
Efficient Reallocation of BESS in Monopolar DC Networks for Annual Operating Costs Minimization: A Combinatorial-Convex Approach



Abstract
:1. Introduction
- The formulation of the problem concerning the optimal location reallocation of BESS in monopolar DC distribution networks as a mixed-integer convex recursive programming model by linearizing the power balance constraints via Taylor’s series expansion;
- A hybrid solution methodology which combines a metaheuristic optimization method that defines the buses where the batteries must be located–reallocated in the master stage, and a recursive convex programming model to define the optimal operation of the BESS in the slave stage.
2. Exact MINLP Modeling
2.1. Minimizing the Costs of Energy Losses
2.2. Minimization of Energy Purchasing and Operating Costs
2.3. Model Constraints
- The component of the branch-to-node incidence matrix is assigned as 1 if the distribution line j is connected to node k and the current is leaving this node;
- The component of the branch-to-node incidence matrix is assigned as if the distribution line j is connected to node k and the current is arriving at this node;
- The component of the branch-to-node incidence matrix is assigned as 0 if the distribution line j is not connected to node k.
3. Solution Methodology
3.1. Master Stage: Vortex Search Algorithm
3.1.1. Generating the Initial Solution
3.1.2. Generation of Candidate Solutions
3.1.3. Fitting of Candidate Solutions
3.1.4. Selection of the Hyper-Ellipse Center
3.1.5. Adaptive Reduction in the Hyper-Ellipse Radius
3.1.6. Stopping Criteria
- ✓
- When the maximum number of iterations is reached, the VSA stops, and the best solution corresponds to ;
- ✓
- If, during consecutive iterations, the center of the hyper-ellipse has not been improved, the VSA stops, and the best current solution is reported.
3.1.7. General Implementation of the VSA

3.2. Slave Stage: Recursive Hourly Optimal Power Flow Solution

4. Test Feeder Characteristics
- The BESS at bus 6 has an energy storage capability of 2 MWh, with a charging/discharging rate of 5 h (C-type BESS). The BESS at bus 14 can store 1.5 MWh with a charging/discharging rate of 4 h (B-type BESS). At node 31, there is a battery package with a capacity of 1 MWh with a charging/discharging rate of 4 h (A-type BESS);
- Regarding the PV generation units, it is assumed that each one was assigned to generate a maximum of 2.4 MWp, being located at nodes 12, 15, and 31. In addition, the expected generation curve for these units is presented in Table 3.
5. Computational Validation
5.1. Optimal Reallocation of BESS to Minimize min
- The solution provided by the BONMIM solver (i.e., the MINLP solution of GAMS) allowed for a reduction of about with respect to the benchmark case, which corresponds to a gain of about USD/year (net profit regarding energy loss costs). To reach this solution, all the three BESS available were reallocated as follows: the C-type BESS at node 6 was transferred to node 15, the B-type BESS at node 14 was moved to node 31, and the A-type BESS at node 31 (A-type) was reallocated to node 18;
- The proposed VSA-Convex solution method found an energy loss cost reduction of about regarding the benchmark case, i.e., a reduction of about USD/year in the annual costs of the energy losses. This solution reallocated all the BESS as follows: the C-type BESS at node 6 was transferred to node 13, the B-type BESS at node 14 was moved to node 31, and the A-type BESS at node 31 was reallocated to node 13. Note that the VSA-Convex method allowed for an additional gain of about USD/year 532.8047 when compared to the BONMIN solution, which demonstrates that the VSA-Convex finds a better solution via the proposed master–slave optimization approach than that of the exact MINLP model of the GAMS software;
- The solutions in Table 4 exhibit the following features. (a) Node 31 is the only bus that is maintained in all three options as an excellent candidate to connect a BESS. This is because a PV generation system is connected at this node, and its surplus of power can be directly stored at this generation point. (b) the BONMIN and VSA-Convex methodologies share 66.67% of the solution with the exact location and type of BESS at nodes 15 and 31.
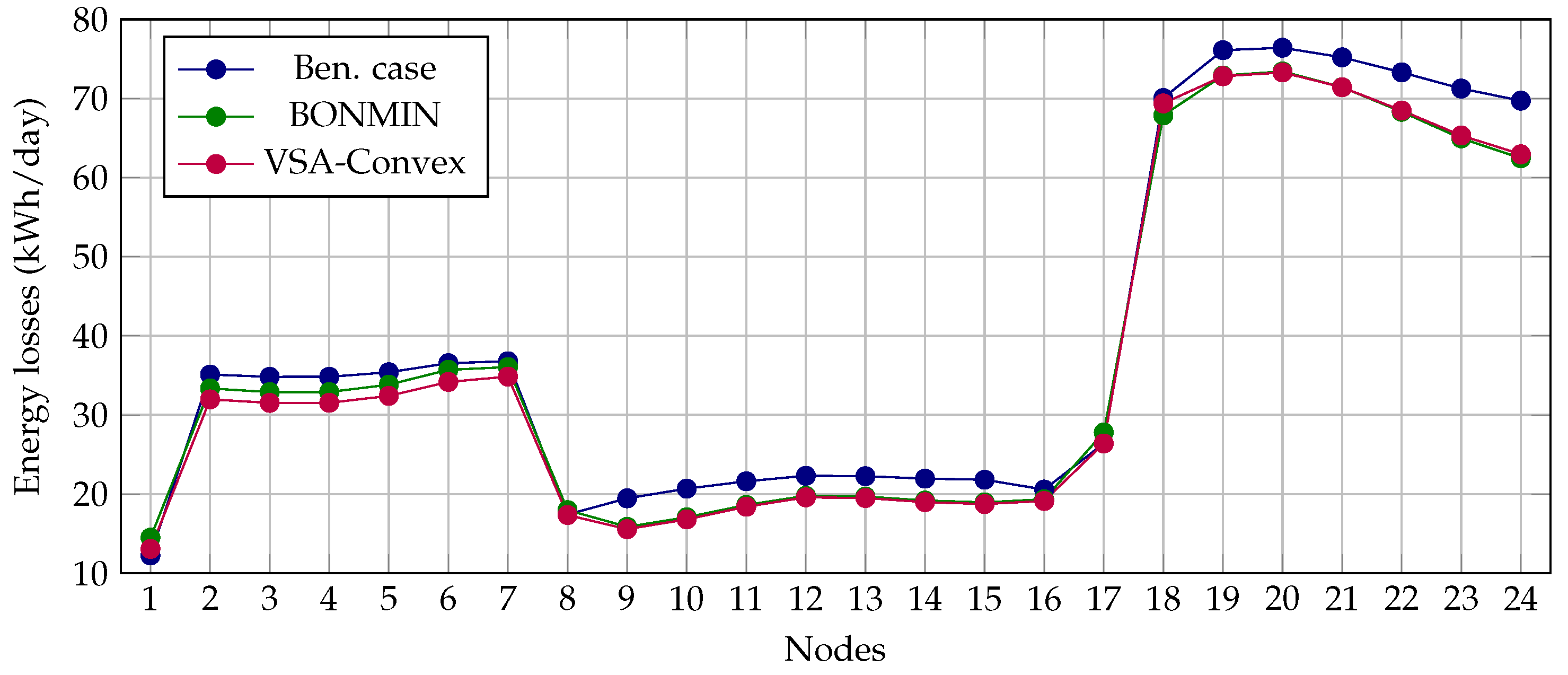
- The energy loss curve for the benchmark case is the higher curve (due to the initial location of the BESS). The current flow for some specific distribution lines is higher than the solutions obtained with the BOMIN and VSA-Convex approaches, which implies that the energy losses increase quadratically with them. Note that the daily energy losses in the benchmark case are kWh/day; in the case of the exact MINLP solution, the total energy losses were kWh/day; and, for the proposed VSA-Convex approach, these were kWh/day;
- By comparing the BONMIN and VSA-Convex curves, it can be observed that both solutions follow a similar behavior. However, the main difference is in favor of the proposed approach during periods 1 to 7, where the BONMIN curve is higher;
- As expected, when the renewable energy generation increases considerably (periods 7 to 17), the total energy losses per hour decrease, which can be attributed to the fact that dispersed generation allows for the reduction in current flows in some distribution lines near the generators, directly impacting the reduction in the grid power losses.
5.2. Optimal Reallocation of BESS to Minimize
- The GAMS solution of the exact MINLP model with the BONMIN solver found an objective function value of USD/year , which implies a reduction of USD/year with respect to the benchmark case by reallocating all the batteries as follows: the C-type BESS at node 6 was transferred to node 31, the B-type BESS at node 14 was moved to node 18, and the A-type BESS in node 31 was reallocated to node 15;
- The proposed VSA-vortex approach reallocated batteries as follows: the C-type BESS at node 6 was transferred to node 15; the B-type BESS at node 14 was moved to node 31, and the A-type BESS at node 31 was reallocated to node 14. These movements allowed for a reduction of about with respect to the benchmark case, i.e., USD/year . Note that, regarding the comparison between the BONMIN solution and the VSA-Convex approach, an additional gain of about dollars per year of operation is obtained if the latter is implemented;
- As with minimization, when the annual energy purchasing and maintenance costs of the PV systems are minimized, in all the solutions, node 31 continues to be part of the set of nodes where BESS must be placed. This is also explained by the fact that there is a PV source at this node, and it is necessary to store the energy surplus during the solar hours in order to inject it when the renewable input is zero and the demand increases.
- The benchmark case (i.e., the initial location of the BESS) does not allow efficiently taking advantage of the available renewable energy, given that, when compared to the BONMIN and VSA-Convex solutions, in the period where renewable generation is significant (between hours 7 and 17), there is more generation at the substation bus, which implies that, due to the technical constraint regarding current flows in the distribution branches, less energy can be stored in contrast with that involved in BESS reallocation;
- The final objective function value is directly related to the amount of energy generated at the substation bus, which corresponds to the area of the generation curve in Figure 3. Note that the energy generation in the benchmark case was MWh/day, whereas the BONMIN solver reports a daily energy generation of MWh, and the VSA-Convex method generates MWh/day.
6. Conclusions and Future Works
- The proposed master–slave optimization approach (i.e., the VSA-Convex approach) achieved reductions of about USD/year when the objective function was the minimization of the annual energy loss costs. In contrast, the solution of the MINLP model with the BONMIN solver of the GAMS programming environment reached a reduction of about USD/year . These results imply that the proposed VSA-Convex approach allows finding additional improvements of about USD per year of operation by redistributing the nodal location of the BESS with high efficiency when compared to the BONMIN solution;
- The minimization of the energy purchasing and maintenance costs confirms that the VSA-Convex approach finds better numerical solutions in comparison with the exact MINLP solution obtained via commercial tools. In this sense, the VSA-Convex approach outperforms the benchmark case by about , i.e., USD/year . In contrast, the BONMIN solver finds an improvement of about (USD/year ). These results show that, with the proposed master–slave optimization method, the solution of the BONMIN solver was surpassed by more than twice its value, i.e., an additional gain of USD/year ;
- All of the numerical results show that, with the proposed distribution of the PV generation plants, bus 31 of the IEEE 33-bus system is an efficient node to locate BESS. It was observed that, for the BONMIN and the proposed VSA-Convex approaches regarding both objective functions, node 31 was part of the optimal solution, increasing the energy storage capabilities from type A to types B and C. This change in the size of the BESS at this node can be attributed to the fact that this node contains a PV generation system, and, with a BESS on this node, better energy storage properties are provided to the monopolar DC network without causing further energy loss costs due to energy transportation between different nodes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peñaranda, A.F.; Romero-Quete, D.; Cortés, C.A. Grid-Scale Battery Energy Storage for Arbitrage Purposes: A Colombian Case. Batteries 2021, 7, 59. [Google Scholar] [CrossRef]
- Zhang, D.; Shafiullah, G.; Das, C.K.; Wong, K.W. A systematic review of optimal planning and deployment of distributed generation and energy storage systems in power networks. J. Energy Storage 2022, 56, 105937. [Google Scholar] [CrossRef]
- Chen, T.; Jin, Y.; Lv, H.; Yang, A.; Liu, M.; Chen, B.; Xie, Y.; Chen, Q. Applications of Lithium-Ion Batteries in Grid-Scale Energy Storage Systems. Trans. Tianjin Univ. 2020, 26, 208–217. [Google Scholar] [CrossRef] [Green Version]
- Korjani, S.; Casu, F.; Damiano, A.; Pilloni, V.; Serpi, A. An online energy management tool for sizing integrated PV-BESS systems for residential prosumers. Appl. Energy 2022, 313, 118765. [Google Scholar] [CrossRef]
- Shamarova, N.; Suslov, K.; Ilyushin, P.; Shushpanov, I. Review of Battery Energy Storage Systems Modeling in Microgrids with Renewables Considering Battery Degradation. Energies 2022, 15, 6967. [Google Scholar] [CrossRef]
- Bierman, J.; Bekker, B. Review of Control Strategies for Lithium-ion Battery Energy Storage Systems in Distribution Networks. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Garip, S.; Ozdemir, S. Optimization of PV and Battery Energy Storage Size in Grid-Connected Microgrid. Appl. Sci. 2022, 12, 8247. [Google Scholar] [CrossRef]
- Alzahrani, A.; Alharthi, H.; Khalid, M. Minimization of Power Losses through Optimal Battery Placement in a Distributed Network with High Penetration of Photovoltaics. Energies 2019, 13, 140. [Google Scholar] [CrossRef] [Green Version]
- Beuse, M.; Steffen, B.; Dirksmeier, M.; Schmidt, T.S. Comparing CO2 emissions impacts of electricity storage across applications and energy systems. Joule 2021, 5, 1501–1520. [Google Scholar] [CrossRef]
- Arbabzadeh, M.; Sioshansi, R.; Johnson, J.X.; Keoleian, G.A. The role of energy storage in deep decarbonization of electricity production. Nat. Commun. 2019, 10, 3413. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valencia, A.; Hincapie, R.A.; Gallego, R.A. Optimal location, selection, and operation of battery energy storage systems and renewable distributed generation in medium–low voltage distribution networks. J. Energy Storage 2021, 34, 102158. [Google Scholar] [CrossRef]
- Secchi, M.; Barchi, G.; Macii, D.; Moser, D.; Petri, D. Multi-objective battery sizing optimisation for renewable energy communities with distribution-level constraints: A prosumer-driven perspective. Appl. Energy 2021, 297, 117171. [Google Scholar] [CrossRef]
- dos Santos, C.; Cavalheiro, E.; Bartmeyer, P.; Lyra, C. A MINLP Model to Optimize Battery Placement and Operation in Smart Grids. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Yang, N.C.; Zhang, Y.C.; Adinda, E.W. Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration. Mathematics 2022, 10, 3420. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C. An Efficient EMS for BESS in Monopolar DC Networks with High Penetration of Renewable Generation: A Convex Approximation. Batteries 2023, 9, 84. [Google Scholar] [CrossRef]
- Basto-Gil, J.D.; Maldonado-Cardenas, A.D.; Montoya, O.D. Optimal Selection and Integration of Batteries and Renewable Generators in DC Distribution Systems through a Mixed-Integer Convex Formulation. Electronics 2022, 11, 3139. [Google Scholar] [CrossRef]
- Di-Piazza, M.C. Recent Developments and Trends in Energy Management Systems for Microgrids. Energies 2022, 15, 8226. [Google Scholar] [CrossRef]
- Duman, A.C.; Erden, H.S.; Gönül, Ö.; Gönül, Ö. Optimal sizing of PV-BESS units for home energy management system-equipped households considering day-ahead load scheduling for demand response and self-consumption. Energy Build. 2022, 267, 112164. [Google Scholar] [CrossRef]
- Macedo, L.H.; Franco, J.F.; Rider, M.J.; Romero, R. Optimal Operation of Distribution Networks Considering Energy Storage Devices. IEEE Trans. Smart Grid 2015, 6, 2825–2836. [Google Scholar] [CrossRef] [Green Version]
- Sedghi, M.; Ahmadian, A.; Aliakbar-Golkar, M. Optimal Storage Planning in Active Distribution Network Considering Uncertainty of Wind Power Distributed Generation. IEEE Trans. Power Syst. 2016, 31, 304–316. [Google Scholar] [CrossRef]
- Sarker, M.R.; Murbach, M.D.; Schwartz, D.T.; Ortega-Vazquez, M.A. Optimal operation of a battery energy storage system: Trade-off between grid economics and storage health. Electr. Power Syst. Res. 2017, 152, 342–349. [Google Scholar] [CrossRef]
- Soroudi, A. Power System Optimization Modeling in GAMS; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Liu, K.; Chen, Q.; Kang, C.; Su, W.; Zhong, G. Optimal operation strategy for distributed battery aggregator providing energy and ancillary services. J. Mod. Power Syst. Clean Energy 2018, 6, 722–732. [Google Scholar] [CrossRef] [Green Version]
- Berglund, F.; Zaferanlouei, S.; Korpås, M.; Uhlen, K. Optimal Operation of Battery Storage for a Subscribed Capacity-Based Power Tariff Prosumer—A Norwegian Case Study. Energies 2019, 12, 4450. [Google Scholar] [CrossRef] [Green Version]
- Home-Ortiz, J.M.; Pourakbari-Kasmaei, M.; Lehtonen, M.; Mantovani, J.R.S. Optimal location-allocation of storage devices and renewable-based DG in distribution systems. Electr. Power Syst. Res. 2019, 172, 11–21. [Google Scholar] [CrossRef]
- Zaher, G.; Shaaban, M.; Mokhtar, M.; Zeineldin, H. Optimal operation of battery exchange stations for electric vehicles. Electr. Power Syst. Res. 2021, 192, 106935. [Google Scholar] [CrossRef]
- Kordonis, I.; Charalampidis, A.C.; Haessig, P. Optimal operation of a grid-connected battery energy storage system over its lifetime. Optim. Control. Appl. Methods 2021, 44, 739–757. [Google Scholar] [CrossRef]
- An, C.; Chen, J. Analysis of the Development of DC Distribution Network with Renewable Energy and Flexible Energy Storage. J. Phys. Conf. Ser. 2018, 1087, 042015. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 9 November 2022).
- Grant, M.; Boyd, S. Graph implementations for nonsmooth convex programs. In Recent Advances in Learning and Control; Blondel, V., Boyd, S., Kimura, H., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2008; pp. 95–110. [Google Scholar]
- Farivar, M.; Low, S.H. Branch Flow Model: Relaxations and Convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Rivas-Trujillo, E. Optimal Location-Reallocation of Battery Energy Storage Systems in DC Microgrids. Energies 2020, 13, 2289. [Google Scholar] [CrossRef]
- Doğan, B.; Ölmez, T. A new metaheuristic for numerical function optimization: Vortex Search algorithm. Inf. Sci. 2015, 293, 125–145. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S.; Maleki, I.; Dizaji, Z.A. Chaotic vortex search algorithm: Metaheuristic algorithm for feature selection. Evol. Intell. 2021, 15, 1777–1808. [Google Scholar] [CrossRef]
- Granada-Echeverri, M.; Gallego-Rendón, R.A.; López-Lezama, J.M. Optimal Phase Balancing Planning for Loss Reduction in Distribution Systems using a Specialized Genetic Algorithm. Ing. Y Cienc. 2012, 8, 121–140. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Zhao, Y. A quantum-inspired vortex search algorithm with application to function optimization. Nat. Comput. 2018, 18, 647–674. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-Gonzalez, W.; Grisales-Norena, L.F. Vortex Search Algorithm for Optimal Power Flow Analysis in DC Resistive Networks With CPLs. IEEE Trans. Circuits Syst. II 2020, 67, 1439–1443. [Google Scholar] [CrossRef]
- Qyyum, M.A.; Yasin, M.; Nawaz, A.; He, T.; Ali, W.; Haider, J.; Qadeer, K.; Nizami, A.S.; Moustakas, K.; Lee, M. Single-Solution-Based Vortex Search Strategy for Optimal Design of Offshore and Onshore Natural Gas Liquefaction Processes. Energies 2020, 13, 1732. [Google Scholar] [CrossRef] [Green Version]
- Garces, A. A Linear Three-Phase Load Flow for Power Distribution Systems. IEEE Trans. Power Syst. 2016, 31, 827–828. [Google Scholar] [CrossRef]
- Javadi, M.S.; Gouveia, C.S.; Carvalho, L.M.; Silva, R. Optimal Power Flow Solution for Distribution Networks using Quadratically Constrained Programming and McCormick Relaxation Technique. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Lucia, A. Successive Quadratic Programming. In Encyclopedia of Optimization; Springer: Berlin/Heidelberg, Germany, 2001; pp. 2561–2567. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Solution Methodology | Objective Function | Grid | Year | Ref. |
|---|---|---|---|---|
| Mixed-integer linear and conic programming | Energy purchasing costs minimization | AC | 2015 | [19] |
| Hybrid tabu search and particle swarm optimizers | Investment and operating costs | AC | 2016 | [20] |
| Mixed-integer linear programming | Maximization of energy market profits and battery degradation rates minimization | AC | 2017 | [21] |
| Mixed-integer nonlinear programming | Energy generation costs minimization | AC | 2017 | [22] |
| Nonlinear programming | Power system regulation and peak-load shaving services | AC | 2018 | [23] |
| Mixed-integer linear programming | Cost of energy minimization and peak power demand reduction | AC | 2019 | [24] |
| Mixed-integer conic programming | Investment and operating costs | AC | 2019 | [25] |
| Mixed-integer programming | Operating costs minimization in electric vehicle charging substations | AC | 2021 | [26] |
| Simulated annealing and convex programming | Investment and operating costs | AC | 2021 | [11] |
| Mixed-integer linear programming | Net present value minimization | AC | 2021 | [1] |
| Stochastic programming | Energy costs minimization and battery use maximization | AC | 2021 | [27] |
| Mixed-integer quadratic convex modeling | Energy loss costs minimization | DC | 2022 | [16] |
| Recursive convex programming | Energy loss minimization | DC | 2023 | [15] |
| Branch | Node i | Node j | R () | Pj (kW) | Imax (A) |
|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.0922 | 100 | 320 |
| 2 | 2 | 3 | 0.4930 | 90 | 280 |
| 3 | 3 | 4 | 0.3660 | 120 | 195 |
| 4 | 4 | 5 | 0.3811 | 60 | 195 |
| 5 | 5 | 6 | 0.8190 | 60 | 195 |
| 6 | 6 | 7 | 0.1872 | 200 | 95 |
| 7 | 7 | 8 | 17114 | 200 | 85 |
| 8 | 8 | 9 | 10300 | 60 | 70 |
| 9 | 9 | 10 | 10400 | 60 | 55 |
| 10 | 10 | 11 | 0.1966 | 45 | 55 |
| 11 | 11 | 12 | 0.3744 | 60 | 55 |
| 12 | 12 | 13 | 14.680 | 60 | 40 |
| 13 | 13 | 14 | 0.5416 | 120 | 40 |
| 14 | 14 | 15 | 0.5910 | 60 | 25 |
| 15 | 15 | 16 | 0.7463 | 60 | 20 |
| 16 | 16 | 17 | 12890 | 60 | 20 |
| 17 | 17 | 18 | 0.7320 | 90 | 20 |
| 18 | 2 | 19 | 0.1640 | 90 | 30 |
| 19 | 19 | 20 | 15042 | 90 | 25 |
| 20 | 20 | 21 | 0.4095 | 90 | 20 |
| 21 | 21 | 22 | 0.7089 | 90 | 20 |
| 22 | 3 | 23 | 0.4512 | 90 | 85 |
| 23 | 23 | 24 | 0.8980 | 420 | 70 |
| 24 | 24 | 25 | 0.8900 | 420 | 40 |
| 25 | 6 | 26 | 0.2030 | 60 | 85 |
| 26 | 26 | 27 | 0.2842 | 60 | 85 |
| 27 | 27 | 28 | 10590 | 60 | 70 |
| 28 | 28 | 29 | 0.8042 | 120 | 70 |
| 29 | 29 | 30 | 0.5075 | 200 | 55 |
| 30 | 30 | 31 | 0.9744 | 150 | 40 |
| 31 | 31 | 32 | 0.3105 | 210 | 25 |
| 32 | 32 | 33 | 0.3410 | 60 | 20 |
| Hour | (%) | (%) | Hour | (%) | (%) |
|---|---|---|---|---|---|
| 1 | 0 | 65.5092 | 13 | 61.8091 | 94.3876 |
| 2 | 0 | 63.0152 | 14 | 55.7162 | 93.1269 |
| 3 | 0 | 61.5570 | 15 | 45.2364 | 92.5406 |
| 4 | 0 | 61.5830 | 16 | 32.0524 | 92.2598 |
| 5 | 0 | 64.4567 | 17 | 17.6932 | 90.8070 |
| 6 | 0 | 69.8937 | 18 | 5.0658 | 88.8587 |
| 7 | 4.5411 | 73.4230 | 19 | 0.0499 | 94.6218 |
| 8 | 18.4242 | 79.3483 | 20 | 0 | 95.6175 |
| 9 | 34.0999 | 84.3313 | 21 | 0 | 91.5546 |
| 10 | 48.1610 | 87.6224 | 22 | 0 | 84.7794 |
| 11 | 57.3749 | 91.7021 | 23 | 0 | 76.8311 |
| 12 | 62.5715 | 94.5951 | 24 | 0 | 70.2960 |
| Scenario | (USD/Year) | BESS | Reduction (%) |
|---|---|---|---|
| Benchmark case | 45,246.3020 | 6 (C), 14 (B), 31 (A) | — |
| BONMIN | 42,517.2110 | 15 (C), 18 (A), 31 (B) | 6.0316 |
| VSA-Convex | 41,984.4063 | 13 (A), 15 (C), 31 (B) | 7.2091 |
| Scenario | (USD/Year) | BESS | Reduction (%) |
|---|---|---|---|
| Benchmark case | 2,450,204.72 | 6 (C), 14 (B), 31 (A) | — |
| BONMIN | 2,411,648.34 | 15 (A), 18 (B), 31 (C) | 1.5736 |
| VSA-Convex | 2,371,542.06 | 14 (A), 15 (C), 31 (B) | 3.2105 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C. Efficient Reallocation of BESS in Monopolar DC Networks for Annual Operating Costs Minimization: A Combinatorial-Convex Approach. Batteries 2023, 9, 190. https://doi.org/10.3390/batteries9030190
Grisales-Noreña LF, Montoya OD, Hernández JC. Efficient Reallocation of BESS in Monopolar DC Networks for Annual Operating Costs Minimization: A Combinatorial-Convex Approach. Batteries. 2023; 9(3):190. https://doi.org/10.3390/batteries9030190
Chicago/Turabian StyleGrisales-Noreña, Luis Fernando, Oscar Danilo Montoya, and Jesús C. Hernández. 2023. "Efficient Reallocation of BESS in Monopolar DC Networks for Annual Operating Costs Minimization: A Combinatorial-Convex Approach" Batteries 9, no. 3: 190. https://doi.org/10.3390/batteries9030190