

Perceptual Translucency in 3D Printing Using Surface Texture

Abstract
:1. Introduction
2. Related Works
2.1. Color Fabrication
2.2. Fabrication of Translucency
2.3. Perception of Translucency
3. Making Textures for Perceptual Translucency
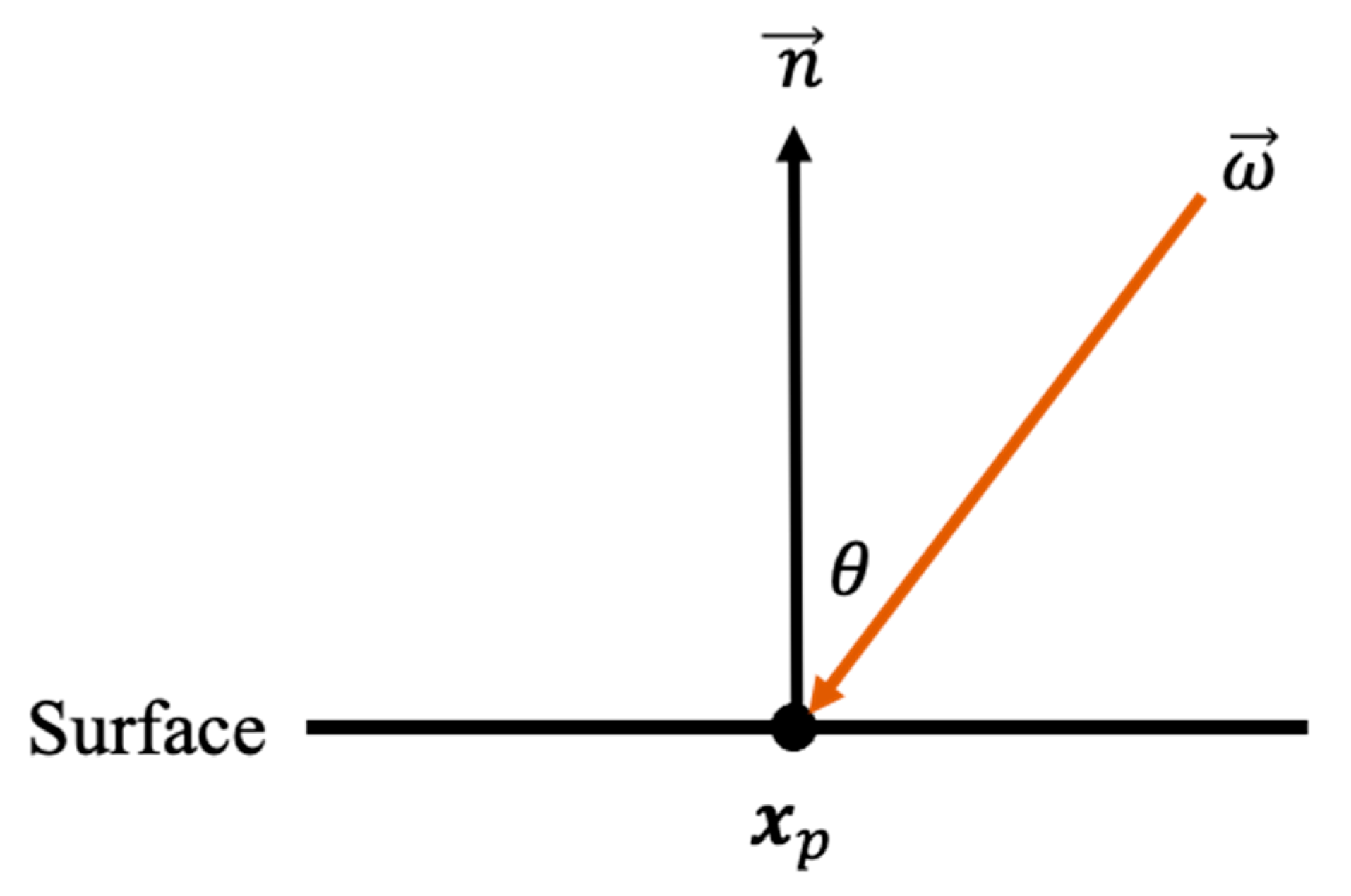
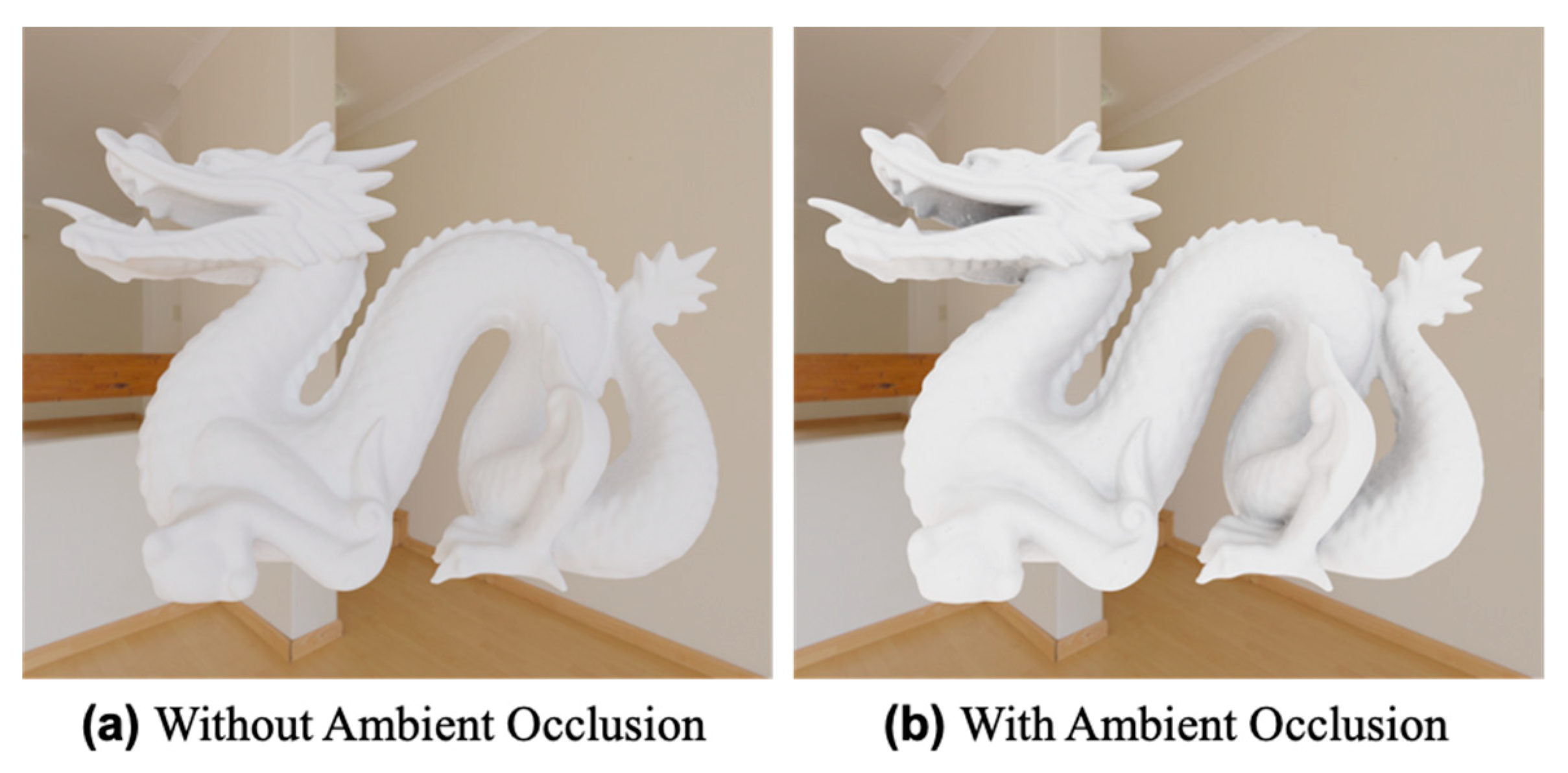
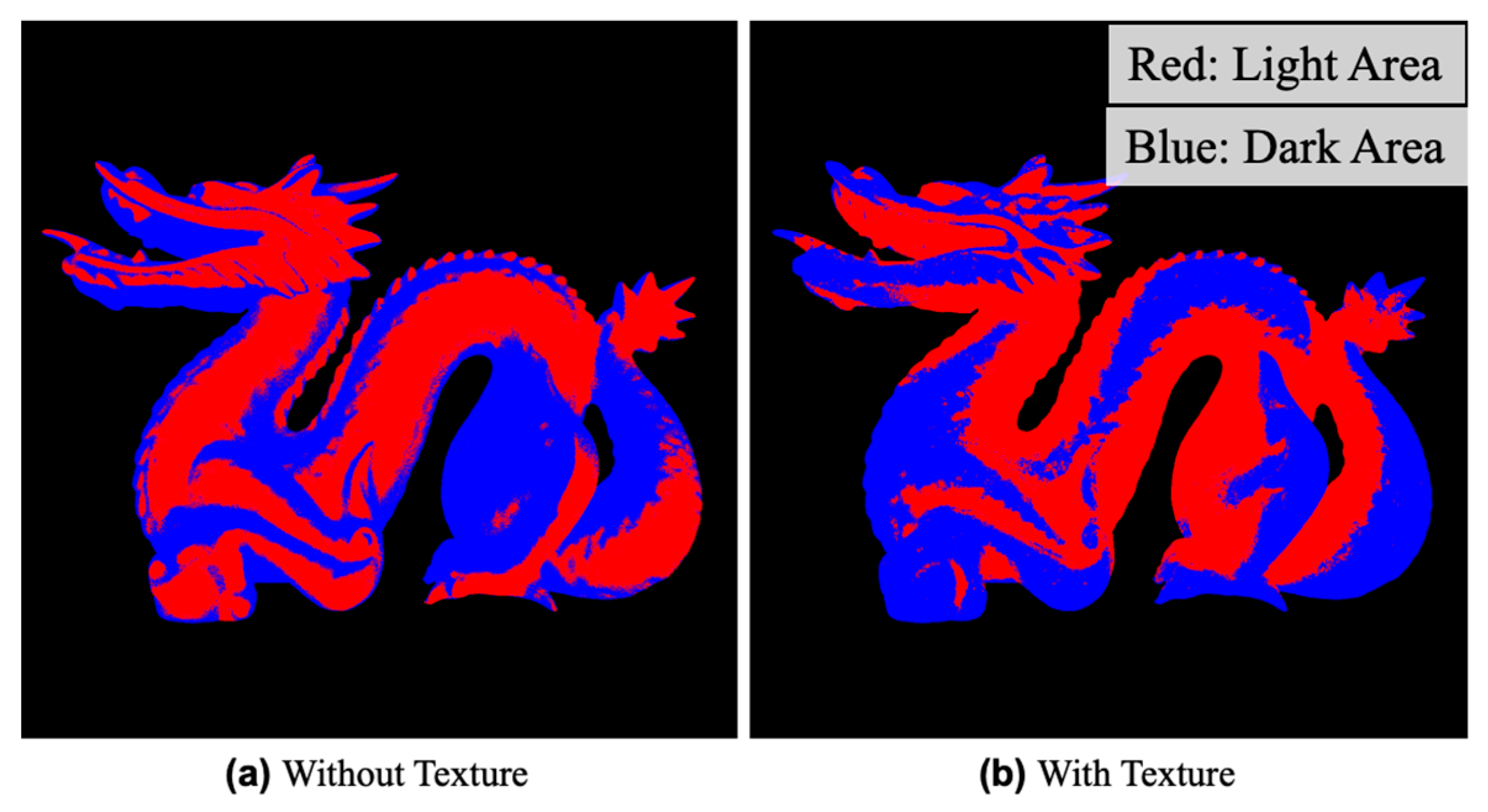
3.1. Ambient Occlusion
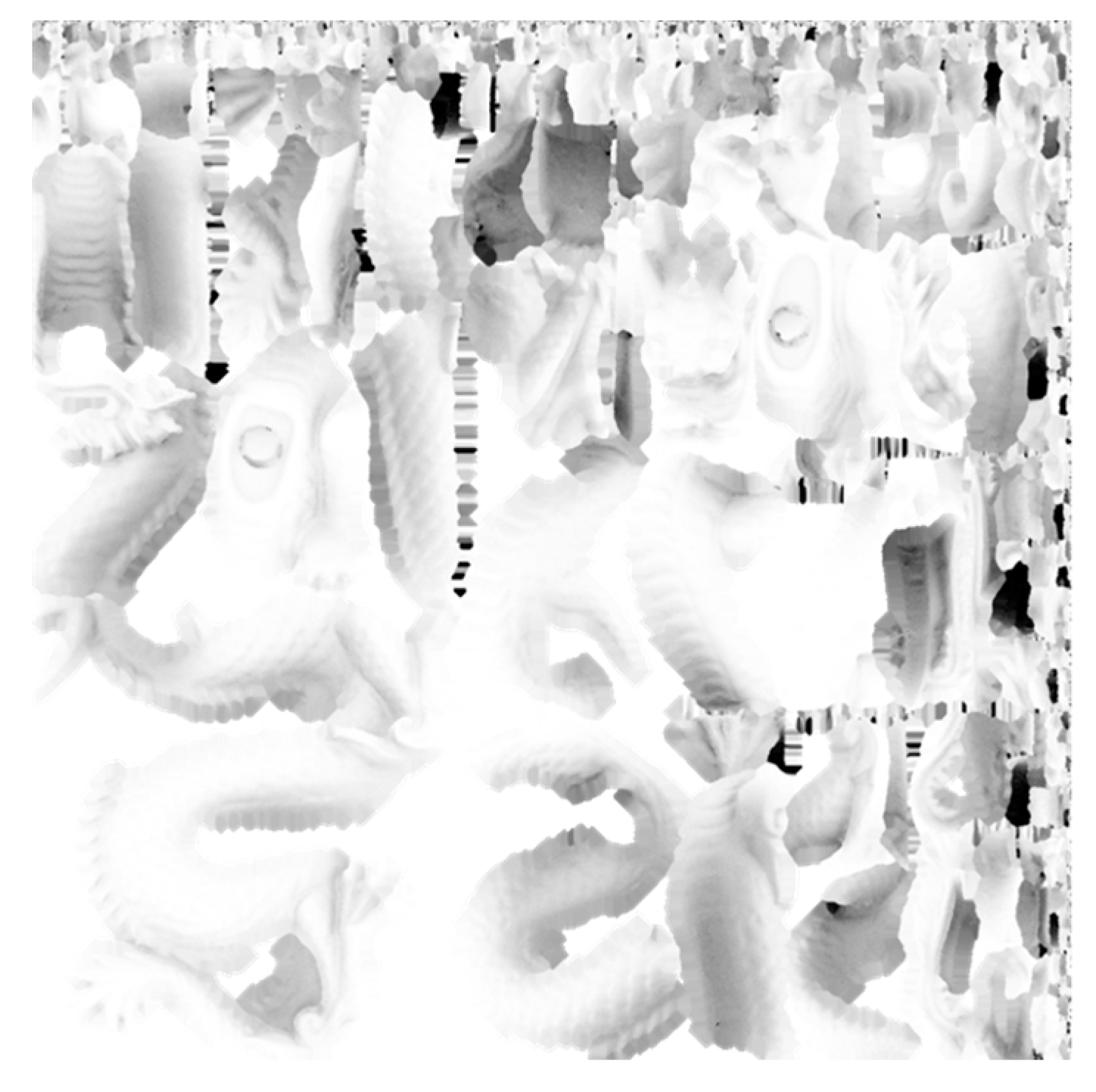
3.2. Texture Processing
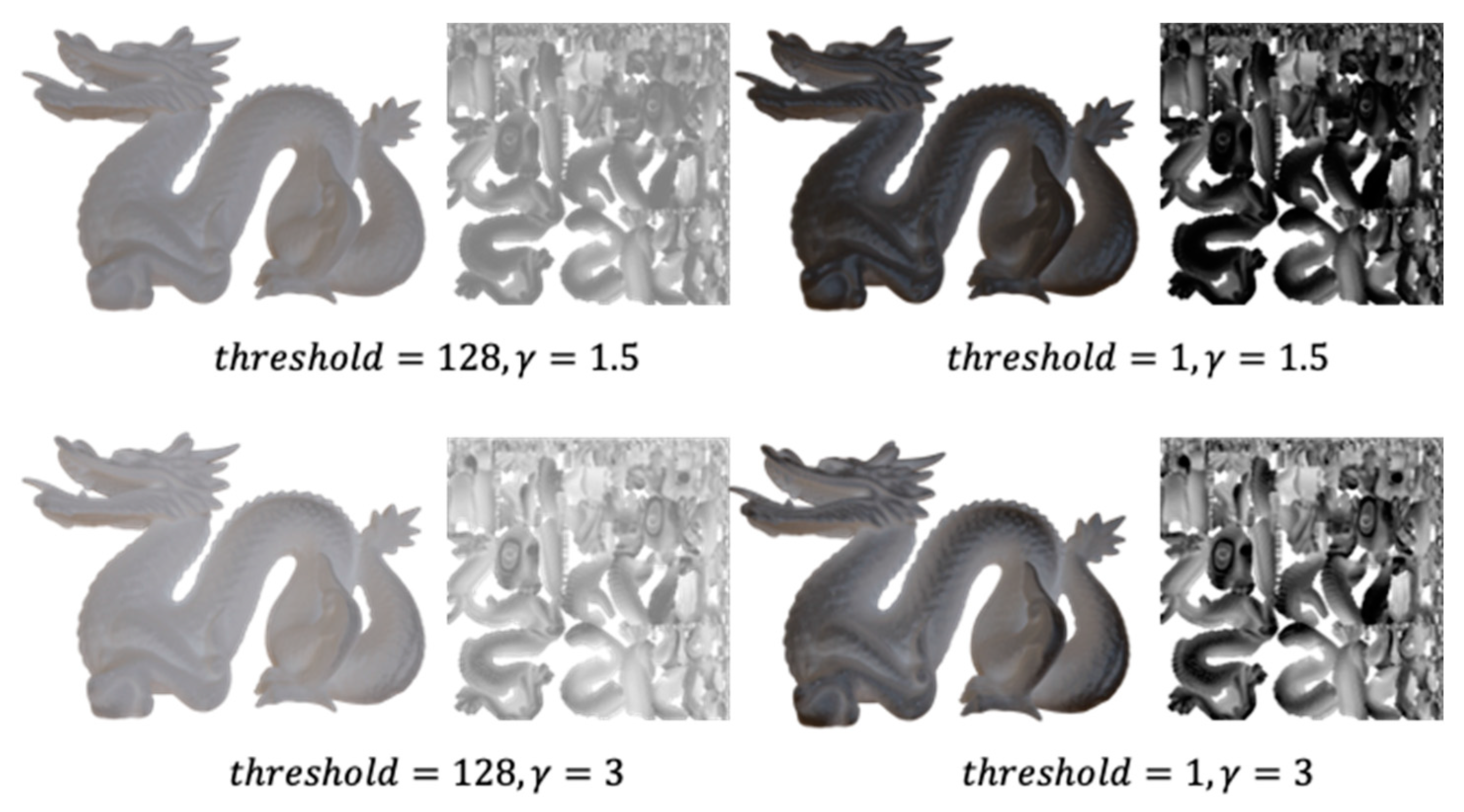
3.3. Setting Parameters
4. Experiment
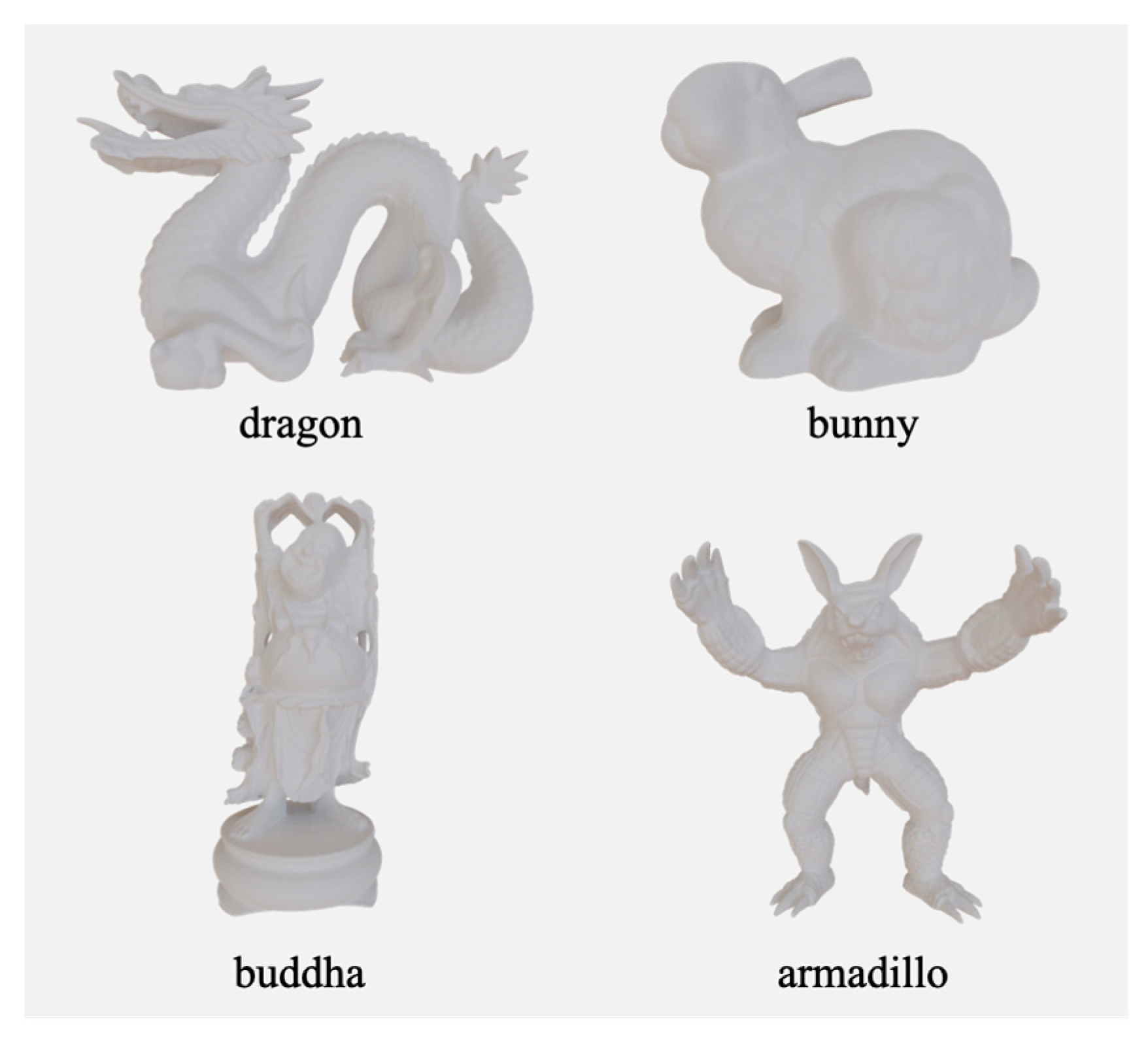
4.1. Fabrication of Samples
4.2. Experimental Design
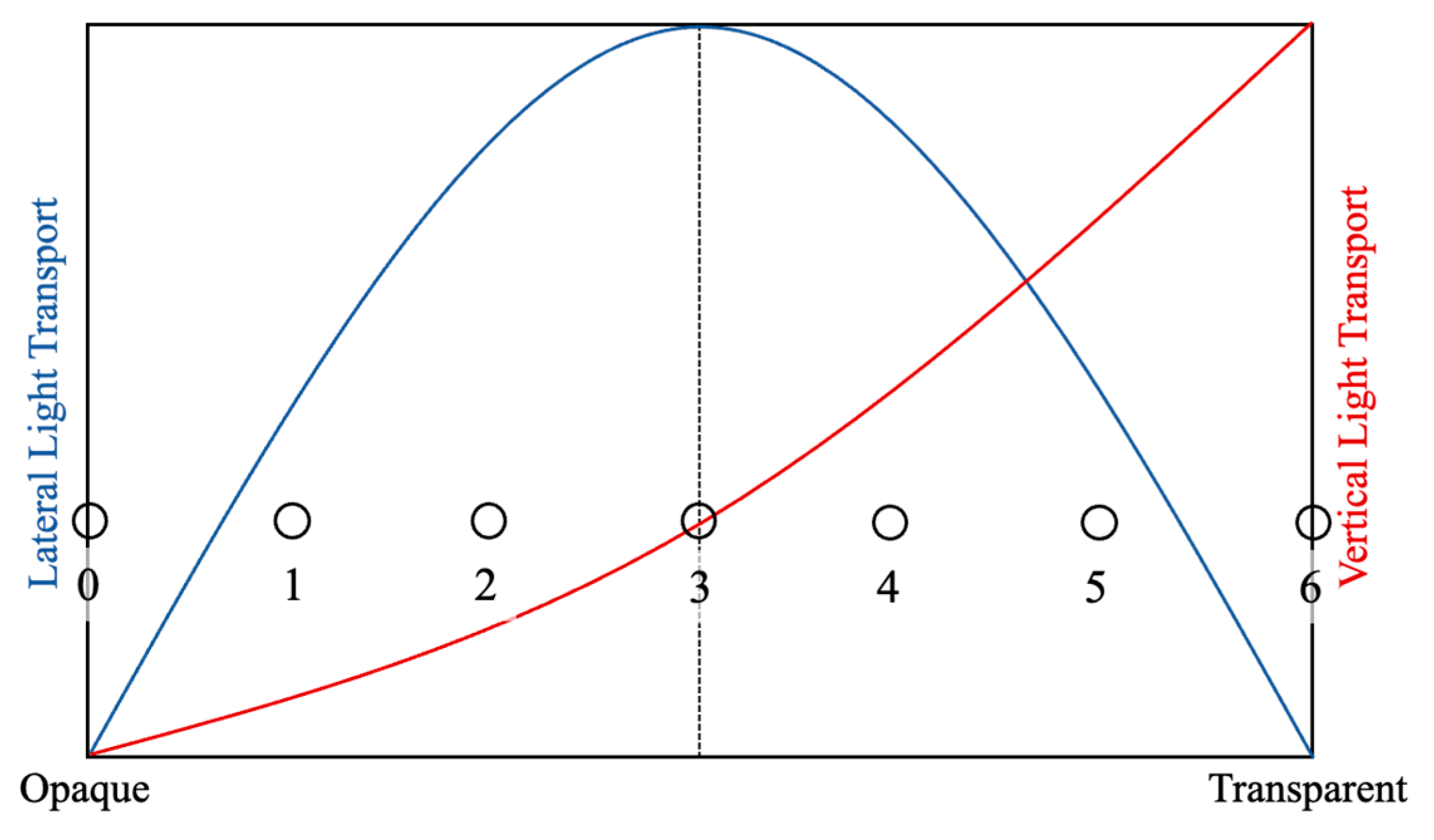
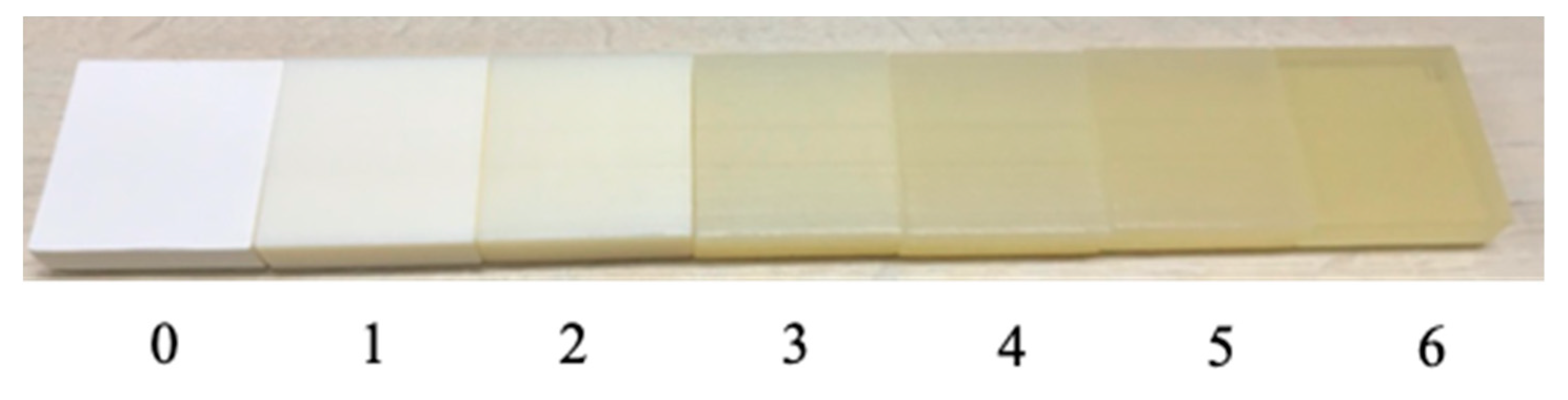
4.2.1. Scale of Translucency
4.2.2. Lighting Environment
4.2.3. Observation Conditions
4.2.4. Experimental Setup
4.3. Results
4.4. Discussion
5. Limitations
6. Conclusions and Future Works
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gigilashvili, D.; Thomas, J.-B.; Hardeberg, J.Y.; Pedersen, M. Translucency perception: A review. J. Vis. 2021, 21, 4. [Google Scholar] [CrossRef] [PubMed]
- Nicodemus, F.E.; Richmond, J.C.; Hsia, J.J.; Ginsberg, I.W.; Limperis, T. Geometrical considerations and nomenclature for reflectance. United States. Natl. Bur. Stand. 1977, 160, 1–52. [Google Scholar]
- Jensen, H.W.; Marschner, S.R.; Levoy, M.; Hanrahan, P. A practical model for subsurface light transport. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 12–17 August 2001; pp. 511–518. [Google Scholar]
- Igarashi, K.I.T.; Ojima, N.; Ogawa-Ochiai, K.; Tsumura, N. Spectral-based estimation of components concentration in skin tissue layers with independence of shading via optical modeling of skin tissue. Artif. Life Robot. 2022, 27, 9–18. [Google Scholar]
- Donner, C.; Jensen, H.W. Light Diffusion in Multi-Layered Translucent Materials. ACM Trans. Graph. (ToG) 2005, 24, 1032–1039. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Pellacini, F.; Tong, X.; Guo, B. Fabricating spatially-varying subsurface scattering. ACM Trans. Graph. (ToG) 2010, 29, 62. [Google Scholar] [CrossRef]
- Hašan, M.; Fuchs, M.; Matusik, W.; Pfister, H.; Rusinkiewicz, S. Physical Reproduction of Materials with Specified Subsurface Scattering. ACM Trans. Graph. (ToG) 2010, 61, 1–10. [Google Scholar] [CrossRef]
- Papas, M.; Regg, C.; Jarosz, W.; Bickel, B.; Jackson, P.; Matusik, W.; Marschner, S.; Gross, M. Fabricating translucent materials using continuous pigment mixtures. ACM Trans. Graph. (ToG) 2013, 32, 146. [Google Scholar] [CrossRef]
- Takatani, T.; Fujita, K.; Tanaka, K.; Funatomi, T.; Mukaigawa, Y. Controlling translucency by UV printing on a translucent object. IPSJ Trans. Comput. Vis. Appl. 2018, 10, 7. [Google Scholar] [CrossRef]
- Brunton, A.; Arikan, C.A.; Tanksale, T.M.; Urban, P. 3D printing spatially varying color and translucency. ACM Trans. Graph. (ToG) 2018, 37, 157. [Google Scholar] [CrossRef]
- Urban, P.; Tanksale, T.M.; Brunton, A.; Vu, B.M.; Nakauchi, S. Redefining A in RGBA: Towards a Standard for Graphical 3D Printing. ACM Trans. Graph. (ToG) 2019, 38, 21. [Google Scholar] [CrossRef]
- Motoyoshi, I. Highlight-shading relationship as a cue for the perception of translucent and transparent materials. J. Vis. 2010, 10, 6. [Google Scholar] [CrossRef]
- Marlow, P.J.; Kim, J.; Anderson, B.L. Perception and misperception of surface opacity. Proc. Natl. Acad. Sci. USA 2017, 114, 13840–13845. [Google Scholar] [CrossRef] [PubMed]
- Landis, H. Production-ready global illumination. Siggraph Course Notes 2002, 16, 11. [Google Scholar]
- Stratasys|3D Printers. Available online: https://www.stratasys.com/en/3d-printers/printer-catalog/ (accessed on 18 May 2023).
- Brunton, A.; Arikan, C.A.; Urban, P. Pushing the Limits of 3D Color Printing: Error Diffusion with Translucent Materials. ACM Trans. Graph. (ToG) 2015, 35, 1–13. [Google Scholar] [CrossRef]
- Elek, O.; Sumin, D.; Zhang, R.; Weyrich, T.; Myszkowski, K.; Bickel, B.; Wilkie, A.; Křivánek, J. Scattering-aware texture reproduction for 3D printing. ACM Trans. Graph. (ToG) 2017, 36, 241. [Google Scholar] [CrossRef]
- Sumin, D.; Rittig, T.; Babaei, V.; Nindel, T.; Wilkie, A.; Didyk, P.; Bickel, B.; Křivánek, J.; Myszkowski, K.; Weyrich, T. Geometry-aware scattering compensation for 3D printing. ACM Trans. Graph. (ToG) 2019, 38, 111. [Google Scholar] [CrossRef]
- Rittig, T.; Sumin, D.; Babaei, V.; Didyk, P.; Voloboy, A.; Wilkie, A.; Bickel, B.; Myszkowski, K.; Weyrich, T.; Křivánek, J. Neural Acceleration of Scattering-Aware Color 3D Printing. Comput. Graph. Forum 2021, 40, 205–219. [Google Scholar] [CrossRef]
- Babaei, V.; Vidimče, K.; Foshey, M.; Kaspar, A.; Didyk, P.; Matusik, W. Color contoning for 3D printing. ACM Trans. Graph. (ToG) 2017, 36, 1–15. [Google Scholar] [CrossRef]
- Shi, L.; Babaei, V.; Kim, C.; Foshey, M.; Hu, Y.; Sitthi-Amorn, P.; Rusinkiewicz, S.; Matusik, W. Deep multispectral painting reproduction via multi-layer, custom-ink printing. ACM Trans. Graph. (ToG) 2018, 37, 271:1–271:15. [Google Scholar] [CrossRef]
- Mimaki Engineering|3DUJ-553. Available online: https://japan.mimaki.com/product/3d/3d-inkjet/3duj-553/ (accessed on 18 May 2023).
- Nagasawa, K.; Yoshii, J.; Yamamoto, S.; Arai, W.; Kaneko, S.; Hirai, K.; Tsumura, N. Prediction of the layered ink layout for 3D printers considering a desired skin color and line spread function. Opt. Rev. 2021, 28, 449–461. [Google Scholar] [CrossRef]
- Nagasawa, K.; Fukumoto, K.; Arai, W.; Hakkaku, K.; Kaneko, S.; Hirai, K.; Tsumura, N. Layout Estimation for Layered Ink of 3D Printer to Reproduce the Desired Line Spread Function of Skin using Simulated Data1. J. Imaging Sci. Technol. 2021, 65, 50501-1–50501-12. [Google Scholar] [CrossRef]
- Nagasawa, K.; Yamamoto, S.; Arai, W.; Hakkaku, K.; Koopipat, C.; Hirai, K.; Tsumura, N. Fabrication of a Human Skin Mockup with a Multilayered Concentration Map of Pigment Components Using a UV Printer. J. Imaging 2022, 8, 73. [Google Scholar] [CrossRef] [PubMed]
- D’zmura, M.; Iverson, G. Color constancy I Basic theory of two-stage linear recovery of spectral descriptions for lights and surfaces. J. Opt. Soc. Am. A 1993, 10, 2148–2165. [Google Scholar] [CrossRef] [PubMed]
- Pizlo, Z. Perception viewed as an inverse problem. Vis. Res. 2001, 41, 3145–3161. [Google Scholar] [CrossRef] [PubMed]
- Chadwick, A.; Kentridge, R. The perception of gloss: A review. Vis. Res. 2015, 109, 221–235. [Google Scholar] [CrossRef]
- Fleming, R.W.; Bülthoff, H.H. Low-Level Image Cues in the Perception of Translucent Materials. ACM Trans. Appl. Percept. 2005, 2, 346–382. [Google Scholar] [CrossRef]
- Motoyoshi, I.; Nishida, S.; Sharan, L.; Adelson, E.H. Image statistics and the perception of surface qualities. Nature 2007, 447, 206–209. [Google Scholar] [CrossRef]
- Gkioulekas, I.; Xiao, B.; Zhao, S.; Adelson, E.H.; Zickler, T.; Bala, K. Understanding the role of phase function in translucent appearance. ACM Trans. Graph. (ToG) 2013, 32, 1–19. [Google Scholar] [CrossRef]
- Xiao, B.; Walter, B.; Gkioukelas, I.; Zickler, T.; Adelson, E.; Bala, K. Looking against the light: How perception of translucency depends on lighting direction and phase function. J. Vis. 2014, 14, 1316. [Google Scholar] [CrossRef]
- Nagai, T.; Ono, Y.; Tani, Y.; Koida, K.; Kitazaki, M.; Nakauchi, S. Image Regions Contributing to Perceptual Translucency: A Psychophysical Reverse-Correlation Study. I-Perception 2013, 4, 407–428. [Google Scholar] [CrossRef]
- Gkioulekas, I.; Walter, B.; Adelson, E.H.; Bala, K.; Zickler, T. On the Appearance of Translucent Edges. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5528–5536. [Google Scholar]
- Vu, M.B.; Urban, P.; Tanksale, M.T.; Nakauchi, S. Visual perception of 3D printed translucent objects. In Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2016; Volume 2016, pp. 94–99. [Google Scholar]
- Gigilashvili, D.; Thomas, B.J.; Pedersen, M.; Hardeberg, Y.J. On the appearance of objects and materials: Qualitative analysis of experimental observations. J. Int. Colour Assoc. 2021, 27, 26–55. [Google Scholar]
- Kiyokawa, H.; Nagai, T.; Yamauchi, Y.; Kim, J. The perception of translucency from surface gloss. Vis. Res. 2023, 205, 108140. [Google Scholar] [CrossRef] [PubMed]
- Blender.org. Available online: https://www.blender.org/ (accessed on 18 May 2023).
- Ambient Occlusion|Blender Manual. Available online: https://docs.blender.org/manual/en/latest/render/shader_nodes/input/ao.html (accessed on 18 May 2023).
- The Stanford 3D Scanning Repository. Available online: http://graphics.stanford.edu/data/3Dscanrep/ (accessed on 18 May 2023).
- Poly Haven HDRIs. Available online: https://polyhaven.com/hdris/indoor (accessed on 18 May 2023).
- Gigilashvili, D.; Trumpy, G. Appearance Manipulation in Spatial Augmented Reality using Image Differences. In Proceedings of the 11th Colour and Visual Computing Symposium, Gjøvik, Norway, 8–9 September 2022. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lighting Environment | Diffused | Diffused | Top | Top | Front | Front | Back | Back |
|---|---|---|---|---|---|---|---|---|
| Observation Area | Whole | Local | Whole | Local | Whole | Local | Whole | Local |
| dragon(Without Texture) | 0.6 | 1.4 | 1.6 | 0.3 | 0.8 | 1.9 | 2 | 1.6 |
| dragon(Texture1) | 0.5 | 1.6 | 2.4 | 1.6 | 2.1 | 2.1 | 0.4 | 1.3 |
| dragon(Texture2) | 0.7 | 0.7 | 1 | 0.6 | 1.2 | 0.7 | 1.5 | 1.3 |
| bunny(Without Texture) | 0.8 | 1.2 | 2 | 0.7 | 1.1 | 1.9 | 1.9 | 1.5 |
| bunny(Texture1) | 1.5 | 1.2 | 2.3 | 2 | 2 | 0.9 | 1.1 | 1.7 |
| bunny(Texture2) | 1.5 | 1.8 | 0.4 | 1.9 | 0.7 | 1.6 | 2 | 0.6 |
| buddha(Without Texture) | 1.6 | 1.6 | 0.6 | 1.6 | 0.7 | 1.4 | 2.1 | 0.4 |
| buddha(Texture1) | 0.6 | 2.3 | 1.4 | 0.6 | 0.5 | 1.8 | 2.5 | 1.6 |
| buddha(Texture2) | 0.4 | 1.8 | 2.5 | 1.8 | 2.7 | 2.3 | 0.7 | 2.1 |
| armadillo(Without Texture) | 1.2 | 1.5 | 0.9 | 1.4 | 0.9 | 1.3 | 1.3 | 0.6 |
| armadillo(Texture1) | 2.5 | 2.3 | 0.4 | 1.8 | 0.5 | 2.3 | 1.6 | 0.7 |
| armadillo(Texture2) | 1.1 | 2 | 2.6 | 1.4 | 2.3 | 2.3 | 0.3 | 1.7 |
| Whole | Local | |
|---|---|---|
| dragon | 1.23 | 1.26 |
| bunny | 1.44 | 1.42 |
| buddha | 1.36 | 1.61 |
| armadillo | 1.30 | 1.61 |
| Diffused | Top | Front | Back | |
|---|---|---|---|---|
| dragon | 0.92 | 1.25 | 1.47 | 1.35 |
| bunny | 1.33 | 1.55 | 1.37 | 1.47 |
| buddha | 1.38 | 1.42 | 1.57 | 1.57 |
| armadillo | 1.77 | 1.42 | 1.60 | 1.03 |
| Fixed View | Dynamic View | |
|---|---|---|
| dragon | 0.92 | 1.23 |
| bunny | 1.33 | 1.13 |
| buddha | 1.38 | 1.37 |
| armadillo | 1.77 | 1.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagasawa, K.; Ono, K.; Arai, W.; Tsumura, N. Perceptual Translucency in 3D Printing Using Surface Texture. J. Imaging 2023, 9, 105. https://doi.org/10.3390/jimaging9050105
Nagasawa K, Ono K, Arai W, Tsumura N. Perceptual Translucency in 3D Printing Using Surface Texture. Journal of Imaging. 2023; 9(5):105. https://doi.org/10.3390/jimaging9050105
Chicago/Turabian StyleNagasawa, Kazuki, Kamui Ono, Wataru Arai, and Norimichi Tsumura. 2023. "Perceptual Translucency in 3D Printing Using Surface Texture" Journal of Imaging 9, no. 5: 105. https://doi.org/10.3390/jimaging9050105