2.1. QFD—Quality Function Deployment
The Design For Six Sigma (DFSS) is a design methodology articulated in a sequence of steps that are meant to shape the phases of brainstorming, customer targeting, product development, benchmarking (BM), and aesthetic styling [
32,
33,
34] in a standardized procedure. Procedure standardization is thought to upgrade product design by reducing time and energy dissipation, as well as by meeting client requirements meticulously. This research is based on products already available on the market, aiming to seek and correct main limitations, thus obtaining a more satisfying and innovative product.
The DFSS is also supported by Stylistic Design Engineering (SDE) and Quality Function Deployment (QFD) analysis which is articulated in different means of evaluation:
The Six Questions serve as mean of draft investigation on product characteristics. Answers will be further translated into project information through the Relationship Matrix of Relative Importance. This step has the objective to establish a utility hierarchy among selected features that determines which feature is the most important. Then, outcomes from the first matrix are examined through the Relationship Matrix of Dependence/Independence, with the purpose of evaluating the dependency and independency of product characteristics from one another.
The DFSS approach is built on a rigorous and farsighted strategy of specific work phases. At the industrial level, this systematic modus operandi is cost and time efficient as each step of the pattern is operated by dedicated offices, relying on specialized knowledge and skills. This research will further follow a work pattern in the form of the acronym DMADV, consisting of 5 distinct phases: define, measure, analyze, design, and validate.
Define: The purpose of this step is to collect information of client needs, identifying product functions and its general context. The first phase is supported by QFD, a useful analysis for quality management, asking the Six Questions (namely who, where, when, how, what and why) that characterize the product placement.
Measure: This phase is decisive in order to assess product features that guarantee customer satisfaction. Main characteristics are defined through QFD Interrelation Matrixes.
Analyze: Benchmarking (BM) and Top/Flop (TF) analysis is performed, allowing for the examination of similar competitive products’ design.
Design: Relying on data gathered from preceding steps, computer-aided design (CAD) concepts are made, aiming to fulfill both functional and aesthetical requirements. This phase is supported by the What/How Matrix following QFD guidelines.
Validate: At last, it is verified if the product satisfies engineered characteristics. Eventually, prototypes are crafted and tested in order to assess the continuation of design features.
The DFSS steps’ purposes are summarized in
Table 1.
A systematic methodology allows for the steady management of both technical phases and the industrial organization of personnel, striving to achieve efficiency and fluency of work. Relating to the DMADV design pattern:
define and measure phases should be performed by the product marketing office;
analyze phase by the purchasing office; and
validate phase by the experimental technical office.
These considerations are summarized as follows in
Table 2.
2.1.1. Define: The Six Questions
The first step of DFSS consists of giving open answers to the Six Questions (namely who, what, where, when, why and how); this phase supports product development by establishing guidelines that organize the process of brainstorming.
Who are the customers? What is the use of the developing product? Where, when, and how will they apply it to their daily routines? Why? These questions are functional to addressing major product characteristics by identifying the overall background and how the product is useful to the customer. Therefore, it is possible to detect those factors that have to be maintained and/or enhanced in the design of a competitive new product. Answers to the Six Questions applied to the case study are reviewed in
Table 3.
Moreover, according to current literature [
34], main limitations concerning the ability to independently mobilize are found in the lacking of audio feedback from public transportation (82.4%) and traffic lights (81.4%); failing to find the entrance of a building (64.9%) and irregular sidewalks (58.7%); falling down because of unknown stairs (48.5%) and roadside holes (44.3%); hitting of obstacles on the waist level (47.4%); and getting lost (45.3%). Among the participants of the survey, 66% were blind and 34% had low vision. In total, 95.3% used white canes and 97.7% brought a mobile phone when travelling outdoors, showing a large acceptance of phone services such as the Short Message Service (70.1%), accessing the internet (45.4%), and GPS navigation (34%). Living in a world where society is increasingly connected, technological integrations such as GPS units for assisted navigation could enhance the safety of the customer. In fact, 84.5% of the participants pointed out the importance of GPS navigation tools while travelling outdoors. By having such a large number of white cane users, it is necessary to ask visually impaired citizens about the main impediments they face in their everyday independent navigation, with the purpose of designing the best product possible.
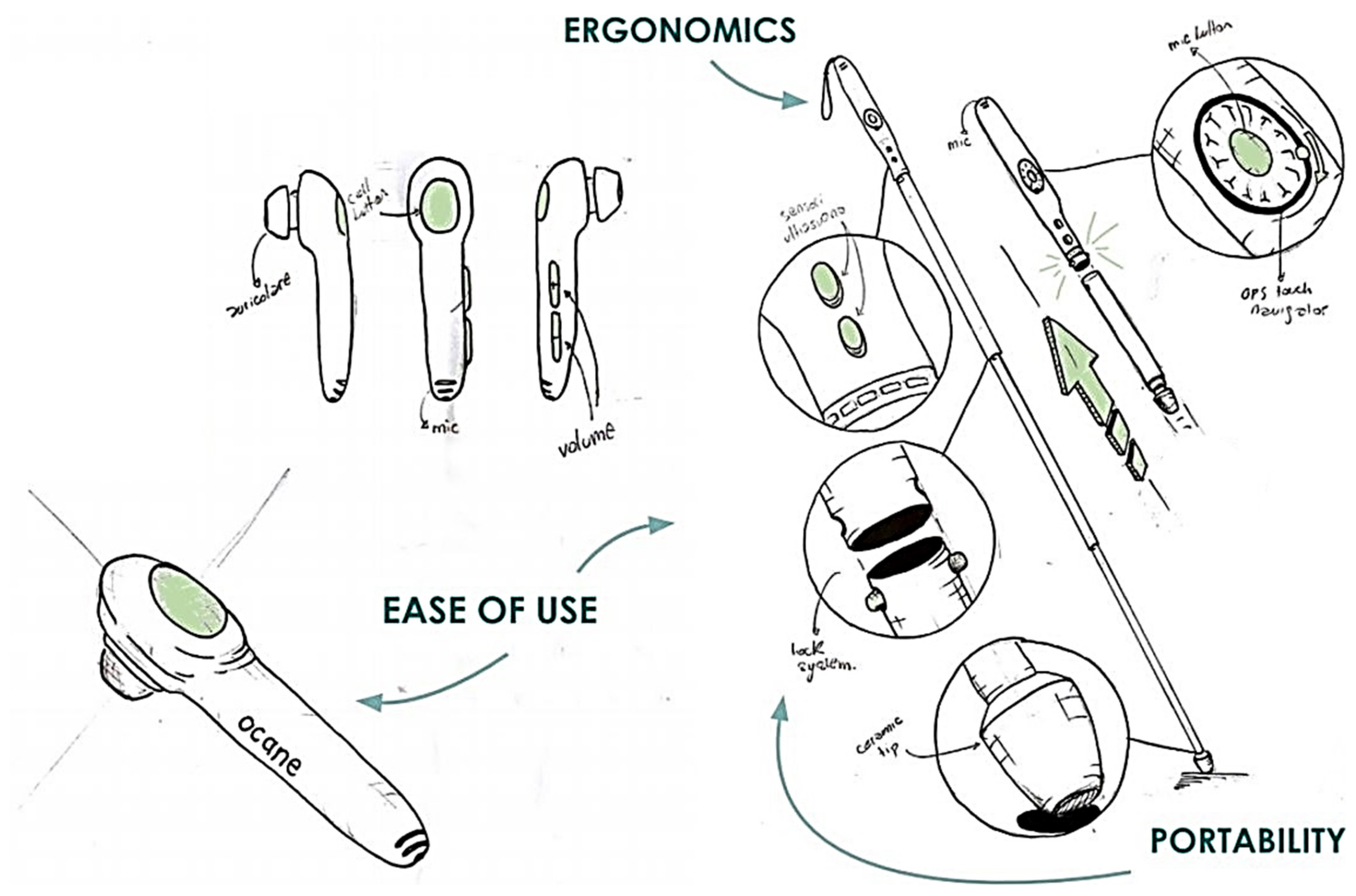
As the product is intended to actively assist people with profound disabilities in their daily tasks, characteristics of steadiness and reliability are mandatory.
Therefore, considering daily use in both indoor and outdoor environments, the product has to be ergonomic, lightweight, and easily transportable. The cane occupies the hand of the person and its use could also be protracted overtime, thus, it has to have an adequate battery life, must be comfortable, and should not overstrain the user. Cost is another important factor considering that the vast majority of visually impaired people live in poor countries and their disability strongly influences their ability to provide for themselves.
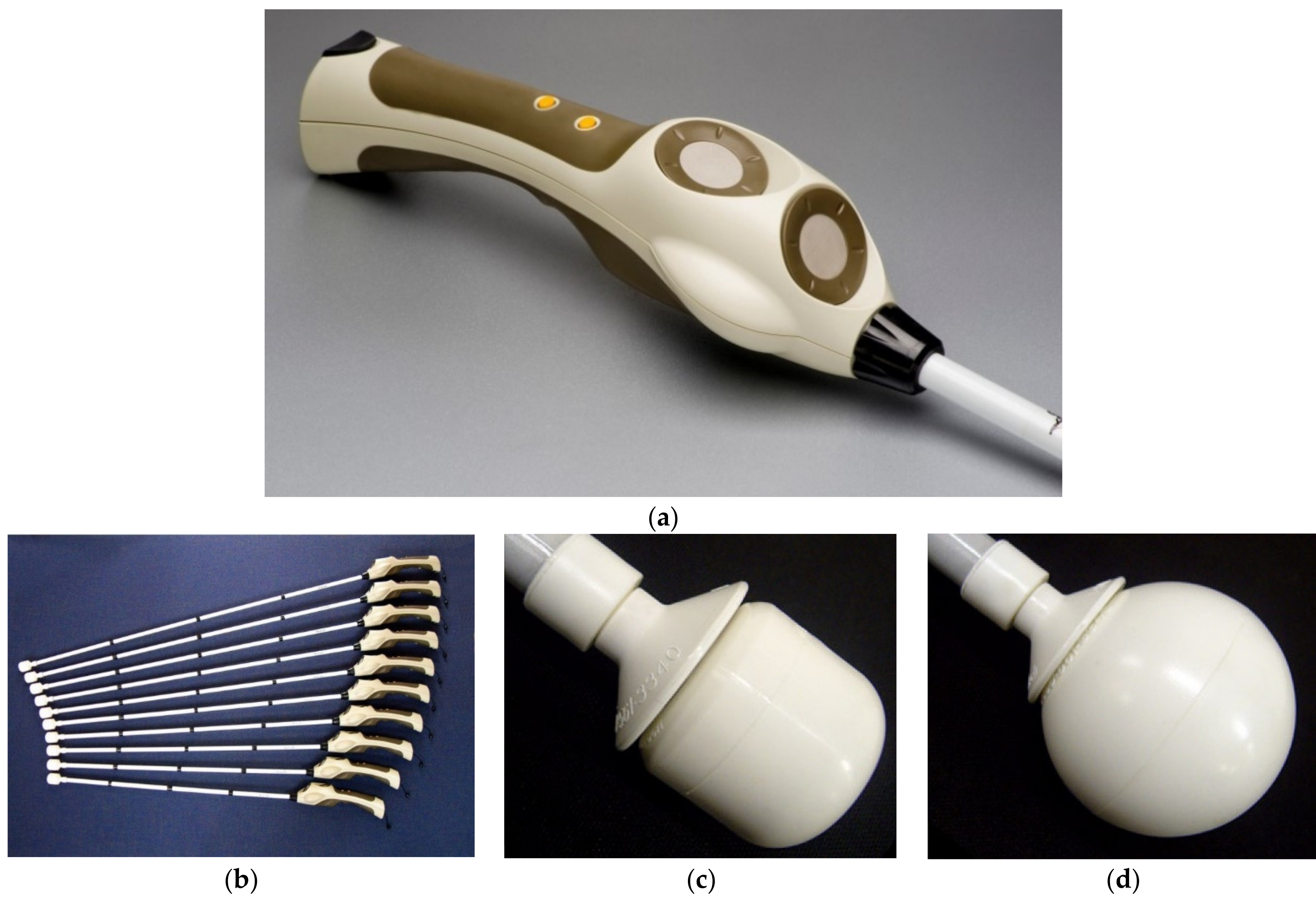
Traditional white cane is an affordable instrument but has no additional connection to the environment apart from tactile and acoustic feeling. The tip of the stick is usually made of a ceramic material that enhances a clear acoustic feedback by tapping it onto the surface [
35]. Smart canes would integrate sensors and devices that connect with the surroundings in a deeper manner, resulting in an enhancement of safety and independence for the customer. However, additional technologies have to maintain the product’s simplicity of use, avoiding frustration and mistrust in users.
2.1.2. Measure: Relationship Matrices
A smart cane for the blind must be steady but also portable, must be ergonomic, easy to use, and should also be a reasonable investment that allows for safe navigation. How do these considerations become measurable information?
Found features are put in the Relationship Matrix of Relative Importance in rows and columns following the same order (
Table 4).
Relative importance is evaluated numerically, filling every cell with a value of 0, 1, or 2. If the requirement of the row is more important that the one of the column, 0 is given, while 1 is given if requirements are equally important and 2 if the requirement of the column is more important than the one from the row. Then, values are summed and features with the highest scores are highlighted.
Thus, the first matrix produces aspects that are essential for the purpose of the product. The innovative smart cane has to be steady, easy and comfortable to use, and must produce a reliable connection with the environment, enhancing safety of navigation.
The second matrix in
Table 5 identifies their mutual dependence. Features still occupy rows and columns in the same order and a value of 0, 1, 3, or 9 is added in each cell. No dependence is represented by 0, while 1 represents mild dependence, 3 represents average dependence, and 9 represents strong dependence. The major sum of the rows indicates the aspect that is most affected by the others, while the major sum of the columns identifies the aspect that overall influences other features.
2.1.3. Analyze: Benchmarking and Top-Flop Analysis
The third step of the DFSS method consists of actively comparing available products in order to establish a hierarchy based on prominent parameters. The first phase of this stage is called Benchmarking (BM) and has the purpose of identifying similar products already available on the market. The second phase of this stage is called Top-Flop Analysis and consists of comparing chosen products, stating their winning features and limitations. The best values found are set to be the starting features for an innovative device. Canes were compared on the following parameters: safety, weight, ergonomic structure, price, battery life, charging time, water resistance, separate sale of the cane, period of warranty, obstacle detection range, and simplicity of use.
The selected canes are summarized in
Table 5 and the best/worst features of each product are highlighted in green/red. For each top or flop characteristic, a value of +1 or −1 is considered for each item. Then, the total sum of each product is made, resulting in a DELTA (Δ) for each symbol. This value is meant to measure the innovation of a product on a certain number of features. In order to be competitive, the new product has to enter the market with a better Δ than its competitors.
Benchmarking
Although several research studies have been published aiming to design an innovative smart cane, some of them are still in development. Thus, very few products are already for sale [
36]. Available canes are summarized in
Table 6.
Top-Flop Analysis
This step has the purpose of highlighting the winning features for the end user and the limitations found in the identified competitors. Items are compared on a certain number of parameters and a Δ is evaluated for each product, expressing an “innovation” indicator.
Smart canes found on the market were confronted on the following parameters: price, safety, weight, ergonomic structure, and battery life.
Safety
A smart cane is designed with the purpose of protecting its user from obstacles that are not detectable with the traditional stick. It is documented that blind people very often experience head trauma [
8] because the white analogic cane only gives feedback on knee-level objects. Therefore, safety is an indispensable aspect to consider when trying to improve daily routines of the visually impaired. Ultrasonic sensors are found to be a reliable and cost-effective mean of interaction with the environment. The device sends ultrasonic sound waves to the surroundings and processes a response of different electrical signals based on the time taken by the sound wave to travel back from the impacted surface.
The signal is generally transduced in an acoustic stimulus emitted from the cane (es. BAWA Cane emits feedbacks of 80 dB) or from a Bluetooth earpiece connected with the stick. However, an acoustic-driven navigation can be unhelpful in crowded places or in intense traffic. Furthermore, as blind people profoundly rely on the sense of sound [
41], an earpiece or headset could be very distracting. In order to give customers the chance to receive feedback while having their ears free from obstruction, it was thought to equip the innovative cane with a bone conduction earpiece. Bone conduction hearing is an interesting technology that stimulates the skull, producing a vibration that transmits to the inner ear, bypassing outer and middle sections. It has been recently documented that a bone conduction navigation system for the blind gave optimistic results [
42]. It is important that visually impaired people continue to rely on their senses rather than overstimulate them with artificial feedbacks [
43].
The signal is also transduced very often in haptic stimuli, resulting in different vibrating patterns that shake the fingers of the user from the handle. UltraCane, SmartCane™, and WeWalk all give haptic feedbacks and differences in the intensity and frequency of the vibration are meant to give the visually impaired a sense of sight by trying to depict a mental map of the environment. However, long-lasting usage could damage the user’s health as it was found that vibrations of the hand and wrist produce pain and induce blind people to change their grip on the handle [
44].
Weight and Ergonomic Factors
In order to design a useful and innovative product, it is important to use empathy to step into the shoes of the visually impaired and understand that a cane is their mean of independence and safety. Blind people make daily use of the white cane and their movements are greatly influenced by the need of a stick for assisted navigation. It has been seen that those repetitive movements [
45] drastically change normal musculoskeletal walking patterns and the extended tapping of the tip onto the ground could potentially damage the user’s health [
46]. Furthermore, it has been found that smart canes tend to be twice as heavy than traditional analogic canes [
47]. Thus, a new smart cane must be lightweight and the handle must be ergonomic, preventing long-term repercussions on the muscular system.
Simplicity of Use
Every travel aid object, smart or traditional, needs several hours of training in order to be efficient and put in action. The learning curve of smart devices is inevitably longer, as the user needs to adapt to a certain number of extra features [
48]. The blind community is still divided on addressing their utility, as a massive portion is gradually abandoning smart devices, aspiring to rely more on their own senses. It has been recently discovered that blindness “reorganizes” brain sections that are involved in information processing. Blind people use “echolocation” that gives them a feeling of sight by producing mouth-clicks or quick noises and allows them to produce a mental map of the ambience. This information acquisition process is similar to how bats communicate with the environment, as they often live in dark caves and have a very low level of sight [
43]. It has been recently documented that echolocation is directly linked to the visual cortex rather than areas that are dedicated to process acoustic information [
49]. Thus, it seems that the human brain naturally adapts to sight loss by trying to substitute viewing acquisition with other senses, producing a mental image of the environment [
50]. In this direction, it is believed that overloading assistive devices with sensors and technology could potentially represent a disadvantage rather than an improvement.
Based on the previous considerations, simplicity of use was evaluated as follows:
low: the device has a high level of assistance (smartphone connection with dedicated applications, a headset, a voice-assisted navigation, and multiple functions and controls);
medium: the device has a medium level of assistance (smartphone connection, voice-assisted navigation, and acoustic feedbacks); and
high: the device has a low level of assistance (the cane has no smartphone connection, no extra connections, and feedback comes from the handle only through haptic systems).
Ease of Transport
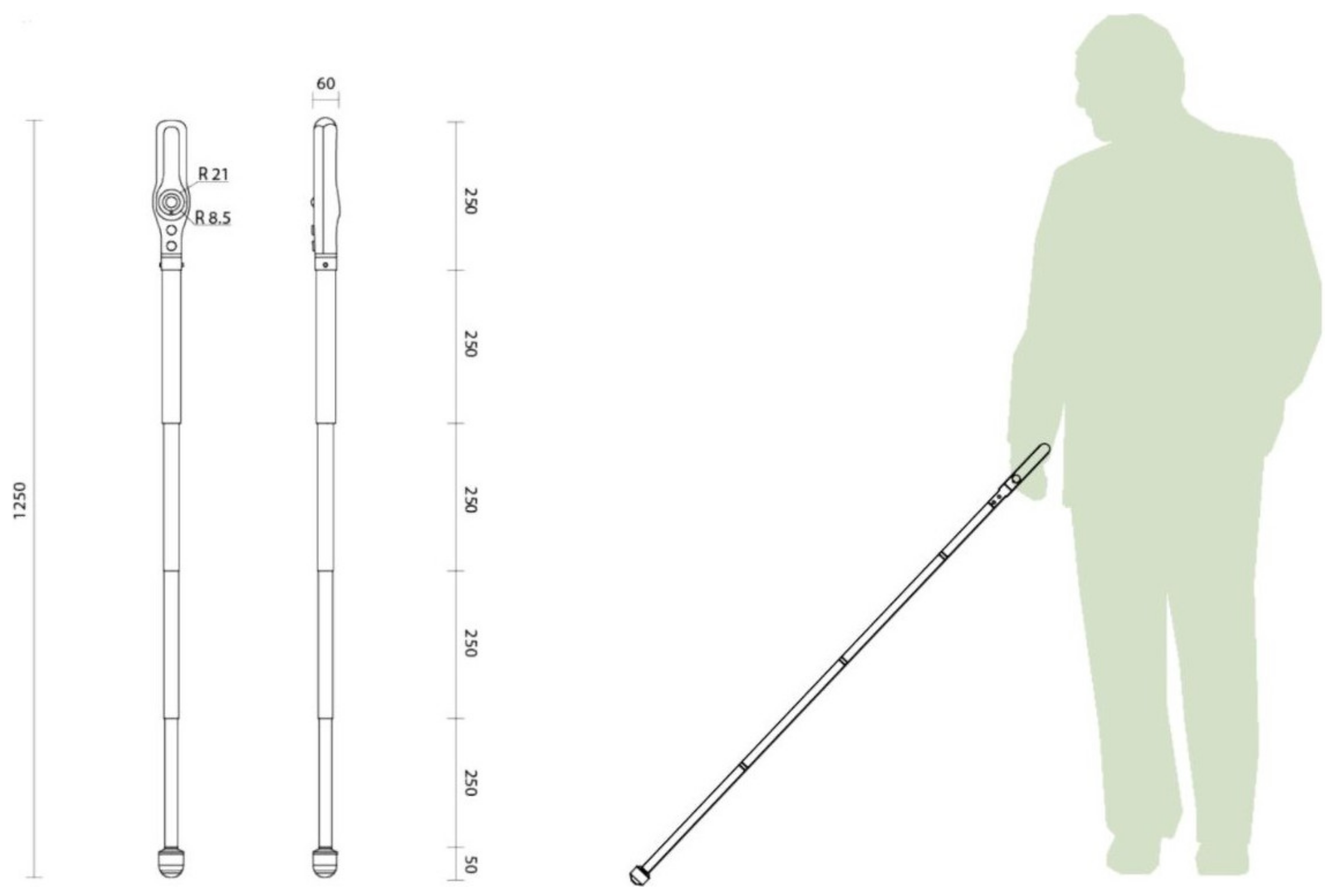
There is no substantial difference in the structure between the traditional white cane and a smart cane. The four abovementioned products are clip-on devices that support the traditional cane as an additional device (BAWA Cane), are smart handles that come with a stick and are easily disassembled (WeWalk, SmartCane™, and UltraCane), or are adapted to already existing sticks. Canes are usually rigid, telescopic, or made of foldable sections kept together by an inner elastic cable. The last configuration is really appreciated because it guarantees steadiness but is also easily transportable, as the cane can be discreetly carried in a bag. The material is usually an aluminum alloy, ensuring steadiness and ensuring a light weight.
Main characteristics were examined in detail as a smart cane for the visually impaired is not a common item but must accomplish very specific tasks for a particular customer need. Its requirements and limitations could be misunderstood by sightless citizens, especially if not familiar with sight loss and visual impairments. Based on the considerations examined, a top-flop table (
Table 7) was constructed, comparing canes in terms of following the parameters demanded by unsighted customers: safety, weight, ergonomic structure, price, battery life, charging time, water resistance, separate sale of the cane, period of warranty, obstacle detection range, and simplicity of use. The best features are highlighted in green and worst features in red. Innovative features are summarized in
Table 8.
Hence, the new innovative cane should have at least a Δ > 2 in feature offering. It has to benefit from both an acoustic and tactile feedback system in order to avoid information dissipation in crowded places. A bone conduction system would be a very useful improvement, leaving user ears unimpeded. It must be light (around 100 g) and ergonomic to ensure the user does not feel overstrained by continuous use of the device and must have a long-lasting battery autonomy that could be quickly recharged. Water resistance could be a huge innovation. Considering ultrasonic sensors are able to detect raindrops, the feedback system would overload the user with information; thus, a sudden downpour could immediately stop the navigation of the visually impaired. The cane should be equipped with a variable range of obstacle detection including a short range for indoor navigation and a longer range for outdoor navigation. The cane should be included in the purchase; however, because the traditional white cane is still the main mean of navigation, it should be detachable and allow for the pairing with existing white canes through an adaptation system.
Overall, it should be an affordable investment with a low level of smart features and assistance.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}