




Efficacy of Antivibration Gloves When Used with Electric Hammers of about 10 kg for Chiseling Limestone Rocks
Abstract
:1. Introduction
2. Materials and Methods
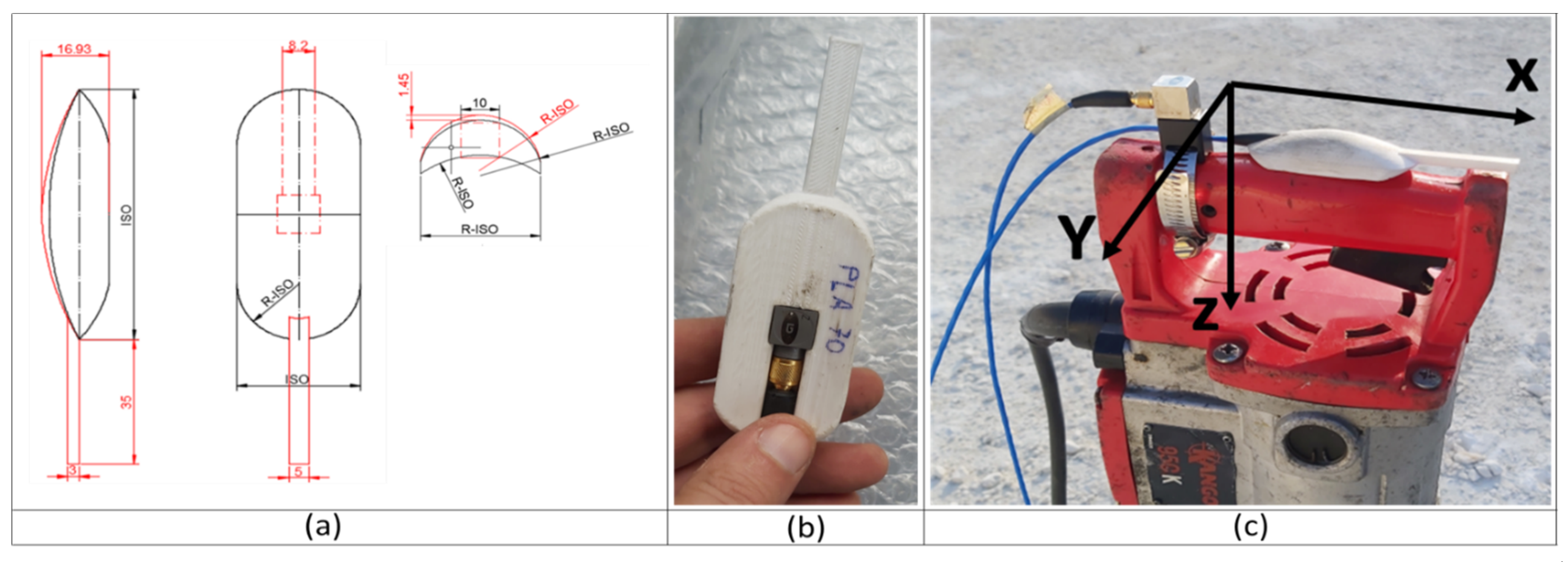
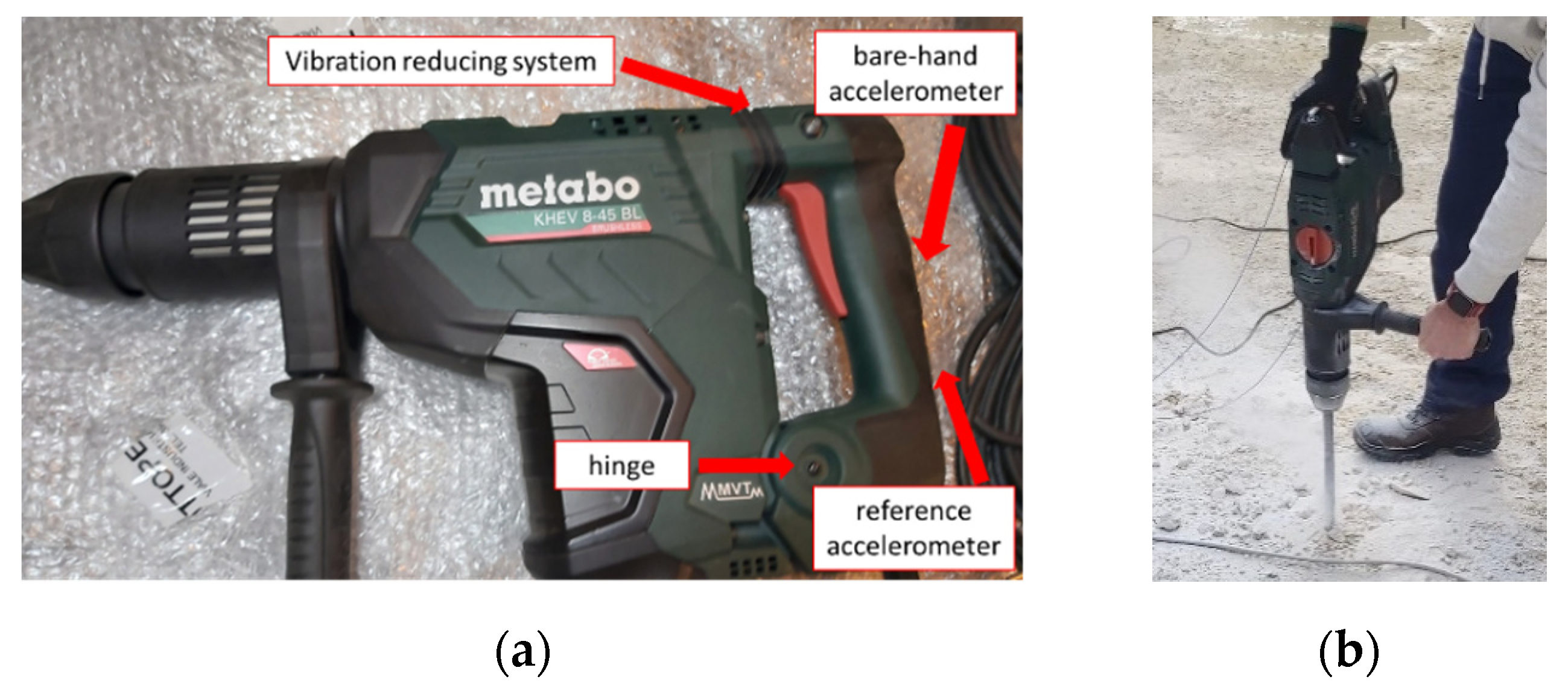
2.1. Materials
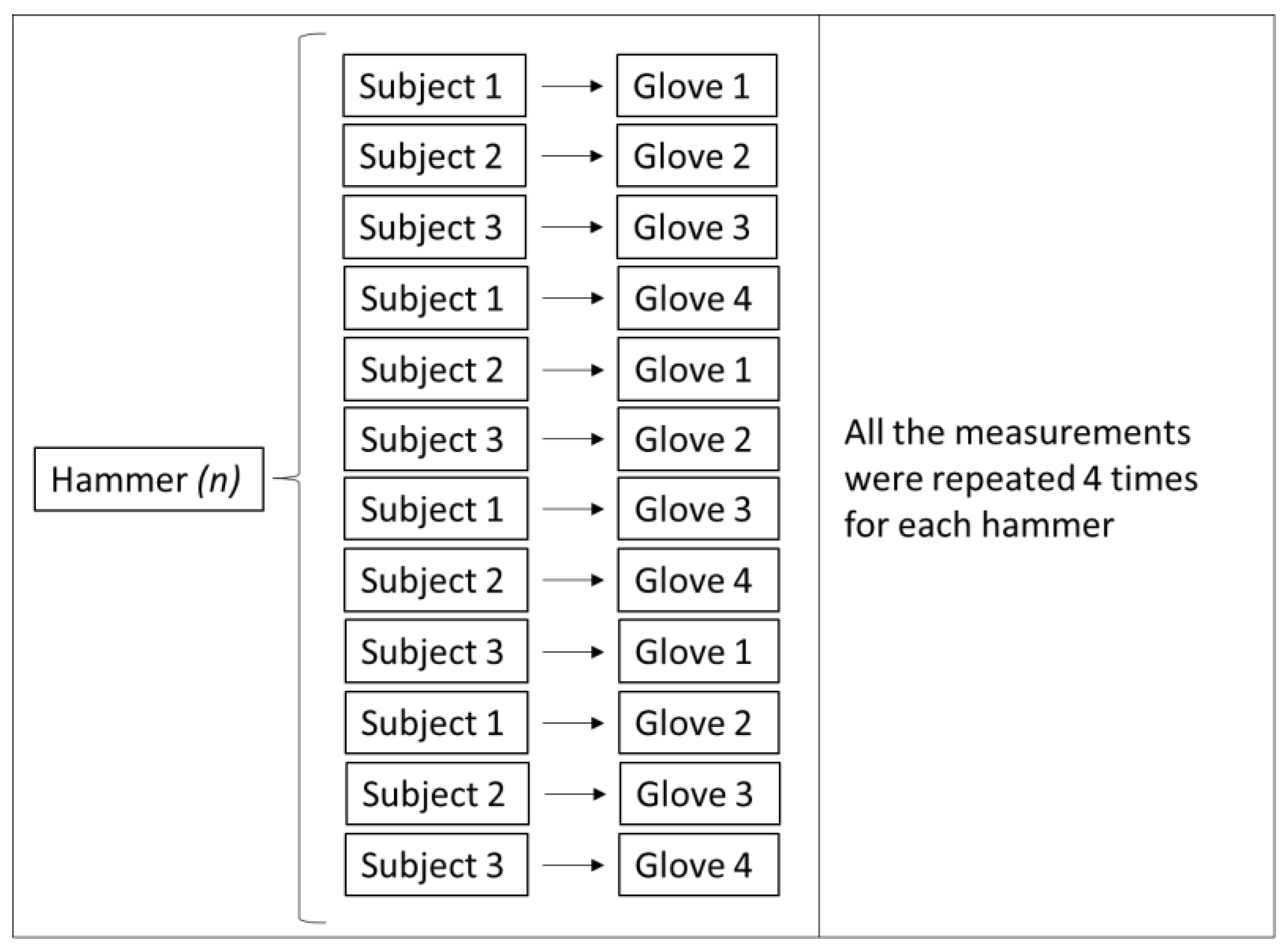
2.2. Experimental Activity
2.3. Data Analysis
- Tb(T)–Tb(M)–Tb(H) are the total–medium–high “bare-hand” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively;
- Abxi–abyi–abzi are the accelerations measured at i-th frequency on the bare hand for x-y-z-axis, respectively;
- Whi is the hand-arm weighted value for i-th frequency;
- aRxi–aRyi–aRzi are the accelerations measured at i-th frequency on the handle of the tool for x-y-z-axis, respectively;
- Td(T)–Td(M)–Td(H) are the total–medium–high “direct” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively;
- agxi–agyi–agzi are the accelerations measured at i-th frequency on the gloved hand for x-y-z axis, respectively;
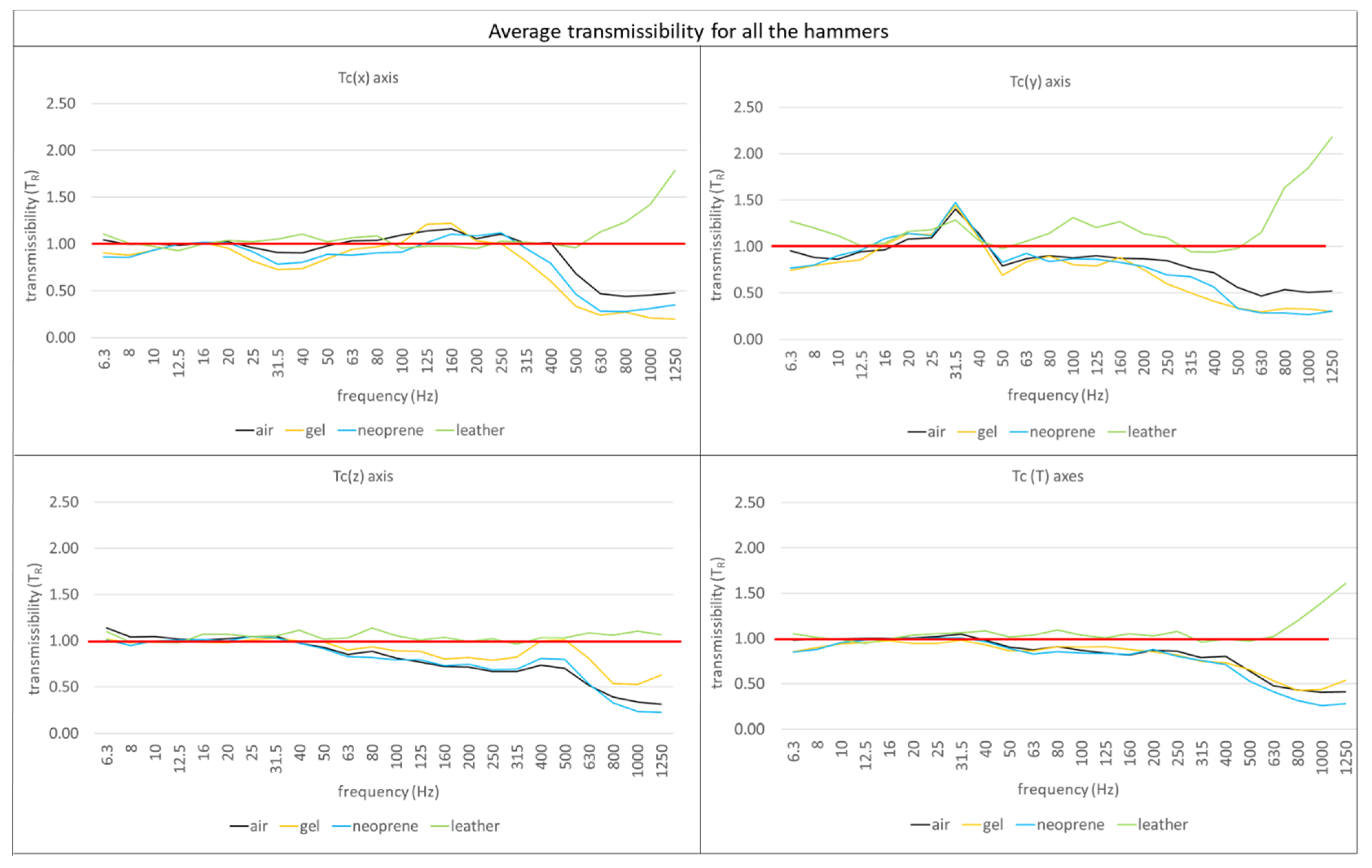
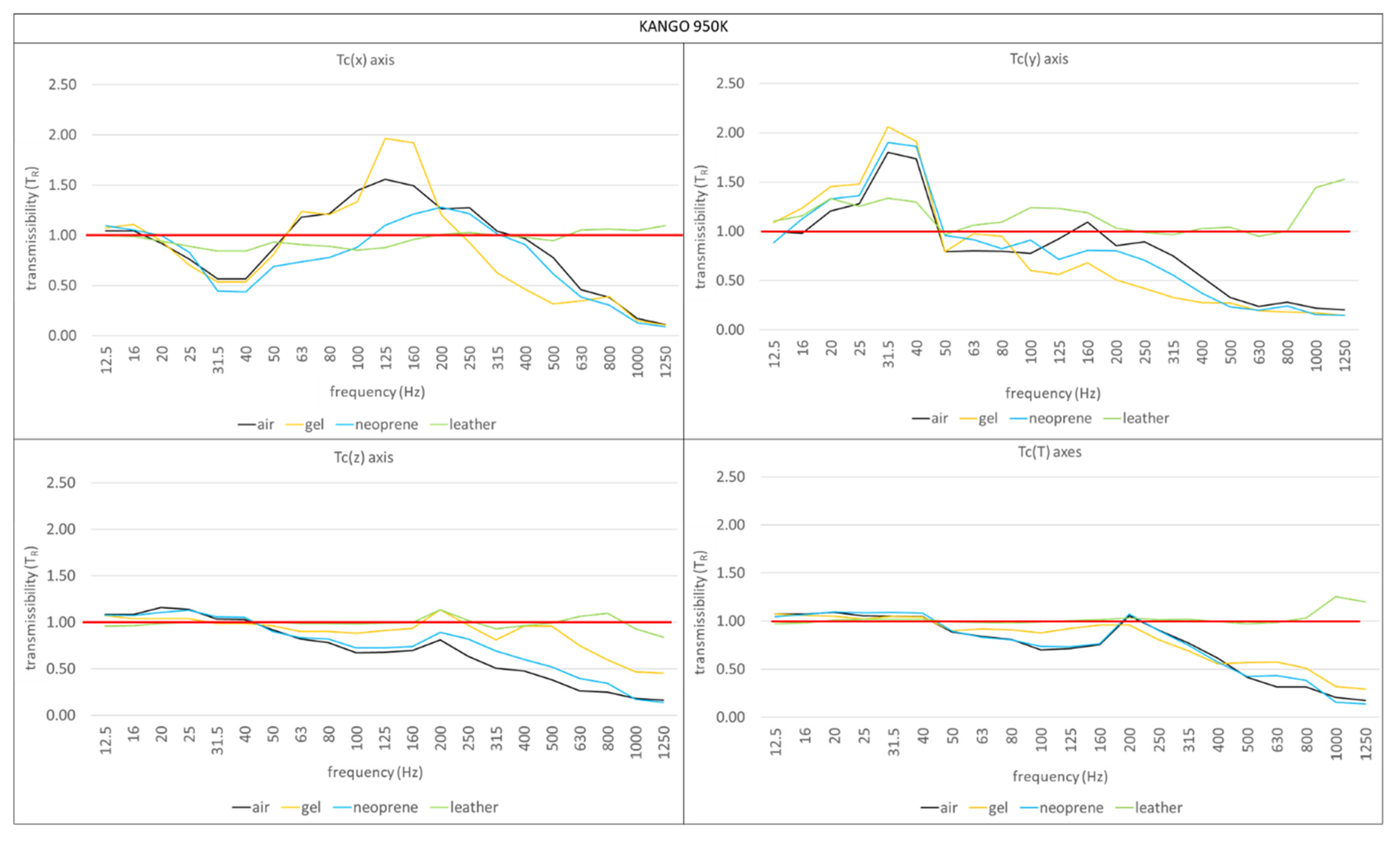
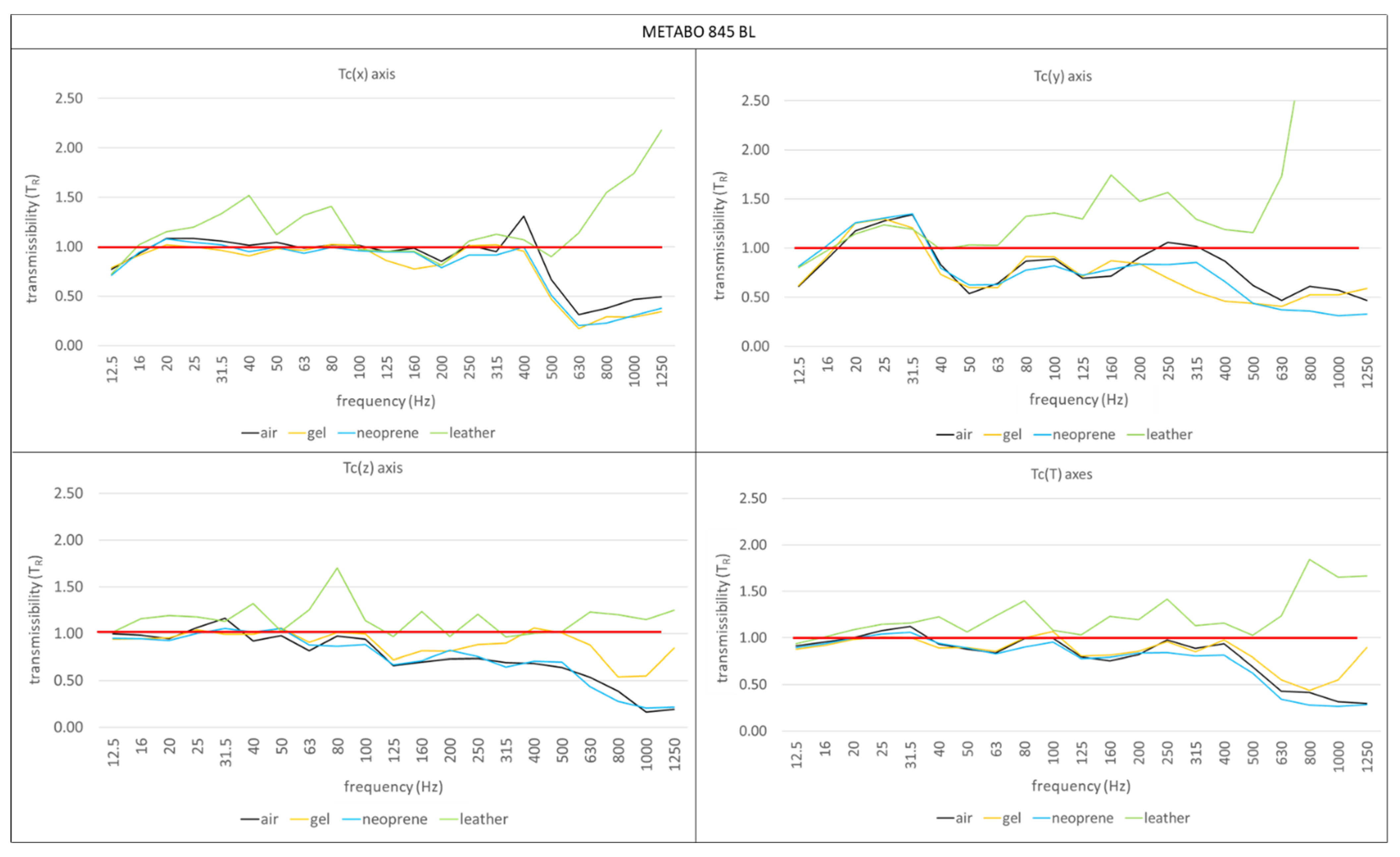
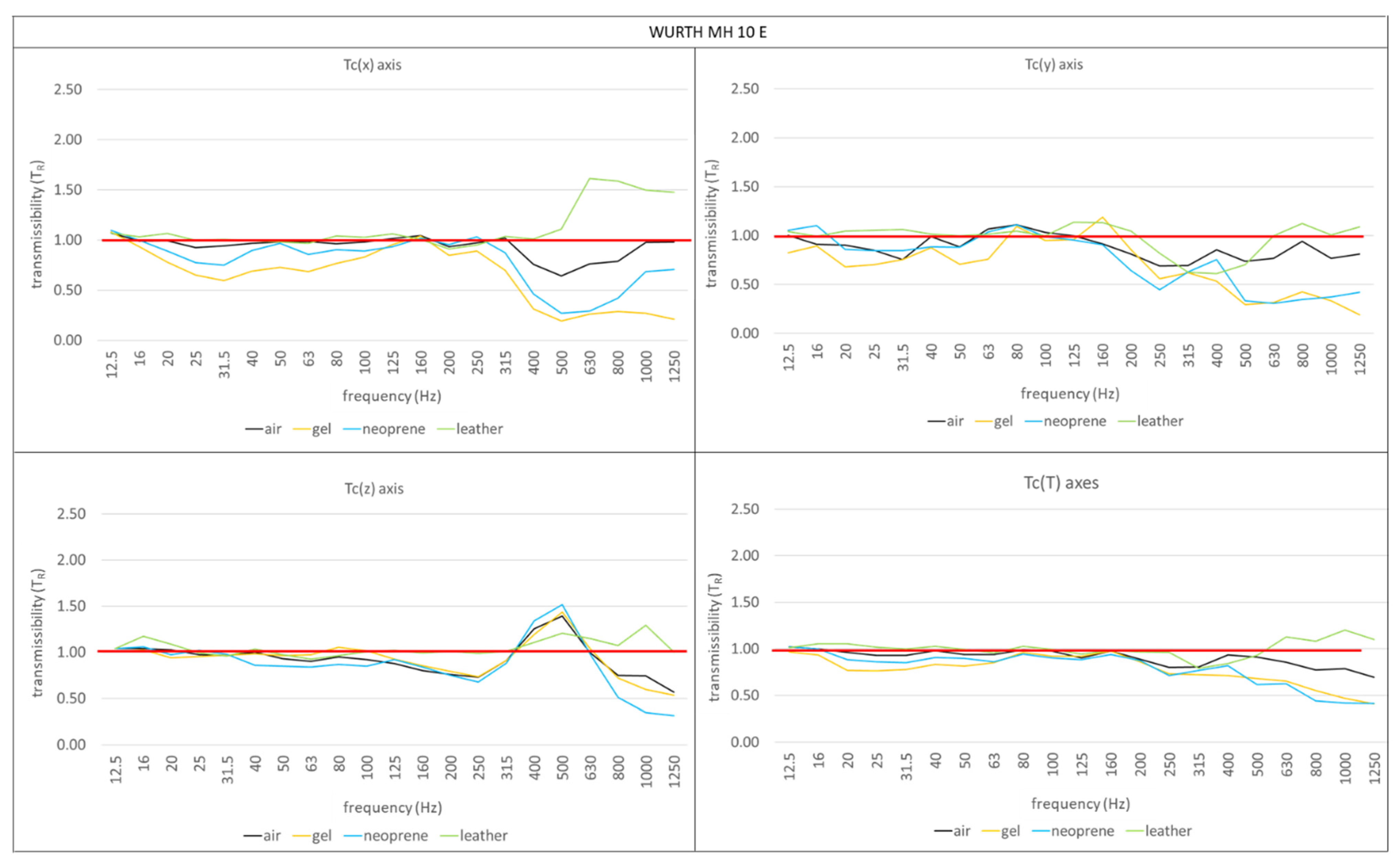
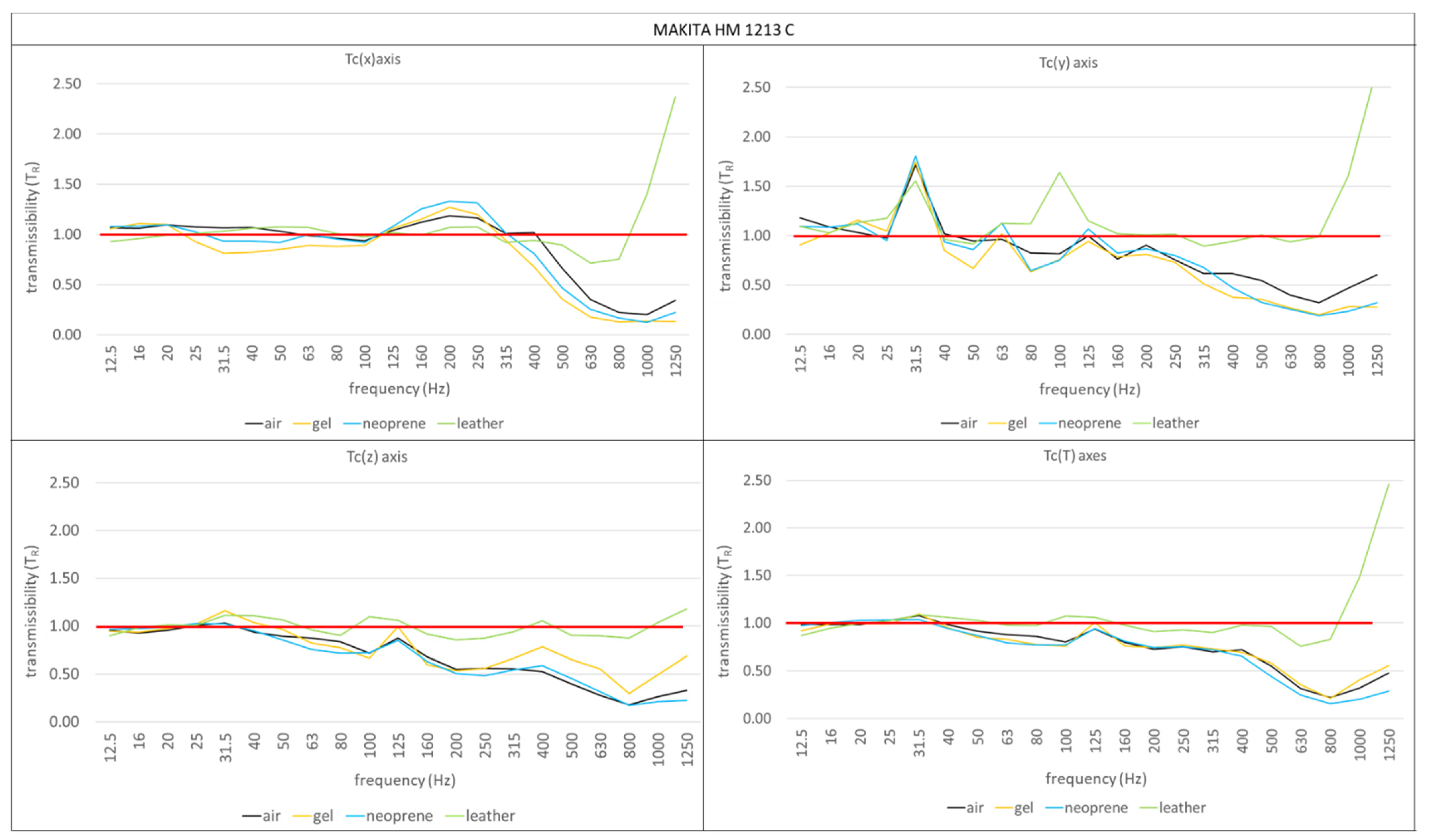
- Tc(T)–Tc(M)–Tc(H) are the total–medium–high “corrected” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively.
3. Results
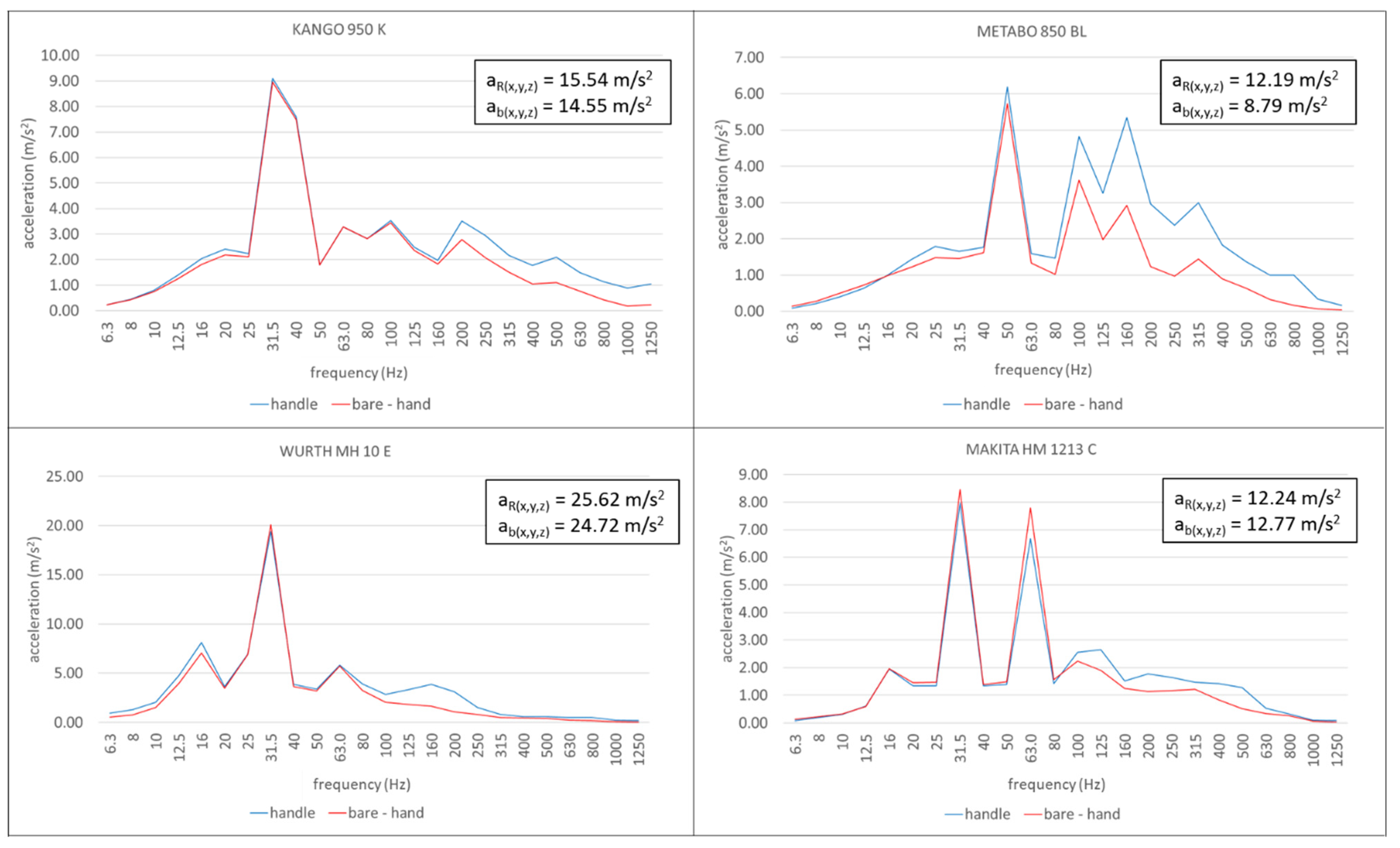
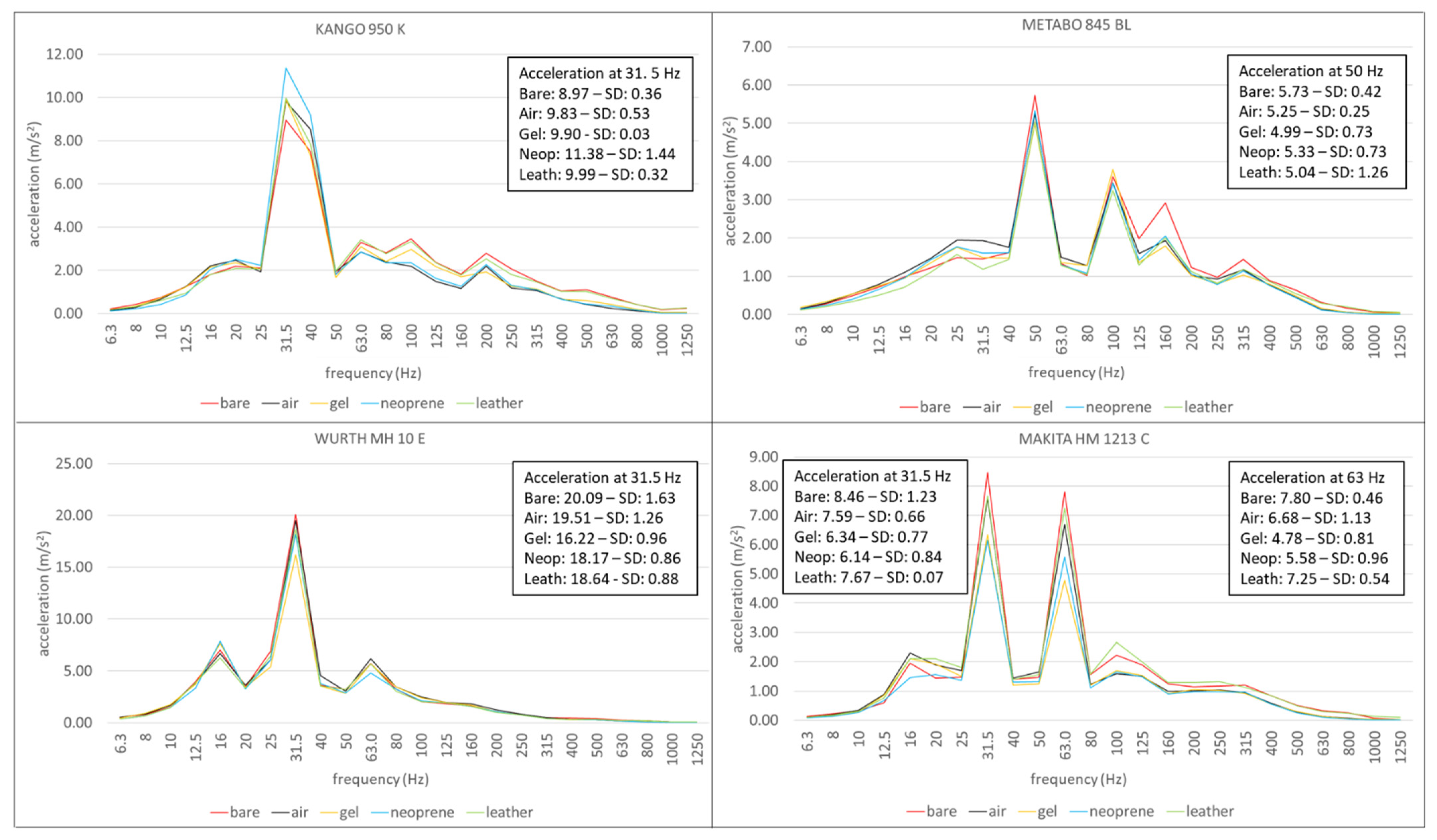
3.1. Hammers’ Vibration
3.2. Vibration Spectra Comparisons and Transmissibility
3.3. Transmissibility Spectra Analysis
3.3.1. Triaxial Spectra Analysis
3.3.2. Spectra Analysis among the Different Axes
4. Discussion
5. Conclusions
- -
- Investigations were carried out using the tools only in a vertical position, which is not fully representative of their real usage.
- -
- Only three workers were involved in the tests; this potentially results in imperfections regarding the estimation of the average transmissibility of the gloves.
- -
- Even though we intentionally reported the data of the hammers used in our investigations, some of the hammers had several years of usage, so their maintenance may not have been appropriate, resulting in a possible increase in the vibration produced.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Griffin, M.J. Measurement, evaluation, and assessment of occupational exposures to hand-transmitted vibration. J. Occup. Environ. Med. 1997, 54, 73–89. [Google Scholar] [CrossRef] [PubMed]
- Rempel, D.; Antonucci, A.; Barr, A.; Cooper, M.R.; Martin, B.; Neitzel, R.L. Pneumatic rock drills vs. electric hammer drill: Productivity, vibration, dust, and noise when drilling into concrete. Appl. Ergon. 2019, 74, 31–36. [Google Scholar] [CrossRef] [PubMed]
- Clarke, J.B.; Dalby, W.; Gunn, J.F. Chipping hammer vibration. Scand. J. Wok Environ. Health. 1986, 12, 351–354. [Google Scholar] [CrossRef] [PubMed]
- Antonucci, A.; Barr, A.; Martin, B.; Rempel, D. Effect of bit wear on hammer drill handle vibration and productivity. J. Occup. Environ. Hyg. 2017, 14, 640–649. [Google Scholar] [CrossRef] [PubMed]
- Akinlolu, M.; Haupt, T.C. The hand-arm vibration syndrome: A bibliometric co-occurrence analysis of neurological disorder in construction workers. In Proceedings of the 15th Built Environment Conference, Virtual online, 27–28 September 2021. [Google Scholar]
- Hagberg, M. Clinical assessment of musculoskeletal disorders in workers exposed to hand-arm vibration. Int. Arch. Occup. Environ. Health 2022, 75, 97–105. [Google Scholar] [CrossRef] [PubMed]
- Clemm, T.; Lunde, L.-K.; Ulvestad, B.; Faerden, K.; Nordby, K.-C. Exposure-response relationship between hand-arm vibration exposure and vibrotactile thresholds among rock drill operators: A 4-year cohort study. J. Occup. Environ. Med. 2022, 79, 775–781. [Google Scholar] [CrossRef]
- Reynolds, D.D.; Basel, R.; Wassermann, D.E.; Taylor, W. A study of hand vibration on chipping and grinding operators, part I: Vibration acceleration levels measured on pneumatic tools used in chipping and grinding operations. J. Sound Vib. 1984, 95, 479–497. [Google Scholar] [CrossRef]
- Griffin, M.J. Evaluating the effectiveness of gloves in reducing the hazards of hand-transmitted vibration. Occup. Environ. Med. 1998, 55, 340–348. [Google Scholar] [CrossRef]
- Alfaro Degan, G.; Antonucci, A.; Coltrinari, G.; Lippiello, D. Problems related to measuring the transmissibility of antivibration gloves: Possible efficacy for impact tools used in mining and quarrying activities. Int. J. Occup. Saf. Ergon. 2023, 29, 704–716. [Google Scholar] [CrossRef]
- Dong, R.G.; Welcome, D.E.; Peterson, D.R.; Xu, X.S.; McDowell, T.W.; Warren, C.; Asaki, T.; Kudernatsch, S.; Brammer, A. Tool-specific performance on vibration-reducing gloves for attenuating palm-transmitted vibrations in three orthogonal directions. Int. J. Ind. Ergon. 2014, 44, 827–839. [Google Scholar] [CrossRef]
- ISO 10819: 2013; Mechanical Vibration and Shock—Hand Arm Vibration—Method for Measurement and Evaluation of the Vibration Transmissibility of Gloves at the Palm of the Hand. International Standards Organization: Geneva, Switzerland, 2013.
- Dong, R.G.; McDowell, T.W.; Welcome, D.; Barkley, J.; Warren, C.; Washington, B. Effects of hand-tool coupling conditions on the isolation effectiveness of air bladder anti-vibration gloves. J. Low Freq. Noise Vib. Act. Control. 2004, 23, 231–248. [Google Scholar] [CrossRef]
- Hewitt, S.; Dong, R.G.; Welcome, D.E.; McDowell, T.W. Anti-vibration gloves? Ann. Occup. Hyg. 2015, 59, 127–141. [Google Scholar]
- Pinto, I.; Stacchini, N.; Bovenzi, M.; Paddan, G.S.; Griffin, M.J. Protection effectiveness of antivibration gloves: Field evaluation and laboratory performance assessment. In Proceedings of the 9th International Conference on Hand-Arm Vibration, Nantes, France, 5–8 June 2001. [Google Scholar]
- McDowell, T.W.; Dong, R.G.; Welcome, D.E.; Xueyan, S.X.; Warren, C. Vibration-reducing gloves: Transmissibility at the palm of the hand in three orthogonal directions. Ergonomics 2013, 56, 1823–1840. [Google Scholar] [CrossRef] [PubMed]
- Dong, R.G.; McDowell, T.W.; Welcome, D.E.; Smutz, W.P.; Schopper, A.W.; Warren, C.; Wu, J.Z.; Rakheja, S. On-the-hand measurement methods for assessing effectiveness of anti-vibration gloves. Int. J. Ind. Ergon. 2003, 32, 283–298. [Google Scholar] [CrossRef]
- Laszlo, H.E.; Griffin, M.J. The transmission of vibration through gloves: Effects of push force, vibration magnitude and inter-subject variability. Ergonomics 2011, 54, 488–496. [Google Scholar] [CrossRef] [PubMed]
- Wells, R.; Hunt, S.; Hurley, K.; Rosati, P. Laboratory assessment of the effect of heavy rubber glove thickness and sizing on effort, performance and comfort. Int. J. Ind. Ergon. 2010, 40, 386–391. [Google Scholar] [CrossRef]
- Yao, Y.; Rakheja, S.; Gauvin, C.; Marcotte, P.; Hamouda, K. Evaluation of effects of anti-vibration gloves on manual dexterity. Ergonomics 2018, 61, 1530–1544. [Google Scholar] [CrossRef]
- Dong, R.G.; Welcome, D.E.; McDowell, T.W.; Rakheja, S. Estimation of the transmissibility of anti-vibration gloves when used with specific tools. Noise Vib. Worldw. 2005, 9, 11–20. [Google Scholar] [CrossRef]
- Antonucci, A.; Coltrinari, G.; Nataletti, P.; Di Giovanni, R.; Lippiello, D. 3-D printed palm adaptors for hand-arm vibration measures. Transmissibility properties, and misalignment reduction when used with gloves. WIT Trans. Built Environ. 2021, 206, 163–174. [Google Scholar]
- Hewitt, S. Triaxial Measurements of the Performance of Anti-Vibration Gloves, 1st ed.; Health and Safety Executive (HSE): Buxton, UK, 2010; pp. 1–54. [Google Scholar]
- Rakheja, S.; Dong, R.G.; Welcome, D.E.; Schopper, A.W. Estimation of tool-specific isolation performance of anti-vibration gloves. Int. J. Ind. Ergon. 2022, 30, 71–87. [Google Scholar] [CrossRef]
- Dong, R.G.; McDowell, T.W.; Welcome, D.E.; Rakheja, S.; Caporali, S.A.; Schopper, A.W. Effectiveness of a transfer function method for evaluating vibration isolation performance of gloves when used with chipping hammers. J. Low Freq. Noise Vib. Active Control. 2002, 21, 141–155. [Google Scholar] [CrossRef]
- Dong, R.G.; Wu, J.Z.; Xu, X.S.; Welcome, D.E.; Krajnak, K. A review of hand-vibration studies conducted by US NIOSH since 2000. Vibration 2021, 4, 482–528. [Google Scholar] [PubMed]
- Antonucci, A.; Coltrinari, G.; Lippiello, D. Effectiveness of antivibration gloves when used with a light electric hammer. Differences among different methods of measurements. Int. J. Comp. Meth. and Exp. Meas. 2023, 11, 27–34. [Google Scholar]
- Clemm, T.; Nordby, K.C.; Lunde, L.K.; Ulvestad, B.; Bratveit, M. Hand-arm vibration exposure in rock drill workers: A comparison between measurements with hand-attached and tool-attached accelerometers. Ann. Work. Expo. Health 2021, 65, 1123–1132. [Google Scholar] [CrossRef]
- Boileau, P.É.; Rakheja, S.; Boutin, J. An interlaboratory evaluation of the vibration transmissibility of gloves following the ISO 10819 test method. Can. Acoust. 2001, 29, 18–19. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hammers Specifications | Wurth MH 10 E | Metabo KHEV 845 BL | Makita HM 1213 C | Kango 950 K | ||||
|---|---|---|---|---|---|---|---|---|
| Type | electro-pneumatic | electro-pneumatic | electro-pneumatic | electro-pneumatic | ||||
| Weight (kg) | 9.7 | 10.1 | 10.8 | 11.8 | ||||
| Power (W) | 1450 | 1500 | 1510 | 1700 | ||||
| Impact energy (J) | 23 | 12.2 | 18.6 | 20 | ||||
| Percussion frequency (Hz) | 31.5 | 50 | 31.6 | 32.5 | ||||
| Triaxial vibration (m/s2) | 10.4 * | (±2) | 10.5 * | (±2) | 7.0 * | (±2) | 11.0 * | (±2) |
| Antivibration system | no | yes | yes | no | ||||
| Usage (years) | 6 | new | 8 | unknown | ||||
| Conditions | middle | optimum | good | good | ||||
| Chisel type | SDS max flat | SDS max flat | SDS max flat | SDS max flat | ||||
| Chisel (mm) (width × length) | 25 × 450 | 25 × 380 | 25 × 450 | 25 × 450 | ||||
| Chisel conditions | new | new | new | new | ||||
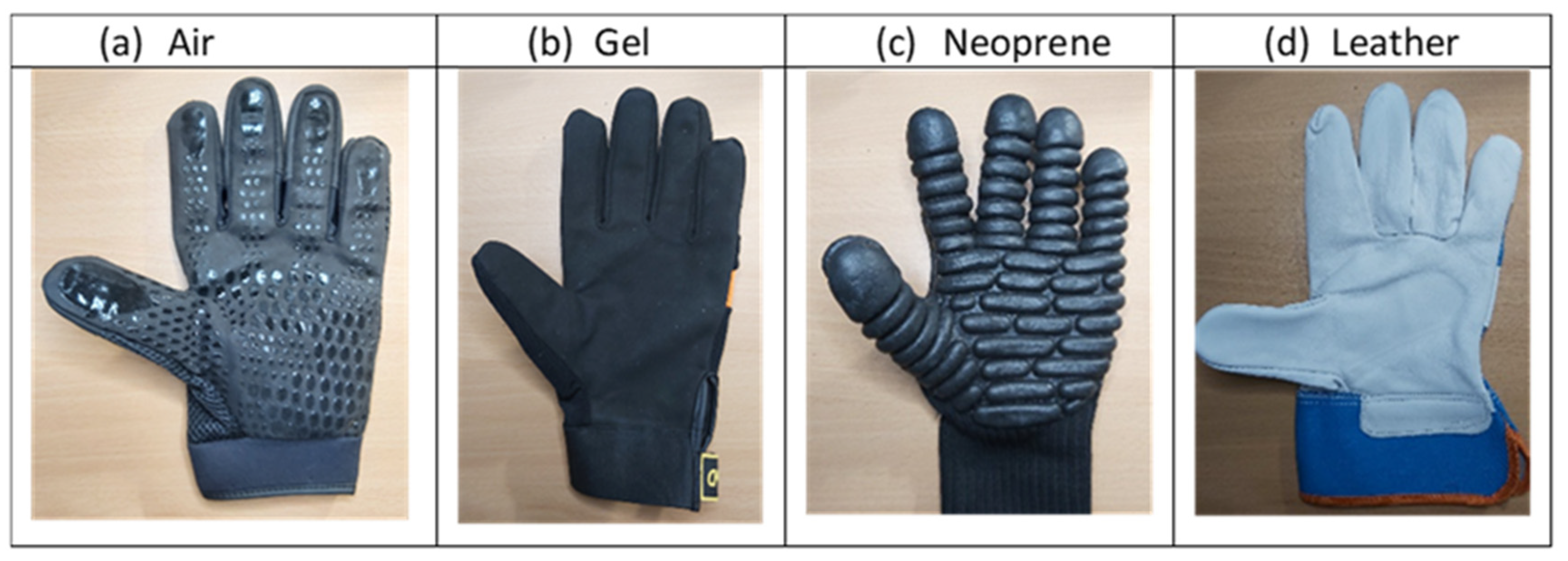
| Specifications | Glove (a) | Glove (b) | Glove (c) | Glove (d) | |
|---|---|---|---|---|---|
| Type (commercial name used in the text) | Air | Gel | Neoprene | Leather | |
| External layer | Material | Leather with rubber dots | Leather | Chloroprene rubber | Leather |
| Thickness (mm) | 1 | 1 | 7 | 1.5 | |
| Internal layer | Material | Multi-cells air bubbles | Gel bladder | Cotton | Fleece |
| Thickness (mm) | 7 | 5 | 1 | 1 | |
| Antivibration properties | Yes | Yes | Yes | No | |
| Certified antivibration ISO 10819:2013 | Yes | No | Yes | No | |
| Declared transmissibility (25–200 Hz) | 0.75 | - | 0.86 | - | |
| Declared transmissibility (200–1250 Hz) | 0.45 | - | 0.59 | - | |
| Subject | Age | Height (cm) | Weight (kg) | Hand Length (mm) | Hand Circumference (mm) | Gender |
|---|---|---|---|---|---|---|
| 1 | 49 | 180 | 81 | 177 | 198 | M |
| 2 | 28 | 178 | 73 | 163 | 220 | M |
| 3 | 43 | 183 | 84 | 179 | 201 | M |
| Tc(T) | S.D. | Tc(x) | S.D. | Tc(y) | S.D. | Tc(z) | S.D. | Tc(M-z) | S.D. | Tc(H-z) | S.D. | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| air | 0.96 | 0.07 | 0.95 | 0.12 | 0.98 | 0.37 | 0.94 | 0.10 | 0.94 | 0.09 | 0.65 | 0.18 |
| gel | 0.92 | 0.09 | 0.82 | 0.13 | 0.98 | 0.39 | 0.94 | 0.08 | 0.95 | 0.07 | 0.81 | 0.16 |
| neoprene | 0.93 | 0.10 | 0.86 | 0.13 | 1.04 | 0.44 | 0.92 | 0.10 | 0.93 | 0.10 | 0.68 | 0.13 |
| leather | 1.02 | 0.08 | 0.99 | 0.07 | 1.12 | 0.30 | 0.98 | 0.10 | 1.01 | 0.28 | 0.98 | 0.19 |
| KANGO 950 K | METABO 845 BL | WURTH MH 10 E | MAKITA HM 1213 C | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Air | Gel | Neo | Leath | Air | Gel | Neo | Leath | Air | Gel | Neo | Leath | Air | Gel | Neo | Leath | |
| Tc(T) | 1.02 | 1.01 | 1.05 | 1.02 | 0.93 | 0.95 | 0.90 | 1.06 | 0.94 | 0.81 | 0.87 | 1.00 | 0.94 | 0.91 | 0.87 | 1.00 |
| S.D. | 0.08 | 0.05 | 0.07 | 0.02 | 0.04 | 0.06 | 0.09 | 0.13 | 0.06 | 0.03 | 0.05 | 0.06 | 0.05 | 0.05 | 0.04 | 0.05 |
| Med. | 1.04 | 1.03 | 1.04 | 1.03 | 0.92 | 0.94 | 0.87 | 1.07 | 0.93 | 0.81 | 0.86 | 1.00 | 0.94 | 0.92 | 0.87 | 0.99 |
| Tc(x) | 0.80 | 0.75 | 0.70 | 0.91 | 1.01 | 0.97 | 0.97 | 1.03 | 0.95 | 0.69 | 0.81 | 1.00 | 1.03 | 0.89 | 0.95 | 1.02 |
| S.D. | 0.09 | 0.10 | 0.07 | 0.03 | 0.07 | 0.03 | 0.05 | 0.06 | 0.07 | 0.09 | 0.09 | 0.05 | 0.08 | 0.04 | 0.06 | 0.05 |
| Med. | 0.79 | 0.79 | 0.68 | 0.92 | 1.01 | 0.96 | 0.96 | 1.02 | 0.97 | 0.71 | 0.83 | 1.00 | 1.02 | 0.89 | 0.94 | 1.01 |
| Tc(y) | 1.34 | 1.45 | 1.60 | 1.25 | 0.71 | 0.74 | 0.74 | 1.10 | 0.81 | 0.76 | 0.88 | 0.96 | 1.06 | 0.99 | 0.95 | 1.16 |
| S.D. | 0.42 | 0.45 | 0.42 | 0.16 | 0.14 | 0.14 | 0.30 | 0.37 | 0.24 | 0.16 | 0.22 | 0.23 | 0.24 | 0.22 | 0.23 | 0.33 |
| Med. | 1.28 | 1.58 | 1.64 | 1.22 | 0.73 | 0.74 | 0.64 | 1.16 | 0.78 | 0.72 | 0.85 | 0.87 | 1.05 | 0.96 | 0.90 | 1.02 |
| Tc(z) | 0.99 | 0.97 | 1.01 | 0.99 | 0.92 | 0.96 | 0.92 | 0.99 | 0.96 | 0.94 | 0.95 | 0.98 | 0.87 | 0.88 | 0.81 | 0.97 |
| S.D. | 0.07 | 0.03 | 0.04 | 0.03 | 0.15 | 0.13 | 0.10 | 0.19 | 0.04 | 0.05 | 0.06 | 0.05 | 0.07 | 0.05 | 0.07 | 0.04 |
| Med. | 1.00 | 0.97 | 1.01 | 0.99 | 0.86 | 0.91 | 0.91 | 0.94 | 0.96 | 0.94 | 0.94 | 1.00 | 0.86 | 0.87 | 0.83 | 0.97 |
| Tc(M-z) | 0.99 | 0.97 | 1.01 | 1.00 | 0.92 | 0.97 | 0.94 | 1.11 | 0.95 | 0.96 | 0.95 | 0.96 | 0.89 | 0.91 | 0.82 | 0.98 |
| S.D. | 0.07 | 0.03 | 0.05 | 0.03 | 0.13 | 0.12 | 0.11 | 0.57 | 0.03 | 0.03 | 0.04 | 0.03 | 0.07 | 0.05 | 0.07 | 0.05 |
| Med. | 1.00 | 0.97 | 1.01 | 1.00 | 0.88 | 0.91 | 0.94 | 0.95 | 0.95 | 0.96 | 0.96 | 0.96 | 0.89 | 0.90 | 0.84 | 0.98 |
| Tc(H-z) | 0.56 | 0.93 | 0.70 | 1.02 | 0.70 | 0.89 | 0.72 | 0.99 | 0.80 | 0.84 | 0.79 | 1.03 | 0.54 | 0.59 | 0.51 | 0.87 |
| S.D. | 0.08 | 0.02 | 0.05 | 0.02 | 0.13 | 0.13 | 0.08 | 0.30 | 0.11 | 0.09 | 0.08 | 0.06 | 0.22 | 0.10 | 0.12 | 0.21 |
| Med. | 0.54 | 0.93 | 0.69 | 1.02 | 0.66 | 0.90 | 0.72 | 0.93 | 0.80 | 0.85 | 0.79 | 1.03 | 0.47 | 0.56 | 0.49 | 0.82 |
| HAMMER | Trial | SUBJECT 1 | SUBJECT 2 | SUBJECT 3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Air | Gel | Neo | Leath | Air | Gel | Neo | Leath | Air | Gel | Neo | Leath | ||
| Wurth MH 10 E | 1 | 0.90 | 0.84 | 0.93 | 0.99 | 1.00 | 0.83 | 0.96 | 1.10 | 0.96 | 0.80 | 0.86 | 1.05 |
| 2 | 0.83 | 0.72 | 0.81 | 0.91 | 0.96 | 0.83 | 0.86 | 1.05 | 0.92 | 0.81 | 0.86 | 1.06 | |
| 3 | 0.94 | 0.81 | 0.88 | 1.00 | 0.97 | 0.84 | 0.84 | 0.93 | 0.92 | 0.79 | 0.89 | 0.99 | |
| 4 | 1.08 | 0.82 | 0.93 | 1.08 | 0.90 | 0.82 | 0.86 | 0.92 | 0.89 | 0.79 | 0.79 | 0.95 | |
| Metabo 845 BL | 1 | 0.97 | 0.95 | 0.86 | 0.91 | 0.98 | 0.99 | 0.85 | 0.98 | 0.92 | 0.98 | 0.97 | 1.14 |
| 2 | 0.91 | 0.94 | 0.80 | 1.01 | 0.87 | 0.96 | 0.75 | 1.38 | 0.89 | 0.81 | 0.99 | 1.07 | |
| 3 | 0.92 | 1.04 | 0.87 | 0.88 | 0.94 | 1.06 | 0.88 | 1.07 | 0.90 | 0.90 | 1.07 | 1.17 | |
| 4 | 0.99 | 0.91 | 0.82 | 0.97 | 0.96 | 0.94 | 1.03 | 1.10 | 0.90 | 0.90 | 0.96 | 1.12 | |
| Makita HM 1213C | 1 | 1.07 | 0.99 | 0.87 | 1.08 | 0.94 | 0.87 | 0.87 | 0.97 | 0.94 | 0.82 | 0.82 | 0.94 |
| 2 | 0.91 | 0.96 | 0.80 | 1.01 | 0.90 | 0.86 | 0.87 | 0.96 | 0.95 | 0.93 | 0.94 | 1.09 | |
| 3 | 0.86 | 0.87 | 0.82 | 0.94 | 0.96 | 0.91 | 0.92 | 1.00 | 0.95 | 0.96 | 0.84 | 1.04 | |
| 4 | 0.92 | 0.93 | 0.92 | 0.97 | 0.93 | 0.92 | 0.91 | 0.95 | 1.00 | 0.89 | 0.87 | 1.05 | |
| Kango 850 K | 1 | 1.14 | 1.09 | 1.07 | 0.99 | 1.08 | 1.03 | 1.06 | 1.04 | 0.91 | 0.94 | 0.95 | 1.00 |
| 2 | 1.11 | 1.06 | 1.17 | 1.02 | 1.04 | 1.03 | 1.13 | 1.04 | 0.94 | 0.94 | 0.99 | 1.03 | |
| 3 | 1.05 | 1.05 | 1.10 | 1.04 | 0.90 | 0.95 | 1.16 | 0.98 | 0.97 | 1.07 | 1.01 | 1.02 | |
| 4 | 1.07 | 1.02 | 1.03 | 1.04 | 0.93 | 0.95 | 0.98 | 0.99 | 1.05 | 1.05 | 0.98 | 1.04 | |
| Average Tc(T) | 0.98 | 0.94 | 0.92 | 0.99 | 0.95 | 0.92 | 0.93 | 1.03 | 0.94 | 0.90 | 0.92 | 1.05 | |
| S.D. | 0.09 | 0.10 | 0.12 | 0.06 | 0.05 | 0.08 | 0.11 | 0.11 | 0.04 | 0.09 | 0.08 | 0.06 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alfaro Degan, G.; Antonucci, A.; Lippiello, D. Efficacy of Antivibration Gloves When Used with Electric Hammers of about 10 kg for Chiseling Limestone Rocks. Safety 2023, 9, 27. https://doi.org/10.3390/safety9020027
Alfaro Degan G, Antonucci A, Lippiello D. Efficacy of Antivibration Gloves When Used with Electric Hammers of about 10 kg for Chiseling Limestone Rocks. Safety. 2023; 9(2):27. https://doi.org/10.3390/safety9020027
Chicago/Turabian StyleAlfaro Degan, Guido, Andrea Antonucci, and Dario Lippiello. 2023. "Efficacy of Antivibration Gloves When Used with Electric Hammers of about 10 kg for Chiseling Limestone Rocks" Safety 9, no. 2: 27. https://doi.org/10.3390/safety9020027