

Stream and Potential Functions for Transient Flow Simulations in Porous Media with Pressure-Controlled Well Systems

Abstract
:1. Introduction
2. Methodology
2.1. Basic Assumptions
- The porous medium hosting the reservoir is considered homogeneous and possesses either isotropic or anisotropic diffusivity.
- The fluid flow in the reservoir is solely due to pressure gradients caused by engineering interventions (such as the drilling of injection and production wells), where a lowered bottomhole pressure is maintained by the production system at the reservoir inflow level.
- The fluid in the reservoir is assumed to be single-phase, incompressible (variations in density are negligible), isotropic (the properties are not dependent on the direction along which they are measured), and of Newtonian viscosity (the viscosity does not change when we apply a stress and its magnitude is insensitive to pressure changes).
2.2. The Fluid Motion Model in a Porous Medium
- is the fluid velocity, where ( in two dimensions is the spatial coordinate and t is the time variable.
- is the fluid density, and is the fluid viscosity, and they are assumed constants as stated in Section 2.1.
- is a scalar function representing the pressure of the fluid in every spatial location (x, y), and at any time t; is gravity’s acceleration, which is needed when the gravity forces are included in the analysis, such as in buoyancy-driven flows due to thermal gradients.
- The gradient operator in 2D is , and the Laplace operator is .
- The term is called the convection term, and the term is the diffusion term. Therefore, Equation (1a) belongs to the class of convection–diffusion equations.
- Equation (1b) is the mass conservation equation, also called the continuity equation in the case of incompressible flow (i.e., with a constant density ). Note that in practice, the equation of motion for incompressible fluids is still found to be applicable to slightly compressible fluids (such as oil and gas-saturated oils).
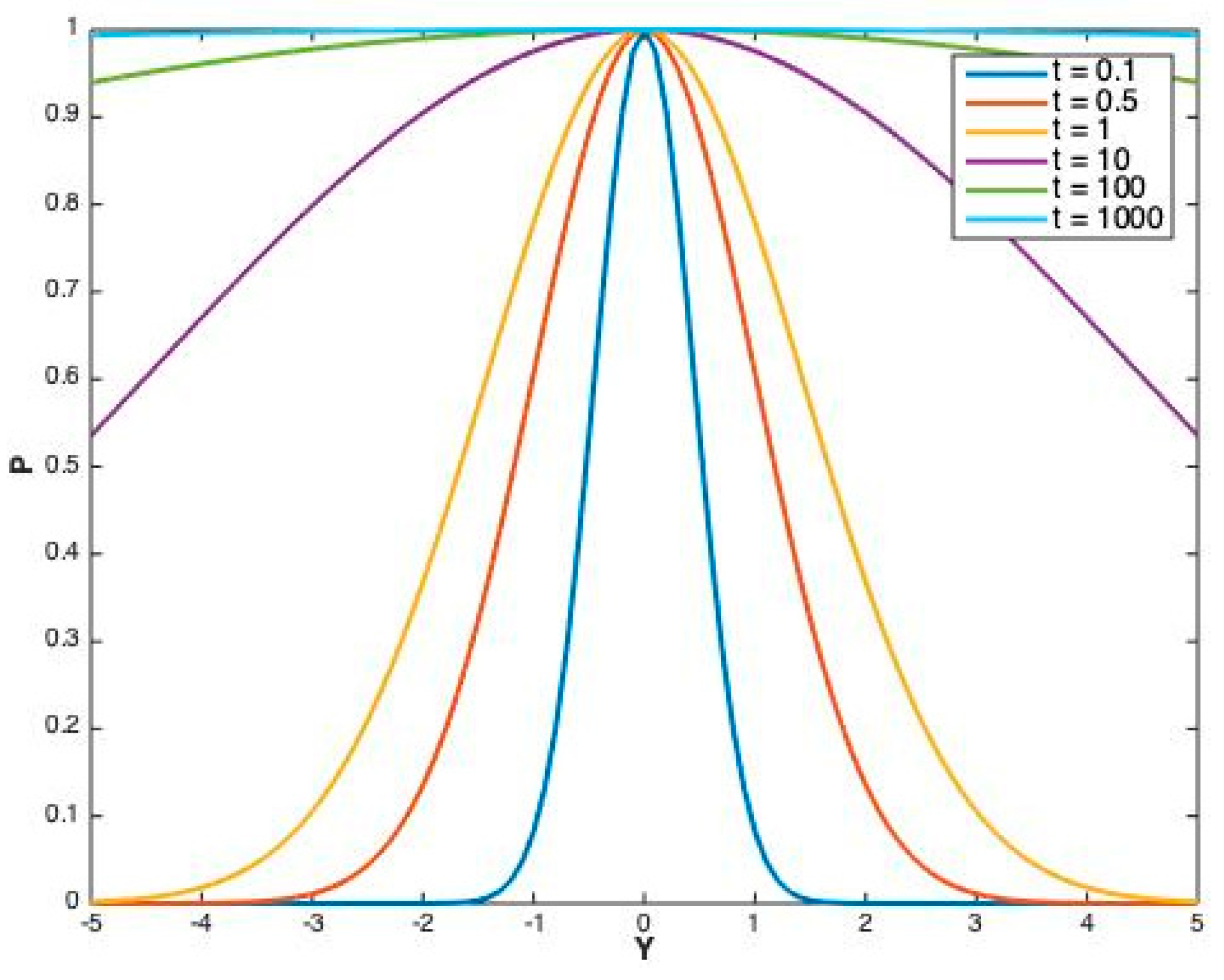
2.3. Gaussian Pressure Transient Solution
- Case A: Isotropic diffusivity
- For use ;
- For use ;
- For use .
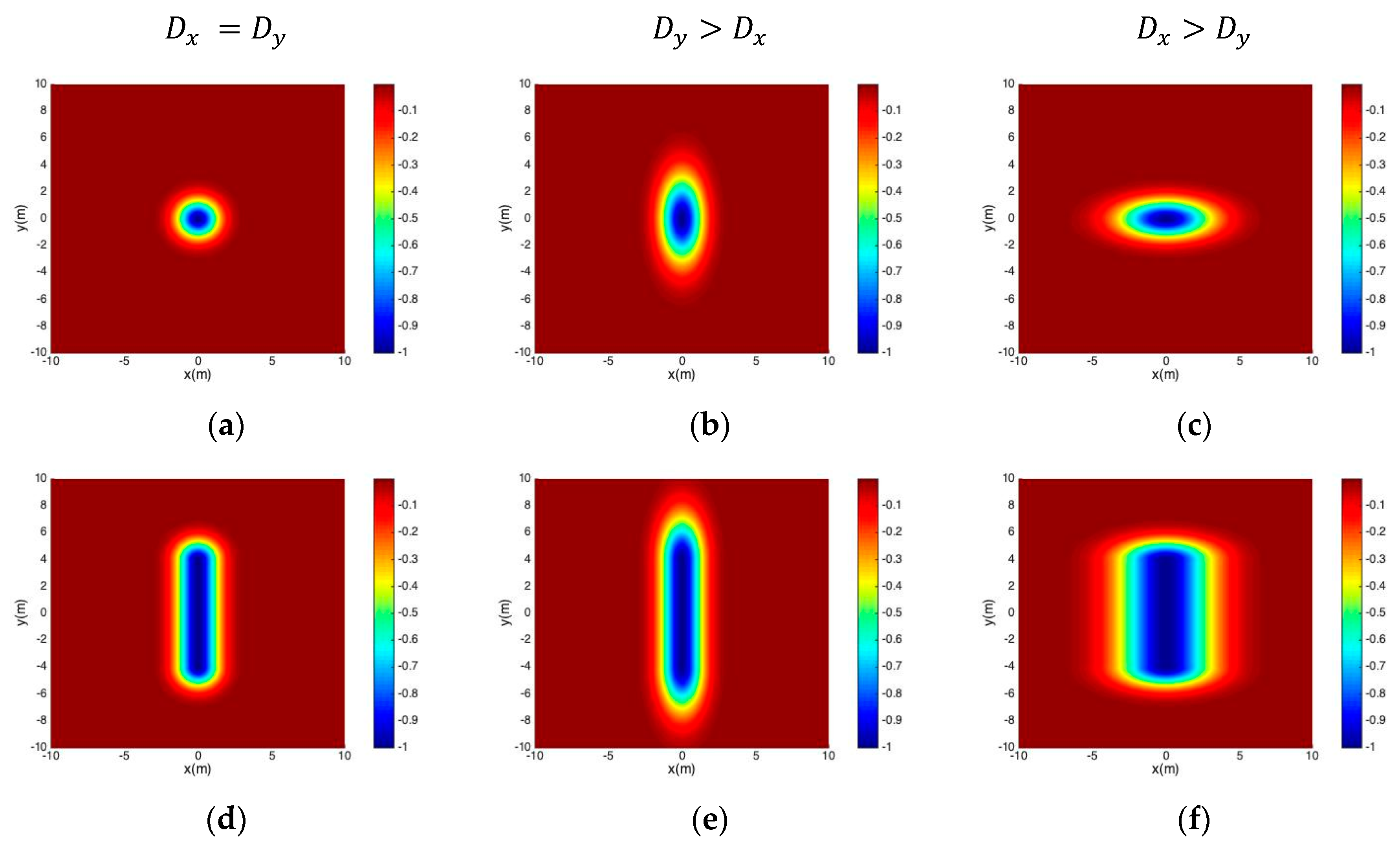
- Case B: Anisotropic diffusivity
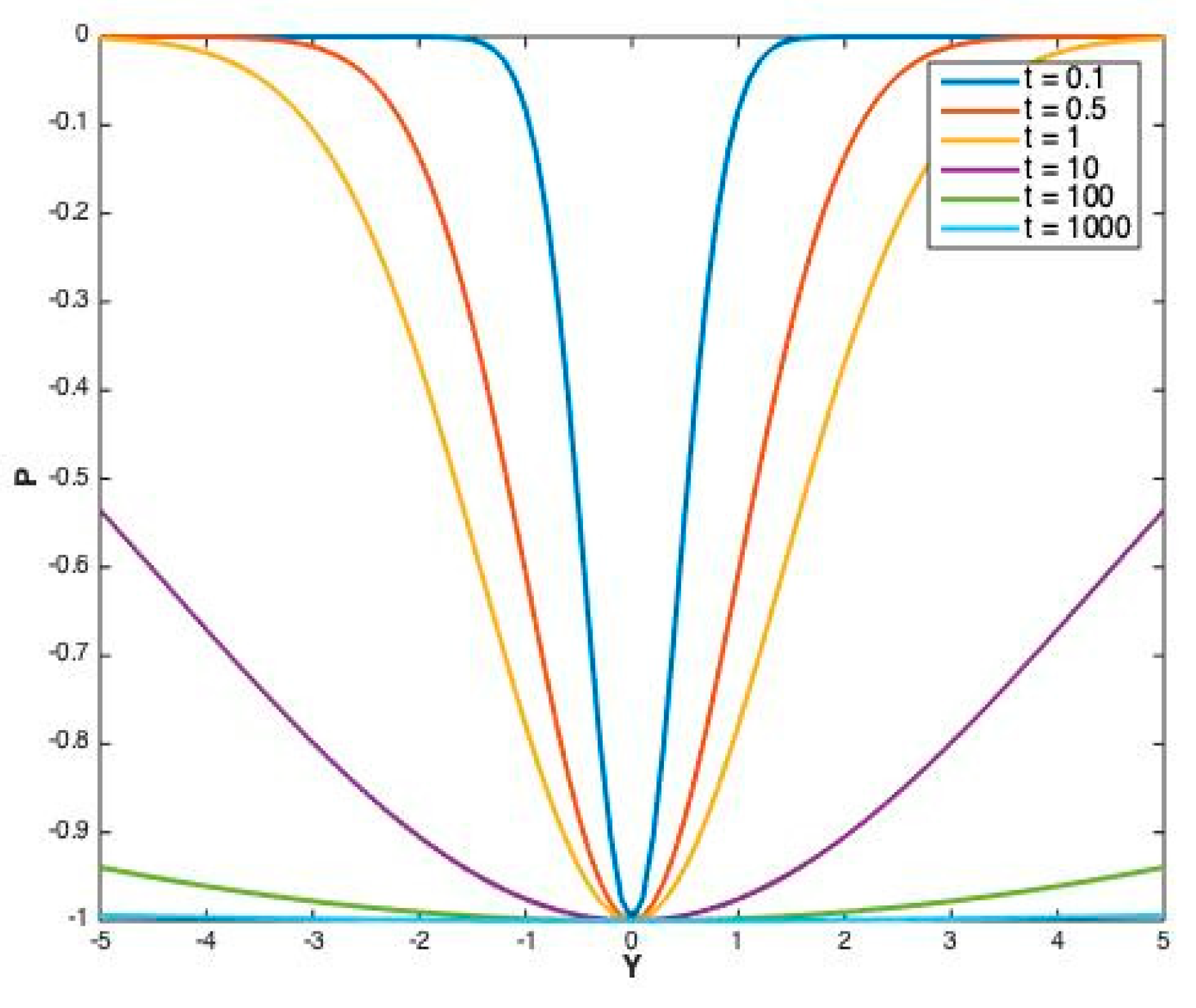
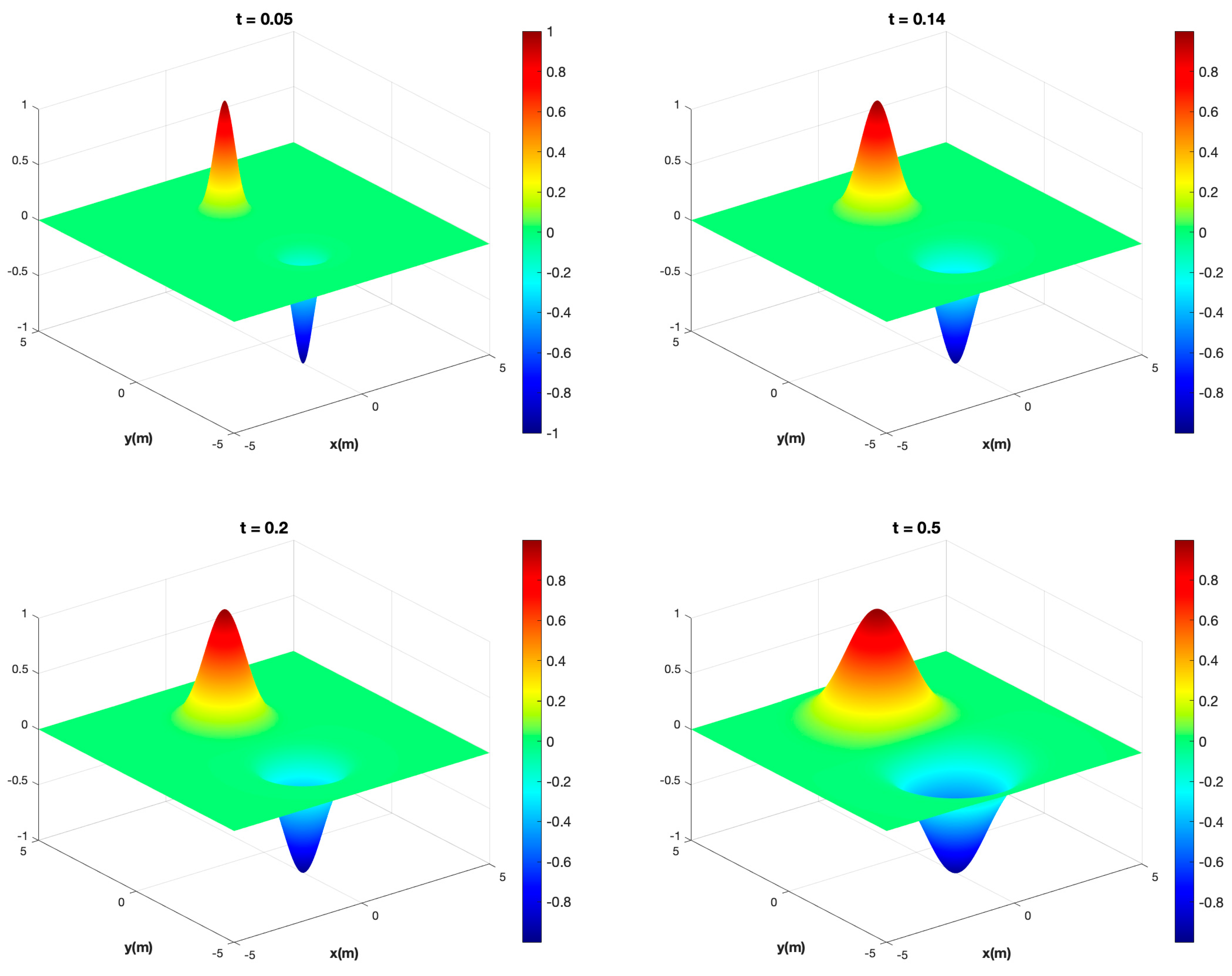
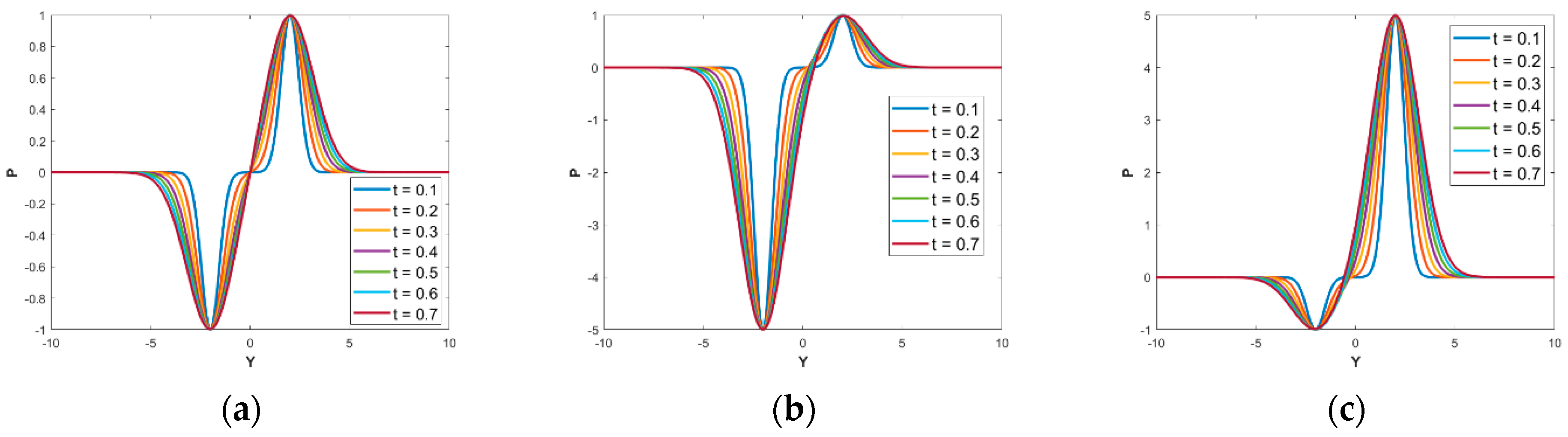
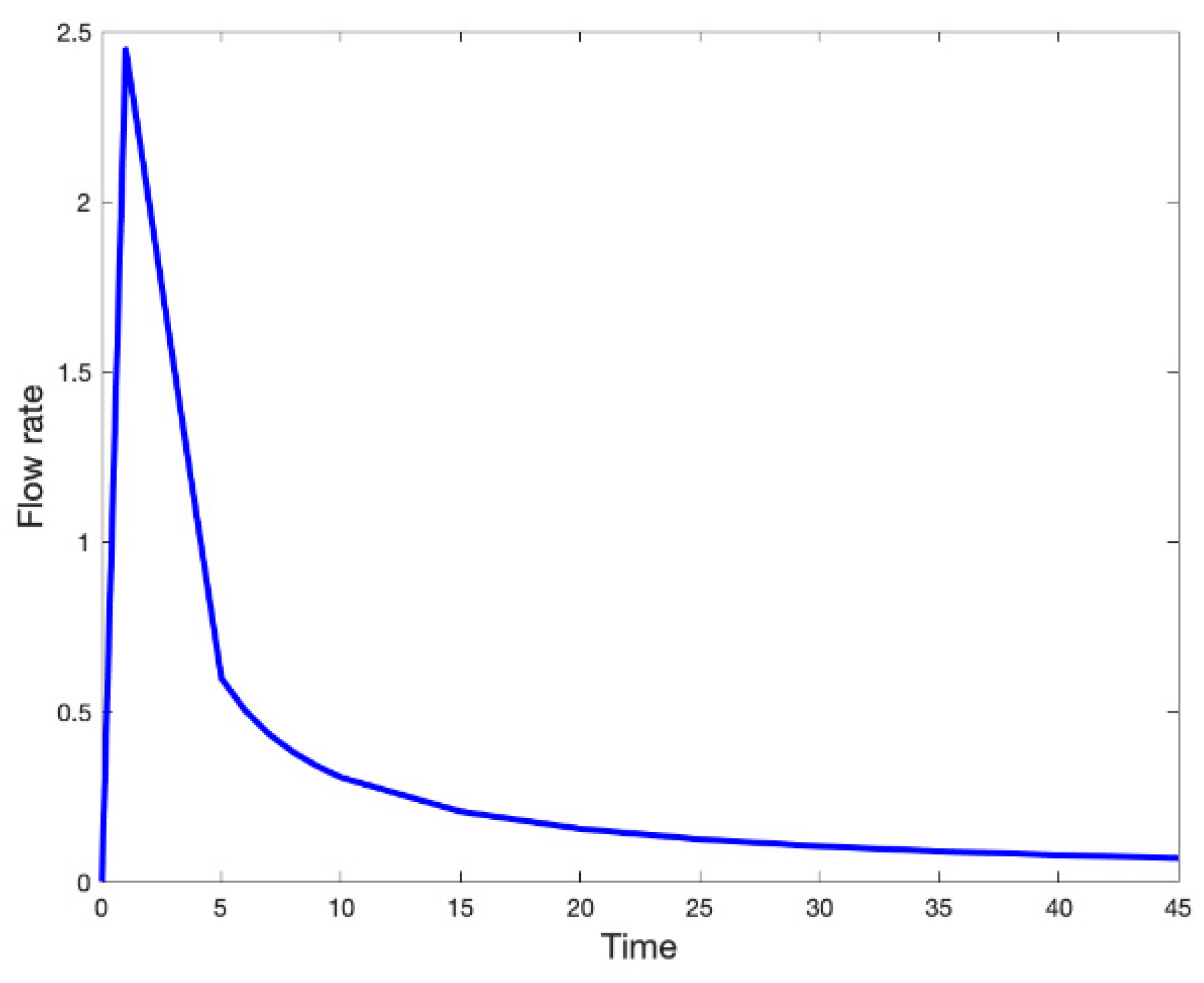
2.4. Evolution of Pressure Transients
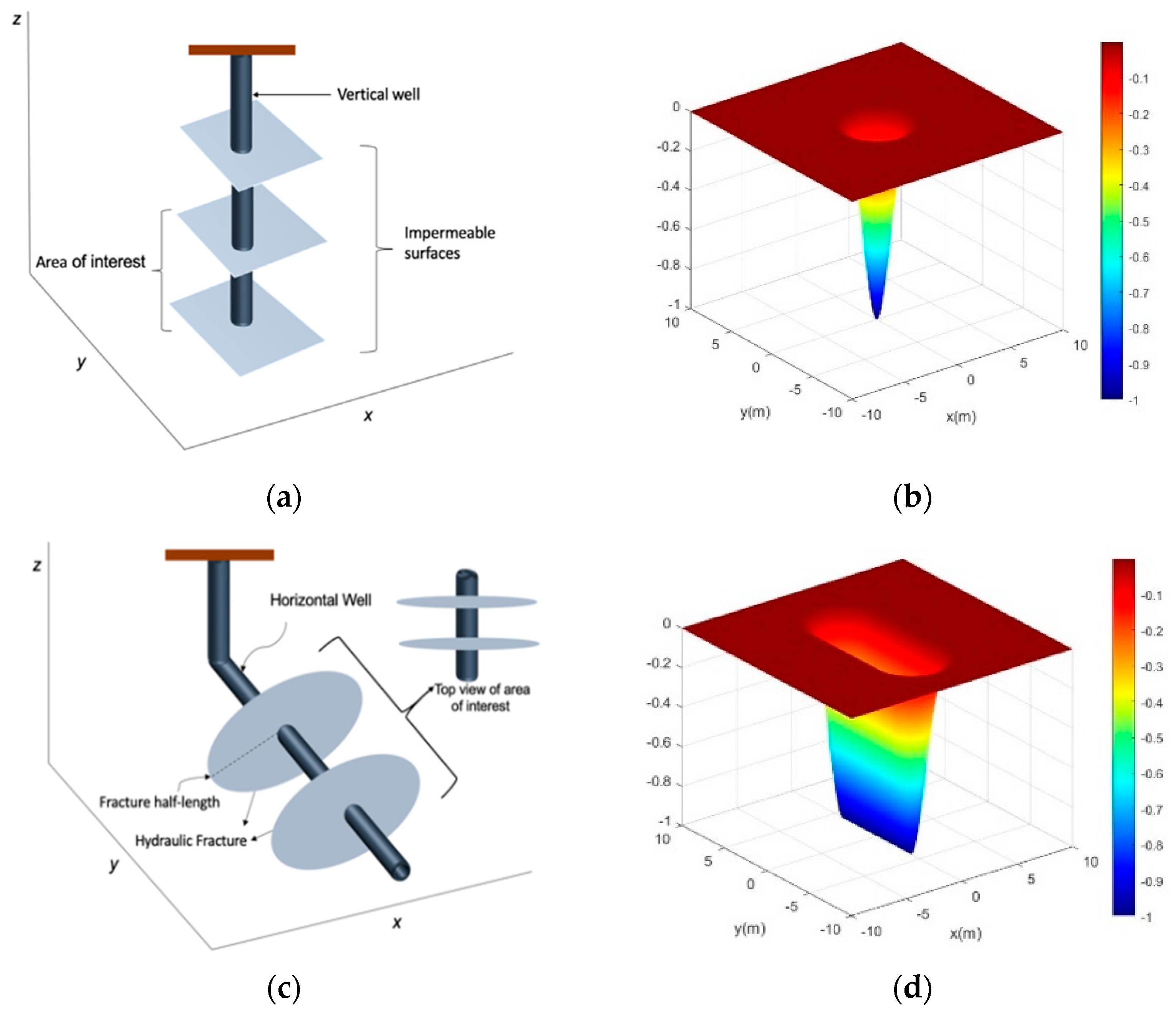
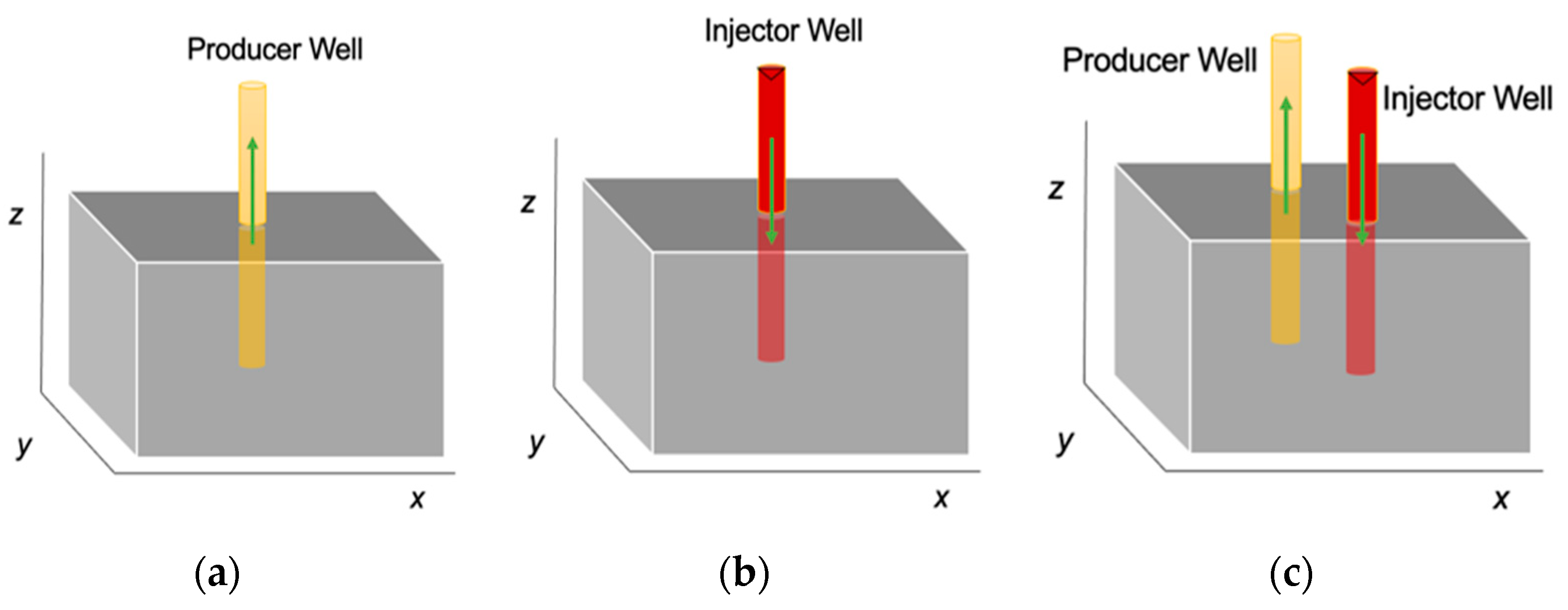
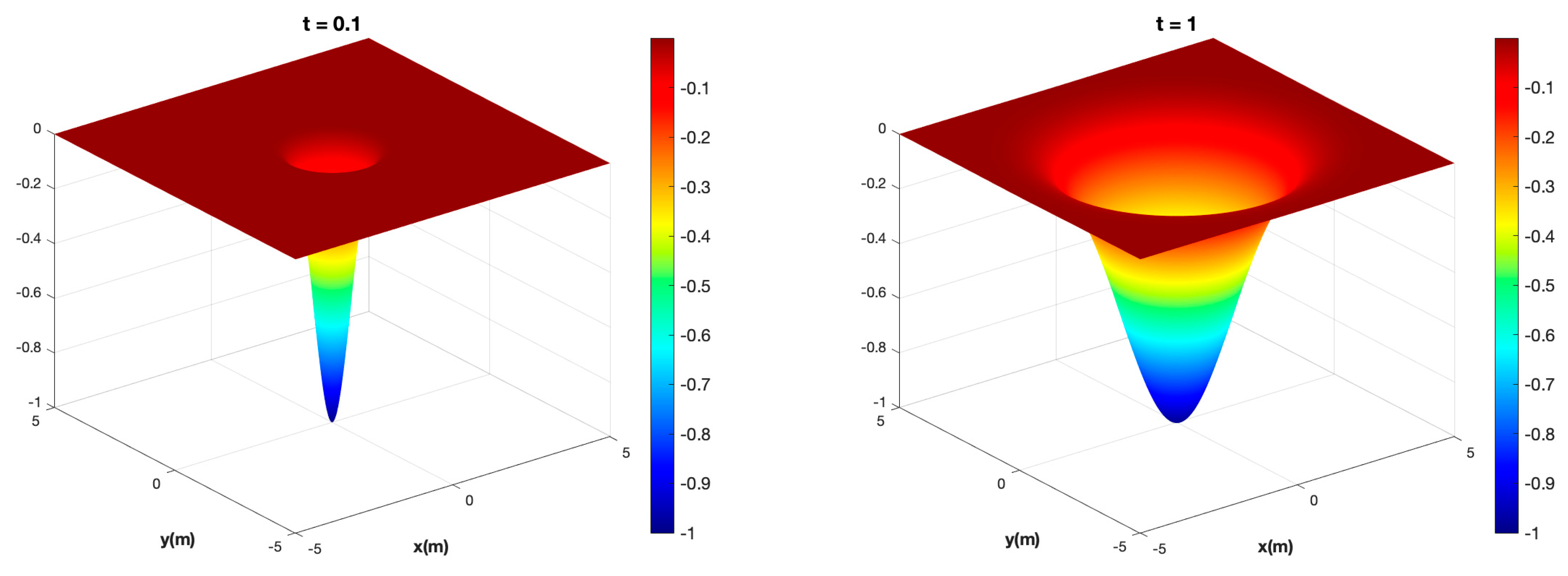
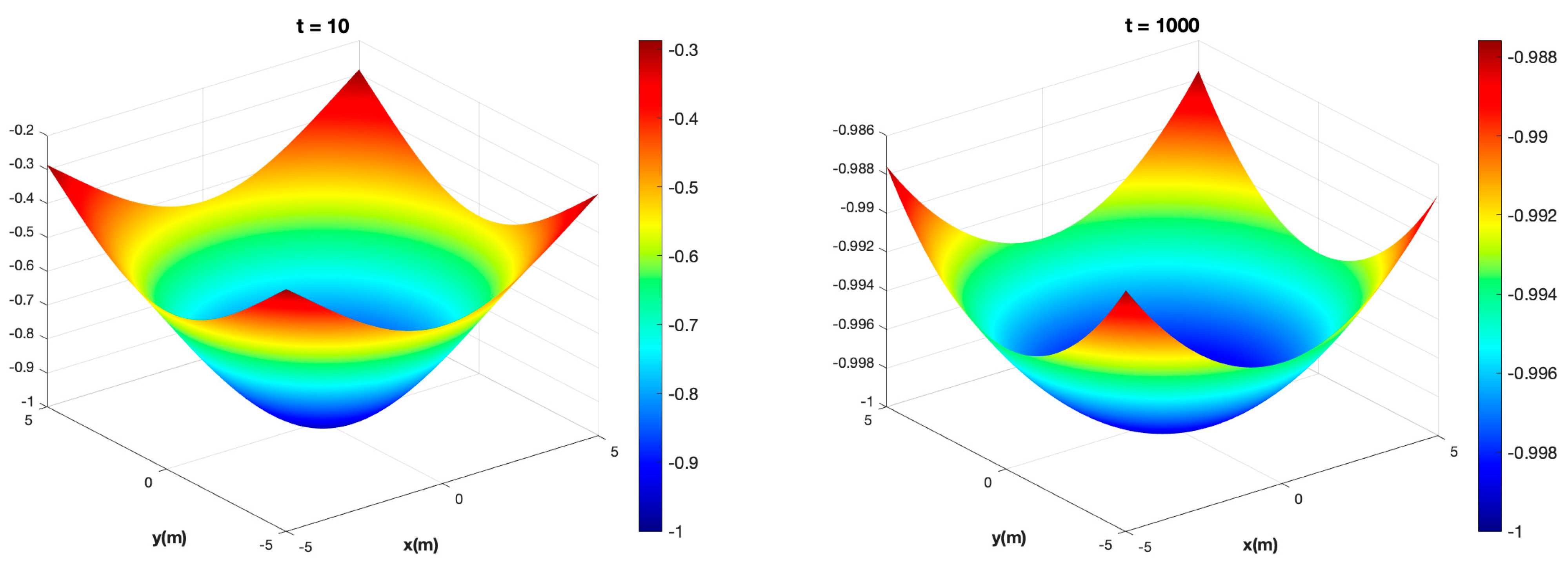
- Case 1: Reservoir produced with a single vertical well
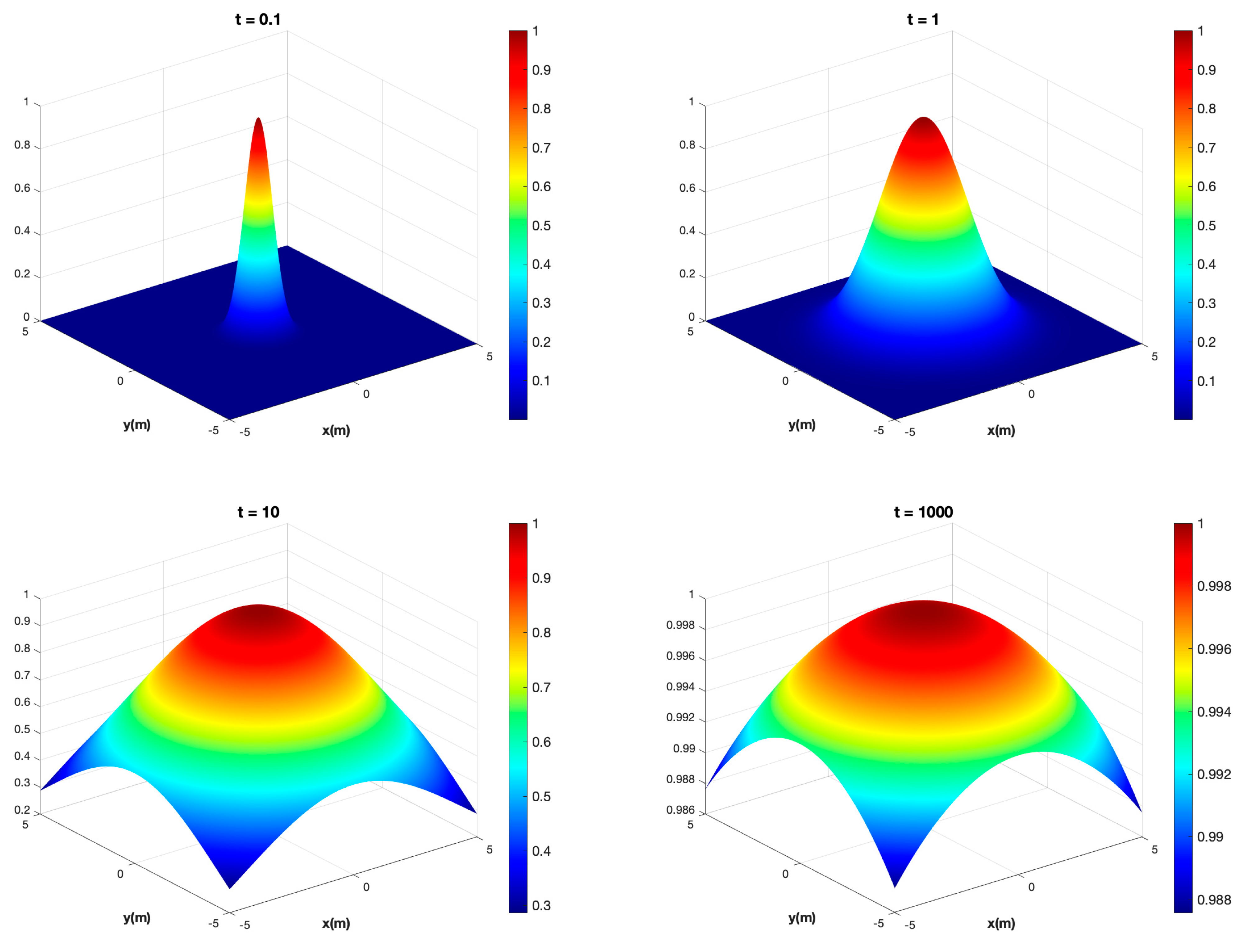
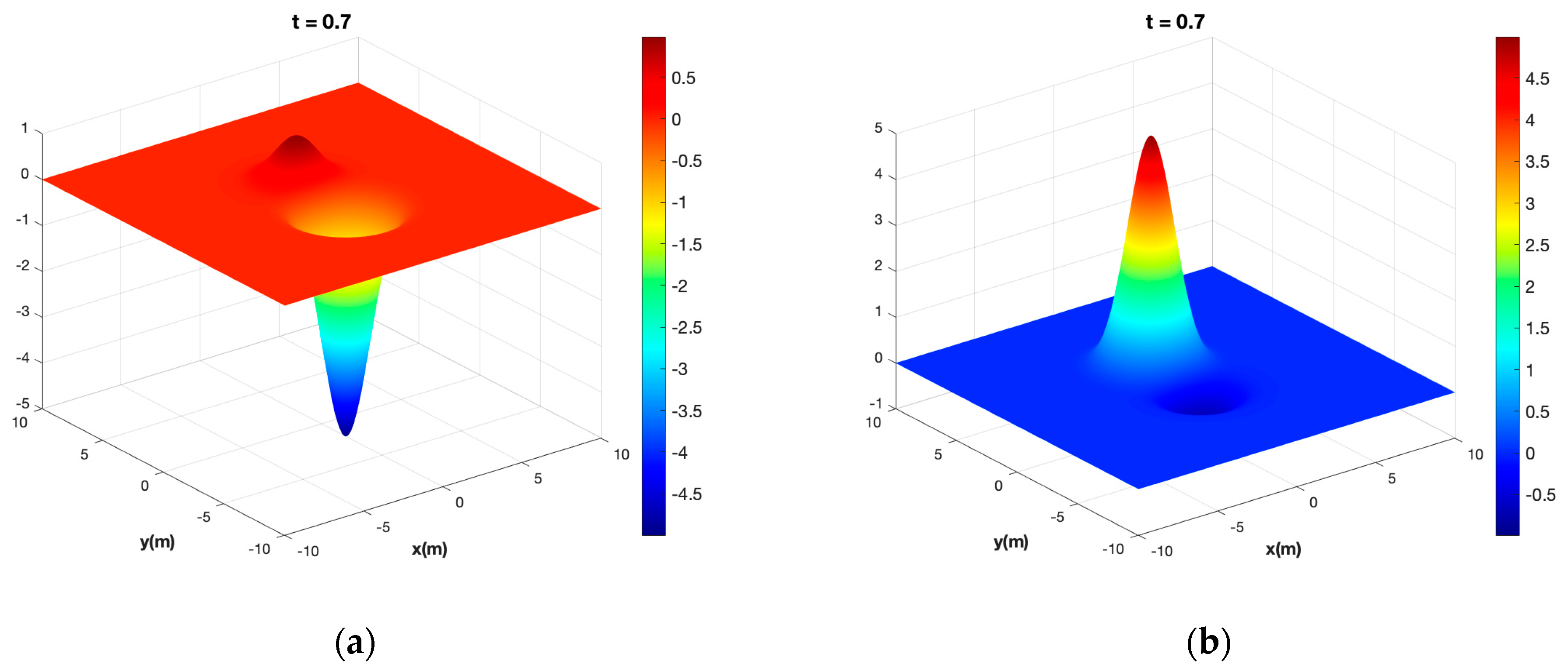
- Case 2: Reservoir injected through a single vertical well
- Case 3: Reservoir with a two-spot production system (one injector and one producer)
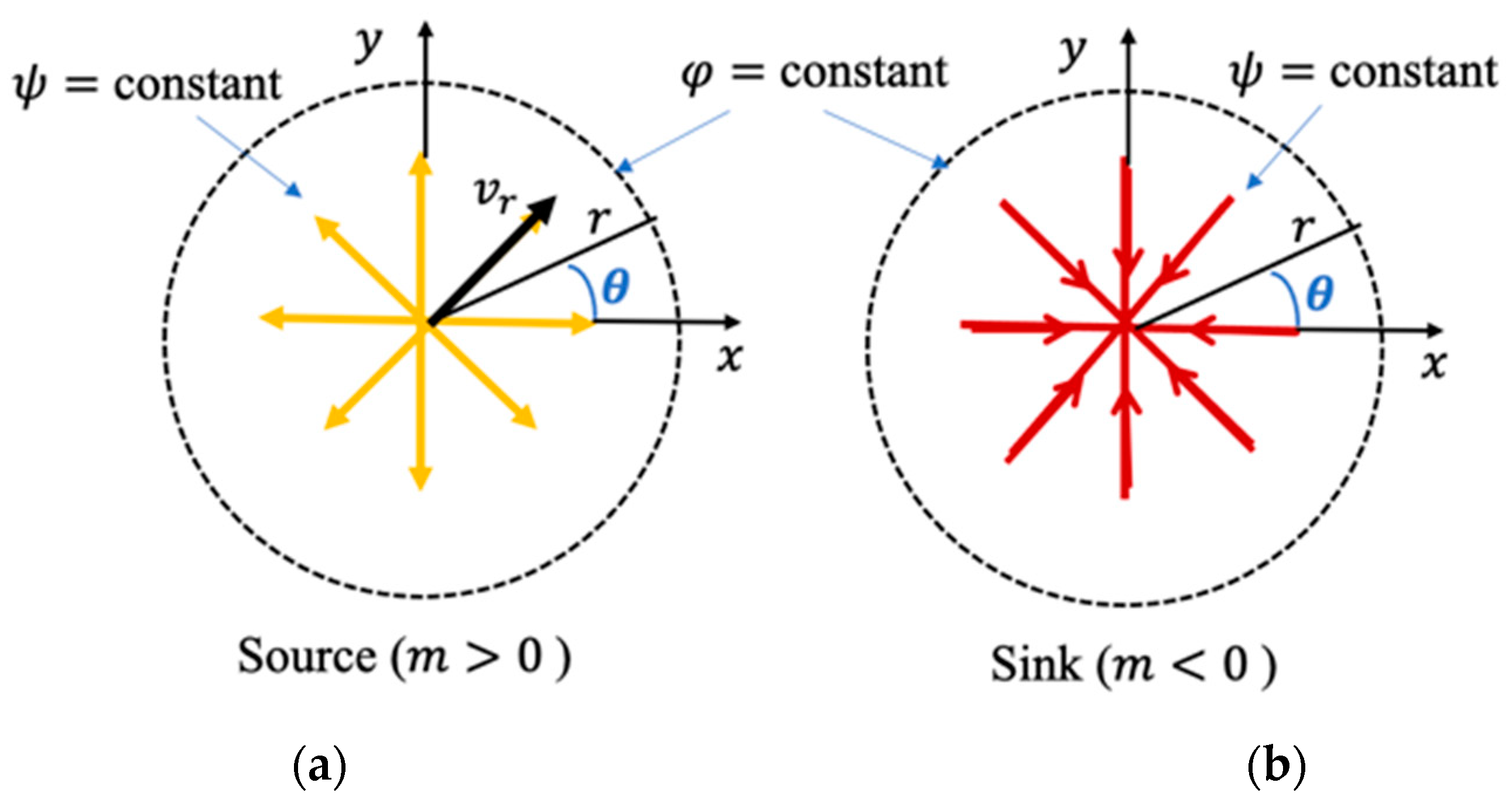
3. Fluid Flux and Flow Paths
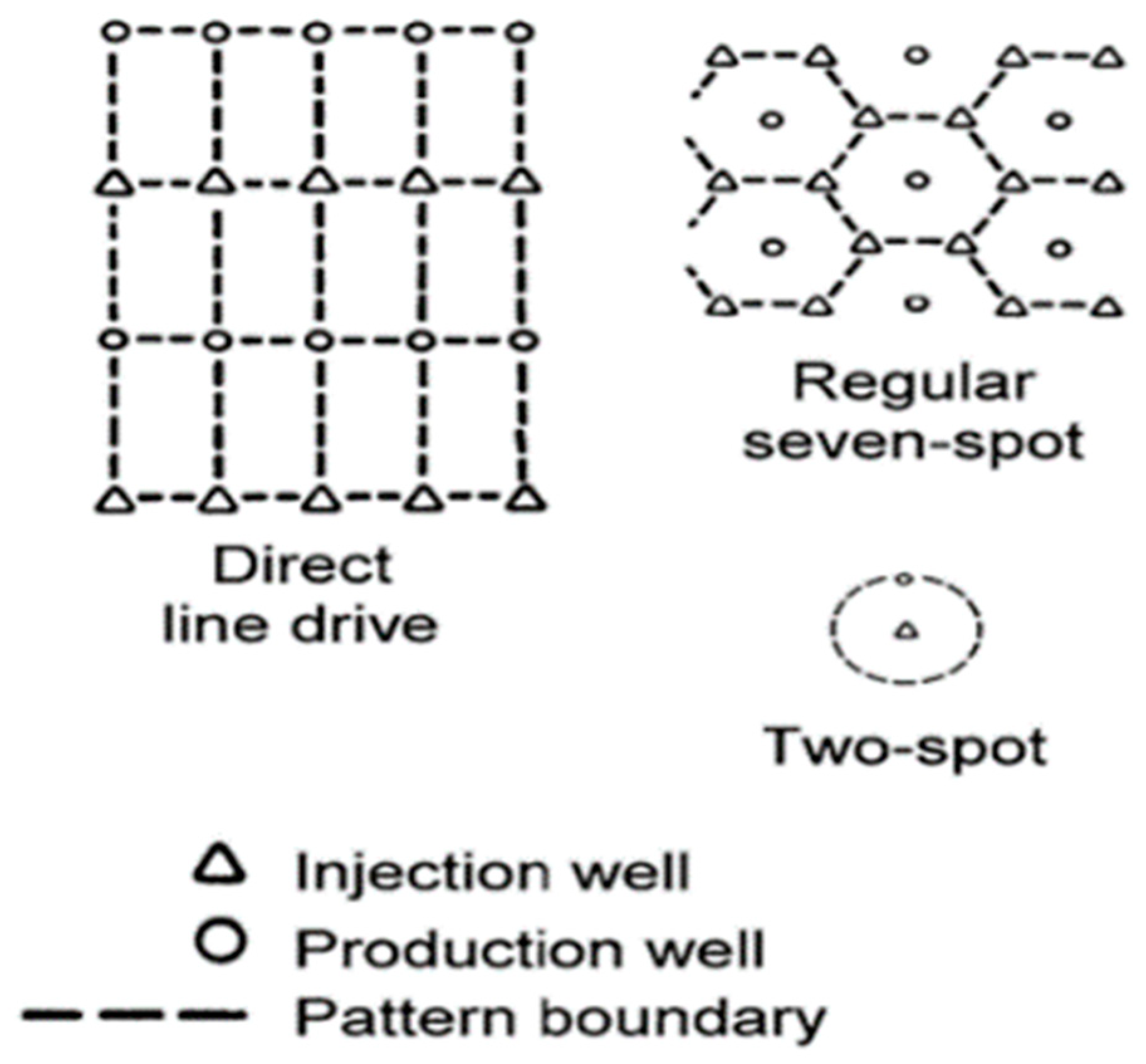
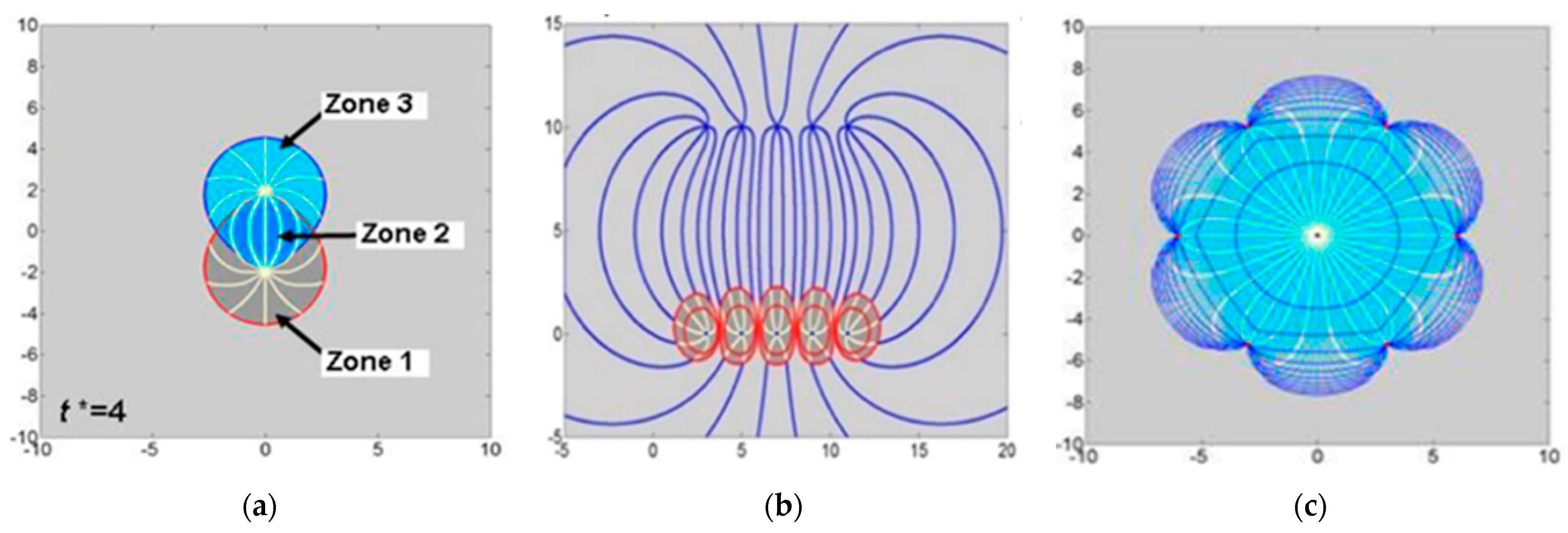
- Case 3: Doublet (two-spot well array)
- Case 4: Direct line drive (five-spot well array)
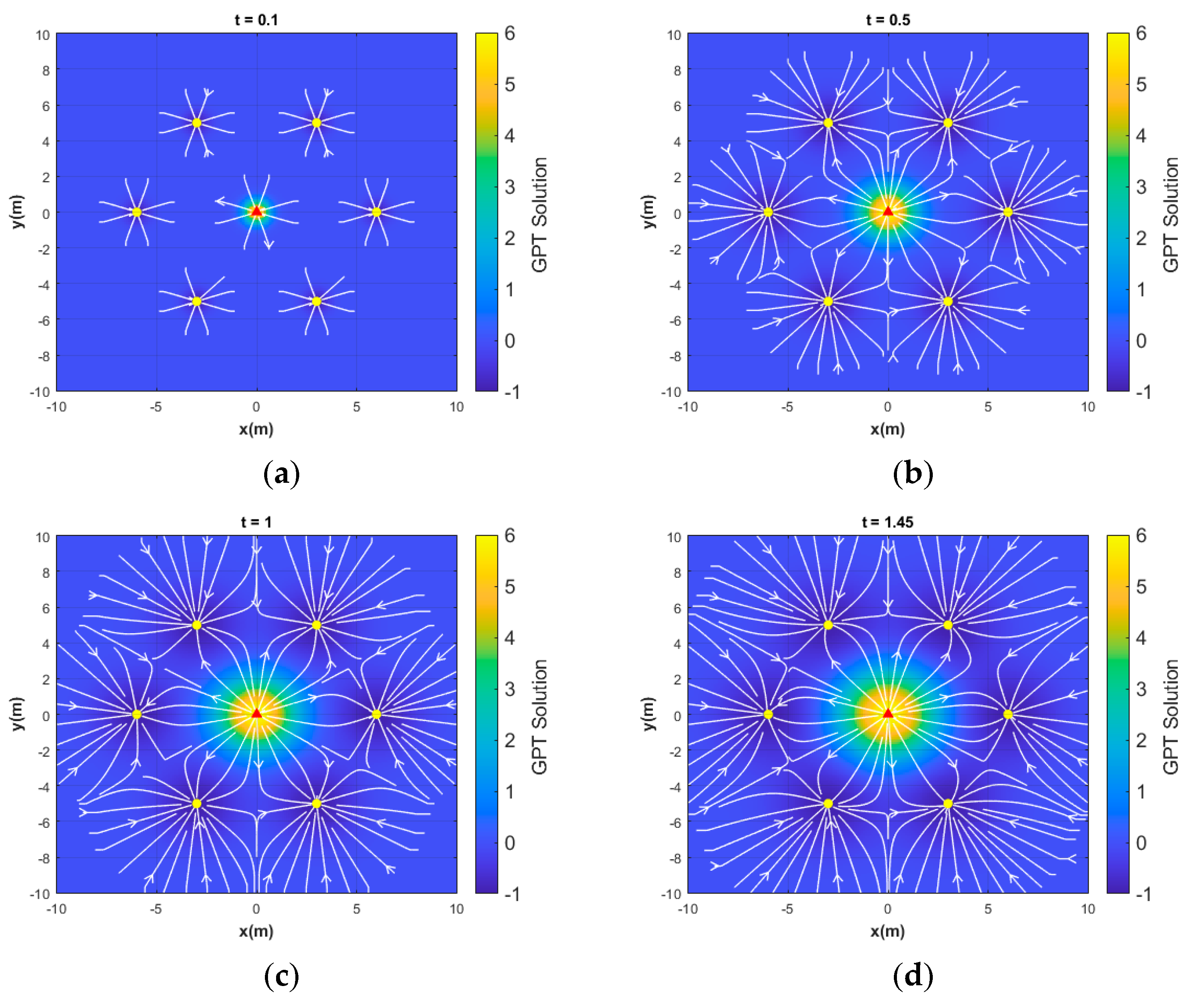
- Case 5: Seven-spot well pattern
4. Derivation of the Transient Stream Function and the Transient Potential Function
4.1. Fundamentals
4.2. Transient GPT Stream Function and Potential Function
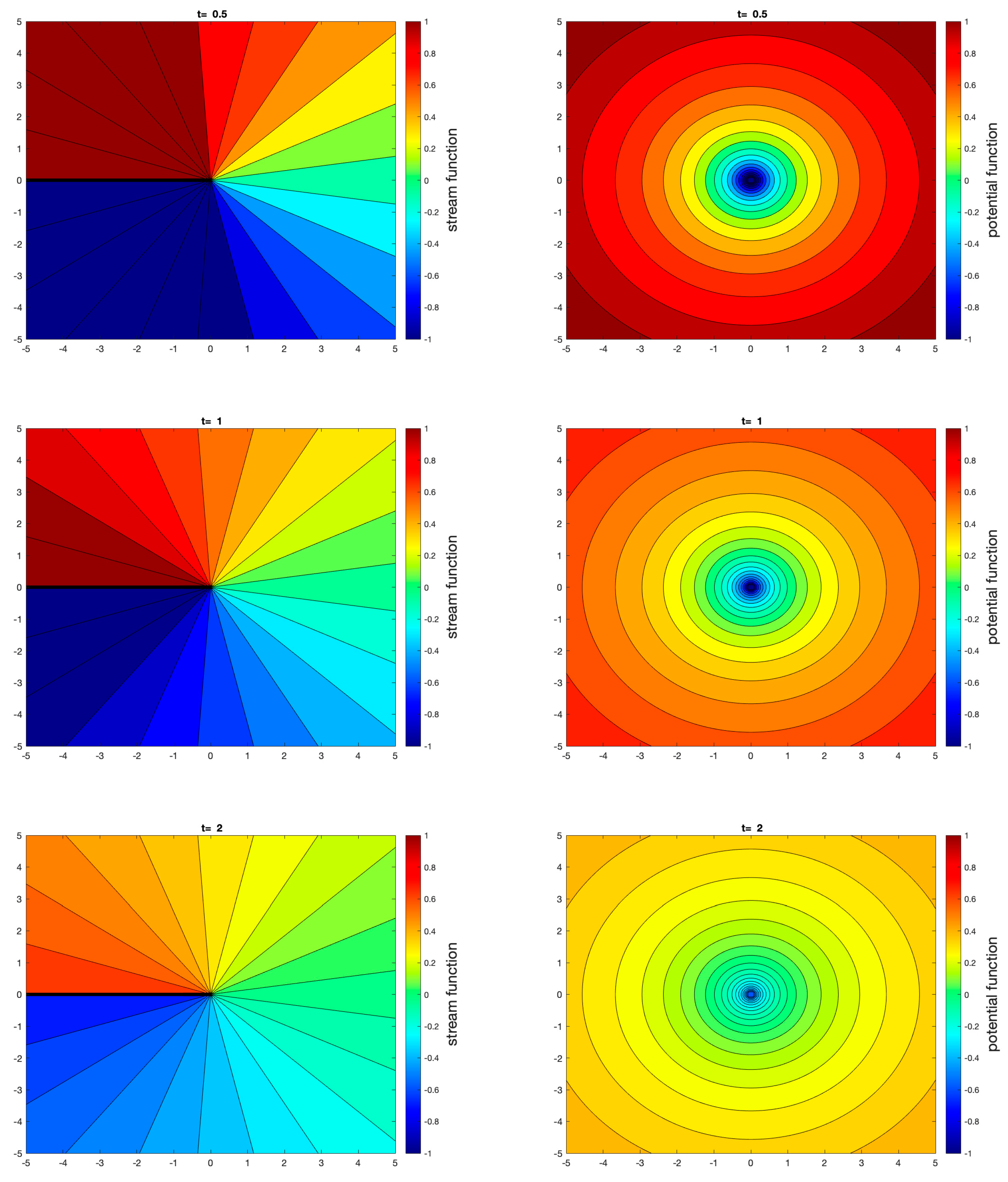
4.3. Plotting Transient Stream Function and Potential Function
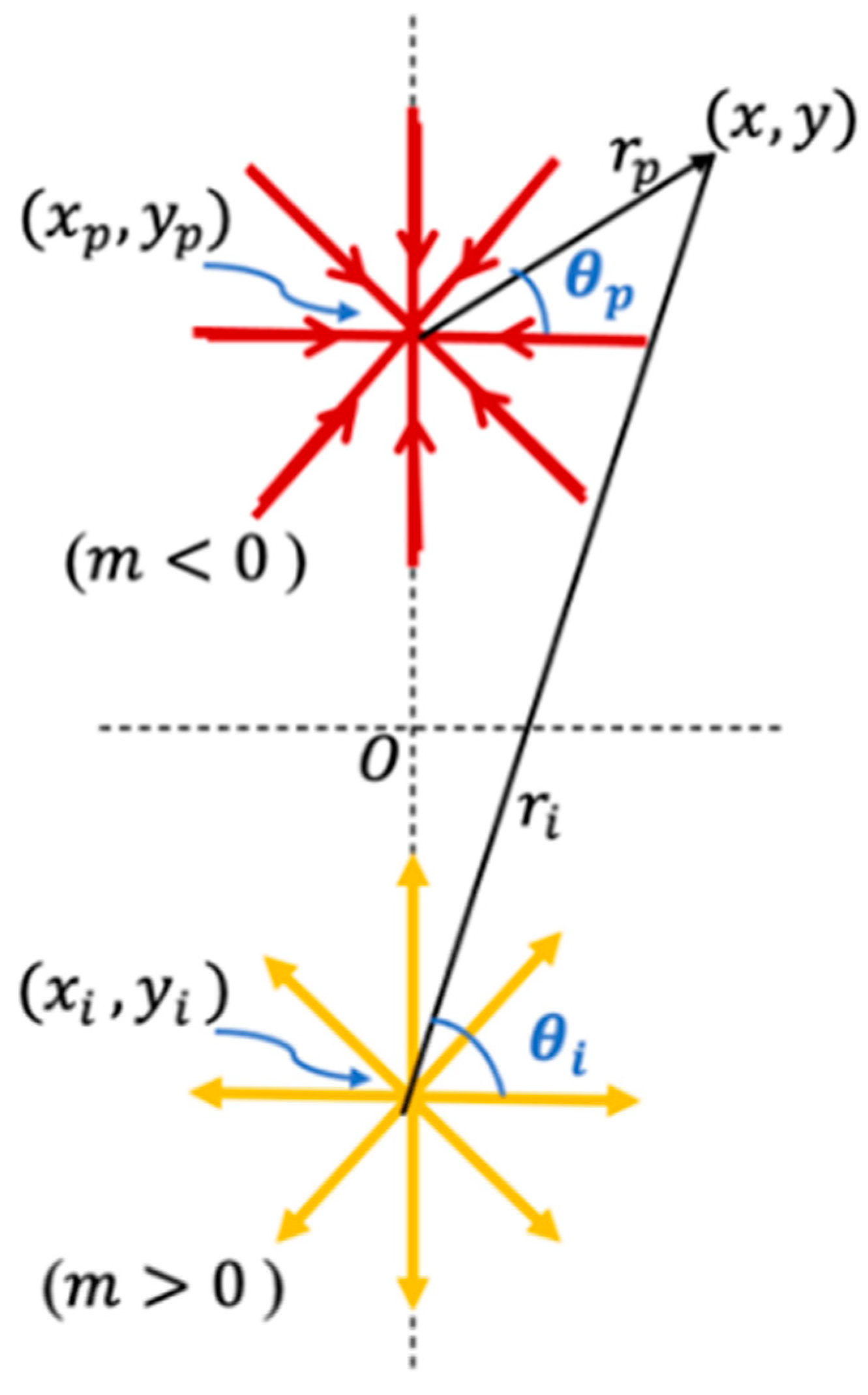
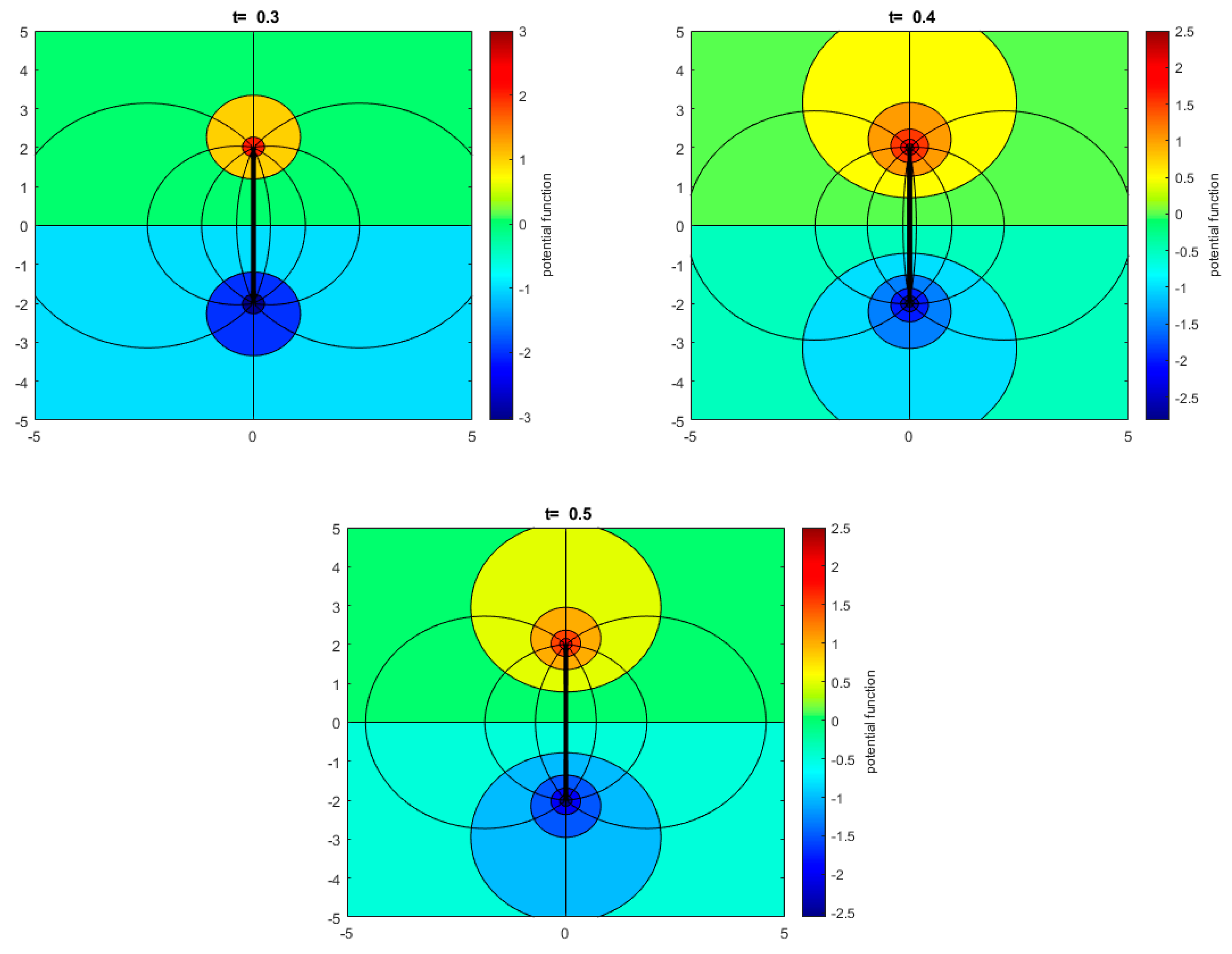
4.4. Transient Stream and Potential Functions for Balanced Doublets
4.5. Transient Stream and Potential Functions for Unbalanced Doublets
5. Discussion
5.1. Novelty of GPT Solutions for Stream and Potential Functions
5.2. Superposition of Pressure Transients
- (1)
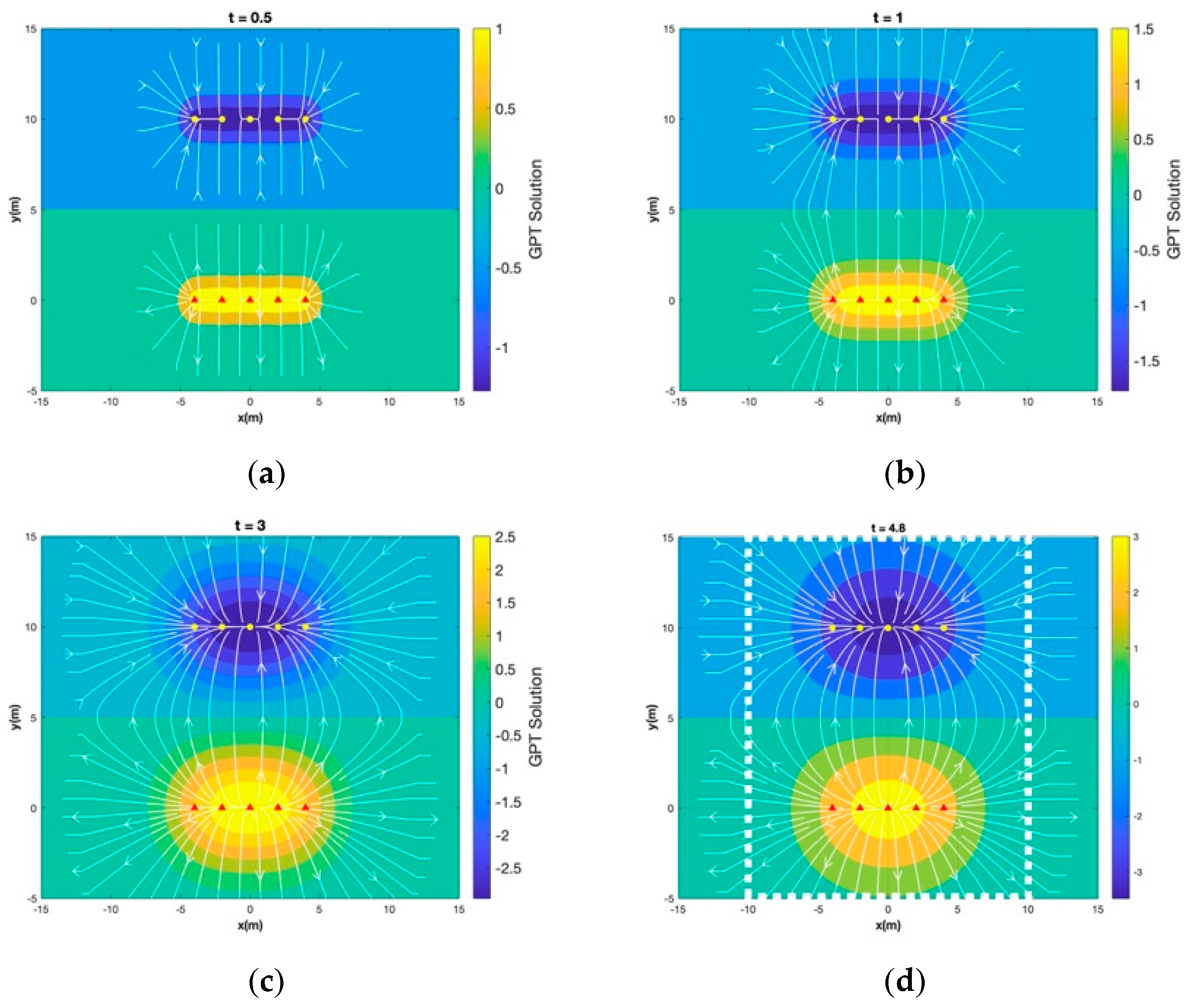
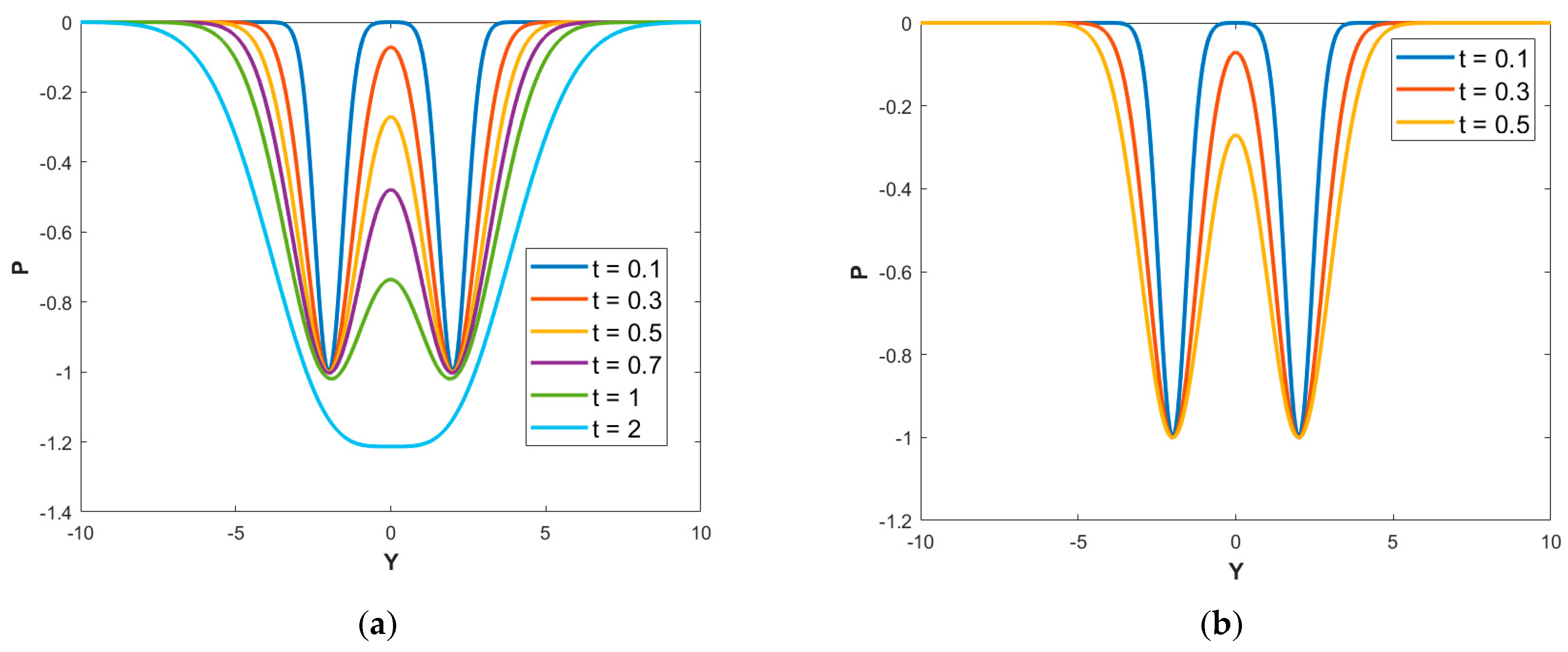
- When we arrest the pressure transient advance between a pair of producer wells to avoid the pressure dropping below the bottomhole pressure, as in Figure 23a, the far-field pressure advance is also frozen (Figure 23b). This can be overridden by continuing the advance of the pressure front in the far-field region, but this leads to an outer region with the time counter increasing, while in the inner region the time has already stopped (at ) when the bottomhole pressure is reached.
- (2)
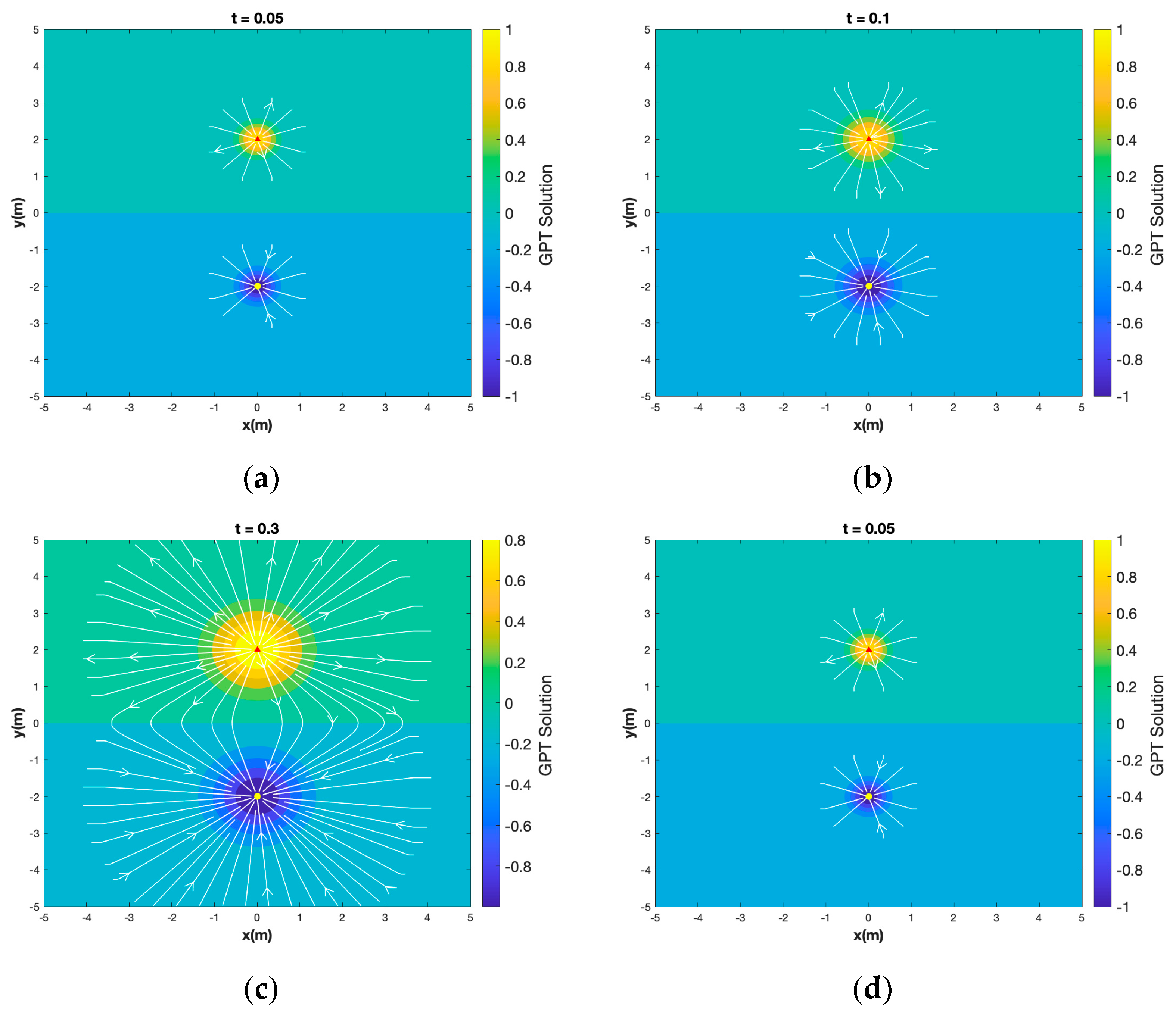
- For an injector and producer well pair, is introduced when the pressure profile between the wells has been established (Figure 11a). However, here the far-field pressure advance is also frozen, and the far-field pressure front would no longer advance in the far-field when the pressure profile in the inner region between the doublets has been established (a pseudo-steady state).
6. Conclusions
- Gaussian solutions of the diffusion equation can be used to visualize flow paths during transient pressure changes in subsurface reservoirs due to pressure gradients caused by engineering interventions.
- The Gaussian method was extended to compute and visualize velocity magnitude contours, streamlines, and other flow attributes in the vicinity of well systems that are depleting pressure in a reservoir.
- Stream function and potential function solutions were derived for instantaneous modeling of flow paths and pressure contour solutions of transient flows without time-stepping.
- The GPT method can compute the local pressure gradient analytically based on Gaussian pressure transients to model fluid flow and compute the fluid flux from the reservoir into the well system.
- The GPT method can predict fluid extraction rates and study the fluid origin in reservoirs; the method can also model fluid injection in subsurface reservoirs when used for the disposal or storage of certain fluids.
- The computational efficiency of the analytical GPT solution method compares favorably to numerical methods for sensitivity studies and well-placement optimization.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclatures
| Fluid velocity | Fluid viscosity | ||
| Fluid velocity in porous medium | Permeability | ||
| Velocity component in -direction | Porosity | ||
| Velocity component in -direction | Fluid density | ||
| Radial velocity | Formation volume factor | ||
| Tangential Velocity | Wellbore radius | ||
| Fluid flux (also called Darcy velocity) | Reservoir thickness | ||
| Darcy velocity in -direction | Gaussian probability-function | ||
| Darcy velocity in -direction | Half-length of a hydraulic fracture | ||
| Volumetric rate | Hydraulic diffusivity | ||
| Pressure | Diffusivity in -direction | ||
| Pressure change | Diffusivity in -direction | ||
| Local pressure change | Well strength (volumetric flow rate per unit length) | ||
| Initial reservoir pressure | Stream function | ||
| Bottomhole pressure | Potential function |
Appendix A. Dimensional Scaling of Physical Quantities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Dimension |
|---|---|---|
| Length; characteristic length unit | [L] | |
| Time; characteristic time unit | [T] | |
| Hydraulic diffusivity | [L2T−1] | |
| Pressure | [ML−1T−2] |
Appendix B. Coding Hints
- The computational domain (example, a = −5; b = 5),
- Number of mesh points in each direction (example, N = 10),
- The bottom hole pressure for injector(s) and/or producer(s),
- Well positions for injectors and/or producers (example, x_inj = 0; y_inj = 2; x_prod = 0; y_prod = −2),
- Time variable.
- Gaussian pressure transient (GPT) by applying Equation (9),
- The pressure gradient using MATLAB function (Px, Py) = gradient(-P),
- Stream function solution using Equations (18a), (21a), and (22a),
- Potential function solution using Equations (18b), (21b), and (22b).
- The flow paths can be visualized using the MATLAB function streamslice(x, y, Px, Py), which automatically draws spaced streamlines from the 2D vector data Px and Py that represent the Darcy velocity components computed in the third step using the gradient.
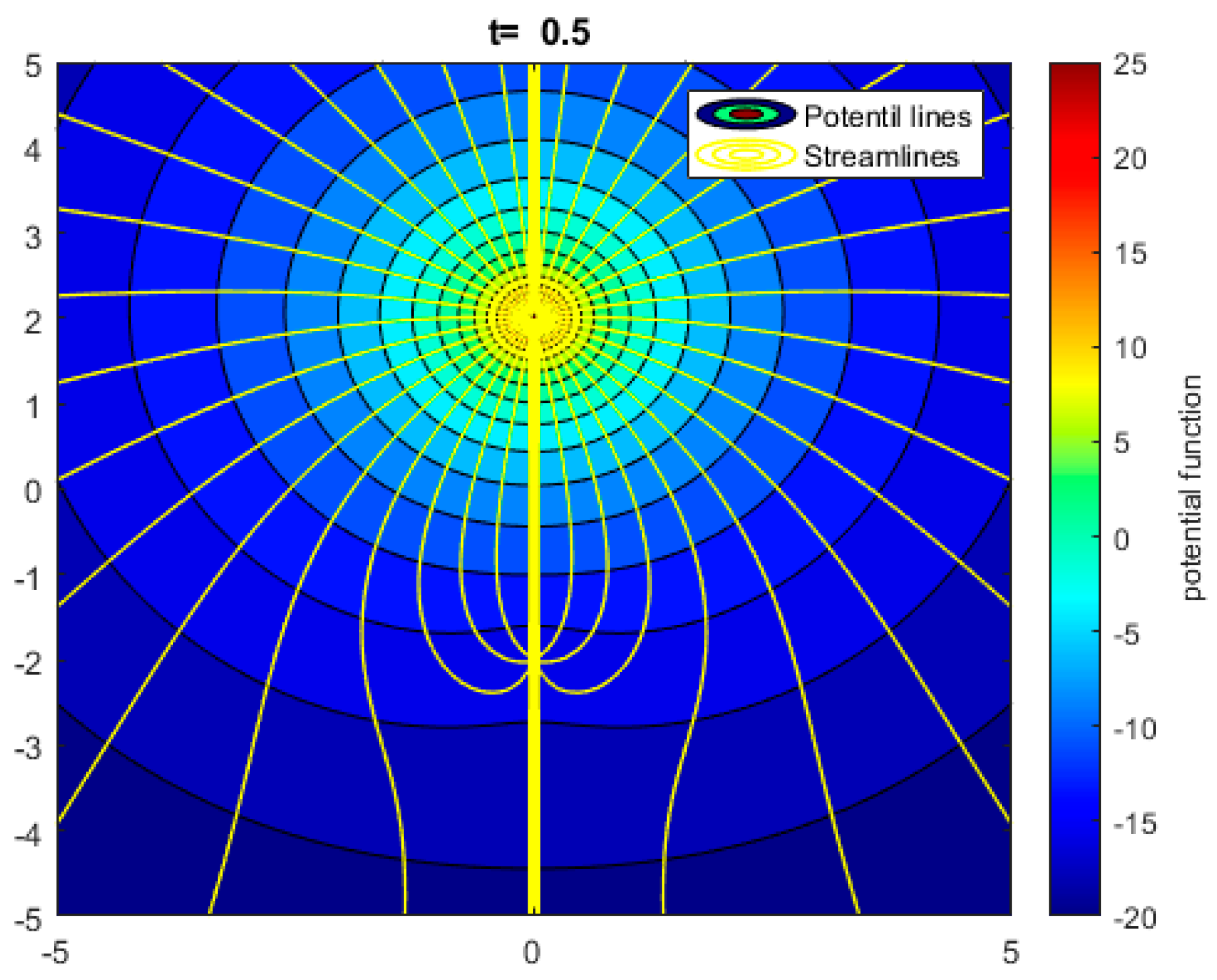
- The solution of the stream and potential functions in Figure 18, Figure 20 and Figure 21 are plotted using contour (x, y, Psi) for the stream function solution and contour (x, y, Phi) for the potential function solution. To combine the plot of the stream function solution and the plot of the potential function solution in one figure, use the MATLAB function hold on.

References
- van Harmelen, A.; Weijermars, R. Complex analytical solutions for flow in hydraulically fractured hydrocarbon reservoirs with and without natural fractures. Appl. Math. Model. 2018, 56, 137–157. [Google Scholar] [CrossRef]
- Nelson, R.; Zuo, L.; Weijermars, R.; Crowdy, D. Applying improved analytical methods for modelling flood displacement fronts in bounded reservoirs (Quitman field, east Texas). J. Pet. Sci. Eng. 2018, 166, 1018–1041. [Google Scholar] [CrossRef]
- Weijermars, R.; van Harmelen, A.; Zuo, L. Controlling flood displacement fronts using a parallel analytical streamline simulator. J. Pet. Sci. Eng. 2016, 139, 23–42. [Google Scholar] [CrossRef]
- Pollock, D.W. Semianalytical Computation of Path Lines for Finite-Difference Models. Groundwater 1988, 26, 743–750. [Google Scholar] [CrossRef]
- Cordes, C.; Kinzelbach, W. Continuous groundwater velocity fields and path lines in linear, bilinear, and trilinear finite elements. Water Resour. Res. 1992, 28, 2903–2911. [Google Scholar] [CrossRef]
- Lake, L.W.; Johnston, J.R.; Stegemeier, G.L. Simulation and performance prediction of a large-scale surfactant/polymer project. Soc. Pet. Eng. J. 1981, 21, 731–739. [Google Scholar] [CrossRef]
- Malik, M.; Afzal, M.; Tariq, G.; Ahmed, N. Mathematical modeling and computer simulation of transient flow in centrifuge cascade pipe network with optimizing techniques. Comput. Math. Appl. 1998, 36, 63–76. [Google Scholar] [CrossRef]
- Wenlong, J.; Xia, W. Modeling and Simulation for Steady State and Transient Pipe Flow of Condensate Gas. In Thermodynamics: Kinetics of Dynamic Systems; IntechOpen: London, UK, 2011; pp. 65–84. [Google Scholar]
- Liu, T.; Zhong, H.-Q.; Li, Y.-C. Transient Simulation of Wellbore Pressure and Temperature During Gas-Well Testing. J. Energy Resour. Technol. 2014, 136, 032902. [Google Scholar] [CrossRef]
- Agaie, B.G.; Mbaya, J.H.; Ibrahim, A.; Sani, U. Modeling and simulation of transient flow characteristics in a producing gas well. Sci-Ence World J. 2020, 15, 38–44. [Google Scholar]
- Fyk, M.; Biletskyi, V.; Abbood, M.; Al-Sultan, M.; Abbood, M.; Abdullatif, H.; Shapchenko, Y. Modeling of the lifting of a heat transfer agent in a geothermal well of a gas condensate deposit. Min. Miner. Depos. 2020, 14, 66–74. [Google Scholar] [CrossRef]
- Wu, Y.-S.; Pan, L. Special relative permeability functions with analytical solutions for transient flow into unsaturated rock matrix. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Wu, Y.-S.; Pan, L. An analytical solution for transient radial flow through unsaturated fractured porous media. Water Resour. Res. 2005, 41, 1–20. [Google Scholar] [CrossRef]
- Lu, Y.-H.; Chen, K.-P.; Jin, Y.; Li, H.-D.; Xie, Q. An approximate analytical solution for transient gas flows in a vertically fractured well of finite fracture conductivity. Pet. Sci. 2022, 19, 3059–3067. [Google Scholar] [CrossRef]
- Amadei, B.; Savage, W. An analytical solution for transient flow of Bingham viscoplastic materials in rock fractures. Int. J. Rock Mech. Min. Sci. 2001, 38, 285–296. [Google Scholar] [CrossRef]
- Weijermars, R. Diffusive Mass Transfer and Gaussian Pressure Transient Solutions for Porous Media. Fluids 2021, 6, 379. [Google Scholar] [CrossRef]
- Weijermars, R. Production rate of multi-fractured wells modeled with Gaussian pressure transients. J. Pet. Sci. Eng. 2021, 210, 110027. [Google Scholar] [CrossRef]
- Weijermars, R.; Afagwu, C. Hydraulic diffusivity estimations for US shale gas reservoirs with Gaussian method: Implications for pore-scale diffusion processes in underground repositories. J. Nat. Gas Sci. Eng. 2022, 106, 104682. [Google Scholar] [CrossRef]
- Weijermars, R.; van Harmelen, A. Advancement of sweep zones in waterflooding: Conceptual insight based on flow visualizations of oil-withdrawal contours and waterflood time-of-flight contours using complex potentials. J. Pet. Explor. Prod. Technol. 2017, 7, 785–812. [Google Scholar] [CrossRef]
- Weijermars, R. Visualization of space competition and plume formation with complex potentials for multiple source flows: Some examples and novel application to Chao lava flow (Chile). J. Geophys. Res. Solid Earth 2014, 119, 2397–2414. [Google Scholar] [CrossRef]
- Wang, L.; Zuo, L.; Zhu, C. Tracer Test and Streamline Simulation for Geothermal Resources in Cuona of Tibet. Fluids 2020, 5, 128. [Google Scholar] [CrossRef]
- Weijermars, R.; Khanal, A.; Zuo, L. Fast Models of Hydrocarbon Migration Paths and Pressure Depletion Based on Complex Analysis Methods (CAM): Mini-Review and Verification. Fluids 2020, 5, 7. [Google Scholar] [CrossRef]
- Bear, J. Dynamics of Fluids in Porous Media; Dover Publications: Mineola, NY, USA, 1988. [Google Scholar]
- Weijermars, R.; Poliakov, A. Stream functions and complex potentials: Implications for development of rock fabric and the continu-um assumption. Tectonophysics 1993, 220, 33–50. [Google Scholar] [CrossRef]
- Tey, W.Y.; Lam, W.H.; Teng, K.H.; Wong, K.Y. Semi-Analytical Method for Unsymmetrical Doublet Flow Using Sink- and Source-Dominant Formulation. Symmetry 2022, 14, 391. [Google Scholar] [CrossRef]
- Weijermars, R. Principles of Rock Mechanics; Alboran Science Publishing: Amsterdam, The Netherlands, 1997. [Google Scholar]
- Gerhart, P.M.; Gerhart, A.L.; Hochstein, J.I. Munson, Young and Okiishi’s Fundamentals of Fluid Mechanics; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- De Nevers, N.; Silcox, G.D. Fluid Mechanics for Chemical Engineers; McGraw-Hill Education: New York, NY, USA, 2021. [Google Scholar]
























| Injector location | |
| Well pressure | |
| Initial pressure | |
| Diffusivity | |
| Time | |
| Permeability | |
| Fluid viscosity |
| Injector location | |
| Producer location | |
| Well pressure (injector) | |
| Well pressure (producer) | |
| Initial pressure | |
| Diffusivity | |
| Time | |
| Permeability | |
| Fluid viscosity |
| Injector location | |
| Producer location | |
| Well pressure (injector) | |
| Well pressure (producer) | |
| Initial pressure | |
| Diffusivity | |
| Time | |
| Permeability | |
| Fluid viscosity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alotaibi, M.; Alotaibi, S.; Weijermars, R. Stream and Potential Functions for Transient Flow Simulations in Porous Media with Pressure-Controlled Well Systems. Fluids 2023, 8, 160. https://doi.org/10.3390/fluids8050160
Alotaibi M, Alotaibi S, Weijermars R. Stream and Potential Functions for Transient Flow Simulations in Porous Media with Pressure-Controlled Well Systems. Fluids. 2023; 8(5):160. https://doi.org/10.3390/fluids8050160
Chicago/Turabian StyleAlotaibi, Manal, Shoug Alotaibi, and Ruud Weijermars. 2023. "Stream and Potential Functions for Transient Flow Simulations in Porous Media with Pressure-Controlled Well Systems" Fluids 8, no. 5: 160. https://doi.org/10.3390/fluids8050160