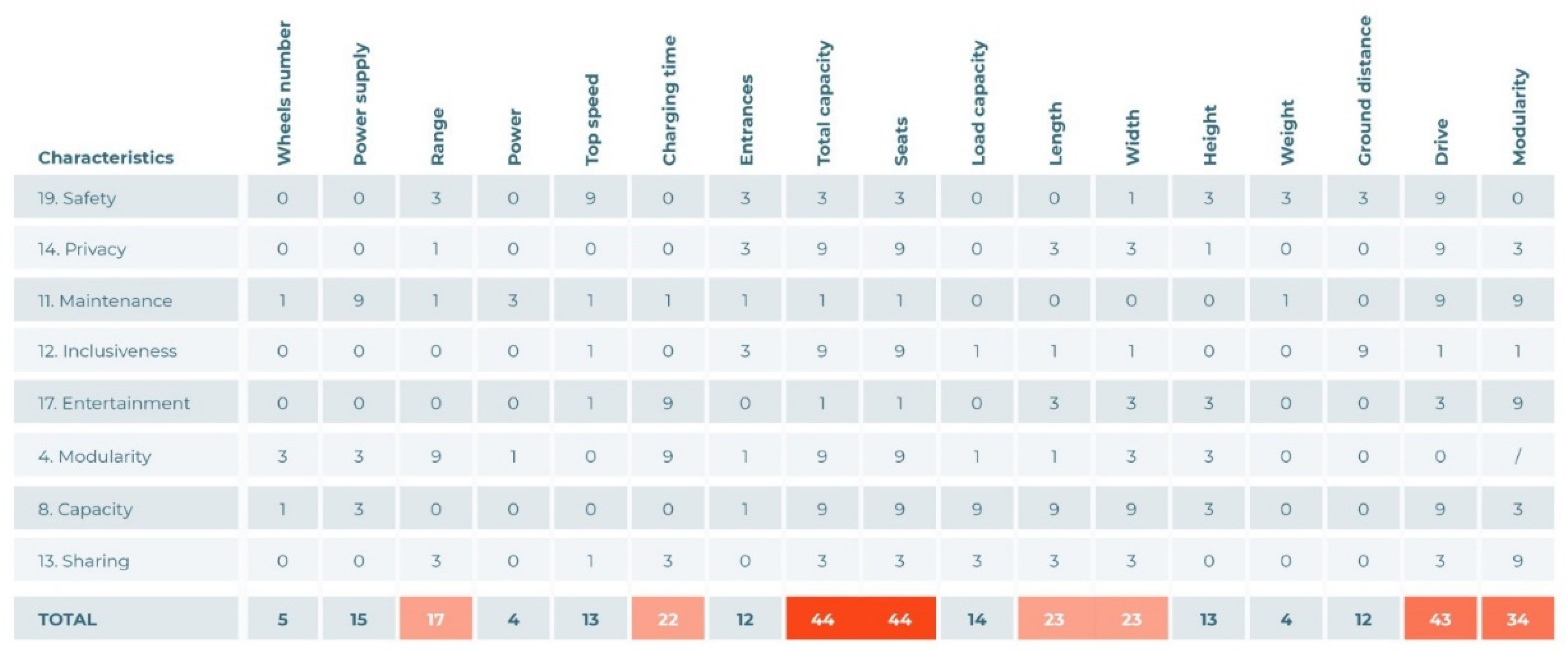
4.2. Technical Requirements
4.3. Other Auxiliaries
4.4. SDE
5. Results
5.1. Interior Layout
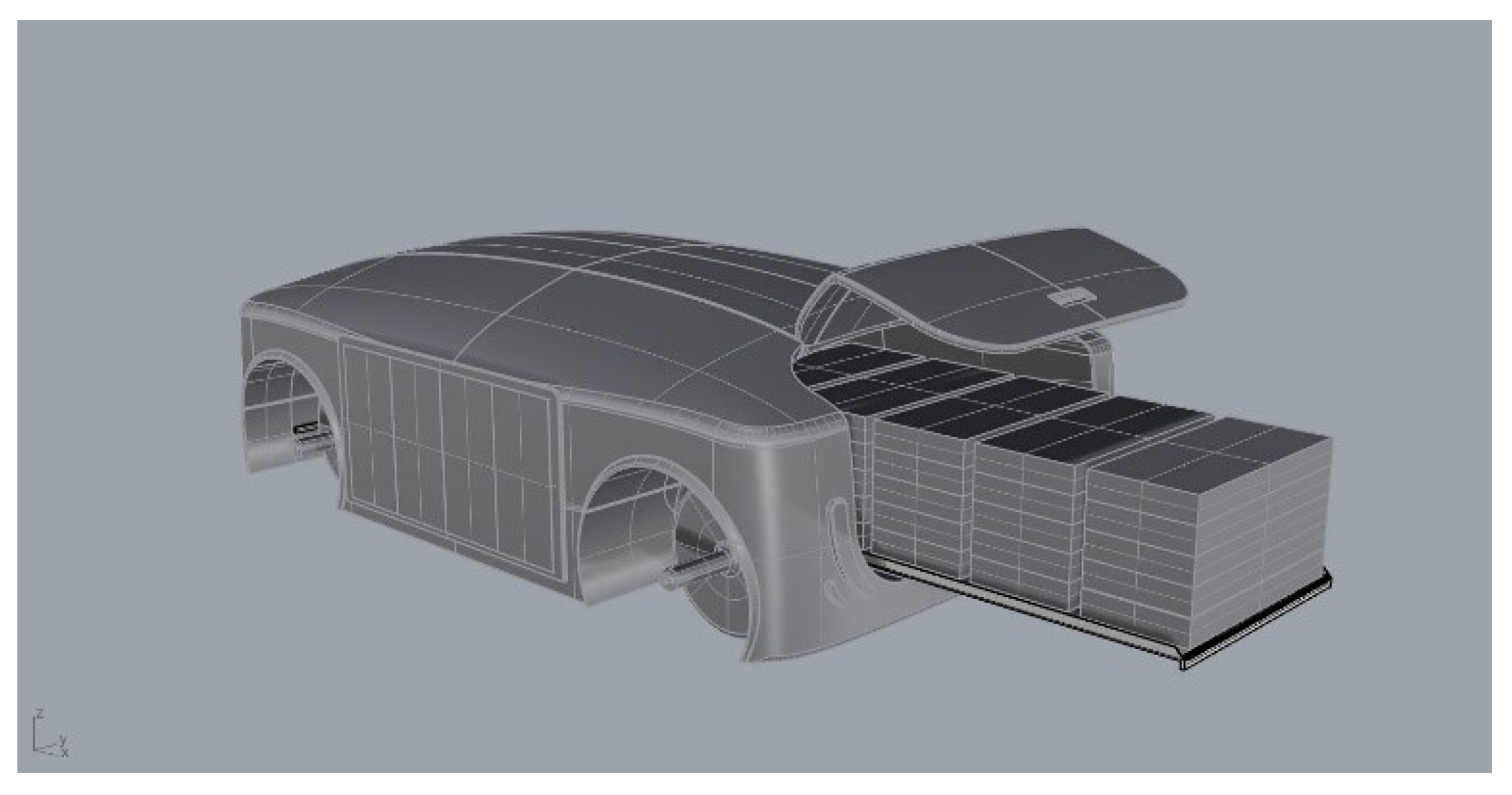
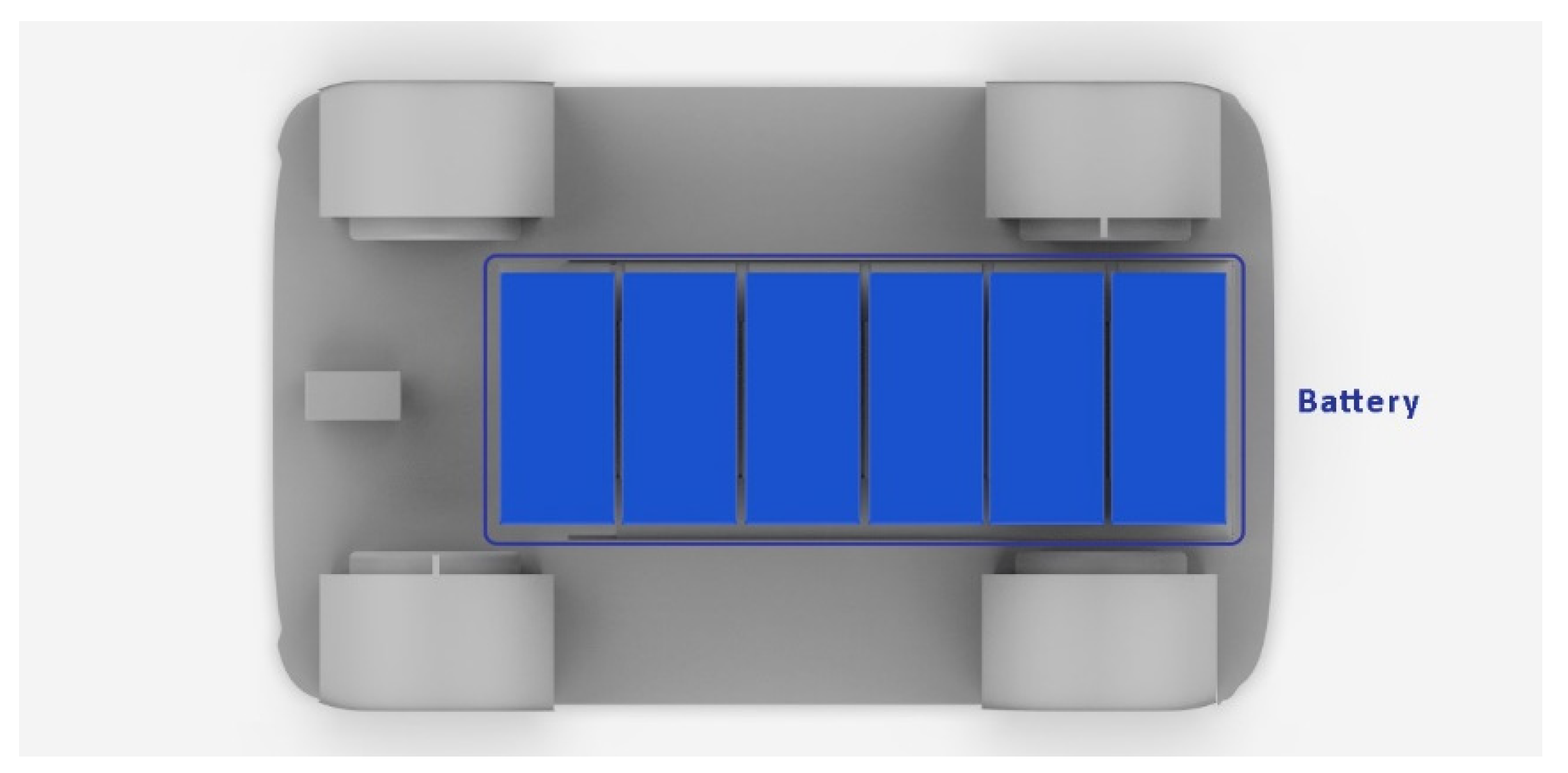
5.2. MBS (Mobile Battery System)
6. Conclusions and Future Development
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Environment Agency. A Closer Look at Urban Transport: TERM 2013: Transport Indicators Tracking Progress Towards Environmental Targets in Europe; Publications Office of the European Union: Luxembourg, 2013. [Google Scholar]
- Miskolczi, M.; Földes, D.; Munkácsy, A.; Jászberényi, M. Urban mobility scenarios until the 2030s. Sustain. Cities Soc. 2021, 72, 103029. [Google Scholar] [CrossRef]
- Enoch, M.P.; Cross, R.; Potter, N.; Davidson, C.; Taylor, S.; Brown, R.; Huang, H.; Parsons, J.; Tucker, S.; Wynne, E.; et al. Future local passenger transport system scenarios and implications for policy and practice. Transp. Policy 2020, 90, 52–67. [Google Scholar] [CrossRef]
- Rüdisüli, M.; Bach, C.; Bauer, C.; Beloin-Saint-Pierre, D.; Elber, U.; Georges, G.; Limpach, R.; Pareschi, G.; Kannan, R.; Teske, S.L. Prospective life-cycle assessment of greenhouse gas emissions of electricity-based mobility options. Appl. Energy 2022, 306, 118065. [Google Scholar] [CrossRef]
- Manzolli, J.A.; Trovão, J.P.; Antunes, C.H. A review of electric bus vehicles research topics–Methods and trends. Renew. Sustain. Energy Rev. 2022, 159, 112211. [Google Scholar] [CrossRef]
- Vilaça, M.; Santos, G.; Oliveira, M.S.; Coelho, M.C.; Correia, G.H. Life cycle assessment of shared and private use of automated and electric vehicles on interurban mobility. Appl. Energy 2022, 310, 118589. [Google Scholar] [CrossRef]
- Silva, Ó.; Cordera, R.; González-González, E.; Nogués, S. Environmental impacts of autonomous vehicles: A review of the scientific literature. Sci. Total Environ. 2022, 830, 154615. [Google Scholar] [CrossRef]
- Jefferies, D.; Göhlich, D. A comprehensive TCO evaluation method for electric bus systems based on discrete-event simulation including bus scheduling and charging infrastructure optimisation. World Electr. Veh. J. 2020, 11, 56. [Google Scholar] [CrossRef]
- Palomino, A.; Parvania, M. Advanced charging infrastructure for enabling electrified transportation. Electr. J. 2019, 32, 21–26. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Fast-charging station deployment for battery electric bus systems considering electricity demand charges. Sustain. Cities Soc. 2019, 48, 101530. [Google Scholar] [CrossRef] [Green Version]
- Guschinsky, N.; Kovalyov, M.Y.; Rozin, B.; Brauner, N. Fleet and charging infrastructure decisions for fast-charging city electric bus service. Comput. Oper. Res. 2021, 135, 105449. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Song, Z. Optimal charging scheduling and management for a fast-charging battery electric bus system. Transp. Res. Part E: Logist. Transp. Rev. 2020, 142, 102056. [Google Scholar] [CrossRef]
- Ke, B.R.; Lin, Y.H.; Chen, H.Z.; Fang, S.C. Battery charging and discharging scheduling with demand response for an electric bus public transportation system. Sustain. Energy Technol. Assess. 2020, 40, 100741. [Google Scholar] [CrossRef]
- Moon, J.; Kim, Y.J.; Cheong, T.; Song, S.H. Locating battery swapping stations for a smart e-bus system. Sustainability 2020, 12, 1142. [Google Scholar] [CrossRef] [Green Version]
- Kumar, T.; Kumar, N.; Thakur, T.; Nema, S. Charge scheduling framework with multiaggregator collaboration for direct charging and battery swapping station in a coupled distribution-transportation network. Int. J. Energy Res. 2022, 46, 11139–11162. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Jena, P.; Padhy, N.P. Integration of Battery Swapping Station into Microgrid: A Review. In Proceedings of the 2022 International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), Hyderabad, India, 21–23 July 2022; pp. 1–5. [Google Scholar]
- Ginting, R.; Ishak, A.; Malik, A.F.; Satrio, M.R. Product development with quality function deployment (QFD): A literature review. IOP Conf. Ser. Mater. Sci. Eng. 2020, 1003, 012022. [Google Scholar] [CrossRef]
- Frizziero, L.; Donnici, G.; Liverani, A.; Alessandri, G.; Menozzi, G.C.; Varotti, E. Developing innovative crutch using IDeS (industrial design structure) methodology. Appl. Sci. 2019, 9, 5032. [Google Scholar] [CrossRef] [Green Version]
- Kuipers, M.; Meier, S.; Hust, F.; Sauer, D.U. An In-Depth View into the Tesla Model Smodule Part Two: Module Characterization and Comparison to Other State of the Art EV Battery Systems; No. FZJ-2017-02840; Helmholtz-Institut Münster Ionenleiter für Energiespeicher: Münster, Germany, 2017. [Google Scholar]
- Motors, T. Vehicle Battery Pack Ballistic Shield. U.S. Patent 8286743, 5 December 2012. Available online: http://www.patentlens.net/patentlens/patents.html?patnums=US_8286743 (accessed on 12 September 2022).
- Arora, S.; Kapoor, A. Mechanical Design and Packaging of Battery Packs for Electric Vehicles. In Behaviour of Lithium-ion Batteries in Electric Vehicles; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Basma, H.; Mansour, C.; Haddad, M.; Nemer, M.; Stabat, P. Energy consumption and battery sizing for different types of electric bus service. Energy 2022, 239, 122454. [Google Scholar] [CrossRef]
- Barabás, I.; Todoruţ, A.; Cordoş, N.; Molea, A. Current challenges in autonomous driving. IOP Conf. Ser. Mater. Sci. Eng. 2017, 252, 012096. [Google Scholar] [CrossRef]
- Antony, M.M.; Whenish, R. Advanced Driver Assistance Systems (ADAS). In Automotive Embedded Systems; Kathiresh, M., Neelaveni, R., Eds.; EAI/Springer Innovations in Communication and Computing; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Sankalprajan, P.; Muppidi, A.J.; Pagala, P.S. Analysis of Computational Need of 2D-SLAM Algorithms for Unmanned Ground Vehicle. In Proceedings of the 2020 4th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 13–15 May 2020; pp. 230–235. [Google Scholar]
- Göhlich, D.; Fay, T.; Jefferies, D.; Lauth, E.; Kunith, A.; Zhang, X. Design of urban electric bus systems. Des. Sci. 2018, 4, E15. [Google Scholar] [CrossRef]
- Lu, X.L.; Chen, C.L. The Study on Visual Style Preferences of Automotive Printing Interior Board in Mainland China. In Proceedings of the 2018 International Conference on Mechanical, Electronic and Information Technology (ICMEIT 2018), Qingdao, China, 30–31 March 2018. [Google Scholar]
- Matsuoka, K.; Maedomari, H.; Sato, K.; Terauchi, F. Factorial Structure of Evaluations of Automotive Interior Material Texture. J. Sci. Des. 2019, 3, 1_53–1_60. [Google Scholar]
- Lai, X.; Zhang, S.; Mao, N.; Liu, J.; Chen, Q. Kansei engineering for new energy vehicle exterior design: An internet big data mining approach. Comput. Ind. Eng. 2022, 165, 107913. [Google Scholar] [CrossRef]
- Rauh, R.D. Electrochromic windows: An overview. Electrochim. Acta 1999, 44, 3165–3176. [Google Scholar] [CrossRef]
- Kadav, P.; Asher, Z.D. Improving the Range of Electric Vehicles. In Proceedings of the 2019 Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Chopra, S.; Bauer, P. Driving Range Extension of EV With On-Road Contactless Power Transfer—A Case Study. IEEE Trans. Ind. Electron. 2013, 60, 329–338. [Google Scholar] [CrossRef]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frizziero, L.; Donnici, G.; Galiè, G.; Pala, G.; Pilla, M.; Zamagna, E. QFD and SDE Methods Applied to Autonomous Minibus Redesign and an Innovative Mobile Charging System (MBS). Inventions 2023, 8, 1. https://doi.org/10.3390/inventions8010001
Frizziero L, Donnici G, Galiè G, Pala G, Pilla M, Zamagna E. QFD and SDE Methods Applied to Autonomous Minibus Redesign and an Innovative Mobile Charging System (MBS). Inventions. 2023; 8(1):1. https://doi.org/10.3390/inventions8010001
Chicago/Turabian StyleFrizziero, Leonardo, Giampiero Donnici, Giulio Galiè, Giacomo Pala, Martina Pilla, and Elia Zamagna. 2023. "QFD and SDE Methods Applied to Autonomous Minibus Redesign and an Innovative Mobile Charging System (MBS)" Inventions 8, no. 1: 1. https://doi.org/10.3390/inventions8010001