
Review of Ship Microgrids: System Architectures, Storage Technologies and Power Quality Aspects

 ,
,  , , and
, , and 
Abstract
:
1. Introduction
2. Ship Power System Architectures, Loads and Sources
2.1. Ship Power System Architectures
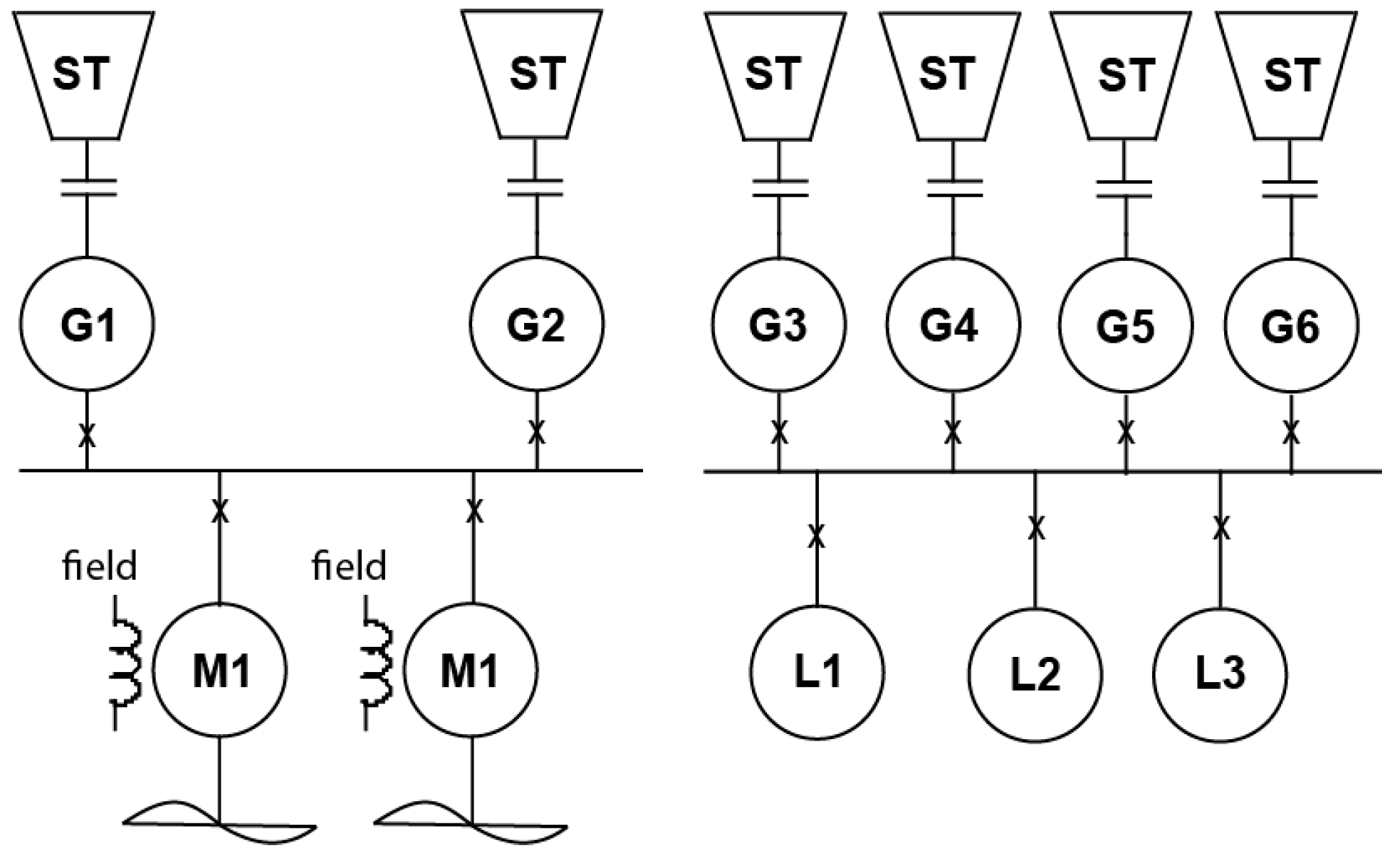
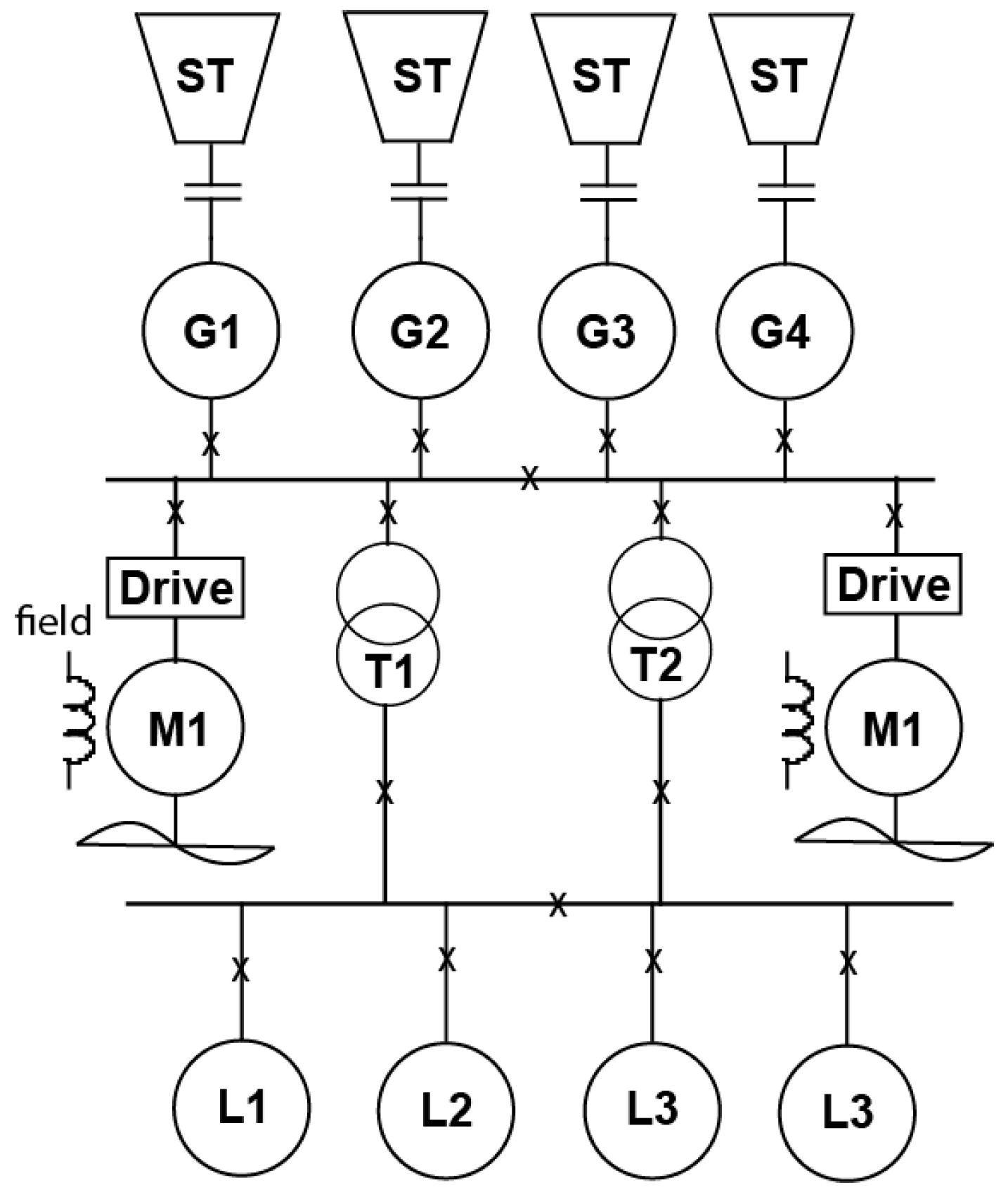
2.1.1. Traditional Ship Power System Architectures
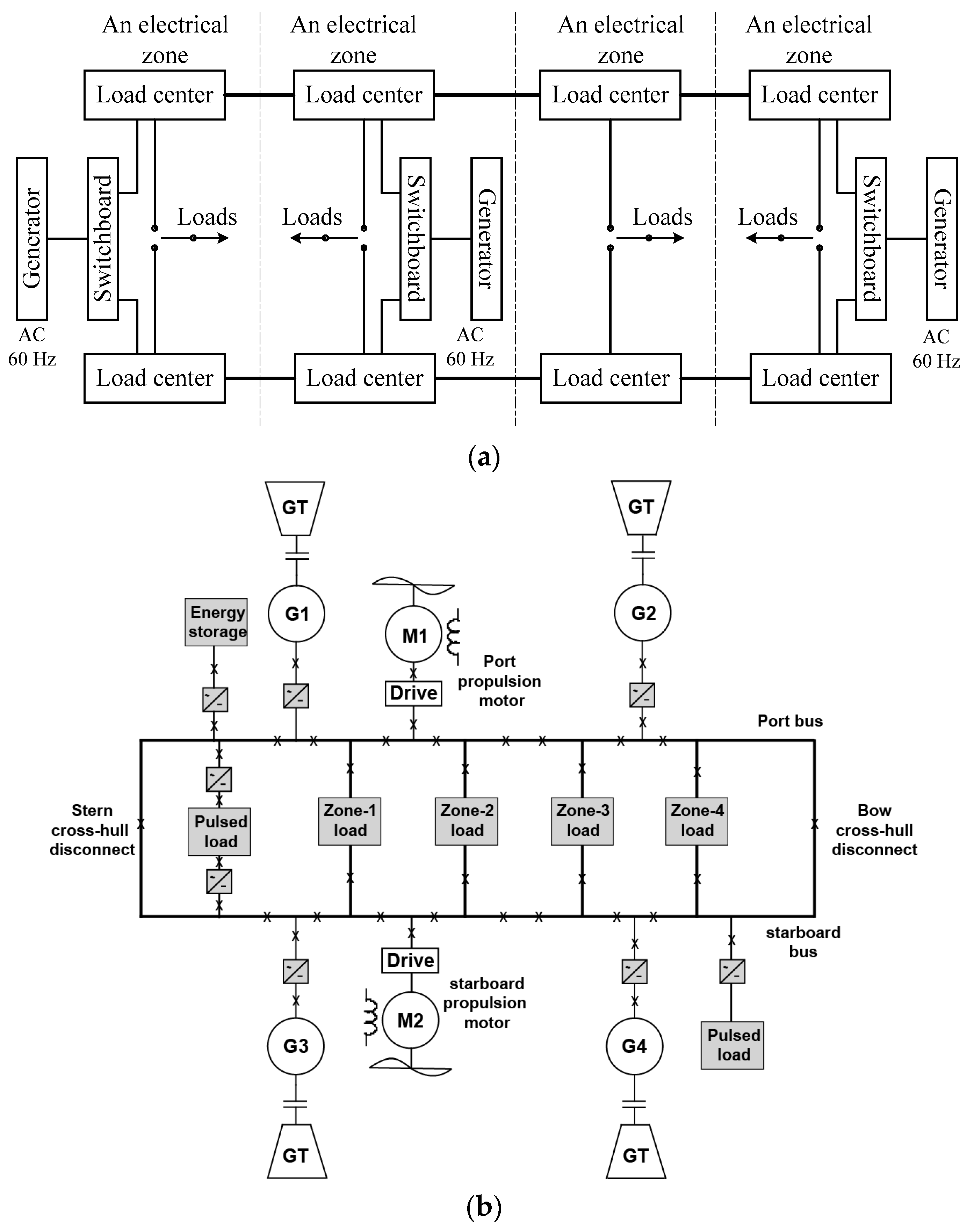
2.1.2. Modern Power System Architectures
2.1.3. Comparison of ac and dc Power Systems and Impact on Power Quality
2.2. Loads in Maritime Power Systems and Their Impact on Power Quality
2.3. Power Sources in Ship Power Systems
3. Power Quality Issues and Regulations Applicable to Ship Microgrids
4. Energy Storage Solution for Power Quality Improvement
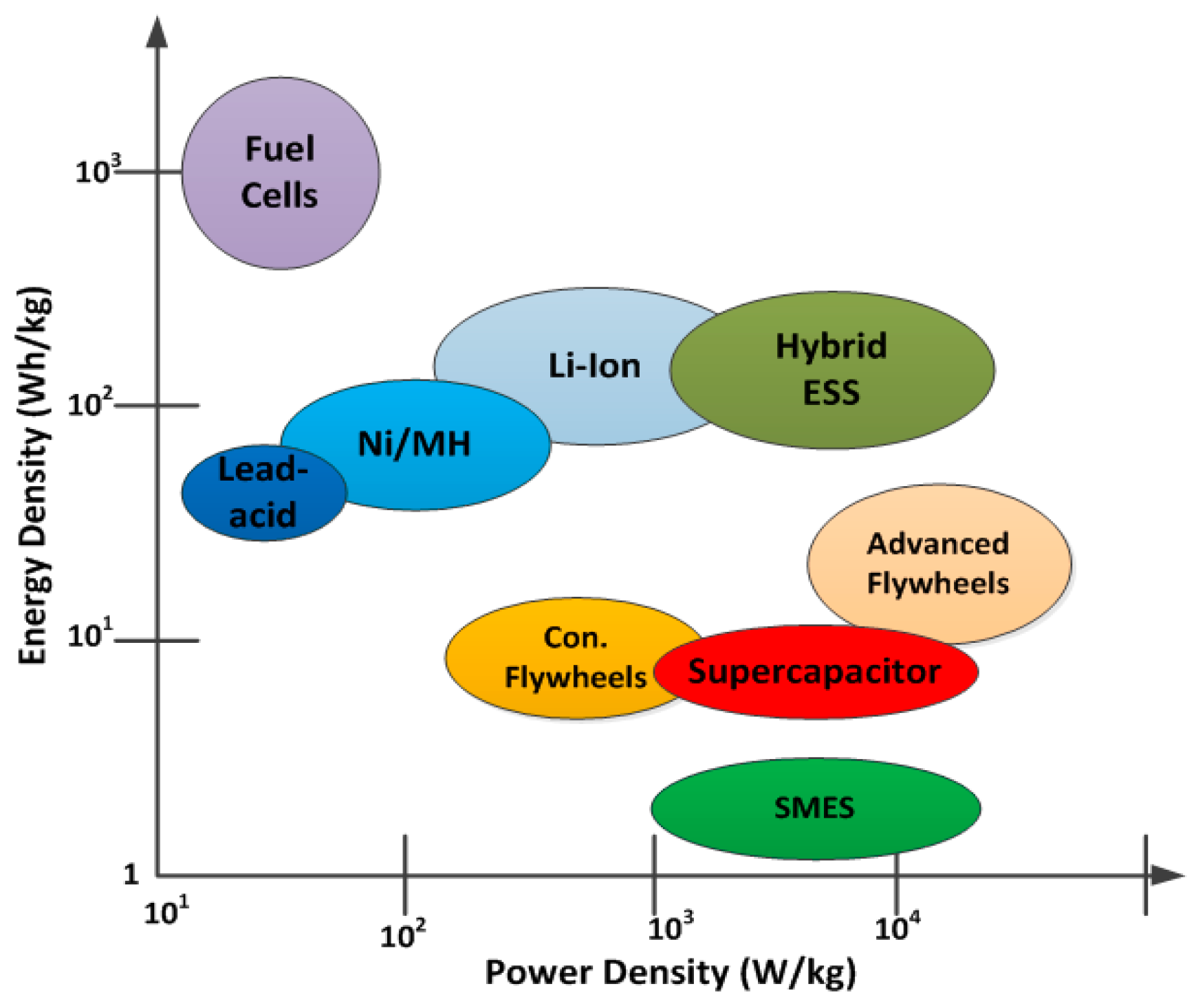
4.1. Energy Storage Systems (ESSs) for Ship Microgrids
4.1.1. Battery Energy Storage Systems
4.1.2. Supercapacitors
4.1.3. Flywheels
4.1.4. Superconducting Magnetic Energy Storage (SMES) Systems
4.1.5. Hybrid Energy Storage Systems
4.2. Managing Power Quality Issues
4.2.1. Managing Voltage Sags/Dips
4.2.2. Managing Voltage Unbalance
4.2.3. Managing Harmonics and Resonance Issues
4.2.4. Managing Frequency Excursions
4.3. Challenges of Incorporating Power Quality Mitigation Strategies to ESSs
5. Concluding Remarks
Conflicts of Interest
References
- McCoy, T.J. Trends in ship electric propulsion. In Proceedings of the 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; Volume 1, pp. 343–346.
- Chalfant, J.S.; Chryssostomidis, C. Analysis of various all-electric-ship electrical distribution system topologies. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 72–77.
- American Bureau of Shipping. International Naval Ships, Guide for Building and Classing, Part 4 Vessel Systems and Machinery, American Bureau of Shipping; 2016 International Association of Classification Societies, Requirements Concerning Electrical and Electronic Installations; IACS Req.: Houston, TX, USA, 2016. [Google Scholar]
- Sulligoi, G.; Vicenzutti, A.; Tironi, E.; Corti, M.; Lamedica, R.; Ruvio, A.; Lipardi, G.; Piva, L. Naval smart grid: Integrated Power System for all electric naval vessels with control and reliability characteristics. In Proceedings of the AEIT Annual Conference—From Research to Industry: The Need for a More Effective Technology Transfer (AEIT), Trieste, Italy, 18–19 September 2014; pp. 1–6.
- QUEEN MARY II Technical Information. Available online: http://www.cunard.com/documents/press%20kits/queen%20mary%202/queen_mary_2_technical.pdf (accessed on 12 November 2016).
- Report on the Investigation of the Catastrophic Failure of a Capacitor in the AFT Harmonic Filter Room on Board RMS Queen Mary 2 while Approaching Barcelona on 23 September 2010. Report No 28/2011. Available online: http://www.maib.gov.uk/publications/investigation_reports/2011/qm2.cfm (accessed on 12 November 2016).
- Rules for Classification Ships, Part 4 Systems and components, Chapter 8 Electrical installations. Det Norske Veritas GL Edition: Høvik, Norway, 2011. Available online: https://rules.dnvgl.com/docs/pdf/DNV/rulesship/2011-01/ts408.pdf (accessed on 12 November 2016).
- Wolfe, J.; Roa, M. Advanced Methods for Tabulation of Electrical Loads during Special Modes of Marine Vessel Operation. IEEE Trans. Ind. Appl. 2017, 53, 667–674. [Google Scholar] [CrossRef]
- Skjong, E.; Rødskar, E.; Molinas, M.; Johansen, T.; Cunningham, J. The marine vessel’s electrical power system: From its birth to present day. Proc. IEEE 2015, 103, 2410–2424. [Google Scholar] [CrossRef]
- Hegner, H.; Desai, B. Integrated fight through power. In Proceedings of the 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; pp. 336–339.
- Rose, M.W.; Cuzner, R.M. Fault isolation and reconfiguration in a three-zone system. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 409–414.
- Bose, S.; Natarajan, B.; Scoglio, C.; Das, S.; Schulz, N.N. Analysis of robustness for shipboard power system with non-radial power flow. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 181–186.
- Hansen, J.F.; Wendt, F. History and State of the Art in Commercial Electric Ship Propulsion, Integrated Power Systems, and Future Trends. Proc. IEEE 2015, 103, 2229–2242. [Google Scholar] [CrossRef]
- Dubey, A.; Santoso, S. Availability-Based Distribution Circuit Design for Shipboard Power System. IEEE Trans. Smart Grid 2015. [Google Scholar] [CrossRef]
- Schuddebeurs, J.D.; Norman, P.J.; Booth, C.D.; Burt, G.M.; McDonald, J.R. Emerging Research Issues Regarding Integrated-Full-Electric-Propulsion. In Proceedings of the 41st International Universities Power Engineering Conference, Newcastle-upon-Tyne, UK, 6–8 September 2006; pp. 669–673.
- Bosich, D.; Vicenzutti, A.; Pelaschiar, R.; Menis, R.; Sulligoi, G. Toward the future: The MVDC large ship research program. In Proceedings of the 2015 AEIT International Annual Conference (AEIT), Naples, Italy, 14–16 October 2015; pp. 1–6.
- Apsley, J.M.; Gonzalez-Villasenor, A.; Barnes, M.; Smith, A.C.J.; Williamson, S.; Schuddebeurs, J.D.; Norman, P.J.; Booth, C.D. Propulsion Drive Models for Full Electric Marine Propulsion Systems. IEEE Trans. Ind. Appl. 2009, 45, 676–684. [Google Scholar] [CrossRef]
- Chen, X.; Wang, X. A novel wound rotor BDFIG for ship shaft generator application—Control and prototype tests. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1196–1200.
- IEEE Industry Applications Society. 1709–2010—IEEE Recommended Practice for 1 kV to 35 kV Medium-Voltage DC Power Systems on Ships; IEEE Standard: New York, NY, USA, 2010; pp. 1–54. [Google Scholar]
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. Multi-Agent System-Based Real-Time Load Management for All-Electric Ship Power Systems in DC Zone Level. IEEE Trans. Power Syst. 2012, 27, 1719–1728. [Google Scholar] [CrossRef]
- Pico, H.N.V.; Aliprantis, D.C.; Sudhoff, S.D. Reachability analysis of shipboard power systems with uncertain pulsed loads. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 395–402.
- Van der Burgt, J.J.A.; van Gelder, P.; van Dijk, E. Pulsed power requirements for future naval ships. In Proceedings of the 1999 12th IEEE International Pulsed Power Conference, Digest of Technical Papers, Monterey, CA, USA, 27–30 June 1999; Volume 2, pp. 1357–1360.
- Jiang, W.; Fang, R.; Khan, J.; Dougal, R. Performance Prediction and Dynamic Simulation of Electric Ship Hybrid Power System. In Proceedings of the 2007 IEEE Electric Ship Technologies Symposium, Arlington, VA, USA, 21–23 May 2007; pp. 490–497.
- Jin, Z.; Sulligoi, G.; Cuzner, R.; Meng, L.; Vasquez, J.C.; Guerrero, J.M. Next-Generation Shipboard DC Power System: Introduction Smart Grid and dc Microgrid Technologies into Maritime Electrical Networks. IEEE Electrif. Mag. 2016, 4, 45–57. [Google Scholar] [CrossRef]
- Vijlee, S.Z.; Ouroua, A.; Domaschk, L.N.; Beno, J.H. Directly-Coupled Gas Turbine Permanent Magnet Generator Sets for Prime Power Generation on Board Electric Ships. In Proceedings of the 2007 IEEE Electric Ship Technologies Symposium, Arlington, VA, USA, 21–23 May 2007; pp. 340–347.
- Mashayekh, S.; Wang, Z.; Qi, L.; Lindtjorn, J.; Myklebust, T.A. Optimum sizing of energy storage for an electric ferry ship. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8.
- Schwoerer, F.; Witzig, W.F. Nuclear power today and tomorrow. IEEE Spectr. 1964, 1, 120–130. [Google Scholar] [CrossRef]
- Donnelly, W. Nuclear Power and Merchant Shipping; U.S. Atomic Energy Commission, Division of Technical Information: Oak Ridge, TN, USA, 1964. [Google Scholar]
- Guo, C.; Sun, Y.; Yuan, C.; Yan, X.; Wang, Y.; Jiang, Q. Research on power load flow calculation for photovoltaic-ship power system based on PSAT. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 443–448.
- Tsekouras, G.J.; Kanellos, F.D.; Prousalidis, J. Simplified method for the assessment of ship electric power systems operation cost reduction from energy storage and renewable energy sources integration. IET Electr. Syst. Transp. 2015, 5, 61–69. [Google Scholar] [CrossRef]
- IEC 61000-4-30:2015. Electromagnetic Compatibility (EMC)—Part 4-30: Testing and Measurement Techniques—Power Quality Measurement Methods; International Electrotechnical Commission: Geneva, Switzerland, 2015. [Google Scholar]
- Mindykowski, J. Case Study—Based Overview of Some Contemporary Challenges to Power Quality in Ship Systems. Inventions 2016, 1, 12. [Google Scholar] [CrossRef]
- Domaschk, L.N.; Ouroua, A.; Hebner, R.E.; Bowlin, O.E.; Colson, W.B. Coordination of Large Pulsed Loads on Future Electric Ships. IEEE Trans. Magn. 2007, 43, 450–455. [Google Scholar] [CrossRef] [Green Version]
- Musolino, V.; Piegari, L.; Tironi, E. Technical and economical evaluation of storage systems in naval applications. In Proceedings of the 2013 International Conference on Clean Electrical Power (ICCEP), Alghero, Italy, 11–13 June 2013; pp. 120–127.
- Hebner, R.E.; Davey, K.; Herbst, J.; Hall, D.; Hahne, J.; Surls, D.D.; Ouroua, A. Dynamic Load and Storage Integration. Proc. IEEE 2015, 103, 2344–2354. [Google Scholar] [CrossRef]
- Evans, I.C.; Hoevenaars, A.H.; Eng, P. Meeting Harmonic Limits on Marine Vessels. In Proceedings of the 2007 IEEE Electric Ship Technologies Symposium, Arlington, VA, USA, 21–23 May 2007; pp. 115–121.
- Musolino, V.; Piegari, L.; Tironi, E. Storage systems for transportation, land handling and naval applications. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion (ESARS), Bologna, Italy, 16–18 October 2012; pp. 1–9.
- Guerrero, M.A.; Romero, E.; Barrero, F.; Milanes, M.I.; Gonzalez, E. Supercapacitors: Alternative Energy Storage Systems. Prz. Elektrotech. 2009, 85, 188. [Google Scholar]
- Akinyele, D.O.; Rayudu, R.K. Review of Energy Storage Technologies for Sustainable Power Networks. Sustain. Energy Technol. Assess. 2014, 8, 74–91. [Google Scholar] [CrossRef]
- Adhikari, S.; Lei, Z.; Peng, W.; Tang, Y. A battery/supercapacitor hybrid energy storage system for DC microgrids. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1747–1753.
- Vechiu, I.; Etxeberria, A.; Camblong, H.; Vinassa, J.M. Three-level Neutral Point Clamped Inverter Interface for flow battery/supercapacitor Energy Storage System used for microgrids. In Proceedings of the 2011 2nd IEEE PES International Conference and Exhibition on Innovative Smart Grid Technologies (ISGT Europe), Manchester, UK, 5–7 December 2011; pp. 1–6.
- Xiao, J.; Wang, P.; Setyawan, L. Hierarchical Control of Hybrid Energy Storage System in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4915–4924. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. Coordinated control and energy management of hybrid energy storage system in PV system. In Proceedings of the 2014 International Conference on Computation of Power, Energy, Information and Communication (ICCPEIC), Chennai, India, 16–17 April 2014; pp. 363–368.
- Srivatchan, N.S.; Rangarajan, P.; Rajalakshmi, S. Control Scheme for Power Quality Improvement in Islanded Microgrid Operation. Procedia Technol. 2015, 21, 212–215. [Google Scholar] [CrossRef]
- Meegahapola, L.G.; Robinson, D.; Agalgaonkar, A.P.; Perera, S.; Ciufo, P. Microgrids of Commercial Buildings: Strategies to Manage Mode Transfer from Grid Connected to Islanded Mode. IEEE Trans. Sustain. Energy 2014, 5, 1337–1347. [Google Scholar] [CrossRef]
- Zhao, X.; Guerrero, J.M.; Savaghebi, M.; Vasquez, J.C.; Wu, X.; Sun, K. Distributed low voltage ride-through operation of power converters in grid-connected microgrids under voltage sags. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 1909–1914.
- Gayatri, M.T.L.; Parimi, A.M.; Kumar, A.V.P. Utilization of Unified Power Quality Conditioner for voltage sag/swell mitigation in microgrid. In Proceedings of the 2016 Biennial International Conference on Power and Energy Systems: Towards Sustainable Energy (PESTSE), Bangalore, India, 21–23 January 2016; pp. 1–6.
- Gayatri, M.T.L.; Parimi, A.M.; Kumar, A.V.P. Application of Dynamic Voltage Restorer in microgrid for voltage sag/swell mitigation. In Proceedings of the 2015 IEEE Power, Communication and Information Technology Conference (PCITC), Bhubaneswar, India, 15–17 October 2015; pp. 750–755.
- Zhao, X.; Guerrero, J.M.; Savaghebi, M.; Vasquez, J.C.; Wu, X.; Sun, K. Low Voltage Ride-Through Operation of Power Converters in Grid-Interactive Microgrids by Using Negative-Sequence Droop Control. IEEE Trans. Power Electron. 2016. [Google Scholar] [CrossRef]
- Gkavanoudis, S.I.; Oureilidis, K.O.; Demoulias, C.S. Fault ride-through capability of a microgrid with wtgs and supercapacitor storage during balanced and unbalanced utility voltage sags. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; pp. 231–236.
- Jayawardena, A.V.; Meegahapola, L.G.; Robinson, D.A.; Perera, S. Low-voltage ride-through characteristics of microgrids with distribution static synchronous compensator (DSTATCOM). In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015; pp. 1–6.
- Hashempour, M.M.; Savaghebi, M.; Vasquez, J.C.; Guerrero, J.M. Voltage unbalance and harmonic compensation in microgrids by cooperation of distributed generators and active power filters. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016; pp. 646–651.
- Zhao, X.; Wu, X.; Meng, L.; Guerrero, J.M.; Vasquez, J.C. A direct voltage unbalance compensation strategy for islanded microgrids. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 3252–3259.
- Kabiri, R.; Holmes, D.G.; McGrath, B.P. Control of Active and Reactive Power Ripple to Mitigate Unbalanced Grid Voltages. IEEE Trans. Ind. Appl. 2016, 52, 1660–1668. [Google Scholar] [CrossRef]
- Xu, L.; Miao, Z.; Fan, L.; Gurlaskie, G. Unbalance and harmonic mitigation using battery inverters. In Proceedings of the North American Power Symposium (NAPS), Charlotte, NC, USA, 4–6 October 2015; pp. 1–6.
- Savaghebi, M.; Vasquez, J.C.; Jalilian, A.; Guerrero, J.M.; Lee, T.L. Selective harmonic virtual impedance for voltage source inverters with LCL filter in microgrids. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1960–1965.
- Micallef, A.; Apap, M.; Spiteri-Staines, C.; Guerrero, J.M. Mitigation of Harmonics in Grid-Connected and Islanded Microgrids via Virtual Admittances and Impedances. IEEE Trans. Smart Grid 2015. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Wang, R.; Zhang, C. Analysis and Mitigation of Resonance Propagation in Grid-Connected and Islanding Microgrids. IEEE Trans. Energy Convers. 2015, 30, 70–81. [Google Scholar] [CrossRef]
- Lee, T.L.; Hu, S.H. Discrete Frequency-Tuning Active Filter to Suppress Harmonic Resonances of Closed-Loop Distribution Power Systems. IEEE Trans. Power Electron. 2011, 26, 137–148. [Google Scholar]
- Yang, S.; Wang, P.; Tang, Y.; Zhang, L. Explicit Phase Lead Filter Design in Repetitive Control for Voltage Harmonic Mitigation of VSI-based Islanded Microgrids. IEEE Trans. Ind. Electron. 2017, 64, 817–826. [Google Scholar] [CrossRef]
- Savaghebi, M.; Guerrero, J.M.; Jalilian, A.; Vasquez, J.C. Mitigation of voltage and current harmonics in grid-connected microgrids. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics (ISIE), Hangzhou, China, 28–31 May 2012; pp. 1610–1615.
- Goyal, M.; John, B.; Ghosh, A. Harmonic mitigation in an islanded microgrid using a D-STATCOM. In Proceedings of the 2015 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Brisbane, Australia, 15–18 November 2015.
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Ramtharan, G.; Ekanayake, J.B.; Jenkins, N. Frequency support from doubly fed induction generator wind turbines. IET Renew. Power Gener. 2007, 1, 3–9. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Frequency Response Capability of Full Converter Wind Turbine Generators in Comparison to Conventional Generation. IEEE Trans. Power Syst. 2008, 23, 649–656. [Google Scholar] [CrossRef]
- Meegahapola, L.G.; Flynn, D. Investigation of frequency stability during high penetration of CCGTs and variable-speed wind generators in electricity networks. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5.
- Tan, Y.; Muttaqi, K.; Ciufo, P.; Meegahapola, L. Enhanced Frequency Response Strategy for PMSG Based Wind Energy Conversion System Using Ultracapacitor in Remote Area Power Supply Systems. IEEE Trans. Ind. Appl. 2016, in press. [Google Scholar]
- Sebastián, R. Application of a battery energy storage for frequency regulation and peak shaving in a wind diesel power system. IET Gener. Transm. Distrib. 2016, 10, 764–770. [Google Scholar] [CrossRef]
- Stroe, D.I.; Knap, V.; Swierczynski, M.; Stan, A.; Teodorescu, R. Operation of Grid-Connected Lithium-Ion Battery Energy Storage System for Primary Frequency Regulation: A Battery Lifetime Perspective. IEEE Trans. Ind. Appl. 2017, 53, 430–438. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Time Constant |
|---|---|
| Ship run-up time | 20 to 500 s |
| Gas turbine generator | 5 to 10 s |
| Propulsion motor | 1 to 5 s |
| Propulsion motor stator leakage time constant | 1 to 10 ms |
| Propulsion motor rotor time constant | 50 ms to 1 s |
| Motor service loads | 0.5 to 1 s |
| DC-DC converters | 100 to 500 ms |
| Pulse width modulation | 0.5 to 2 ms |
| Power Quality Issue | Possible Cause(s) |
|---|---|
| Voltage Sag/Dips | Bow Thruster [32], Electronic Rapid-Response Weapons [33] |
| Voltage Variations (Flicker) | Radar Systems [34] |
| Voltage Swell | Radar Systems [34] |
| Frequency Drop | Switching of Large Loads [35] |
| Harmonics | Power Electronically Interfaced Loads and Generators [36] |
| Quantity in Operation | Variations | |
|---|---|---|
| Permanent | Transient (Recovery Time) | |
| Frequency | ±5% | ±10% (5 s) |
| Voltage | +6% to −10% | ±20% (1.5 s) |
| Power Distortion Limits | Notes |
|---|---|
| No Measures are to be taken | |
| No Measures are to be taken | |
| Conduct analysis to ensure STANAG 1008 requirements are still valid with respect to voltage harmonics |
| Energy Storage Type | Advantages | Disadvantages/Challenges |
|---|---|---|
| Batteries | Low maintenance, high energy density (Li-ion) | Relatively low power density, relatively short cycle life |
| Supercapacitors | Longer life-spam, fast charge and discharge capability | High cost per watt, low energy density |
| Flywheels | Anti-humid characteristic, high power density | Low energy density, mechanical issues |
| SMES | High Storage Efficiency, rapid response | Expensive, cooling issues |
| Hybrid ESS | Can exploit the advantages of two or even more technologies | Expensive, require complex control algorithms |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jayasinghe, S.G.; Meegahapola, L.; Fernando, N.; Jin, Z.; Guerrero, J.M. Review of Ship Microgrids: System Architectures, Storage Technologies and Power Quality Aspects. Inventions 2017, 2, 4. https://doi.org/10.3390/inventions2010004
Jayasinghe SG, Meegahapola L, Fernando N, Jin Z, Guerrero JM. Review of Ship Microgrids: System Architectures, Storage Technologies and Power Quality Aspects. Inventions. 2017; 2(1):4. https://doi.org/10.3390/inventions2010004
Chicago/Turabian StyleJayasinghe, Shantha Gamini, Lasantha Meegahapola, Nuwantha Fernando, Zheming Jin, and Josep M. Guerrero. 2017. "Review of Ship Microgrids: System Architectures, Storage Technologies and Power Quality Aspects" Inventions 2, no. 1: 4. https://doi.org/10.3390/inventions2010004