
Study on Road Friction Database for Traffic Safety: Construction of a Road Friction-Measuring Device
 , ,
, , 
Abstract
:1. Introduction

2. Method to Estimate Road Friction Coefficient
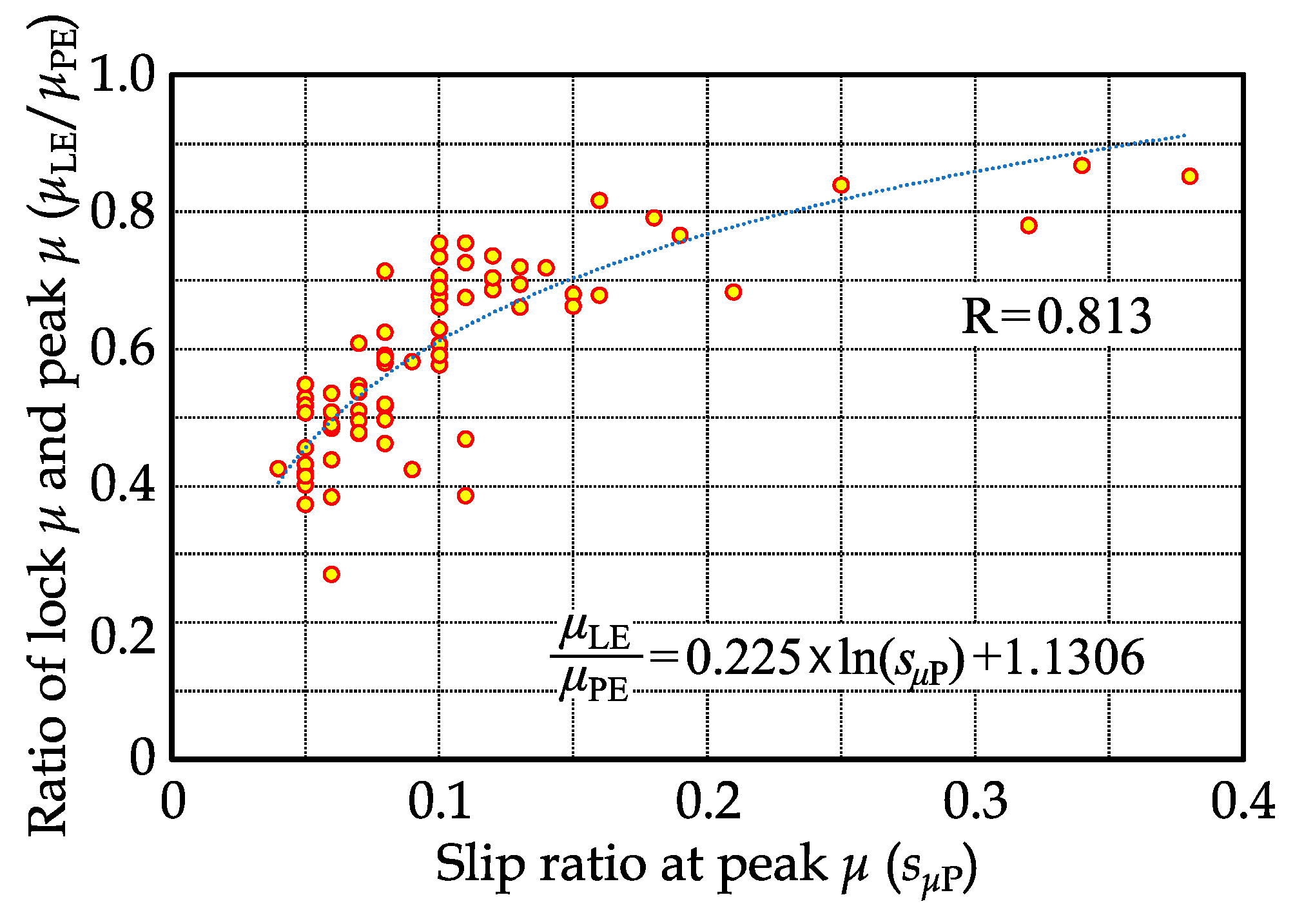
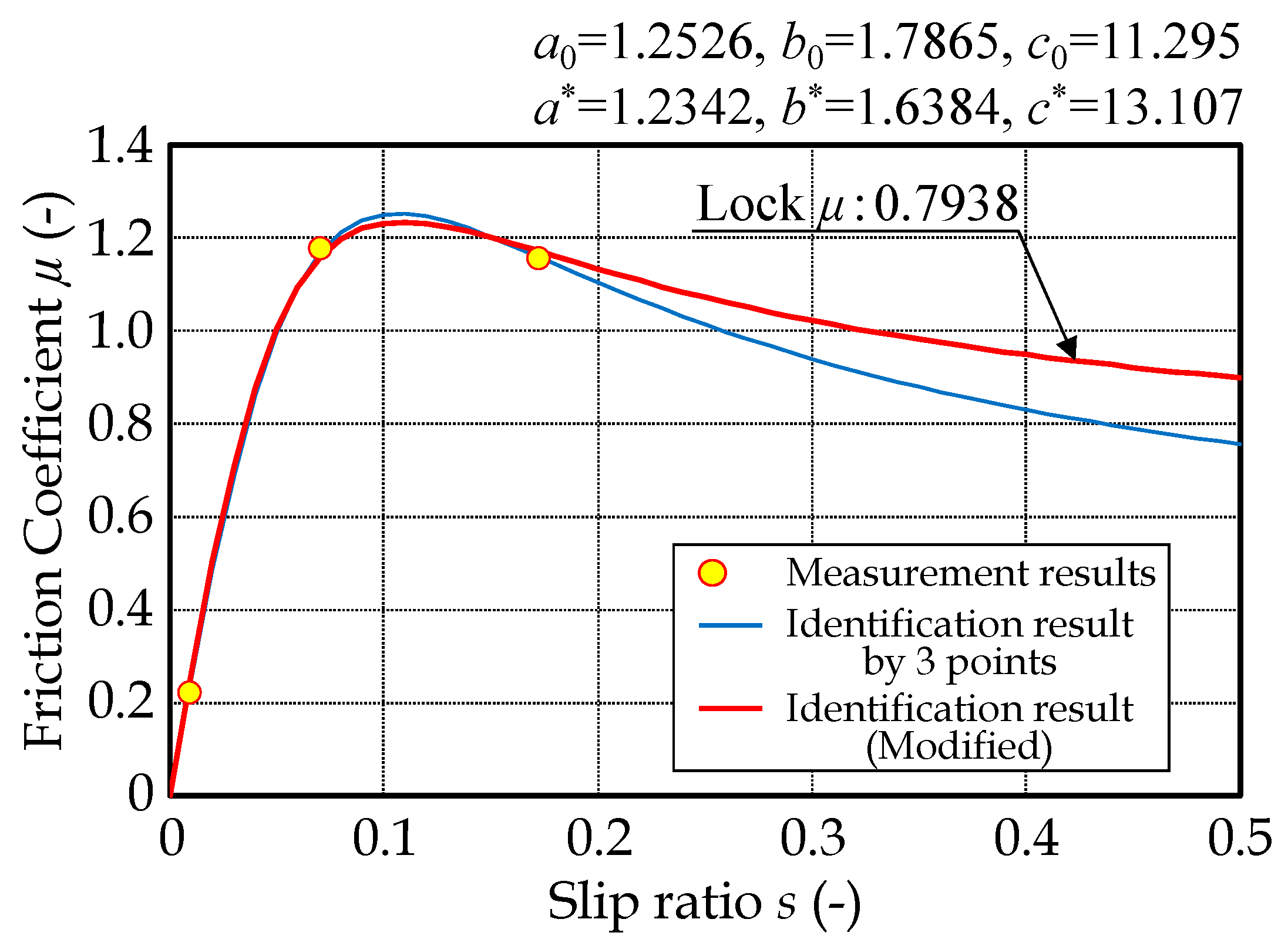
2.1. Identification Algorithm
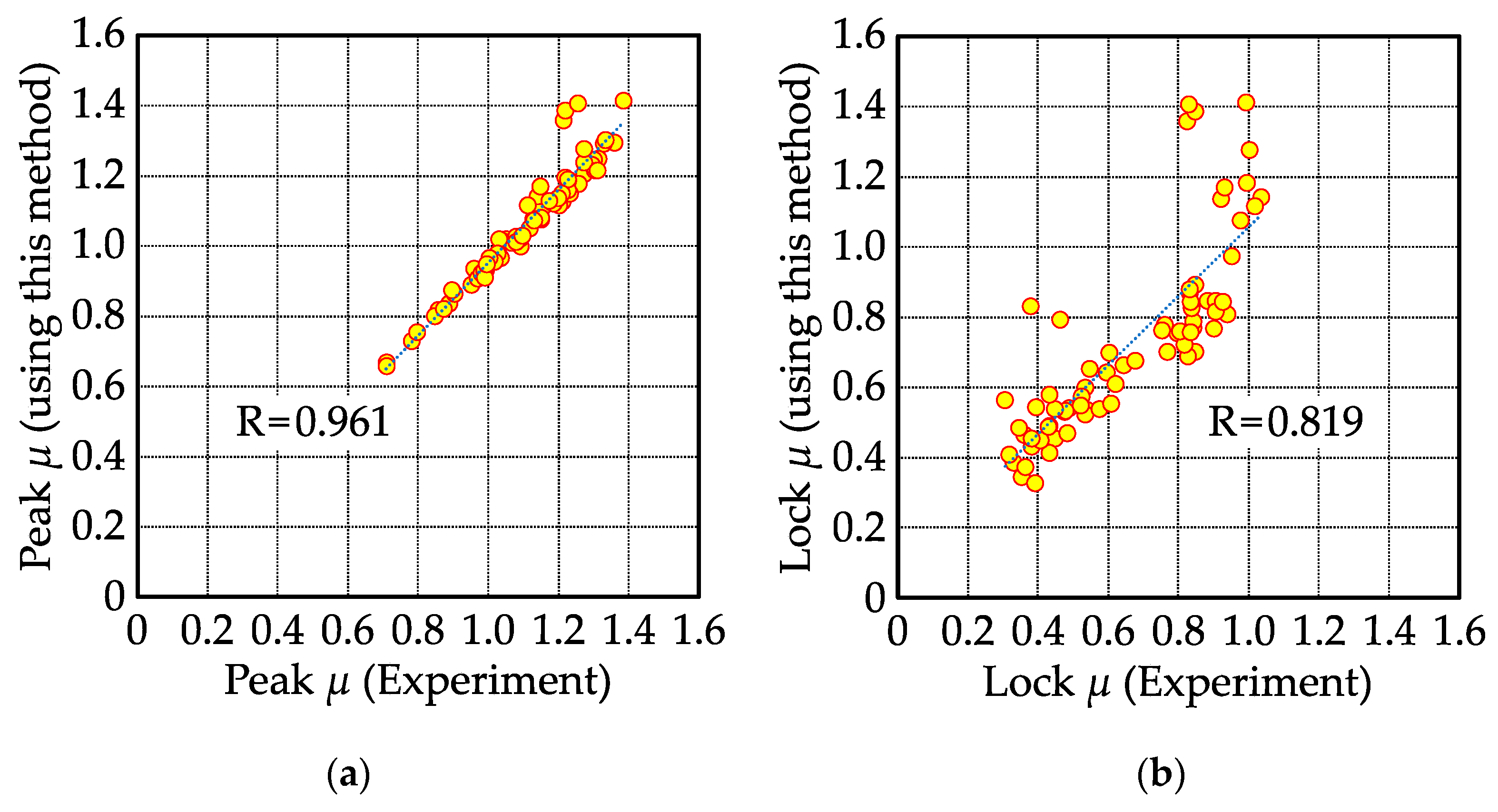
2.2. Verification of the Algorithm
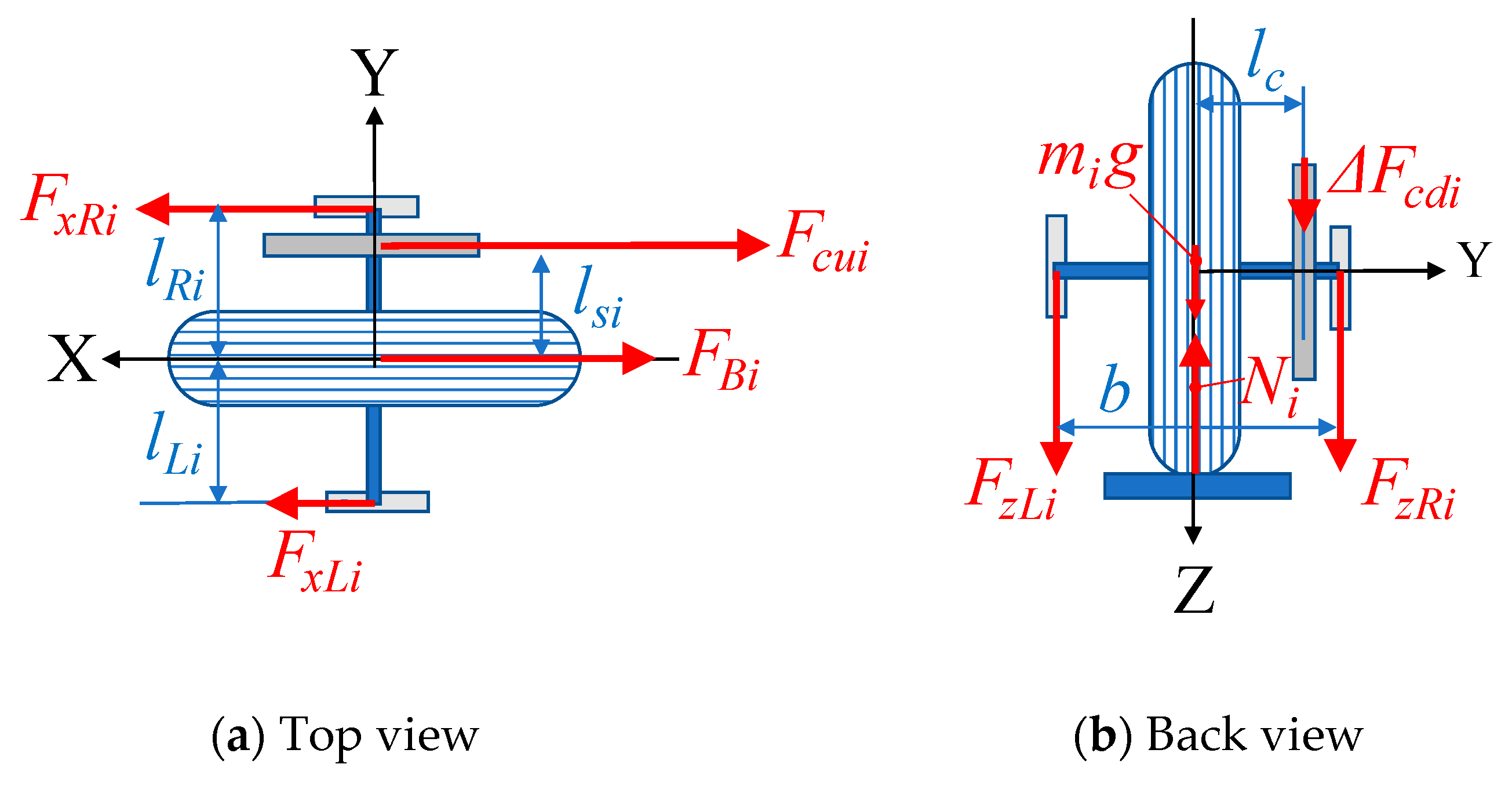
3. Fundamental Design of Measurement Trailer System
3.1. Overview of Measurement System
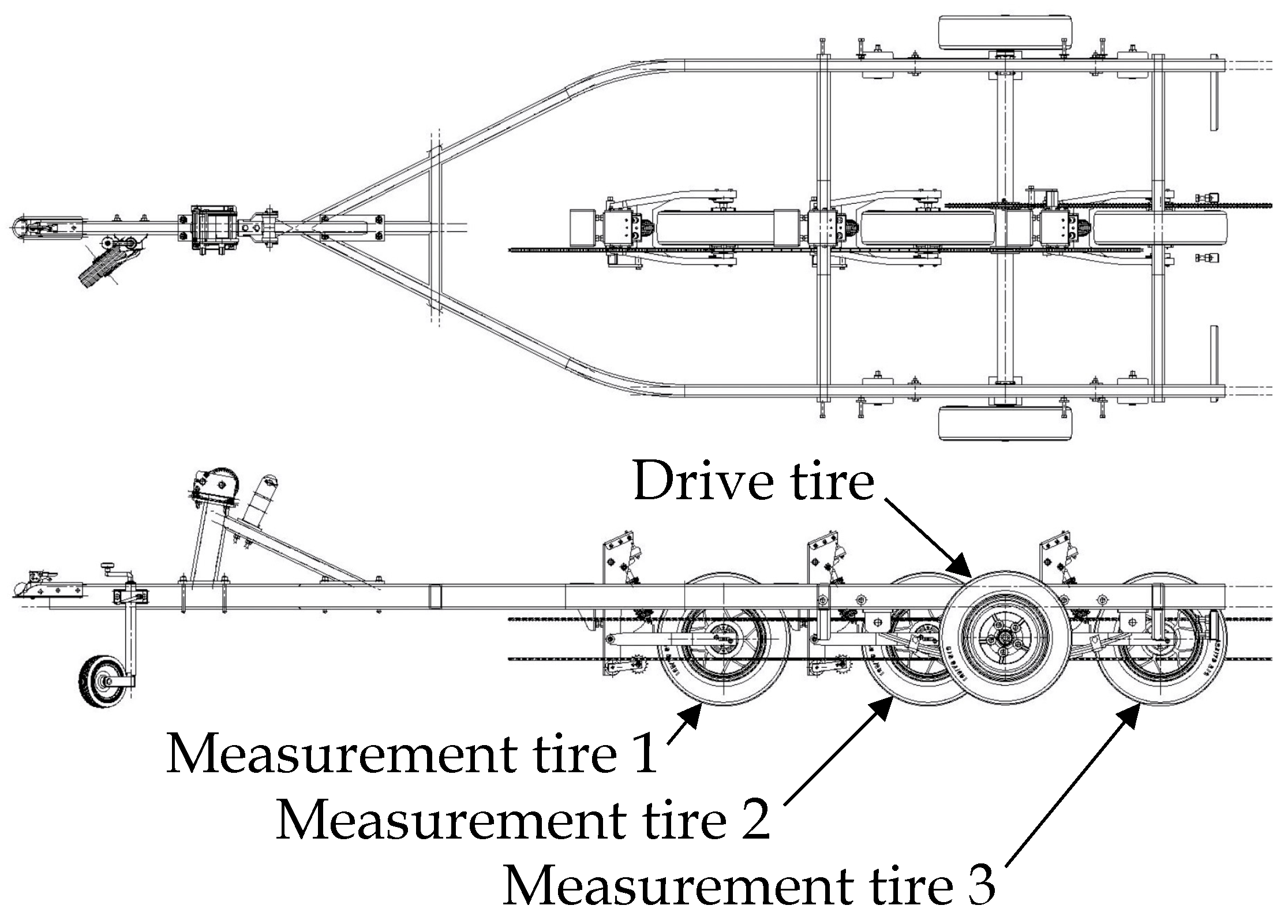
3.2. Determination of Measurement Tire
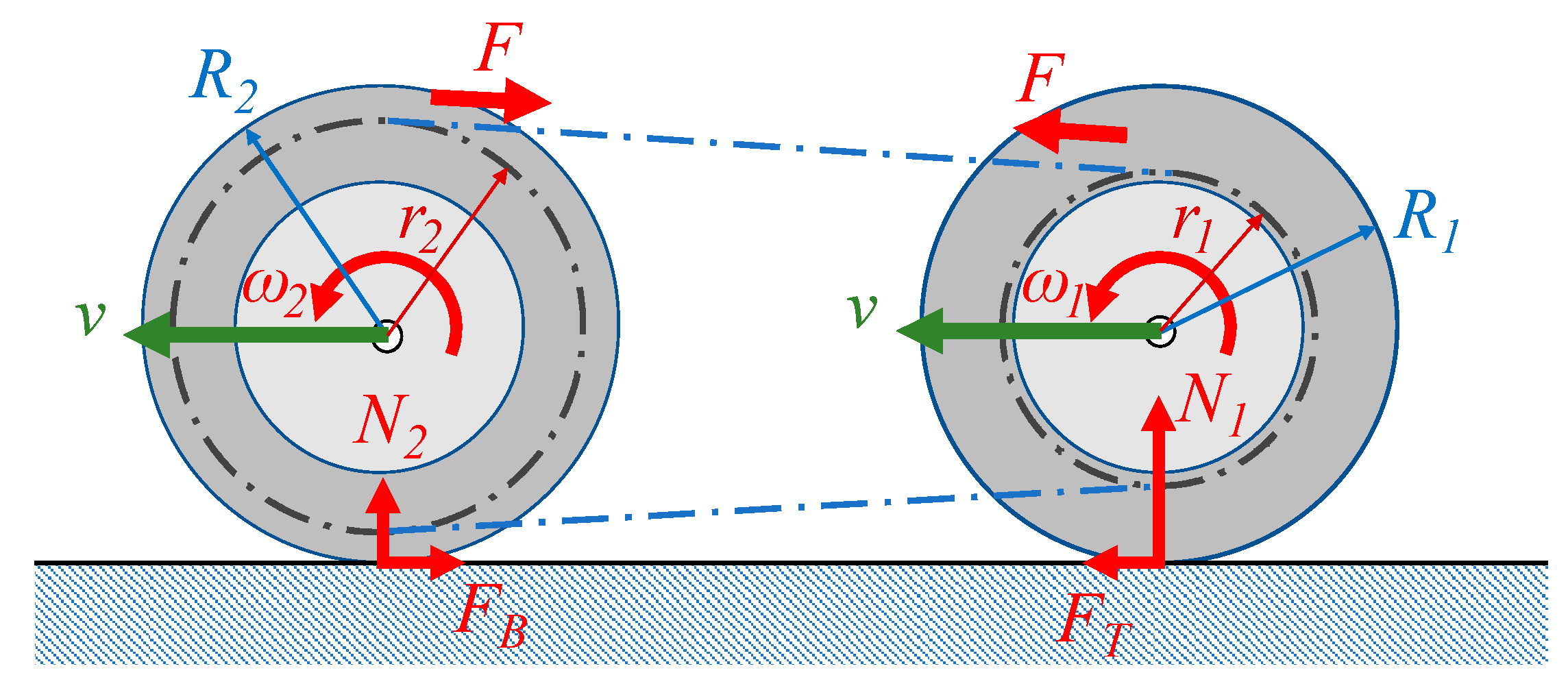
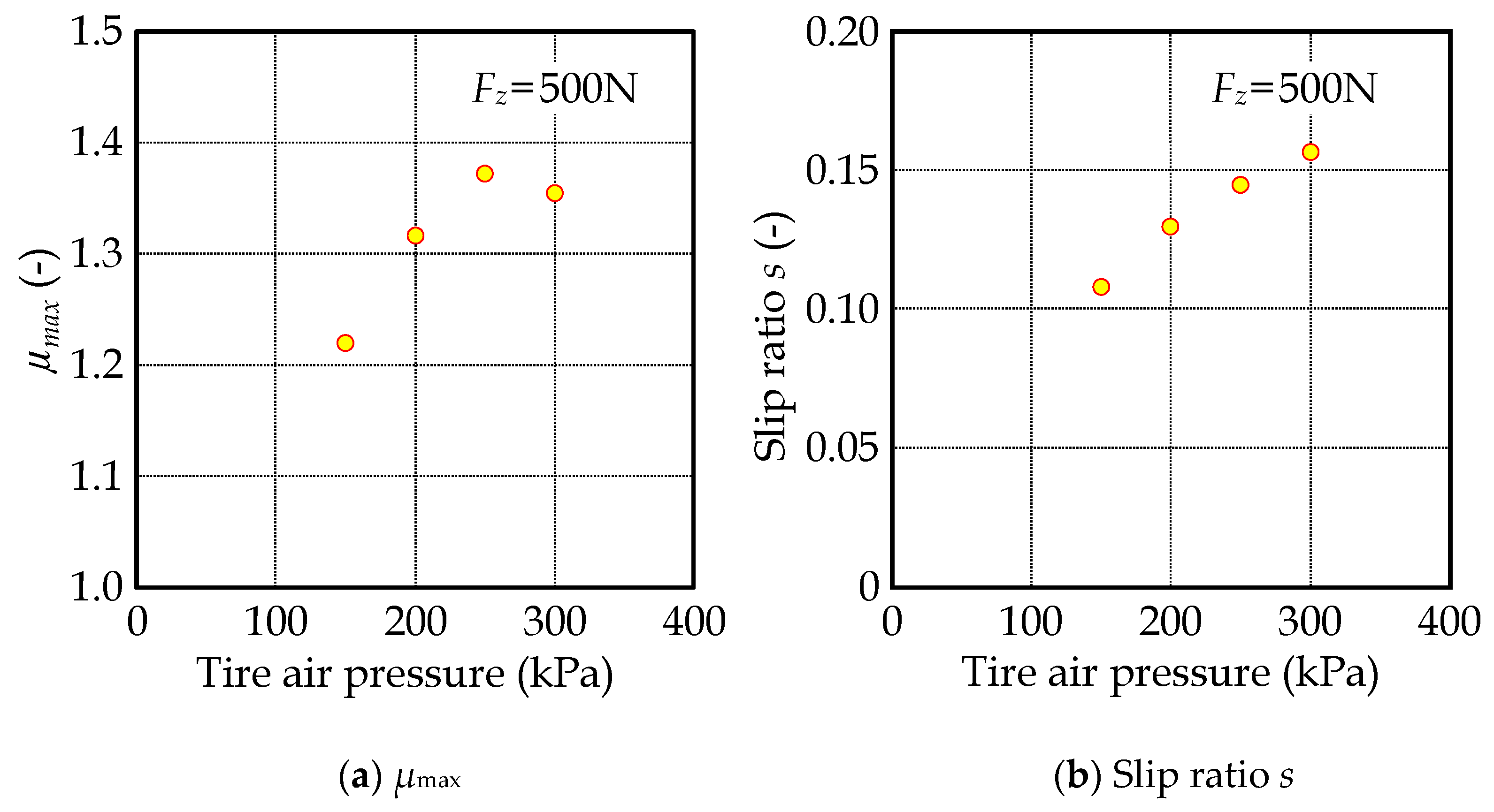
3.3. Determination of tire Setting Conditions
4. Road Friction-Measurement Experiment
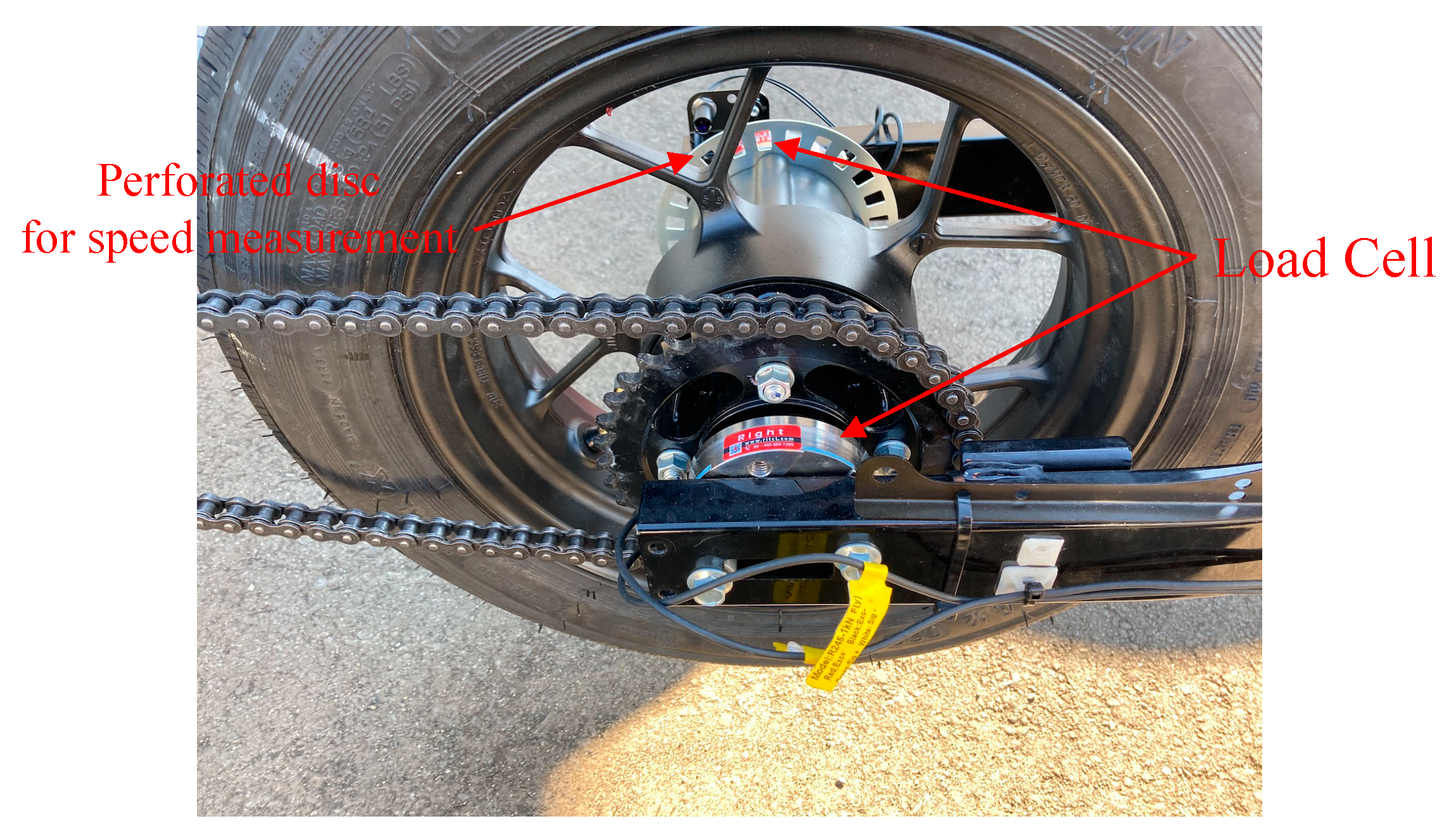
4.1. Constructed Trailer System
4.2. Measurement of Road Friction
5. Conclusions
- (1)
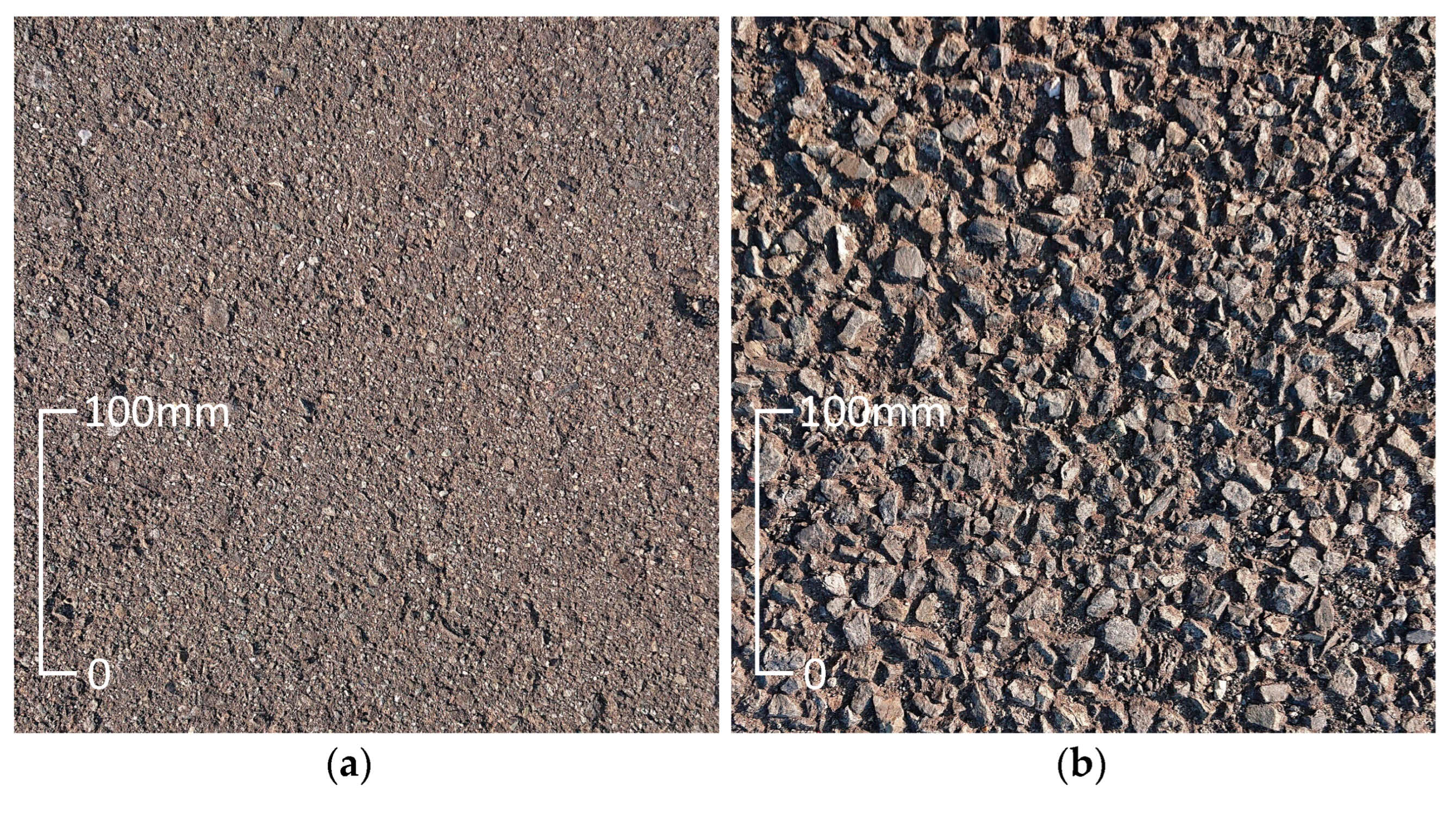
- Characteristic measurements were performed on two types of road surfaces (fine and coarse particle asphalt mixture), and identification results obtained using the MF method and the characteristic modified method using lock μ estimation were shown;
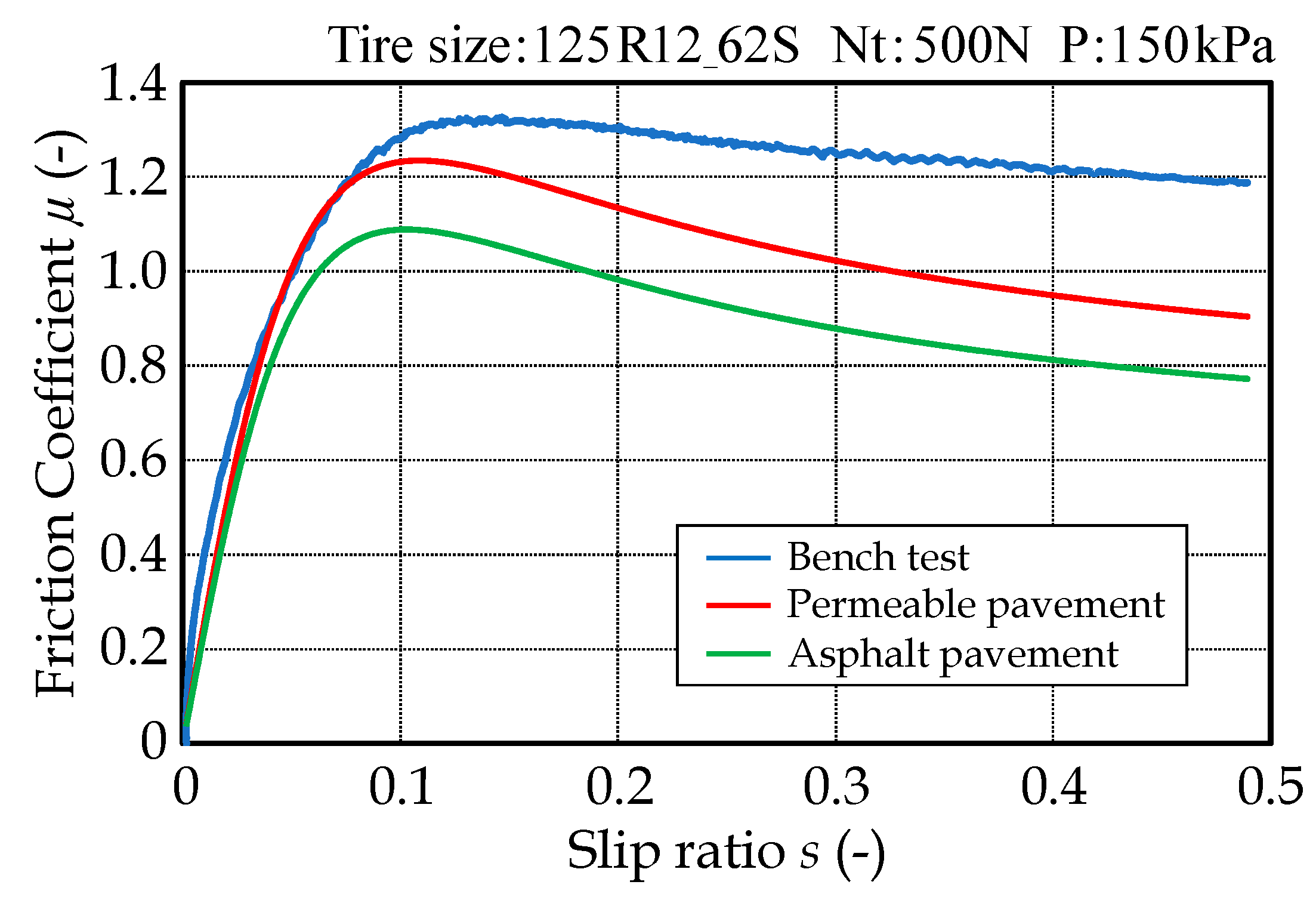
- (2)
- By examining and comparing the results of the friction characteristics of the two types of actual road surfaces and the results of a bench test in three areas, it was confirmed that the aim of the study could be achieved;
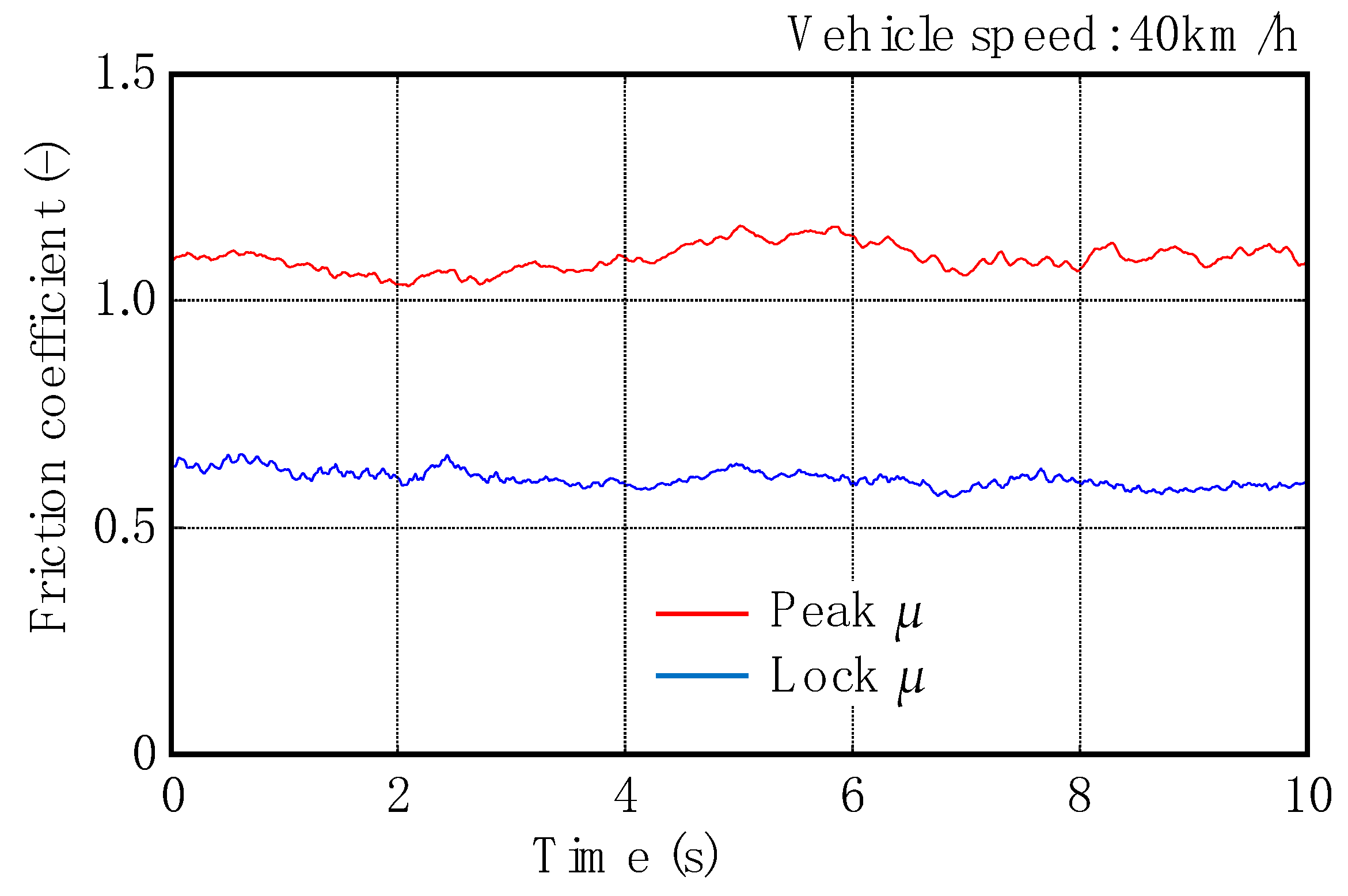
- (3)
- This measurement method could continuously measure μ-s characteristics and an example of the measurement result was shown;
- (4)
- These findings indicate that the proposed method is superior at ensuring vehicle safety compared to existing road friction-measurement methods.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ando, K.; Kuramochi, T. A Consideration on Management Levels of Pavement Friction and Slip Accidents. Civ. Eng. J. 2010, 52, 56–59. (In Japanese) [Google Scholar]
- Wallman, C.-G.; Astrom, H. Friction measurement methods and the correlation between road friction and traffic safety: A literature review. In VTI Meddelande 911A; Swedish National Road and Transport Research Institute: Linköping, Sweden, 2001. [Google Scholar]
- Holzschuher, C.; Choubane, B.; Lee, H.S.; Jackson, N.M. Measuring Friction of Patterned and Textured Pavements: A Comparative Study. Transp. Res. Rec. J. Transp. Res. Board 2010, 2155, 91–98. [Google Scholar] [CrossRef]
- Echaveguren, T.; de Solminihac, H.; Chamorro, A. Long-term behavior model of skid resistance for asphalt roadway surfaces. Can. J. Civ. Eng. 2010, 37, 719–727. [Google Scholar] [CrossRef]
- Echaveguren, T.; de Solminihac, H. Seasonal variability of skid resistance in paved roadways. Proc. Inst. Civ. Eng. Transp. 2011, 164, 23–32. [Google Scholar] [CrossRef]
- Ahammed, M.A.; Tighe, S.L. Asphalt pavements surface texture and skid resistance: Exploring the reality. Can. J. Civ. Eng. 2012, 39, 1–9. [Google Scholar] [CrossRef]
- D’Apuzzo, M.; Festa, B.; Giuliana, G.; Mancini, L.; Nicolosi, V. The evaluation of runway surface properties: A new approach. Procedia-Soc. Behav. Sci. 2012, 53, 1194–1203. [Google Scholar] [CrossRef]
- Najafi, S.; Flintsch, G.W.; Medina, A. Linking roadway crashes and tire-pavement friction: A case study. Int. J. Pavement Eng. 2017, 18, 119–127, No.1039005. [Google Scholar] [CrossRef]
- Najafi, S.; Flintsch, G.W.; Khaleghian, S. Pavement friction management: Artificial neural network approach. Int. J. Pavement Eng. 2019, 20, 125–135. [Google Scholar] [CrossRef]
- Kane, M.; Cerezo, V. A contribution to Tire/Road Friction Modelling: From a Simplified Dynamic Frictional Contact Model to a “Dynamic Friction Tester” Model. Wear 2015, 342–343, 163–171. [Google Scholar] [CrossRef]
- Kane, M.; Do, M.-T.; Cerezo, V.; Rado, Z.; Khelifi, C. Contribution to pavement friction modelling: An introduction of the wetting effect. Int. J. Pavement Eng. 2019, 20, 965–976. [Google Scholar] [CrossRef]
- Izeppi, E.L.; Flintsch, G.; McCarthy, R. Evaluation of Methods for Pavement Surface Friction: Testing on Non-Tangent Roadways and Segments; Research & Development, NCDOT Project 2017-02 2017, FHWA/NC/2017-02; State of North Carolina, Department of Transportation: Blacksburg, VA, USA, 2017. [Google Scholar]
- Plati, C.; Pomoni, M.; Georgouli, K. Quantification of skid resistance seasonal variation in asphalt pavements. J. Traffic Transp. Eng. 2020, 7, 237–248. [Google Scholar] [CrossRef]
- Zaid, N.B.M.; Hainin, M.R.; Idham, M.K.; Warid, M.N.M.; Naqibah, S.N. Evaluation of Skid Resistance Performance Using British Pendulum and Grip Tester. Earth Environ. Sci. 2019, 220, 012016. [Google Scholar] [CrossRef]
- Perez-Acebo, H.; Gonzalo-Orden, H.; Rojí, E. Skid resistance prediction for new two-lane roads. Proc. Inst. Civ. Eng. Transp. 2019, 172, 264–273. [Google Scholar] [CrossRef]
- Perez-Acebo, H.; Gonzalo-Orden, H.; Findley, D.J.; Rojí, E. A skid resistance prediction model for an entire road network. Constr. Build. Mater. 2020, 262, 120041. [Google Scholar] [CrossRef]
- Perez-Acebo, H.; Montes-Redondo, M.; Appelt, A.; Findley, D.J. A simplified skid resistance predicting model for a freeway network to be used in a pavement management system. Int. J. Pavement Eng. 2022. [Google Scholar] [CrossRef]
- Kuriyagawa, Y.; Kageyama, I.; Haraguchi, T.; Kaneko, T.; Asai, M.; Tahira, S.; Matsumoto, G. Study on Measurement for Friction Characteristics on Actual Road Surface: Construction of estimation method for road friction characteristic indexes. Trans. JSAE 2022, 53, 379–384. (In Japanese) [Google Scholar]
- Kageyama, I.; Kobayashi, Y.; Haraguchi, T.; Asai, M.; Matsumoto, G. Study on Measurement for Friction Characteristics on Actual Road Surface. Trans. JSAE 2020, 51, 924–930. (In Japanese) [Google Scholar]
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Asai, M.; Matsumoto, G. Study on the Road Friction Database for Automated Driving: Fundamental Consideration of the Measuring Device for the Road Friction Database. Appl. Sci. 2021, 12, 18. [Google Scholar] [CrossRef]
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Nishio, M.; Matsumoto, G. Construction of Characteristic Measurement System for Ordinary Road Friction. In Proceedings of the JSAE Annual Meeting, Yokohama, Japan, 15 May 2020. (In Japanese). [Google Scholar]
- Pacejka, H.B.; Bakker, E. The magic formula tire model. Suppl. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Nishio, M.; Watanabe, A. Study on Road Friction Database for Traffic Safety: Construction of a Road Friction-Measuring Device. Inventions 2022, 7, 90. https://doi.org/10.3390/inventions7040090
Kageyama I, Kuriyagawa Y, Haraguchi T, Kaneko T, Nishio M, Watanabe A. Study on Road Friction Database for Traffic Safety: Construction of a Road Friction-Measuring Device. Inventions. 2022; 7(4):90. https://doi.org/10.3390/inventions7040090
Chicago/Turabian StyleKageyama, Ichiro, Yukiyo Kuriyagawa, Tetsunori Haraguchi, Tetsuya Kaneko, Minoru Nishio, and Atsushi Watanabe. 2022. "Study on Road Friction Database for Traffic Safety: Construction of a Road Friction-Measuring Device" Inventions 7, no. 4: 90. https://doi.org/10.3390/inventions7040090